Laboratorium Podstaw Automatyki i Regulacji Automatycznej II
1
4
Bloki czasowe i liczniki
Informacje wst
ę
pne:
BLOKI CZASOWE
Sterowniki serii 90-30, VersaMax, VersaMax Micro i Nano maj
ą
do wyboru nast
ę
puj
ą
ce przeka
ź
niki czasowe:
TMR - realizuje zliczanie czasu do warto
ś
ci zadanej (PV); ka
ż
dorazowe wył
ą
czenie bloku powoduje
wyzerowanie aktualnie zliczonej warto
ś
ci czasu; odmierzenie zadanego odcinka czasu powoduje
wysyłanie sygnału na wyj
ś
cie bloku.
ONDTR - realizuje zliczanie czasu do warto
ś
ci zadanej PV; przerwanie zliczania nie powoduje
wyzerowania aktualnej warto
ś
ci zliczonego czasu; po odliczeniu zadanego czasu zostaje wysłany
sygnał na wyj
ś
cie bloku; blok posiada wej
ś
cie zeruj
ą
ce.
OFDT - ka
ż
dorazowe zał
ą
czenie bloku (chocia
ż
by na chwil
ę
) powoduje wysłanie sygnału na wyj
ś
cie
bloku na zadany czas (warto
ś
ci
ą
PV).
Bloki czasowe mog
ą
odmierza
ć
czas z ró
ż
n
ą
rozdzielczo
ś
ci
ą
(np. 0.1 s, 0.01 s, 0.001 s). St
ą
d w bibliotece dla
serii 90-30, VersaMax, VersaMax Micro i Nano dost
ę
pne s
ą
nast
ę
puj
ą
ce typy bloków funkcyjnych:
−
ONDTR_THOUS, OFDT_ THOUS, TMR_ THOUS – bloki operuj
ą
ce na jednostce czasu 0,001 s;
−
ONDTR_HUNDS, OFDT_HUNDS, TMR_HUNDS – bloki operuj
ą
ce na jednostce czasu 0.01 s;
−
ONDTR_TENTHS, OFDT_ TENTHS, TMR_ TENTHS – bloki operuj
ą
ce na jednostce czasu 0,1 s.
Przeka
ź
niki czasowe z postaw
ą
czasu 1 s mo
ż
na stosowa
ć
jedynie w programach dla sterowników serii
PACSystems.
−
ONDTR_SEC, OFDT_ SEC, TMR_ SEC – bloki operuj
ą
ce na jednostce czasu 1 s.
Ka
ż
dy blok czasowy posiada parametr Address - dla danego bloku nale
ż
y zarezerwowa
ć
3 rejestry jako
adres. W pierwszym z nich przechowywana jest warto
ść
bie
żą
ca zliczanego czasu (CV), w drugim warto
ść
zadana (parametr PV), a w trzecim status. Rejestry adresowe ró
ż
nych bloków nie mog
ą
zachodzi
ć
na siebie.
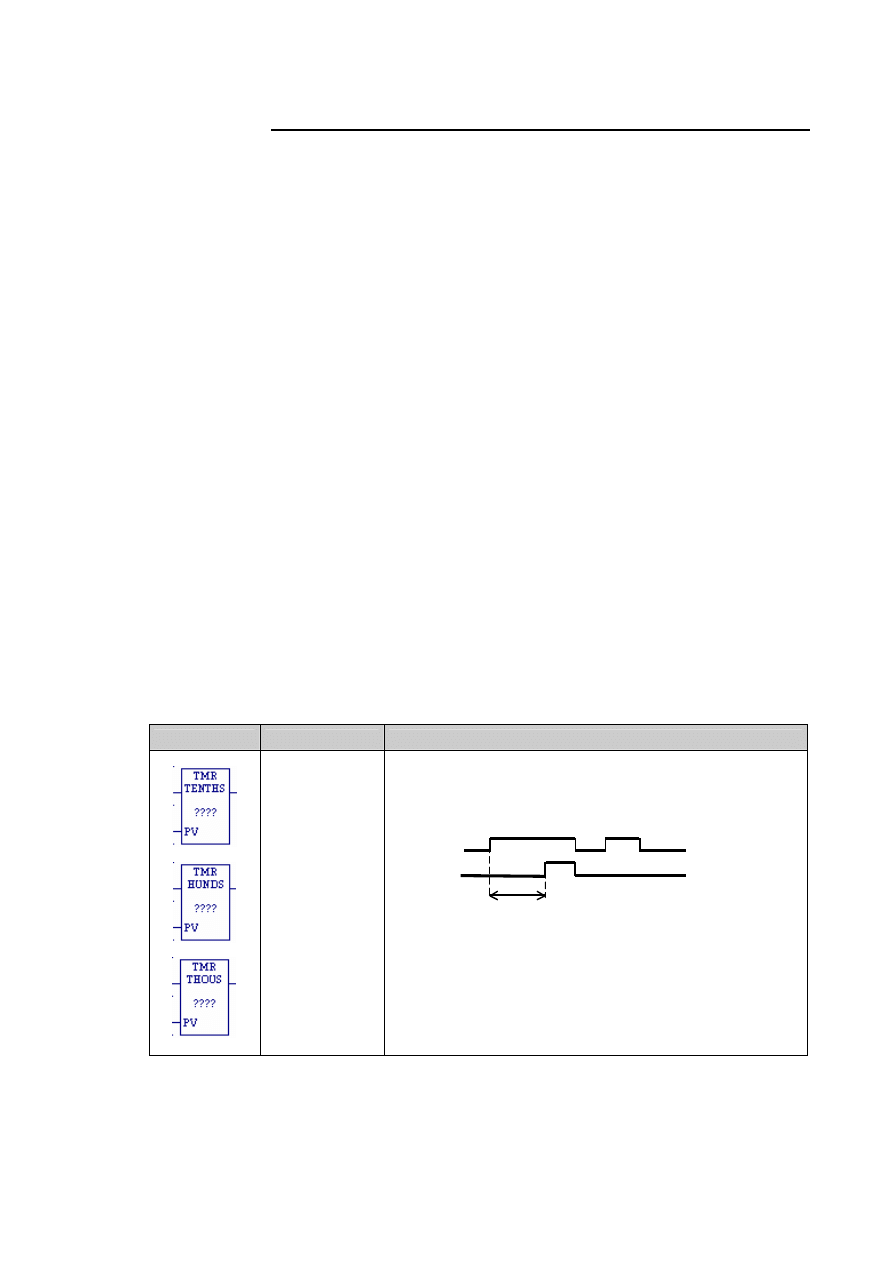
BLOK TMR
Blok funkcyjny Typ argumentów
Opis
PV: INT
address: 3 WORD
Blok TMR powoduje opó
ź
nienie zał
ą
czenia sygnału wyj
ś
ciowego
w stosunku do wej
ś
ciowego.
Blok TMR_TENTHS odlicza czas co 0.1 s, gdy Enable=1. Czas
opó
ź
nienia = PV
∗
0.1 s.
Enabl
e
PV
PV
∗
0.1 s
Blok TMR_HUNDS odlicza czas co 0.01 s. Czas opó
ź
nienia =
PV
∗
0.01 s.
Blok TMR_THOUS odlicza czas co 0.001 s. Czas opó
ź
nienia =
PV
∗
0.001 s.
Gdy warto
ść
bie
żą
ca CV osi
ą
gnie warto
ść
zadan
ą
PV, to wystawia
jedynk
ę
na wyj
ś
ciu Q i dopóki Enable=1 odlicza czas dalej, a
ż
do
osi
ą
gni
ę
cia maksymalnej warto
ś
ci INT. Je
ś
li Enable=0, to warto
ść
bie
żą
ca zostaje wyzerowana i stan na wyj
ś
ciu Q=0.
Poni
ż
sza tabela przedstawia list
ę
referencji, które mog
ą
by
ć
parametrami wej
ś
ciowymi i wyj
ś
ciowymi bloku
TMR. Je
ż
eli parametr wej
ś
ciowy jest typu Przepływ (Flow), to nale
ż
y do niego podpi
ąć
symbol styku lub
przewód do linii zasilania. Je
ż
eli parametr wyj
ś
ciowy jest typu Przepływ (Flow), to nale
ż
y do niego doł
ą
czy
ć
symbol cewki.
Bloki czasowe i liczniki
2
Laboratorium Podstaw Automatyki i Regulacji Automatycznej II
Parametr Przepływ
%I
%Q
%M
%T
%S
%G
%R
%AI
%AQ Stała Brak
address
•
enable
•
PV
•
•
•
•
•
•
•
•
•
•
Q
•
•
• Dozwolony typ parametru.
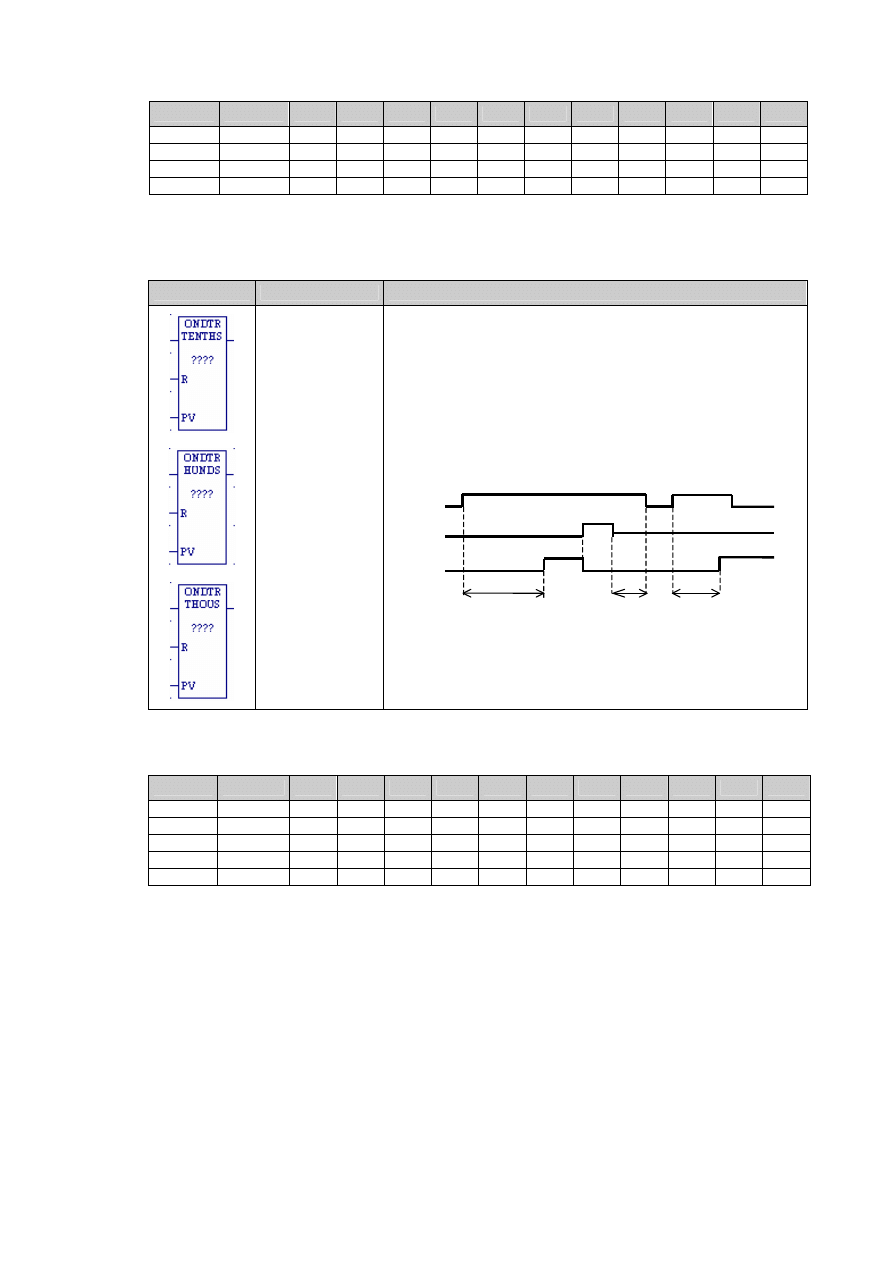
BLOK ONDTR
Blok funkcyjny Typ argumentów
Opis
R: BOOL
PV: INT
address: 3 WORD
Blok ONDTR działa podobnie jak blok TMR, czyli powoduje
opó
ź
nienie zał
ą
czenia sygnału wyj
ś
ciowego w stosunku do
wej
ś
ciowego. Ró
ż
nica polega na tym,
ż
e Enable=0 nie powoduje
wyzerowania warto
ś
ci bie
żą
cej zliczanego czasu, dzi
ę
ki czemu
mo
ż
na zlicza
ć
czas „na raty”. Zerowanie warto
ś
ci bie
żą
cej odbywa
si
ę
przez podanie jedynki na wej
ś
cie R.
Enable
R
Q
PV * 0.01 s
t1
t2
t1 + t2 = PV*0.01 s
Poni
ż
sza tabela przedstawia list
ę
referencji, które mog
ą
by
ć
parametrami wej
ś
ciowymi i wyj
ś
ciowymi bloku
ONDTR.
Parametr Przepływ
%I
%Q
%M
%T
%S
%G
%R
%AI
%AQ Stała Brak
address
•
enable
•
R
•
PV
•
•
•
•
•
•
•
•
•
•
Q
•
•
• Dozwolony typ parametru
Bloki czasowe i liczniki
Laboratorium Podstaw Automatyki i Regulacji Automatycznej II
3
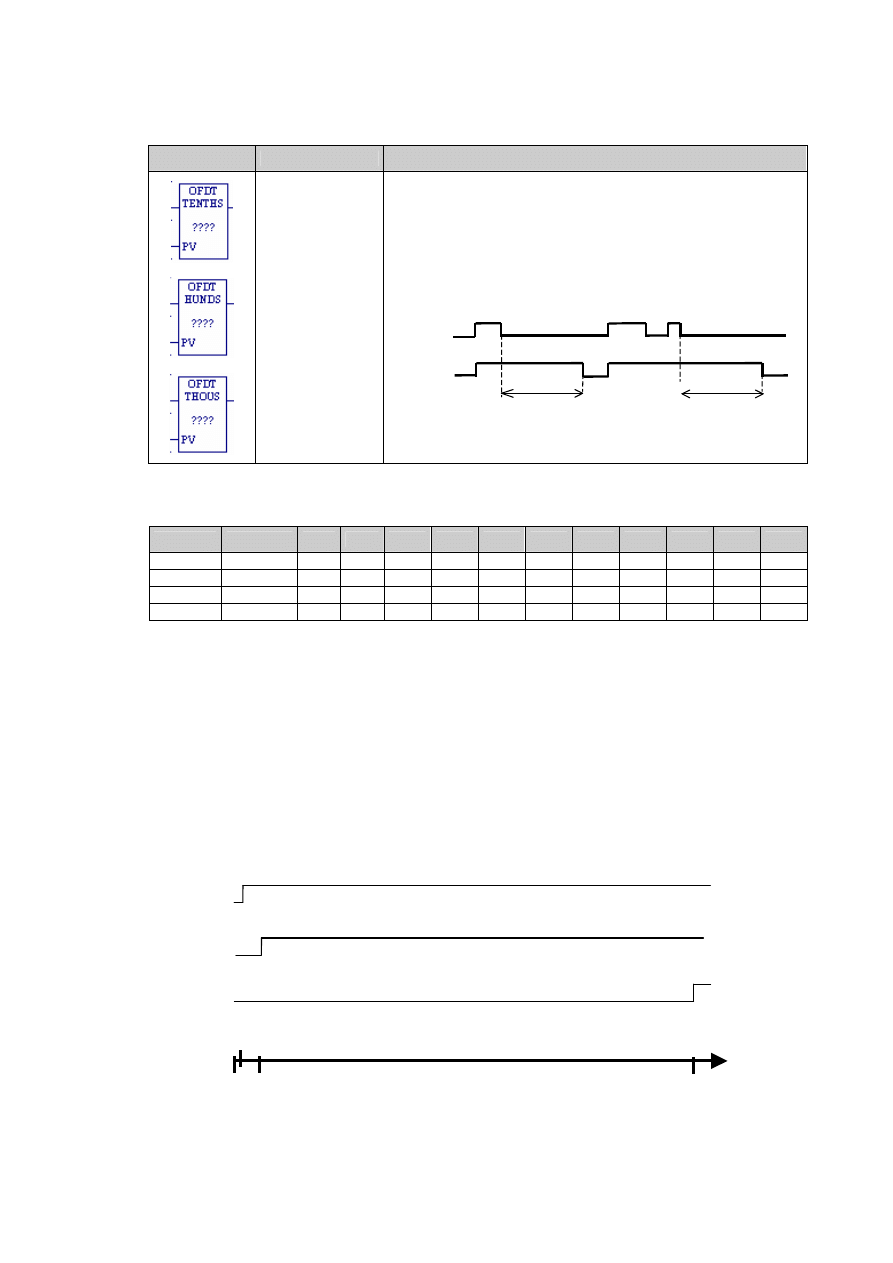
BLOK OFDT
Blok funkcyjny Typ argumentów
Opis
PV: INT
address: 3 WORD
Blok OFDT powoduje opó
ź
nienie wył
ą
czenia sygnału wyj
ś
ciowego
w stosunku do wej
ś
ciowego. Wystawia jedynk
ę
na wyj
ś
ciu Q od razu
po podaniu jedynki na wej
ś
cie Enable oraz zeruje warto
ść
bie
żą
c
ą
(CV). Gdy sygnał Enable spada do zera zaczyna odlicza
ć
czas, po
którym ma wył
ą
czy
ć
wyj
ś
cie Q.
Enable
Q
PV * 0.01 s
PV * 0.01 s
Poni
ż
sza tabela przedstawia list
ę
referencji, które mog
ą
by
ć
parametrami wej
ś
ciowymi i wyj
ś
ciowymi bloku
OFDT.
Parametr Przepływ
%I
%Q
%M
%T
%S
%G
%R
%AI
%AQ Stała Brak
address
•
enable
•
PV
•
•
•
•
•
•
•
•
•
•
Q
•
•
• Dozwolony typ parametru.
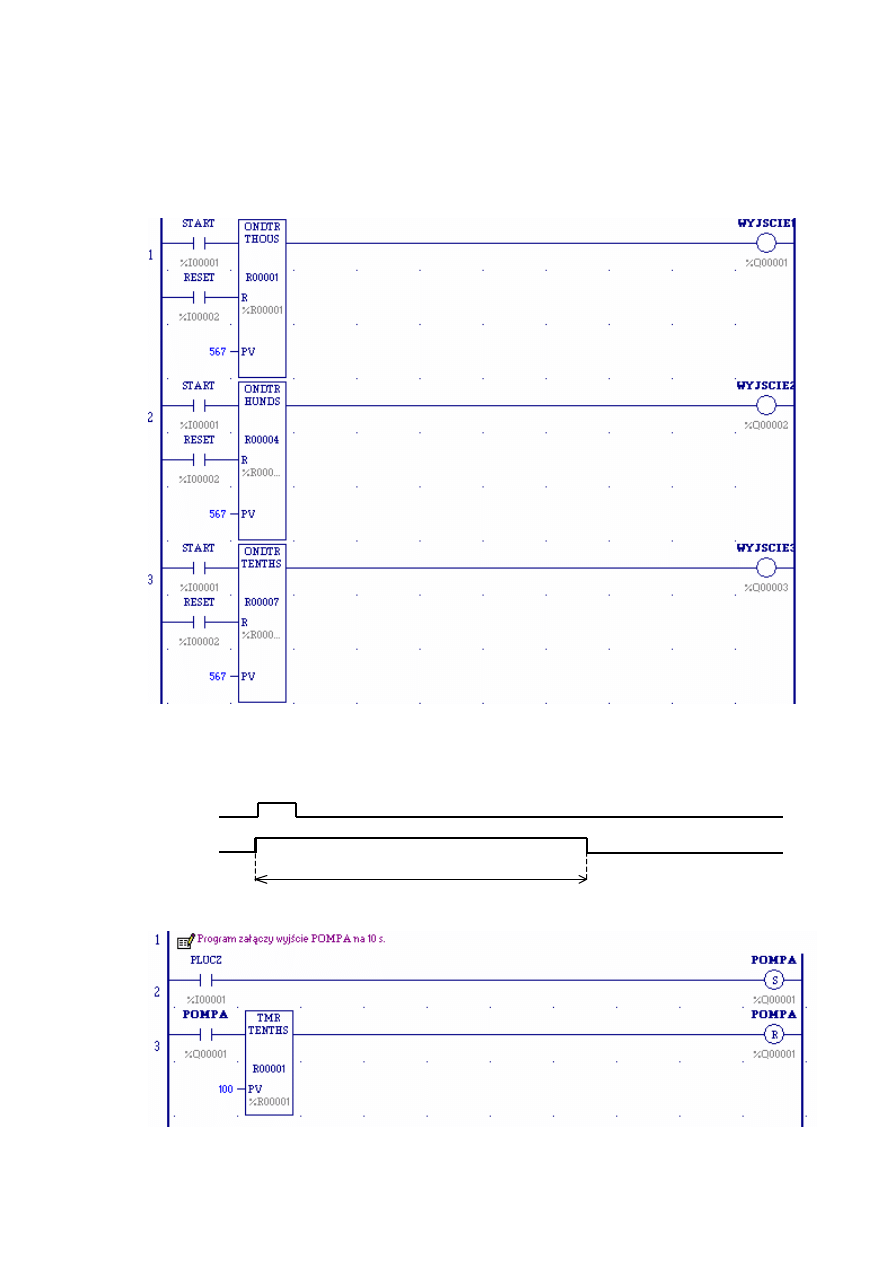
Przykład 1.
Napisa
ć
program, w którym b
ę
d
ą
3 timery z wej
ś
ciem resetuj
ą
cym, ka
ż
dy odmierza inny czas zał
ą
czenia
wej
ś
cia o nazwie START:
−
pierwszy timer ma odmierza
ć
czas 0,567s z rozdzielczo
ś
ci
ą
1 ms i po tym czasie zał
ą
czy
ć
wyj
ś
cie
o nazwie WYJSCIE1,
−
drugi timer ma odmierza
ć
czas 5,67s z rozdzielczo
ś
ci
ą
10 ms, i po tym czasie zał
ą
czy
ć
wyj
ś
cie
o nazwie WYJSCIE2,
−
trzeci timer ma odmierza
ć
czas 56,7s, z rozdzielczo
ś
ci
ą
100 ms i po tym czasie zał
ą
czy
ć
wyj
ś
cie
o nazwie WYJSCIE3.
Wej
ś
cie o nazwie RESET ma powodowa
ć
wyzerowanie wszystkich timer’ów.
WYJSCIE1
WYJSCIE2
WYJSCIE3
Czas [s]
0
0,567
5,67
56,7
Bloki czasowe i liczniki
4
Laboratorium Podstaw Automatyki i Regulacji Automatycznej II
Rozwi
ą
zanie:
Do rozwi
ą
zania zadania wykorzystano nast
ę
puj
ą
ce bloki funkcyjne:
−
ONDTR_THOUS (zlicza czas z rozdzielczo
ś
ci
ą
tysi
ę
cznych cz
ęś
ci sekundy),
−
ONDTR_HUNDS (zlicza czas z rozdzielczo
ś
ci
ą
setnych cz
ęś
ci sekundy),
−
ONDTR_TENTHS (zlicza czas z rozdzielczo
ś
ci
ą
dziesi
ą
tych cz
ęś
ci sekundy).
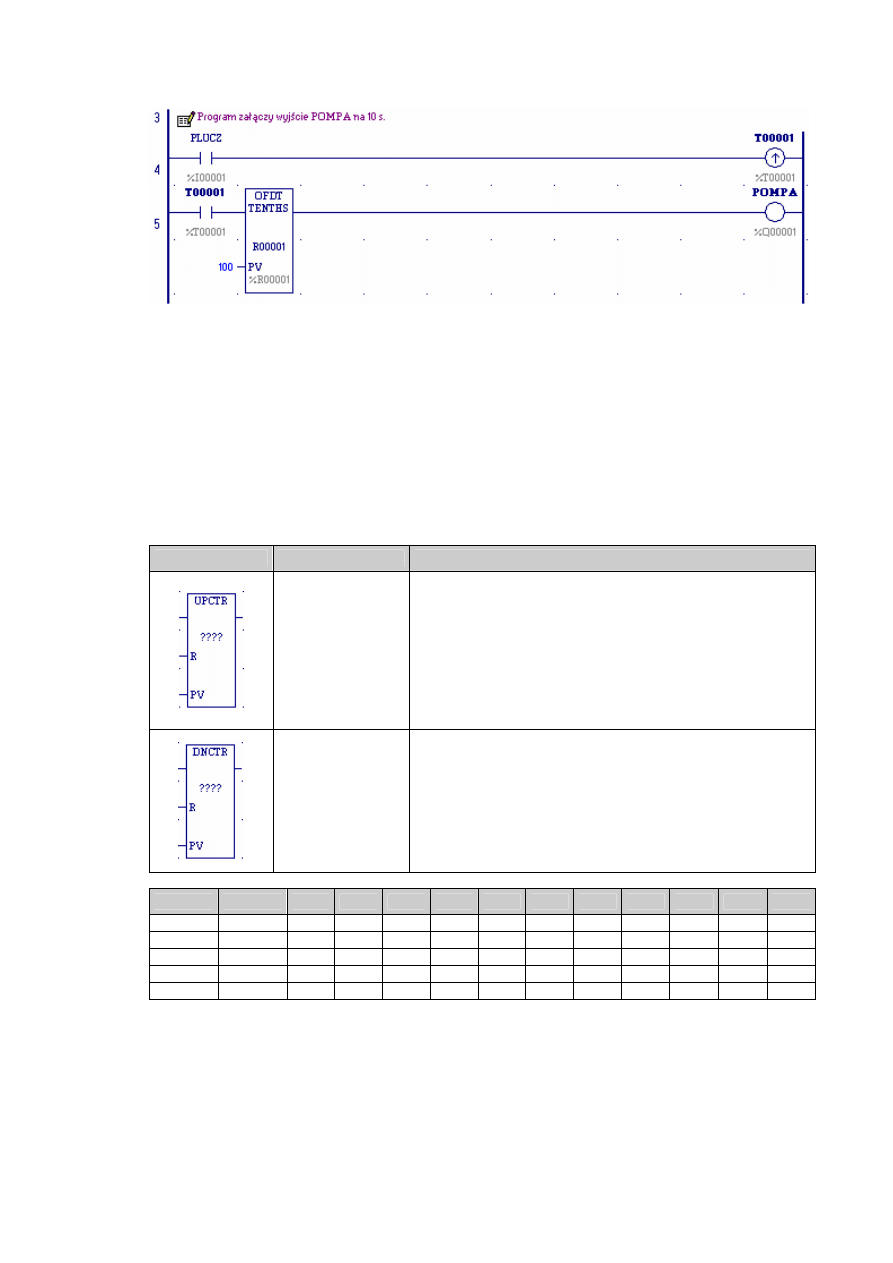
Przykład 2.
Po naci
ś
ni
ę
ciu niestabilnego przycisku PLUCZ, uruchamiana jest pompa powoduj
ą
ca przepłukanie instalacji.
Prac
ą
pompy steruje wyj
ś
cie dwustanowe o nazwie POMPA. Płukanie powinno trwa
ć
10 s, po czym pompa
powinna samoczynnie si
ę
wył
ą
czy
ć
.
PLUCZ
POMPA
10 s
Rozwi
ą
zanie I
Bloki czasowe i liczniki
Laboratorium Podstaw Automatyki i Regulacji Automatycznej II
5
Rozwi
ą
zanie II
BLOKI LICZNIKÓW
Bloki z grupy COUNTERS słu
żą
do zliczania zboczy narastaj
ą
cych impulsów podawanych na wej
ś
cie Enable.
UPCTR - realizuje zliczanie impulsów do zadanej warto
ś
ci; po odliczeniu zadanej warto
ś
ci impulsów
zostaje wysłany sygnał na wyj
ś
cie bloku; blok posiada wej
ś
cie zeruj
ą
ce.
DNCTR - realizuje zliczanie impulsów od zadanej warto
ś
ci do zera; po odliczeniu zadanej warto
ś
ci
impulsów (po osi
ą
gni
ę
ciu przez licznik warto
ś
ci 0) zostaje wysłany sygnał na wyj
ś
cie bloku; podanie
jedynki na wej
ś
cie R bloku powoduje wpisanie do licznika warto
ś
ci zadanej.
Liczniki posiadaj
ą
address - dla danego bloku nale
ż
y zarezerwowa
ć
3 rejestry. W pierwszym z nich
przechowywana jest warto
ść
bie
żą
ca zliczanych impulsów (CV), w drugim warto
ść
zadana (PV), a w trzecim
status.
Blok funkcyjny Typ argumentów
Opis
R: BOOL
PV: INT
address: 3 WORD
Licznik zliczaj
ą
cy w gór
ę
.
Podanie zbocza narastaj
ą
cego na wej
ś
cie Enable powoduje
zwi
ę
kszenie warto
ś
ci CV. Gdy warto
ść
CV osi
ą
gnie PV, to zostaje
wystawiona jedynka na wyj
ś
ciu Q. Gdy przyjd
ą
nast
ę
pne impulsy
na wej
ś
cie Enable, licznik liczy dalej, a
ż
do osi
ą
gni
ę
cia
maksymalnej warto
ś
ci INT.
Podanie jedynki na wej
ś
cie R powoduje wyzerowanie warto
ś
ci CV
oraz wyzerowanie wyj
ś
cia Q, bo stan na wyj
ś
ciu Q jest wynikiem
porównania CV z PV - je
ś
li CV
≥
PV, to wyj
ś
cie Q=1.
R: BOOL
PV: INT
address: 3 WORD
Licznik zliczaj
ą
cy w dół.
Podanie zbocza narastaj
ą
cego na wej
ś
cie Enable powoduje
zmniejszenie warto
ś
ci CV. Gdy warto
ść
CV=0, to zostaje
wystawiona jedynka na wyj
ś
ciu Q. Gdy przyjd
ą
nast
ę
pne impulsy
na wej
ś
cie Enable, licznik liczy dalej, a
ż
do osi
ą
gni
ę
cia minimalnej
warto
ś
ci INT.
Podanie jedynki na wej
ś
cie R powoduje ustawienie warto
ś
ci
CV=PV oraz wyzerowanie wyj
ś
cia Q.
Parametr Przepływ
%I
%Q
%M
%T
%S
%G
%R
%AI
%AQ
Stała
Brak
address
•
enable
•
R
•
PV
•
•
•
•
•
•
•
•
•
•
Q
•
•
•
Dozwolony typ parametru.
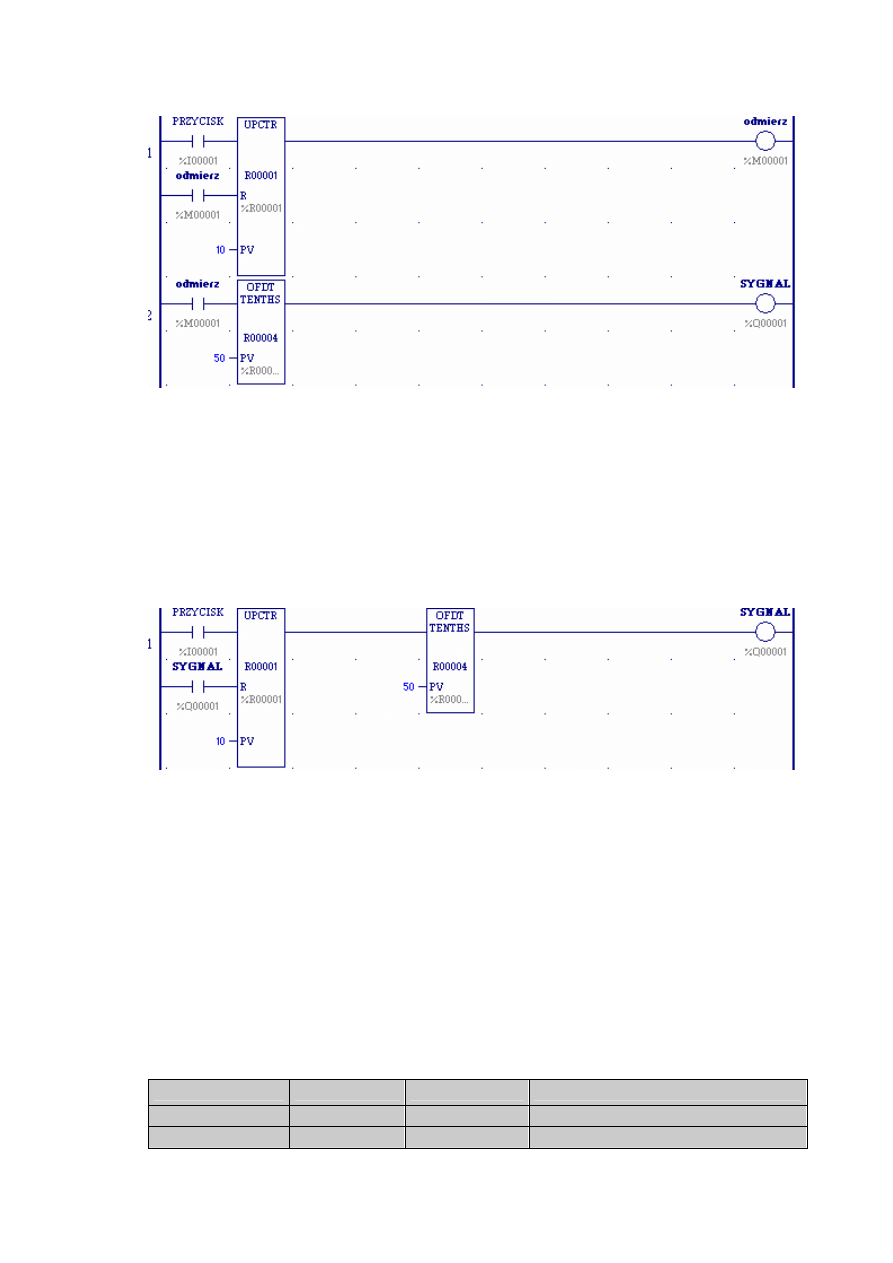
Przykład 3.
Napisa
ć
program, który b
ę
dzie zliczał impulsy na wej
ś
ciu PRZYCISK, po zliczeniu ka
ż
dych 10 impulsów ma
zał
ą
czy
ć
wyj
ś
cie SYGNAL na czas 5 sekund.
Bloki czasowe i liczniki
6
Laboratorium Podstaw Automatyki i Regulacji Automatycznej II
Rozwi
ą
zanie:
Ka
ż
dorazowe zał
ą
czenie wej
ś
cia PRZYCISK powoduje inkrementowanie warto
ś
ci rejestru R00001 przez
licznik UPCTR (w rejestrze tym przechowywana jest ilo
ść
zliczonych impulsów). Po zliczeniu przez licznik
do 10 nast
ę
puje zał
ą
czenie przeka
ź
nika %M00001, co w konsekwencji powoduje wyzerowanie licznika
i zał
ą
czenie przeka
ź
nika czasowego OFDT, który odpowiedzialny jest za zał
ą
czenie wyj
ś
cia SYGNAL na czas
5 sekund.
Przykład 4.
Rozwi
ą
za
ć
poprzednie zadanie dla przypadku, w którym sterownik ma nie reagowa
ć
na impulsy przychodz
ą
ce
na wej
ś
cie PRZYCISK podczas zał
ą
czonego wyj
ś
cia SYGNAL (brak zliczania impulsów podczas zał
ą
czonego
wyj
ś
cia SYGNAL).
Rozwi
ą
zanie:
Program działa podobnie jak w poprzednim przypadku, z t
ą
ró
ż
nic
ą
ż
e sygnał steruj
ą
cy wyj
ś
ciem SYGNAL
został wprowadzony na wej
ś
cie zeruj
ą
ce licznika. Dopóki jest zał
ą
czone wyj
ś
cie SYGNAL, dopóty licznik jest
zerowany - a wi
ę
c nie realizuje zliczania impulsów.
Program
ć
wiczenia:
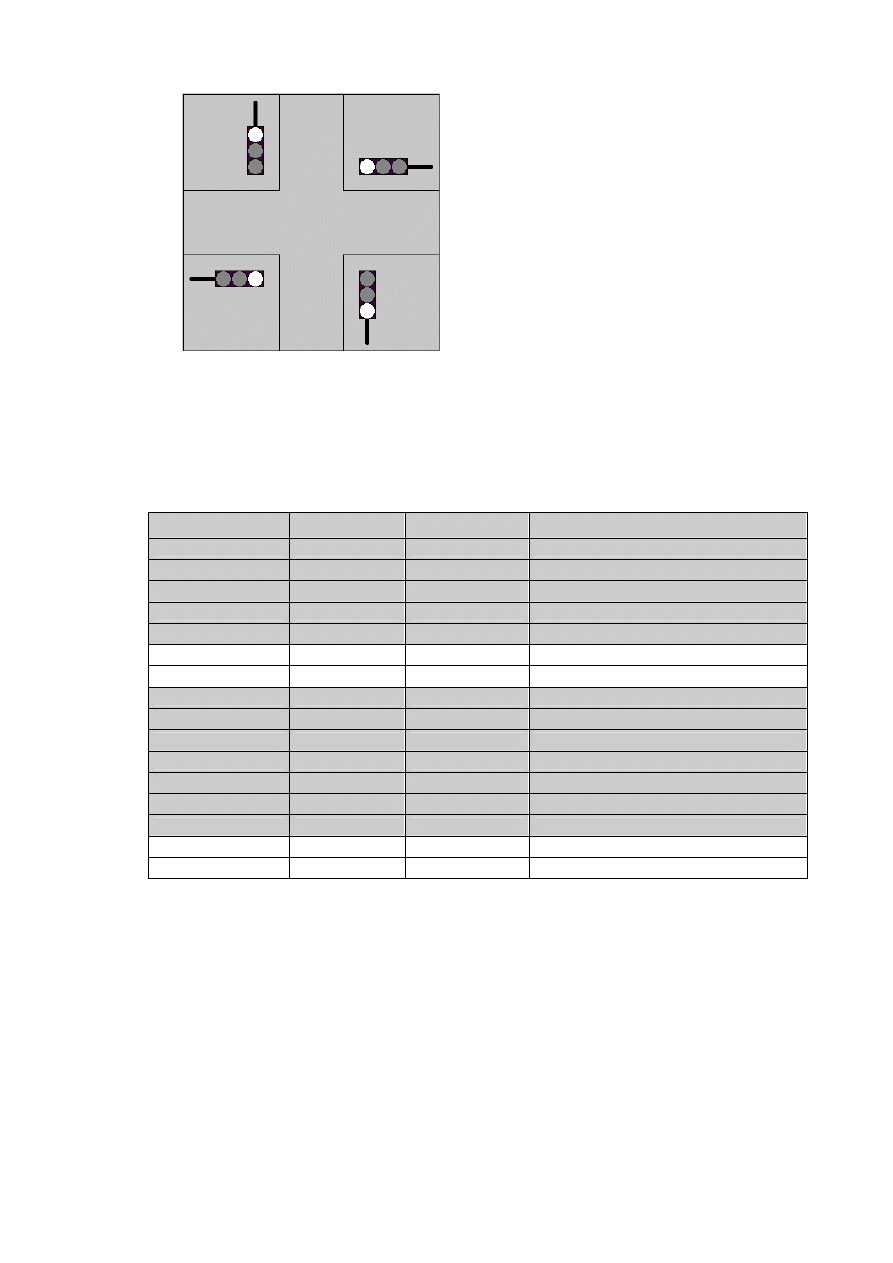
Zad. 1
Zaprojektowa
ć
układ sterowania ruchem manipulatora. List
ę
sygnałów steruj
ą
cych przedstawiono poni
ż
ej.
Nale
ż
y wykorzysta
ć
sygnały zaznaczone w tabeli szarym kolorem. Zakładamy,
ż
e na pocz
ą
tku manipulator
znajduje si
ę
w poło
ż
eniu górnym (KR_G=1). Po naci
ś
ni
ę
ciu niestabilnego przycisku START uruchamiany jest
ruch manipulatora w dół. Po osi
ą
gni
ę
ciu dolnego poło
ż
enia (KR_D=1) manipulator czeka 4 s, po czym
zamyka chwytak (CHWYTAK=1), czeka jeszcze 3 s i wykonuje ruch w gór
ę
. Po osi
ą
gni
ę
ciu górnego
poło
ż
enia (KR_G=1) zwalnia chwytak (CHWYTAK=0). W tym poło
ż
eniu manipulator oczekuje na ponowne
naci
ś
ni
ę
cie przycisku START. Program ma kontrolowa
ć
stan czujników otwarcia i zamkni
ę
cia chwytaka i nie
wykonywa
ć
nast
ę
pnej akcji, dopóki nie dostanie prawidłowego sygnału z czujnika. Zało
ż
y
ć
tablic
ę
podgl
ą
du
stanów zmiennych Data Watch pami
ę
tan
ą
w projekcie i przy jej pomocy przetestowa
ć
program na swoim
stanowisku. Nast
ę
pnie przesła
ć
program do sterownika na stanowisku manipulatora (adres IP:10.10.43.20)
i sprawdzi
ć
na nim działanie programu.
IC200MDD845 slot 1 Adres referencji
Nazwa zmiennej
Opis zmiennej
A1
%Q00001
W_GORE
ruch ramienia w gór
ę
A3
%Q00002
W_DOL
ruch ramienia w dół
Bloki czasowe i liczniki
Laboratorium Podstaw Automatyki i Regulacji Automatycznej II
7
A5
%Q00003
W_PRAWO
ruch ramienia w prawo
A7
%Q00004
W_LEWO
ruch ramienia w lewo
A9
%Q00005
CHWYTAK
zamkni
ę
cie chwytaka
A13
%Q00007
LED_ZIEL
dioda LED zielona
A15
%Q00008
LED_CZ
dioda LED czerwona
B1
%I00001
KR_D
dolny czujnik ko
ń
ca
B2
%I00002
KR_G
górny czujnik ko
ń
ca
B3
%I00003
KR_L
lewy czujnik ko
ń
ca
B4
%I00004
KR_P
prawy czujnik ko
ń
ca
B5
%I00005
KR_O
czujnik otwarcia chwytaka
B6
%I00006
KR_Z
czujnik zamkni
ę
cia chwytaka
B10
%I00010
START
przycisk L1
B11
%I00011
STOP
przycisk L2
B12
%I00012
ZAL
przycisk L3
Zad. 2.
Napisa
ć
program steruj
ą
cy
ś
wiatłami na dwóch sygnalizatorach na skrzy
ż
owaniu. List
ę
sygnałów steruj
ą
cych
modelem skrzy
ż
owania przedstawiono poni
ż
ej.
Do programu steruj
ą
cego
ś
wiatłami dopisa
ć
zliczanie cykli
ś
wiateł – jeden cykl obejmuje 6 faz. Licznik cykli
powinien by
ć
zerowany w pierwszym cyklu programowym sterownika oraz sygnałem z zadajnika
dwustanowego RESET.
Przetestowa
ć
program na swoim stanowisku wykorzystuj
ą
c Data Monitor. Nast
ę
pnie przesła
ć
program do
sterownika na stanowisku modelu skrzy
ż
owania (adres IP:10.10.43.22) i sprawdzi
ć
na nim działanie
programu.
IC200MDD845 slot 1 Adres referencji Nazwa zmiennej
Opis zmiennej
A1
%Q00001
CZER_1
sygnalizator 1.
ś
wiatło czerwone
A3
%Q00002
ZOL_1
sygnalizator 1.
ś
wiatło
ż
ółte
A5
%Q00003
ZIEL_1
sygnalizator 1.
ś
wiatło zielone
A7
%Q00004
CZER_2
sygnalizator 2.
ś
wiatło czerwone
A9
%Q00005
ZOL_2
sygnalizator 2.
ś
wiatło
ż
ółte
A11
%Q00006
ZIEL_2
sygnalizator 2.
ś
wiatło zielone
B1
%I00001
RESET
zerowanie licznika cykli
B2
%I00002
ZAL
zał
ą
czenie sygnalizacji
ś
wietlnej
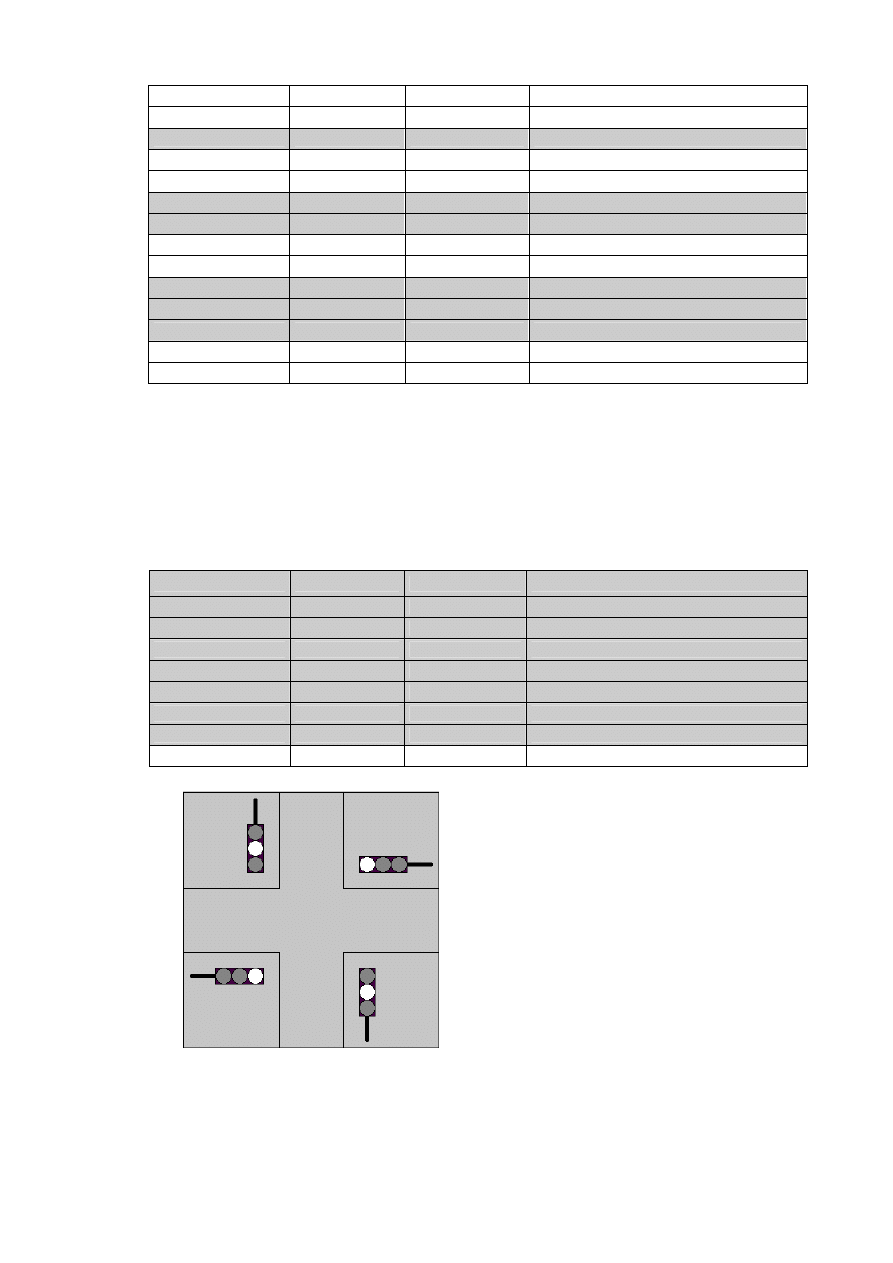
Faza I (5 s):
sygnalizator 1. -
ś
wiatła
ż
ółte,
sygnalizator 2. -
ś
wiatła czerwone.
Bloki czasowe i liczniki
8
Laboratorium Podstaw Automatyki i Regulacji Automatycznej II
Faza II (5 s):
sygnalizator 1. -
ś
wiatła czerwone,
sygnalizator 2. -
ś
wiatła czerwone i
ż
ółte.
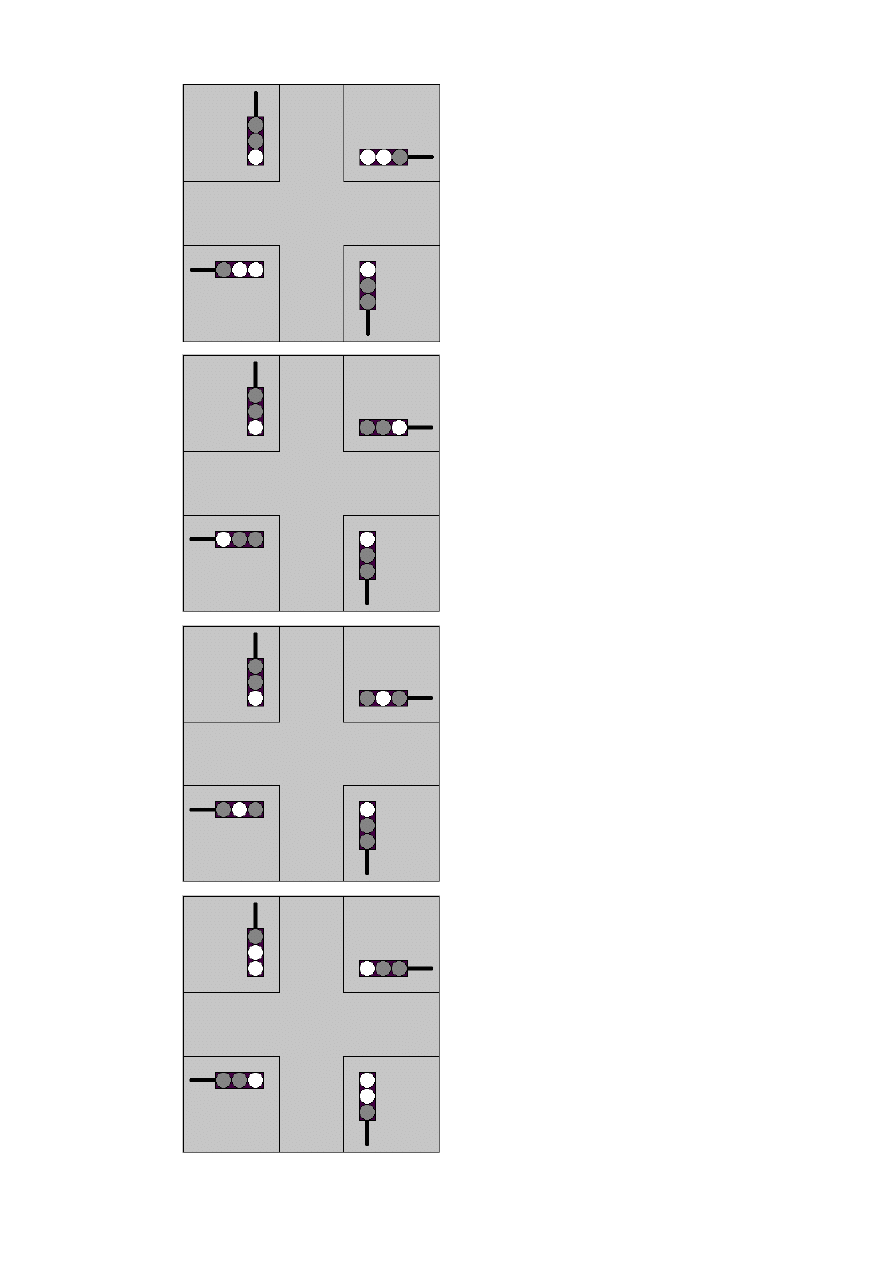
Faza III (30 s):
sygnalizator 1. -
ś
wiatła czerwone,
sygnalizator 2. -
ś
wiatła zielone.
Faza IV (5 s):
sygnalizator 1. -
ś
wiatła czerwone,
sygnalizator 2. -
ś
wiatła
ż
ółte.
Faza V (5 s):
sygnalizator 1. -
ś
wiatła czerwone i
ż
ółte,
sygnalizator 2. -
ś
wiatła czerwone.
Bloki czasowe i liczniki
Laboratorium Podstaw Automatyki i Regulacji Automatycznej II
9
Faza VI (30 s):
sygnalizator 1. -
ś
wiatła zielone,
sygnalizator 2. -
ś
wiatła czerwone.
Zad. dod. 1.
Zaprojektowa
ć
układ sterowania ruchem manipulatora. List
ę
sygnałów steruj
ą
cych przedstawiono poni
ż
ej.
Nale
ż
y wykorzysta
ć
sygnały zaznaczone w tabeli szarym kolorem. Zakładamy,
ż
e na pocz
ą
tku manipulator
znajduje si
ę
w poło
ż
eniu dolnym prawym (KR_D=1, KR_P=1). Po naci
ś
ni
ę
ciu niestabilnego przycisku START
uruchamiany jest ruch manipulatora: w gór
ę
, w lewo, w dół. W lewym dolnym poło
ż
eniu (KR_D=1, KR_L=1)
manipulator czeka 4 s, po czym zamyka chwytak (CHWYTAK=1), czeka jeszcze 3 s i wykonuje ruch w gór
ę
,
w prawo, w dół. Po osi
ą
gni
ę
ciu prawego dolnego poło
ż
enia, manipulator czeka 4 s, po czym zwalnia chwytak
(CHWYTAK=0) i oczekuje na ponowne naci
ś
ni
ę
cie przycisku START.
IC200MDD845 slot 1 Adres referencji
Nazwa zmiennej
Opis zmiennej
A1
%Q00001
W_GORE
ruch ramienia w gór
ę
A3
%Q00002
W_DOL
ruch ramienia w dół
A5
%Q00003
W_PRAWO
ruch ramienia w prawo
A7
%Q00004
W_LEWO
ruch ramienia w lewo
A9
%Q00005
CHWYTAK
zamkni
ę
cie chwytaka
A13
%Q00007
LED_ZIEL
dioda LED zielona
A15
%Q00008
LED_CZ
dioda LED czerwona
B1
%I00001
KR_D
dolny czujnik ko
ń
ca
B2
%I00002
KR_G
górny czujnik ko
ń
ca
B3
%I00003
KR_L
lewy czujnik ko
ń
ca
B4
%I00004
KR_P
prawy czujnik ko
ń
ca
B5
%I00005
KR_O
czujnik otwarcia chwytaka
B6
%I00006
KR_Z
czujnik zamkni
ę
cia chwytaka
B10
%I00010
START
przycisk L1
B11
%I00011
STOP
przycisk L2
B12
%I00012
ZAL
przycisk L3
Zad. dod. 2.
Program steruj
ą
cy
ś
wiatłami na skrzy
ż
owaniu z zad. 2. uzupełni
ć
o obsług
ę
wył
ą
cznika ZAL. Je
ś
li wył
ą
cznik
ś
wiateł ZAL=0, to mrugaj
ą
ś
wiatła
ż
ółte. Je
ś
li wył
ą
cznik
ś
wiateł ZAL=1, to wł
ą
czaj
ą
si
ę
kolejne fazy steruj
ą
ce
ruchem na skrzy
ż
owaniu, zaczynaj
ą
c od fazy I.
Bloki czasowe i liczniki
10
Laboratorium Podstaw Automatyki i Regulacji Automatycznej II
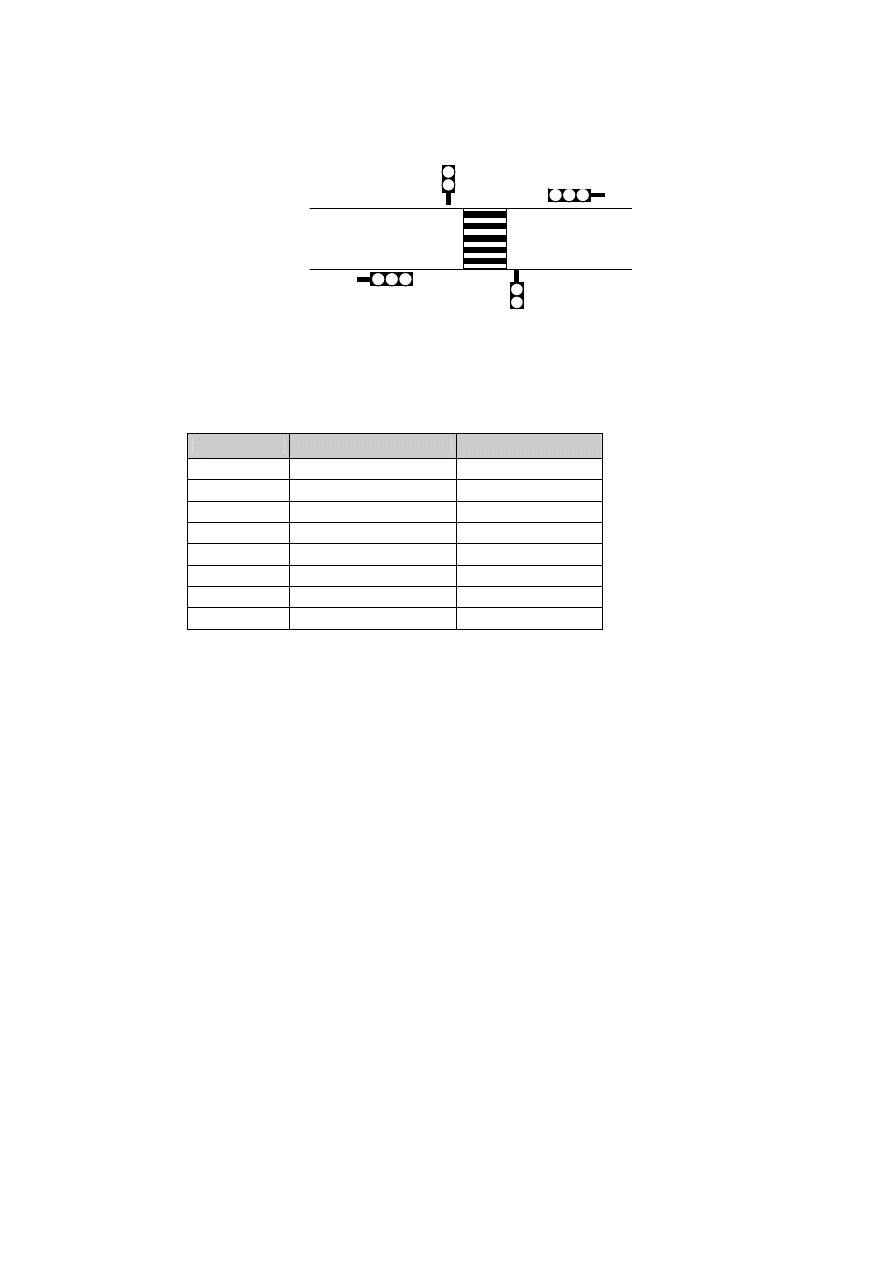
Zad. dod. 3.
Napisz program steruj
ą
cy
ś
wiatłami na przej
ś
ciu dla pieszych.
CZERWONY2
ZIELONY2
CZERWONY1
ZOLTY1
ZIELONY1
CZERWONY1
ZOLTY1
ZIELONY1
CZERWONY2
ZIELONY2
Sygnalizator dla pieszych posiada przycisk niestabilny powoduj
ą
cy natychmiastow
ą
zmian
ę
ś
wiateł dla
kierowców z ZIELONY1 na ZOLTY1.
Proponowane czasy trwania kolejnych faz
ś
wiateł wynosz
ą
:
Faza
ś
wiateł
Sygnalizator 1
Sygnalizator 2
Przycisk PIESI
ZIELONY1
CZERWONY2
8 s
ZOLTY1
CZERWONY2
5 s
CZERWONY1
CZERWONY2
20 s
CZERWONY1
ZIELONY2
8 s
CZERWONY1
ZIELONY2 mruga
5 s
CZERWONY1
CZERWONY2
8 s
CZERWONY1 + ZOLTY1
CZERWONY2
ZIELONY1
CZERWONY2
Zad. dod. 4.
Zaprojektowa
ć
układ sterowania d
ź
wigiem pi
ę
ciopoziomowym. List
ę
sygnałów steruj
ą
cych modelem d
ź
wigu
przedstawiono w zad. dod. 2. w instrukcji do laboratorium nr 3. Nale
ż
y wykorzysta
ć
sygnały zaznaczone
w tabeli szarym kolorem. Naci
ś
ni
ę
cie przycisku przywołanie powoduje uruchomienie szybkiego ruchu kabiny
(SZYBKO=1). Je
ś
li kabina doje
ż
d
ż
a na
żą
dany poziom, czyli gdy zadziałał czujnik CZUJ_i_5 (i=0, 1, 2, 3, 4),
to nale
ż
y zmniejszy
ć
szybko
ść
ruchu (WOLNO=1). Przyciski przywołania powinny by
ć
pod
ś
wietlane do
momentu dojechania kabiny na
żą
dany poziom. Przywołanie podczas ruchu w przeciwnym kierunku nie
powinno zatrzymywa
ć
ruchu kabiny. Przywołanie podczas ruchu w
żą
danym kierunku powinno zatrzyma
ć
kabin
ę
, o ile kabina nie min
ę
ła ju
ż
żą
danego poziomu. Je
ś
li zostało naci
ś
ni
ę
tych wi
ę
cej przycisków przywoła
ń
,
to kabina po dojechaniu na
żą
dany poziom powinna si
ę
zatrzyma
ć
na 10 s, po czym jecha
ć
na nast
ę
pny
żą
dany poziom.
Zad. dod. 5.
Zaprojektowa
ć
układ automatycznego sterowania ruchem wózka. Wózek je
ź
dzi w dwie strony sterowany
wyj
ś
ciami dwustanowymi WOZEK_W_PRAWO i WOZEK_W_LEWO. Ruch w prawo ma trwa
ć
15 s, a ruch
w lewo równie
ż
15 s.
Pierwsze naci
ś
ni
ę
cie niestabilnego przycisku START uruchamia ruch wózka w prawo. Od tego momentu
wózek b
ę
dzie je
ź
dzi
ć
w prawo i w lewo, a
ż
do naci
ś
ni
ę
cia rozwiernego przycisku STOP. Je
ś
li wózek został
zatrzymany podczas ruchu w lewo, po ponownym uruchomieniu wózka przez naci
ś
ni
ę
cie przycisku START
kontynuowany jest ruch wózka w lewo, który ma trwa
ć
przez taki czas, jaki mu został do doko
ń
czenia ruchu w
lewo. Analogicznie w przypadku zatrzymania wózka podczas ruchu w prawo, ponowne uruchomienie wózka
przez przycisk START ma powodowa
ć
kontynuacj
ę
ruchu w prawo.
Je
ż
eli zostanie wył
ą
czone zasilanie sterownika, to po pojawieniu si
ę
napi
ę
cia wózek ma kontynuowa
ć
rozpocz
ę
ty ruch dopiero po naci
ś
ni
ę
ciu przycisku START.
Bloki czasowe i liczniki
Laboratorium Podstaw Automatyki i Regulacji Automatycznej II
11
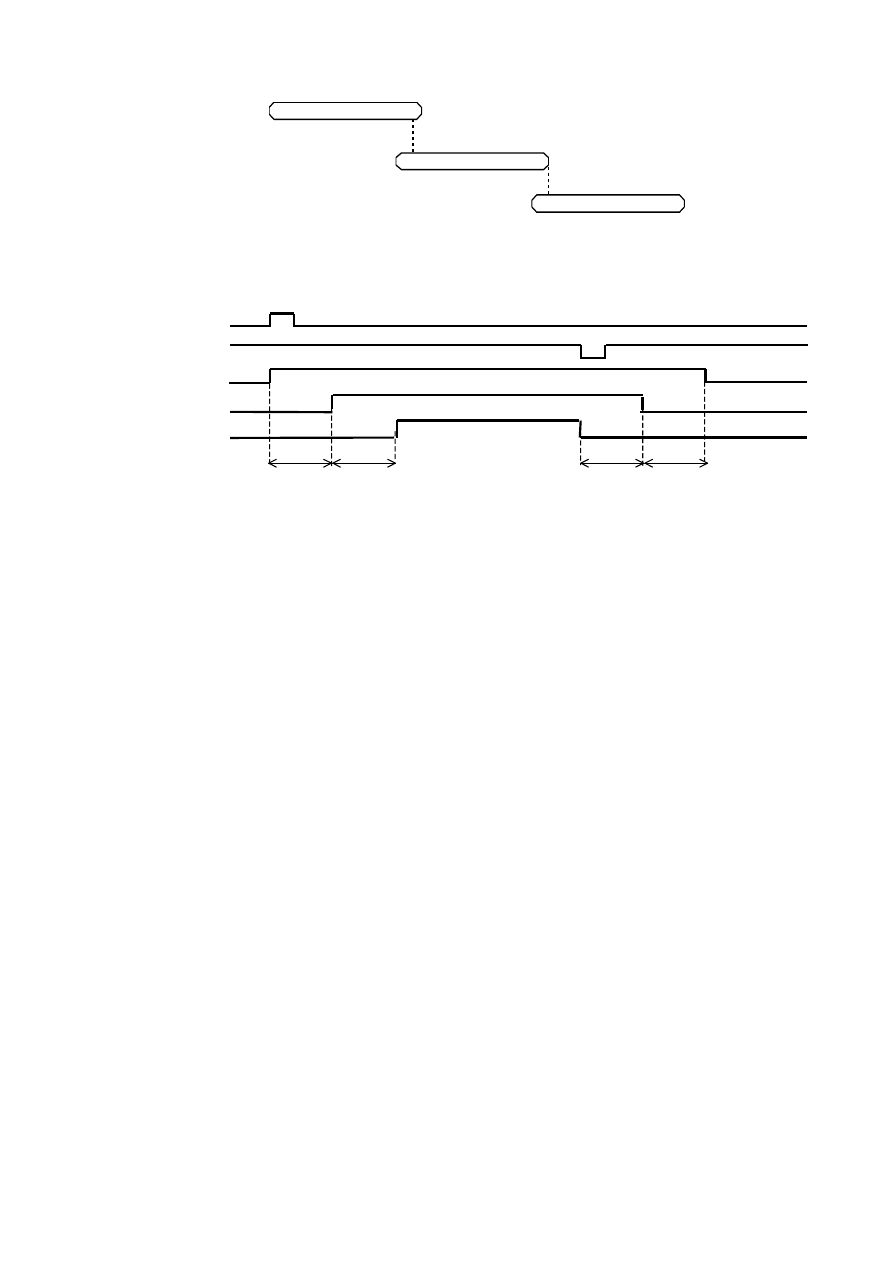
Zad. dod. 6.
TASMA2
TASMA3
TASMA1
Niestabilny przycisk START uruchamia przeno
ś
nik ta
ś
mowy o nazwie TASMA1. Po 6 s od uruchomienia
pierwszego przeno
ś
nika startuje TASMA2, a po nast
ę
pnych 6 s startuje TASMA3. Rozwierny niestabilny
przycisk STOP zatrzymuje przeno
ś
nik ta
ś
mowy TASMA3, po 6 s zatrzymuje si
ę
TASMA2, a po nast
ę
pnych
6 s zatrzymuje si
ę
TASMA1. Napisa
ć
program sterowania przeno
ś
nikami ta
ś
mowymi.
START
TASMA1
TASMA2
6 s
6 s
TASMA3
STOP
6 s
6 s
Zad. dod. 7.
Napisz program steruj
ą
cy dla PLC powoduj
ą
cy generowanie na wyj
ś
ciu dwustanowym o nazwie GNRT
przebiegu prostok
ą
tnego o czasie trwania jedynki podanym w sekundach w rejestrze CZAS_1 i czasie trwania
zera podanym w sekundach w rejestrze CZAS_0.
Wymagana wiedza:
-
działanie bloków funkcyjnych z grupy Timers i Counters,
-
metody programowania sterowników PLC (norma IEC61131-3) – j
ę
zyk stykowo-przeka
ź
nikowy,
-
podstawy obsługi oprogramowania narz
ę
dziowego Proficy ME Logic Developer PLC.
Warunek zaliczenia:
-
obecno
ść
na zaj
ę
ciach,
-
wykazanie si
ę
wymagan
ą
wiedz
ą
w trakcie
ć
wicze
ń
,
-
wykonanie zada
ń
według instrukcji. Ka
ż
dy program powinien znajdowa
ć
si
ę
w oddzielnym projekcie
o nazwie: T4_X_ZZ (X – nr zadania, ZZ – nr sekcji). Wszystkie projekty powinny zawiera
ć
konfiguracj
ę
zgodn
ą
ze sprz
ę
tem znajduj
ą
cym si
ę
na stanowisku, nazwy zmiennych zgodne z tre
ś
ci
ą
zadania
i komentarze. Konfiguracja sterownika powinna posiada
ć
adresy referencji dwustanowych zaczynaj
ą
ce
si
ę
od numeru referencji wyliczanego ze wzoru:
nr sekcji * 8 – 7
oraz adresy referencji analogowych zaczynaj
ą
ce si
ę
od numeru sekcji. W komentarzu powinny znale
źć
si
ę
nazwiska członków sekcji oraz opis programu.
-
przesłanie backup’ow projektów w systemie e-learning’u w terminie 2 tygodni od daty zako
ń
czenia
ć
wiczenia
-
pozytywne zaliczenie projektów,
-
uzyskanie pozytywnej oceny z ustnej lub pisemnej odpowiedzi na pytania kontrolne.
-
zadania dodatkowe nale
ż
y przysyła
ć
w systemie e-learning’u w projektach o nazwach T4_X_nazwisko.
Nie s
ą
one wymagane do zaliczenia, natomiast prawidłowo rozwi
ą
zane przez pierwsz
ą
osob
ę
w grupie s
ą
premiowane ocen
ą
bardzo dobr
ą
.
Termin zło
ż
enia sprawozdania:
-
2 tygodnie od daty
ć
wiczenia
Literatura:
[1] Maczy
ń
ski A. Sterowniki Programowalne PLC. Budowa systemu i podstawy programowania.
Astor, Kraków 2002.
[2] Oprogramowanie Proficy Machine Edition. Logic Developer PLC - pakiet do programowania sterowników
GE Fanuc. Pierwsze kroki. Astor Kraków.
GFK-1918F-PL
[3] Sterowniki serii VersaMax. Podr
ę
cznik u
ż
ytkownika. Astor Kraków 2001.
GFK1503C-PL

Bloki czasowe i liczniki
12
Laboratorium Podstaw Automatyki i Regulacji Automatycznej II
[4] Zbiór zada
ń
dla sterowników GE Fanuc serii 90-30, VersaMax, VersaMax Micro/Nano wraz z przykładami
rozwi
ą
za
ń
. LI-ASK-ZZ-GE3
[5] Legierski T., Kasprzyk J., Wyrwał J., Hajda J., Programowanie sterowników PLC, Wydawnictwo Pracowni
Komputerowej Jacka Skalmierskiego, Gliwice 1998.
Wyszukiwarka
Podobne podstrony:
PAiRAII Instr 2008 lab4
PAiRAII Instr 2008 lab7
PAiRAII Instr 2008 lab5 id 3455 Nieznany
PAiRAII Instr 2008 lab3 id 3455 Nieznany
PAiRAII Instr 2008 lab6a
PAiRAII Instr 2007 lab2 id 3455 Nieznany
PAiRAII Instr 2007 lab1
Arch.Mich.Nowe Instr.I, sztuki plastyczne, Archanioł Michał - Nowe Instrukcje. Przekazy 2008.zbiór
Ubytki,niepr,poch poł(16 01 2008)
2008 XIIbid 26568 ppt
więcej podobnych podstron