
LABORATORIUM
APARATÓW
ELEKTRYCZNYCH
Laboratorium Aparatów Elektrycznych @KEMOR
1
OPRACOWANE ĆWICZENIA:
1. Badanie LOGO!
2. Badanie EASY
3. Badanie stycznika
4. Badanie przekaźnika półprzewodnikowego
5. Badanie bezstykowego regulatora napięcia typu BRN-3a
6. Badanie skuteczności zerowania
Laboratorium Aparatów Elektrycznych @KEMOR
2
SPIS TREŚCI
BADANIE LOGO! .............................................. 7
1. WIADOMOŚCI TEORETYCZNE................................................ 8
1.1. WIDOK LOGO! .......................................................................8
1.2. WERSJE LOGO! .....................................................................9
1.3. WIADOMOŚCI OGÓLNE.....................................................10
1.4. FUNKCJE PODSTAWOWE (GF)........................................10
1.5. FUNKCJE SPECJALNE (SF) ..............................................12
1.6. OPIS FUNKCJI SPECJALNYCH ........................................14
1.6.1. OPÓŹNIONE ZAŁĄCZENIE: ON – DELAY......................14
1.6.2. OPÓŹNIONE WYŁĄCZENIE: OFF – DELAY...................14
1.6.3. PRZEKAŹNIK IMPULSOWY .............................................15
1.6.4. ZEGAR STERUJĄCY ..........................................................15
1.6.5. PRZEKAŹNIK ZATRZASKOWY .......................................17
1.6.6. GENERATOR TAKTU (IMPULSÓW
SYMETRYCZNYCH)...........................................................17
1.6.7. PODTRZYMANE OPÓŹNIENIE ZAŁĄCZENIA...............18
1.6.8. DWUKIERUNKOWY LICZNIK ZDARZEŃ ......................18
1.6.9. LICZNIK CZASU PRACY ...................................................19
1.6.10. PRZEKAŹNIK SAMOKASUJĄCY .....................................20
1.6.11. DETEKTOR CZĘSTOTLIWOŚCI .......................................20
1.7. LISTA ZACISKÓW................................................................21
1.8. BLOKI I ICH NUMERY .......................................................21
1.9. CZTERY ZASADY PRZY PRACY Z LOGO! .......................22
1.10. PRZEGLĄD MENU PROGRAMU .......................................23
1.11. OGRANICZENIA STAWIANE LOGO! ...............................23
1.12. PROGRAM LOGO!SOFT .....................................................23
Laboratorium Aparatów Elektrycznych @KEMOR
3
2. POGRAMY.................................................................................... 25
2.1. ZAŁĄCZENIE SILNIKA NA LEWE – PRAWE
OBROTY.................................................................................25
2.1.1. OBWODY SIŁOWE .............................................................25
2.1.2. OBWODY STEROWANIA ..................................................26
2.1.3. WPISYWANIE PROGRAMU DO LOGO! ..........................27
2.1.4. OPIS DZIAŁANIA................................................................28
2.1.5. PROGRAM W LOGO! .........................................................28
2.2. PRZEŁĄCZNIK „GWIAZDA – TRÓJKĄT ..........................29
2.2.1. OBWODY SIŁOWE .............................................................29
2.2.2. OBWODY STEROWANIA ..................................................30
2.2.3. PROGRAM W LOGO! .........................................................31
2.2.4. SCHEMAT IDEOWY UKŁADU W LOGO!SOFT..............31
2.2.5. OPIS DZIAŁANIA................................................................32
3. STANOWISKO BADAWCZE..................................................... 33
3.1. WYMIARY..............................................................................33
3.2. SYMBOLE..............................................................................33
3.3. OZNACZENIA.......................................................................33
3.4. PŁYTA CZOŁOWA................................................................34
3.5. WYKAZ ELEMENTÓW ........................................................35
4. PROGRAM ĆWICZENIA ........................................................... 35
BADANIE EASY .............................................. 36
1. WIDOK EASY............................................................................... 37
2. TYPY EASY .................................................................................. 37
3. INSTALACJA EASY.................................................................... 38
4. FUNKCJE STEROWNIKA EASY.............................................. 40
4.1. WYKAZ STYKÓW I PRZEKAŹNIKÓW...............................40
Laboratorium Aparatów Elektrycznych @KEMOR
4
4.2. TYPY CEWEK........................................................................40
4.3. PRZEKAŹNIK CZASOWY....................................................41
4.3.1. PRZEKAŹNIK CZASOWY O STAŁYM LUB
LOSOWO ZMIENNYM CZASIE OPÓŹNIONEGO
PRZYCIĄGANIA .................................................................41
4.3.2. PRZEKAŹNIK CZASOWY O STAŁYM LUB
LOSOWO ZMIENNYM CZASIE OPÓŹNIONEGO
ODPADANIA .......................................................................42
4.3.3. PRZEKAŹNIK CZASOWY, IMPULSOWY........................43
4.3.4. PRZEKAŹNIK CZASOWY, MIGAJĄCY ...........................43
4.4. LICZNIK ................................................................................44
4.5. ZEGAR STERUJĄCY............................................................45
4.6. KOMPARATOR ANALOGOWY...........................................46
5. PODSTAWY PROGRAMOWANIA........................................... 46
5.1. NEGACJA ..............................................................................47
5.2. SAMOPODTRZYMANIE......................................................47
5.3. ZESTYK TRWAŁY.................................................................48
5.4. PRZYKŁAD WYKORZYSTANIA PRZEKAŹNIKA
CZASOWEGO........................................................................49
5.5. PRZYKŁAD WYKORZYSTANIA LICZNIKA......................50
5.6. SAMOWYŁĄCZENIE STYCZNIKA.....................................50
BADANIE STYCZNIKA.................................... 51
1. WIADOMOŚCI TEORETYCZNE.............................................. 52
1.1. STYCZNIKI, ZASADA DZIAŁANIA I
ZASTOSOWANIE..................................................................52
1.2. ZASADA DZIAŁANIA ..........................................................52
1.3. ZASTOSOWANIE..................................................................53
Laboratorium Aparatów Elektrycznych @KEMOR
5
1.4. BUDOWA STYCZNIKÓW ....................................................53
1.5. OZNACZENIA STYCZNIKA ................................................55
1.6. PODSTAWOWY UKŁAD ZE STYCZNIKIEM ....................55
2. PROGRAM ĆWICZENIA ........................................................... 56
BADANIE PRZEKAŹNIKA
PÓŁPRZEWODNIKOWEGO ........................... 62
1. WIADOMOŚCI TEORETYCZNE.............................................. 63
1.1. PRZEZNACZENIE PRZEKAŹNIKÓW
PÓŁPRZEWODNIKOWYCH
ZMIENNOPRĄDOWYCH (PPZ)..........................................63
1.2. OPIS KONSTRUKCJI I ZASADY DZIAŁANIA..................63
1.3. ZALEŻNOŚCI OPISUJĄCE PODSTAWOWE
FUNKCJE PRZEKAŹNIKA
PÓŁPRZEWODNIKOWEGO
ZMIENNOPRĄDOWEGO ....................................................66
1.4. PARAMETRY TECHNICZNE PPZ
ZASTOSOWANEGO W ĆWICZENIU .................................66
1.5. CHARAKTERYSTYKI PODAWANE PRZEZ
PRODUCENTA .....................................................................67
1.6. SCHEMAT UKŁADU POMIAROWEGO ............................68
2. PROGRAM ĆWICZENIA ........................................................... 70
BADANIE BEZSTYKOWEGO REGULATORA
NAPIĘCIA TYPU BRN-3A ............................... 75
1. WIADOMOŚCI TEORETYCZNE.............................................. 76
Laboratorium Aparatów Elektrycznych @KEMOR
6
1.2. BUDOWA REGULATORA NAPIĘCIA ...............................77
1.3. ZASADA EKSPLOATACJI REGULATORA
NAPIĘCIA .............................................................................78
1.4. ZASADA DZIAŁANIA REGULATORA NAPIĘCIA...........79
1.5. STANY PRACY REGULATORA NAPIĘCIA ......................81
1.6. ROZRUCH I NORMALNA PRACA REGULATORA
NAPIĘCIA .............................................................................81
1.7. PRACA AWARYJNA REGULATORA NAPIĘCIA .............82
2. STANOWISKO LABORATORYJNE ........................................ 82
2.1. PODSTAWOWE PARAMETRY TECHNICZNE
REGULATORA NAPIĘCIA..................................................82
2.2. STANOWISKO POMIAROWE.............................................83
2.2.1. OBWODY GŁÓWNE ...........................................................83
2.2.2. OBWODY STEROWANIA I SYGNALIZACJI...................84
3. PROGRAM ĆWICZENIA ........................................................... 85
BADANIE SKUTECZNOŚCI ZEROWANIA..... 89
1. WIADOMOŚCI TEORETYCZNE.............................................. 90
1.1. WIADOMOŚCI OGÓLNE.....................................................90
1.2. BADANIE SKUTECZNOŚCI ZEROWANIA
MIERNIKIEM TYPU MOZ ..................................................95
1.2.1. WIADOMOŚCI OGÓLNE O MIERNIKU ...........................95
1.2.2. DANE TECHNICZNE ..........................................................95
1.2.3. ZASADA DZIAŁANIA ........................................................96
1.2.4. DOKŁADNOŚĆ POMIARU.................................................96
1.2.5. OCENA SKUTECZNOŚCI ZEROWANIA..........................99
1.3. POMIAR IMPEDANCJI ZWARCIOWEJ..........................101
2. PROGRAM ĆWICZENIA ......................................................... 104
Laboratorium Aparatów Elektrycznych @KEMOR
7
ĆWICZENIE NR I
BADANIE LOGO!
Laboratorium Aparatów Elektrycznych @KEMOR
8
1. WIADOMOŚCI TEORETYCZNE
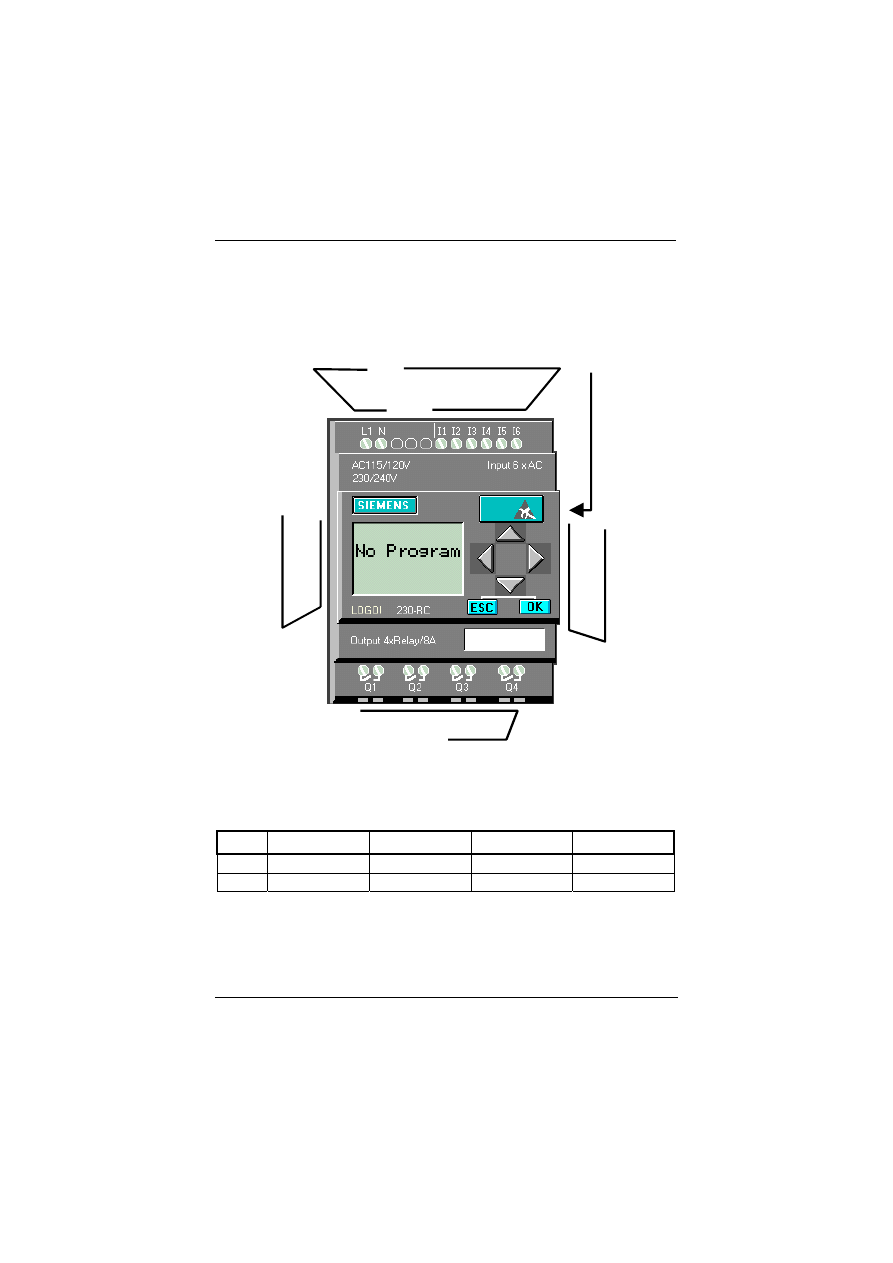
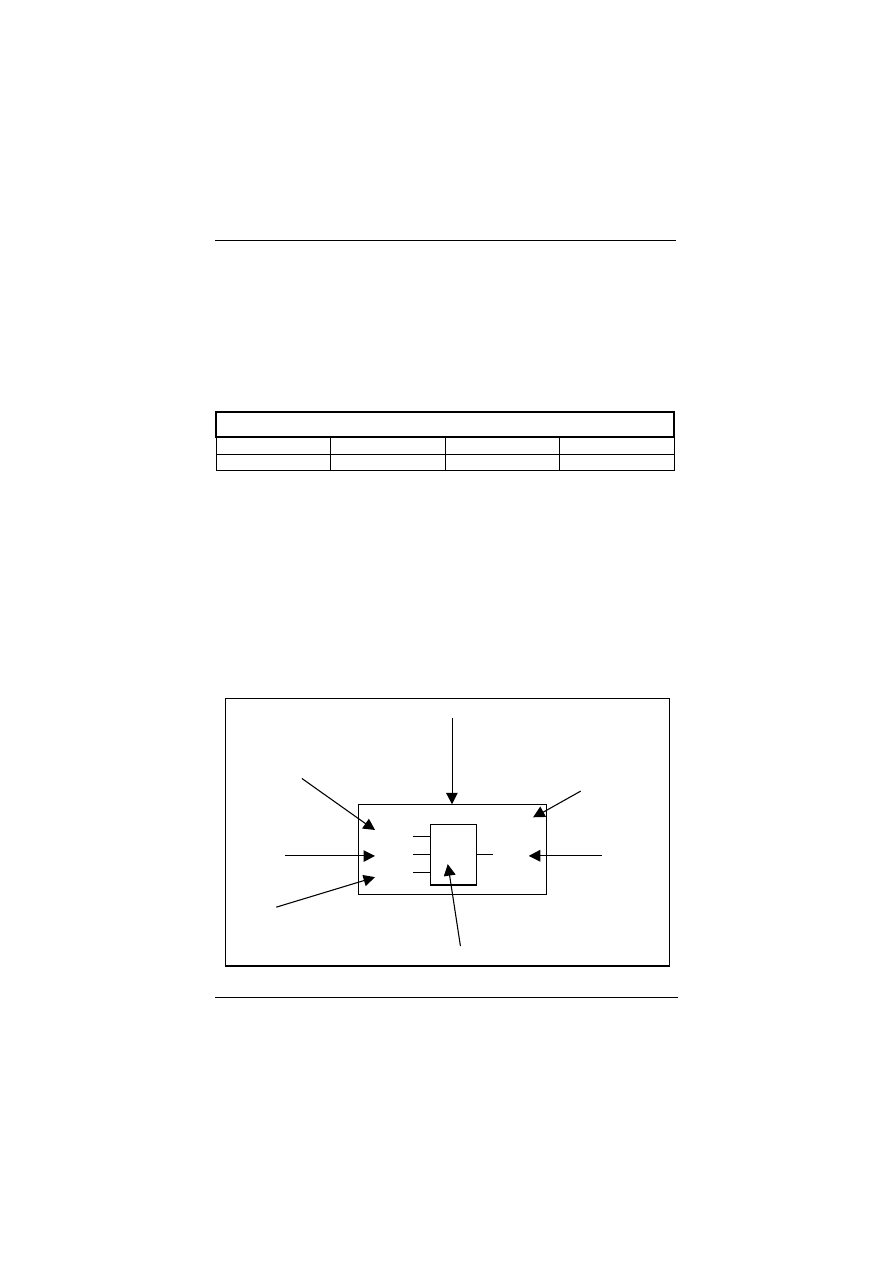
1.1. WIDOK
LOGO!
Zasilanie
Wejścia o napięciu zasilania
G
ni
az
do
do
da
tk
ow
ej
pa
m
ię
ci
or
az
k
abl
a P
C
K
law
is
ze
s
te
ru
ją
ce
W
yś
w
ie
tlac
z L
C
D
Wyjścia
Moduł LOGO! zasila się napięciem 230V prądu przemiennego lub
24V prądu stałego w zależności od typu (patrz dalej). Na wejścia podaje się
więc napięcie zasilania:
STAN
LOGO! 230..
LOGO! 230L..
LOGO! 24..
LOGO! 24..L..
0
< 40V AC
< 40V AC
< 5V DC
< 5V DC
1
> 79V AC
> 79V AC
> 15V DC
> 12V DC
Zmiana stanu z 0 na 1 lub z 1 na 0 musi się przynajmniej utrzymać
50ms aby LOGO! to rozpoznał.
Wyjścia LOGO! reprezentują zestyki przekaźników.
Laboratorium Aparatów Elektrycznych @KEMOR
9
1.2. WERSJE
LOGO!
Wersja LOGO
Oznaczeni
e
Wej
ścia
Wyj
ścia
Wym
iary
[mm
]
Ro
zszerzo
n
e
funk
cje
Zegar
Magistrala
Asi
LOGO! 230R
6x230V
4x230V; 8A
72x90x55
LOGO! 230RC
6x230V
4x230V; 8A
72x90x55
x
LOGO! 24R
6x24V
4x230V; 8A
72x90x55
LOGO! 24RC
6x24V
4x230V; 8A
72x90x55
x
STA
NDA
RD
LOGO! 24
6x24V
4x24V; 0,3A*
72x90x55
LOGO! 230RL
12x230V
8x230V; 10A
126x90x55
x
LOGO! 230RCL
12x230V
8x230V; 10A
126x90x55
x
x
LOGO! 24RL
12x24V
8x230V; 10A
126x90x55
x
...L
LOGO! 24L
12x24V
8x24V; 0,3A*
126x90x55
x
LOGO! 230RLB11 12x230V
8x230V; 10A
126x90x55
x
x
LOGO! 24RLB11
12x24V
8x230V; 10A
126x90x55
x
x
...LB11
LOGO! 24LB11
12x24V
8x24V; 0,3A*
126x90x55
x
x
*
Wyjścia tranzystorowe (normalnie: wyjścia przekaźnikowe)
24
Wersja 24V DC
230
Wersja 115/230V AC
R
Wyjście przekaźnikowe
C
Zintegrowany zegar czasu rzeczywistego
L
Podwójna ilość wejść i wyjść oraz rozszerzony zakres funkcjonalny
B11
Złącze magistrali Asi pracujące jako „slave”
Laboratorium Aparatów Elektrycznych @KEMOR
10
1.3. WIADOMOŚCI OGÓLNE
LOGO! to uniwersalny moduł logiczny produkcji firmy Siemens
i jest on programowalnym sterownikiem. Poprzez odpowiednie podanie sy-
gnału sterującego na wejścia I
1
, I
2
... zostają załączone zestyki przekaźników
Q
1
, Q
2
,... (wyjścia). Załączeniem wyjść LOGO! steruje sterownik na pod-
stawie wpisanego programu i zadanych sygnałów wejściowych.
LOGO! zawiera:
•
Sterownik programowalny,
•
Elementy obsługi i wyświetlacz,
•
Zasilacz,
•
Gniazdo pamięci EEPROM i kabla PC,
•
Gotowe do zastosowania funkcje sterownicze często wymagane
w praktyce, takie jak opóźnienie załączenia i wyłączenia oraz prze-
kaźniki impulsowe,
•
Zegar czasu rzeczywistego,
•
Wejścia i wyjścia – zależne od typu.
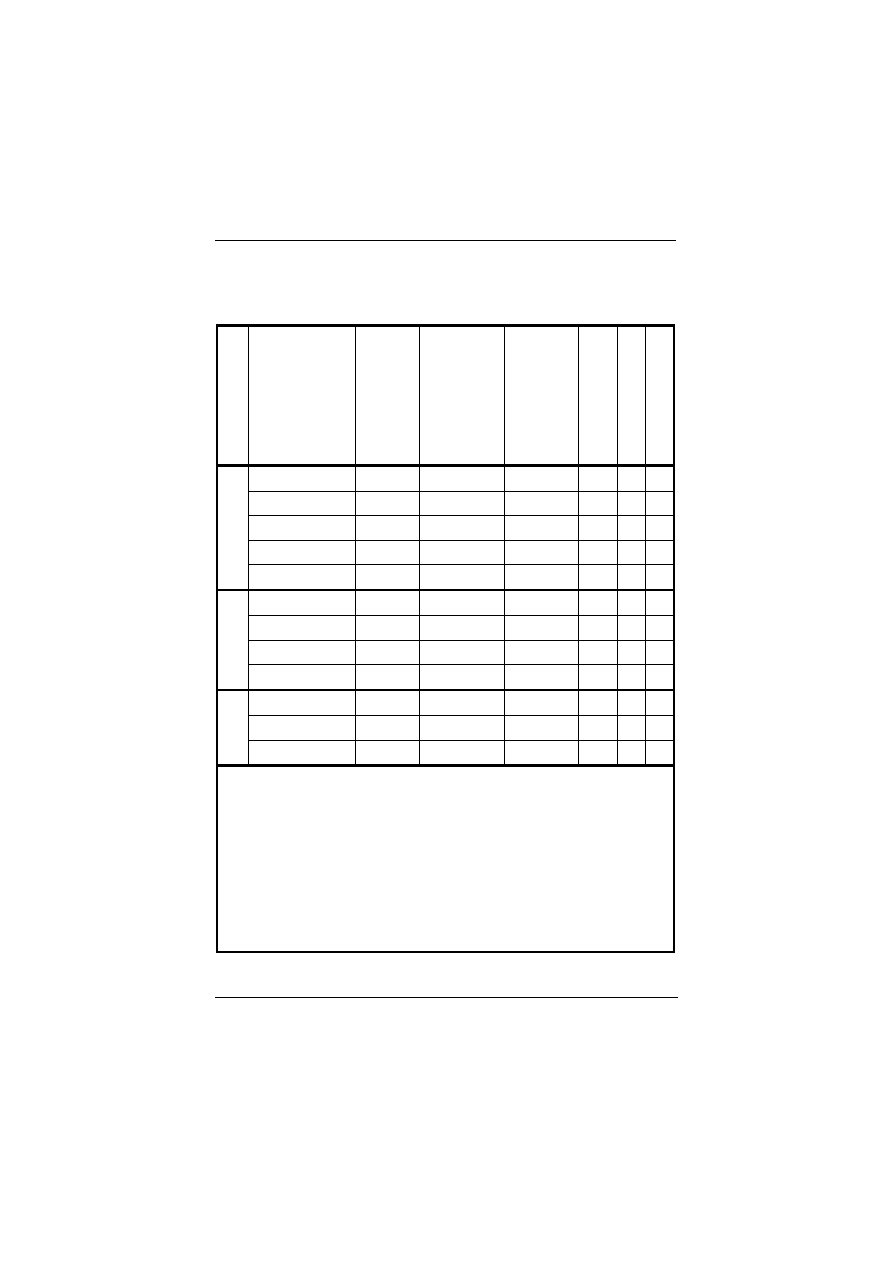
1.4. FUNKCJE PODSTAWOWE (GF)
FUNKCJE PODSTAWOWE (GF)
Funkcja
Reprezentacja schematu ukła-
du i w LOGO
Tablica logiczna (stanów)
I1
I2
I3
Q
0
0
0
0
0
0
1
0
0
1
0
0
0
1
1
0
1
0
0
0
1
0
1
0
1
1
0
0
AND (I)
Iloczyn
logiczny
I3
I2
I1
Q
&
1
1
1
1
x = 1
I1
I2
I3
Q
0
0
0
0
0
0
1
1
0
1
0
1
0
1
1
1
1
0
0
1
1
0
1
1
1
1
0
1
OR (LUB)
Suma
logiczna
I3
I2
I1
Q
≥1
1
1
1
1
x = 0
Laboratorium Aparatów Elektrycznych @KEMOR
11
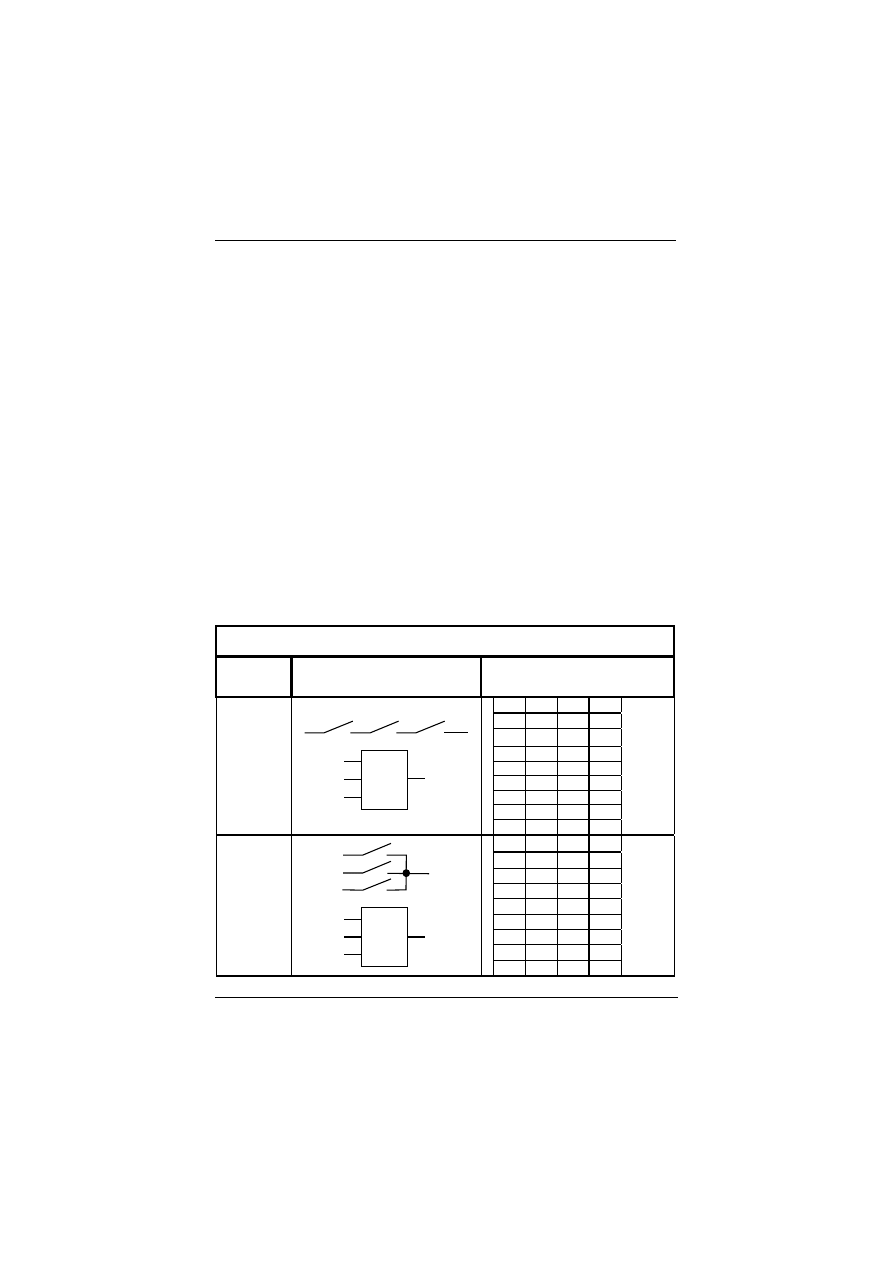
Funkcje podstawowe c.d.
FUNKCJE PODSTAWOWE (GF)
Funkcja
Reprezentacja schematu ukła-
du i w LOGO
Tablica logiczna (stanów)
I1
Q
1
0
0
1
NOT
Negacja
(Inwerter)
I1
Q
1
x = 1
I1
I2
Q
0
0
0
0
1
1
1
0
1
XOR
Różnica
symetrycz-
na
I2
I1
Q
=1
1
1
0
x = 0
I1
I2
I3
Q
0
0
0
1
0
0
1
1
0
1
0
1
0
1
1
1
1
0
0
1
1
0
1
1
1
1
0
1
NAND
(NOT
AND)
Negacja
Iloczynu
logicznego
I3
I2
I1
Q
&
1
1
1
0
x = 1
I1
I2
I3
Q
0
0
0
1
0
0
1
0
0
1
0
0
0
1
1
0
1
0
0
0
1
0
1
0
1
1
0
0
NOR
(NOT OR)
Negacja
sumy
logicznej
I3
I2
I1
Q
≥1
1
1
1
0
x = 0
Laboratorium Aparatów Elektrycznych @KEMOR
12
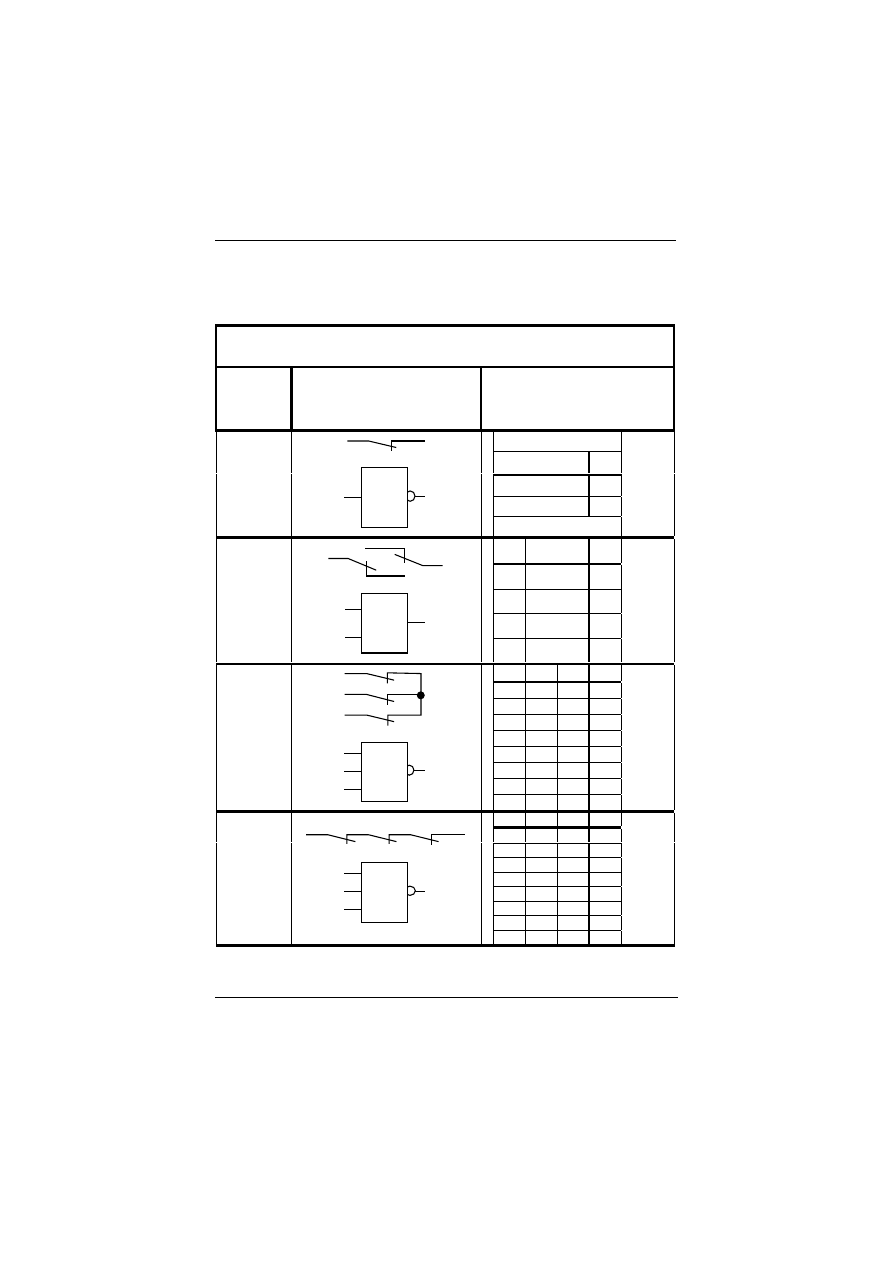
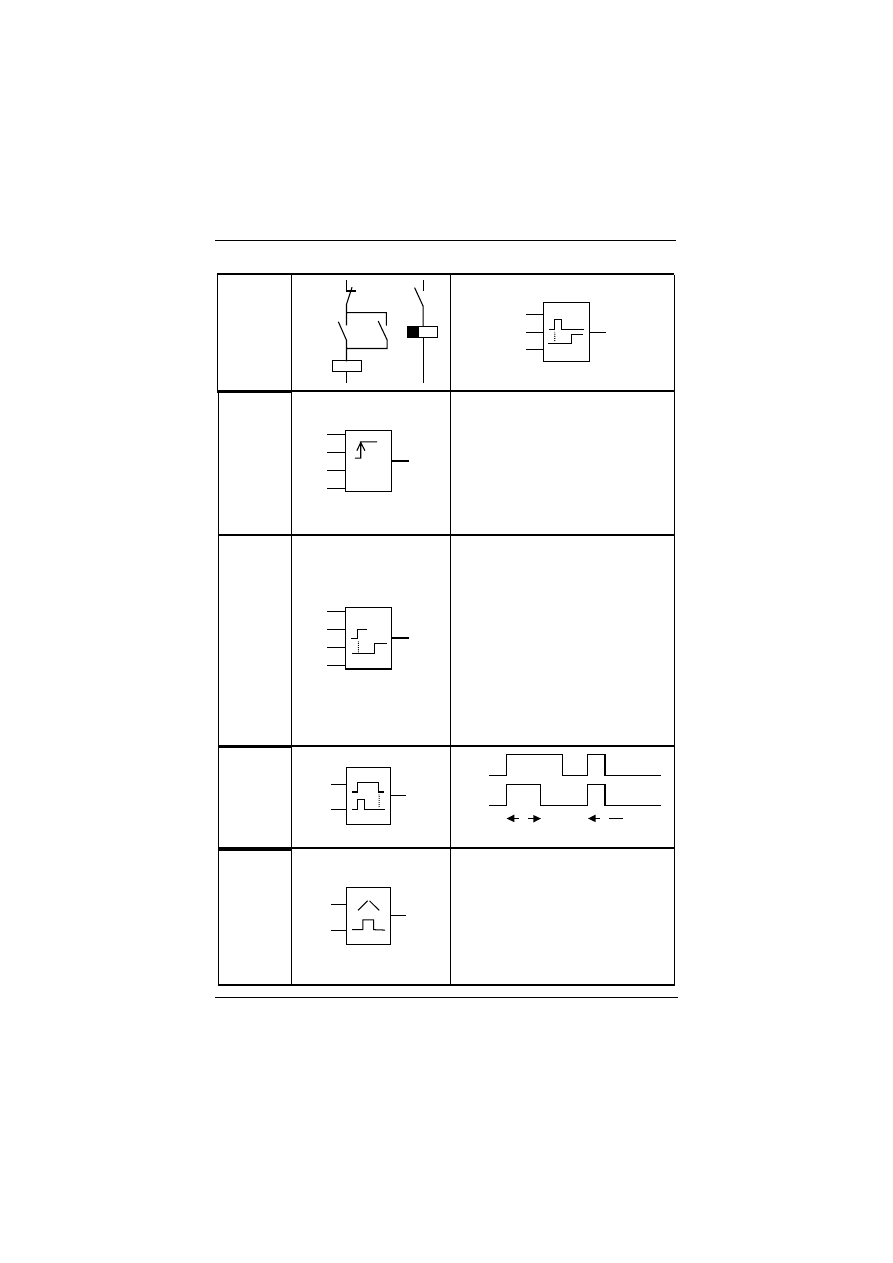
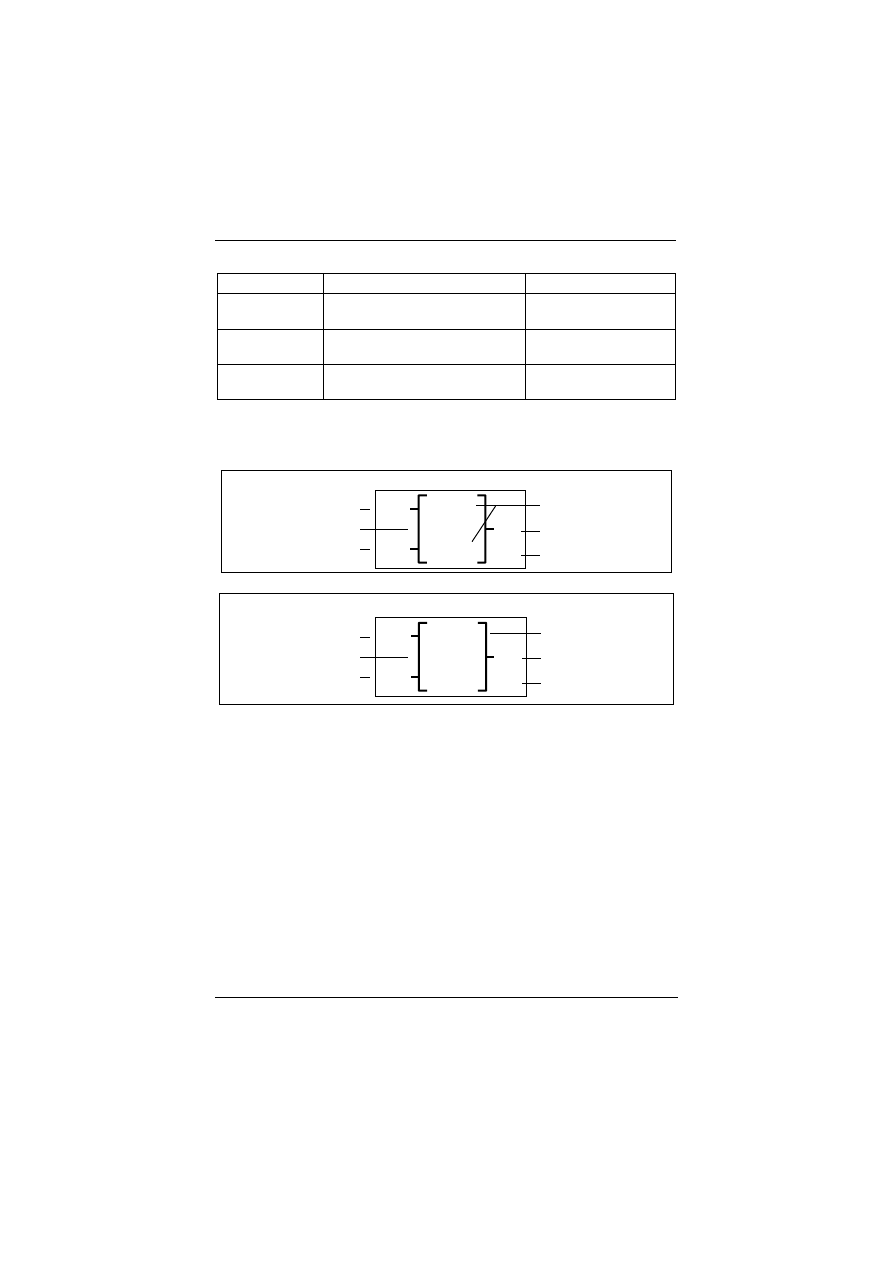
1.5. FUNKCJE SPECJALNE (SF)
FUNKCJE SPECJALNE (SF)
Funkcja
Reprezentacja schema-
tyczna
Reprezentacja
w LOGO
Opóźnione załą-
czenie
T
Trg
Q
Opóźnione wy-
łączenie
T
R
Trg
Q
Przekaźnik im-
pulsowy
Par
R
Trg
Q
(1)
Zegar
sterujący
No3
No2
No1
Q
Przekaźnik
zatrzaskowy
R
S
K1
K1
Par
R
S
Q
RS
(1)
Generator
impulsów
T
En
Q
Laboratorium Aparatów Elektrycznych @KEMOR
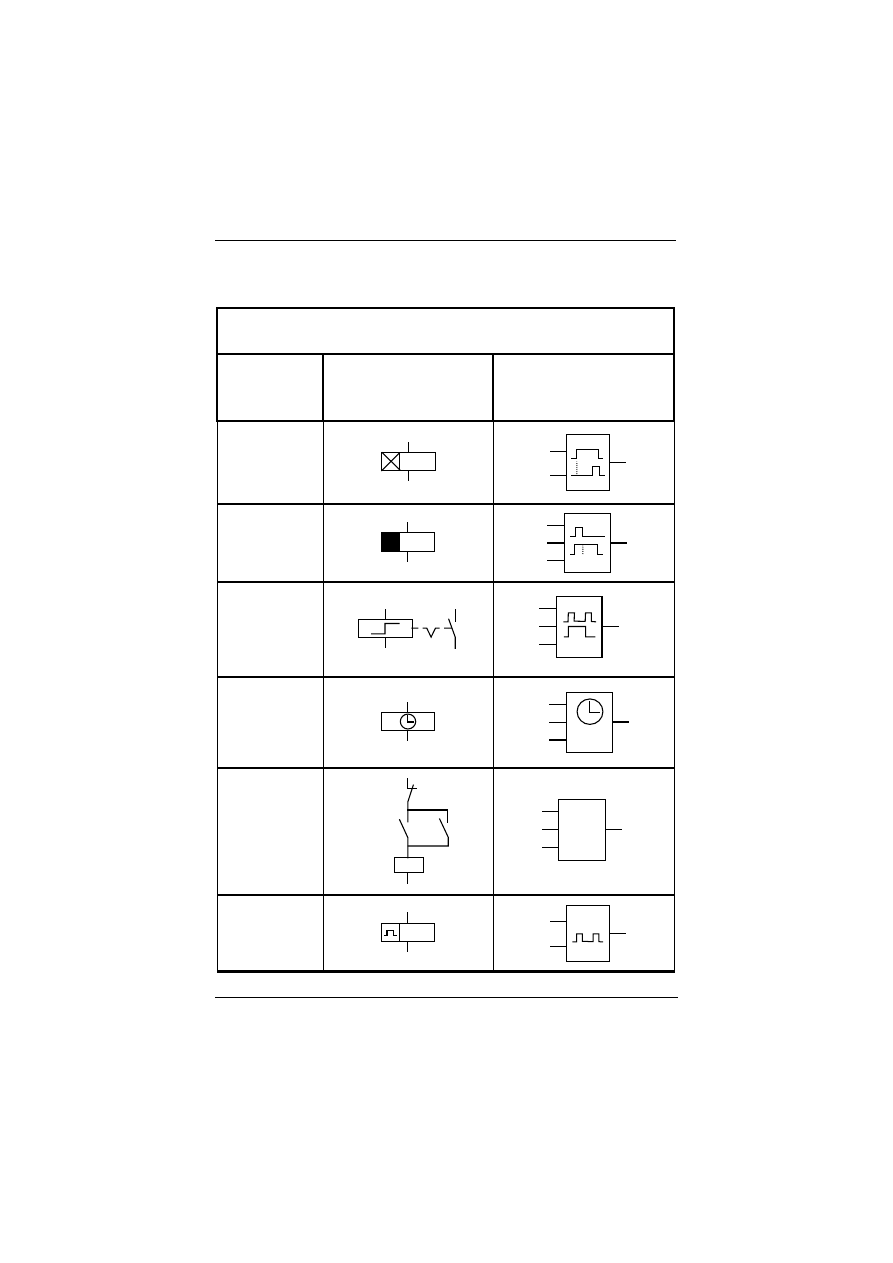
13
Podtrzyma
ne
opóźnienie
załączenia
R
Trg
K1
K1
K1
Q
T
R
Trg
Q
Licznik
dwukie-
runkowy
Dir
Cnt
R
Q
Par
+/
−
(2)
Cnt – Licznik zliczania zmian z 0 na 1
Maksymalna częstotliwość zliczania – 5Hz
Dir = 0 – Zliczanie w górę
Dir = 1 – Zliczanie w dół
Q = 1 jeśli wartość wewnętrzna licznika jest
większa lub równa od Par (Lim)
Par = 0 . . 9999; Lim = 0 . . 999999
Rem:
off – bez podtrzymania
on – stan może być zapamiętany
Licznik
godzin
pracy
Ral
En
R
Q
Par
h
(3)
R=1 – Wstrzymuje licznik czasu pracy OT,
kasuje wyjście Q, MN=MI
En=1 – Pomiar czasu pracy
En=0 – Wstrzymanie pomiaru czasu pracy
Ral=1 (Reset all) – Wyzerowanie Q, OT
i ustawienie MN=MI
MN – Pozostały czas
MI=0 . . 9999 godz. – Przedział czasu ob-
sługi prewencyjnej w [godz]
Q = 1 gdy MN = 0
OT – Cały czas jaki upłynął od ostatniego
stanu 1 na wejściu Ral
Czas nie jest zliczany powyżej OT=99999
godzin
Przekaź-
nik samo-
kasujący /
wyjście
impulsowe
T
Trg
Q
(3)
Q
Trg
T nie upłynął
T
T
Dekoder
Poziomu
(dekoder
częstotli-
wości)
Par
Fre
Q
(3)
Fre – Podawane impulsy, które są zliczane
SW
↑ - Poziom załączenia (suma impulsów)
SW
↓ - Poziom wyłączenia (suma impul-
sów)
G_T = 00.05 . . 99.95 – Przedział czasu zli-
czania impulsów podawane na Fre
Jeśli czas G_T wynosi 1s, to parametr Ilość
określa częstotliwość sygnału wejściowego
w [[Hz]
Laboratorium Aparatów Elektrycznych @KEMOR
14
OZNACZENIA:
Trg –
sygnał sterujący (0 lub 1)
R
– (reset) bezwarunkowy stan 0 na wyjściu bloku
(1)
–
Parametr Par jest tylko dostępny w LOGO! ...L...
(2)
–
W LOGO! ... jest 4 cyfry, natomiast w LOGO! ...L... jest 6 cyfr
(3)
–
Funkcje dostępne tylko w LOGO! ...L...
+ LUB – WYSTĘPUJĄCY PRZY WARTOŚCI PARAMETRU
+
Parametr może być zmieniany podczas pracy.
−
Parametr może być zmieniany tylko podczas programowania.
Parametr nie może być zmieniany podczas pracy.
1.6. OPIS FUNKCJI SPECJALNYCH
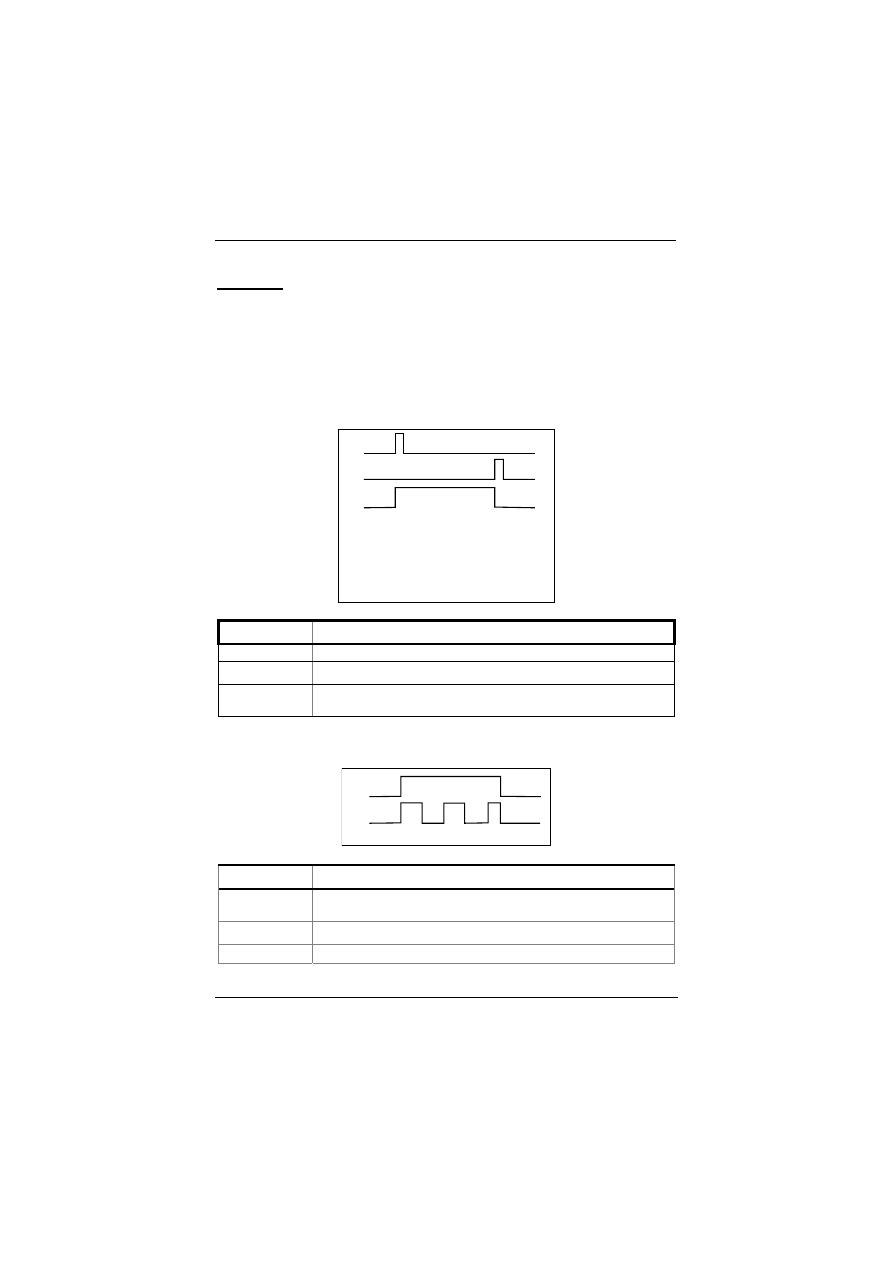
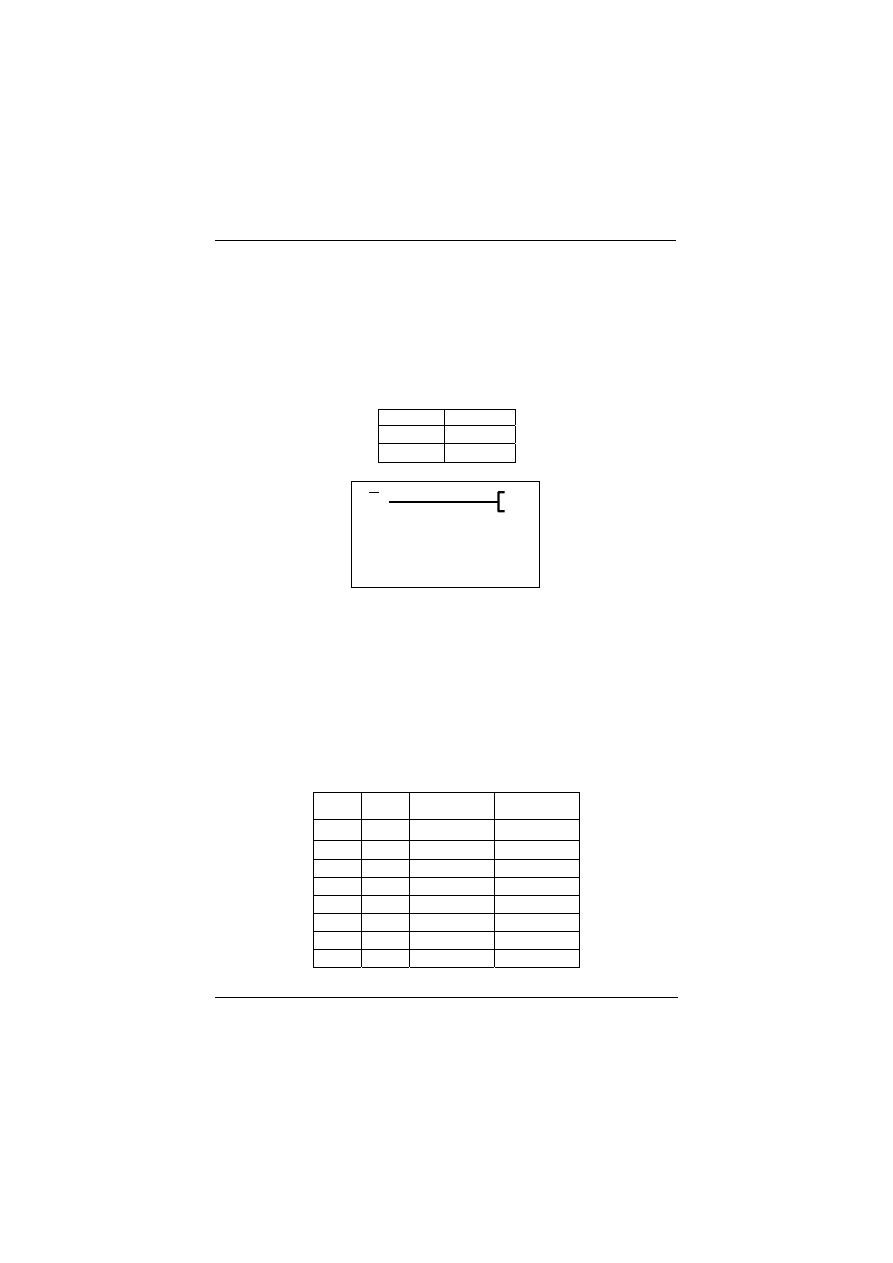
1.6.1. Opóźnione załączenie: on – delay
ZACISKI
OPIS
Wejście Trg
Wyzwolenie startu do opóźnionego załączenia
Parametr T
Czas po którym wyjście Q jest załączane (stan z 0 na 1)
Wyjście Q
Q = 1 po upływie czasu T, jeśli Trg = 1
T
Trg
Q
T
Kiedy stan na wejściu Trg zmienia się z 0 na 1, to czas T zaczyna upływać.
Jeśli stan na wejściu Trg pozostaje równy 1 dostatecznie długo, to wyjście
Q ustawia się na 1 po upłynięciu czasu T. Jeśli stan na wejściu zmienia się z
powrotem na 0 przed upłynięciem czasu T, to czas jest kasowany. Kiedy
wejście Trg jest w stanie 0, to wyjście Q kasowanie jest do 0.
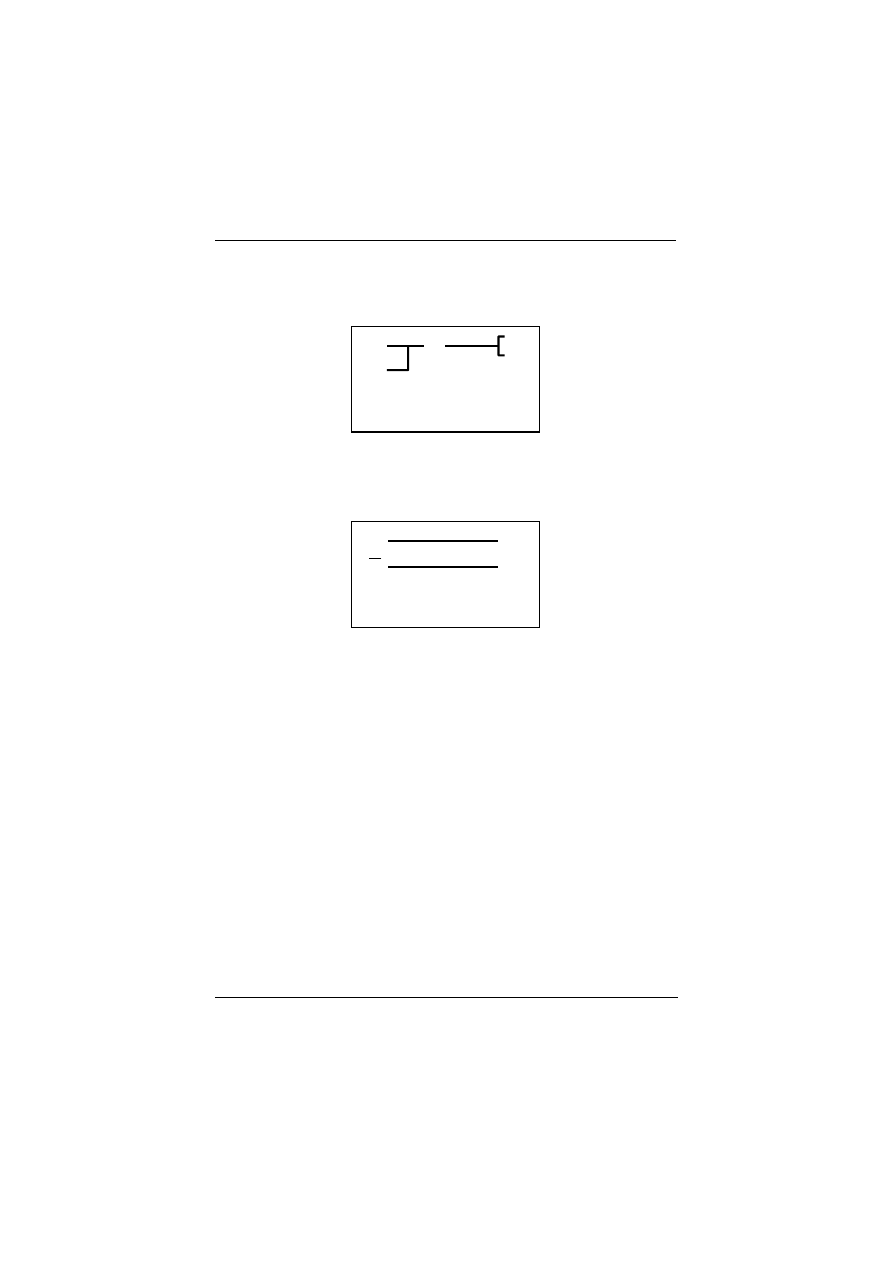
1.6.2. Opóźnione wyłączenie: off – delay
Kiedy stan na wejściu Trg zmienia się na 1, to wyjście Q jednocześnie
przełącza się na 1. Jeżeli stan Trg zmienia się z 1 na 0 to czas T jest starto-
wany i wyjście pozostaje ustawione. Jeżeli czas T osiąga ustawioną war-
tość, wyjście Q jest resetowane na 0 (opóźnione wyłączenie). Jeżeli wejście
Laboratorium Aparatów Elektrycznych @KEMOR
15
Trg jest załączone i wyłączone ponownie, czas T startuje jeszcze raz. Reset
czasu T przed upłynięciem i wyjścia Q odbywa się poprzez nadrzędny R
(reset).
T
Trg
Q
T
R
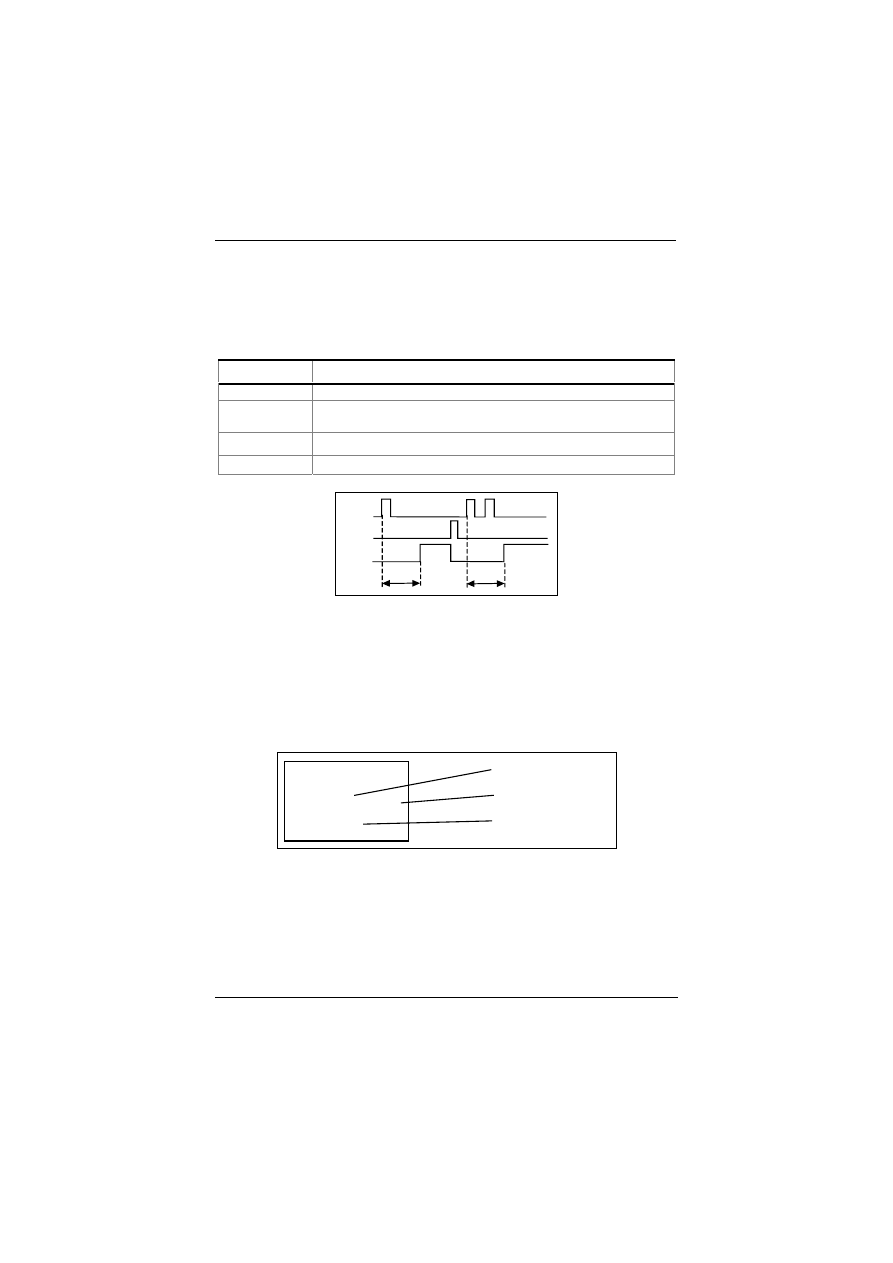
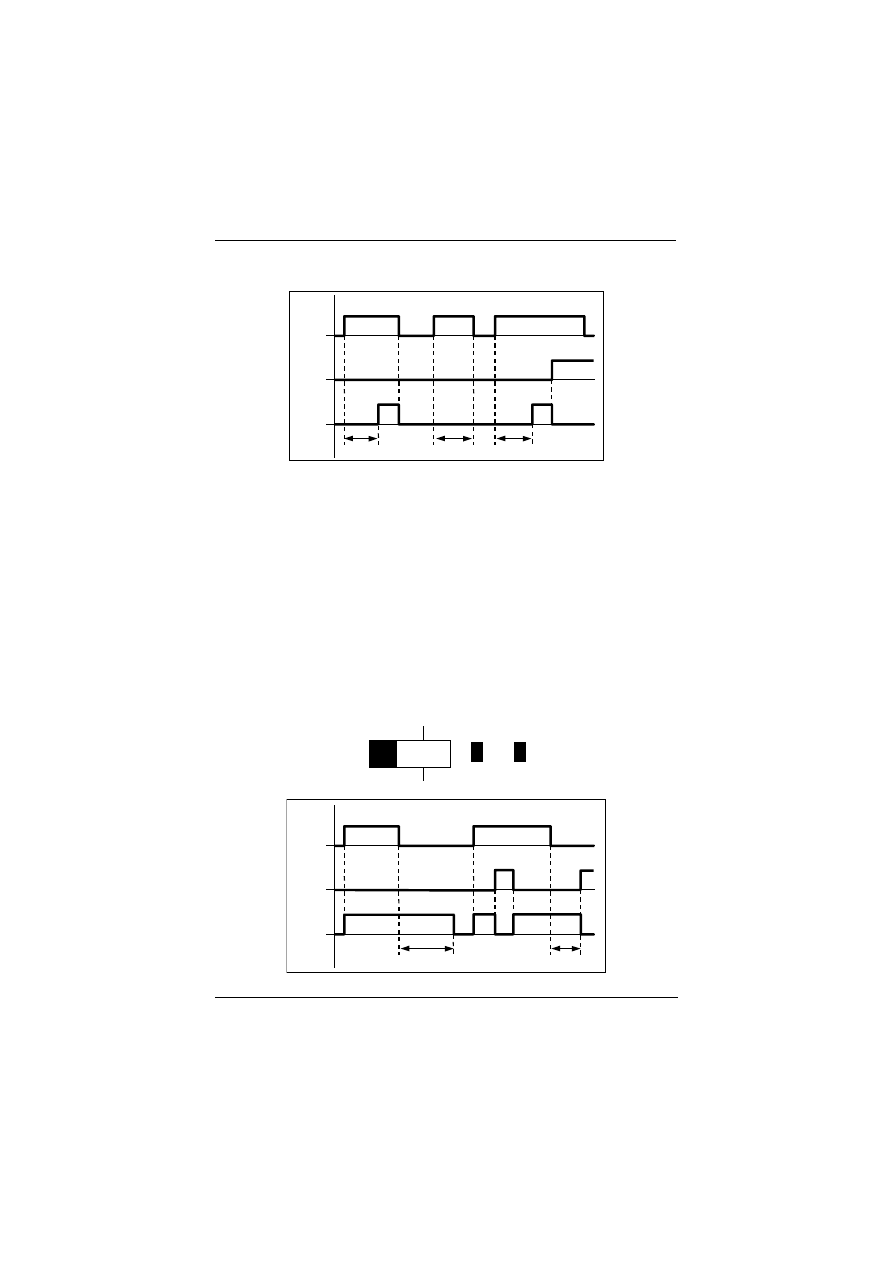
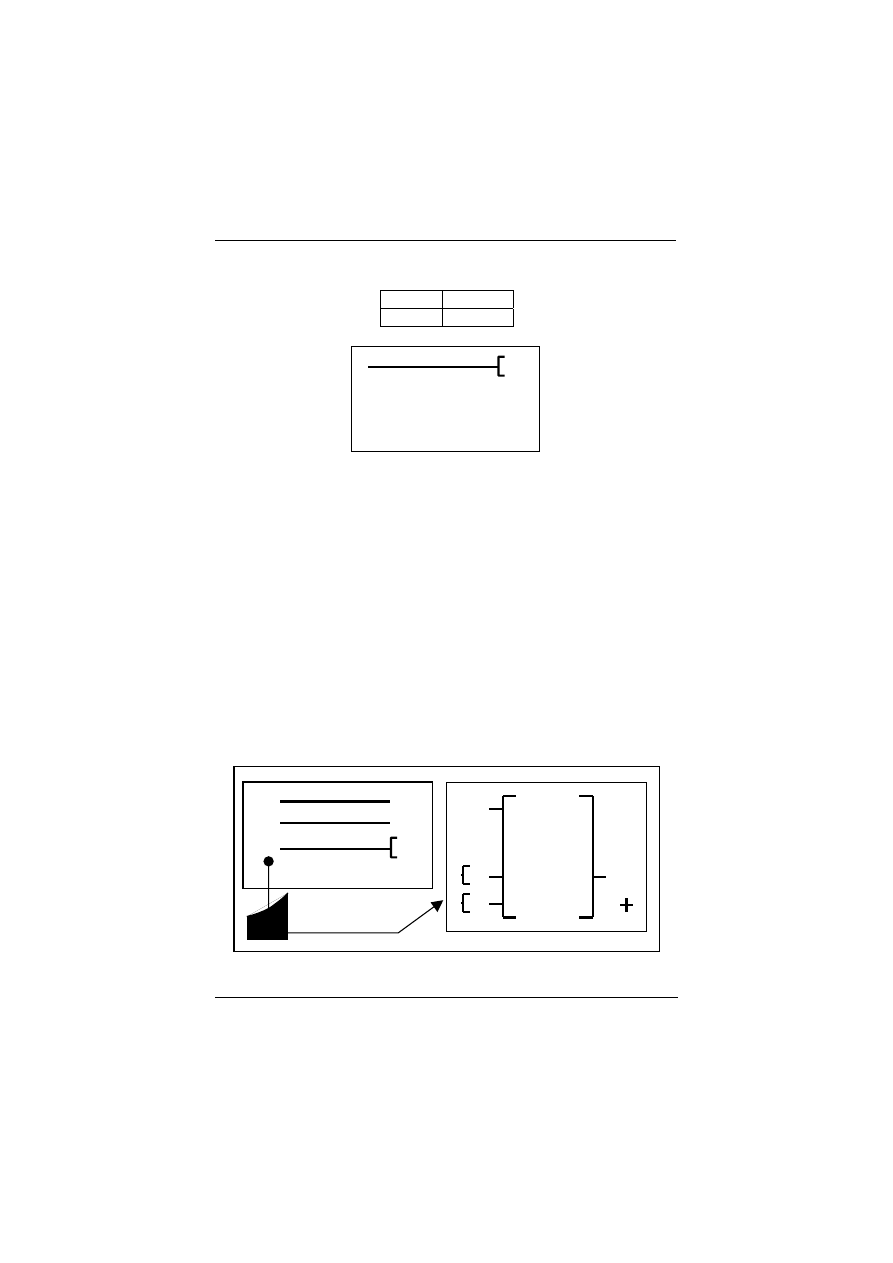
1.6.3. Przekaźnik impulsowy
T rg
Q
R
P a r – m o ż na go u ż yć d o za łą czania
i w y łączan ia p o dtrzy m ania
R em :
o ff – b ez p o dtrzy m a nia
on – stan m o że b yć za pa m iętan y
Za każdym razem gdy stan wejścia Trg zmienia się z 0 na 1, stan wyjścia Q
zmienia się także. Reset przekaźnika impulsowego do stanu początkowego
odbywa się poprzez wejście R. Po wyłączeniu zasilania lub resetowaniu,
przekaźnik impulsowy jest kasowany i wyjście Q zmienia się na 0.
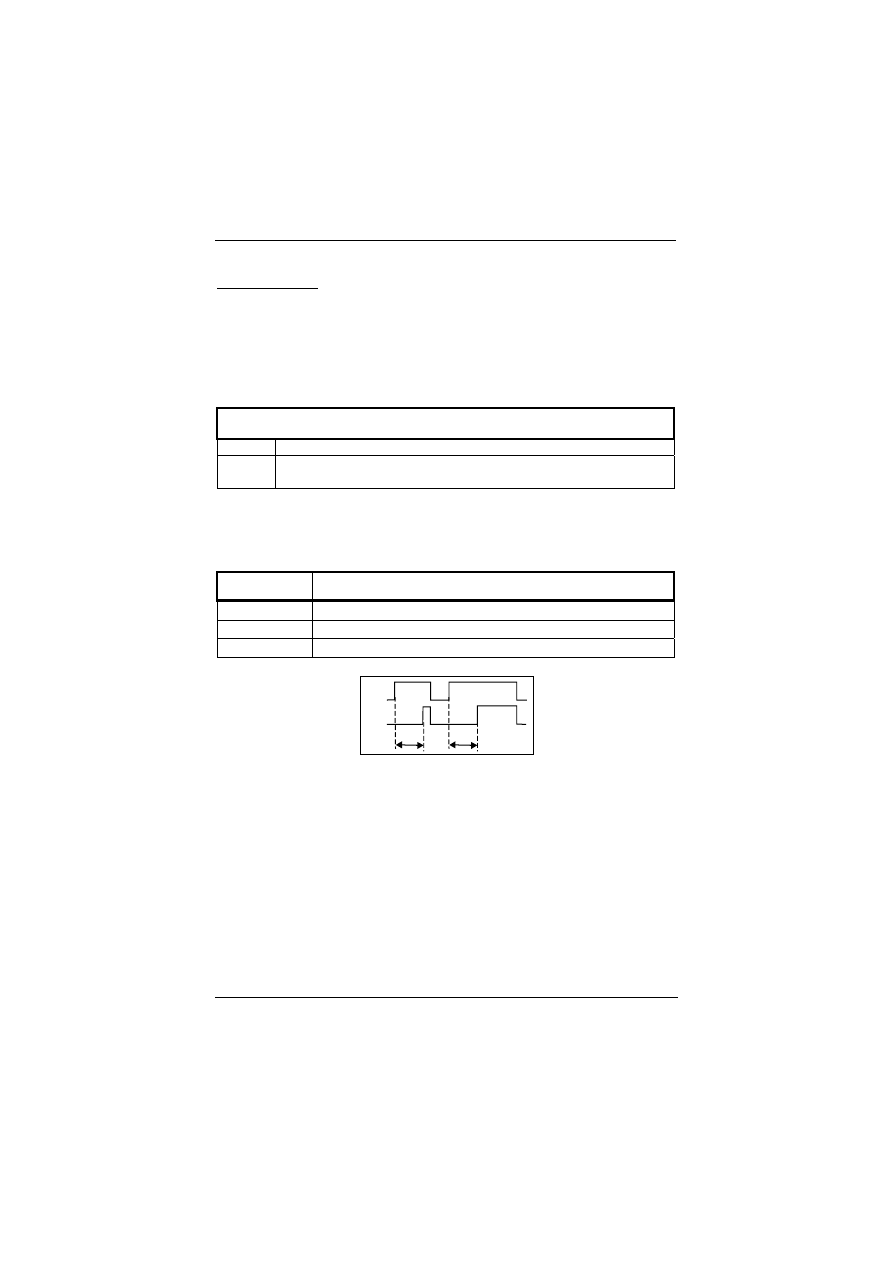
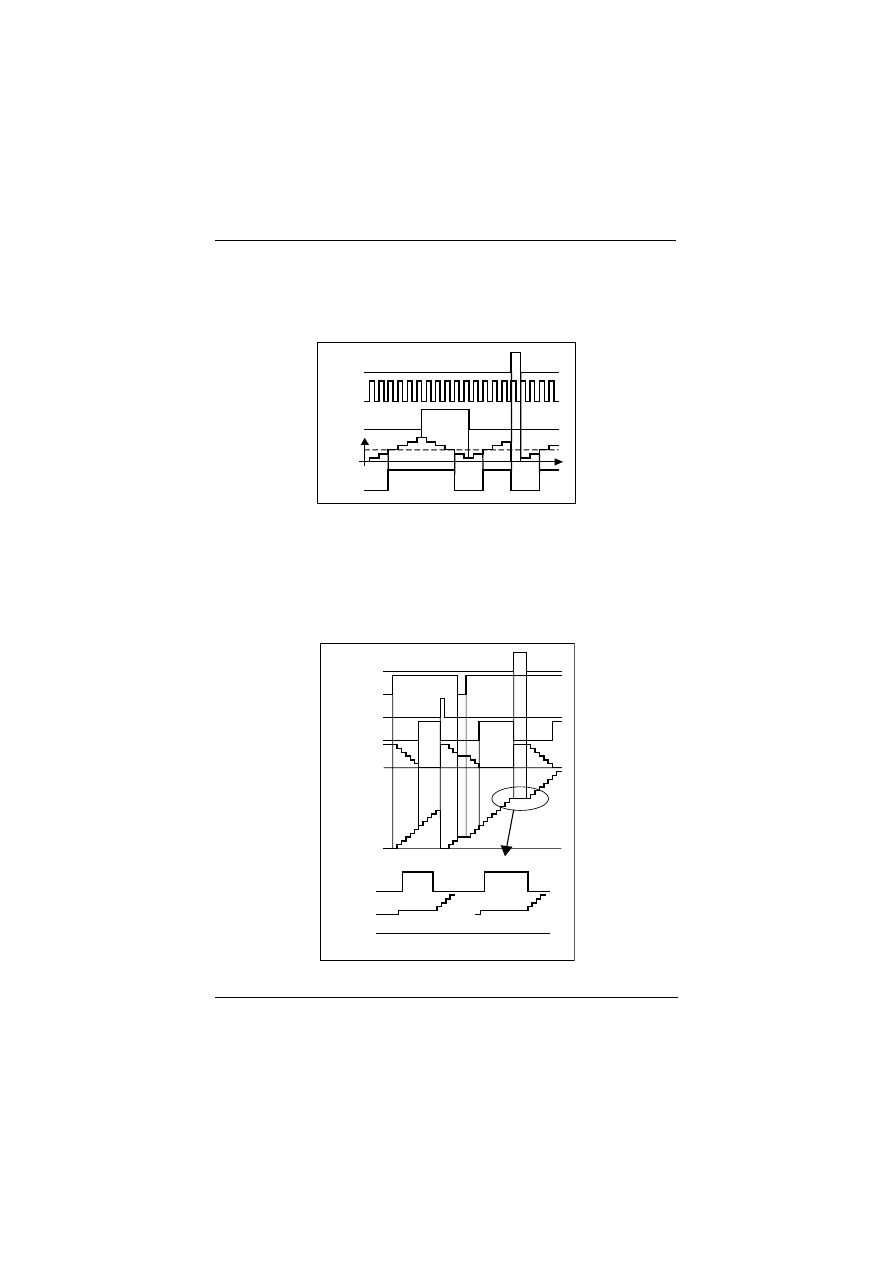
1.6.4. Zegar sterujący
Każdy zegar posiada 3 „krzywki programowe”. Wyjście Q jest załą-
czone jeśli jedna ze sparametryzowanych krzywek jest załączona.
Dzień tygodnia:
Su
niedziela
Mo
poniedziałek
Tu
wtorek
We
środa
Th
czwartek
Fr
piątek
Sa
sobota
Mo..Fr
każdy dzień od poniedziałku do piątku
Laboratorium Aparatów Elektrycznych @KEMOR
16
Mo..Sa
każdy dzień od poniedziałku do soboty
Mo..Su
każdy dzień
Sa..Su
sobota i niedziela
B01:No1
Day=Mo +
On =06:00
Off=19:00
Blok B01
Krzywka nr 1
Dzień tygodnia
Godzina załączenia
Godzina wyłączenia
Okno parametru dla krzywki No1.
No1
No2
No3
10:00 15:00
9:00
18:00
8:00
16:00
ON
OFF
ON
OFF
ON
OFF
Załącz
Wyłącz
No1..3 ustalają okresy załączenia wyjścia Q
Switch-on time (czas załączenia)
Dowolny czas pomiędzy godziną 00:00 a 23:59
- - ; - - znaczy, że brak czasu załączenia
Switch-off time (czas wyłączenia)
Dowolny czas pomiędzy godziną 00:00 a 23:59
- - ; - - znaczy, że brak czasu wyłączenia
Bufor zegara
Zegar posiada rezerwowe zasilanie. Przy temperaturze 25
°C wystarczy na
80 godzin.
Zachodzenie krzywek
Zegar załącza wyjście jeśli nie było wcześniej załączone.
Zegar wyłącza wyjście jeśli nie było wcześniej wyłączone.
Laboratorium Aparatów Elektrycznych @KEMOR
17
Priorytety
Jeśli czas załączenia oraz czas wyłączenia jest taki sam dla różnych krzy-
wek, to czasy załączenia / wyłączenia będą zaprzeczać sobie wzajemnie.
W takim przypadku krzywka No3 ma wyższy priorytet niż krzywka No2,
a krzywka No2 niż krzywka No1.
1.6.5. Przekaźnik zatrzaskowy
S
Q
R
Par – można go użyć do załączania
i wyłączania podtrzymania
Rem:
off – bez podtrzymania
on – stan może być zapamiętany
ZACISKI
OPIS
Wejście S
S = 1 powoduje załączenie Q na 1
Wejście R
R = 1 powoduje ustawienie Q na 0 (ma wyższy priorytet od S)
Wyjście Q
Q jest załączone gdy ustawione jest wejście S i pozostaje załą-
czone dopóki nie zostanie ustawione wejście R
1.6.6. Generator taktu (impulsów symetrycznych)
En
Q
T
T
T
T
ZACISKI
OPIS
Wejście En
Załączenie i wyłączenie generatora impulsów poprzez wejście
En (zezwolenie)
Parametr T
Czas, po którym wyjście jest załączone lub wyłączone
Wyjście Q
Załącza się i wyłącza cyklicznie po czasie T
Laboratorium Aparatów Elektrycznych @KEMOR
18
Generator impulsów ustawia wyjście Q na 1 w czasie T, następnie na 0
w kolejnym czasie T i tak aż do momentu pojawienia się na wejściu En = 0.
1.6.7. Podtrzymane opóźnienie załączenia
ZACISKI
OPIS
Wejście Trg
Wyzwalacz wystartowania czasu T
Wejście R
Reset czasu opóźnienia załączenia i ustawienie wyjścia Q na 0
(wyższy priorytet niż Trg)
Parametr T
Czas, po którym wyjście jest załączone (zmiana stanu z 0 na 1)
Wyjście Q
Załącza się po upływie czasu T
Trg
Q
R
T
T
Jeżeli stan wejścia Trg zmienia się z 0 na 1, to zaczyna być odliczany aktu-
alny czas T. Kiedy T osiąga żądaną wartość, wyjście Q ustawione jest na 1.
W czasie osiągnięcia T inne operacje przełączania na wejściu Trg nie po-
wodują żadnego efektu. Wyjście i czas T są resetowane po podaniu stanu 1
na wejście R.
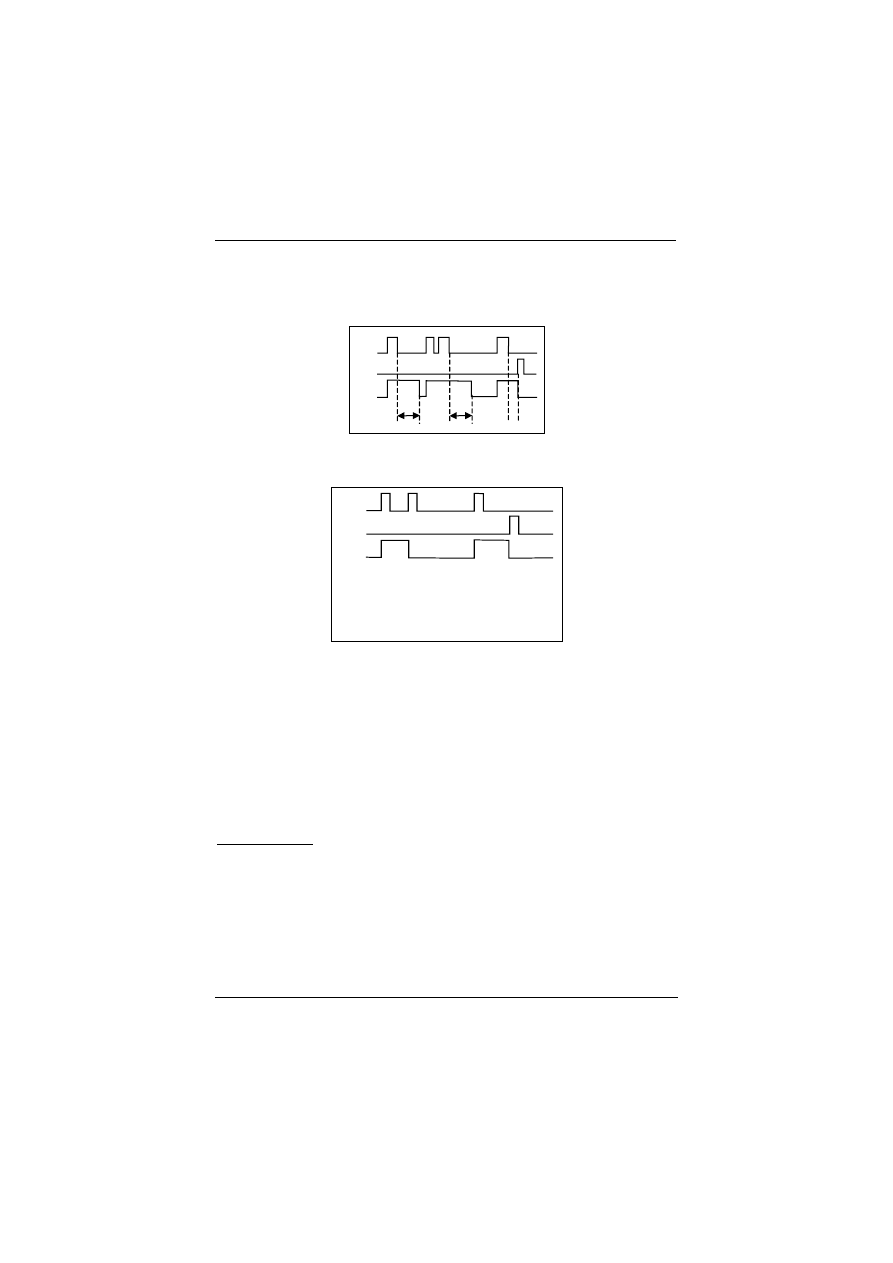
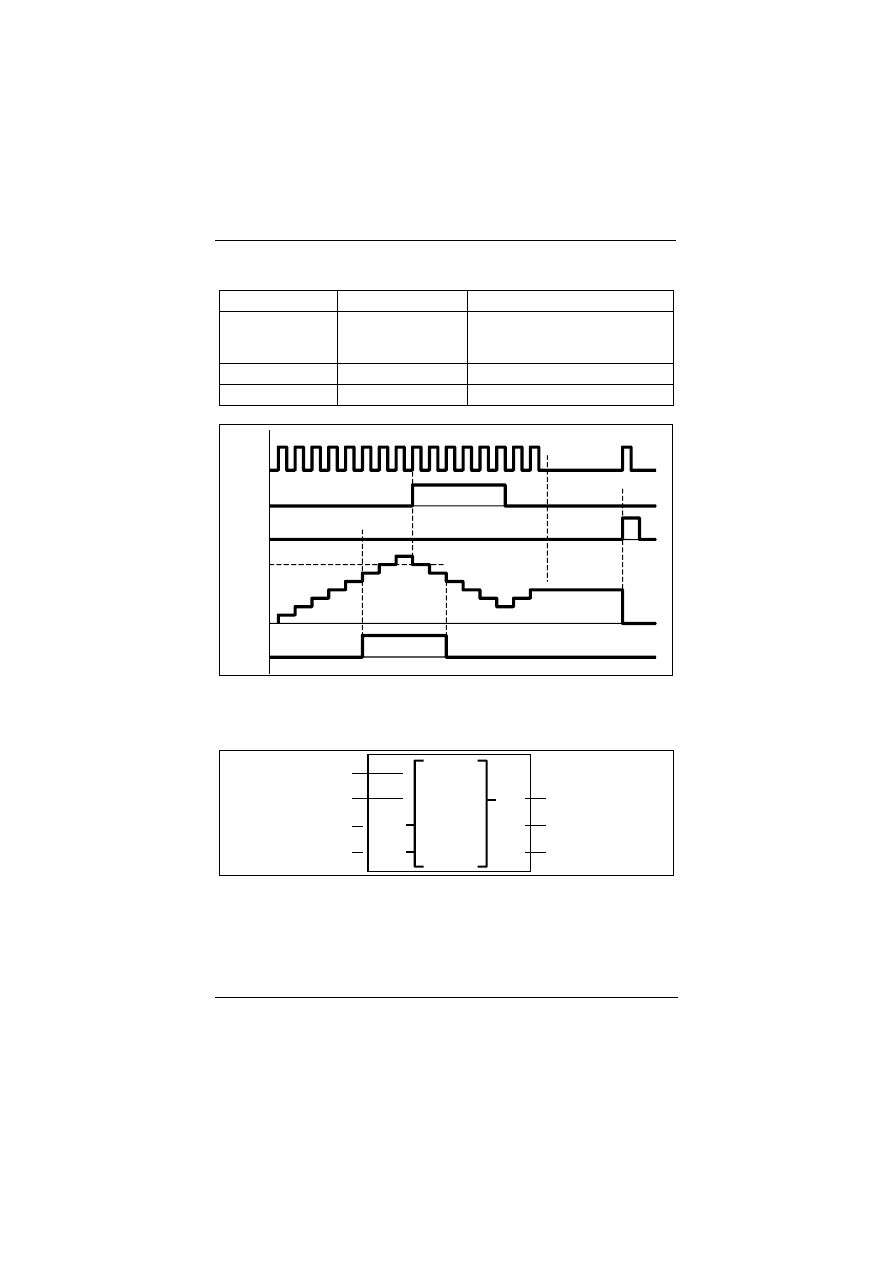
1.6.8. Dwukierunkowy licznik zdarzeń
Typ zabezpieczenia
Nastawa licznika
Podtrzymanie
B03:Par
Lim=
000100h +
Rem=off
Nastawa parametru Par.
Przy każdym narastającym zboczu na wejściu Cnt, wewnętrzny licznik jest
zwiększany o jeden (Dir=0) lub zmniejszany o jeden (Dir=1). Jeżeli we-
wnętrzna wartość zliczona jest większa lub równa wartości określonej przez
Par, to wyjście Q jest ustawiane na 1. Podanie na R stanu 1 powoduje ka-
sowanie wewnętrznej wartości licznika na ‘0000’ lub ‘000000’ i ustawienie
wyjścia Q na 0.
Laboratorium Aparatów Elektrycznych @KEMOR
19
Wejście jest ustawiane, jeśli wartość wewnętrzna licznika jest większa lub
równa Par lub Lim. W przypadku przepełnienia licznik zatrzymuje się.
Przebieg czasowy
D ir
Q
0
C nt
R
Par
Par
może być dowolną wartością z przedziału od 0 do 9999.
Lim
może być dowolną wartością z przedziału od 0 do 9999.
Rem
służy do załączania i wyłączania podtrzymania wewnętrznej wartości
licznika Cnt.
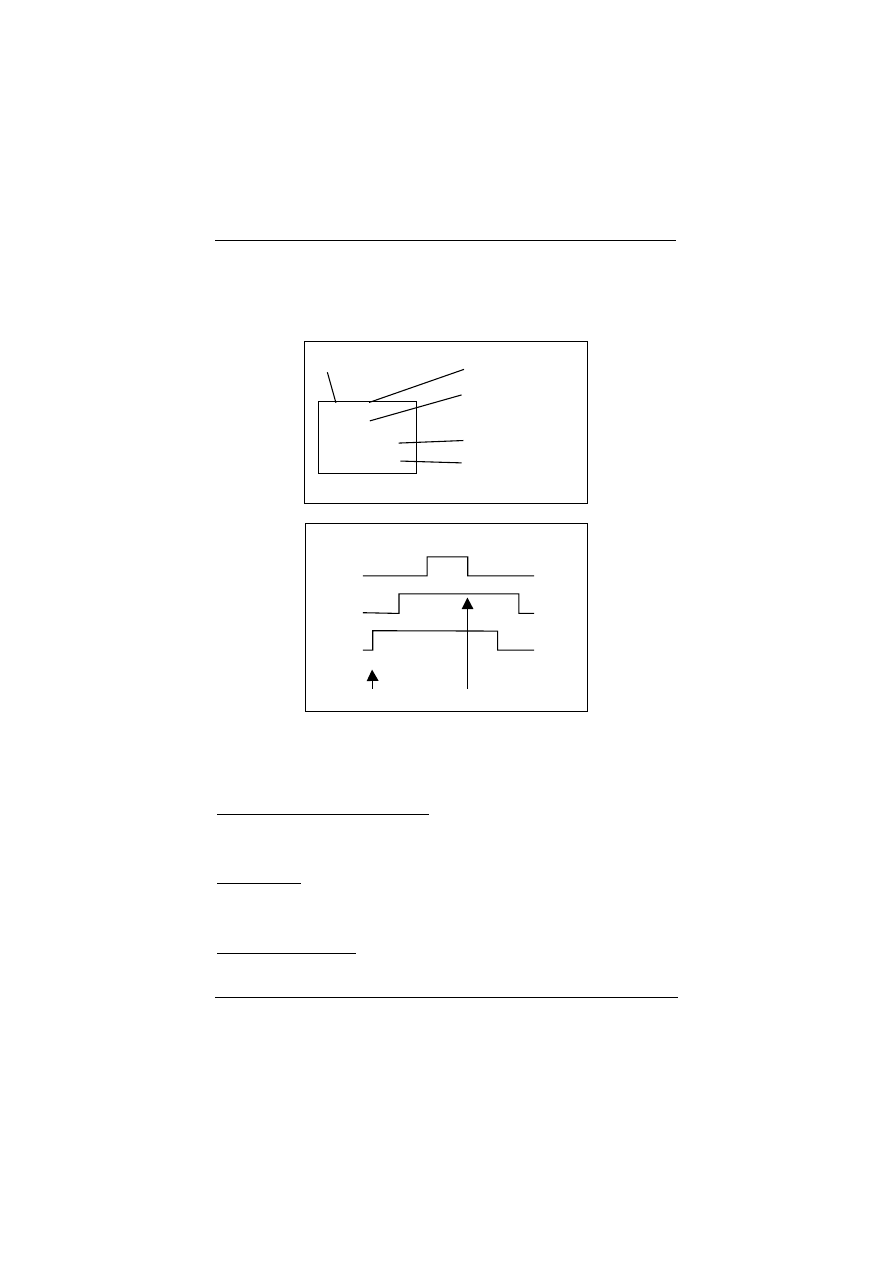
1.6.9. Licznik czasu pracy
R
En
Patrz
rysunek
niżej
M I=6h
Ral
OT
Q
MN=MI
R
OT
t
1h
gdy t<30min
t
1h
gdy t>30min
Laboratorium Aparatów Elektrycznych @KEMOR
20
Licznik czasu pracy monitoruje wejście En. Tak długo jak na tym wejściu
jest 1, LOGO! Mierzy czas, który upłynął i pozostały czas. Jeśli pozostały
czas wynosi 0, wyjście Q jest ustawione na 1.
Wartość graniczna dla OT
Jeśli kasowany jest licznik czasu przy pomocy wejścia R, godziny pracy
zliczane w OT pozostają niezmienione. Wartością graniczną dla OT jest
99999 godz. Gdy licznik czasu pracy osiągnie tę wartość, czas nie jest dalej
zliczany.
Użycie wejścia R oraz Ral do:
Kasowania wyjścia Q,
Ustawienie licznika pozostałego czasu na podaną wartość MI
Przy użyciu R wewnętrzny licznik OT pozostaje nie zmieniony.
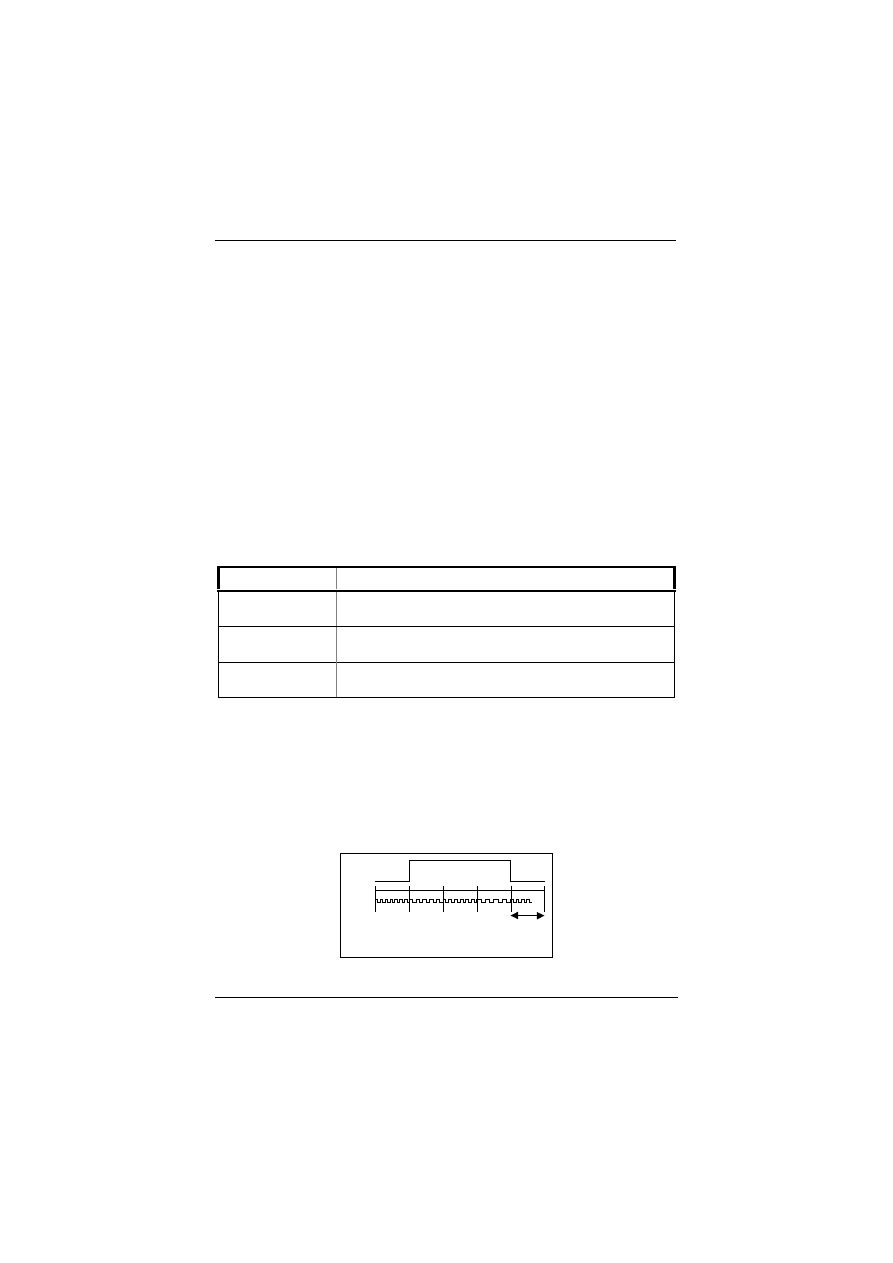
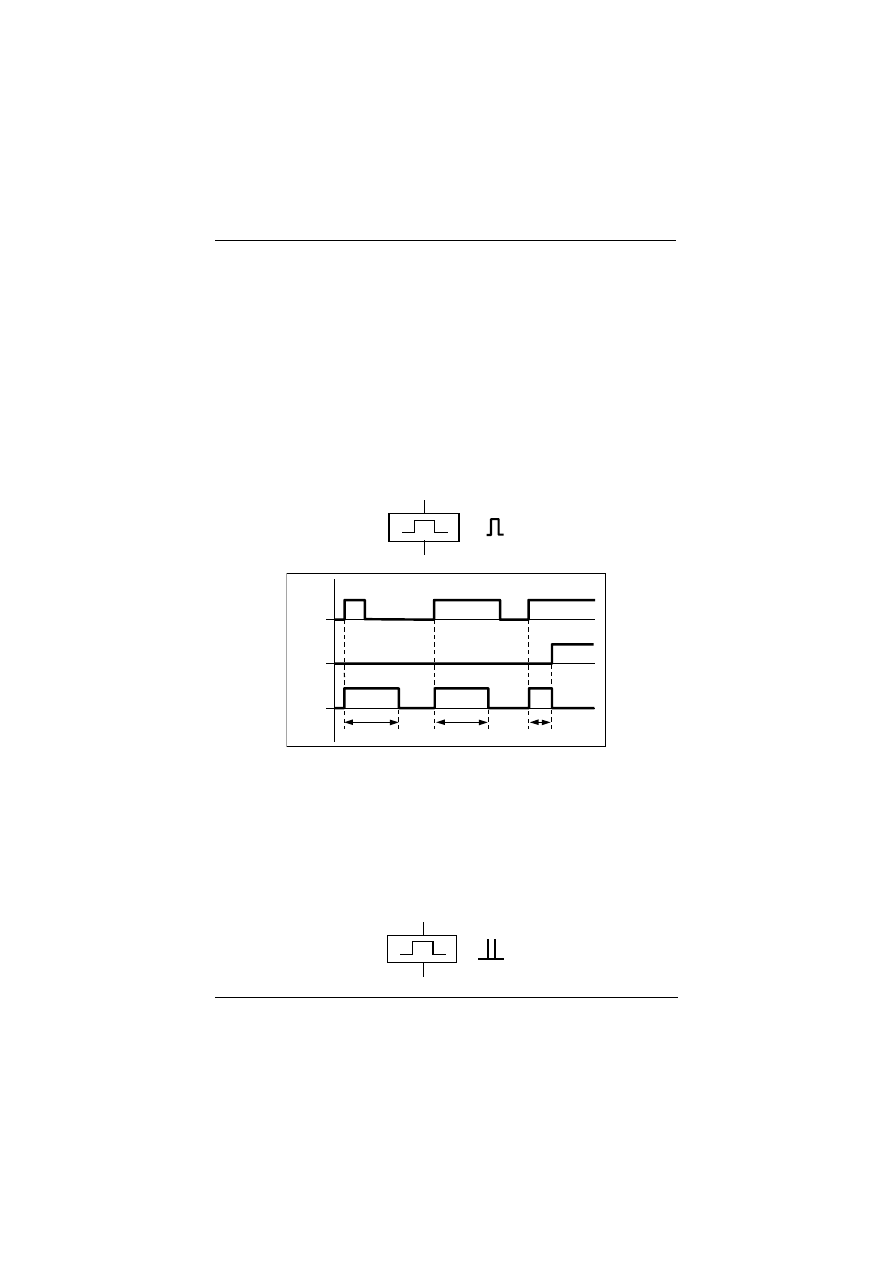
1.6.10. Przekaźnik samokasujący
ZACISKI
OPIS
Wejście Trg
Wyzwalacz wystartowania czasu T, po którym prze-
kaźnik się skasuje
Parametr T
Czas, po którym wyjście jest wyłączone (zmiana sta-
nu z 1 na 0)
Wyjście Q
Załącza się gdy ustawione jest wejście Trg i pozostaje
ustawione aż upłynie czas T
Gdy wejście Trg przechodzi w stan 1, wejście Q załącza się natychmiast
w stan 1. W tej samej chwili startuje odliczanie czasu, a wyjście pozostaje
ustawione. Gdy czas osiągnie nastawioną wartość T, wyjście Q jest kaso-
wane (wyjście impulsowe). Gdy Trg zmienia się na zero, zanim upłynie
ustawiony czas, wyjście także natychmiast przechodzi ze stanu 1 w stan 0.
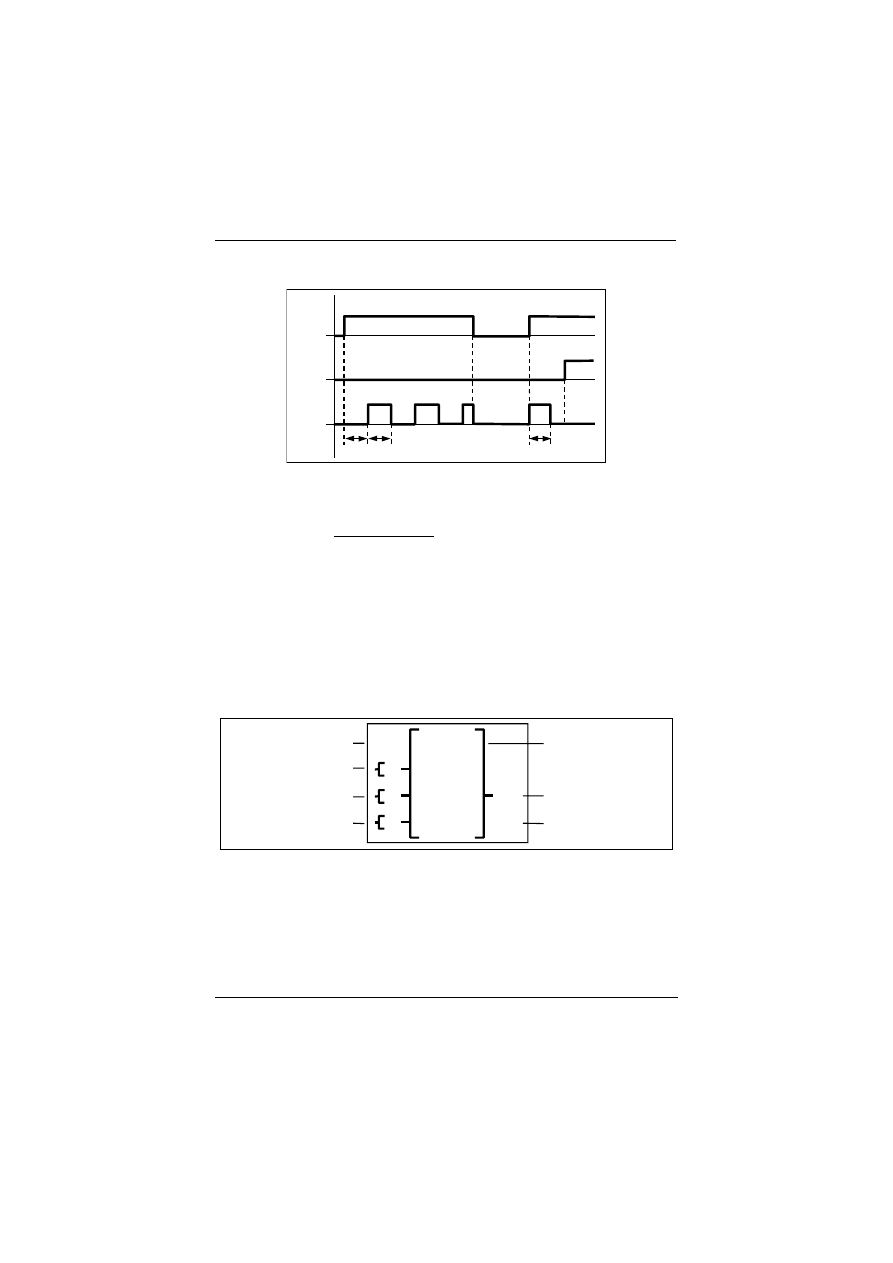
1.6.11. Detektor częstotliwości
Q
SW
↑ = 6
Ilość
5
7
6
4
SW
↓ = 4
G_T
Laboratorium Aparatów Elektrycznych @KEMOR
21
Detektor częstotliwości zlicza impulsy na wejście Fre. Impulsy są zliczane
przez parametryzowany czas G_T. Jeśli liczba impulsów zliczona w czasie
G_T jest większa niż nastawy poziomów załączania i wyłączania wyjście Q
jest załączone. Wyjście Q jest wyłączone, gdy zliczona liczba impulsów
osiągnie lub spadnie poniżej poziomu wyłączenia.
1.7. LISTA
ZACISKÓW
LISTA ZACISKÓW Co
Wejść
I1, I2, . . .
Poziomów
hi = 1, lo = 0
Wyjść
Q1, Q2, . . .
Braku zacisku
x
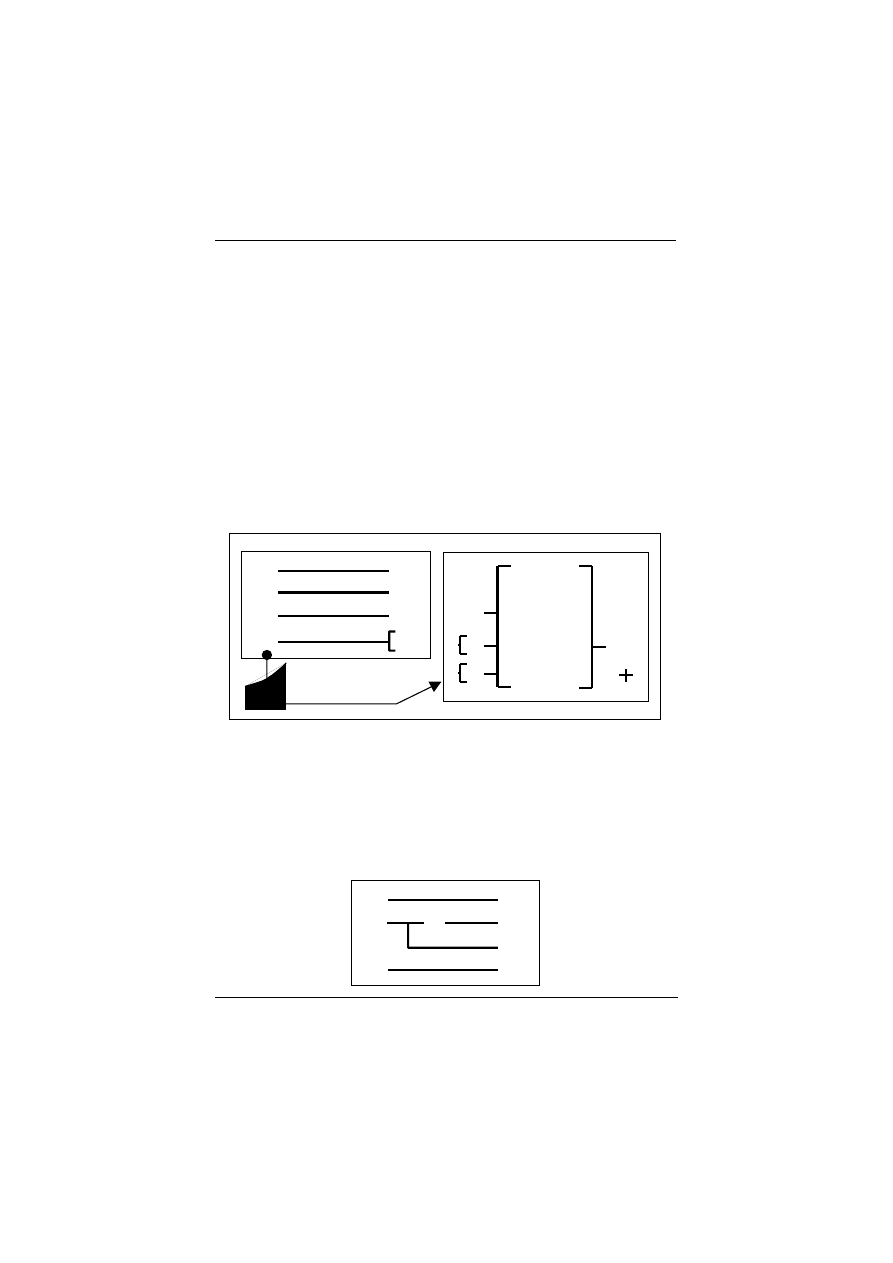
1.8. BLOKI I ICH NUMERY
Rysunek poniżej pokazuje typowy wyświetlacz LOGO!. W danej
chwili pokazany może być tylko jeden blok. Z tego powodu wprowadzono
numery bloków, co pomaga rozpoznawać strukturę układu.
Zawsze, gdy wprowadzany jest blok do programu, LOGO! przy-
dziela temu blokowi numer, jest to „numer bloku”.
LOGO! używa numerów bloków do identyfikacji połączeń pomię-
dzy blokami. Numer bloku jest później podstawową pomocą przy porusza-
niu się w programie.
x
I2
B02
Q1
≥1
B01
Obraz wyświetlacza LOGO!
Pokazuje, że podłączony
jest następny blok
Numer bloku – jest
przydzielony przez
LOGO!
Wejście
Wyjście
Blok
Nie istnieje dalsze połączenie
Laboratorium Aparatów Elektrycznych @KEMOR
22
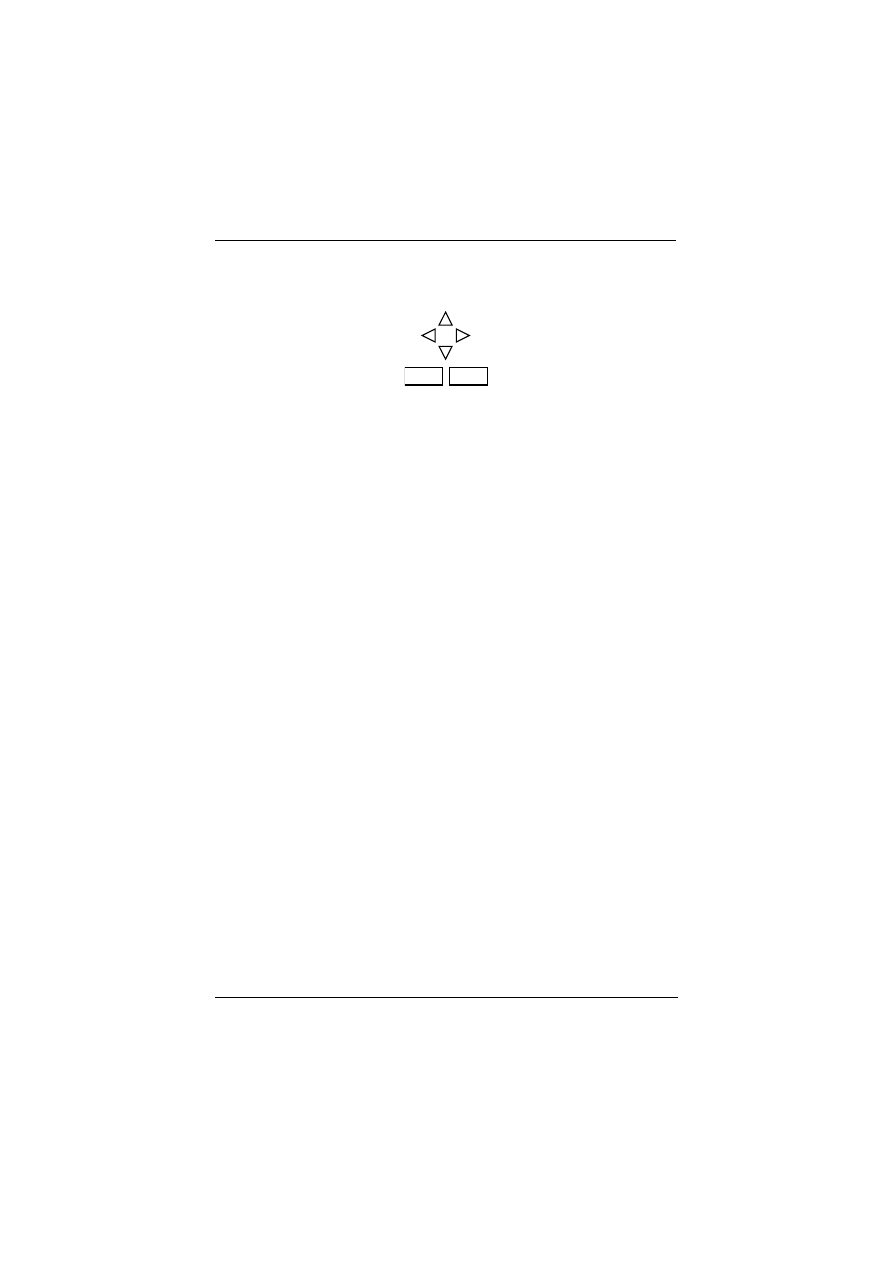
1.9. CZTERY ZASADY PRZY PRACY Z LOGO!
ESC
OK
ZASADA 1
– Trzy palce
Struktura logiczna sterowania wprowadzana jest w trybie pro-
gramowania.
Przełączenie do trybu programowania odbywa się poprzez jed-
noczesne wciśnięcie trzech klawiszy:
← → oraz klawisz OK.
Wartości czasów i parametrów zmieniane są w trybie parame-
tryzowania.
Przełączenie do trybu parametryzowania odbywa się poprzez
jednoczesne wciśnięcie dwóch klawiszy: ESC oraz OK.
ZASADA 2 – Od wyjścia do wejścia
Strukturę logiczną sterowania (program) należy wprowadzać
w kolejności od wyjścia do wejścia.
ZASADA 3
– Kursor i przesuwanie kursorem
Podczas wprowadzania programu obowiązują następujące re-
guły:
• Kiedy kursor ukazuje się z podkreśleniem, można przesu-
wać kursorem
:
−
←↑→↓ przesuwanie kursorem po blokach,
−
OK wybór połączenia / bloku,
−
ESC rezygnacja wykonanej operacji.
• Kiedy kursor ukazuje się w postaci stałego bloku, należy
wybrać zacisk / blok:
−
↑↓ wybranie zacisku / bloku,
−
OK zaakceptowanie wyboru,
−
ESC powrót do pierwszego kroku.
ZASADA 4
– Zapamiętanie programu
LOGO! może pamiętać tylko kompletne programy. Jeśli pro-
gram jest niekompletny, to nie można wyjść z trybu programo-
wania.
Laboratorium Aparatów Elektrycznych @KEMOR
23
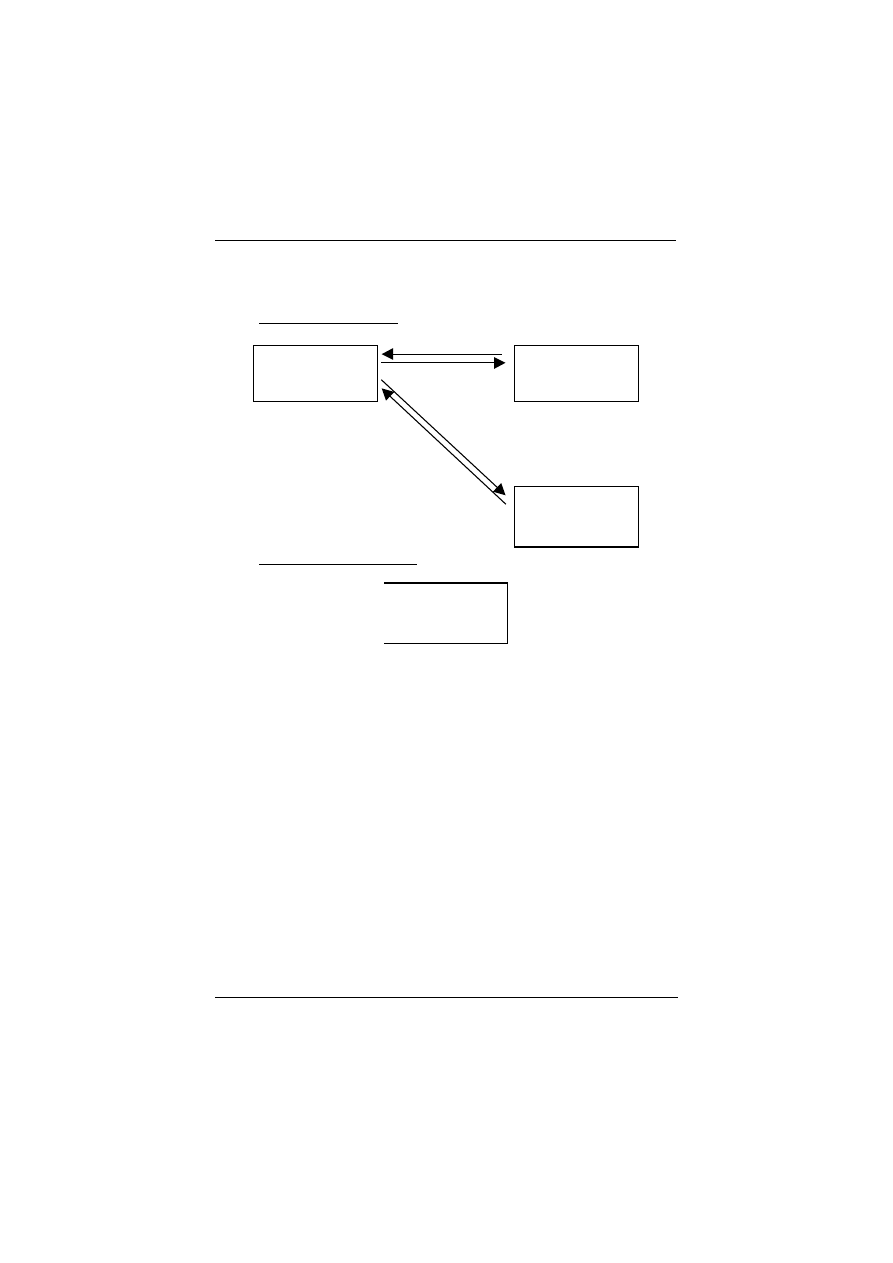
1.10. PRZEGLĄD MENU PROGRAMU
Tryb programowania
>Program . .
PC/Card . .
Start
>Edit Prg
Clear Prg
Set Clock
>PC←→LOGO
LOGO
→Card
Card
→LOGO
Menu „Program”
Menu „PC/Card”
OK
OK
ESC
ESC
Tryb parametryzowania
>Set Clock
Set Param
1.11. OGRANICZENIA STAWIANE LOGO!
•
Liczba bloków nie może przekroczyć 30,
•
Nie można przekroczyć pamięci dostępnej,
•
Wynikowa ilość kolejno połączonych bloków nie może przekro-
czyć 7.
1.12. PROGRAM LOGO!SOFT
LOGO!Soft V 1.0 jest pakietem programowym do użycia na PC.
Oprogramowanie zawiera następujące funkcje:
•
Tworzenie programu aplikacji bez połączenia z LOGO! (offline).
•
Symulacja układu (czyli programu) na komputerze.
•
Tworzenie i drukowanie schematu ideowego układu.
•
Zapis programu na twardym dysku lub innym medium.
•
Przesłanie programu:
- Z LOGO! do PC.
- Z PC do LOGO!.
Laboratorium Aparatów Elektrycznych @KEMOR
24
Układanie programu w oprogramowaniu LOGO!Soft jest identyczne
jak w module LOGO!, z tą różnicą, że wejście w tryb programowania lub
parametryzacji odbywa się poprzez kliknięcie na odpowiedni przycisk
z paska narzędzi.
W trakcie programowania możliwy jest podgląd schematu ideowego
programu. Warto zauważyć, że schemat ten jest przedstawiony w nieco inny
sposób. LOGO!Soft pokazuje wszystkie bloki liniowo wierszami z powtó-
rzeniami, jeśli takie zaistnieją. Nie oznacza to, że jest on inny. Powtarzane
bloki schematu są rysowane innym kolorem.
Tryb symulacji można osiągnąć wybierając składnik „START”
z menu LOGO. Na ekranie dodatkowo pojawiają się przyciski do podawa-
nia sygnałów na wejścia LOGO! oraz sygnalizacja świetlna reprezentująca
stan zestyków przekaźników LOGO!.
Laboratorium Aparatów Elektrycznych @KEMOR
25
2. POGRAMY
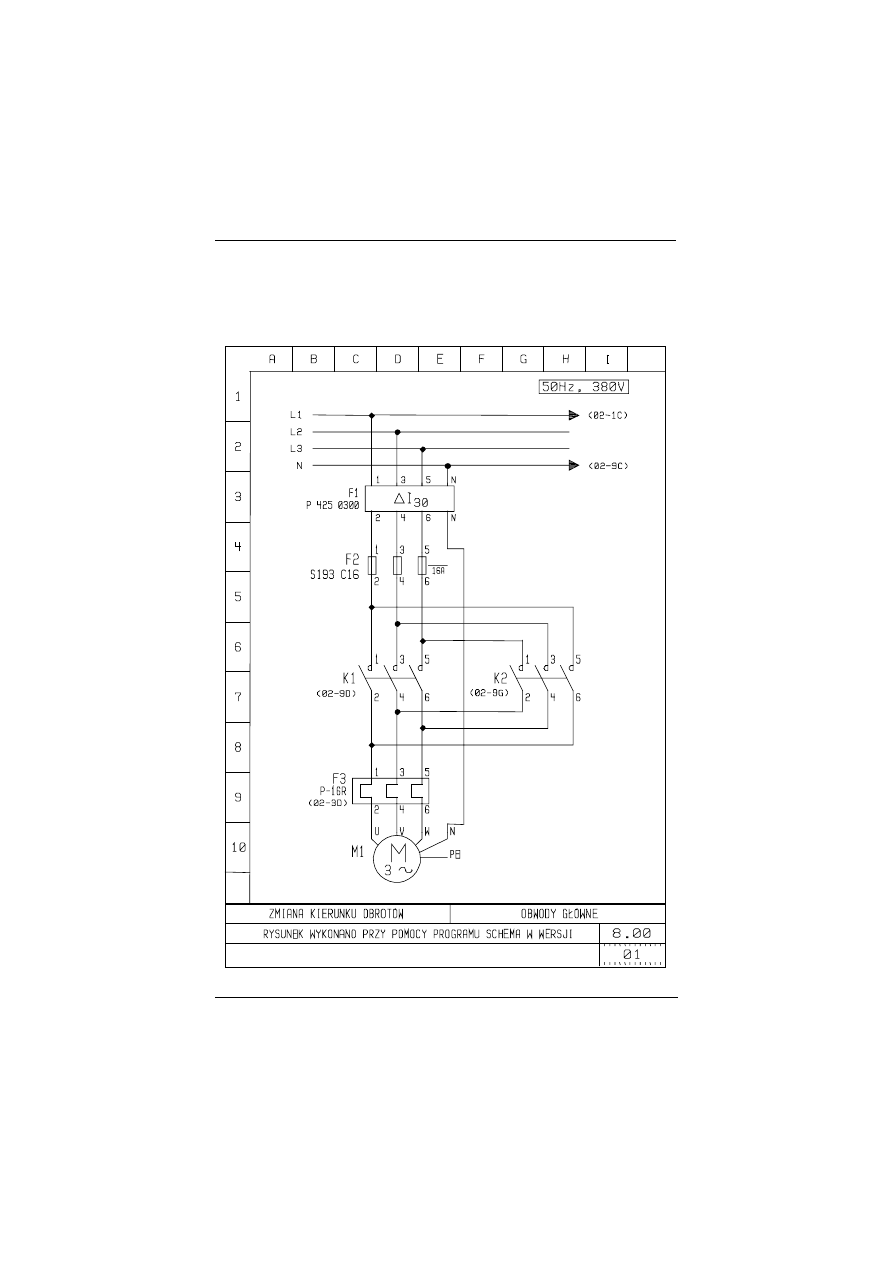
2.1. ZAŁĄCZENIE SILNIKA NA LEWE – PRAWE OBROTY
2.1.1. Obwody siłowe
Laboratorium Aparatów Elektrycznych @KEMOR
26
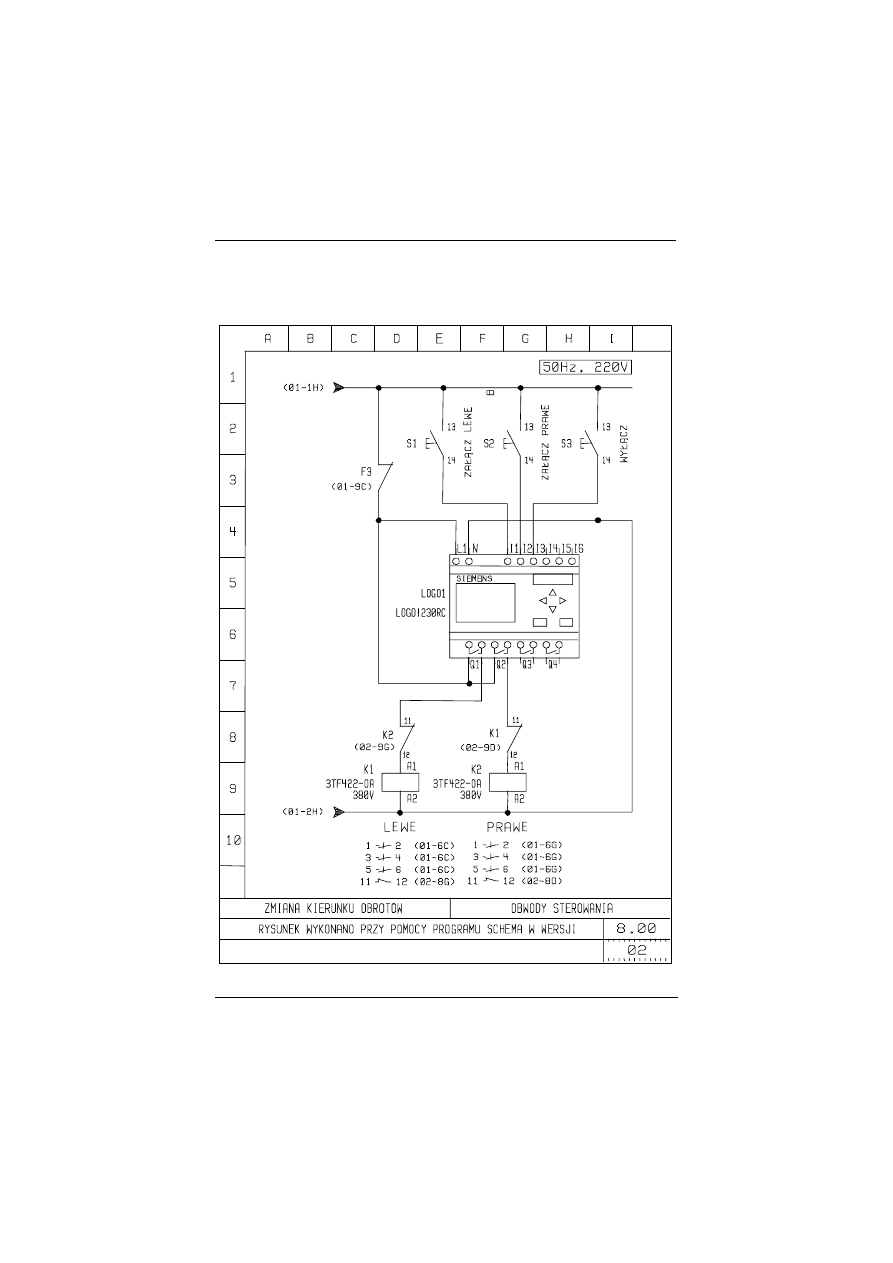
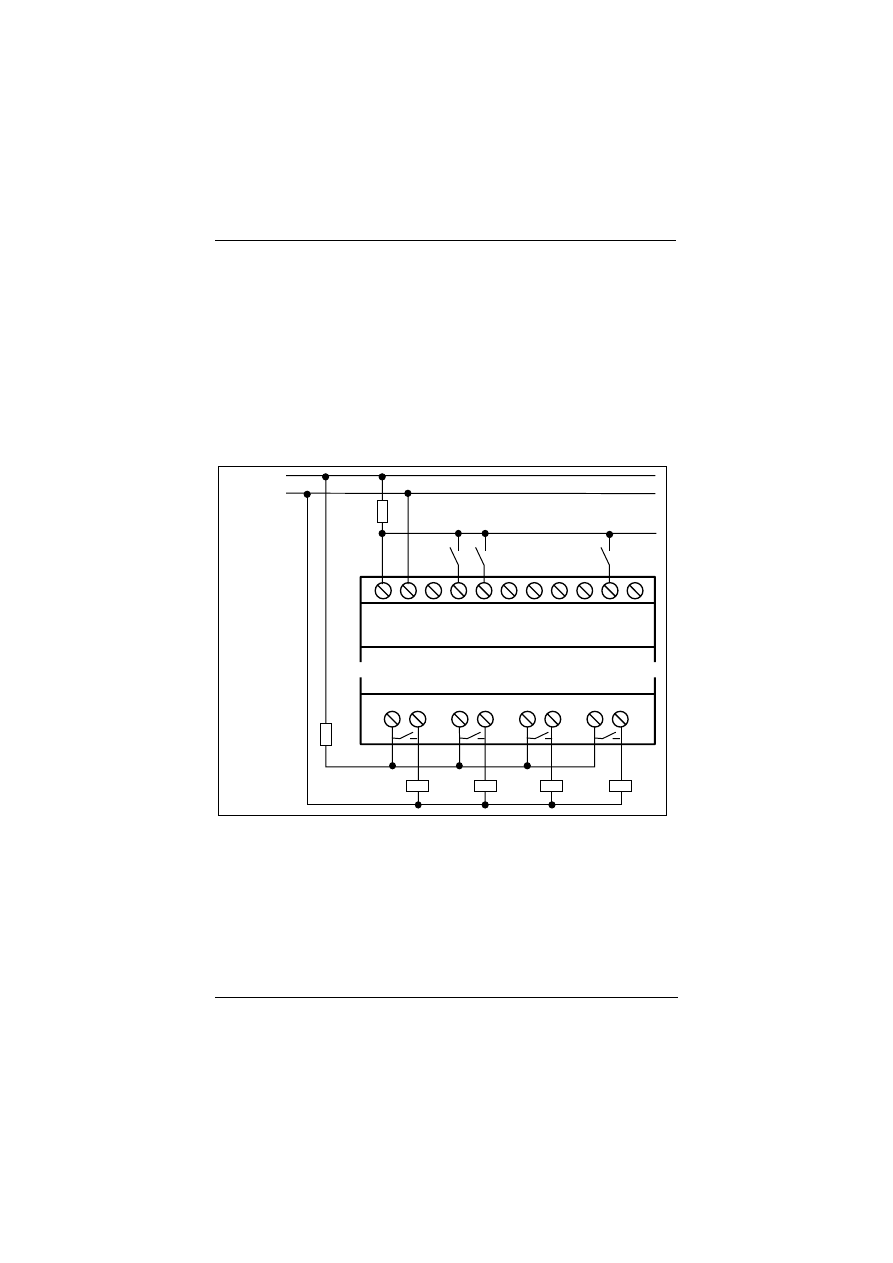
2.1.2. Obwody sterowania
Laboratorium Aparatów Elektrycznych @KEMOR
27
2.1.3. Wpisywanie programu do LOGO!
−
Wejście w tryb programowania poprzez jednoczesne wciśnięcie trzech
przycisków:
← → OK.,
−
Wcisnąć OK – wejście w menu „Program” do „Edit Prg”,
−
Jeżeli już istniał program w LOGO!, to należy go wyczyści poprzez
„Clear Prg”,
−
Wcisnąć OK – wejście do edycji programu, na wyświetlaczu pojawi
się wyjście Q1,
−
Wcisnąć „
←” w celu przyłączenie bloku do wyjścia Q1,
−
Wcisnąć „OK”, na wyświetlaczu pojawi się dodatkowo „
↓Co”,
−
Przycisnąć „
↑” lub „↓” aby wybrać „↓SF”, a potem „OK” aby po-
twierdzić wybór,
−
Przycisnąć „
↑” lub „↓” aby wybrać symbol bloku B01 i potwierdzić
poprzez „OK”,
−
Kursor edycyjny miga pod literą S bloku B01, toteż należy wcisnąć
„OK”
−
Potwierdzamy wybór „
↓Co”, a potem wybór poprzez „↑” lub „↓” na
„I1”,
−
Kursor edycyjny teraz miga pod literą R bloku B01, toteż należy wci-
snąć „OK”
−
Wybrać oznaczenie „
↓GF” i potwierdzić przez „OK”,
−
Z funkcji podstawowych wybrać poprzez „
↑” lub „↓” blok B02 i po-
twierdzić przez „OK”,
−
Wcisnąć jeszcze raz „OK”, na wyświetlaczu pojawi się „
↓Co”, które
zatwierdzamy „OK”,
−
Wybrać przez „
↑” lub „↓” wyjście Q2 i zatwierdzić „OK”,
−
Kursor edycyjny przejdzie poniżej do drugiego wejścia bloku B03,
które należy wskazać na wejście „I3” oraz analogicznie wybrać trzecie
wejście bloku B03 jako „x”,
−
Zatwierdzenie wejścia „x” przez „OK” spowoduje przejście programu
na wyjście Q1,
−
Wcisnąć „
↓” aby przejść do wyjścia Q2 i wprowadzić dalszą część
programu analogicznie.
Laboratorium Aparatów Elektrycznych @KEMOR
28
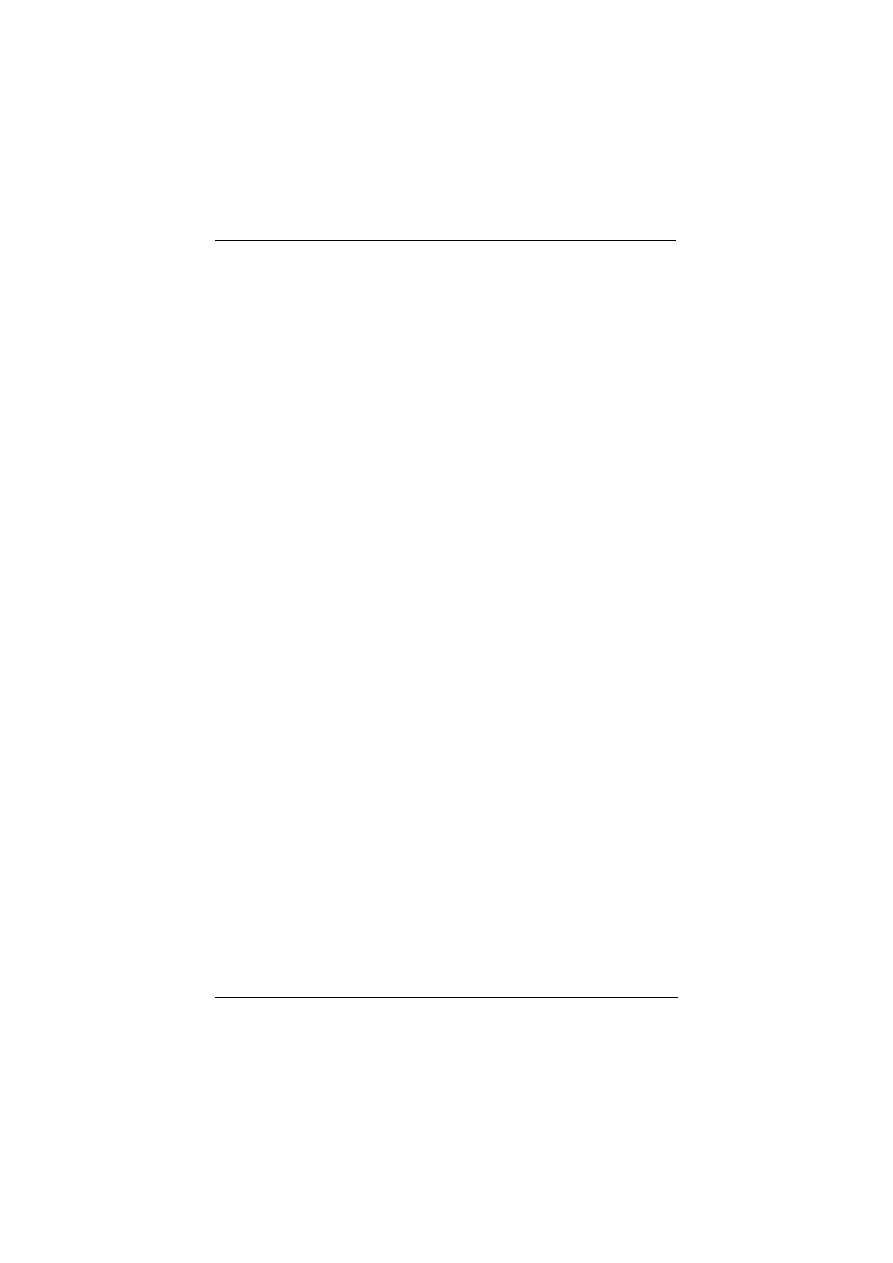
2.1.4. Opis działania
Naciśnięcie S1 – załączenie lewych obrotów rotora
Naciśnięcie S2 – załączenie prawych obrotów rotora
Naciśnięcie S3 – wyłączenie silnika
I1 lub I2
B01, Q1
lub
B03, Q2
I3
Załącz
Wyłącz
Podanie impulsu I1 (lub I2) na wejście bloku B01 (lub B03) spowo-
duje pojawienia się stanu 1 na wyjściu bloku B01 (lub B03), a zatem załą-
czenie przekaźnika Q1 (lub Q2), który z kolei poprzez stycznik K1 (lub K2)
załączy silnik do sieci zasilającej.
Impuls I3 (wyłączenie silnika) powoduje bezwarunkowe ustawienie
wyjścia bloku B01 w stan 0 (lub B03) poprzez blok B02 (lub B04).
Blok B02 (lub B04) spełnia rolę zabezpieczenia silnika przed załą-
czeniem dwóch styczników jednocześnie, w przypadku popełnienia błędu
obsługi. Stan 1 na wyjściu Q1 automatycznie powoduje wyłączenie wyjścia
Q2 poprzez bloki B04 i B03.
2.1.5. Program w LOGO!
Q1
Q2
B01
RS
S
R
≥1
B02
B03
RS
S
R
≥1
B04
I1
Q2
I3
x
I2
Q1
I3
x
Lewo
Prawo
Zał. Lewe
Zał. prawe
Wyłącz
Wyłącz
Laboratorium Aparatów Elektrycznych @KEMOR
29
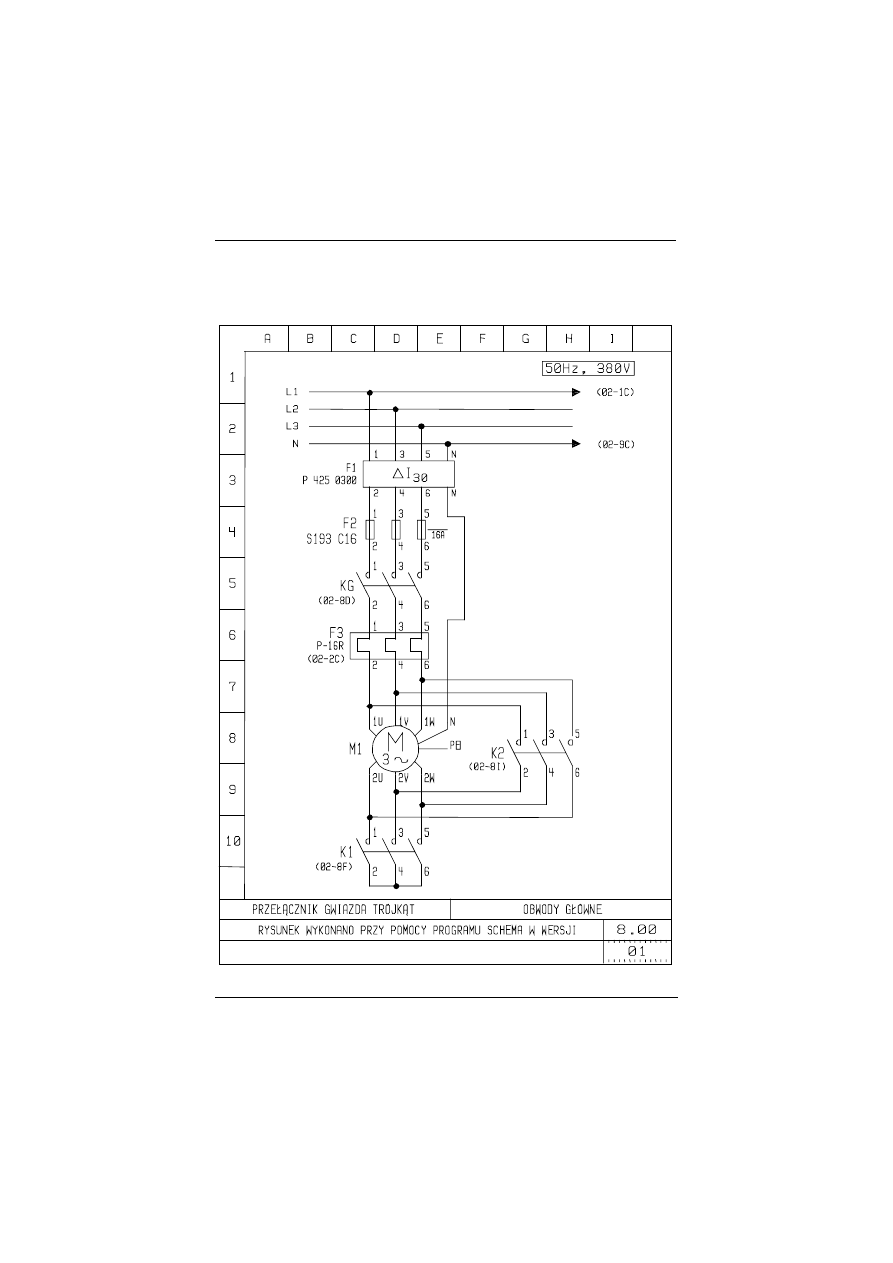
2.2. PRZEŁĄCZNIK „GWIAZDA – TRÓJKĄT
2.2.1. Obwody siłowe
Laboratorium Aparatów Elektrycznych @KEMOR
30
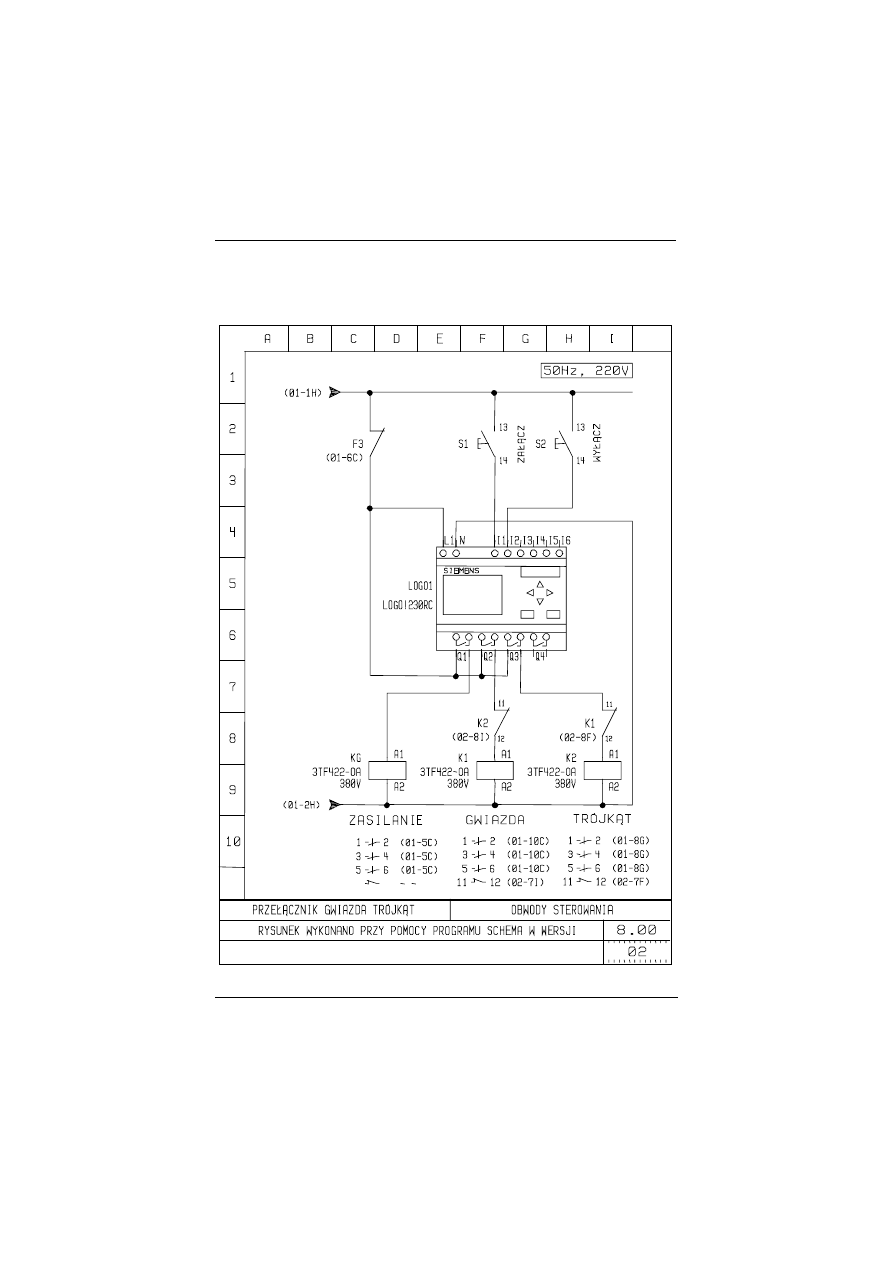
2.2.2. Obwody sterowania
Laboratorium Aparatów Elektrycznych @KEMOR
31
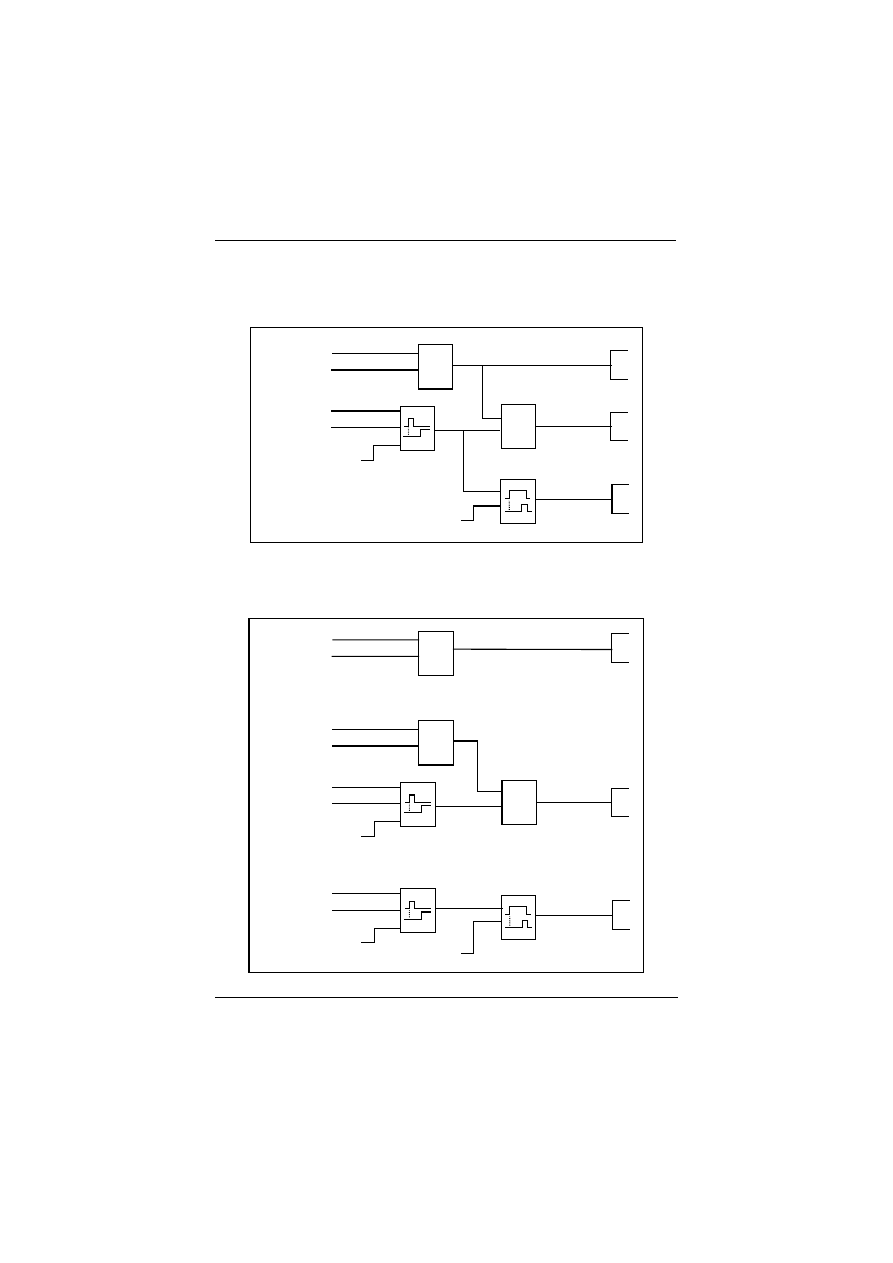
2.2.3. Program w LOGO!
B02
RS
S
R
I1
I2
Q1
Zasilanie
Załącz
Wyłącz
=1
B01
B03
Trg
R
T
B04
Trg
T
Q2
Gwiazda
Q3
Trójkąt
00.50
s +
05.00
s +
I1
I2
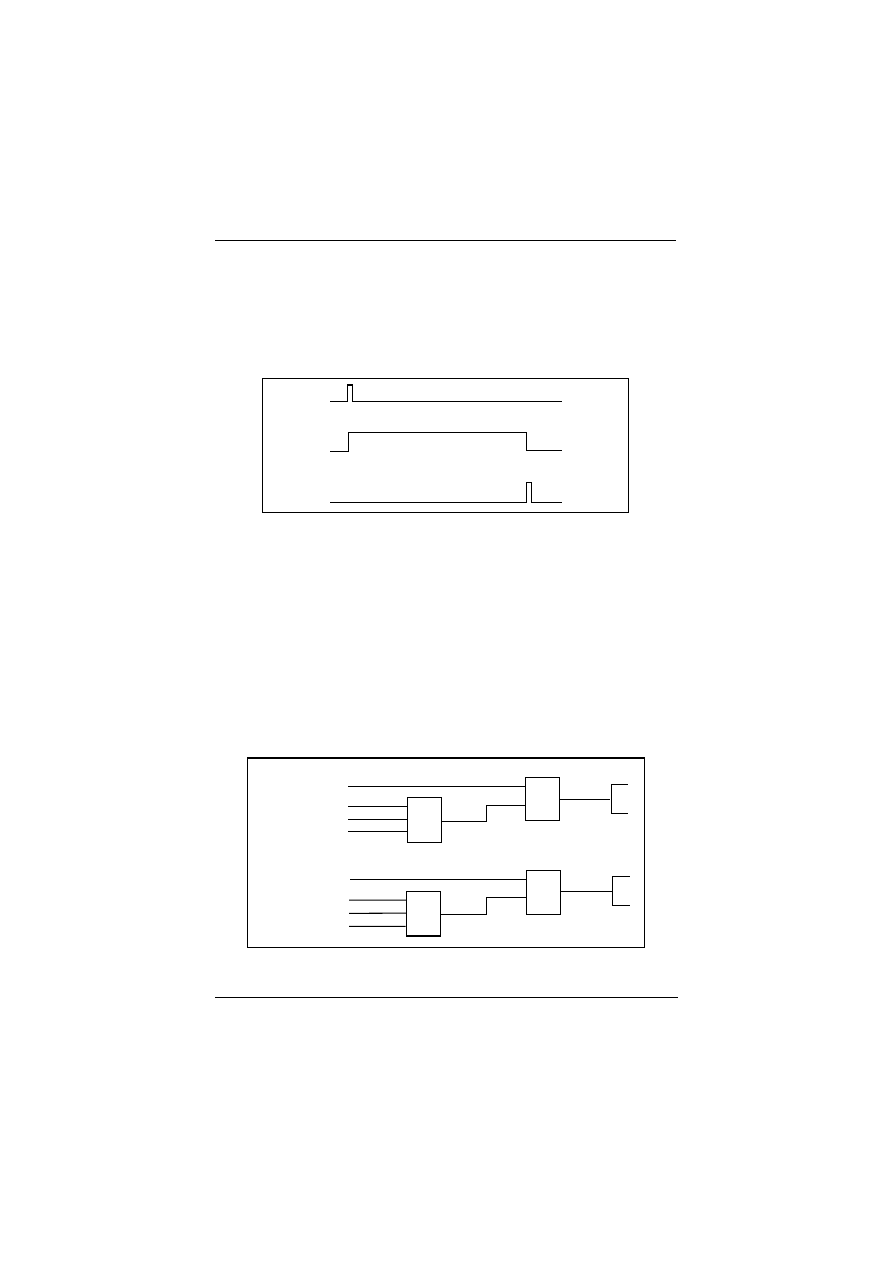
2.2.4. Schemat ideowy układu w LOGO!Soft
B02
RS
S
R
I1
I2
Q1
Zasilanie
=1
B01
B03
Trg
R
T
B04
Trg
T
Q2
Gwiazda
Q3
Trójkąt
00.50
s +
05.00
s +
I1
I2
B02
RS
S
R
I1
I2
Załącz
Wyłącz
B03
Trg
R
T
05.00
s +
I1
I2
Laboratorium Aparatów Elektrycznych @KEMOR
32
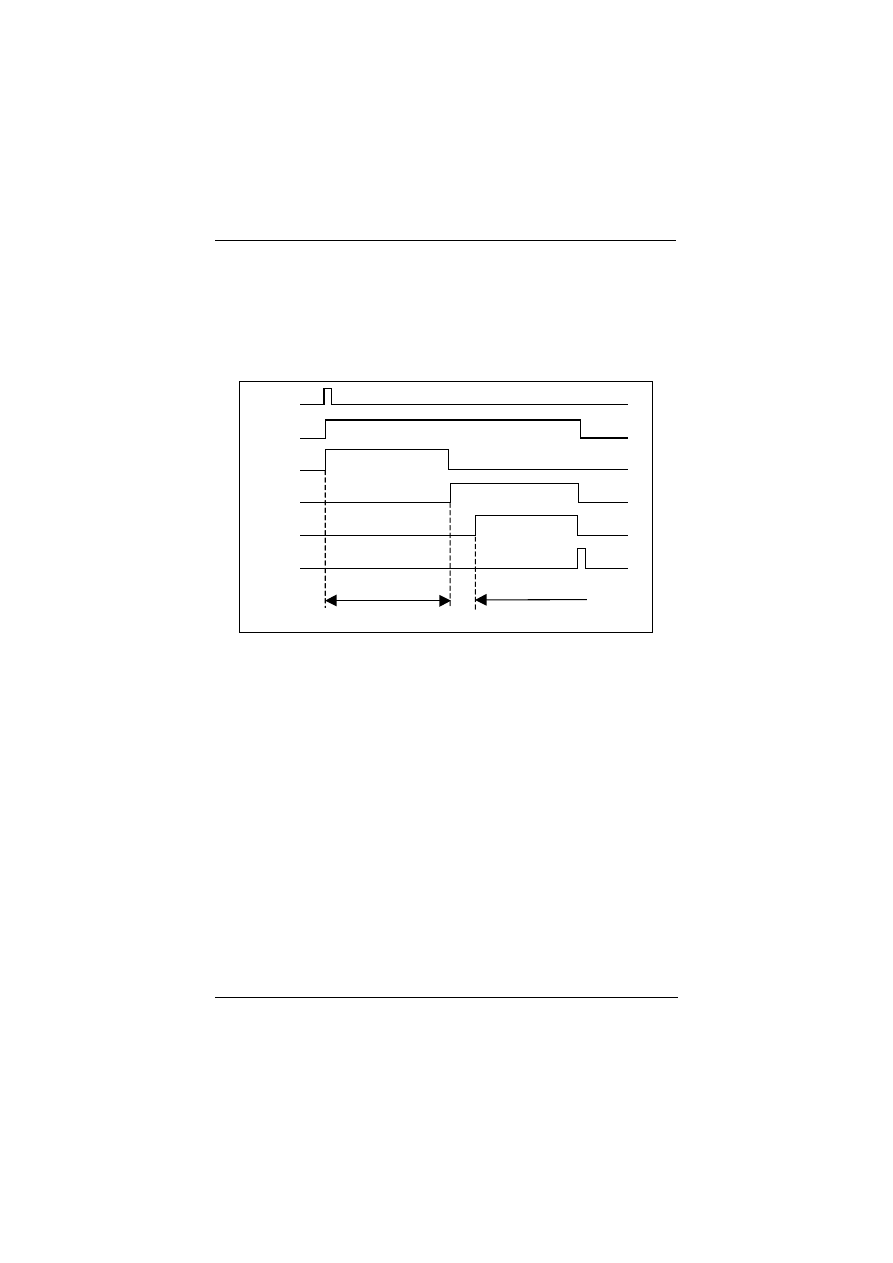
2.2.5. Opis działania
Naciśnięcie S1 – załączenie przełącznika Y -
∆
Naciśnięcie S2 – wyłączenie przełącznika Y -
∆
I1
B02, Q1
B01, Q2
B03
B04, Q3
I2
5,0 s na
przełączenie Y-
∆
0,5 s opóźnienia
załączenia
∆
Zał. S1
Wył. S2
Podanie impulsu na blok B02 – I1 (poprzez przycisk S1) powoduje
przejście bloków B02 i B03 w stan zadziałania (B02 – wyjście stan 1, wyj-
ście B03 przejdzie w stan 1 po upływie 5,0s).
Stan 1 na wyjściu B02 powoduje załączenie przekaźnika Q1 i załą-
czenie silnika do sieci zasilającej.
Wejście pierwsze B01 – stan 1 oraz wejście drugie B01 – stan 0 po-
woduje załączenie (w tej samej chwili co Q1) Q2, czyli załączenie silnika
w gwiazdę.
Po upływie 5,0s wyjście B03 przyjmuje stan 1, który spowoduje, że
na wyjściu B01 wystąpi stan 0 i wyłączy wyjście Q2 (gwiazda). W tej samej
chwili pojawi się na wejściu B04 (Trg) stan 1. Po upływie 0,5s stan na wyj-
ściu B04 przejdzie w stan 1 i załączy wyjście Q3 (trójkąt).
Naciśnięcie przycisku S2 – podanie resetującego impulsu na B02
i B03, który w każdym momencie pracy układu spowoduje wyłączenie.
Laboratorium Aparatów Elektrycznych @KEMOR
33
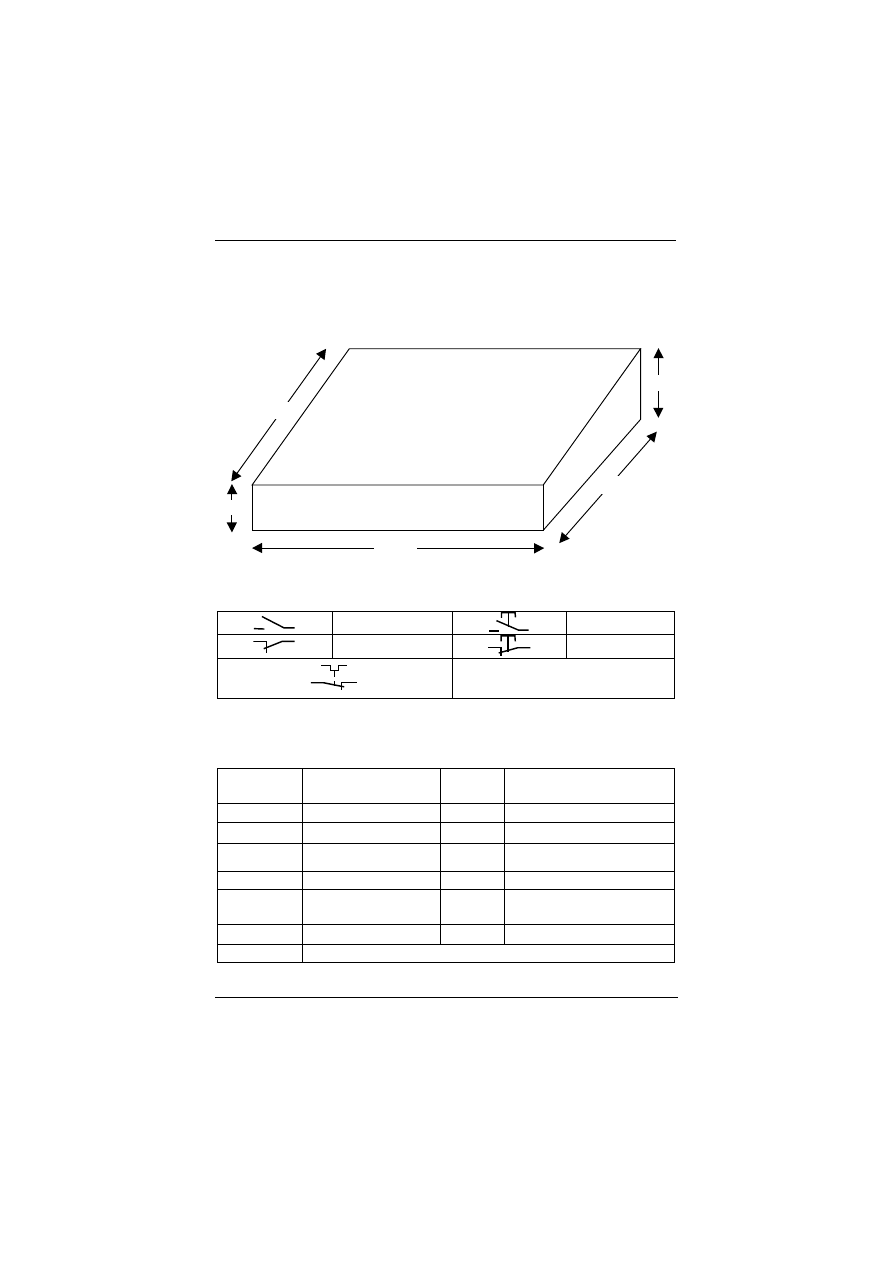
3. STANOWISKO
BADAWCZE
3.1. WYMIARY
1300
150
700
670
300
PŁYTA CZOŁOWA
3.2. SYMBOLE
Styk zwierny
Załącz
Styk rozwierny
Wyłącz
Styk rozwierny termobimetalu
3.3. OZNACZENIA
L1, L2, L3
Oznaczenia przewo-
dów fazowych
I1
÷I6
Wejścia LOGO
1, 3, 5
Wejścia
Q1
÷Q6
Wyjścia LOGO
2, 4, 6
Wyjścia
K
Stycznik
N
Przewód neutralny
A1, A2
Cewka stycznik
PE
Przewód ochronny
F2
Bezpiecznik instalacyjny
1U, 1V, 1W Wejścia silnika
F3
Wyłącznik termobimeta-
lowy
2U, 2V, 2W Wyjścia silnika
S1
÷S4
Przyciski
F1
Wyłącznik różnicowoprądowy
Laboratorium Aparatów Elektrycznych @KEMOR
34
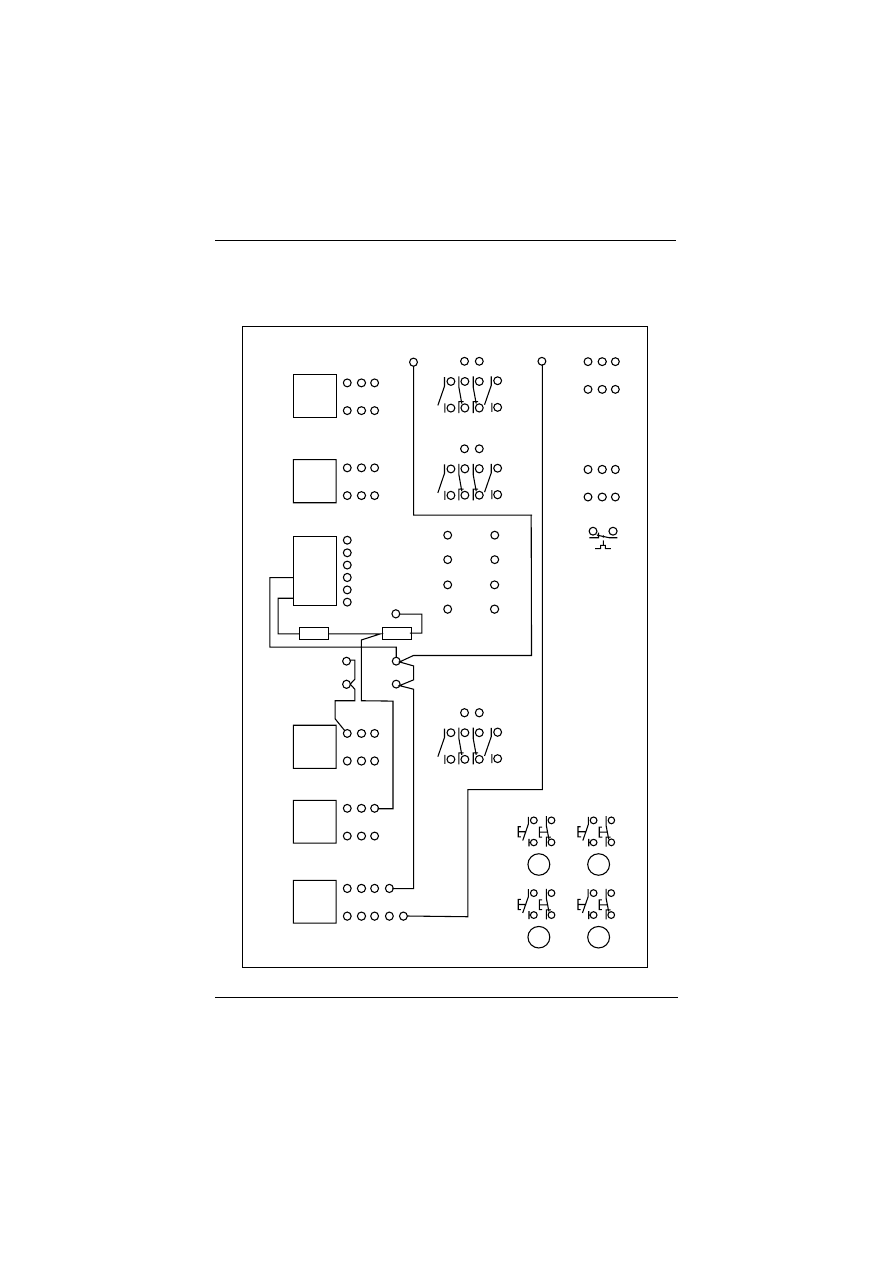
3.4. PŁYTA CZOŁOWA
I1
I2
I3
I4
I5
I6
L
OGO
0 1
2
A1
A2
S1
F2
1
3
5
2
4
6
F1
L1
–
1
L2
–
3
L3
–
5
N - N
PE
2
4
6
N
KG
1
3
5
2
4
6
K1
1
3
5
2
4
6
K2
1
3
5
2
4
6
S2
S4
S3
A1
A2
A1
A2
1
Q2
N
1
Q4
N
1
Q1
N
1
Q3
N
1U
1V
1W
2U
2V
2W
1
3
5
2
4
6
F3
2
N
N
N
PE
0 1
2
L1
N
Laboratorium Aparatów Elektrycznych @KEMOR
35
3.5. WYKAZ
ELEMENTÓW
1. Moduł logiczny LOGO 230RC (LOGO)
2. Wyłącznik różnicowoprądowy (F1) – P 425 0300
3. Bezpieczniki instalacyjne (F2) – S193 C16
4. Styczniki „Siemens” (K) – 3TF 422 – OA 16A 3szt.
5. Wyłącznik termobimetalowy (F3) – P–16R
6. Wyłącznik monostabilny - 4 szt.
7. Wyłącznik kołyskowy – 2 szt.
8. Zaciski laboratoryjne
9. Szyna instalacyjna 35 mm
10. Przewód elektryczny
φ 1,5 mm
11. Koszulki termokurczliwe.
4. PROGRAM
ĆWICZENIA
Połączyć układy siłowe, sterowania i zaprogramować LOGO! według
punktu 2 opracowanego ćwiczenia.
Laboratorium Aparatów Elektrycznych @KEMOR
36
ĆWICZENIE NR II
BADANIE EASY

Laboratorium Aparatów Elektrycznych @KEMOR
37
1. WIDOK
EASY
1
2
4
5
3
6
1 – Zasilanie
2 – Wejścia cyfrowe, analogowe
3 – Wyświetlacz
4 – Klawiatura
5 – Złącza do karty pamięci lub komputera PC
6 – Wyjścia cyfrowe
2. TYPY
EASY
„Easy” jest to elektroniczny przekaźnik sterujący z funkcjami lo-
gicznymi, czasu, liczenia oraz zegara sterującego. Przeznaczony jest jako
urządzenie programowalne przełączalne i sterujące. Instaluje się go jako
Laboratorium Aparatów Elektrycznych @KEMOR
38
zamiennik w układach sterowania przekaźnikowo-stykowego. „Easy” ma
wyjścia sterujące i wejścia kontrolne. Doskonale spełnia zadania zarówno
z zakresu instalacji domowych jak i sterowania maszyn i urządzeń.
Aktualnie oferowane są dwie grupy „easy”:
dla 24V prądu stałego: EASY 412-DC-R oraz EASY 412-DC-RC,
dla 230V prądu przemiennego: EASY 412-AC-R oraz EASY 412-AC-RC.
Typy urządzeń z oznaczeniem „...-RC” zawierają dodatkowo cztery tygo-
dniowe zegary sterujące z czterema różnymi czasami włączania i wyłącza-
nia.
Do urządzeń z oznaczeniem „...–DC...” można podłączyć dwa sygnały
analogowe i analizować ich wartości za pomocą ośmiu komparatorów ana-
logowych.
Chcąc zaprogramować „easy” za pomocą komputera PC, to należy zasto-
sować program EASY-SOFT. Pozwala on utworzyć, zasymulować i za-
chować schemat na komputerze PC.
TYP
WEJŚCIA
WYJŚCIA
OSOBLIWOŚĆ
EASY 412-DC-R
EASY 412-DC-RC
8 cyfrowych,
24V DC
4 przekaźniki,
max. 8 A
2 wejścia analogowe
0..10V, typ –RC z
zegarem czasu rze-
czywistego
EASY 412-AC-R
EASY 412-AC-RC
8 cyfrowych,
230 V AC
4 przekaźniki,
max. 8 A
Typ –RC z zegarem
czasu rzeczywistego
3. INSTALACJA
EASY
Instalację ,,easy” należy wykonać w następującej kolejności:
1.
Montaż
,,Easy” należy zamontować w takim miejscu aby zaciski napięcia za-
silającego były chronione podczas pracy przed bezpośrednim dotknięciem.
Należy pamiętać o zachowaniu odstępu co najmniej 3 cm od ściany lub są-
siednich aparatów w celu ułatwienia podłączenia przewodów.
2.
Podłączenie napięcia zasilającego
,,Easy”–DC zabezpieczone jest przed zmianą biegunowości napięcia
zasilania.
Laboratorium Aparatów Elektrycznych @KEMOR
39
Żeby ,,easy” działało, należy zapewnić prawidłową polaryzację na-
pięcia zasilania.
Zabezpieczyć obwód zasilania bezpiecznikiem (F1) o prądzie nomi-
nalnym co najmniej 1A (T).
3.
Podłączenie przewodów do wejść
Do zacisków wejściowych ,,easy” - DC I1 do I8 można podłączyć
przyciski, łączniki, 3 lub 4
−przewodowe czujniki zbliżeniowe. Z powodu
dużego prądu spoczynkowego nie stosować 2
−przewodowych czujników
zbliżeniowych.
+24V
0V I1 I2
I7
24 VDC
0V
1
2
Q1
1
2
Q2
1
2
Q3
1
2
Q4
K1
K2
K3
K4
F1
S1
S2
S7
F2
WYJŚCIA CYFROWE
WEJŚCIA CYFROWE
+24VDC
–24VDC
Schemat podłączenie sterownika „EASY”
Zakresy napięć dla sygnałów wejściowych:
Sygnał „ WYŁ”: 0V...5V
Sygnał „ZAŁ”: 15V... 28,8V
Prądy wejściowe:
I1-I6: 3,3mA przy 24V
I7-I8: 2,2mA przy 24V
Laboratorium Aparatów Elektrycznych @KEMOR
40
Podłączenie wejść analogowych.
Do wejść I7 i I8 można podłączyć również napięciowe sygnały ana-
logowe w zakresie 0V do 10V.
4.
Podłączenie przewodów do wyjść
Do wyjść „easy” można podłączyć takie obciążenia jak np. świe-
tlówki. żarówki, styczniki, przekaźniki lub silniki.
W przeciwieństwie do wejść obciążenia dołączone do wyjść mogą być za-
silane z różnych faz, w przypadku zasilania 230V
AC.
4.
FUNKCJE STEROWNIKA EASY
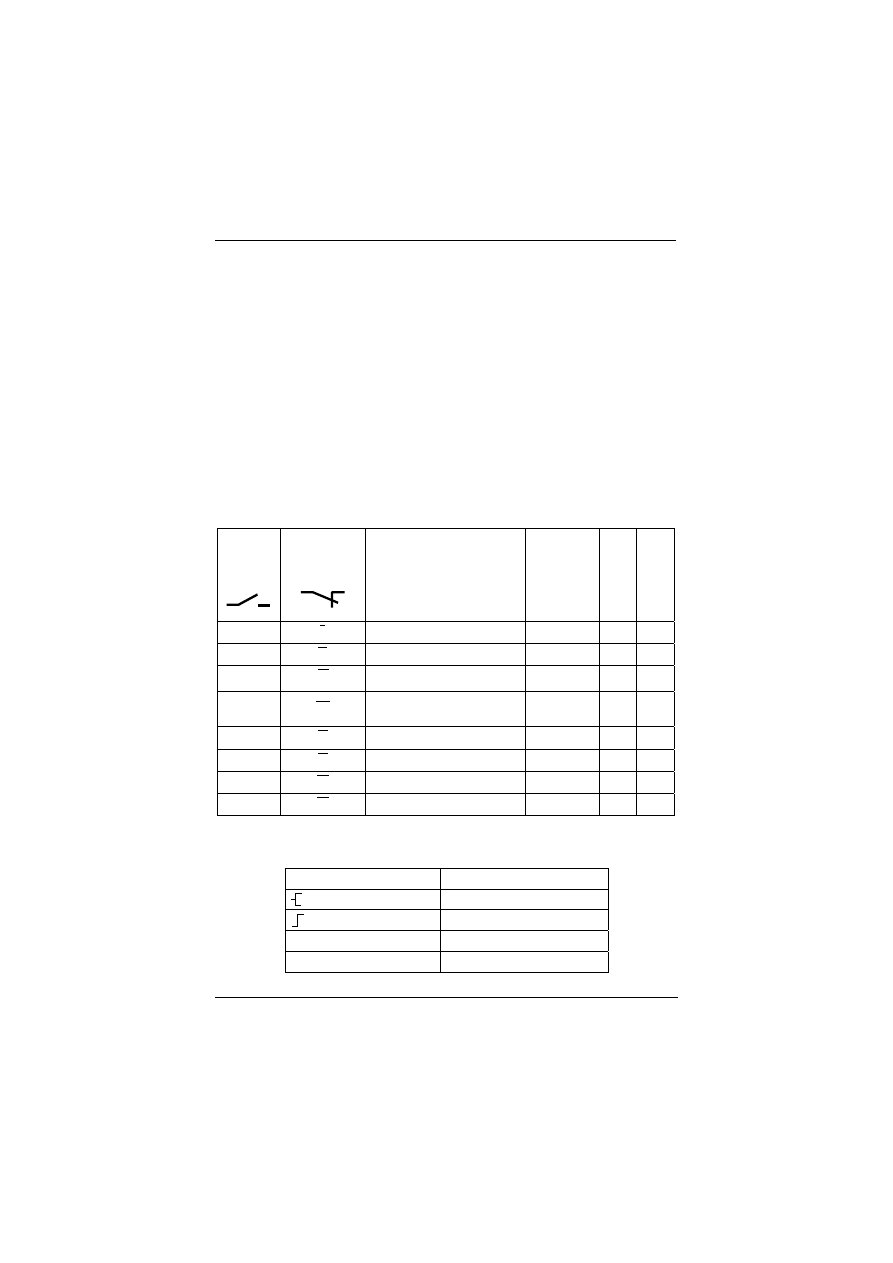
4.1. WYKAZ STYKÓW I PRZEKAŹNIKÓW
Styk
zwierny
Styk roz-
wierny
Opis styku
Zakres
Cew
k
a
P
ara
m
et
ry
I
I
Zacisk wejściowy
I1..I8
-
-
P
P
Przycisk kursora
P1..P4
-
-
Q
Q
Przekaźnik wyjściowy
Q1..Q4
x
-
M
M
Przekaźnik pomocniczy
(Marker – znacznik)
M1..M16
x
-
C
C
Licznik
C1..C8
x
x
T
T
Przekaźnik czasowy
T1..T8
x
x
Zegar sterujący
1.. 4
-
x
A
A
Komparator analogowy
A1..A8
-
x
4.2. TYPY
CEWEK
Funkcja (typ) cewki
Opis
Q1
Cewka zwykła
Q1
Cewka bistabilna
SQ1
Cewka zatrzaskowa
RQ1
Cewka zwalniająca
Laboratorium Aparatów Elektrycznych @KEMOR
41
Wyświetlenie zestawu parametrów poprzez punkt menu „PARA-
METR”:
+ możliwe
- zablokowane
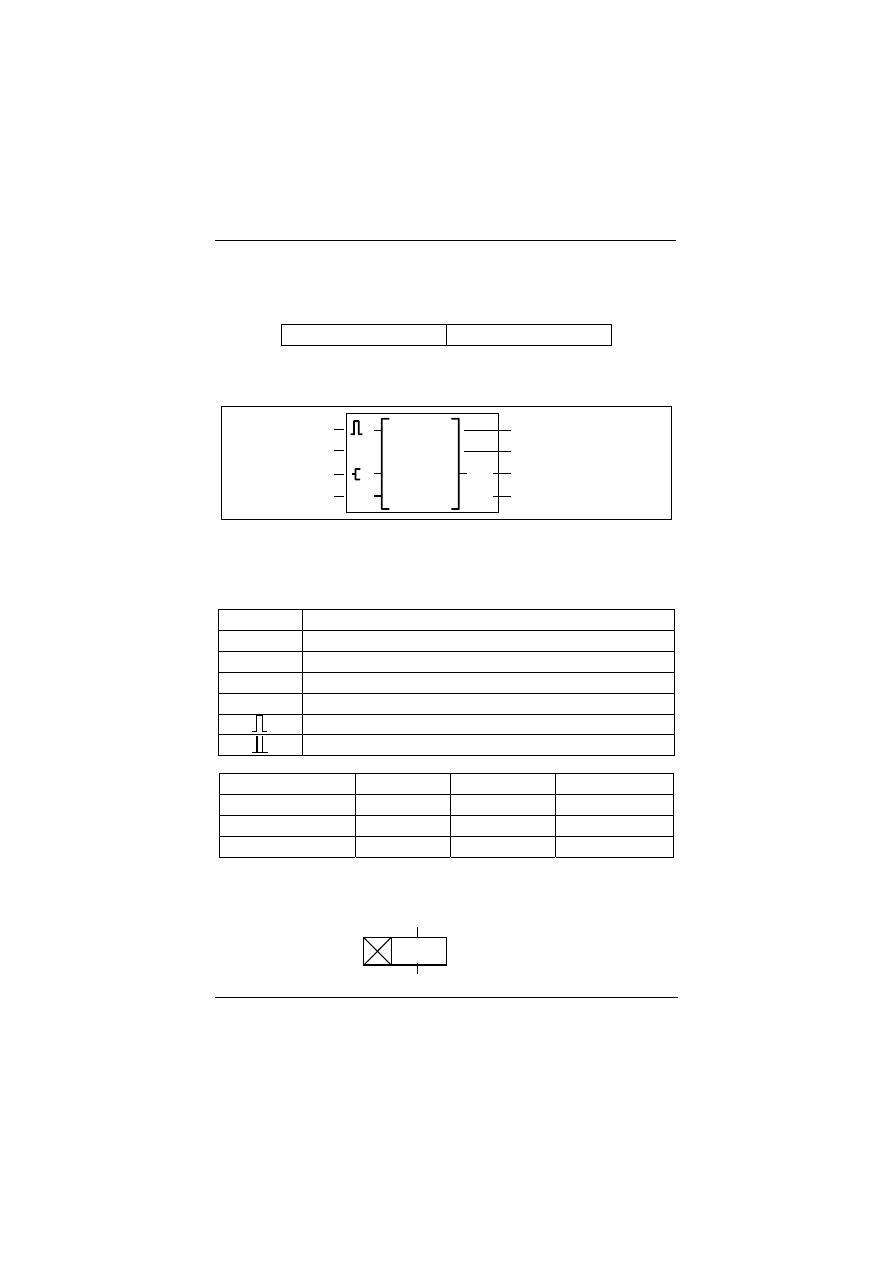
4.3. PRZEKAŹNIK CZASOWY
00.00
30.00
TRG
RES
S
+
T1
Bieżący czas
Nastawa czasu 10ms
÷100h
Nr przekaźnika
Wskaźnik dostępu
Funkcja
Jednostka czasu
Cewka wyzwalania
Cewka kasowania
OZNACZENIA:
T1 – Styk przekaźnika,
TT1 – Cewka przekaźnika,
RT1 – Reset cewki przekaźnika
Funkcje
Opis
X
Przekaźnik z opóźnionym załączeniem
?X
Przekaźnik z losowym czasem opóźnionego załączenia
█
Przekaźnik z opóźnionym wyłączeniu
?█
Przekaźnik z losowym czasem opóźnionego wyłączenia
Przekaźnik impulsowy
Przekaźnik migający
Jednostka czasu
Opis
Zakres
Rozdzielczość
S
Sekundy
00.00...99.99
10ms
M:S
Minuty
00.00...99.59
1s
H:M
Godziny
00.00...99.59
1min
4.3.1. PRZEKAŹNIK CZASOWY O STAŁYM LUB LOSOWO
ZMIENNYM CZASIE OPÓŹNIONEGO PRZYCIĄGANIA
X
?X
Laboratorium Aparatów Elektrycznych @KEMOR
42
t
t
t
TRG
RES
STYK
Przekaźnik łączy styk po odliczeniu zadanego czasu zwłoki. Jeśli wybie-
rzemy funkcję przekaźnika czasowego o zmiennym losowo czasie opóźnio-
nego przyciągania to, „easy" wybiera przypadkowy czas zwłoki (t) zawie-
rający się pomiędzy zerem i nastawionym czasem.
Zastosowanie:
• Przenośniki taśmociągowe załączane z opóźnieniem,
• rozpoznawanie braku sygnału z czujnika w przypadku jego usterki,
• sterowanie rolet z przypadkową kolejnością załączania.
4.3.2. PRZEKAŹNIK CZASOWY O STAŁYM LUB LOSOWO
ZMIENNYM CZASIE OPÓŹNIONEGO ODPADANIA
?
t
t
TRG
RES
STYK
Laboratorium Aparatów Elektrycznych @KEMOR
43
Przekaźnik zamyka styk natychmiast po pobudzeniu, a odpada po odlicze-
niu czasu.
Jeśli wybierzemy funkcję przekaźnika czasowego o zmiennym losowo cza-
sie opóźnionego odpadania to ,,easy” wybiera przypadkowy czas zwłoki
zawierający się pomiędzy zerem i nastawionym czasem.
Zastosowanie:
• Uaktywnienie wybiegu silników lub zwalniaków.
• Sterowanie oświetleniem z przypadkową kolejnością łączenia w razie
nieobecności.
4.3.3. PRZEKAŹNIK CZASOWY, IMPULSOWY
t
t
t
TRG
RES
STYK
Przekaźnik zamyka styk na czas trwania impulsu niezależnie od długości
sygnału wyzwalającego.
Zastosowanie:
• Formowanie sygnałów na zadany czas trwania impulsu bez względu na
czas sygnału z czujnika.
4.3.4. PRZEKAŹNIK CZASOWY, MIGAJĄCY
Laboratorium Aparatów Elektrycznych @KEMOR
44
t
TRG
RES
STYK
t
t
Przekaźnik na przemian zamyka i otwiera styk łączenia z częstotliwością
zależną od nastawy czasu.
nastawy
czas
2
1
migania
Czestot.
⋅
=
Gdy czas nastawy wynosi zero to częstotliwość migania zależy od czasu
cyklu, który jest zmienny i zależy od długości programu.
Zastosowanie:
• Sterowanie lamp ostrzegawczych.
4.4. LICZNIK
0230
DIR
CNT
RES
+
C1
Wartość bieżąca
Nr licznika
Wskaźnik dostępu
Nastawa progu
Cewka kierunku
Cewka licząca
Cewka kasowania
OZNACZENIA:
C1 – Styk przekaźnika,
CC1 – Cewka licznika,
RC1 – Reset cewki,
DC1 - Kierunek
Laboratorium Aparatów Elektrycznych @KEMOR
45
Parametr
Funkcja cewki
Znaczenie
DIR
D
Kierunek zliczania:
DCx = ”0”: liczenie wprzód
DCx = ”1”: liczenie wstecz
CNT
C
Impuls Liczący
RES
R
Kasowanie
CCx
DCx
RCx
Cx
0 1
2 3
5
7
4
6
8
A
B
C
D
4.5. ZEGAR
STERUJĄCY
MO
01:00
--:--
--:--
+
A
Nr zegara
Kanał (A, B, C, D)
Wskaźnik dostępu
Dni tygodnia od-do
Czas
Czas włączenia
Czas wyłączenia
ON
OFF
1
OZNACZENIA:
1 – Styk zegara sterującego
Laboratorium Aparatów Elektrycznych @KEMOR
46
Parametr
Znaczenie
Możliwe ustawienia
Dni tygodnia
Poniedziałek do niedzieli
MO, DI, MI, DO, FR,
SA., SO
Czas włączenia
Godziny : Minuty
brak czasu łączenia przy „--:--”
00 : 00 do 23 : 59, --:--
Czas wyłącze-
nia
Godziny : Minuty
brak czasu łączenia przy „--:--”
00 : 00 do 23 : 59, --:--
4.6. KOMPARATOR
ANALOGOWY
ANALOG
≤
+
A1
Nr komparatora
Wskaźnik dostępu
Wartość rzeczywista
Wejście I7
Warunek porównania
Wejście I8
I7
I8
8.0 V
4.2 V
ANALOG
≥
+
A1
Nr komparatora
Wskaźnik dostępu
Wartość rzeczywista
Wejście I7/I8
Warunek porównania
Wartość zadana
I7
3.2
8.0 V
OZNACZENIA:
A1 – Styk komparatora analogowego
5. PODSTAWY
PROGRAMOWANIA
Wartości w tablicy logicznej, dla styków oznaczają
0 = zwiemy otwarty, rozwierny zamknięty
1 = zwiemy zamknięty, rozwierny otwarty
dla cewek przekaźników „Qx"
0 = cewka nie wzbudzona
1 = cewka wzbudzona
Laboratorium Aparatów Elektrycznych @KEMOR
47
5.1. NEGACJA
Negacja oznacza, że styk przy uruchomieniu nie zamyka lecz otwiera
(funkcja NOT).
W przykładzie programu dla „easy” przy styku „I1” , przyciskiem ALT
zmienia się styk rozwierny na zwierny.
Tablica logiczna
I1
Q1
0
1
1
0
1
I
Q1
5.2. SAMOPODTRZYMANIE
Kombinacja połączeń szeregowych i równoległych realizuje nam układ sa-
mopodtrzymujacy.
Samopodtrzymanie jest uzyskiwane przez styk ,,Q1” , który połączony jest
równolegle do ,,I1”.
Gdy,,I1” zostanie zamknięty i znowu się otworzy , ,,Q1” podtrzymuje sy-
gnał tak długo, aż otworzy się ,,I2”. S1 zwierny na ,,I1” S2 rozwierny na
,,I2”.
Tablica logiczna
I1
I2
Styk Q1
Cewka Q1
0
0
0
0
1
0
0
0
0
1
0
1
1
1
0
1
1
0
1
0
0
1
1
1
1
1
1
1
Laboratorium Aparatów Elektrycznych @KEMOR
48
S1 zwieramy na ”I1”
S2 rozwieramy na ”I2”
I1
Q1
I2
Q1
Samopodtrzymanie może być realizowane alternatywnie, z zachowaniem
kontroli przerwania przewodu na przekaźniku zatrzaskującym z wykorzy-
staniem cewek zatrzaskującej i zwalniającej.
I1
SQ1
2
I
RQ1
Gdy ,,I1” zostanie włączony, cewka ,,Q1” zatrzaśnie się. ,,I2” neguje sygnał
otwierania z S2 i przełączy dopiero, gdy rozłączy S2 w celu wyłączenia ma-
szyny. Wyłączenie wystąpi równie w przypadku przerwania przewodu.
Należy zachować kolejność , w której obydwie cewki są połączone w pro-
gramie „easy”.
Najpierw połączyć cewkę ,S”, następnie cewkę ,,R”. Pomimo że ,I1” może
być nadal włączone, to przy zadziałaniu,,I2” maszyna zostanie wyłączona.
Układ samopodtrzymujacy jest stosowany do włączania i wyłączania ma-
szyn. Maszyna zostaje włączona przez styk zwierny S1, wyłączona przez
styk rozwierny S2, który przerywa połączenie dla napięcia sterującego i
wyłącza maszynę. Daje to pewność, że maszyna wyłączy się również
w przypadku zerwania przewodu. „I2" w stanie spoczynku jest zawsze
zwarty.
5.3. ZESTYK
TRWAŁY
Ażeby cewkę przekaźnika trwale pobudzić, należy wykonać jedno połącze-
nie przez wszystkie pola stykowe, zaczynając od cewki i przesuwając kur-
sor w lewo do pierwszego pola stykowego.
Laboratorium Aparatów Elektrycznych @KEMOR
49
Tablica logiczna
...
Q1
1
1
Q1
5.4. PRZYKŁAD WYKORZYSTANIA PRZEKAŹNIKA CZASO-
WEGO
ZAŁOŻENIE
Wyjście ”Q1” załącza się po czasie 1,5 min., ”I1” wyzwala ”T2”, natomiast
”I2” wyłącza Q1.
PROGRAMOWANIE PRZEKAŹNIKA CZASOWEGO
♦ Zastosowanie przekaźnika w programie wymaga przynajmniej dwóch
zapisów: w polu styków styk „T2” w polu cewek cewkę wyzwalania
„TT2”.
Cewkę kasowania „RT2” można wykorzystywać w miarę konieczności.
♦ Wybrać numer styku „T2” i nacisnąć OK.
Wyświetlony zostanie zestaw parametrów przekaźnika czasowego „T2”.
Wstawić funkcję przekaźnika.
RES
01.50
M:S
TRG
OK
Zestaw
parametrów
T2
X
I1
TT2
I2
T2
RT2
Q1
Laboratorium Aparatów Elektrycznych @KEMOR
50
5.5. PRZYKŁAD WYKORZYSTANIA LICZNIKA
ZAŁOŻENIE
Wyjście ”Q1” załącza się po 5 impulsach. Pola połączyć od lewej do pra-
wej.
”I1” impuls liczący, ”I2” kasuje licznik, ”I3” zmienia kierunek.
PROGRAMOWANIE LICZNIKA.
♦ Zastosowanie licznika w programie wymaga przynajmniej dwóch za-
pisów: jednego w polu styków, styk „C1”, drugiego w polu cewek,
cewkę „CC1”.
Cewki „RC1” i „DC1” mogą być w programie nie wykorzystywane.
♦ Wybrać styku „C1” i nacisnąć OK.
Wyświetlony zostanie zestaw parametrów licznika „C1”.
RES
CNT
0005
DIR
OK
C1
Zestaw
parametrów
I1
CC1
I3
C1
DC1
Q1
I2
RC1
5.6. SAMOWYŁĄCZENIE STYCZNIKA
Przedstawiony układ programu ,,easy” ma na celu wyłączenie stycznika
(Q1), która następuje po zadanym czasie. ,,I1” załącza przekaźnik ,,Q1”
a ,,S” zatrzaskuje go. Po ustalonym czasie ,,T1” przekaźnik ,,Q1” zostaje
rozłączony. Można też rozłączyć ,,Q1” nie czekając na upłynięcie czasu
,,T1” przez zacisk ,,I2”
I1
SQ1
Q1
I2
T1
RQ1
TT1
RQ1
Laboratorium Aparatów Elektrycznych @KEMOR
51
ĆWICZENIE NR III
BADANIE STYCZNIKA
Laboratorium Aparatów Elektrycznych @KEMOR
52
1. WIADOMOŚCI TEORETYCZNE
1.1. STYCZNIKI,
ZASADA
DZIAŁANIA I ZASTOSOWANIE
Stycznikiem nazywamy odłącznik, którego styki zostają zamykane
i utrzymują się w stanie zamkniętym pod działaniem elektromagnesu sta-
nowiącego integralną część stycznika. Styczniki należą do grupy tych łącz-
ników, które mogą pracować tylko pod prądami roboczymi – nie są w stanie
wyłączać prądów zwarciowych.
Styczniki można podzielić na wiele sposobów. Najczęściej spotyka-
ne kryteria podziału to:
1. Wartość napięcia: styczniki na napięcia do 1000 V prądu przemiennego
i do 1200 V prądu stałego oraz styczniki wysokonapięciowe na napięcia
1000-10000 V prądu przemiennego i 1200-3000 V prądu stałego.
2. Rodzaj prądu torów głównych: styczniki prądu stałego i styczniki prądu
przemiennego oraz styczniki uniwersalne (prądu stałego
i przemiennego).
3. Rodzaj napędu: styczniki elektromagnesowe (o napędzie elektromagne-
sowym), styczniki pneumatyczne (o napędzie pneumatycznym)
i styczniki elektropneumatyczne (o napędzie elektropneumatycznym).
4. Ośrodek gaszenia łuku – styczniki: próżniowe, olejowe, powietrzne –
które można dodatkowo rozróżniać w zależności od sposobu gaszenia
łuku.
5. Rodzaj torów urządzenia (obwodu), do włączenia w które jest przezna-
czony stycznik: styczniki instalowane w torach głównych urządzenia –
styczniki główne odbiornikowe i styczniki instalowane w torach po-
mocniczych urządzenia – styczniki pomocnicze.
1.2. ZASADA
DZIAŁANIA
Otwieranie styków następuje po przerwaniu obwodu zasilającego
elektromagnes pod działaniem ciężaru zwory i siły sprężyny. Elektroma-
gnes stycznika musi rozwijać wystarczającą siłę, aby po pokonaniu sił sta-
rających się otworzyć styki, zapewnić należyty docisk między stykami.
Układ ruchowy stycznika stanowią zwora elektromagnesu oraz ze-
staw z ruchomymi stykami zestyków podstawowych i pomocniczych.
Po zasileniu uzwojenia elektromagnesu zwora zostanie przyciągnięta
do rdzenia. Podczas zamykania stycznika przesuwane są styki zestyków
podstawowych i pomocniczych oraz naciągane są sprężyny zwrotne
i sprężyny układów stykowych.
Laboratorium Aparatów Elektrycznych @KEMOR
53
Styk zwierny pozostaje w stanie zamkniętym, a styk rozwierny zo-
staje w stanie otwartym tak długo, dopóki uzwojenie elektromagnesu jest
zasilane odpowiednim napięciem.
Przy przestawianiu styków stycznika, mogą one włączać lub wyłą-
czać prądy w
podstawowych i pomocniczych torach prądowych,
a powstający przy manewrach łuk elektryczny jest gaszony za pośrednic-
twem komór łukowych (styczniki do przerywania obwodu bez prądu nie
mają komór łukowych).
1.3. ZASTOSOWANIE
Styczniki są przeznaczone do manewrowania z dużą częstością łą-
czeń silnikami elektrycznymi oraz innymi odbiornikami energii elektrycz-
nej. Możliwości zdalnego sterowania stycznikami, duża trwałość
i sprawność łączeniowa oraz niezawodność działania sprawiają że styczniki
szczególnie nadają się do stosowania we wszystkich układach napędowych
i urządzeń elektroautomatyki.
1.4. BUDOWA
STYCZNIKÓW
Podstawowym i powszechnym w użyciu jest stycznik elektromagne-
sowy. Niezależnie od tego, czy stycznik elektromagnesowy jest jedno- czy
też wielobiegunowy, jedno- lub wieloprzerwowy, o mocowaniu pionowym
czy poziomym, podstawowymi zespołami konstrukcyjnymi są zawsze:
•
podstawa lub korpus;
•
mechanizm napędowy — w tym elektromagnes;
•
tory prądowe główne — w tym człon łączeniowy (styki łączeniowe)
oraz komora gaszeniowa wraz z urządzeniami ułatwiającymi gasze-
nie łuku
•
tory prądowe pomocnicze — w tym człon łączeniowy.
W styczniku z napędem elektromagnesowym lub pneumatycznym
wyróżnia się następujące elementy:
•
części ruchome tj. zwora elektromagnesu wraz z poprzeczką, układ
dźwigni lub krzywek, styki ruchome główne i pomocnicze;
•
części nieruchome tj. podstawa lub korpus, rdzeń i uzwojenie elek-
tromagnesu, przewody obwodu sterowniczego, wsporniki części ru-
chomych, styki nieruchome główne i pomocnicze, końcówki
i elementy przyłączowe oraz zaciski, magnesy i uzwojenia wydmu-
chowe oraz komory.
Laboratorium Aparatów Elektrycznych @KEMOR
54
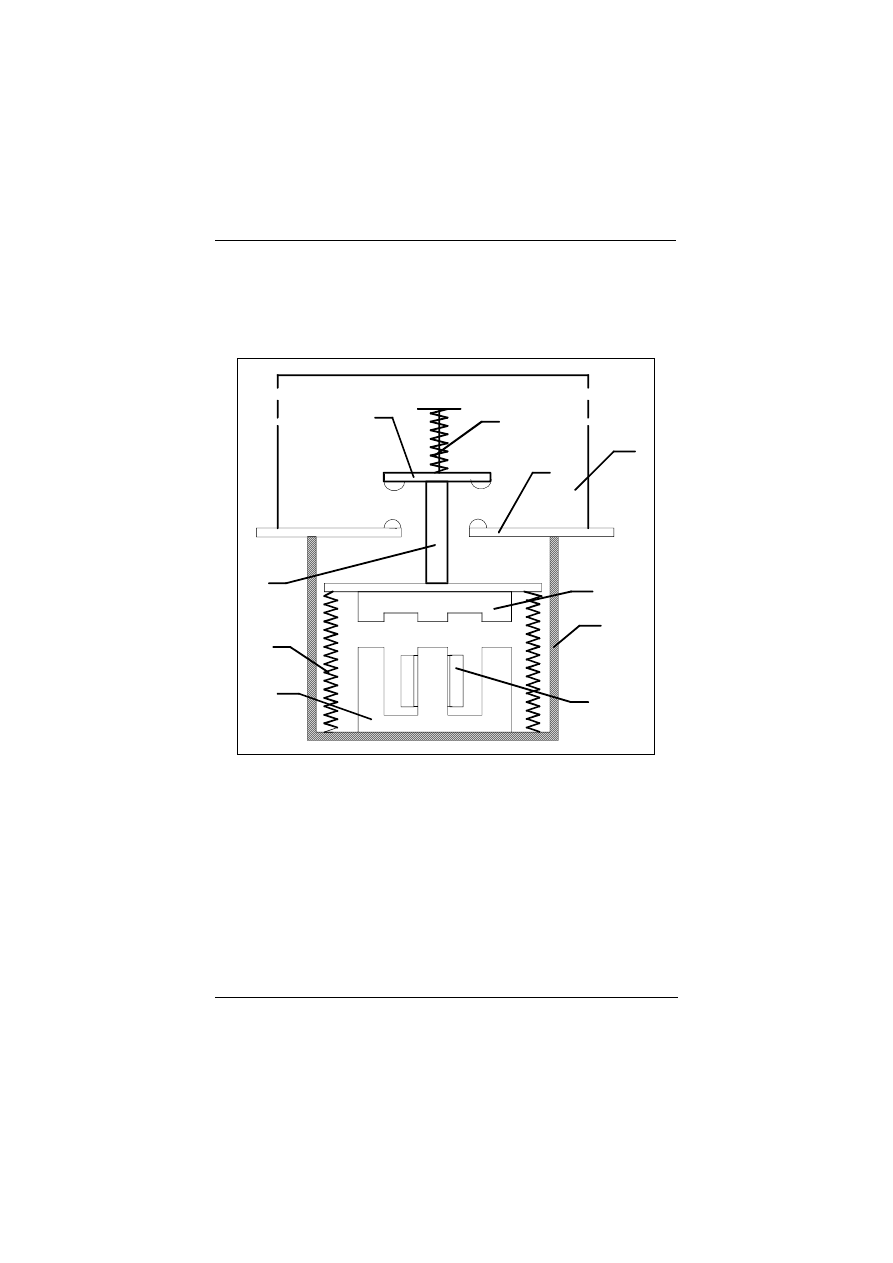
Oczywiście, nie w każdej konstrukcji stycznika spotykamy wszyst-
kie wymienione elementy konstrukcyjne. Przykładem tutaj może być kon-
strukcja stycznika przedstawiona na poniższym rysunku.
1
2
3
4
5
6
7
8
9
10
Przykład stycznika dwuprzerwowego o podstawie poziomej:
1 i 2 — styk ruchomy i nieruchomy,
3 — sprężyna stykowa,
4 — poprzeczka
5 — komora gaszeniowa
6 — zwora elektromagnesu,
7 — uzwojenie napędowe,
8 — sprężyna zwrotna,
9 — rdzeń elektromagnesu,
10 — korpus.
Laboratorium Aparatów Elektrycznych @KEMOR
55
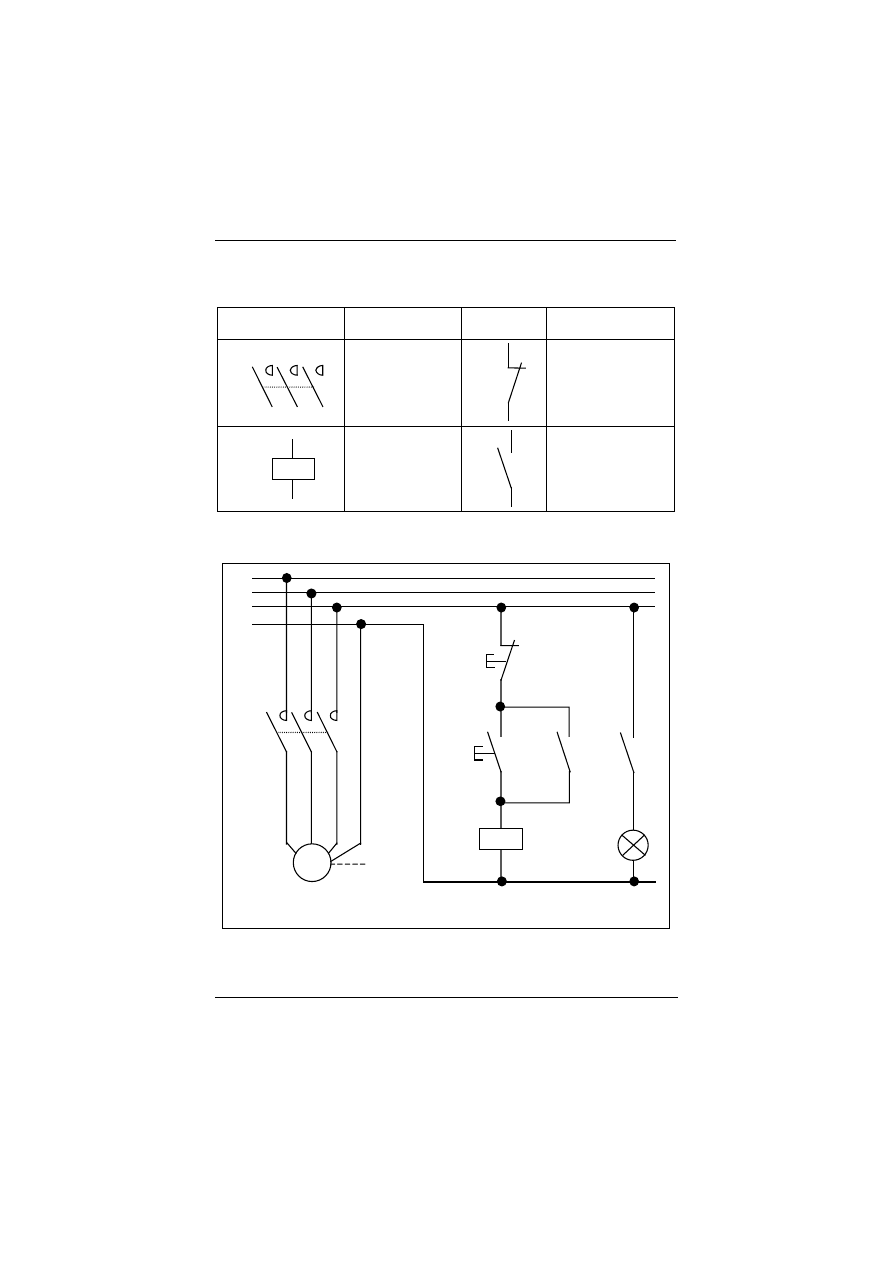
1.5. OZNACZENIA
STYCZNIKA
SYMBOL
OPIS
SYMBOL
OPIS
3
1
5
2
4
6
K1
Zestyki mocy
stycznika
11
12
K1
Zestyki pomocni-
cze rozwierne
stycznika
K1
A2
A1
Cewka stycznika
13
14
K1
Zestyki pomocni-
cze zwierne stycz-
nika
1.6. PODSTAWOWY
UKŁAD ZE STYCZNIKIEM
L1
N
13
14
S2
K1
A2
A1
11
12
S1
13
14
K1
L2
L3
13
14
K1
3
1
5
2
4
6
K1
U
M
3 ~
V W N
PE
M1
Obwód główny
Obwód
sygnalizacji
Obwód
sterowania
Układy styczników z podtrzymaniem stosuje się głównie do załączania sil-
ników, pieców akumulacyjnych oraz innych urządzeń typu załącz – wyłącz.
Laboratorium Aparatów Elektrycznych @KEMOR
56
2. PROGRAM
ĆWICZENIA
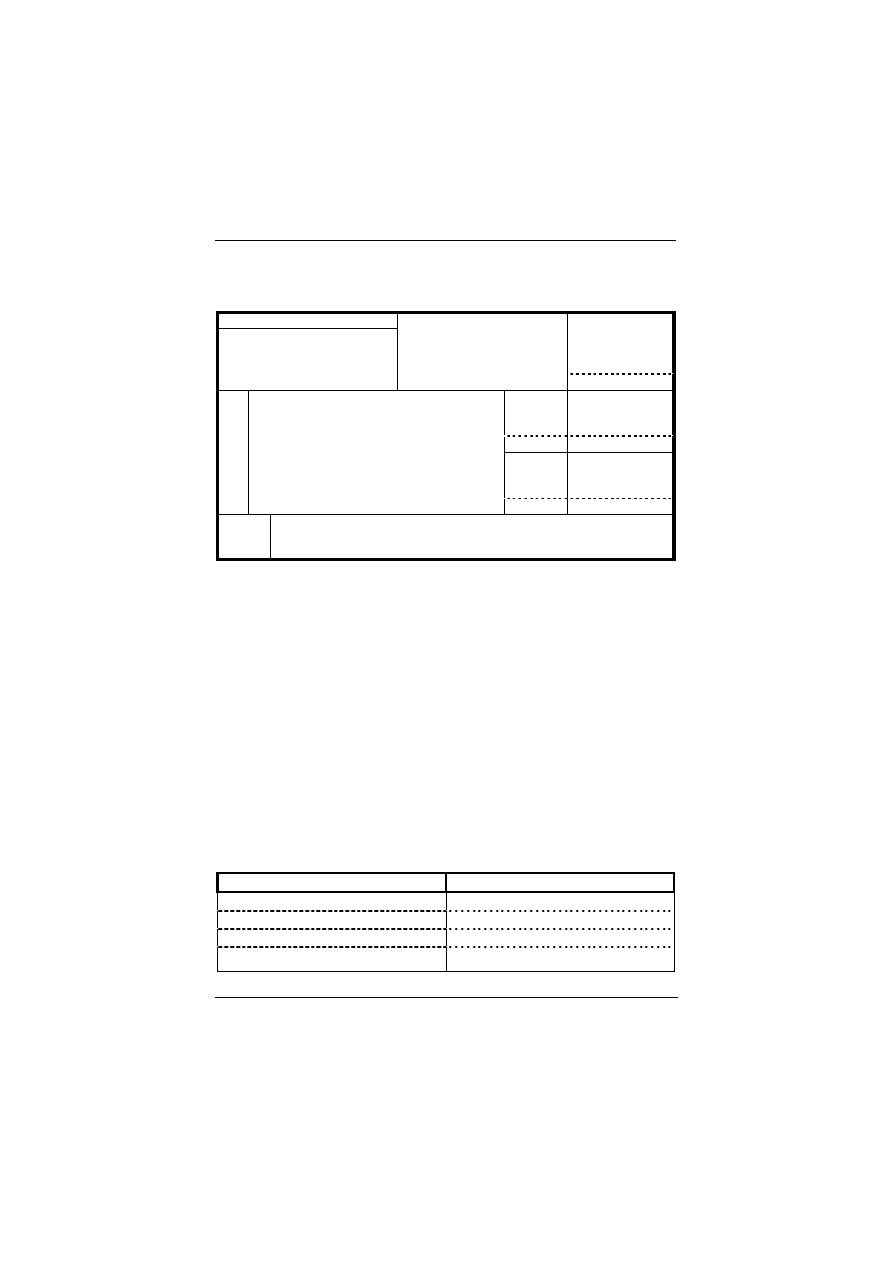
Uczelnia
LABORATORIUM
Aparatów Elektrycznych
Data
Grupa
Rok akademicki
Imi
ę i
nazwisk
o
Zespół
Ocena
Temat
Badanie stycznika
1. CEL
ĆWICZENIA
Celem badania styczników jest poznanie jego budowy, zasady działa-
nia, zastosowania oraz poznaniu jego podstawowych parametrów i charak-
terystyk. Samo badanie polega na stwierdzeniu prawidłowości jego działa-
nia oraz stwierdzenia czy jego parametry techniczne odpowiadają wymaga-
niom i dopuszczają dany stycznik do eksploatacji.
2. DANE
ZNAMIONOWE
Przed rozpoczęciem ćwiczenia należy zapoznać się z charakterystycz-
nymi danymi stycznika umieszczonymi na tabliczce znamionowej oraz na
cewce stycznika, zapisać je oraz dokonać oględzin zewnętrznych. Na ich
podstawie dobrać odpowiednie przyrządy pomiarowe.
Tabliczka znamionowa
Cewka stycznika
Laboratorium Aparatów Elektrycznych @KEMOR
57
3. PRZEBIEG
POMIARÓW
3.1. Pomiar czasów załączania i wyłączania styczników
Pomiar czasu załączania i wyłączania styczników prowadzimy aby
uzyskać informację o tym jak długi musi być impuls zadający aby stycznik
działał prawidłowo. Jest to wielkość nie wykorzystywana często lecz po-
trzebna w układach wielomaszynowych oraz skomplikowanych procesach
łączeniowych.
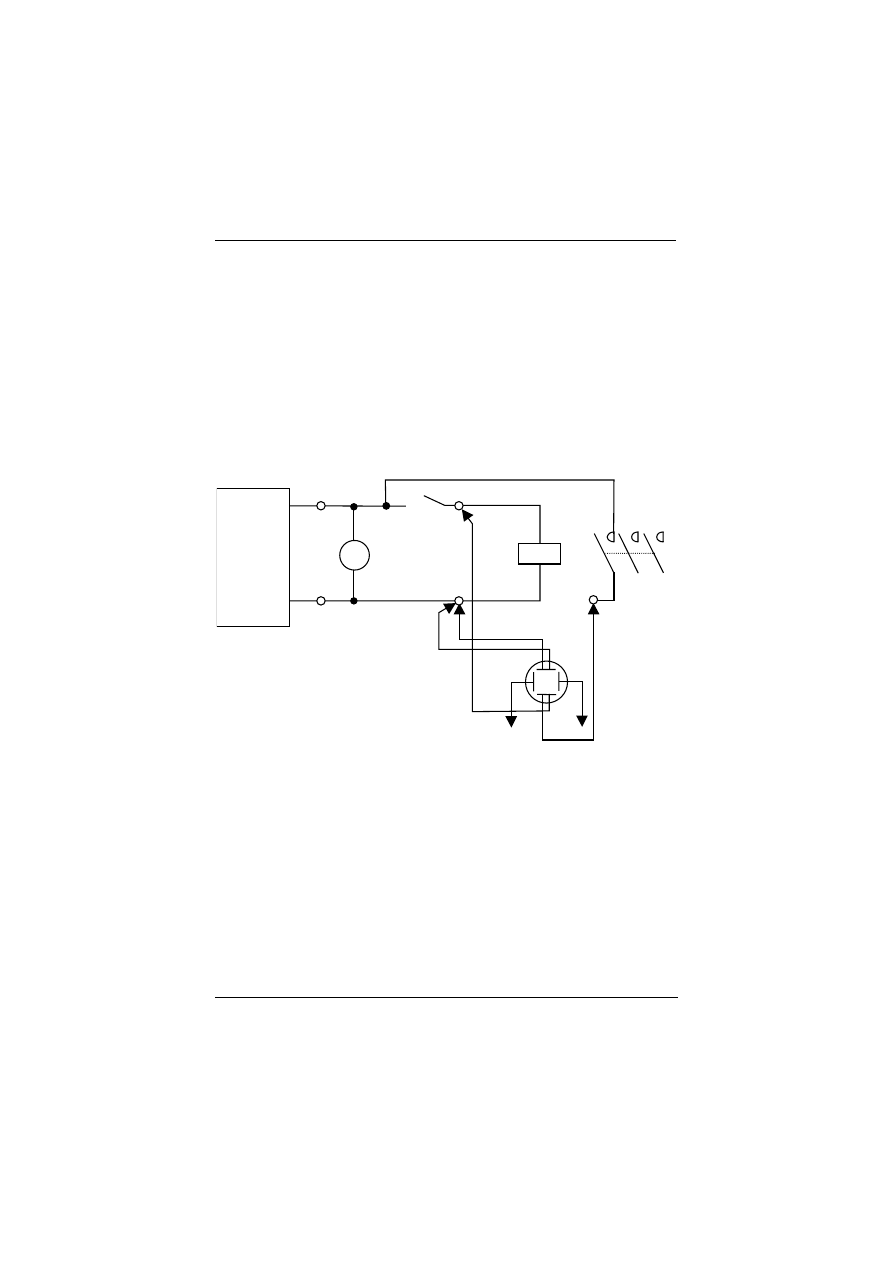
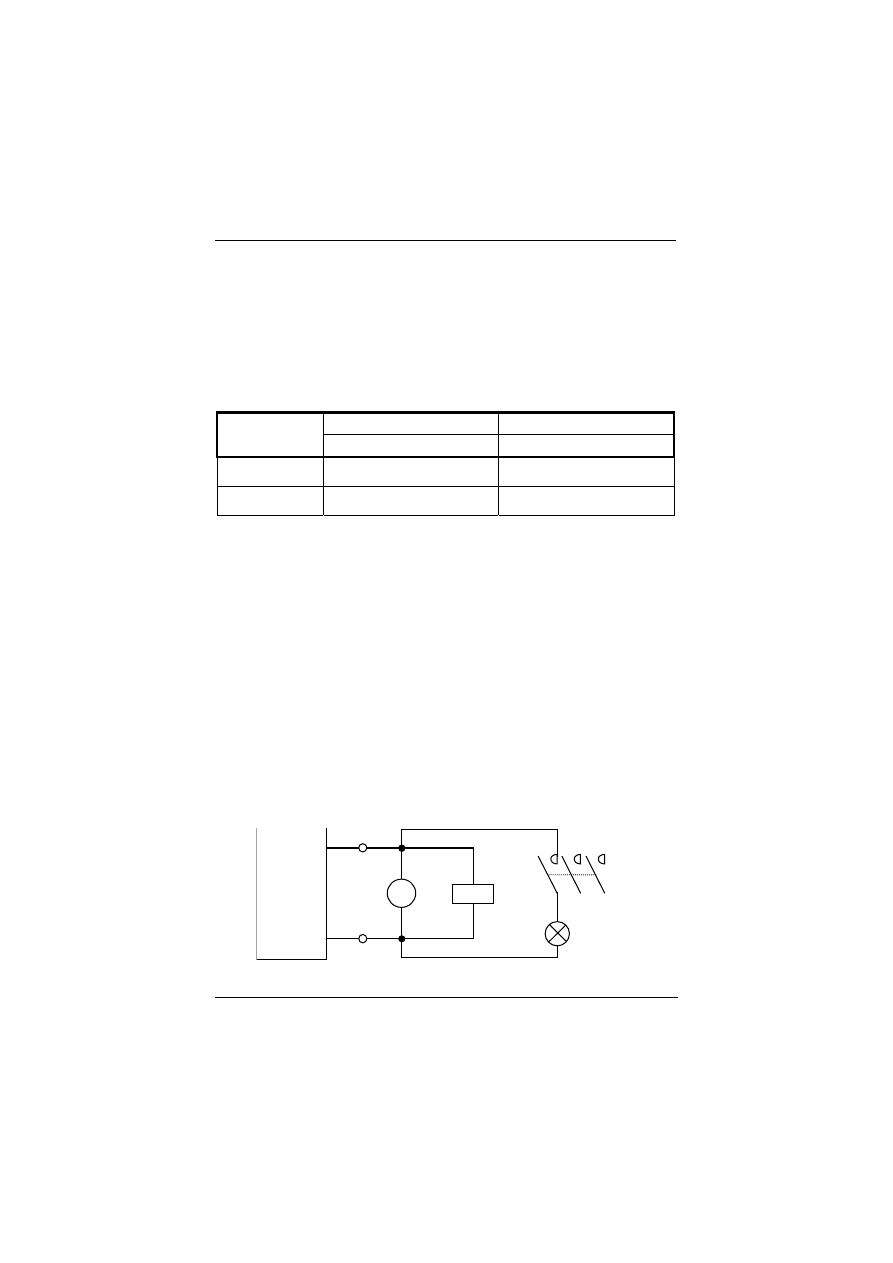
3.1.1. Schemat pomiarowy
W
+
−
V
ZA
SI
LA
C
Z
P
R
Ą
DU
ST
A
Ł
EG
O
U =
v
ar
.
K1
A2
A1
3
1
5
2
4
6
K1
Zalecenia przestrzegania połączeń:
• Zacisk „+” zasilacza połączyć z zaciskiem przewodu czerwonego
cewki stycznika.
• Zacisk „−” zasilacza połączyć z zaciskiem przewodu niebieskiego
cewki stycznika.
• Grubsze końcówki pomiarowe sond napięciowych ustawić na poten-
cjał „+” zasilacza.
3.1.2. Przebieg ćwiczenia
A. Ustawić wartość napięcia na zasilaczu bliską napięciu znamio-
nowemu cewki stycznika (20 – 24V DC).
B. Poprzez załączanie i wyłączanie stycznika wyłącznikiem (W)
należy zaobserwować oscylogramy dla dwóch styczników i na
Laboratorium Aparatów Elektrycznych @KEMOR
58
ich podstawie policzyć czasy: załączenia (czas własny)
i wyłączenia stycznika.
Pomiary należy tak wykonać, aby można było zaobserwować cały
przebieg procesu załączenia i wyłączenia stycznika.
3.1.3. Tabela pomiarowa
Czas załączenia
Czas wyłączenia
[ms]
[ms]
Stycznik nr 1
Stycznik nr 2
3.1.4. Opracowanie ćwiczenia
• Porównać oscylogramy dla obydwu styczników, przedstawić różnice.
• Jaką funkcję spełnia dioda w styczniku – wyjaśnić zagadnienie.
3.2. Pomiar napięcia załączania i wyłączania styczników.
Pomiar napięcia załączania i wyłączania stycznika – jest to wielkość
podstawowa mająca na celu stwierdzenie czy dany stycznik działa prawi-
dłowo i nadaje się do danej grupy maszyn jako jego zabezpieczenie zani-
kowe oraz stwierdzenie czy stycznik w czasie np. rozruchu maszyn gdy na-
pięcie sieci obniży się do pewnej wartości zapewni połączenie torów prą-
dowych.
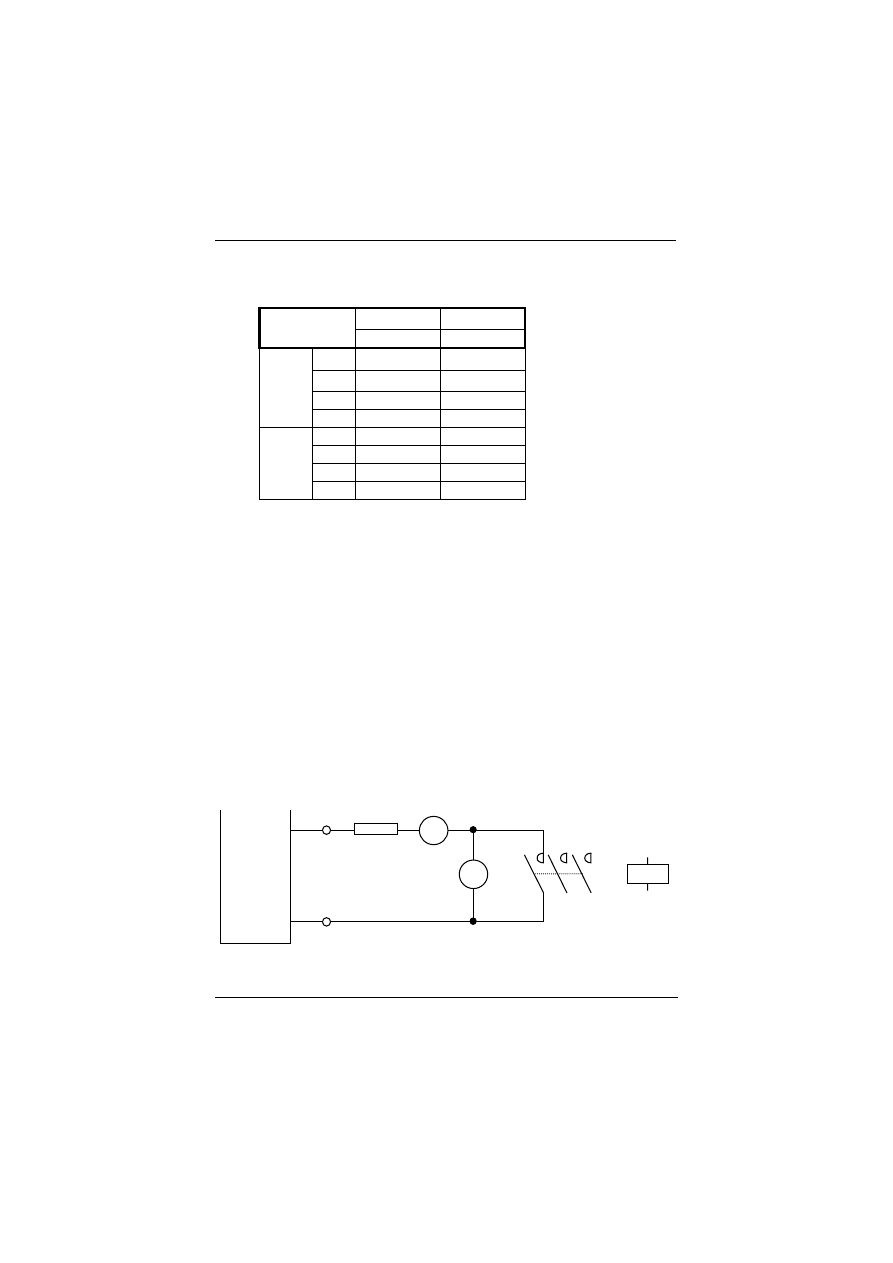
3.2.1. Schemat pomiarowy
ZASI
LAC
Z
P
R
Ą
DU
ST
A
Ł
EG
O
U =
v
ar
.
+
−
V
K1
A2
A1
3
1
5
2
4
6
K1
Laboratorium Aparatów Elektrycznych @KEMOR
59
3.2.2. Tabela pomiarowa:
Up
Uo
L.p.
[V]
[V]
1.
2.
3.
Stycznik
nr 2
ŚR
1.
2.
3.
Styczni
k nr
1
ŚR
3.2.3. Opracowanie ćwiczenia
Przedstawić wyniki pomiarów w postaci wykresu pętli histerezy.
3.3. Pomiar rezystancji styków.
Pomiar rezystancji styków – jako wielkość mająca na celu stwierdze-
nie stanu zużycia styków oraz możliwości przepustowości prądowej
z uwzględnieniem komory gaszeniowej.
Rezystancja styków stycznika powinna być jak najmniejsza i nie po-
winna przekraczać 0,5 Ω. W przypadku przekroczenia tej wartości stycznik
nie nadaje się do dalszego użytkowania. Styki wskutek oddziaływania at-
mosferycznego pokrywają się trudną do usunięcia warstwą tlenków i wodo-
rotlenków stosuje się więc ich docieranie w celu zmniejszenia oporności.
3.3.1. Schemat pomiarowy (metoda techniczna)
ZA
SI
L
A
C
Z
P
R
Ą
DU
ST
A
Ł
EG
O
U =
v
ar
.
+
−
mV
A
R
3
1
5
2
4
6
K1
K1
A2
A1
UWAGA! Podczas pomiarów należy zewrzeć zestyk główny stycznika.
Laboratorium Aparatów Elektrycznych @KEMOR
60
3.3.2. Tabela pomiarowa
U
I
R
K
L.p.
[mV]
[A]
[
Ω]
1.
2.
3.
Stycznik
Nr 1
R
K1 ŚREDNIA
1.
2.
3.
Stycznik
Nr 2
R
K2 ŚREDNIA
3.4. Pomiar rezystancji izolacji
W celu pomiaru rezystancji izolacji zamiast mostka Thomsona należy
podłączyć megaomomierz i zmierzyć rezystancję pomiędzy poszczególny-
mi zaciskami a masą, obudową a masą a także pomiędzy poszczególnymi
zaciskami. Wartość tej rezystancji powinna być jak najwyższa
a w przypadku gdy jest mniejsza od 10 MΩ stycznik nie może być dalej
eksploatowany.
3.4.1. Tabela pomiarowa:
Zaciski megaomomierza
R
L.p.
Zacisk nr 1
Zacisk nr 2
[M
Ω]
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
4. WNIOSKI I SPOSTRZERZENIA
5. WYKRESY
Laboratorium Aparatów Elektrycznych @KEMOR
61
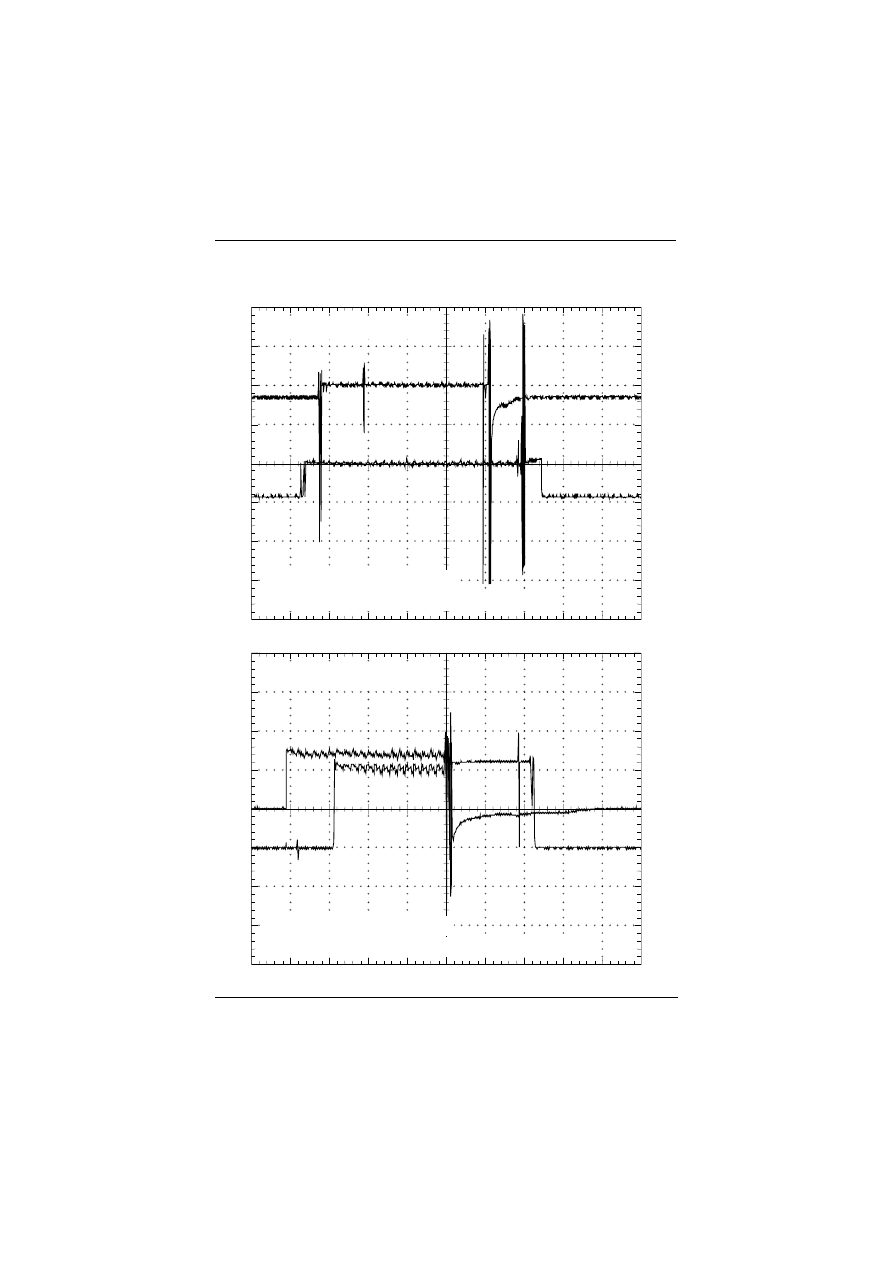
6. OSCYLOGRAMY
Górny (Cewka): 50V/dz
Dolny(Zestyk toru głównego): 20V/dz
Podstawa czasu: 0,1s/dz
Załączenie i wyłączenie stycznika bez diody gaszącej
Górny (Cewka): 10V/dz
Dolny (Zestyk toru głównego): 10V/dz
Podstawa czasu: 0,1s/dz
Załączenie i wyłączenie stycznika z diodą gaszącą
Laboratorium Aparatów Elektrycznych @KEMOR
62
ĆWICZENIE NR IV
BADANIE PRZEKAŹNIKA PÓŁ-
PRZEWODNIKOWEGO
Laboratorium Aparatów Elektrycznych @KEMOR
63
1. WIADOMOŚCI TEORETYCZNE
1.1. PRZEZNACZENIE
PRZEKAŹNIKÓW PÓŁPRZEWODNIKO-
WYCH ZMIENNOPRĄDOWYCH (PPZ)
Przekaźniki półprzewodnikowe są bezstykowymi urządzeniami
przeznaczonymi do stosowania w części wykonawczej układów sterowania
i automatycznej regulacji urządzeń elektrotechnicznych. Umożliwiają włą-
czenie i wyłączenie przepływu energii elektrycznej, ze źródła do odbiorni-
ka w funkcji impulsowego sygnału sterującego.
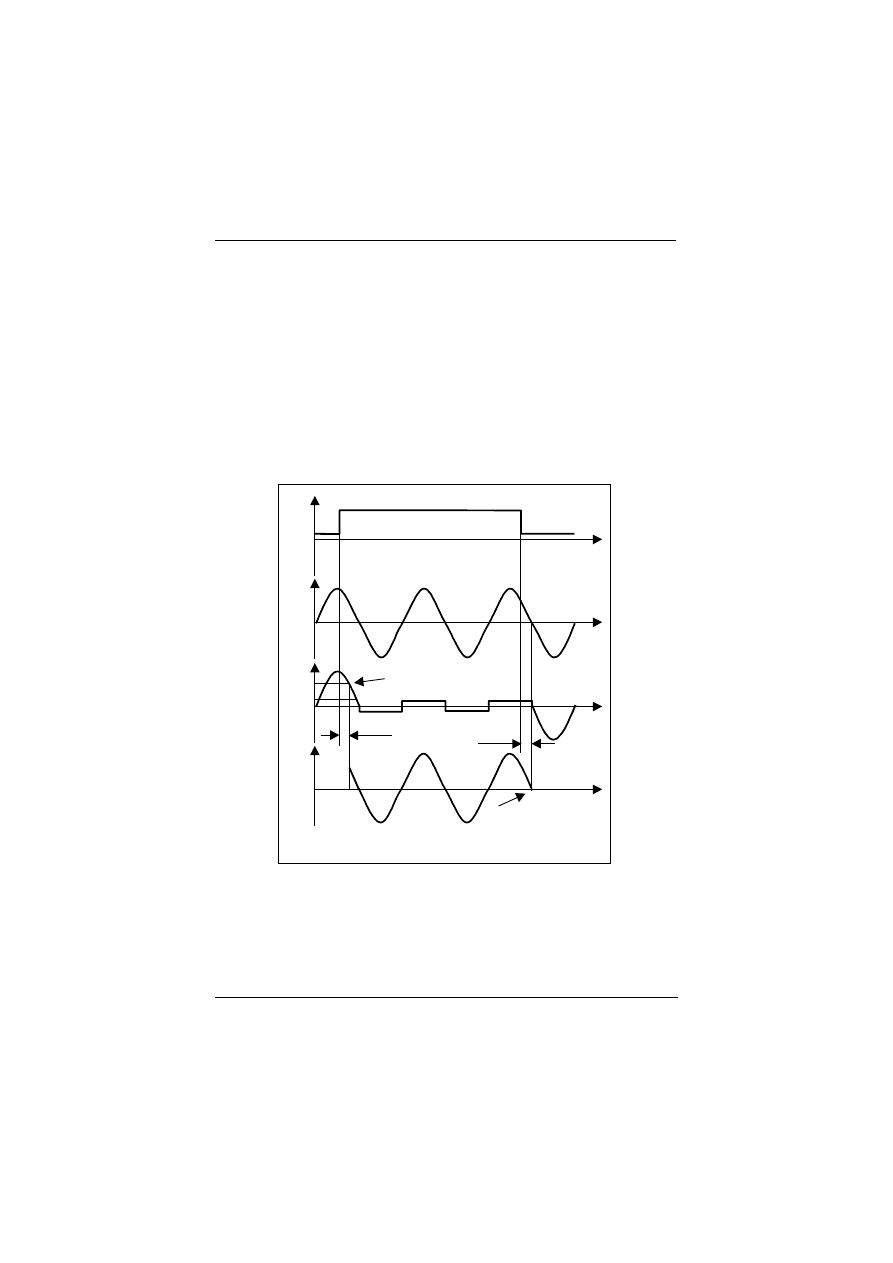
1.2. OPIS KONSTRUKCJI I ZASADY DZIAŁANIA
U
S
U
P
U
12
5V
1V
I
P
t
t
t
t
t
0Z
t
0W
Moment załączenia
PPZ w zerze napięcia
Moment wyłączenia
PPZ w zerze prze-
wodzącego prądu
Dioda LED się świeci
U
S
- napięcie sterownicze, U
p
- napięcie zasilające, U
12
- napięcie na zaciskach
przekaźnika, I
p
- prąd przewodzony przez przekaźnik
Przekaźniki półprzewodnikowe zmiennoprądowe posiadają układ
sterowania na diodach LED oraz układ przełączający z elementami przełą-
czalnymi (triaki, tyrystory, fototyrystory ). Nadają się one tylko do przełą-
czania sygnałów mocy zmiennoprądowych. Nie należy ich stosować do
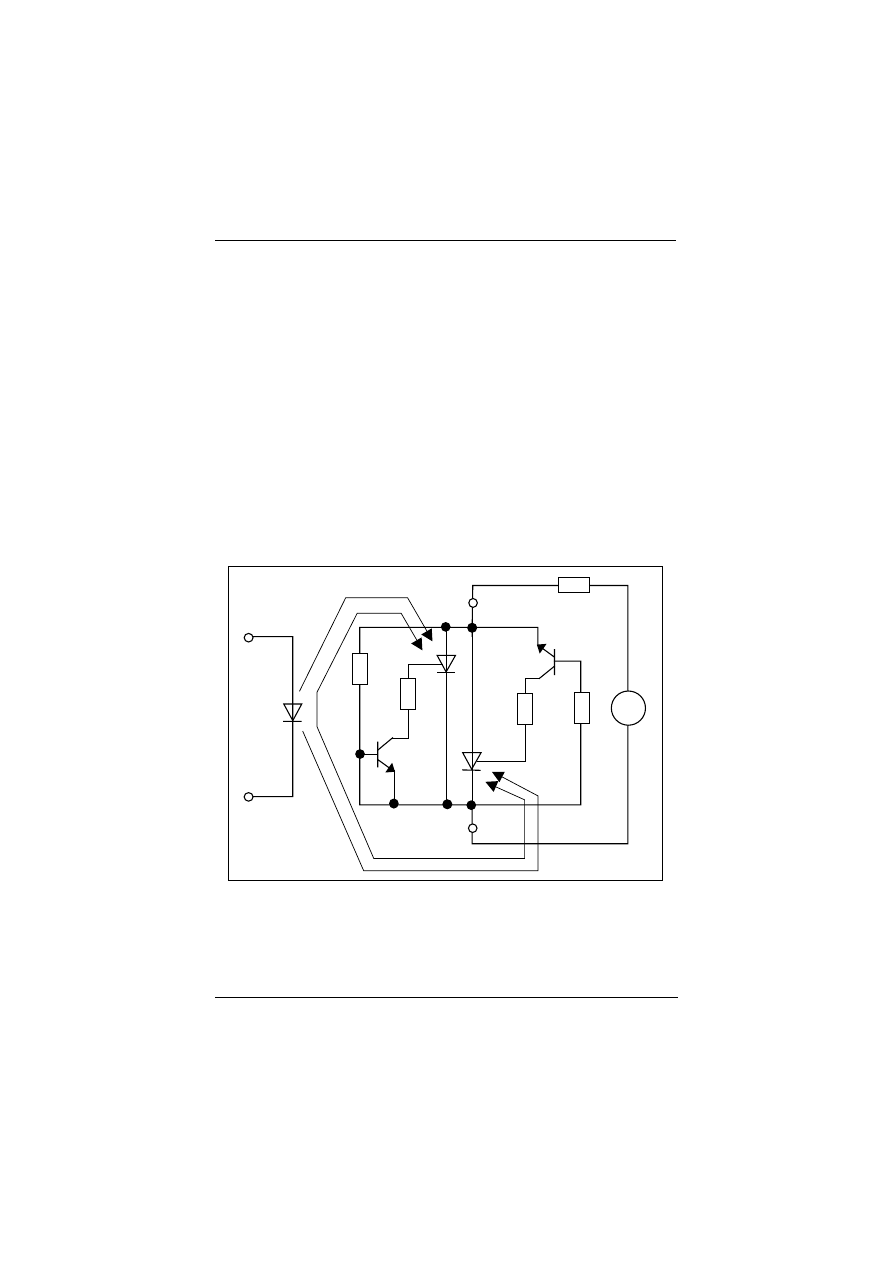
Laboratorium Aparatów Elektrycznych @KEMOR
64
obwodów stałoprądowych, gdyż nie można w nich wyłączyć tyrystora bez
zmniejszenia do zera przewodzonego prądu. Elementem sterującym w tym
przekaźniku jest dioda LED emitująca światło podczerwone i oświetlająca
nim poprzez soczewkę z transparentnej żywicy silikonowej dwa fototyry-
story T
F1
i T
F2
. Oświetlenie pozwala na przepływ prądu wewnątrz struktury
fototyrystora między jego anodą i katodą. Jednak by fototyrystor mógł
przewodzić musi wystąpić na jego bramce dodatnie napięcie w stosunku do
katody. Przewodzący tranzystor T
1
zwiera bramkę T
F1
z katodą. T
1
prze-
wodzi dlatego, gdyż jest spolaryzowany poprzez rezystor R
B1
dodatnią po-
łówką napięcia przełączonego. Gdy wartość chwilowa przełączanego na-
pięcia zmiennego doprowadzonego do zacisków wyjściowych 1 i 2 prze-
kaźnika zmaleje w czasie okresu i osiągnie wartość bliską zeru, to wtedy
tranzystor T
1
zostanie spolaryzowany zaporowo (zatkany), a fototyrystor
zacznie przewodzić. Przekaźnik półprzewodnikowy zmiennoprądowy PPZ
zostaje, w ten sposób załączony w zerze napięcia przełączającego (ang. ze-
ro crossing turn on).
ST
E
R
OWANI
E
D
1
R
B1
R
C1
T
F1
T
F2
T
1
T2
R
C2
R
B2
~
220V
50Hz
(1)
(2)
Z
OBC
Gdy prąd przewodzony przez fototyrystor osiągnie wartość zerową
to spowoduje jego wyłączenie (ang. curent crossing turn off). Ponieważ
dioda LED nadal świeci to dla drugiej połówki napięcia mechanizm załą-
czania fototyrystora T
F2
będzie identyczny. Z chwilą zakończenia świece-
nia diody LED przekaźnik przewodzi nadal, aż do momentu najbliższego
Laboratorium Aparatów Elektrycznych @KEMOR
65
zaniku do zera wartości prądu przewodzonego przez jeden z fototyrysto-
rów. Przekaźnik nie załączy się samoczynnie, gdyż fototyrystory nie są po-
budzone światłem. Napięcie „zerowe”, w którym zostaje załączony (pobu-
dzony) światłem fototyrystor ma w rzeczywistości wartość rzędu kilku
woltów (1...5V). Wartość napięcia „załączania w zerze” zależy od wartości
rezystorów bazowych R
B
oraz tranzystorów T
1
i T
2
.
Zalety załączania i wyłączania w zerze w PPZ jest minimalizowanie
impulsów prądowych powstających przy załączaniu przez nie lamp żaro-
wych lub obciążeń o charakterze pojemnościowym. Wyłączanie w zerze
prądu znacznie zmniejsza generację przepięć na obciążeniach o charak-
terze indukcyjnym, nawet gdy w obwodzie występuje znaczne przesunięcie
faz pomiędzy prądem i napięciem. Ponadto załączanie w zerze obciążeń o
charakterze pojemnościowym jest bardzo korzystne i nie powoduje po-
wstawania zakłóceń ze względu na wolne narastanie wartości prądu
w załączonym obwodzie . PPZ na skutek przepięć powstających w prze-
łączanym obwodzie, mogą zostać załączone w sposób przypadkowy po-
przez zbyt dużą wartość szybko narastającego napięcia. Dzieje się tak ze
względu na istnienie wewnętrznych pojemności między bramką i anodą
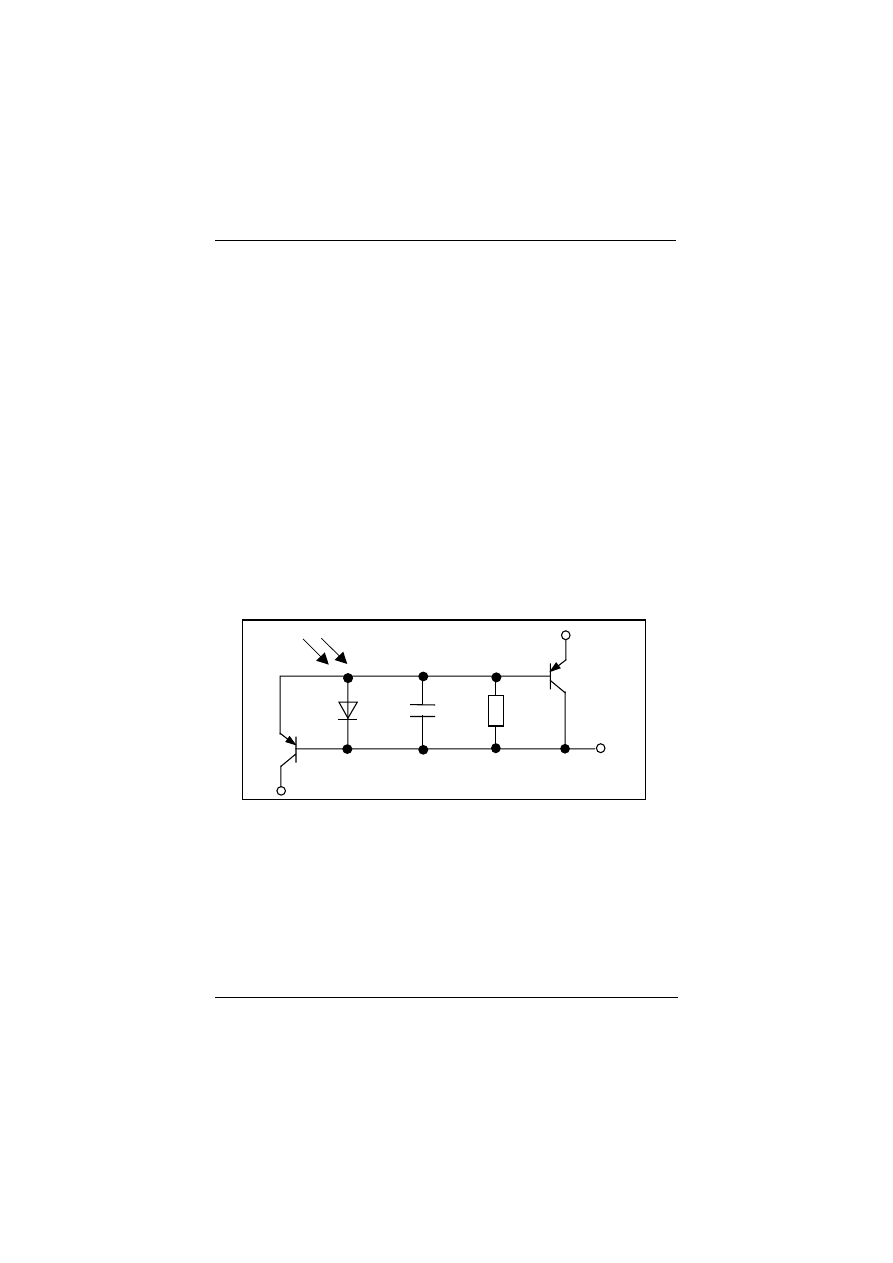
fototyrystora. Układ wewnętrzny PPZ pokazuje poniższy rysunek.
D
C
R
KATODA
BRAMKA
T1
T2
ANODA
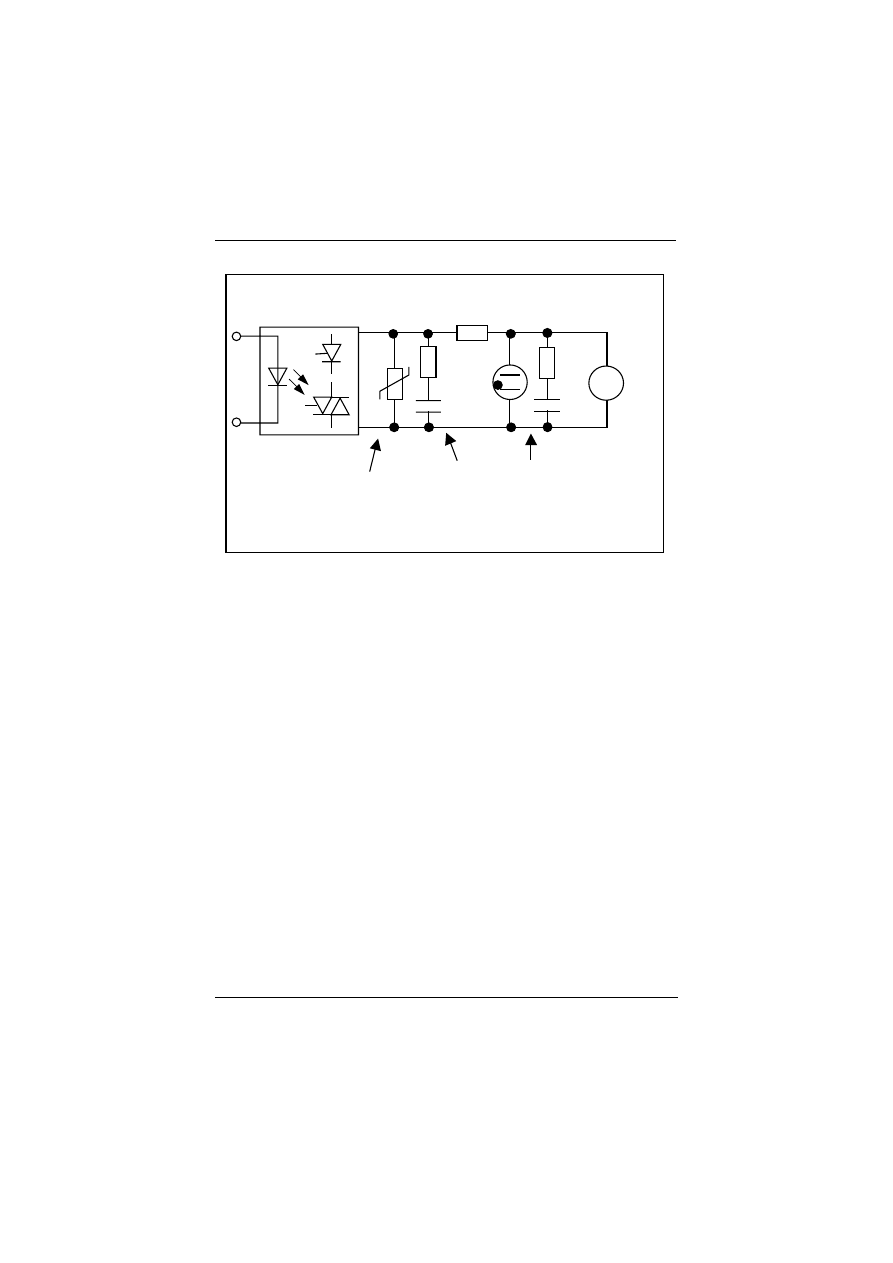
Aby uniknąć niekorzystnego zjawiska przypadkowego załączenia
PPZ na jego zaciskach dołączone są równoległe układy przesuwników fa-
zowych typu RC lub warystory ograniczające wielkości przepięć.
Układy zabezpieczeń obrazuje schemat zawarty na rysunku poniżej.
Wielkość prądu jaka może być przewodzona w sposób ciągły oraz impul-
sowy w czasie przepięć, wyznacza wielkość struktury fototyrystora oraz
sposób odprowadzenia ciepła. Problemy odprowadzenia ciepła są jednymi
z najważniejszych jakie należy brać pod uwagę przy projektowaniu ukła-
dów zawierających te podzespoły.
Laboratorium Aparatów Elektrycznych @KEMOR
66
Zabezpieczenie przed
nadmiernym napięciem na
stykach PPZ
Zabezpieczenie
przed
przypadkowym
załączeniem się
PPZ
R1
Zabezpieczenie przed
przepięciami
dostającymi się od
strony sieci (odgromnik
i układ RC)
Z
OBC
PP prądu zmiennego z
triakami lub tyrystorami
~
220V
50Hz
R2
W
C1
C2
AC
UKŁADY ZABEZPIECZEŃ PPZ
1.3. ZALEŻNOŚCI OPISUJĄCE PODSTAWOWE FUNKCJE
PRZEKAŹNIKA PÓŁPRZEWODNIKOWEGO ZMIENNO-
PRĄDOWEGO
U
obc
= 0
dla U
s
< 3
I
obc
= I
pmax
dla U
s
≥ 3V
U
obc
= U
0max
dla U
s
≥ 3V
P
obc
= 0
dla U
s
< 3V
I
obc
= 0
dla U
s
< 3V
P
obc
= P
pmax
dla U
s
≥ 3V
U
obc
-
napięcie na odbiorniku,
I
obc
-
prąd w obwodzie odbiornika,
P
obc
- moc dostarczana do odbiornika,
U
s
-
napięcie sterowania.
1.4. PARAMETRY
TECHNICZNE PPZ ZASTOSOWANEGO
W ĆWICZENIU
WEJŚCIOWY OBWÓD STERUJĄCY
• zakres napięć wejściowych [V
DC
]
3
÷32
• min. napięcie wyłączenia [V
DC
]
1
• min. prąd wyłączenia [mA
DC
]
0.4
• rezystancja wejściowa [Ω]
900
÷1100
Laboratorium Aparatów Elektrycznych @KEMOR
67
OBWÓD WYJŚCIOWY
• zakres napięcia zasilającego [V
r.m.s
.
] 24
÷280
• prąd wyjściowy [A
r.m.s
.
]
0.05
÷10
• wartość prądu w stanie blokowania [mA
r.m.s
.
]
5
÷9
• przesterowanie prądowe (wartość chwilowa) [A
peak
]
100
• wartość napięcia zadziałania [V
peak
]
1.85
DANE OGÓLNE
• maksymalna wartość czasu włączania [ms]
9.5
• maksymalna wartość czasu wyłączania [ms]
9.5
• częstotliwość pracy [Hz]
47
÷63
• temperatura pracy [°C]
-20
÷ +80
1.5. CHARAKTERYSTYKI PODAWANE PRZEZ PRODUCENTA
0
2
4
6
8
10
M
O
C
T
R
A
C
O
N
A
20 30 40 50 60 70 80
12
10
8
6
4
2
V
R.M.S
BEZ RADIATORA
Z RADIATOREM
1
°C/V
Prąd wyjścia [A
R.M.S.
]
Temperatura otoczenia [
°C]
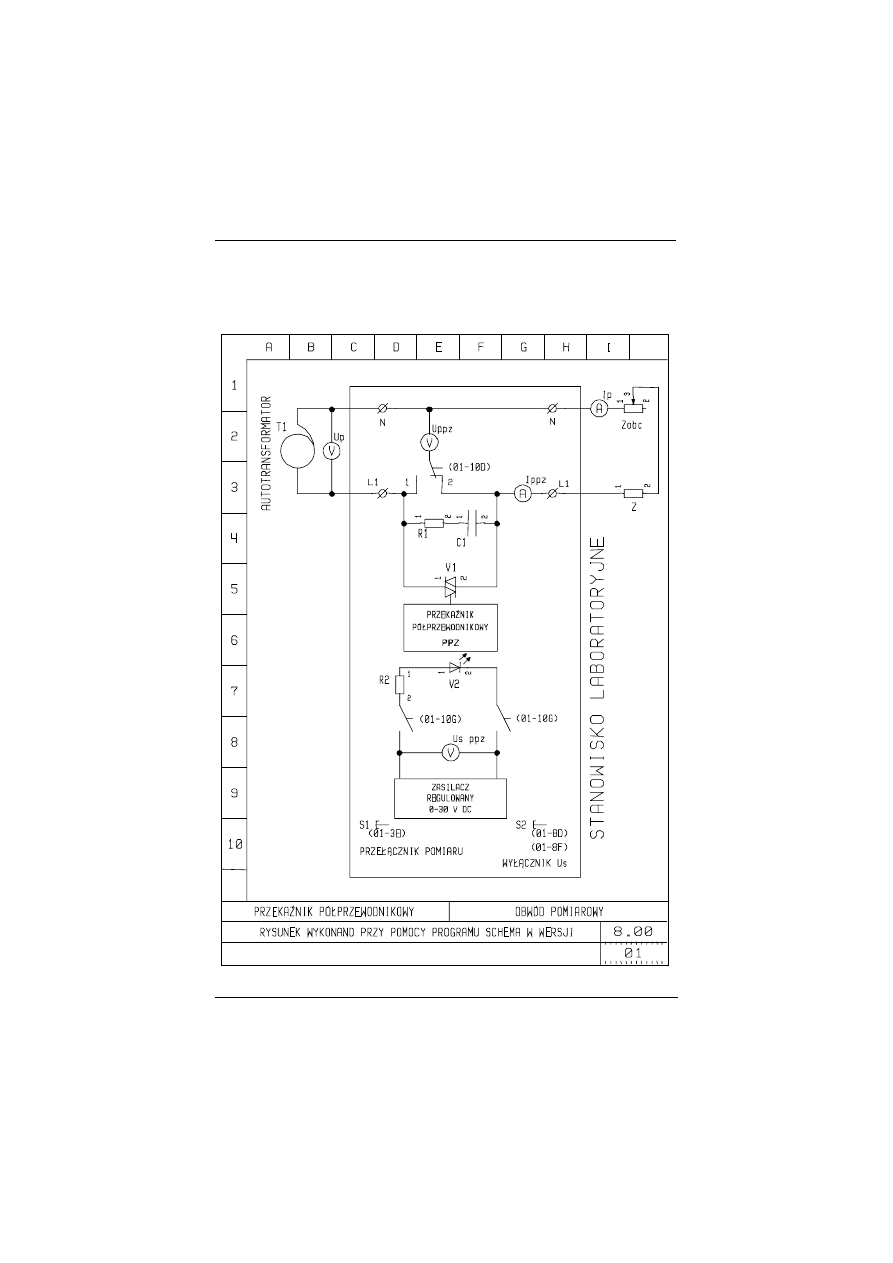
Laboratorium Aparatów Elektrycznych @KEMOR
68
1.6. SCHEMAT UKŁADU POMIAROWEGO
Laboratorium Aparatów Elektrycznych @KEMOR
69
Do układu dołączony jest oscyloskop dwukanałowy pokazujący przebieg
napięcia i prądu.
Wyjście przekaźnika półprzewodnikowego obciążone jest dwoma impe-
dancjami:
• Opornica suwakowa pozwalająca zmianę prądu obciążenia,
• Impedancja (Z = 22Ω) zapewniająca przepływ prądu 10A, przy
Z
OBC
= 0.
UWAGA!!!
Ze względu na specyficzną budowę autotransformatora zasilającego i moż-
liwość podania wysokiego potencjału (fazy), na zewnętrzną stronę zaci-
sków pomiarowych, należy zwrócić baczną uwagę na właściwe jego podłą-
czenie do zacisków układu pomiarowego.
ZŁE PODŁĄCZENIE GROZI PORAŻENIEM PRĄDEM!
Laboratorium Aparatów Elektrycznych @KEMOR
70
2. PROGRAM
ĆWICZENIA
Uczelnia
LABORATORIUM
Aparatów Elektrycznych
Data
Grupa
Rok akademicki
Imi
ę i
nazwisk
o
Zespół
Ocena
Temat
Badanie przekaźnika półprzewodnikowego
1. CEL
ĆWICZENIA
Celem ćwiczenia jest zapoznanie się z budową i zasadą działania
przekaźnika półprzewodnikowego, wyznaczenie podstawowych parame-
trów pracy i porównanie ich z przekaźnikami elektromechanicznymi.
2. DANE
ZAMIONOWE
Przed rozpoczęciem ćwiczenia należy zapoznać się z charakterystycz-
nymi danymi przekaźnika półprzewodnikowego oraz dokonać oględzin ze-
wnętrznych. Na ich podstawie dobrać odpowiednie przyrządy pomiarowe.
3. PRZEBIEG
POMIARÓW
3.1. Pomiar napięcia sterowania (załączenia i wyłączenia)
Pomiary należy dokonać przy podłączonym stanowisku do autotrans-
formatora dla dowolnej jego wartości z zakresu 10
÷220V. Należy odczytać
napięcie załączenia (U
S ZAŁ
) przy wzroście napięcia sterowania i napięcie
wyłączenie (U
S WYŁ
) przy jego obniżeniu.
Laboratorium Aparatów Elektrycznych @KEMOR
71
Tabela pomiarowa
U
P
= .... I
P
= ....
U
S ZAŁ
U
S WYŁ
Lp
[V]
[V]
1
2
3
Wartość średnia
3.2. Pomiar wpływu wartości napięcia obciążenia na wielkość
napięcia sterowania
3.2.1. Tabela Pomiarowa
U
P
= var Z
OBC
= const.
U
S
U
PPZ 1
U
PPZ 2
Lp
[V]
[V]
[V]
3.2.2. Opracowanie
Określić wpływ wartości napięcia obciążenia na wartość napięcia
sterowania.
3.3. Pomiar wpływu wartości impedancji obciążenia wielkość
napięcia sterowania
3.3.1. Tabela Pomiarowa
U
P
= const. Z
OBC
= var
U
S
U
PPZ 1
U
PPZ 2
Lp
[V]
[V]
[V]
Laboratorium Aparatów Elektrycznych @KEMOR
72
3.2.2. Opracowanie
Określić wpływ wartości impedancji obciążenia na wartość napięcia
sterowania.
3.4. Obserwacja przebiegów prądu i napięcia
Zaobserwować na oscyloskopie stan załączenia obciążenia przez
przekaźnik półprzewodnikowy następujące przebiegi:
• napięcia obciążenia,
• napięcie przekaźnika półprzewodnikowego
• prądu obciążenia.
4. UWAGI I WNIOSKI
Po wykonaniu ćwiczenia dokonać analizy i porównania przekaźnika
półprzewodnikowego z tradycyjnym przekaźnikiem wyszczególniając wa-
dy i zalety
5. WYKRESY
Na podstawie odczytanych wielkości z miernika cyfrowego stanowi-
ska pomiarowego U
PPZ 1
(po stronie pierwotnej) oraz U
PPZ 2
(po stronie
wtórnej) wykreślić charakterystykę U
PPZ 1
= f(U
PPZ 2
) oraz U
S
= f(U
PPZ 2
)
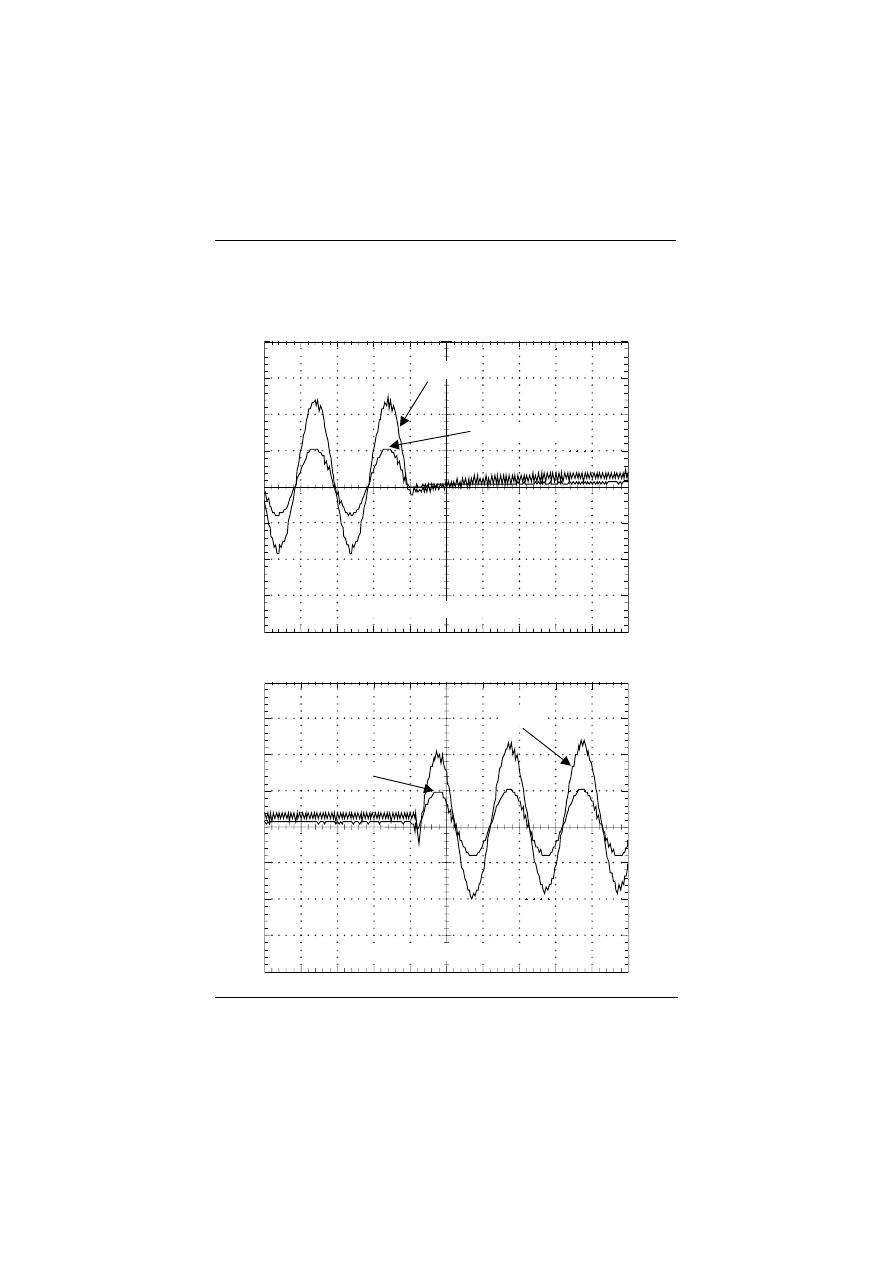
Laboratorium Aparatów Elektrycznych @KEMOR
73
6. OSCYLOGRAMY
PRĄD
POSTAWA CZASU 20ms/dz
NAPIĘCIE
Wyłączenie tyrystora. Prąd i napięcie obciążenia.
PRĄD
POSTAWA CZASU 20ms/dz
NAPIĘCIE
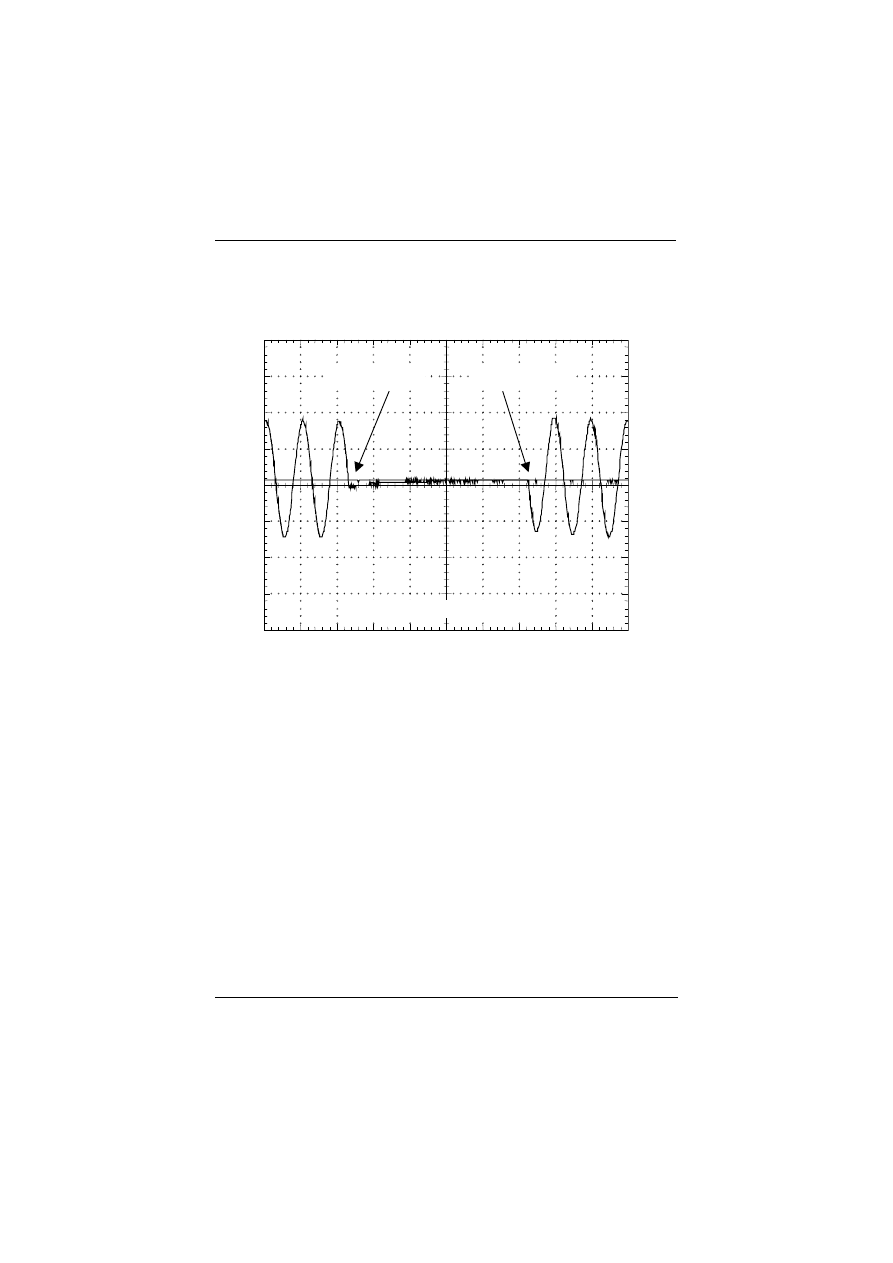
Laboratorium Aparatów Elektrycznych @KEMOR
74
Załączenie tyrystora. Prąd i napięcie obciążenia.
POSTAWA CZASU 20ms/dz
ZAŁĄCZENIE
WYŁĄCZENIE
Napięcie na zaciskach tyrystora.
Laboratorium Aparatów Elektrycznych @KEMOR
75
ĆWICZENIE NR V
BADANIE BEZSTYKOWEGO
REGULATORA NAPIĘCIA TYPU
BRN-3a
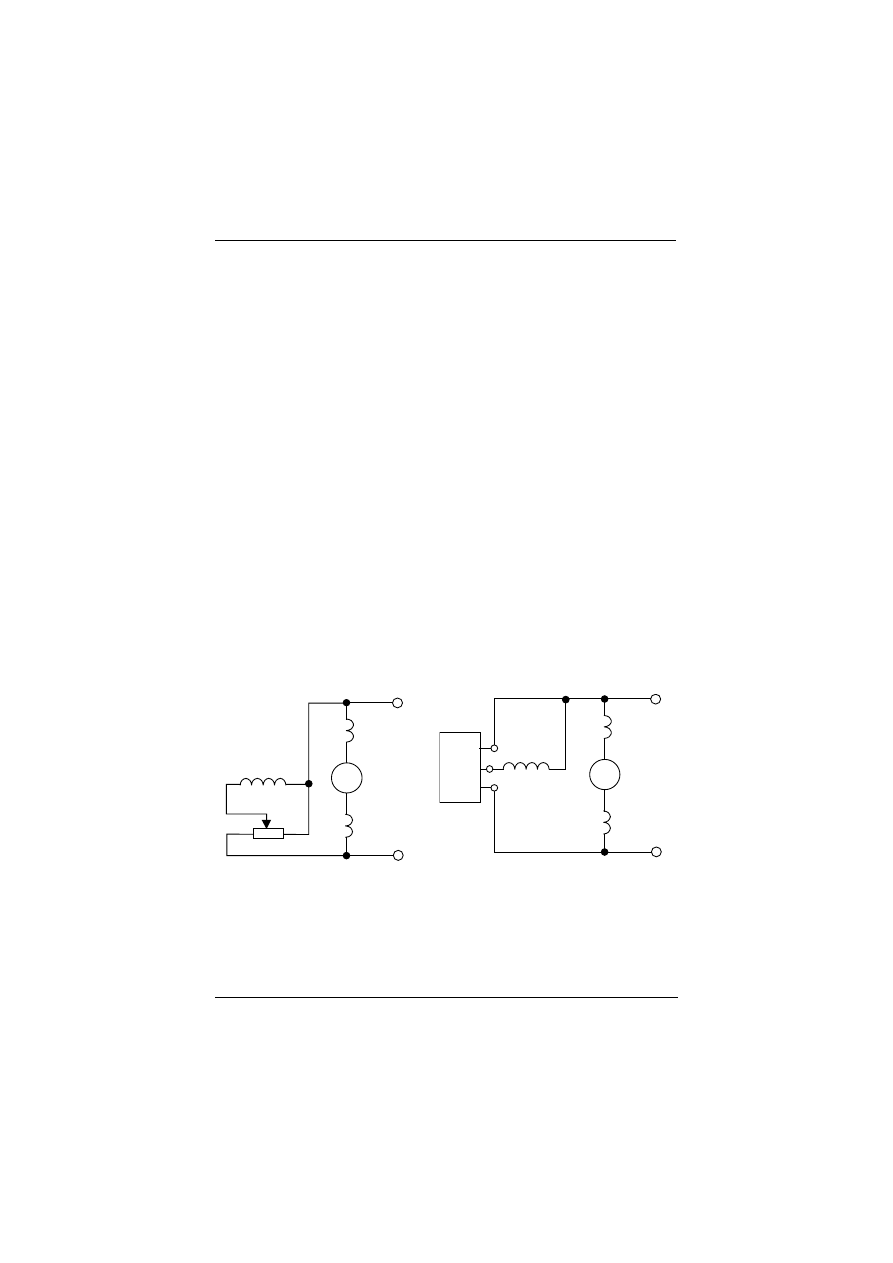
Laboratorium Aparatów Elektrycznych @KEMOR
76
1. WIADOMOŚCI TEORETYCZNE
1.1. PRĄDNICA BOCZNIKOWA PRĄDU STAŁEGO
Podstawowym źródłem energii elektrycznej do zasilania elektrycz-
nych obwodów pomocniczych pojazdów elektrycznych i spalinowych są
bocznikowe prądnice prądu stałego. Prądnica taka składa się z:
•
stojana, w którym na biegunach magnetycznych zbudowane jest
uzwojenie wzbudzenia oraz uzwojenie komutacyjne,
•
twornika, na którym w żłobkach umieszczone jest uzwojenie połą-
czone z wycinkami komutatora,
•
komutatora osadzonego na wale twornika,
•
mostka szczotkowego ze szczotkotrzymaczami.
Uzwojenie stojana połączone jest równolegle z uzwojeniem tworni-
ka. Wzbudzenie prądnicy następuje dzięki temu, że posiada magnetyzm
szczątkowy. W chwili rozruchu prądnicy uzwojenie umieszczone w tworni-
ku przecina strumień magnetyczny wywołane magnetyzmem szczątkowym.
Przy odpowiedniej liczbie obrotów w uzwojeniu twornika indukuje się
SEM o określonej wartości
W celu utrzymania wartości napięcia na poziomie 110V w obwód
uzwojenia wzbudzenia prądnicy włączono bezstykowy regulator napięcia
typu BRN- 3a. Poniżej przedstawiono schematy połączeń prądnicy boczni-
kowej bez i z regulatorem BRN-3a oraz porównawcze charakterystyki ze-
wnętrzne prądnicy dla dwóch rodzajów połączeń.
1
2
+
G
2
1
1
2
Rrw
1
2
−
OB
CI
ĄŻ
EN
IE
Schemat połączeń prądnicy bocz-
nikowej.
1
2
+
G
2
1
1
2
1
2
−
BR
N
-3
a
−
w
+
ZP”+”
ZP”w”
ZP”
−
OB
C
IĄŻ
EN
IE
Schemat podłączenia regulatora napię-
cia BRN-3a do układu prądnicy.
UWAGA!
W PRZYPADKU BRAKU BRN-3A NALEŻY ZEWRZEĆ ZACI-
SKI ZP”W” ORAZ ZP”
−”
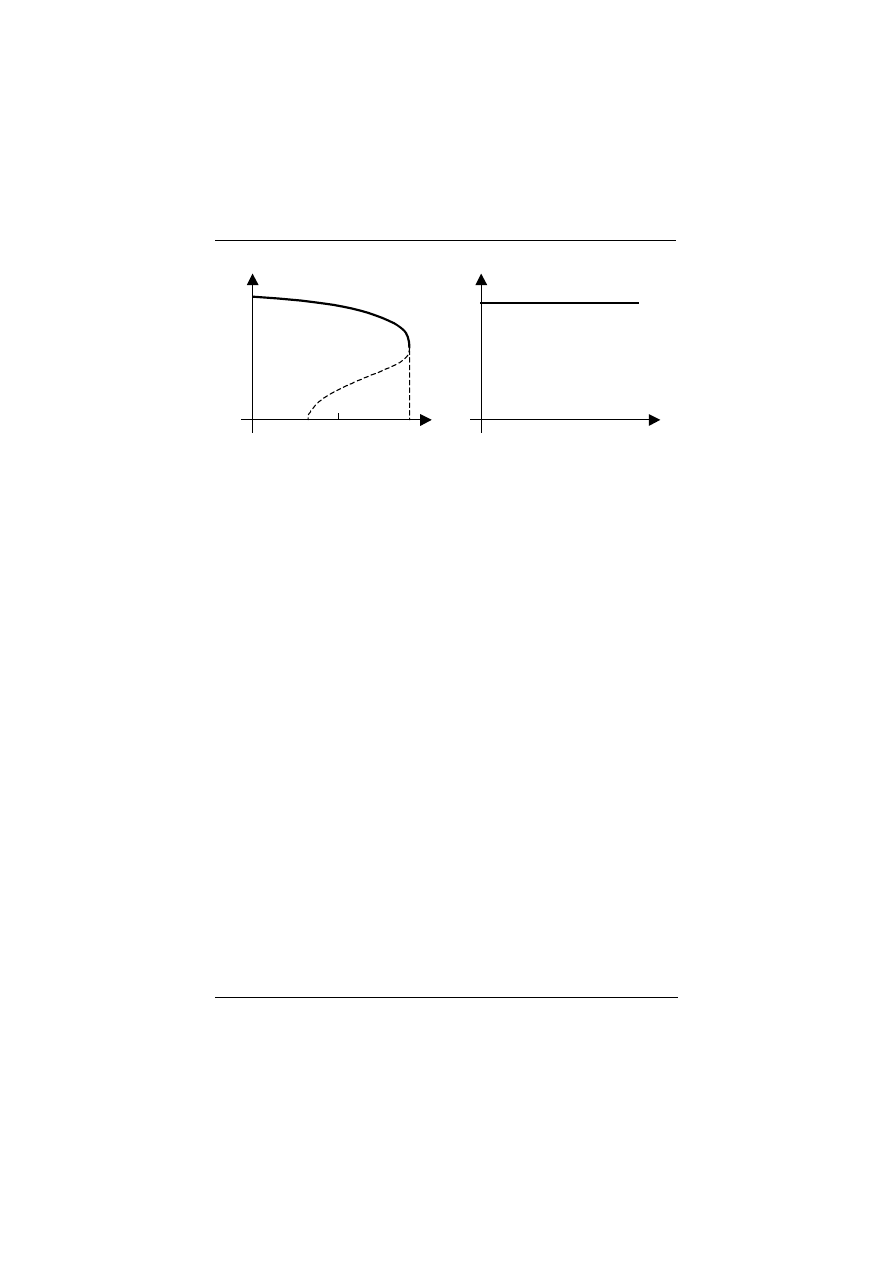
Laboratorium Aparatów Elektrycznych @KEMOR
77
U
0
U
0
I
Z
I
N
I
MAX
I
U = f (I); n = const.
Prądnica pracuje z odłączonym re-
gulatorem napięcia BRN-3a.
U
0
U
0
I
U = f (I); n = const.
Prądnica pracuje z dołączonym re-
gulatorem napięcia BRN-3a.
1.2. BUDOWA REGULATORA NAPIĘCIA
Regulator napięcia typu BRN-3a jest aparatem statycznym, bezsty-
kowym, zbudowanym w oparciu o elementy półprzewodnikowe. Podstawę
konstrukcyjną stanowi płyta wsporcza wykonana z materiału izolacyjnego.
Człony wykonawcze zgrupowane są na dwóch płytach wsporczych przy-
mocowanych do konstrukcji wsporczej. Elementy członów sterujących
umieszczone są na dwóch płytach z obwodami drukowanymi, które łączą
się z pozostałymi obwodami elektrycznymi regulatora za pomocą złącz
wielowtykowych. Gniazda złącz przymocowane są do konstrukcji wspor-
czej, natomiast wtyki złącza do płytki sterującej. Prawidłowe połączenie
zapewniają prowadnice. Regulator przymocowany jest dwoma śrubami do
konstrukcji. Na stronie czołowej regulatora znajduje się bezpiecznik oraz
potencjometr służący do korekcji napięcia prądnicy. Połączenie z obwoda-
mi elektrycznymi pojazdu trakcyjnego umożliwia listwa zaciskowa znajdu-
jąca się w dolnej części regulatora. Obudowa regulatora nie wymaga spe-
cjalnego połączenia z konstrukcją pojazdu, ponieważ płyty izolacyjne cał-
kowicie zapewniają bezpieczeństwo w czasie konserwacji regulatora.
Regulator napięcia typu BRN-3a służy do stabilizacji napięcia po-
mocniczych prądnic prądu stałego w pojazdach trakcyjnych trakcji elek-
trycznej i spalinowej. Moc prądnic, z którymi może współpracować ten re-
gulator waha się w granicach od 1.5kW do 25kW, a prąd wzbudzenia osiąga
wartość do 5A. Budowa regulatora umożliwia jego zastosowanie w po-
mieszczeniach zamkniętych bez wymuszonego chłodzenia powietrzem,
w otoczeniu wolnym od pyłów i gazów żrących
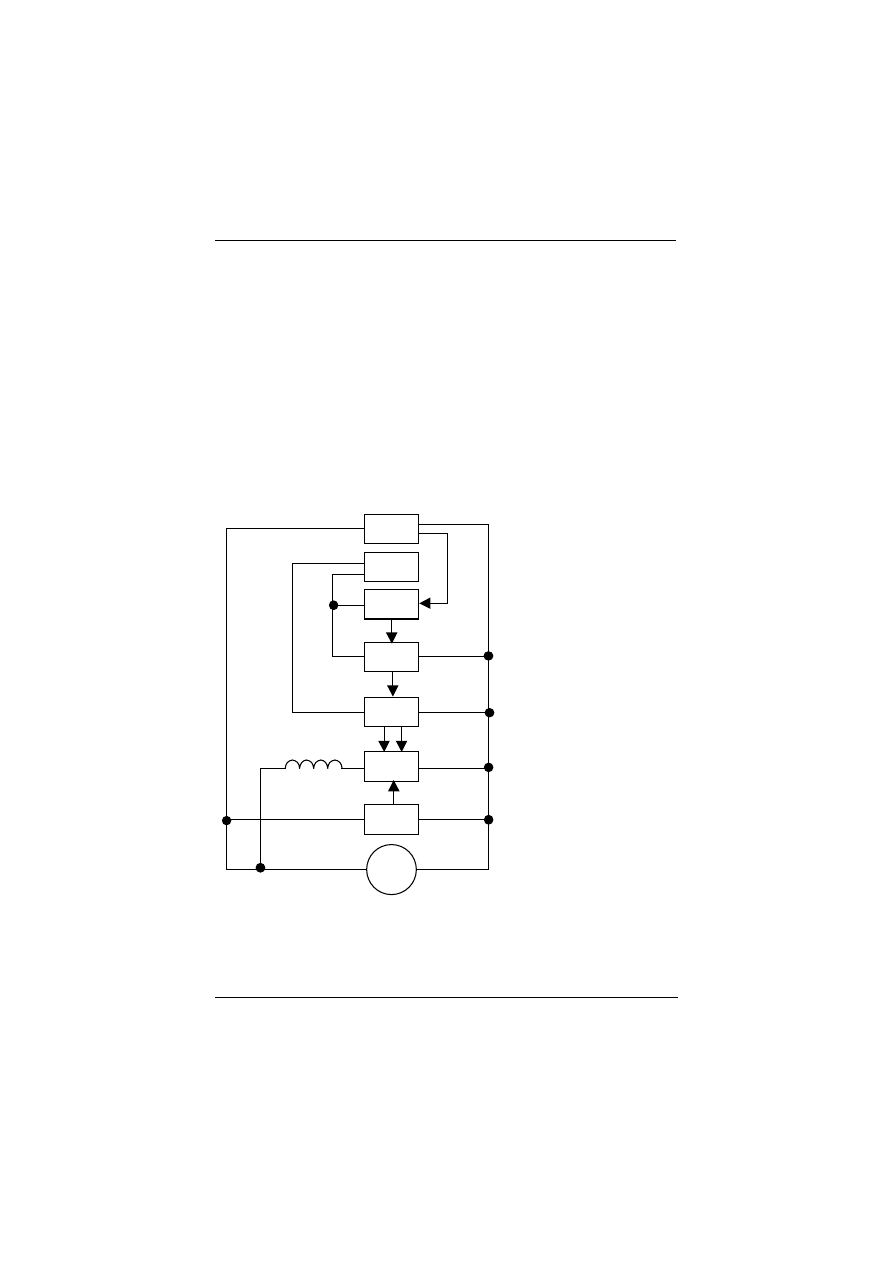
Laboratorium Aparatów Elektrycznych @KEMOR
78
1.3. ZASADA
EKSPLOATACJI REGULATORA NAPIĘCIA
Regulator napięcia BRN-3a jest urządzeniem statycznym, bezstyko-
wym nie wymagającym określonej konserwacji poza oczyszczeniem przy
pomocy sprężonego powietrza z kurzu. Regulator przystosowany jest do
pracy w położeniu pionowym zaciskami przyłączeniowymi w dół. Pozycja
taka konieczna jest ze względu na zapewnienie właściwego obiegu powie-
trza chłodzącego. W pobliżu regulatora nie należy montować urządzeń
utrudniających obieg powietrza oraz uniemożliwiających dostęp do regula-
tora z przodu i z dołu. Należy bezwzględnie przestrzegać zgodności połą-
czeń regulatora z prądnicą, gdyż w przeciwnym przypadku praca regulatora
będzie nieprawidłowa. Jeżeli bezpiecznik ulegnie uszkodzeniu należy go
zastąpić bezpiecznikiem oryginalnym.
1
2
7
6
5
4
8
3
2
1
+
−
Schemat blokowy regulato-
ra napięcia BRN-3a
Opis części składowych
rysunku:
1. Prądnica
2. Człon startowy 3
3. Człon wykonawczy
4. Wzmacniacze koń-
cowe
5. Przerzutnik Schmitta
6. Wzmacniacz wstępny
7. Zasilacz stabilizowa-
ny
8. Człon pomiarowy
W celu zapewnienia prawidłowej pracy regulatora napięcia należy
w zależności od warunków eksploatacji, co najmniej raz na dwa lata prze-
Laboratorium Aparatów Elektrycznych @KEMOR
79
prowadzić przegląd regulatora. W czasie przeglądu powinny być poddane
sprawdzeniu następujące parametry:
•
dokładność regulacji napięcia przy zmianach prądu obciążenia od 0
do 1.5In.
•
zmiana nastawienia poziomu napięcia prądnicy, korekta nastawienia
poziomu powinna wynosić 110V ±3%
•
działanie układu zabezpieczenia nadnapięciowego, wartość napięcia
prądnicy w momencie załączenia dodatkowego tyrystora TY3 po-
winna wynosić 120V ±5V. Ponadto przekaźnik nadnapięciowy po-
winien zadziałać przy napięciu prądnicy 130V ±5V,
•
działanie przekaźnika rozruchowego, powinien działać w zakresie
napięcia prądnicy od 35 do 50V.
1.4. ZASADA
DZIAŁANIA REGULATORA NAPIĘCIA
Regulacja napięcia prądnicy odbywa się przez impulsowe zasilanie
uzwojenia wzbudzenia za pośrednictwem członu wykonawczego opartego
na tyrystorach: TY1, TY2, TY3.
Schemat blokowy regulatora napięcia przedstawiony został na ry-
sunku poniżej. Praca regulatora odbywa się przy ustalonej stałej wartości
napięcia (Up). W miarę zmian prędkości obrotowej i prądu obciążenia
prądnicy (G) zmienia się wartość napięcia.
Wartość ta mierzona jest przez człon pomiarowy (cz.p.) i podawana
przez wzmacniacz wstępny (w.w.) na człon formowania impulsów oparty
na przerzutniku Schmitta (P). Z kolei uformowany sygnał podawany jest
przez wzmacniacz końcowy na człon wykonawczy. Członem wykonaw-
czym jest przekształtnik tyrystorowy. Jeżeli napięcie Up przekroczy ustalo-
ną wartość 110 V, to impuls z układu sterowania przekazany zostanie na ty-
rystor pomocniczy TY2. Odblokowanie tyrystora TY2 powoduje zabloko-
wanie tyrystora głównego TY1. Wówczas prąd wzbudzenia maleje ze stałą
czasu obwodu wzbudzenia i maleje również napięcie prądnicy (G). Jeżeli
napięcie prądnicy osiągnie wartość 110 V, to człon pomiarowy spowoduje
przeciwną do poprzedniej zmianę stanu przerzutnika Schmitta, a impuls
z układu sterowania zostanie przekazany na tyrystor główny TY1 i zostanie
on odblokowany. Natomiast prąd w obwodzie wzbudzenia i napięcie prąd-
nicy (G) zaczną wzrastać. Dalsze cykle pracy powtarzają się w zależności
od obciążenia prądnicy i jej prędkości obrotowej.
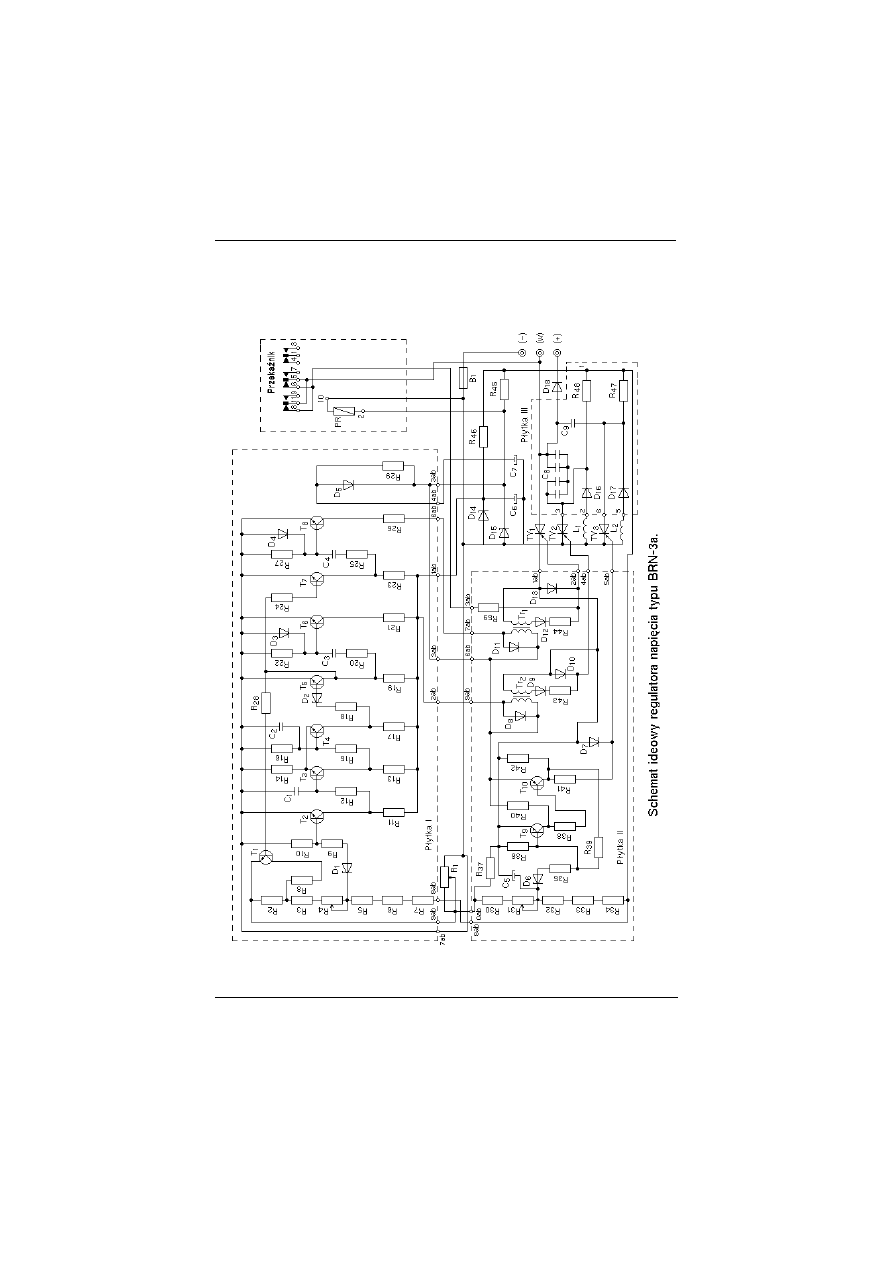
Laboratorium Aparatów Elektrycznych @KEMOR
80
Laboratorium Aparatów Elektrycznych @KEMOR
81
Z uwagi na możliwość wystąpienia zakłóceń w pracy przekształtni-
ka, powodowanych stanami nieustalonymi i przepięciami w obwodzie
prądnicy oraz z uwagi na ewentualne uszkodzenia regulatora, w prze-
kształtniku zastosowano obwód z dodatkowym tyrystorem TY3.
Odblokowanie dodatkowego tyrystora TY3 następuje przy poziomie
napięcia prądnicy Up wynoszącym około 120 V. Gdy zakłócenie jest
chwilowe wówczas zadaniem dodatkowego tyrystora TY3 jest przywróce-
nie normalnego rytmu pracy przekształtnika. Przy trwałym uszkodzeniu re-
gulatora napięcia dalszą pracę awaryjną regulatora umożliwia dodatkowy
tyrystor TY3. Praca charakteryzuje się nieco podwyższonym napięciem
prądnicy około 115 V i znacznie niższą częstotliwością impulsowania. Ni-
ska częstotliwość powodująca migotanie świateł lampek kontrolnych
umożliwia obsłudze zorientowanie się, że regulator napięcia uległ uszko-
dzeniu.
1.5. STANY PRACY REGULATORA NAPIĘCIA
W pracy regulatora napięcia BRN-3a można rozróżnić trzy fazy:
•
rozruch,
•
pracę normalną na poziomie 110 V,
•
pracę w stanach awaryjnych.
1.6. ROZRUCH I NORMALNA PRACA REGULATORA NAPIĘ-
CIA
Z chwilą uruchomienia prądnicy na jej zaciskach pojawia się napię-
cie szczątkowe o niewielkiej wartości. W tym czasie bramka tyrystora TY1
otrzymuje zasilanie poprzez zwarte styki 5-6 i 8-11 przekaźnika PR
i rezystor R59. Następuje przepływ prądu w obwodzie bramki, a tym sa-
mym odblokowuje tyrystor załączający TY1. Spowodowany tym przepływ
prądu wzbudzenia prądnicy prowadzi do szybkiego wzrostu napięcia na jej
zaciskach. Przy napięciu od 35 do 55 V następuje zadziałanie przekaźnika
PR, którego styki przerywają obwód zasilania bramki tyrystora TY1.
Z chwilą, gdy napięcie prądnicy osiągnie wartość Un±3% rozpoczyna się
normalna praca regulatora. Okres pracy regulatora napięcia BRN-3a zawie-
ra się w granicach od 10 do 40 ms dla znamionowych warunków pracy
prądnicy. Podczas wzbudzenia się prądnicy ładują się również kondensatory
gaszące i kondensator .
Laboratorium Aparatów Elektrycznych @KEMOR
82
1.7. PRACA AWARYJNA REGULATORA NAPIĘCIA
Awaryjna praca regulatora napięcia wystąpi wtedy, kiedy zawiedzie
podstawowy układ sterowania regulatora lub tyrystorów człon wykonaw-
czy, wówczas podejmie pracę dodatkowy układ gaszący.
Jeżeli jednorazowo (przy silnym zakłóceniu w obwodzie prądnicy
np. napięcia) lub trwale (przy uszkodzeniu członu sterowniczego) nie nastą-
pi zablokowanie tyrystora TY1 wówczas napięcie prądnicy narasta powyżej
110V. Przy napięciu ok. 120V następuje odblokowanie tranzystorów T9,
T10. Jeżeli zakłócenie było chwilowe, regulator napięcia powraca do swojej
normalnej pracy. Przy trwałym uszkodzeniu w regulatorze napięcia rozpo-
czyna się praca awaryjna z udziałem tyrystora TY3.
Praca ta charakteryzuje się nieco podwyższonym napięciem prądnicy
około 115 V i znacznie niższą częstotliwością. Niska częstotliwość powo-
dująca migotanie świateł i przyrządów pomiarowych umożliwia obsłudze
zorientowanie się, że regulator napięcia uległ uszkodzeniu. Oczywiście mo-
że on pracować aż do ukończenia cyklu pracy. Następnie regulator należy
naprawić.
2. STANOWISKO
LABORATORYJNE
2.1. PODSTAWOWE PARAMETRY TECHNICZNE REGULATO-
RA NAPIĘCIA
•
typ regulatora
BRN-3a
•
znamionowe napięcie pracy
110V
•
maksymalny prąd wzbudzenia prądnicy 4.5A
•
dokładność regulacji napięcia
±2.5V
•
rodzaj pracy
ciągła C
•
znamionowe napięcie izolacji
250V
•
zakres temperatur otoczenia 238K ÷ 328K (-35°C ÷ +58°C)
Wyrób spełnia wymagania WTO-73/A 31-032. Praca w pozycji pio-
nowej. Dopuszczalne odchylenie 10°. Regulator powinien zapewnić samo-
wzbudzenie prądnicy od 3.5 V jej napięcia szczątkowego.
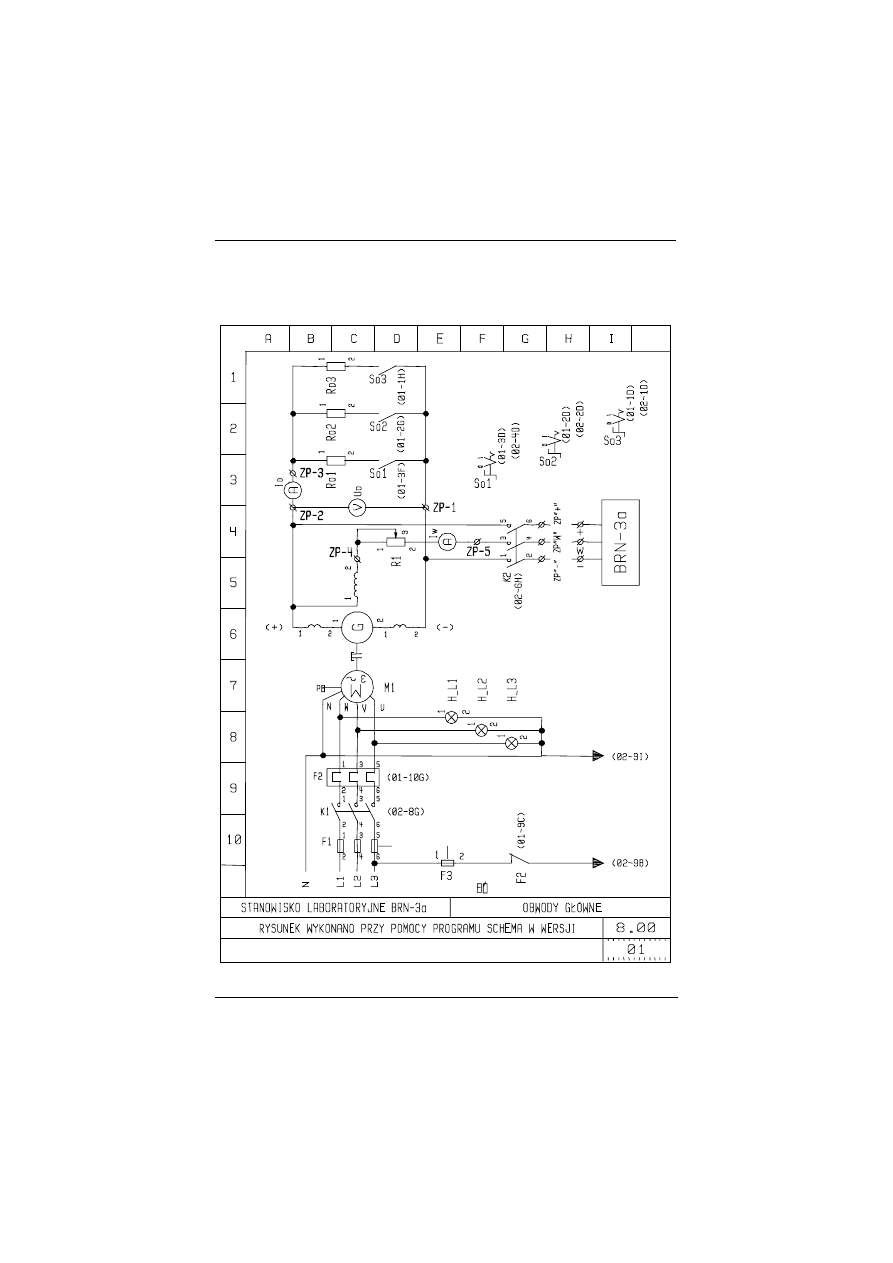
Laboratorium Aparatów Elektrycznych @KEMOR
83
2.2. STANOWISKO
POMIAROWE
2.2.1. Obwody główne
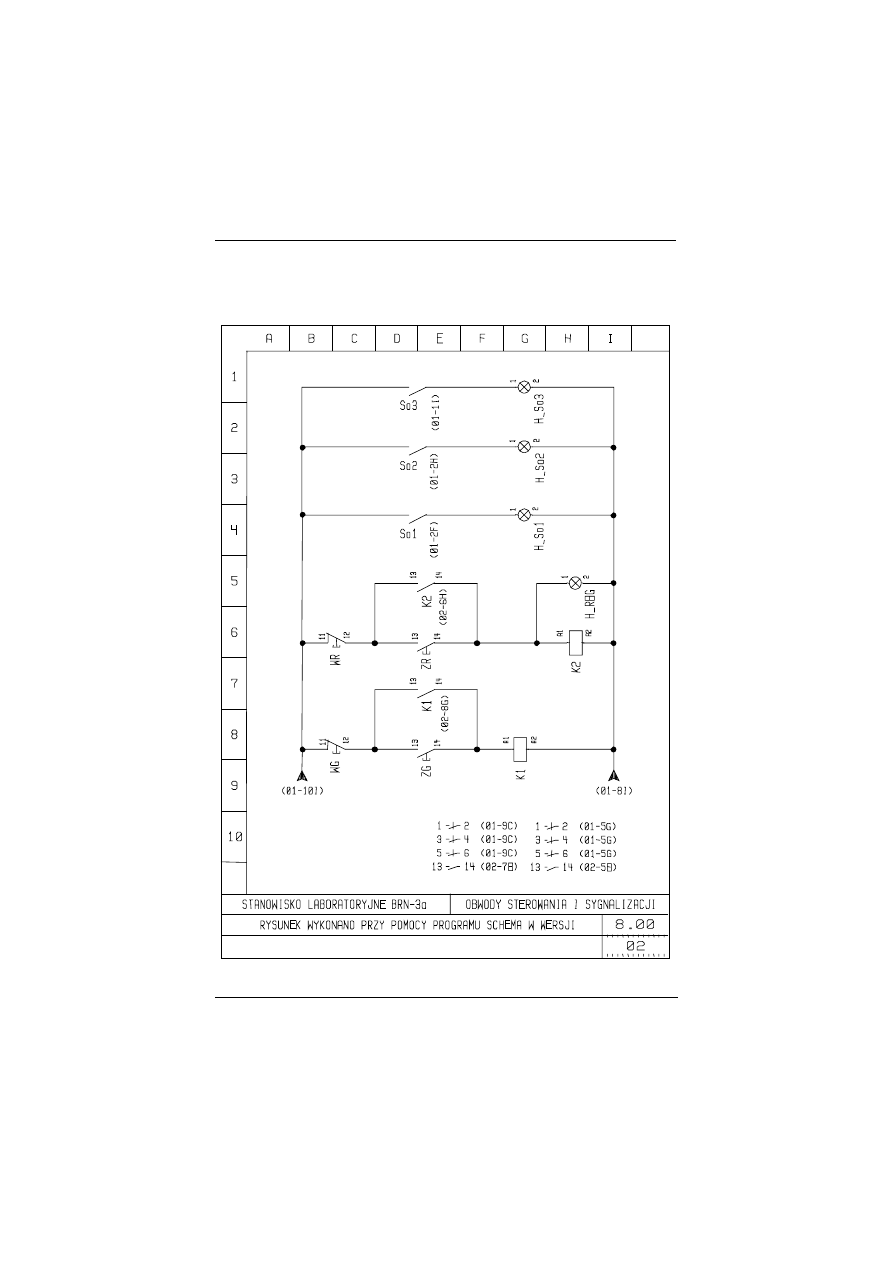
Laboratorium Aparatów Elektrycznych @KEMOR
84
2.2.2. Obwody sterowania i sygnalizacji
Laboratorium Aparatów Elektrycznych @KEMOR
85
3. PROGRAM
ĆWICZENIA
Uczelnia
LABORATORIUM
Aparatów Elektrycznych
Data
Grupa
Rok akademicki
Imi
ę i
nazwisk
o
Zespół
Ocena
Temat
Badanie bezstykowego regulatora BRN-3a
1. CEL
ĆWICZENIA
Celem ćwiczenia jest:
• zapoznanie się z budową regulatora napięcia BRN-3a,
• badanie pracy regulatora napięcia,
• badanie współpracy regulatora napięcia BRN-3az prądnicą prądu sta-
łego.
Podczas wykonywania ćwiczenia należy pamiętać o podłączeniu od-
powiedniego obwodu i o odpowiednim doborze przyrządów pomiarowych.
2. WYKAZ
PRZRZĄDÓW
• MEGAOMOMIERZ - do pomiaru rezystancji izolacji regulatora na-
pięcia
• AMPEROMIERZ - do pomiaru prądu wzbudzenia prądnicy o zakresie
od 0 do 2.5A
• AMPEROMIERZ - do pomiaru prądu obciążenia prądnicy(0 do 8A)
• WOLTOMIERZ - do pomiaru napięcia prądnicy (0 do 150V)
• REZYSTOR SUWAKOWY - (300 Ohm/0.5A)
Laboratorium Aparatów Elektrycznych @KEMOR
86
3. DANE
ZAMIONOWE
Przed rozpoczęciem ćwiczenia należy zapoznać się z charakterystycz-
nymi danymi silnika klatkowego i prądnicy bocznikowej umieszczonymi na
tabliczce znamionowej oraz na regulatora BRN-3a, zapisać je oraz dokonać
oględzin zewnętrznych. Na ich podstawie dobrać odpowiednie przyrządy
pomiarowe.
4. PRZEBIEG
POMIARÓW
4.1. Próba rozruchu prądnicy
Przed przystąpieniem do rozpoczęcia ćwiczenia grupa pomiarowa po-
winna:
• Zapoznać się ze schematami ideowym i montażowym stanowiska la-
boratoryjnego.
• Sprawdzić stan połączeń regulatora napięcia z pozostałymi elementa-
mi układu pomiarowego.
• Połączyć przyrządy wchodzące w skład obwodu elektrycznego ćwi-
czenia (zaciski: ZP-1 i ZP-2; ZP-2 i ZP-3; ZP-4 i ZP-5).
Rozruch prądnicy odbywa się bez podłączenia regulatora napięcia
BRN-3a, więc należy połączyć zaciski: ZP”
−” i ZP”w”. Przyciskiem ZG
należy włączyć silnik prądu zmiennego napędzający prądnicę prądu stałego.
Silnik wraz z prądnicą zaczną pracować. Początkowo na woltomierzu Vo
pojawi się napięcie pochodzące od magnetyzmu szczątkowego biegunów
prądnicy. Następnie przyciskiem sterowniczym ZR należy włączyć do pra-
cy stycznik K2, a tym samym obwód uzwojenia wzbudzenia prądnicy zo-
stanie zamknięty.
Wykonać trzykrotny rozruch prądnicy i stwierdzić, czy nastąpiło
wzbudzenie się prądnicy i regulator pracuje na poziomie napięcia 110V.
Wynik próby należy uznać za pozytywny, jeżeli prądnica wzbudza się za
każdym razem i utrzymuje napięcie na poziomie 110V.
Na woltomierzu można zaobserwować wzrost napięcia na zaciskach
prądnicy. Jednocześnie w uzwojeniu wzbudzenia prądnicy zaczyna płynąć
prąd I
W
, co można zaobserwować na amperomierzu.
Wcześniej zostały podane wartości napięcia, przy których ma odpo-
wiednio pracować przekaźnik PR.
Po dokonaniu powyżej wymienionych czynności grupa pomiarowa
może rozpocząć ćwiczenie.
Laboratorium Aparatów Elektrycznych @KEMOR
87
4.2. Wyznaczenie charakterystyki biegu jałowego prądnicy
Zmniejszając wartość rezystancji na zaciskach ZP-4 i ZP-5 (zwięk-
szając prąd wzbudzenia) obserwować zmiany napięcia twornika prądnicy.
Wyniki zanotować w tabeli i narysować charakterystykę biegu jałowego
U
0
=f(Iw).
Tabela pomiarowa
Prąd wzbudzenia
Napięcie twornika
Lp.
I
W
[A]
U
0
[V]
4.3. Wyznaczenie charakterystyki zewnętrznej prądnicy
4.3.1. U
0
=f(Io) z wyłączonym regulatorem napięcia
Pomiary należy wykonać z odłączonym regulatorem napięcia (zaciski:
ZP”
−” i ZP”w” są zwarte) i dla trzech różnych wartościach prądu obciąże-
nia.
Tabela pomiarowa
Prąd obciążenia
Napięcie twornika
Lp.
I
0
[A]
U
0
[V]
4.3.2. U
0
=f(Io) z podłączonym regulatorem napięcia BRN-3a w obwód
uzwojenia wzbudzenia prądnicy.
Należy rozewrzeć uprzednio zwarte styki ZP"-" i ZP"w", podłączyć
regulator napięcia (tzn. ZP"+" z "+", ZP"w" z "w" oraz ZP"-" z "-"), uru-
chomić prądnicę i wykonać pomiary.
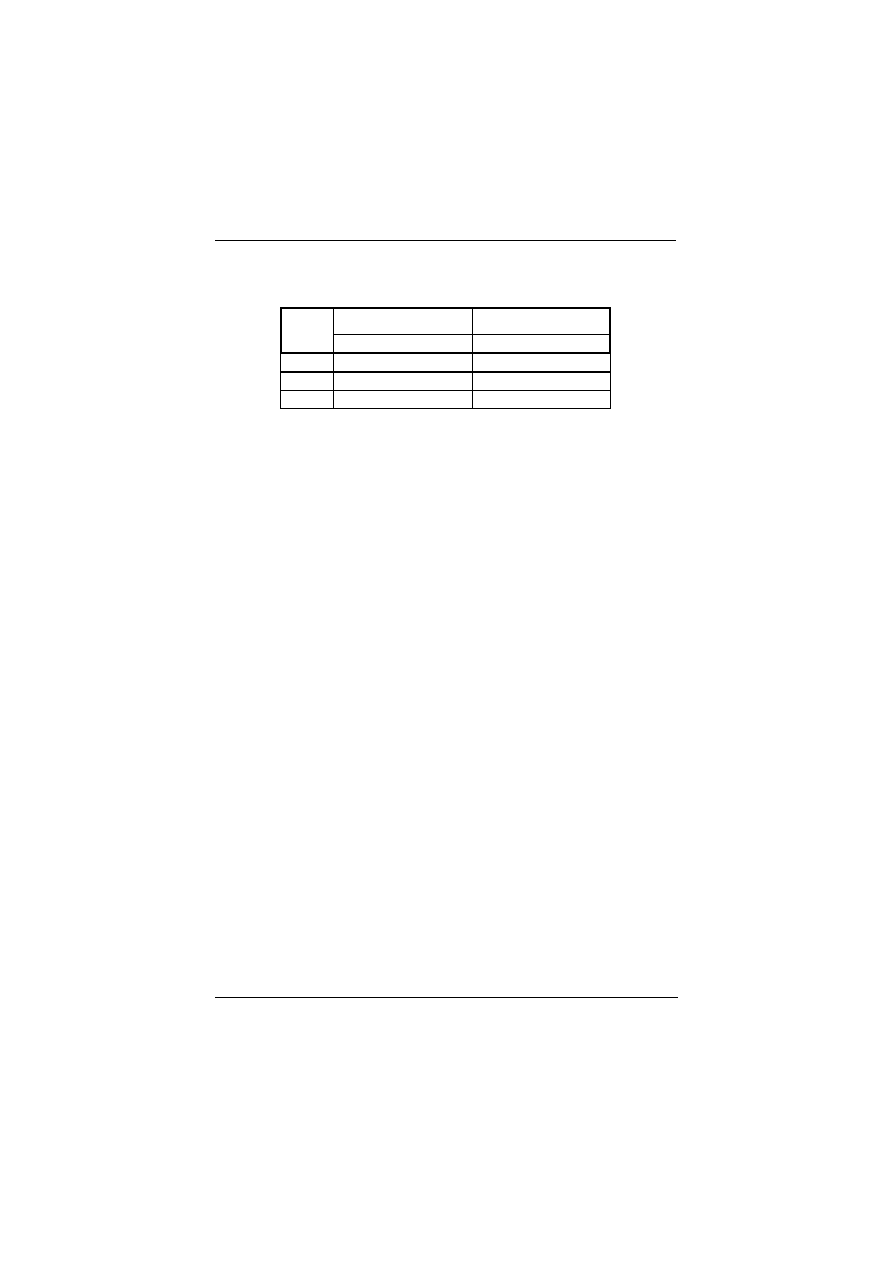
Laboratorium Aparatów Elektrycznych @KEMOR
88
Tabela pomiarowa
Prąd obciążenia
Napięcie twornika
Lp.
I
0
[A]
U
0
[V]
5. UWAGI I WNIOSKI
Przeprowadzić analizę regulacji prądnicy bocznikowej prądu stałego
w przypadku braku i z podłączonym regulatorem napięcia BRN-3a. Wska-
zać różnice i zalety.
6. WYKRESY
Wykreślić charakterystyki wg pkt. 4 z opisem charakterystycznych
wielkości. Charakterystyki zewnętrzne prądnicy zamieścić na jednym wy-
kresie.
Laboratorium Aparatów Elektrycznych @KEMOR
89
ĆWICZENIE NR VI
BADANIE SKUTECZNOŚCI ZE-
ROWANIA
Laboratorium Aparatów Elektrycznych @KEMOR
90
1. WIADOMOŚCI TEORETYCZNE
1.1. WIADOMOŚCI OGÓLNE
Zerowanie ochronne jest to środek ochrony przeciwporażeniowej
dodatkowej, polegający na połączeniu metalowych części urządzeń
i odbiorników elektrycznych (podlegających ochronie) z uziemionym prze-
wodem ochronnym PE lub przewodem ochronno-neutralnym PEN. Powo-
duje to samoczynne odłączenie zasilania w warunkach zakłóceniowych.
Zerowanie ochronne wolno stosować w sieciach prądu przemienne-
go przystosowanych do zerowania o napięciu znamionowym nie przekra-
czającym 500V.
Zasada działania zerowania pokazana jest na rysunku 1.
W przypadku zwarcia przewodu fazowego z zerowaną obudową odbiornika
następuje zamknięcie obwodu elektrycznego dla prądu zwarciowego I
z
po-
przez przewód ochronny PE, przewód ochronno-neutralny PEN, punkt neu-
tralny transformatora oraz przewód fazowy, na którym nastąpiło zwarcie.
Płynący w tym obwodzie (w tzn. pętli zwarcia) prąd zwarciowy I
z
powinien
spowodować zadziałanie zabezpieczenia, np. przepaleniem wkładki topi-
kowej bezpiecznika, a tym samym odłączenie zasilania. Aby wolno było
zastosować zerowanie, to sieć musi być przystosowana do zerowania, tzn.
spełniać następujące warunki :
•
Punkt neutralny transformatora po stronie niskiego napięcia musi
mieć uziemienie robocze bezpośrednie o wartości R
r
≤
5
Ω.
•
Przewód ochronno-neutralny PEN lub przewód ochronny PE musi
mieć liczne uziemienia robocze dodatkowe.
•
Przewód ochronno-neutralny PEN i przewód ochronny PE powinny
mieć niezawodną ciągłość metaliczną między punktem neutralnym
transformatora a zerowanym odbiornikiem.
•
Przewody ochronne powinny posiadać odpowiednie przekroje i spo-
sób prowadzenia w stosunku do przewodów fazowych.
•
Linie i obwody powinny być wyposażone w zabezpieczenia nadprą-
dowe, działające samoczynnie i selektywnie, które w przypadku
zwarcia przewodu fazowego z przewodem PEN lub PE albo czę-
ściami urządzeń objętych ochroną dostatecznie szybko wyłączą ob-
wód, w którym nastąpiło zwarcie.
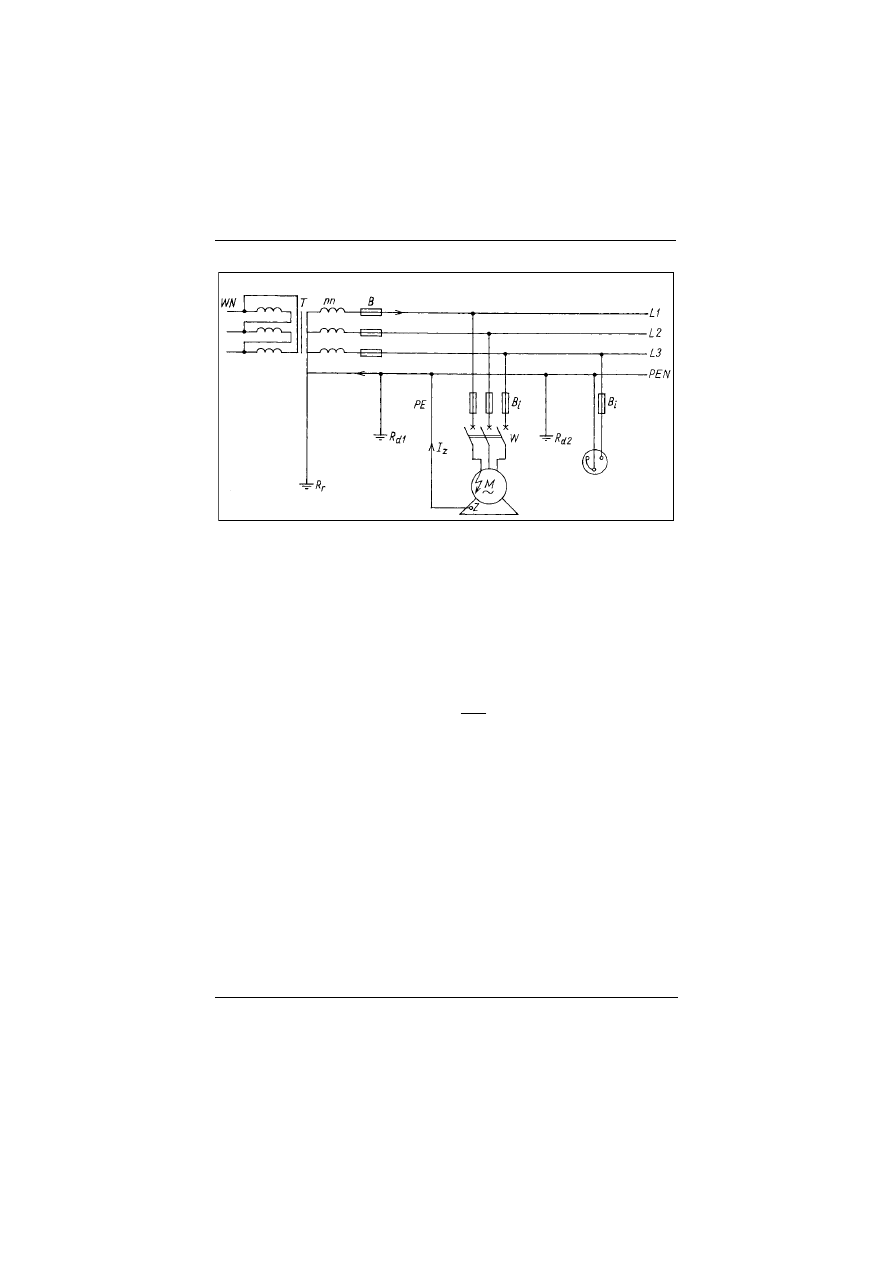
Laboratorium Aparatów Elektrycznych @KEMOR
91
Rys.1. Zasada zerowania.
Celem zerowania jest ochrona przed porażeniem, a uzyskuje się to
przez zadziałanie zabezpieczeń nadprądowych, albo przez ograniczenie na-
pięć dotykowych do wartości dopuszczalnych.
Wyłączenie uszkodzonego przewodu lub odbiornika nastąpi wtedy,
gdy impedancja pętli zwarcia tego obwodu nie będzie większa od impedan-
cji dopuszczalnej określonej wzorem :
W
F
DOP
I
U
Z
=
gdzie :
Z
DOP
- dopuszczalna impedancja pętli zwarcia w [
Ω],
U
F
- napięcie fazowe sieci zasilającej w [V],
I
W
- prąd dostatecznie szybkiego wyłączenia w [A]:
N
W
I
k
I
⋅
=
Wartość współczynnika k oraz określenie prądu I
N
zostały podane
w tabeli 1. Maksymalne dopuszczalne czasy zadziałania zabezpieczeń pod-
czas zwarcia przedstawia tabela 2.
Laboratorium Aparatów Elektrycznych @KEMOR
92
Tabela 1.
Lp
Urządzenie samoczynne odłączające zasilanie
k
I
N
Bezpiecznik
1. Instalacyjny z wkładką topikową szybką:
a. na prąd znamionowy do 35 A
2,5
b. na prąd znamionowy od 45 do 100A
3,0
c. na prąd znamionowy od 125 do 200A
3,5
2. Instalacyjny z wkładką topikową zwłoczną:
a. na prąd znamionowy do 16A
3,5
b. na prąd znamionowy od 20 do 25A
4,0
c. na prąd znamionowy od 32 do 63A
4,5
d. na prąd znamionowy od 80 do 100A
5,0
3. Instalacyjny z wkładką topikową o działaniu szybko-
zwłocznym
a. na prąd znamionowy do 50A
4,5
b. na prąd znamionowy od 63 do 100A
6,0
4. Wielkiej mocy z wkładką topikową szybką
a. na prąd znamionowy do 25A
3,2
b. na prąd znamionowy od 32 do 200A
4,0
5. Wielkiej mocy z wkładką topikową zwłoczną
a. na prąd znamionowy do 10A
5,0
b. na prąd znamionowy od 16 do 50A
5,5
c. na prąd znamionowy od 63 do 100A
6,0
d. na prąd znamionowy od 125 do 250A
6,5
1.
e. na prąd znamionowy od 400 do 500A
7,0
Prąd znamio-
nowy wkładki
bezpieczni-
kowej
2.
Wyłącznik zgodnie z normą PN/E-06150 wyposażony w
wyzwalacze lub przekaźniki bezzwłoczne
1,2
Prąd nastaw-
czy wyzwala-
cza lub prze-
kaźnika zwar-
ciowego
Wyłącznik instalacyjny nadmiarowy zgodnie z normą
PN/E-93002:
1. Typ L:
a. na prąd znamionowy do 10A
5,2
b. na prąd znamionowy od 16 do 25A
4,9
c. na prąd znamionowy od 32 do 63A
4,5
2. Typ U:
a. na prąd znamionowy do 10A
12,0
b. na prąd znamionowy od 16 do 25A
11,2
c. na prąd znamionowy od 32 do 63A
10,4
3. Typ K
10,0
3.
4. Typ D
50,0
Prąd znamio-
nowy wyłącz-
nika
4.
Wyłącznik przeciwporażeniowy różnicowoprądowy
1,2
Wyzwalający
prąd różnico-
wy
Laboratorium Aparatów Elektrycznych @KEMOR
93
Tabela 2.
Maksymalny czas odłączenia napięcia T
s
w s
Lp
Napięcie pomiędzy
przewodem skraj-
nym a ziemią w [V] Warunki środowiskowe
1
*)
Warunki środowiskowe
2
**)
1.
2.
3.
4.
120
235
400
580
0,8
0,4
0,2
0,1
0,4
0,2
0,1
0,1
*) Warunki środowiskowe 1 są to warunki, w których rezystancja ciała ludzkie-
go w stosunku do ziemi wynosi co najmniej 1000
Ω.
**) Warunki środowiskowe 2 są to warunki, w których rezystancja ciała ludzkiego
w stosunku do ziemi wynosi mniej niż 1000
Ω.
Przewód ochronny sieci przystosowanej do zerowania powinien
mieć dodatkowe uziemienia robocze. Konieczność stosowania dodatko-
wych uziemień roboczych wynika stąd, że w przypadku przerwy w przewo-
dzie np. ochronno-neutralnym PEN i jednoczesnym wystąpieniu zwarcia
pomiędzy przewodem fazowym a zerowaną częścią urządzenia, pojawia się
na wszystkich elementach metalowych urządzenia napięcie fazowe U
f
i będzie ono trwało dostatecznie długo. Przypadek taki pokazany jest na ry-
sunku 2. Jeżeli natomiast przewód ochronno-neutralny będzie miał liczne
uziemienia robocze dodatkowe (rysunek 3) , to w przypadku jak wyżej, na
uszkodzonym urządzeniu będzie panowało napięcie
U= I
Z
R
WYP
i będzie
ono znacznie mniejsze od napięcia fazowego ( U < U
f
).
Rezystancja każdego z dodatkowych uziemień roboczych nie może
przekraczać 30
Ω. Natomiast wypadkowa wartość rezystancji wszystkich
uziemień roboczych sieci nie powinna przekraczać 5
Ω oraz wartości obli-
czonej ze wzoru :
ZZ
WYP
I
65
R
=
gdzie :
R
WYP
- wartość rezystancji wypadkowej w sieci ,
I
ZZ
- prąd zwarcia doziemnego w sieci po stronie górnego na-
pięcia transformatora w [A].
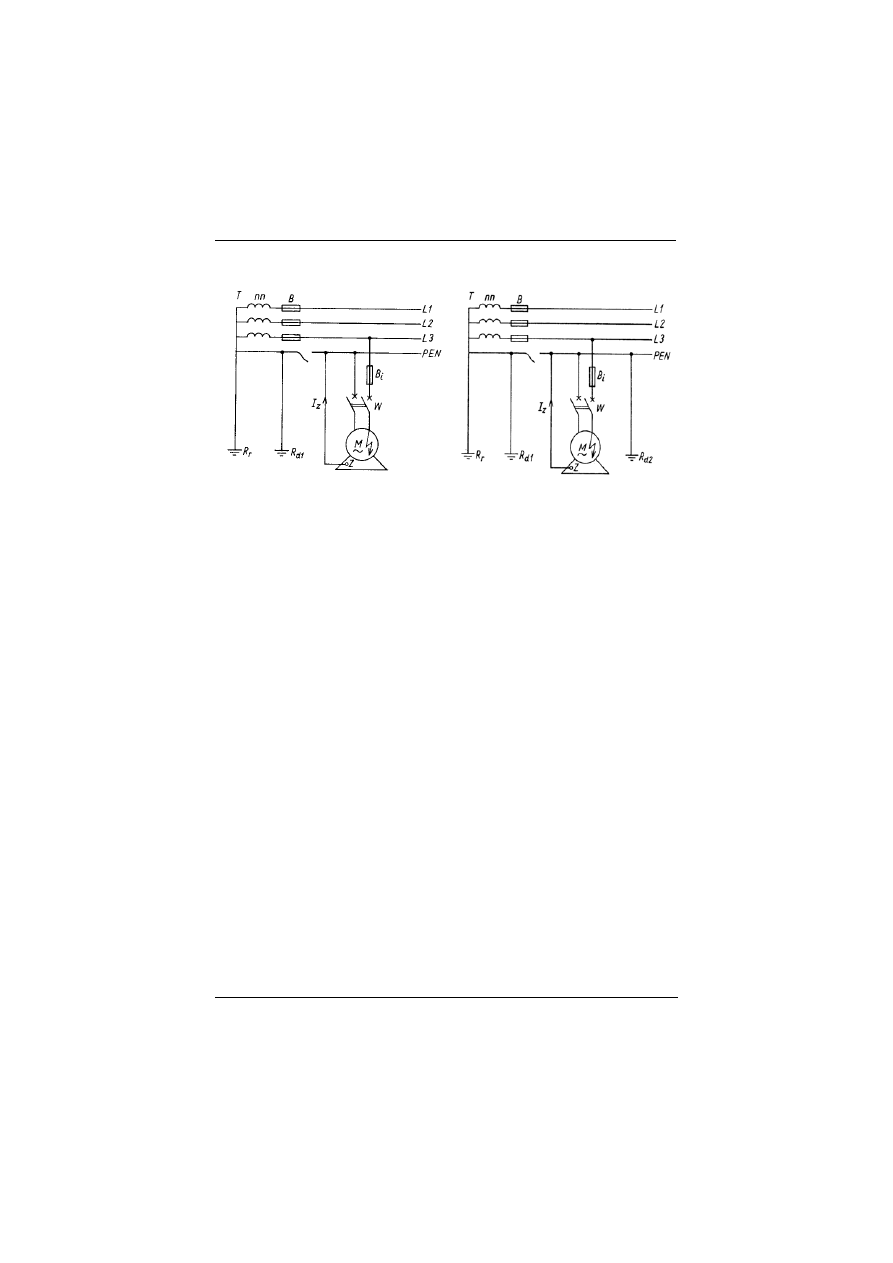
Laboratorium Aparatów Elektrycznych @KEMOR
94
Rys.2. Przypadek zerowania tylko
z jednym uziemieniem robo-
czym dodatkowym i przerwą
przewodu ochronnoneutralne-
go.
Rys.3. Przypadek zerowania
z dwoma uziemieniami robo-
czymi dodatkowymi i prze-
rwa przewodu ochronnoneu-
tralnego.
Metody badań skuteczności zerowania
W praktyce eksploatacyjnej stosuje się zwykle pośrednie metody
wyznaczania prądu zwarciowego, oparte na pomiarach impedancji pętli
zwarciowej które można podzielić:
a) przy odłączeniu badanego obwodu od źródła zasilania
Badanie (a) polega na pomiarze impedancji metodą pośrednią (tech-
niczną) za pomocą amperomierza i woltomierza, przy czym badany ob-
wód zasila się z pomocniczego źródła prądu przemiennego o obniżonym
napięciu, np. 24 V. Pomocnicze źródło prądu (transformator o prze-
kładni 220/24V) przyłącza się do szyn zbiorczych rozdzielnicy głównej
niskiego napięcia, od których na czas pomiaru odłączony jest badany
obwód zerowania. Pomiary takie powodują przerwy w zasilaniu odbior-
ników i z tego powodu w badaniach eksploatacyjnych nie są stosowane.
b) w czasie pracy urządzenia.
Badania (b) polegają na pomiarach impedancji pętli zwarciowej przy
wykonaniu celowego zwarcia fazy z zerowaną częścią przez rezystor
ograniczający natężenie prądu zwarciowego.
Ze względu na wartość prądu przemiennego rozróżnia się metody :
•
małoprądowe
I < 1A ,
•
średnioprądowe
1A
≤ I ≤ 20A ,
•
wielkoprądowe
I > 50A .
Laboratorium Aparatów Elektrycznych @KEMOR
95
Ze względu na rodzaj układu mierzącego rozróżnia się metody:
kompensacyjne, porównawcze , mostkowe, różnicowe i inne.
Do budowania skuteczności zerowania stosuje się wiele mierników
produkcji polskiej, np. MZ - 3 , MZK - 2 , MZW - 5 , MPZ - 1 .
1.2. BADANIE
SKUTECZNOŚCI ZEROWANIA MIERNIKIEM TY-
PU MOZ
1.2.1. Wiadomości ogólne o mierniku
Miernik oporu zwarciowego typu MOZ przeznaczony jest do pomia-
ru rezystancji pętli zwarcia obwodu jednofazowego z uzwojenia transfor-
matora zasilającego, przewodu fazowego z bezpiecznikiem i przewodu ze-
rowego w urządzeniach elektroenergetycznych małych i średnich mocy; w
przypadku uziemienia ochronnego w miejscu przewodu zerowego wystę-
pują dwa uziemienia : ochronne oraz punktu zerowego transformatora.
Miernik MOZ służy do sprawdzania skuteczności ochrony takich urządzeń
jak: silniki, transformatory, spawarki elektryczne, aparaty elektromedyczne,
przyrządy pomiarowe, zelektryfikowany sprzęt gospodarstwa domowego
itp. zainstalowanych w stacjach energetycznych, warsztatach, laboratoriach
i mieszkaniach. Nie wskazane jest dokonywanie pomiarów rezystancji pętli
zwarcia w obwodach, w których pracują urządzenia tyrystorowe. Przy po-
miarach w takich obiektach należy się liczyć z dodatkowymi błędami. Za-
sada działania i konstrukcja miernika MOZ pozwalają na pomiar oporu
zwarciowego szybko, wygodnie i dokładnie - bez przerywania i zakłócania
pracy urządzeń sprawdzanych.
1.2.2. Dane techniczne
• napięcie znamionowe
220V, 50Hz ,
• zakres użytkowy napięcia
187
÷ 242V ,
• zakres wskazań
0
÷50 Ω,
• wartość pierwszej działki
0.1
Ω,
• środkowa wartość podziałki
1.5
Ω,
• długość podziałki
77 mm ,
• prąd pomiarowy w pętli zwarcia
• o oporze zwarcia równym zeru
40A ,
• częstotliwość pomiarów
max. 6 na min ,
• położenie miernika
poziome z tolerancją 15
°.
Laboratorium Aparatów Elektrycznych @KEMOR
96
1.2.3. Zasada działania
Miernik oporu zwarciowego typu MOZ działa na zasadzie porówna-
nia napięcia między przewodem fazowym a zerowym lub uziemionymi czę-
ściami urządzenia elektrycznego w stanie praktycznie nieobciążonym (U
0
)
z napięciem między tymi punktami przy obciążeniu niewielką rezystancją
pomiarową (R
P
) (stan „sztucznego zwarcia”) (U
1
).
Włączenie obwodu pomiarowego odbywa się za pomocą łączników
tyrystorowych sterowanych przez układy elektroniczne uruchamiane przy-
ciskiem. Obciążenie jest włączane na jeden półokres napięcia sieci, tj.
0.01sek. Napięcie sieci nie obciążonej przyłączone jest do miernika w kilku
sąsiadujących półokresach tej samej biegunowości.
Wartości szczytowe obu napięć „zapamiętane” przy pomocy kon-
densatorów sterują wzmacniaczami tranzystorowymi, które zasilają cewki
logometru magnetoelektrycznego. Logometr wskazuje wartość rezystancji
pętli zwarciowej (R
Z
), tzn. sumę oporów: przewodu fazowego, uzwojenia
transformatora zasilającego oraz w przypadku zerowania - przewodu zero-
wego i przewodu zerującego, a w przypadku uziemienia - oporu uziemienia
transformatora zasilającego i uziemienia badanego urządzenia.
Zależność między napięciami U
0
i U
1
oraz oporami R
Z
i R
P
(opór
opornika pomiarowego) ilustruje wyrażenie :
1
1
0
P
Z
U
U
U
R
R
−
=
1.2.4. Dokładność pomiaru
Uchyb systematyczny pomiaru rezystancji pętli zwarciowej mierni-
kiem MOZ zależy od :
• dokładności wzorcowania miernika w warunkach znamionowych,
• różnic między warunkami znamionowymi a rzeczywiście istniejącymi.
Za warunki znamionowe uważa się :
• siłę elektromotoryczną SEM pętli zwarcia - 220V - 50 Hz,
• brak składowej stałej w SEM pętli zwarcia,
• kąt fazowy pętli 20° ind.,
• brak w pętli zwarcia odbiorników równoległych do miernika,
• temperaturę +20°C.
Laboratorium Aparatów Elektrycznych @KEMOR
97
Uchyb wzorcowania miernika nie przekracza 1.5% długości podział-
ki, czyli około 1 mm.
Wpływ zmian napięcia na zmianę wskazań nie przekracza w zakre-
sie 187
÷242V 1% długości podziałki (~0.7mm) na każde 10% zmiany na-
pięcia w stosunku do 220V.
Wpływ zmian temperatury na zmianę wskazań nie przekracza 2%
długości podziałki (~1.4mm) na każde 10
°C zmiany temperatury od 20°C .
Wpływ składowej stałej na zmianę wskazań nie przekracza 1% dłu-
gości podziałki (~0.7mm) na 10% zawartości składowej stałej.
W celu ograniczenia uchybów pomiaru spowodowanych wpływem
kąta fazowego pętli, wpływem mocy odbiornika przyłączonego równolegle
i wpływem miejsca przyłączenia tego odbiornika zaleca się stosować
współczynniki korekcyjne k podane w tabela 3.
Oceny mocy i miejsca przyłączenia odbiornika równoległego doko-
nuje wykonawca pomiaru zgodnie z posiadanymi informacjami.
W istniejących sieciach kąt fazowy pętli przyjmuje wartości z zakre-
su 10
°÷60° - a jego wartość rośnie wraz ze zbliżaniem miejsca pomiaru do
transformatora zasilającego sieć; w pętlach o oporze większym od 0.5
Ω kąt
fazowy praktycznie nie przekracza 40
°. Skorygowany wynik pomiaru W
K
obliczony jako iloczyn wskazania miernika W przez współczynnik k.
k
W
W
K
⋅
=
Łączny uchyb pomiaru (
∆) oporu pętli zwarciowej jest sumą geome-
tryczną uchybu wzorcowania (
∆
W
), wpływu napięcia (
∆
U
), wpływu tempe-
ratury (
∆
T
), wpływu składowej stałej (
∆
S
) napięcia, uchybu doboru współ-
czynnika k (
∆
K
) i wyraża się wzorem:
2
K
2
S
2
T
2
U
2
W
∆
+
∆
+
∆
+
∆
+
∆
=
∆
Bardzo zbliżone wartości dla
∆ otrzymujemy stosując zależność uproszczo-
ną:
)
(
7
.
0
K
S
T
U
W
∆
+
∆
+
∆
+
∆
+
∆
⋅
=
∆
Uchyb łączny dla pomiarów laboratoryjnych jest wartością stałą:
∆ = const. = 0,052 Ω
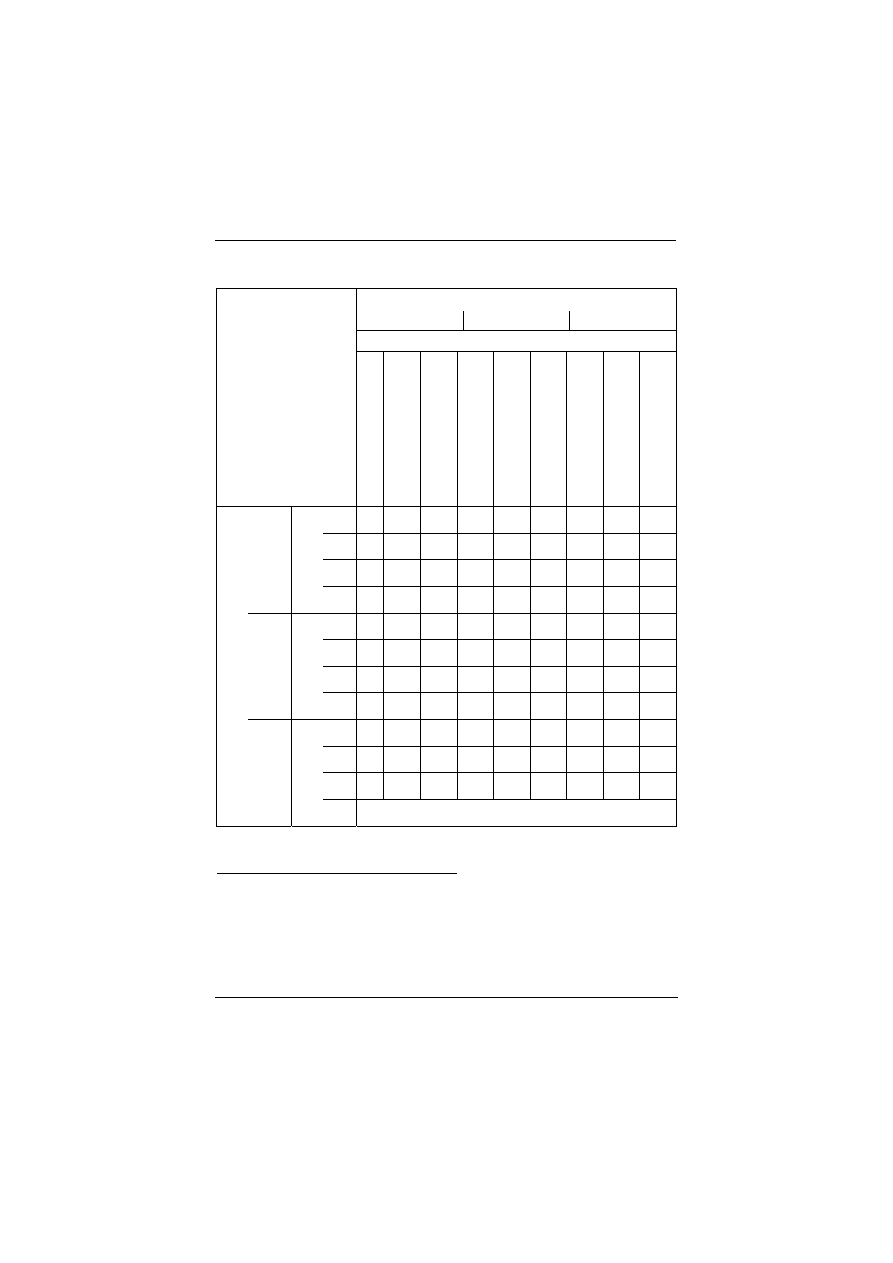
Laboratorium Aparatów Elektrycznych @KEMOR
98
Tabela 3
KĄT FAZOWY PĘTLI ZWARCIA
10
0
20
0
60
0
Odbiornik równoległy
W pobli
żu t
rans-form.
W po
łowie odleg
ło
ści
.
W pobli
żu mie
jsca
pom
.
W pobli
żu t
rans-form.
W po
ło-wie odleg
ło
ści
W pobli
żu mie
jsca
pom
.
W pobli
żu t
rans-form.
W po
łowie odleg
ło
ści
.
W pobli
żu mie
jsca
pom
.
0,2
1
1
1
1
1
1
0,97 0,97 0,97
0,5
1
1
1
1
1
1
0,91 0,91 0,91
1
1
1
1
1
1
1
0,85 0,85 0,85
Pomijalnie
ma
ła
Wskaz
anie
[
Ω
]
10
1
1,01 1,01
1
1
1
0,69 0,69 0,69
0,2
1
1
1
1
1
1
0,96 0,98 0,97
0,5
1
1
1,02
1
1
1,02 0,91 0,92 0,92
1
1
1,01 1,04
1
1,01 1,05 0,85 0,86 0,89
2500 VA
cos
ϕ =
0.
8
Wskaz
anie
[
Ω
10
1
1,14 1,62
1
1,07 1,66 0,69 0,79 1,11
0,2
1
1,01 1,08
1
1,01 1,11 0,97 0,97 1,01
0,5
1
1,06 1,26
1
1,06 1,28 0,91 0,96 1,10
1
1
1,12 1,69
1
1,13 1,75 0,86 0,93 1,47
MOC ODBIORNIKA RÓWNOLEG
Ł
EGO
25000 VA
cos
ϕ =
0.
8
Wskaz
anie
[
Ω
10
Pętla bez praktycznego znaczenia
Przykład obliczenia uchybu łącznego.
Pomiaru dokonano w pobliżu transformatora przy napięciu sieci
230V, w temperaturze otoczenia +10
°C, udział składowej stałej przyjęto -
ze względu na brak w pobliżu znanych i o dużej mocy przetworników prądu
zmiennego na prąd stały - nieznany, równy 5%, moc odbiorników równole-
głych w pętli wynosi ~25kVA, a ich cos
ϕ = 0,8, odbiorniki znajdują w po-
Laboratorium Aparatów Elektrycznych @KEMOR
99
bliżu miejsca pomiaru, wskazanie miernika było 0,5
Ω, przyjęto kąt fazowy
pętli zwarcia 60
°. Współczynnik k = 0,92 dla podanych wyżej parametrów
odczytano z tablicy 4 - skorygowany wynik pomiaru :
Ω
=
⋅
=
46
,
0
92
,
0
5
,
0
W
K
∆
W
- uchyb wzorcowania 1mm
0,025
Ω
∆
U
- wpływ napięcia 0.7mm
0,017
Ω
∆
T
- wpływ temperatury 1.4mm
0,042
Ω
∆
S
- wpływ składowej stałej 0.3mm
0,008
Ω
∆
K
- uchyb doboru współczynnika K 0%
0,000
Ω
Uchyb łączny:
Ω
=
+
+
+
+
=
∆
052
,
0
000
,
0
008
,
0
042
,
0
017
,
0
025
,
0
2
2
2
2
2
wg zależności uproszczonej:
Ω
=
+
+
+
+
⋅
=
∆
064
,
0
)
000
,
0
008
,
0
042
,
0
017
,
0
025
,
0
(
7
,
0
1.2.5. Ocena skuteczności zerowania
Dopuszczalne graniczne wartości oporu pętli zwarcia określone są
przez przepisy - najczęściej pośrednio przez podanie minimalnej wartości
prądu zwarcia - i w zależności od rodzaju urządzeń , mocy obwodu i kon-
strukcji zabezpieczeń. Tabela 5 przedstawia maksymalne wartości impe-
dancji pętli zwarcia (opracowane na podstawie przepisów aktualnych
w momencie wydania instrukcji miernika typu MOZ).
Ponieważ miernik mierzy rezystancję pętli zwarcia należy przy po-
równaniu wyników pomiaru z danymi tablicy korzystać z zależności :
rezys
cja pętli
impedancja
k ta fazoweg
tan
cos( ą
zwarcia
pętli zwarcia
o pętli)
=
Oczekiwaną wartość kąta fazowego pętli ocenić należy posługując
się wskazówkami podanymi w niniejszej instrukcji w punkcie „dokładność
pomiarów”.
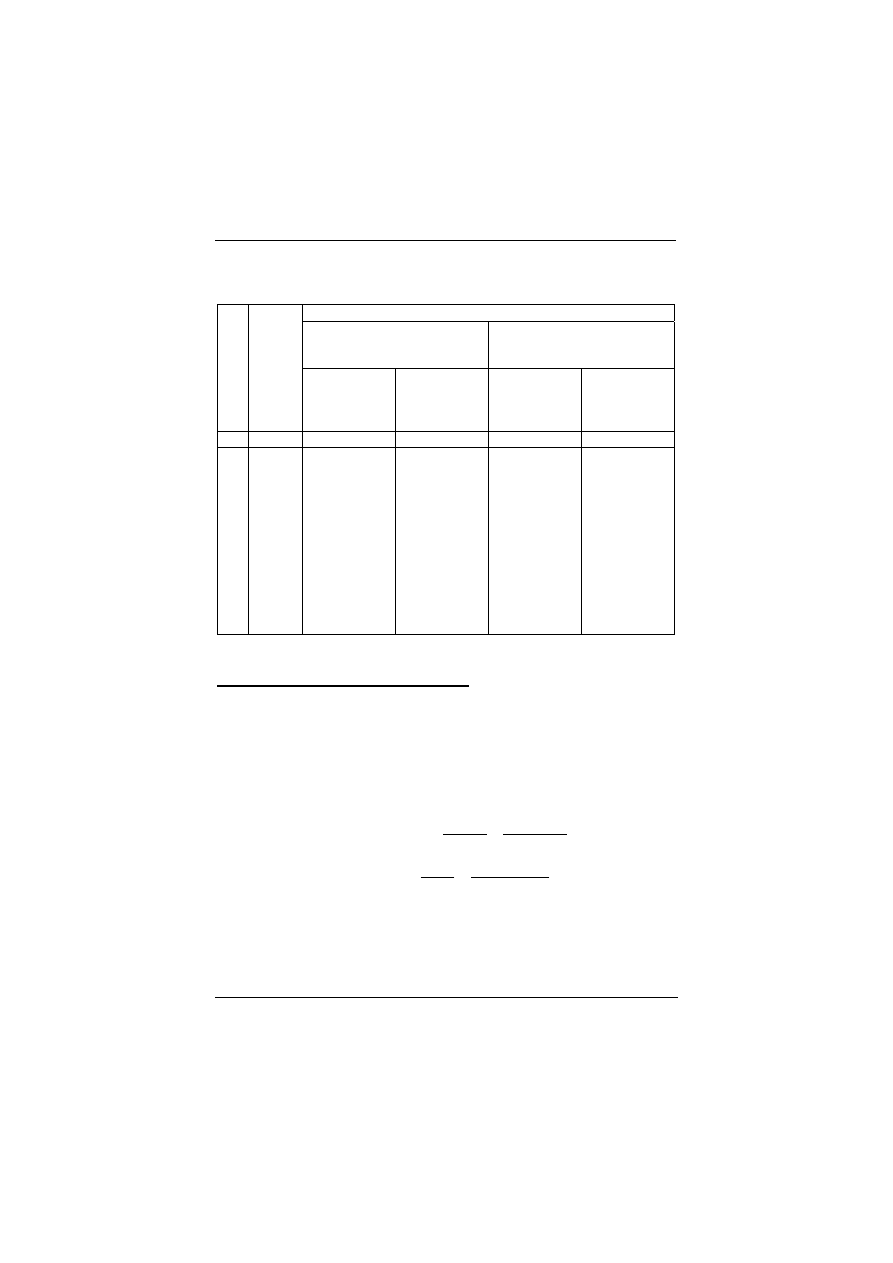
Laboratorium Aparatów Elektrycznych @KEMOR
100
Tabela 4.
Dopuszczalna maksymalna impedancja pętli zwarcia [
Ω]
Urządzenie elektroenerge-
tyczne przemysłowe i miesz-
kaniowe
Urządzenie elektroenerge-
tyczne na plecach budów
Lp
Pr
ąd z
namionowy
be
zp
ie
cz
nika topi-
kowego [A]
Bezpiecznik
z wkładką
o działaniu
szybkim
Bezpiecznik
z wkładką
o działaniu
zwłocznym
Bezpiecznik
z wkładką
o działaniu
szybkim
Bezpiecznik
z wkładką
o działaniu
zwłocznym
1
2
3
4
5
6
1
2
3
4
5
6
7
8
9
10
11
12
6
10
16
20
25
32
35
40
50
63
80
100
14,66
8,80
5,50
4,40
3,52
2,75
2,51
2,20
1,76
1,40
1,10
0,88
10,48
6,28
3,53
3,14
2,51
1,96
1,80
1,57
1,26
1,00
0,79
0,63
7,82
4,69
2,93
2,34
1,88
1,46
1,34
1,18
0,94
0,74
0,59
0,47
5,58
3,35
2,10
1,62
1,34
1,05
0,96
0,84
0,67
0,53
0,42
0,33
Przykład oceny skuteczności zerowania
Sprawdzono skuteczność zerowania obudowy silnika o mocy 6kW na
napięcie 3x220/380V napędzającego maszynę budowlaną. Bezpieczniki
z wkładką o działaniu zwłocznym 16A - dopuszczalna impedancja obwodu
zwarcia odczytana z tablicy wynosi Z
MAX
= 2,10
Ω.
Wynik pomiaru rezystancji miernikiem MOZ (0,46
±0,052) Ω
Kąt fazowy pętli
0,568
16
220
3
6000
I
U
3
P
cos
=
⋅
⋅
=
⋅
⋅
=
ϕ
Impedancja pętli zwarcia
0915
,
0
845
,
0
568
,
0
052
,
0
48
,
0
cos
R
Z
±
=
±
=
ϕ
=
Skuteczność zerowania jest zgodna z przepisami, bo :
(0,845
±0,0915) Ω < 2,10 Ω
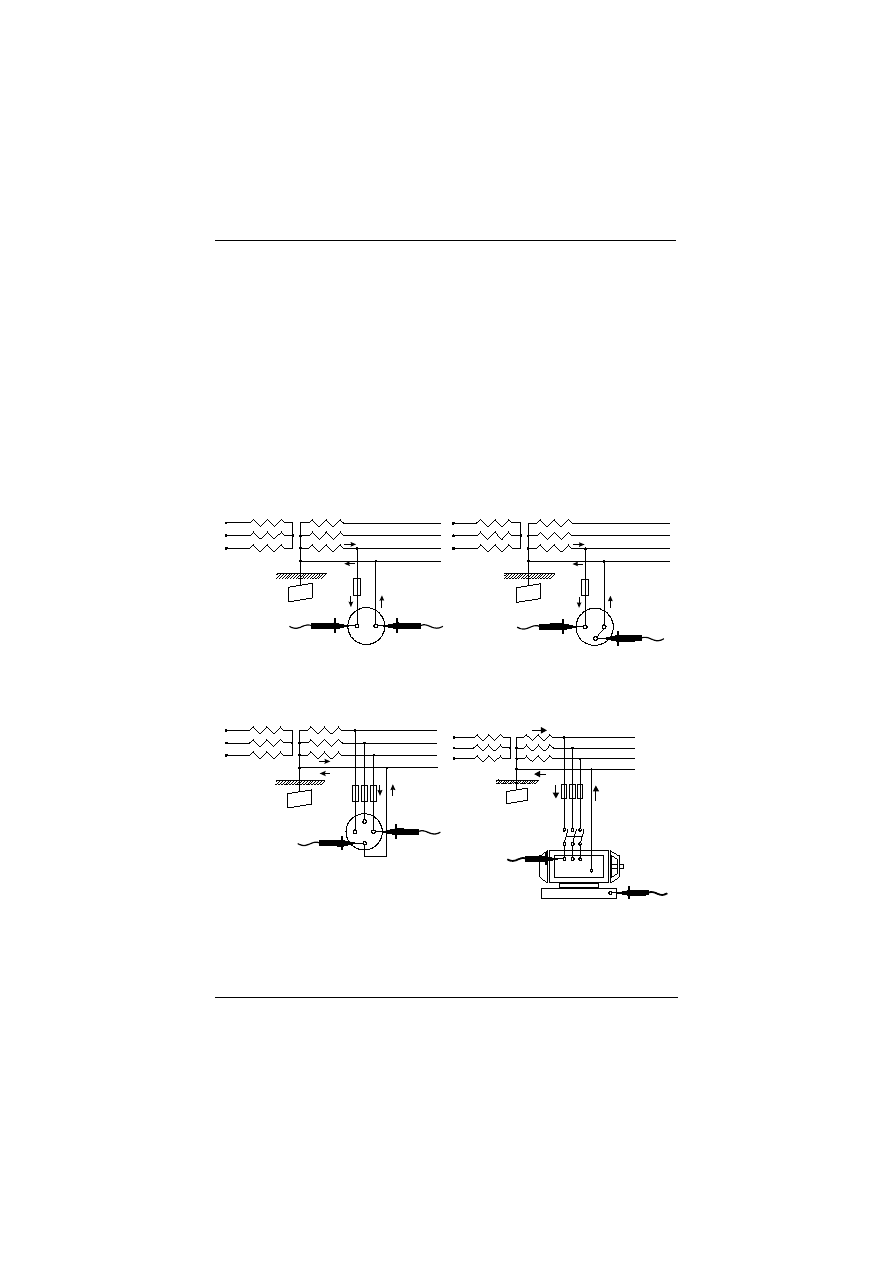
Laboratorium Aparatów Elektrycznych @KEMOR
101
1.3. POMIAR IMPEDANCJI ZWARCIOWEJ
Celem wykonania pomiaru należy wykonać kolejno następujące
czynności :
• Przyłączyć do zacisków miernika przewody wchodzące w skład wypo-
sażenia (w przypadku stosowania innych przewodów ich łączna rezy-
stancja powinna wynosić (70
± 14) mΩ - a izolacja wytrzymywać na-
pięcie probiercze 4kV. (Uważać na możliwość uszkodzenia izolacji przy
zginaniu w niskich temperaturach).
• Wkręcić do izolowanej rękojeści końcówki umożliwiające wygodny do-
stęp do zakończeń przewodu fazowego i zerowego (lub uziemiającego).
• Przyłączyć przewody łączeniowe miernika do zakończeń przewodu fa-
zowego i zerowego (uziemiającego) w miejscu pomiaru (rysunek 4
÷
9).
Rys.4. Pomiar rezystancji zwarciowej
w gnieździe sieciowym bez koł-
ka ochronnego.
Rys.5. Pomiar rezystancji zwarciowej
w gnieździe sieciowym z koł-
kiem ochronnym.
Rys.6. Pomiar rezystancji zwarciowej
w gnieździe sieciowym 3 – bie-
gunowym a zestykiem ochron-
nym.
Rys.7. Pomiar rezystancji zwarciowej
między częścią wiodącą prądu
a obudową urządzenia elek-
trycznego.
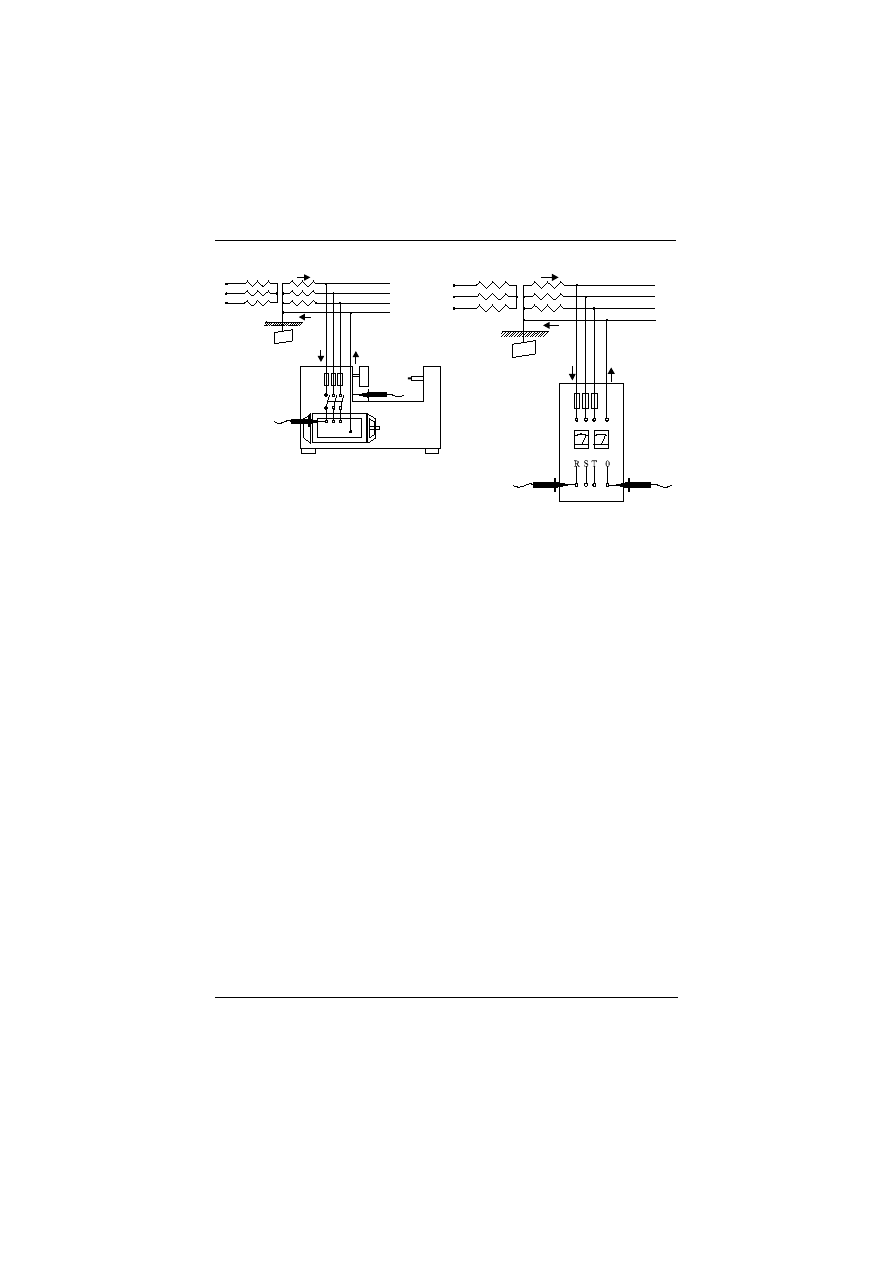
Laboratorium Aparatów Elektrycznych @KEMOR
102
Rys.8. Pomiar rezystancji zwarciowej
obrabiarki.
Rys.9. Pomiar rezystancji zwarciowej
na tablicy rozdzielczej.
Miejsca styku końcówek miernika z zakończeniami przewodów po-
winny być oczyszczone a końcówki dociśnięte.
Sprawdzić stan lampki kontrolnej umieszczonej pod tarczą podział-
kową. Nie świecenie lampki oznacza zanik napięcia lub przerwę w przewo-
dzie zerowym (uziemiającym). W przypadku przerwy w przewodzie zero-
wym (uziemiającym) nie wolno uruchamiać miernika (przyciskać przyci-
sku); w takim przypadku należy przerwać czynności pomiarowe. Jeśli
lampka kontrolna świeci się, należy po upływie nie mniej niż 3s od mo-
mentu przyłączenia końcówek do przewodów nacisnąć przycisk na mierni-
ku i nie zwalniając nacisku po uspokojeniu się wahań wskazówki nie póź-
niej jednak niż po 5 sek. od naciśnięcia przycisku odczytać na podziałce
wynik pomiaru rezystancji pętli zwarcia.
Miernik w momencie odczytywania powinien być ustawiony pozio-
mo.
Powtórny pomiar może być dokonany po zwolnieniu przycisku i po
upływie nie mniej niż 3s; w ciągu 1 minuty nie należy wykonywać więcej
niż 6 pomiarów. Niezwłocznie po dokonaniu pomiaru odłączyć miernik od
sieci energetycznej.
Dla każdego obiektu pomiar wykonujemy trzykrotnie:
1. w pobliżu transformatora
2. w połowie odległości
3. w pobliżu miejsca pomiaru
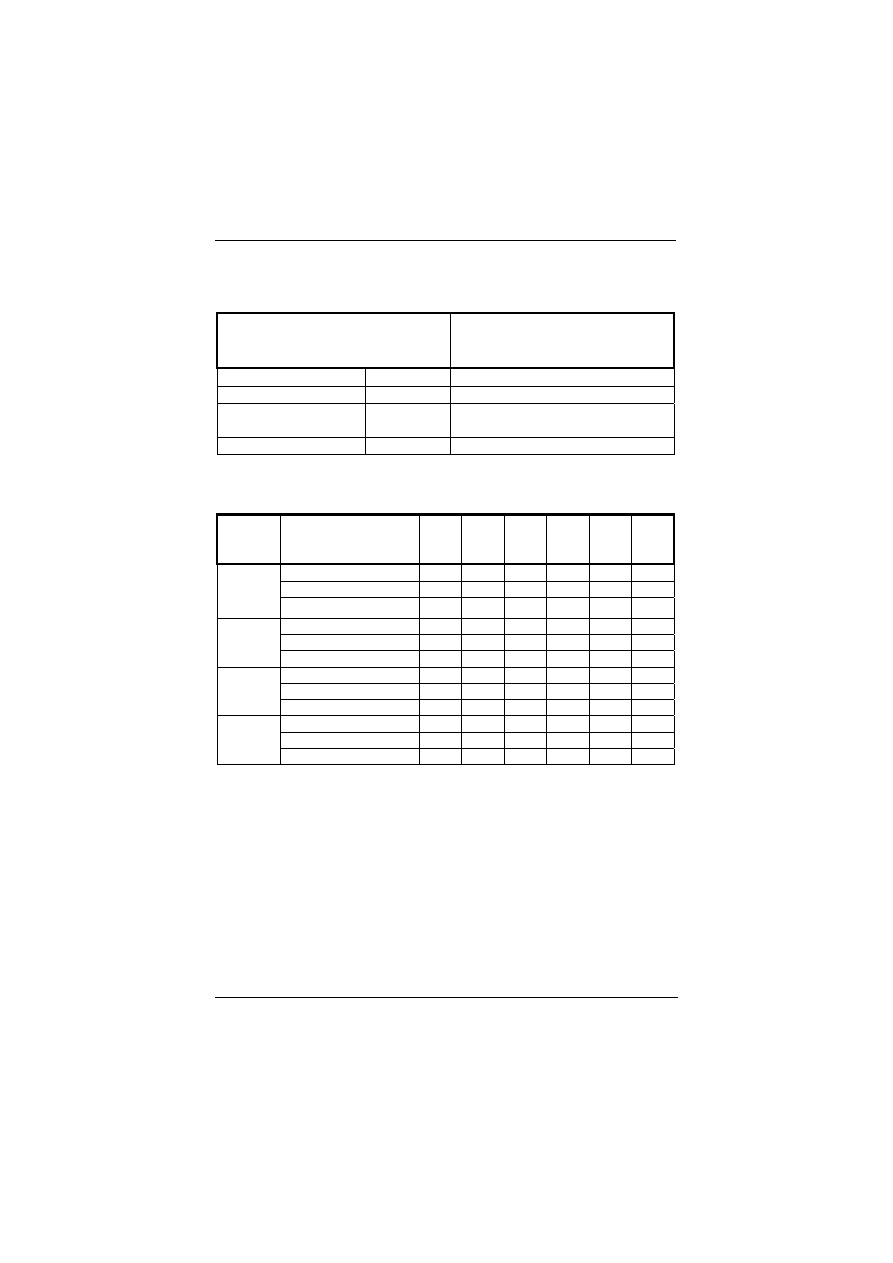
Laboratorium Aparatów Elektrycznych @KEMOR
103
Tabela 5. Wartości bezpieczników zabezpieczenia laboratorium
Bezpieczniki z wkładką o działaniu
szybkim
Dopuszczalna max. impedancja pętli
zwarcia
Oświetlenie
10 A
8,80
Ω
Gniazda jednofazowe
16 A
5,50
Ω
Gniazda siłowe
16 A
20 A
5,50
Ω
4,40
Ω
Zasilanie
20 A
4,40
Ω
Tabela pomiarowa
Obiekt
pomiaru
Odległość pomiaru
W
[
Ω]
W
k
[
Ω]
cos
[
°]
Z
[
Ω]
Z
MAX
[
Ω]
z/n
W pobliżu transform
W połowie odległości
Silnik
W pobliżu miejsc pom
W pobliżu transform
W połowie odległości
Gniazdo
jednofa-
zowe
W pobliżu miejsc pom
W pobliżu transform
W połowie odległości
Gniazdo
siłowe
W pobliżu miejsc pom
W pobliżu transform
W połowie odległości
Oświe-
tlenie
W pobliżu miejsc pom
W
– wskazanie rezystancja pętli zwarcia
W
k
– skorygowana rezystancja pętli zwarcia (+/- uchyb łączny równy
0,052
Ω)
cos –
kąt fazowy pętli
Z –
impedancja
pętli zwarcia
Z
MAX
– dopuszczalna impedancja obwodu zwarcia
z/n
– (z - zgodna, n – niezgodna)
Laboratorium Aparatów Elektrycznych @KEMOR
104
2. PROGRAM
ĆWICZENIA
Celem ćwiczenia jest zapoznanie się z zerowaniem ochronnym jako
środkiem dodatkowej ochrony przeciwporażeniowej oraz poznanie metod
pomiaru impedancji pętli zwarcia.
Opracowanie ćwiczenia należy dokonać na trzech odrębnych arku-
szach:
1. Protokół oceny skuteczności zerowania.
2. Schemat laboratorium aparatów elektrycznych z zamieszczonymi
punktami pomiarowymi.
3. Wyniki pomiarów i obliczenia, na podstawie których wydano opinię
skuteczności zerowania oraz nasuwające się uwagi i wnioski.
Opracowane punkty 1 i 2 są właściwe dla opracowania ćwiczenia,
natomiast punkt 3 należy wykonać tylko dla wiadomości prowadzącego la-
boratorium.
Protokół i przykładowy schemat obiektu z zamieszczonymi punkta-
mi pomiarowymi zamieszczono dalej. Należy pamiętać o tym, iż numer
liczby porządkowej w protokóle ma odpowiadać numerowi punku pomia-
rowego na schemacie obiektu, gdzie były dokonywane pomiary.
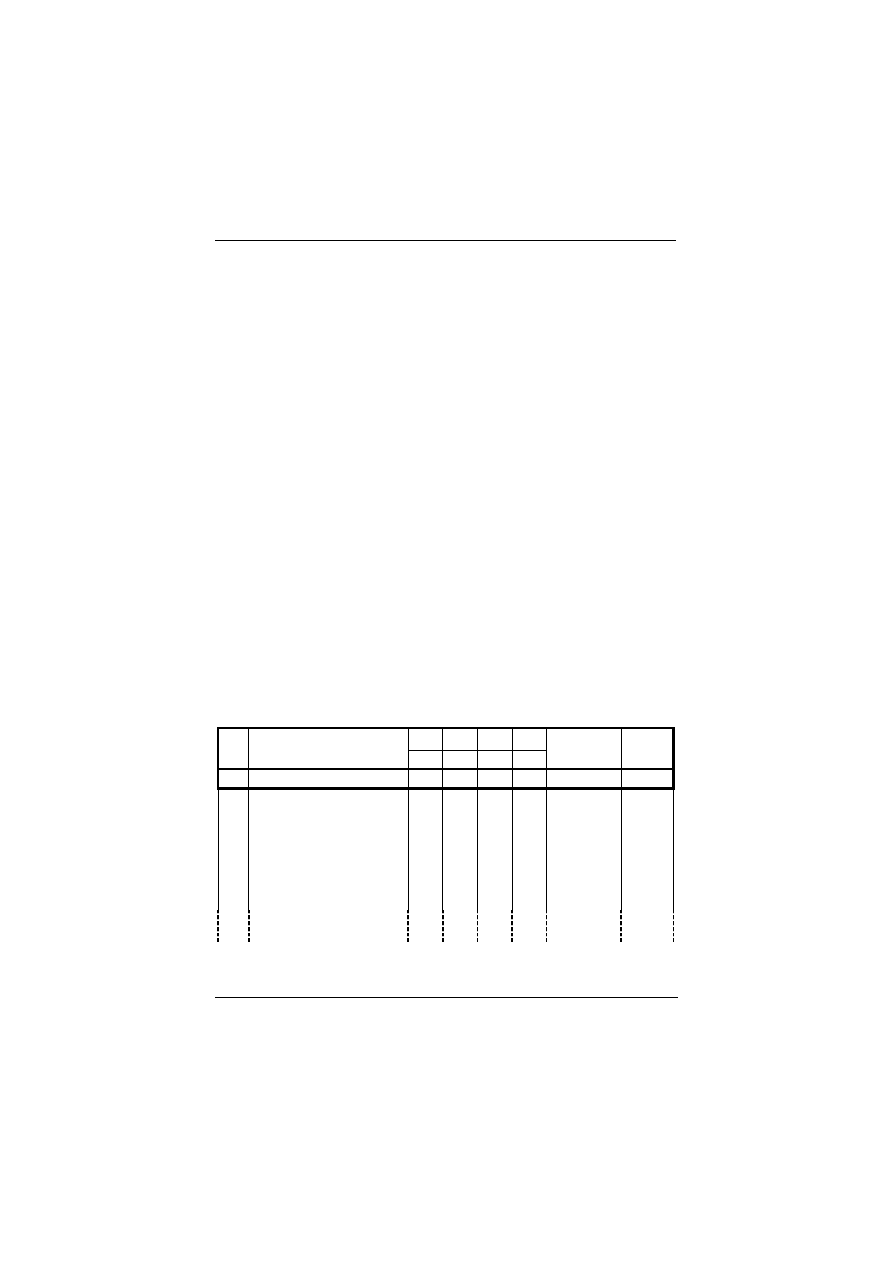
Laboratorium Aparatów Elektrycznych @KEMOR
105
...............................dnia..................................
PROTOKÓŁ nr .....................
z pomiarów skuteczności ochrony od porażeń elektrycznych
Zleceniodawca: ..................
/Nazwisko osoby zlecającej pracę/
...............................
Obiekt: ..............................
./Adres obiektu pomiarowego/
......................................
System ochrony od porażeń: .......ZEROWANIE...........................................
Przyrząd pomiarowy – mostek:.................................... nr ...........................
Pomiary wykonali:
.........................................
.........................................
.........................................
.........................................
.........................................
.........................................
I
B
k
I
W
I
Z
Lp Badane urządzenie
[A] [-]
[A] [A]
Opinia
Uwagi
1
2
3
4
5
6
7
8
1.
Gniazdo wtykowe 1faz. 10
2,5 25
176 skuteczna
2.
Gniazdo wtykowe 1faz. 10
2,5 25
176 skuteczna
3.
Komputer
10
2,5 25
117 skuteczna
4.
Gniazdo wtykowe 3faz. 16
2,5 40
168 skuteczna
5.
Sprężarka
16
2,5 40
126 skuteczna
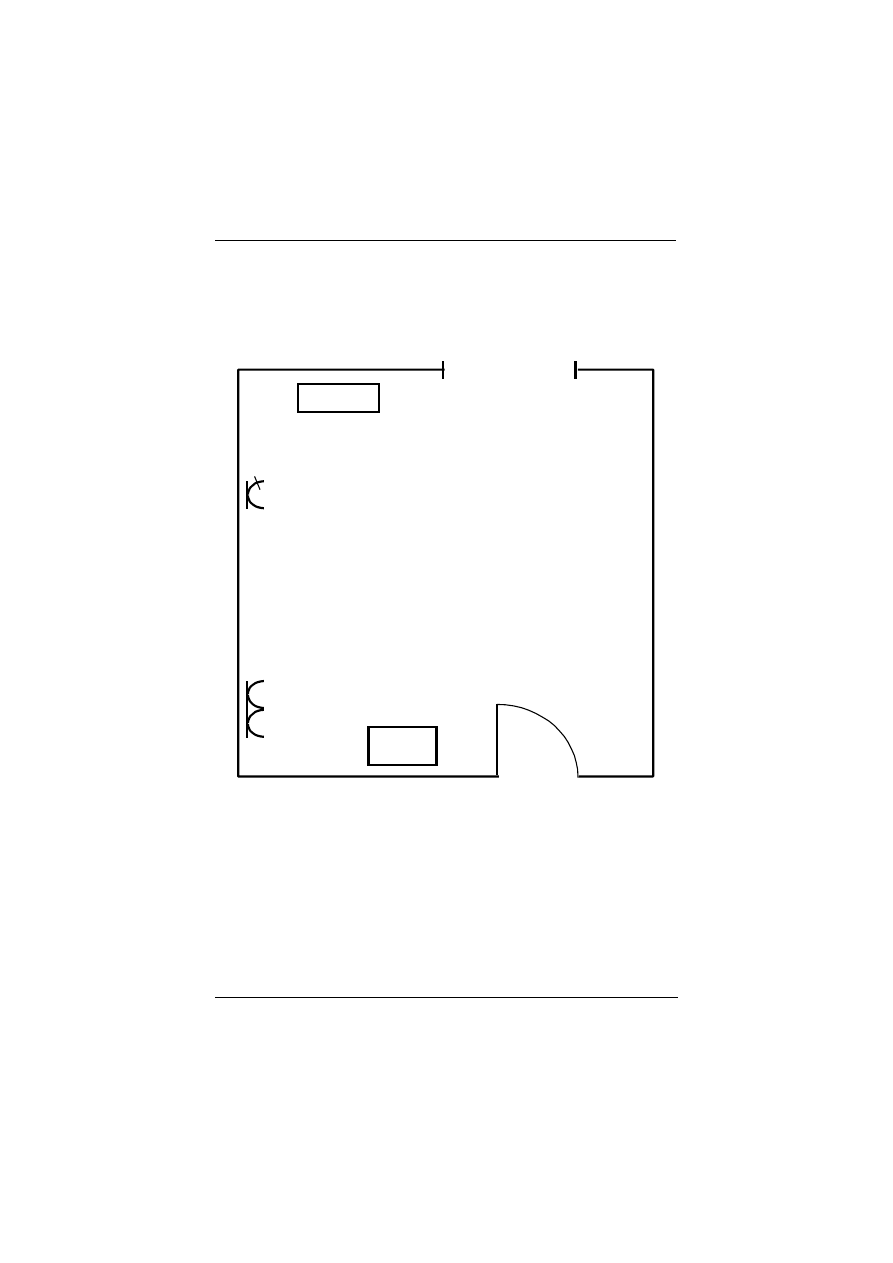
Laboratorium Aparatów Elektrycznych @KEMOR
106
Schemat obiektu
3
4
2
1
5
3
Wyszukiwarka
Podobne podstrony:
U 8 Zestyki w aparatach elektrycznych
Jednomodowe czujniki interferencyjne, Studia, sprawozdania, sprawozdania od cewki 2, Dok 2, Dok 2, P
Badanie wyłącznika - APU-15, Studia, sprawozdania, sprawozdania od cewki 2, Dok 2, Dok 2, POLITECHN
elektrochemia-skrypt, 1907KOND
elektrochemia-skrypt, 1905PH
drążenie elektroerozyjne skrypt 2008
elektrochemia-skrypt, 02BHP
Maszyny Elektryczne Skrypt Polit Krakowska
Maszyny elektryczne skrypt
elektrochemia-skrypt, Tabelki- Laboratorium Elektrochemii, LABORATORIUM ELEKTROCHEMII
elektryczna, Skrypty, UR - materiały ze studiów, IV semestr, inżynieria
Aparatura elektroakustyczna, kształcenie specjalne, logopedia
urzadzenia el. spr 6 7, PWR, MATERIAŁY PWR, LABOLATORIA, URZĄDZENIA ELEKTRYCZNE
Światłowody jednomodowe, Studia, sprawozdania, sprawozdania od cewki 2, Dok 2, Dok 2, POLITECHNIKA L
Chemia labolatorium, Dysocjacja elektrolityczna edycja, Rat
elektrochemia-skrypt, cw-KOROZJA, KOROZJA
więcej podobnych podstron