Podstawy elektroniki i metrologii na kierunku Informatyka
POMIARY CZASU, CZĘSTOTLIWOŚCI I PRZESUNIĘCIA FAZOWEGO
Ćwiczenie nr 3
1. Cel ćwiczenia
Podstawowym celem ćwiczenia jest poznanie analogowych i cyfrowych metod pomiaru przedziałów czasu,
częstotliwości i kąta przesunięcia fazowego. Celem uzupełniającym jest utrwalenie umiejętności posługiwania się
oscyloskopem oraz zbadanie właściwości metrologicznych cyfrowego miernika czasu i częstotliwości.
2. Wprowadzenie
2.1. Analogowe metody pomiarowe
Analogowe metody pomiaru, częstotliwości i kąta przesunięcia fazowego są realizowane za pomocą
oscyloskopu.
2.1.1. Metody graficzne
Najprostsza metoda pomiaru częstotliwości polega na graficznym zobrazowaniu na ekranie oscyloskopu
fragmentu przebiegu badanego, zmierzeniu jego okresu i obliczeniu częstotliwości jako odwrotności okresu ze
wzoru:
,
1
tx
T
x
D
x
f
=
(1)
gdzie:
x
T
− odstęp między odpowiednimi przejściami przez zero,
D
tx
− współczynnik podstawy czasu.
Jest to metoda w której wielkość poszukiwana, częstotliwość f
x
nie jest mierzona bezpośrednio, lecz
wyznaczana na podstawie pomiaru innej wielkości x
T
określającej okres przebiegu badanego. Jest to przykład
pomiaru pośredniego, który wymaga przy ocenie dokładności pomiaru uwzględnienia funkcji (1). Sposób
postępowania przy wyznaczeniu błędu systematycznego zostanie przedstawiony dla ogólnego przypadku.
W wielu sytuacjach wielkość poszukiwana y nie jest mierzona bezpośrednio, lecz wyznaczana na podstawie
pomiarów innych wielkości x
i
związanych z nią określoną zależnością funkcyjną:
(
)
n
x
x
x
f
y
,...,
,
2
1
=
(2)
nazywaną równaniem pomiaru.
Aby wyznaczyć zmianę ∆y funkcji (2) (tzn. błąd bezwzględny ε
y
wielkości poszukiwanej y) spowodowany
zmianami jej argumentów o ∆x
1
, ∆x
2
, ... ∆x
n
(określających błędy bezwzględne
,
, ...
mierzonych
wielkości) należy wykorzystać następującą zależność:
1
x
ε
2
x
ε
n
x
ε
n
n
x
x
f
x
x
f
x
x
f
y
∆
∂
∂
+
+
∆
∂
∂
+
∆
∂
∂
=
∆
...
2
2
1
1
(3)
która odwzorowuje równanie pomiaru w dziedzinie błędów.
Pochodne cząstkowe:
i
x
f
∂
∂
, gdzie: i = 1, 2, ... n
(4)
nazywane są współczynnikami wrażliwości, zaś całe wyrażenie nazywa się różniczką zupełną.
W przypadku metody graficznej pomiaru f
x
opisanej równaniem (1), błąd bezwzględny metody na podstawie
zależności (3), przyjmuje postać:
tx
x
D
tx
x
T
T
x
f
D
f
x
f
ε
ε
ε
∂
∂
+
∂
∂
=
(5)
Najczęściej wyznaczany jest błąd maksymalny, dlatego w zależności (5) sumowane są wartości bezwzględne
poszczególnych składników. Natomiast błąd względny
obliczamy z zależności:
x
f
δ
%
100
x
f
f
f
x
x
ε
δ
=
(6)
1
1.a)
gdzie wartość f
x
wyznaczamy z (1) dla zmierzonych wielkości x
T
i D
tx
.
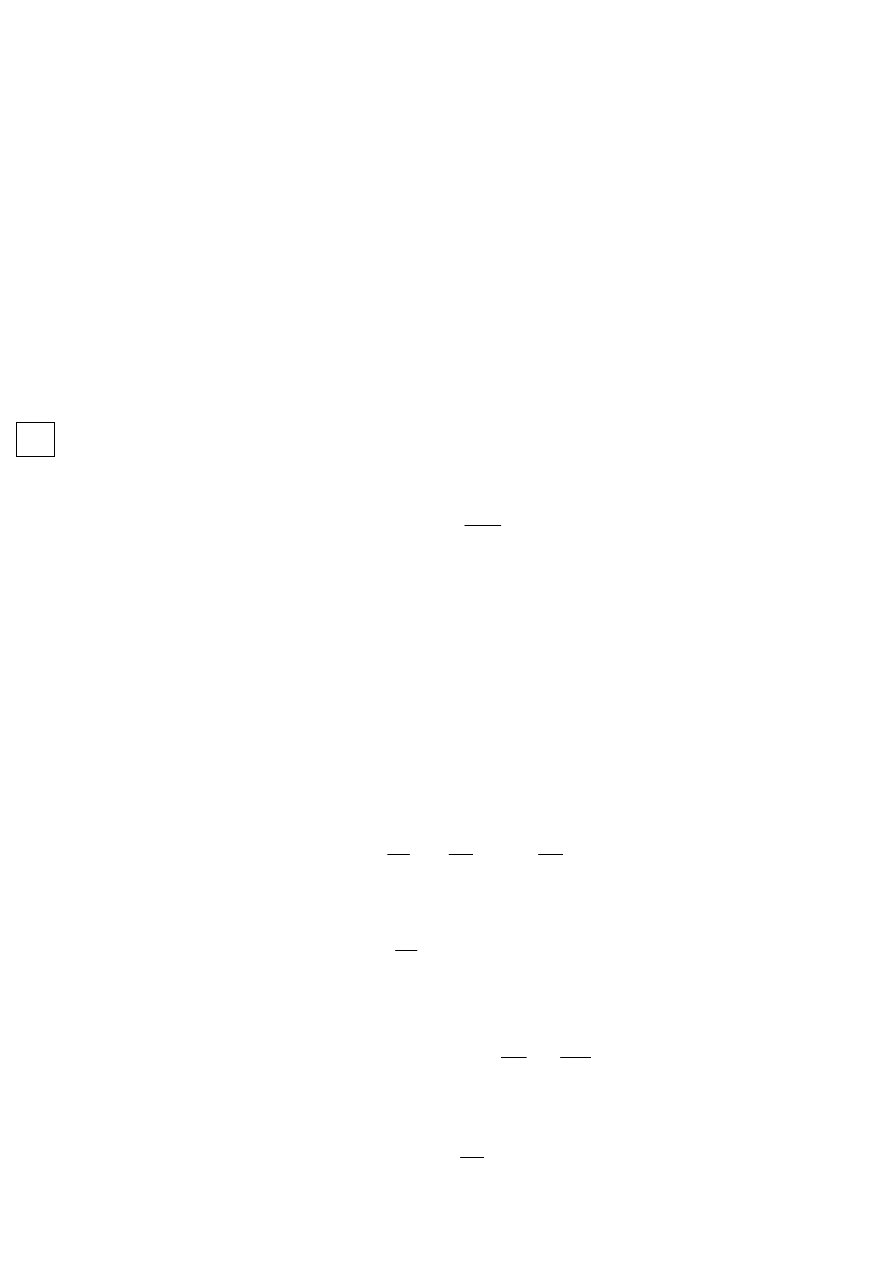
W podobny sposób można pomierzyć kąt przesunięcia fazowego pomiędzy dwoma przebiegami okresowymi o
tej samej częstotliwości. W tym przypadku potrzebny jest oscyloskop dwukanałowy. Podając przebiegi badane na
wejścia obu kanałów oscyloskopu, na jego ekranie otrzymuje się obraz pokazany na rys. 1a.
x
τ
x
T
t
U
y
a)
b)
2x
m
2x
0
X
Y
Rys. 1. Obrazy na ekranie oscyloskopu wykorzystywane do graficznego pomiaru kąta
przesunięcia fazowego: a) metodą bezpośrednią, b) metodą figur Lissajous
Mierząc długość okresu x
T
oraz długość odcinka między przejściami przez zero w tych samych fazach obu
przebiegów x
τ
, wartość przesunięcia fazowego oblicza się ze wzoru:
°
=
360
T
x
x
τ
ϕ
(7)
Alternatywną metodą pomiaru przesunięcia fazowego oscyloskopem jednokanałowym jest metoda figur
Lissajous. Podając przebiegi badane odpowiednio na kanał X i kanał Y oscyloskopu, otrzymuje się na ekranie obraz
elipsy, pokazany na rys. 1b.
Z kształtu elipsy można obliczyć kąt przesunięcia fazowego, posługując się wzorem:
±
=
m
x
x
2
2
arcsin
0
ϕ
(8)
Błąd bezwzględny pomiaru kąta przesunięcia fazowego metodą figur Lissajous (wyrażony w radianach),
wyznaczony za pomocą różniczki zupełnej, wynosi:
(
)
[
rad
2
2
1
2
2
2
2
1
2
1
2
0
2
0
2
0
max
⋅
−
+
⋅
−
±
=
m
o
x
m
m
x
m
m
x
x
x
x
x
x
x
ε
ε
ε
ϕ
]
(9)
gdzie:
,
o
x
ε
m
x
ε
− błąd odczytu odcinków x
o
i x
m
(przyjąć
=
= 1 mm).
o
x
ε
m
x
ε
Dokładność graficznych metod pomiaru częstotliwości i fazy nie jest duża i często są one wykorzystywane do
wstępnych pomiarów o charakterze szacunkowym. Bardzo dużą dokładność pomiaru częstotliwości zapewniają
metody porównania z wzorcem, których błąd zależy głównie od dokładności generatora wzorcowego. Oscyloskop
w takich metodach pełni rolę wskaźnika porównania.
2.1.2. Metody porównawcze
Najłatwiejszą w realizacji, a tym samym najczęściej stosowaną, jest metoda figur Lissajous.
Do wejść Y i X oscyloskopu pracującego w trybie XY (z wyłączoną podstawą czasu) dołącza się odpowiednio
przebieg badany i przebieg z generatora wzorcowego. Jeżeli stosunek obu częstotliwości jest równy liczbie
całkowitej lub stosunkowi dwu liczb całkowitych, to na ekranie otrzymuje się nieruchomy obraz figury Lissajous.
Drobna różnica częstotliwości powoduje obrót obrazu z szybkością proporcjonalną do odchyłki aktualnych
częstotliwości od częstotliwości, dla których spełniony jest powyższy warunek.
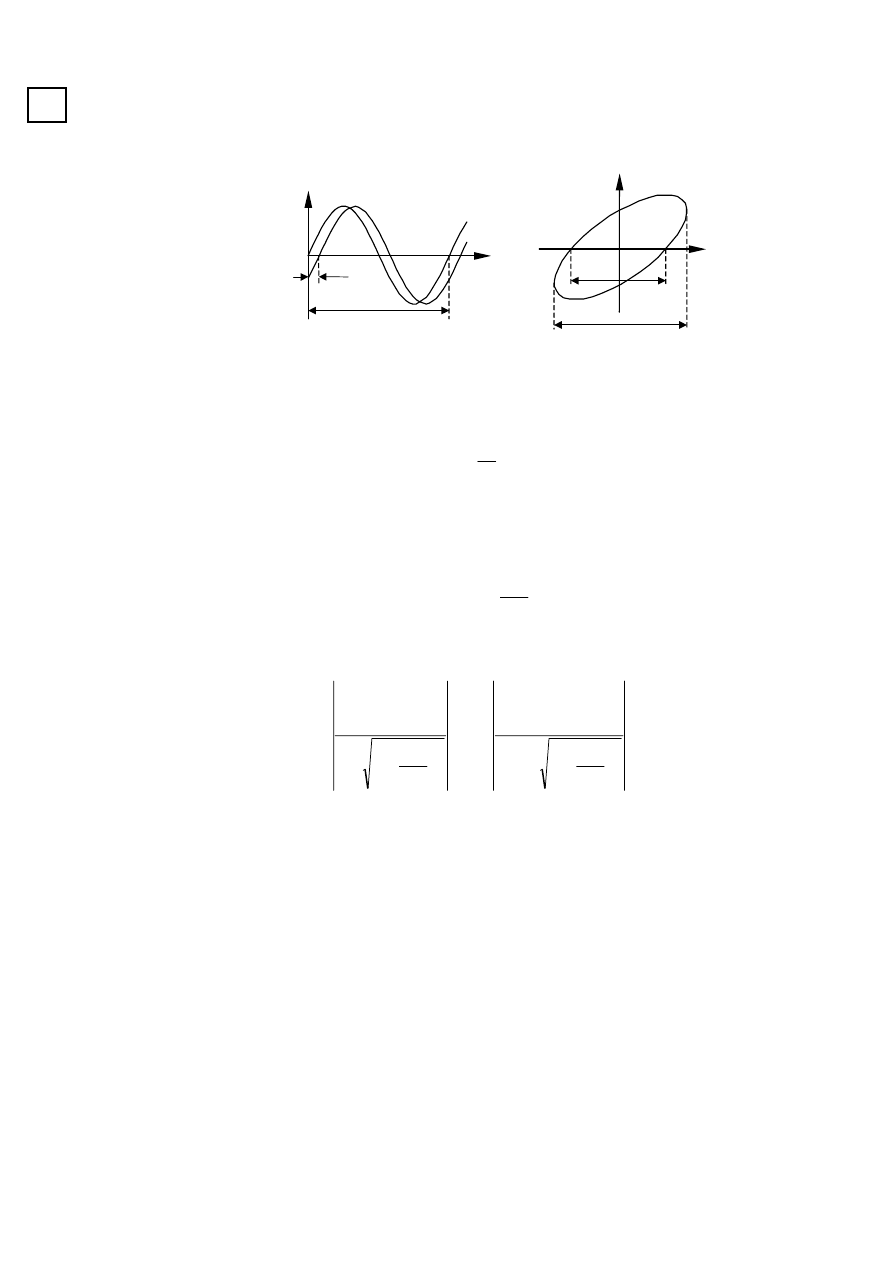
Na rysunku 2 pokazane są przykłady figur Lissajous. Stosunek obu częstotliwości oblicza się metodą
siecznych lub stycznych. W metodzie siecznych stosunek ten wyznacza się dzieląc liczbę przecięć prostej poziomej
(siecznej poziomej) z obrazem figury do liczby takich przecięć prostej (siecznej) pionowej. Obie proste powinny
być tak poprowadzone, aby nie przechodziły przez punkty węzłowe figury (rys. 2a).
W metodzie stycznych stosunek częstotliwości oblicza się dzieląc liczbę punktów styczności z figurą Lissajous
odpowiednio prostej poziomej i prostej pionowej, poprowadzonych stycznie do figury.
2
2)
Podstawy elektroniki i metrologii na kierunku Informatyka
a)
N
X
=8
N
Y
=2
f
f
4
1
y
x
=
b)
c)
Rys. 2. Przykłady figur Lissajous: a) sposób obliczania stosunku częstotliwości metodą siecznych, b) f
y
/f
x
= 2 : 5, c) jak na
rysunku b, lecz inna wartość faz początkowych obu sygnałów
Do obliczania stosunku częstotliwości służy wzór :
,
y
x
y
x
x
y
m
m
n
n
f
f
=
=
(10)
gdzie:
n
x
− liczba przecięć figury Lissajous z prostą poziomą,
n
y
− liczba przecięć z prostą pionową,
m
x
− liczba punktów styczności z prostą poziomą,
m
y
− liczba punktów styczności z prostą pionową.
Obraz figury Lissajous zależy nie tylko od stosunku częstotliwości przebiegów mierzonego i wzorcowego, lecz
również od różnicy faz początkowych między obu przebiegami. Ilustruje to przykładowo rys. 2b i c, na którym
pokazano figury Lissajous dla stosunków częstotliwości
f
y
/f
x
= 2 : 5 dla dwóch różnych wartości faz początkowych.
Przy dużych stosunkach porównywanych częstotliwości trudno jest uzyskać na ekranie obraz nieruchomy.
Niewielka zmiana częstotliwości jednego ze źródeł powoduje, że obraz na ekranie zmienia kształt i jednocześnie się
obraca, co jest wadą tej metody.
2.2. Cyfrowe metody pomiarowe
Istotę cyfrowych metod pomiarowych najłatwiej jest interpretować i analizować na przykładzie cyfrowego
pomiaru odstępów czasu.
2.2.1. Pomiary odstępów czasu
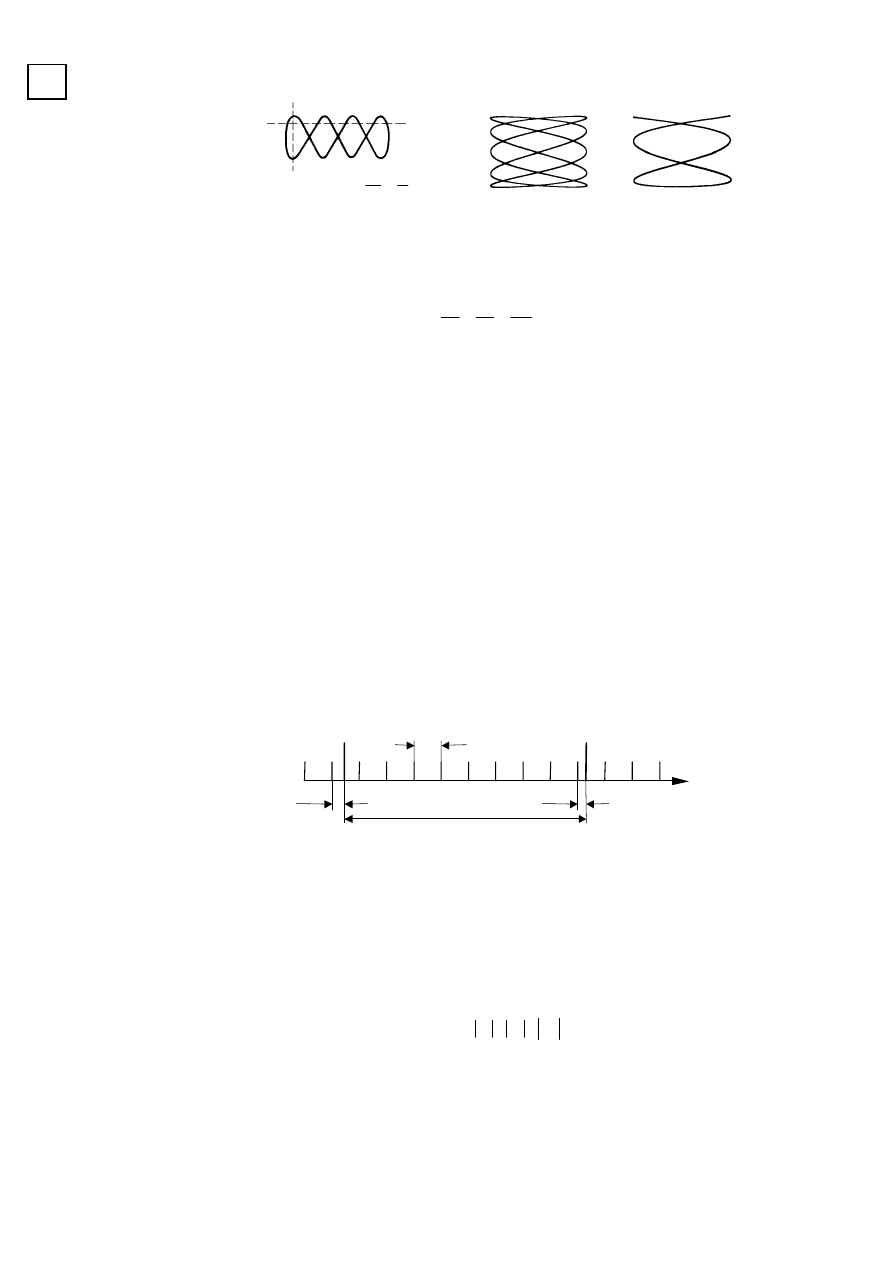
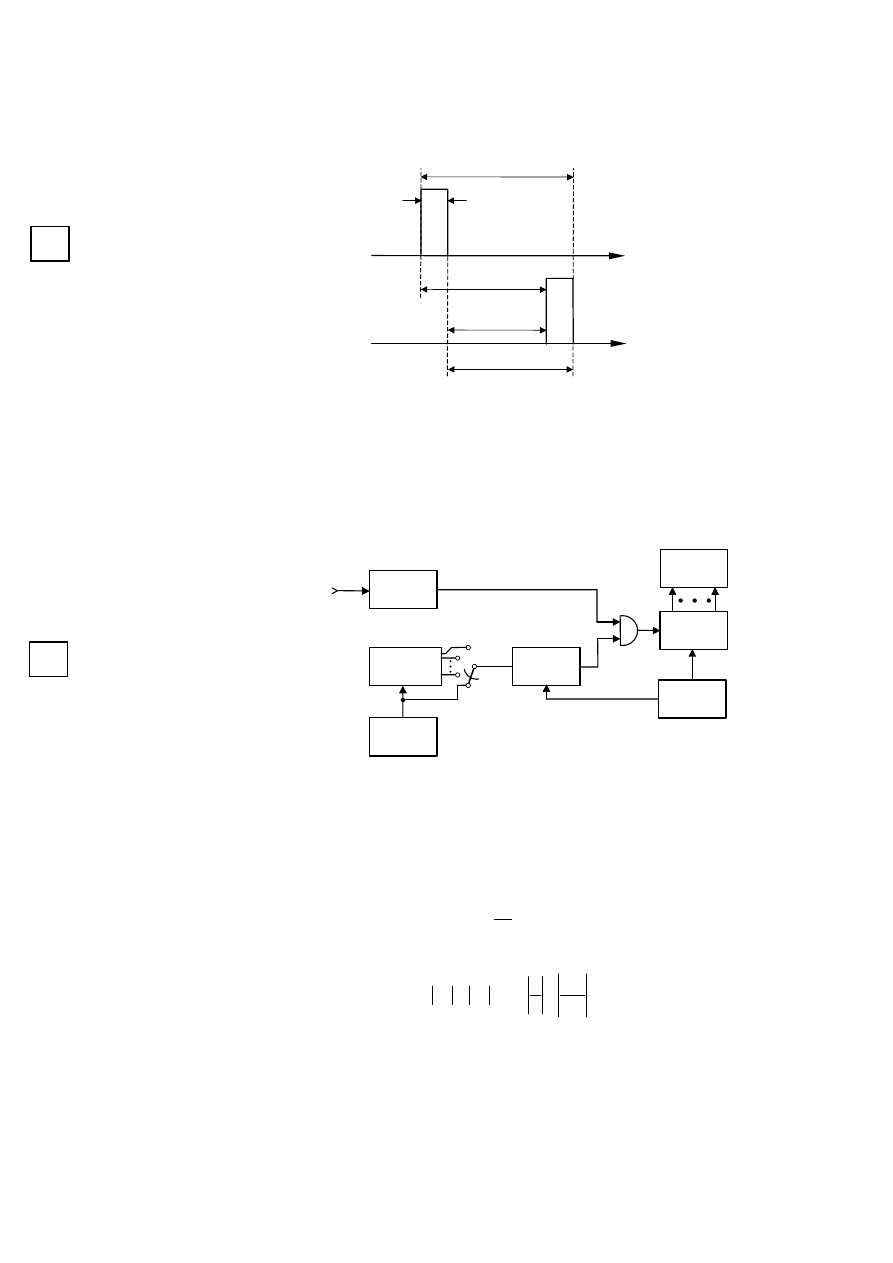
Jeżeli początkowi mierzonego przedziału czasu przyporządkuje się impuls start, a końcowi przedziału impuls
stop, to zasadę pomiaru można zilustrować rys. 3.
start
stop
∆t
1
∆t
2
T
x
τ
0 1 2
n
t
Rys. 3. Zasada cyfrowego pomiaru przedziałów czasu
Impuls start, zaznaczający początek przedziału czasu T
x
, otwiera bramkę elektroniczną, przez którą impulsy z
generatora wzorcowego (nazywane często impulsami zegarowymi) są podawane na licznik. Impuls stop,
zaznaczający koniec przedziału, zamyka bramkę i przerywa proces zliczania impulsów zegarowych przez licznik.
Jeżeli liczbę zliczonych impulsów oznaczymy n, a okres impulsów zegarowych
τ, to wynik pomiaru można zapisać
.
τ
n
T
x
=
(11)
Zależność (11) jest przybliżona, obarczona między innymi błędem dyskretyzacji. Względny błąd pomiaru jest sumą
trzech składowych: błędu dyskretyzacji
δ
d
, błędu wzorca
δ
w
i błędu układu formowania
δ
uf
.
{
}
uf
w
d
T
x
δ
δ
δ
δ
+
+
±
=
. (12)
Najbardziej charakterystyczną i istotną dla metod cyfrowych składową jest błąd dyskretyzacji. Wartość
bezwzględna błędu dyskretyzacji jest sumą dwóch składowych
∆t
1
i
∆t
2
, zaznaczonych na rys. 3.
2
1
t
t
T
xd
∆
+
∆
=
∆
. (13)
Składowe
∆t
1
i
∆t
2
są zmiennymi losowymi i z pomiaru na pomiar zmieniają się zgodnie z rozkładem
równomiernym, jedna w przedziale [0,
τ], a druga w przedziale [−τ, 0].
3
3)
Suma 2 zmiennych losowych o rozkładach równomiernych, usytuowanych względem siebie tak jak pokazuje
rys. 4, daje rozkład trójkątny, nazywany rozkładem Simpsona. Zatem błąd
dyskretyzacji, który wyczerpująco jest opisywany rozkładem Simpsona,
można oszacować za pomocą jednej liczby:
odchylenia standardowego
,
6
τ
σ
=
d
(14)
lub błędu maksymalnego
(15)
.
max
τ
ε
±
=
d
W praktyce pomiarowej najczęściej operuje się maksymalnym
względnym błędem dyskretyzacji, którego wartość jest równa
n
n
d
1
±
=
±
=
τ
τ
δ
. (16)
Błąd dyskretyzacji można zmniejszać zachowując warunek n
→ N, gdzie
N jest maksymalną liczbą impulsów, które może zliczyć licznik, zależną
od liczby jego dekad. Wówczas
N
N
n
d
1
→
→
δ
. (17)
Wynika stąd wniosek, iż w pomiarach cyfrowych należy tak dobierać
warunki pomiaru, aby wypełnienie licznika było możliwie największe.
Przy małym wypełnieniu licznika błędy dyskretyzacji mogą być bardzo
duże, sięgając 100
% przy n = 1. Stąd też mierniki cyfrowe są zaopatrzone
w dzielniki impulsów zegarowych pozwalające zwiększać lub zmniejszać
ich okres
τ w zależności od długości mierzonego przedziału czasu. Jest to
główna przyczyna tego, iż mierniki cyfrowe są z reguły przyrządami
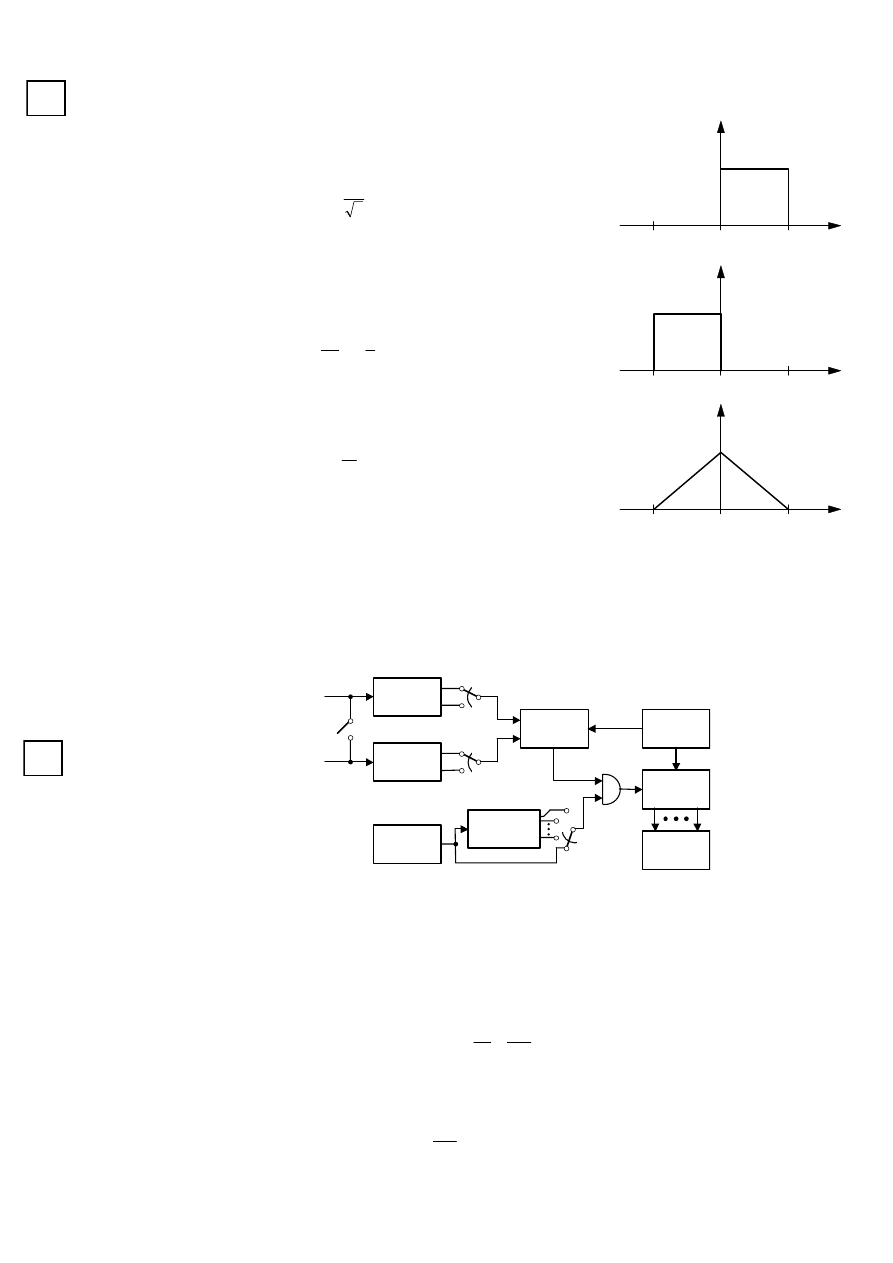
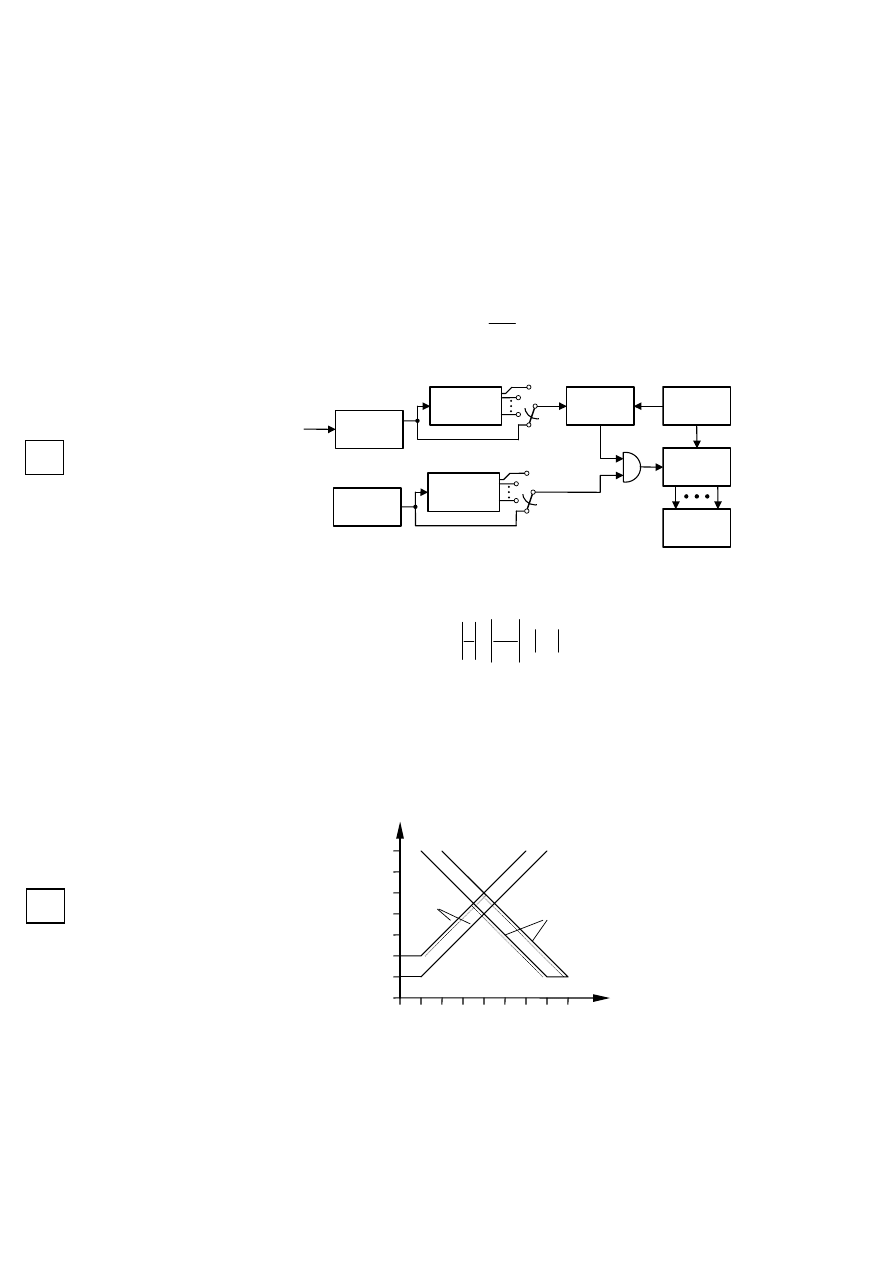
wielozakresowymi, przy czym zmiana zakresu może być dokonywana automatycznie. Schemat typowego
cyfrowego miernika czasu jest pokazany na rys. 5.
(
∆t
1
)
t
−
τ
τ
(
∆t
2
)
t
−
τ
τ
(
∆t
d
)
t
−
τ
τ
0
0
0
Rys.4. Rozkłady zmiennych losowych:
∆t
1
,
∆t
2
i
∆t
d
Układ
formujący
Układ
formujący
Układ
sterowania
bramką
Dzielnik
częstotliwości
Generator
wzorcowy
Układ
kasujący
Licznik
Układ
ekspozycji
+
−
+
−
P1
P2
we
t
xp
we
t
xk
P4
otw.
zam.
P3
Rys. 5. Schemat blokowy cyfrowego miernika czasu
Wielozakresowość miernika jest realizowana za pomocą przełączanego dzielnika częstotliwości. Wejściowe
układy formujące pozwalają przypisywać impulsy startowe i stopowe narastającemu lub opadającemu zboczu
impulsu wejściowego. Pozwala to mierzyć zarówno odstęp impulsów, jak też szerokość impulsu (P
4
.zwarty).
Wszystkie możliwe sytuacje pomiarowe, w zależności od ustawienia P
1
i P
2
, są pokazane na rys. 6.
Drugim składnikiem błędu cyfrowej metody pomiaru czasu jest błąd wzorca.
⋅
=
=
w
fw
w
f
ε
τ
ε
δ
τ
(18)
Jest on zdeterminowany stabilnością częstotliwości generatora wzorcowego. Współczesne generatory są
stabilizowane za pomocą rezonatorów kwarcowych, w których łatwo jest osiągnąć
,
10
10
9
7
−
−
÷
=
w
fw
f
ε
(19)
4
w zależności od rodzaju stabilizacji temperaturowej rezonatora.
9)
6.a)
Podstawy elektroniki i metrologii na kierunku Informatyka
Błąd układu formowania zależy od dokładności ustalenia momentu czasu przejścia przebiegów wejściowych
przez zero lub przez wybrany poziom napięcia, który można ustalić w układach formujących. Dla odstępów czasu
nie mniejszych od 1ms błąd ten jest pomijalny wobec pozostałych.
t
P
1
− P
2
+
P
1
− P
2
−
P
1
+ P
2
+
P
1
+ P
2
−
t
P
1
+ P
2
− (P
4
zwarty)
Rys. 6. Sytuacje pomiarowe w zależności od ustawienia P
1
i P
2
2.2.2. Cyfrowe pomiary częstotliwości
Są stosowane dwie metody cyfrowego pomiaru częstotliwości:
I. Metoda zliczania liczby okresów we wzorcowym odstępie czasu, stosowana do pomiaru częstotliwości dużych.
II. Metoda pomiaru okresu (jednego lub wielu) odpowiednia dla częstotliwości małych.
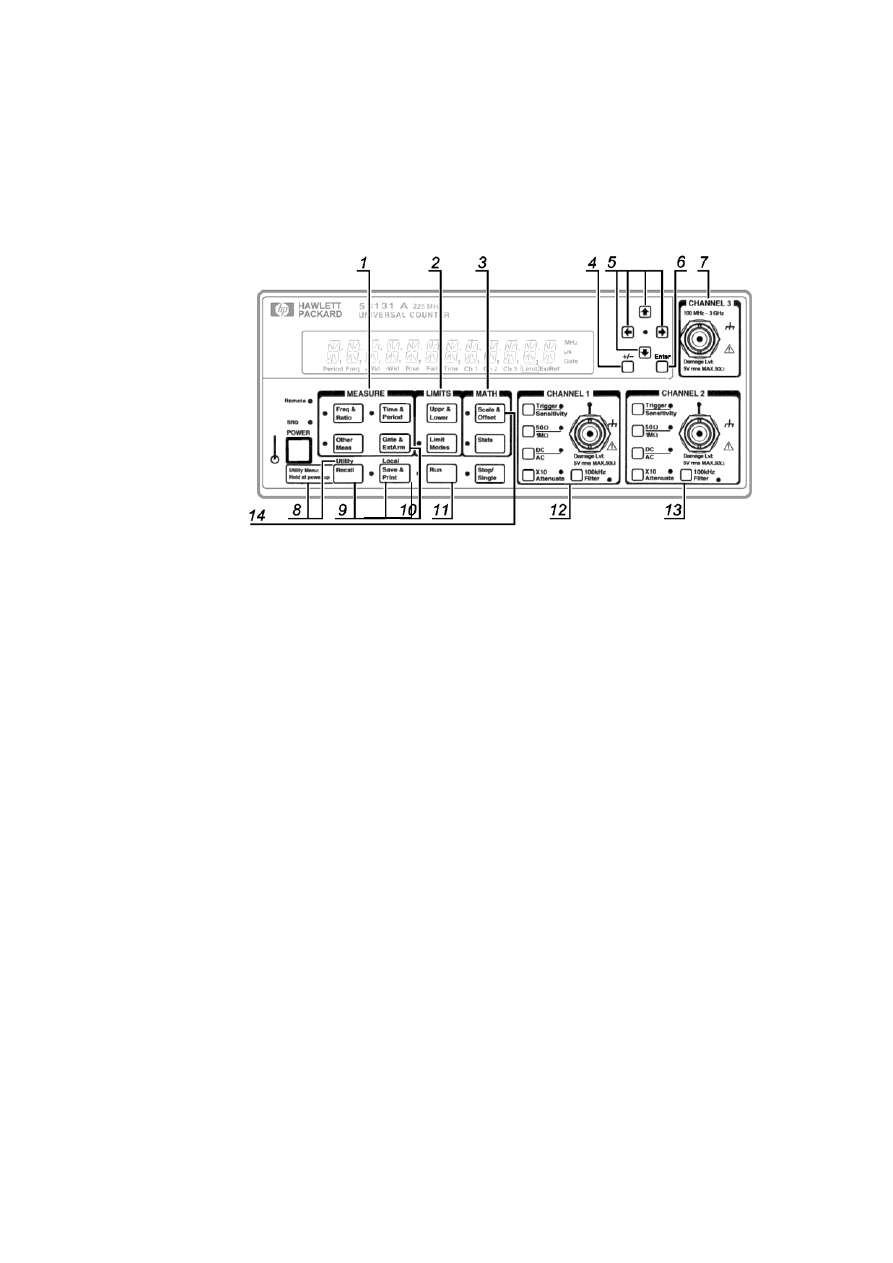
Schemat blokowy układu pomiarowego do pomiaru częstotliwości dużych jest pokazany na rys. 7.
Układ
formujący
Układ
sterowania
bramką
Dzielnik
częstotliwości
Generator
wzorcowy
Układ
kasujący
Licznik
Układ
ekspozycji
we
f
x
10
P
1
10
f
wz
T
w
Rys. 7. Schemat blokowy cyfrowego miernika częstotliwości
Pomiar częstotliwości odbywa się przez zliczanie okresów sygnału mierzonego T
x
we wzorcowym czasie T
w
,
zgodnie z zależnością
(20)
,
w
x
T
nT
=
z której otrzymuje się
.
w
x
T
n
f
=
(21)
Błąd pomiaru jest sumą błędu dyskretyzacji i błędu wzorca:
{
}
.
1
+
±
=
+
±
=
w
fw
w
d
f
f
n
x
ε
δ
δ
δ
(22)
Aby zminimalizować błąd dyskretyzacji, jak już wykazaliśmy, należy dążyć do spełnienia warunku
N
T
f
n
w
x
→
=
(23)
Spełnienie tego warunku, np. w przypadku licznika 7 dekadowego (
N = 10
7
− 1), wymaga następujących czasów
pomiaru:
5
6.b)
7/8)
przy
h.
8
.
2
s
10000
,
kHz
1
s,
1000
,
kHz
10
s,
10
,
MHz
1
≈
=
=
=
=
=
=
w
x
w
x
w
x
T
f
T
f
T
f
Jak widać, już przy
f
x
= 10 kHz czas pomiaru jest niedopuszczalnie duży. Zatem, dla małych częstotliwości, w
zakresie pasma akustycznego, należy stosować metodę pomiaru okresu przedstawioną na rys. 8, dla której
obowiązuje zależność:
,
w
x
nT
kT
=
(24)
gdzie
k jest liczbą mierzonych okresów.
Z równania (24) otrzymuje się następujący wzór opisujący zależność wskazań licznika i mierzonego okresu:
k
nT
T
w
x
=
. (25)
Układ
formujący
Układ
sterowania
bramką
Dzielnik
częstotliwości
Generator
wzorcowy
Układ
kasujący
Licznik
Układ
ekspozycji
we
T
x
Dzielnik
częstotliwości
10
P
1
10
10
P
1
10
f
wz
kT
x
τ
w
Rys. 8. Schemat blokowy cyfrowego miernika okresu
Błąd metody zawiera 3 składowe:
.
1
+
+
±
=
uf
w
fw
T
f
n
x
δ
ε
δ
(26)
Dwie pierwsze składowe to błąd dyskretyzacji i błąd wzorca (analogicznie jak w poprzedniej metodzie),
natomiast
δ
uf
jest błędem układu formowania, wynikającym z niedokładności określania momentów początku i
końca mierzonego okresu lub kilku okresów.
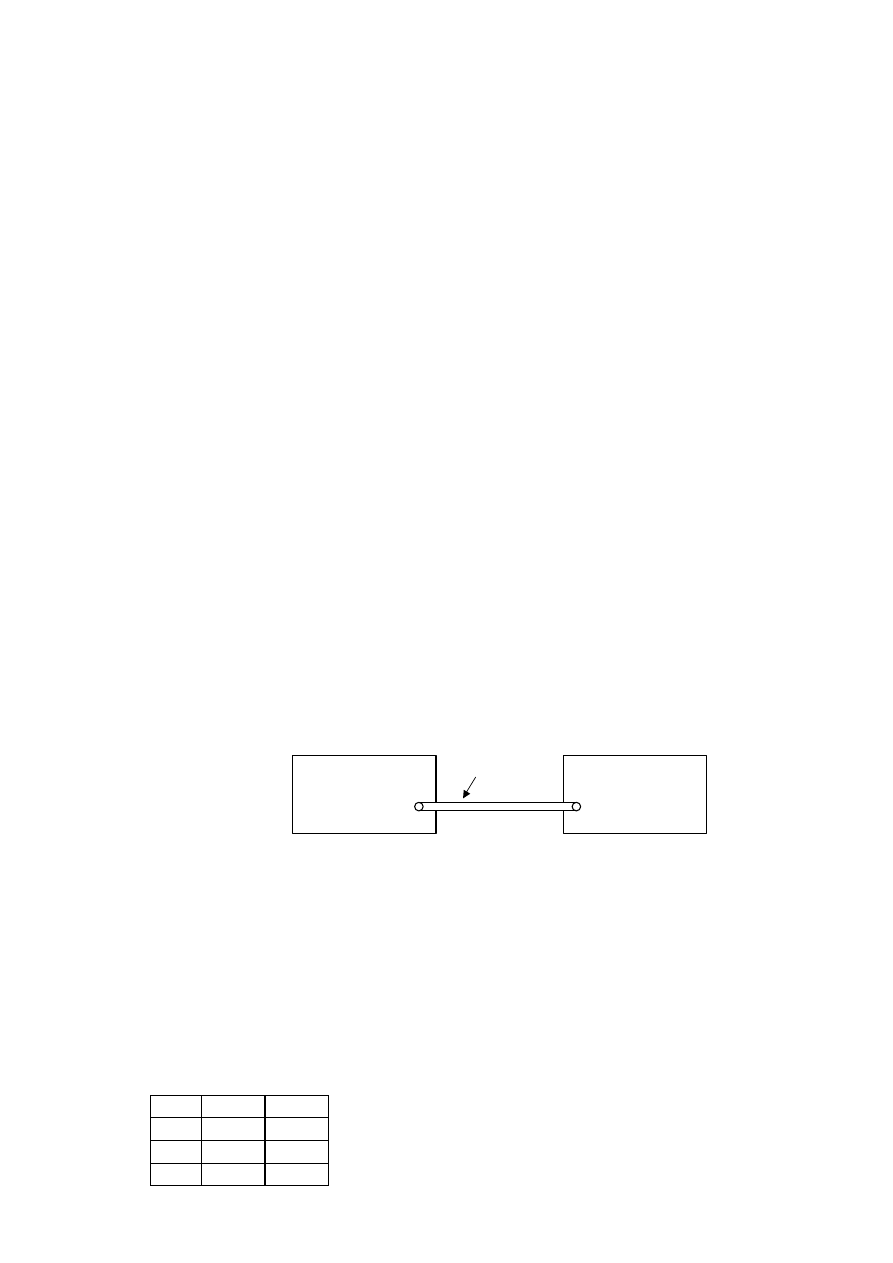
Dla ułatwienia racjonalnego doboru metody w cyfrowych pomiarach częstotliwości na rys. 9 przedstawiono
wykresy błędów w funkcji częstotliwości obu metod dla przypadku typowego miernika częstotliwości o
parametrach: f
w
= 10
7
Hz, liczba dekad 8 (
N
≈10
8
) błąd wzorca
ε
fw
/
f
w
= 10
−7
, przy
T
w
= 1 s i 0.1 s oraz
k = 1 i 10,
δ
uf
= 10
−6
.
10
-1
10
-2
10
-3
10
-4
10
-5
10
-6
10
-7
10
-8
1
10 10
2
10
3
10
4
10
5
10
6
10
7
10
8
f
x
II metoda
I metoda
k=1
k=10
T
w
=0.1s
T
w
=1s
δ
w
=10
-7
δ
b
=10
-6
δ
d
=f
x
/kf
w
δ
d
δ
Rys. 9. Krzywe ilustrujące dokładność obu cyfrowych metod pomiaru częstotliwości dla różnych zakresów częstotliwości
mierzonych
Jak widać z wykresu, dla
f
x
≥ 10 kHz zdecydowanie korzystniejsza jest metoda pomiaru częstotliwości dużych,
dla
f
x
≤ 1 kHz korzystniejsza jest metoda pomiaru okresu (dla częstotliwości małych). W zakresie 1÷10 kHz
występują największe błędy porównywalne dla obu metod.
6
7/8)
7/8)
Podstawy elektroniki i metrologii na kierunku Informatyka
Warto podkreślić, iż układ cyfrowego miernika częstotliwości składa się z tych samych bloków
funkcjonalnych co cyfrowy miernik czasu. W konfiguracji do pomiaru małych częstotliwości (przez pomiar
okresu), jest on niemal identyczny z miernikiem czasu.
Dlatego też większość współczesnych mierników cyfrowych umożliwia pomiar częstotliwości, czasu i
przesunięcia fazowego. Typowym przykładem mierników tego typu jest badany w ćwiczeniu
częstościomierz/czasomierz cyfrowy typ HP-53131A firmy Hewlett- Packard.
2.3. Obsługa przyrządu HP 53131A
1. Klawisze wyboru funkcji pomiaru
9. Klawisze odtworzenia, zapisu
2. Klawisze wyboru funkcji kontroli
konfiguracji, drukowania
3. Klawisze wyboru funkcji matematycznych 10. Konfiguracja sterowania bramką
4. Klawisz zmiany znaku (+/-)
11. Klawisze sterowania pomiarami
5. Klawisze wprowadzania danych
12. Klawisze ustawiania parametrów
6. Klawisz zatwierdzenia danych
układu wejściowego kanału 1
7. Kanał 3 (3 GHz)
− opcja, nie występuje
13. Klawisze ustawiania parametrów
8. Wybór dodatkowych narzędzi
układu wejściowego kanału 3
Rys. 10. Płyta czołowa przyrządu HP-53131A
Przyrząd HP-53131A firmy Hewlett-Packard służy do pomiaru czasu, okresu oraz częstotliwości sygnałów w
dwóch kanałach pomiarowych. Dzięki wbudowanemu mikroprocesorowi mierzone i obliczane są również
dodatkowe parametry związane z doprowadzonymi do przyrządu sygnałami. Sterowanie wyborem mierzonej
wielkości zostało ułatwione przez zastosowanie wyświetlacza alfanumerycznego oraz systemu menu związanego z
klawiszami funkcyjnymi. Rozwiązanie to charakteryzuje się stosunkowo niewielką liczbą klawiszy na płycie
czołowej (rys. 9.14), pogrupowanych funkcjonalnie.
2.3.1. Grupa wyboru wartości mierzonej
Pierwsza grupa wyboru mierzonej funkcji (pole MEASURE) liczy cztery klawisze:
• menu pomiarów częstotliwości i ich stosunku − klawisz Freq&Ratio
• menu pomiarów czasu i okresu
− klawisz Time&Period
• menu pozostałych pomiarów
− klawisz Other Meas
• menu sterowania czasem otwarcia bramki
− klawisz Gate&ExtArm
Wyboru jednej z funkcji pomiaru częstotliwości dokonuje się naciskając klawisz Freq&Ratio. Na
wyświetlaczu pojawiać się będą kolejno napisy określające funkcje:
• pomiar częstotliwości w kanale 1
FREQUENCY 1
• pomiar częstotliwości w kanale 2
FREQUENCY 2
• stosunek częstotliwości 1 do 2
RATIO 1 TO 2
• stosunek częstotliwości 2 do 1
RATIO 2 TO 1
Po wybraniu żądanej funkcji przyrząd automatycznie przystąpi do pomiarów. Następne dwie grupy menu są
obsługiwane na takich samych zasadach.
Druga grupa funkcji związanych z klawiszem Time&Period obejmuje:
• pomiar odcinka czasu 1 → 2
TI 1 TO 2
• pomiar okresu w kanale 1
PERIOD 1
• pomiar czasu narastania impulsu
RISETIME 1
• pomiar czasu opadania impulsu
FALLTIME 1
7

• pomiar czasu trwania impulsu
POS WIDTH 1
• pomiar czasu pomiędzy impulsami
NEG WIDTH 1
Pomiary te (oprócz pierwszej pozycji) są wykonywane dla sygnału doprowadzonego do kanału pierwszego
przyrządu.
Trzecia grupa funkcji
− wybór klawiszem Other Meas:
• pomiar ilości impulsów
TOTALIZE 1
• pomiar przesunięcia fazowego
PHASE 1 TO 2
• pomiar wypełnienia przebiegu w kanale 1
DUTYCYCLE 1
• pomiar napięcia szczytowego w kanale 1
VOLT PEAKS 1
• pomiar napięcia szczytowego w kanale 2
VOLT PEAKS 2
Czwarty klawisz grupy funkcji pomiarowych służy do wyboru trybu sterowania czasem otwarcia bramki.
Sposób postępowania różni się jednak od opisanego poprzednio. Po naciśnięciu klawisza pojawi się jeden z
napisów:
• ręcznie dobierany czas otwarcia bramki
GATE: TIME
• automatyczny dobór czasu otwarcia bramki
GATE: AUTO
• sterowanie bramki sygnałem zewnętrznym
GATE: EXTERNAL
• czas otwarcia proporcjonalny do ilości cyfr
GATE: DIGITS
Zmiany pomiędzy pozycjami menu dokonuje się przez naciskanie klawiszy kursorów umieszczonych z prawej
strony wyświetlacza. Po wybraniu automatycznie dobieranego czasu otwarcia bramki wystarczy nacisnąć klawisz
Run i przyrząd będzie wykonywał pomiary według tej nastawy. Natomiast dla pozostałych pozycji menu należy
nacisnąć ponownie klawisz Gate&ExtArm, by pojawiła się możliwość ustawienia parametrów wybranego trybu
pracy.
W ćwiczeniu wykorzystywany jest tryb ręcznego doboru czasu otwarcia bramki i tylko on będzie omówiony.
Po ponownym naciśnięciu klawisza Gate&ExtArm wyświetlany jest czas otwarcia bramki w postaci napisu TIME
i jego aktualnej wartości. Prezentowaną liczbę można edytować za pomocą klawiszy kursorów. Klawisze
← i →
służą do zmiany pozycji kursora, a klawisze
↑ i ↓ do zmiany wartości edytowanej cyfry. Po ustaleniu nowej
wartości czasu otwarcia bramki należy ją zatwierdzić naciskając klawisz Enter. Następnie pomiary uruchamia się
przez naciśnięcie klawisza Run.
2.3.2. Grupa funkcji kontroli wartości mierzonej
Przyrząd ma wbudowany mechanizm kontroli wartości mierzonej, polegający na wykrywaniu sytuacji
przekroczenia wartości mierzonej poza wyznaczone granice. W grupie tej znalazły się tylko dwa klawisze
umieszczone w polu LIMITS. Pierwszy z nich
− Uppr & Lower służy do wprowadzania wartości granic: górnej i
dolnej. Po naciśnięciu tego klawisza pojawia się napis UPPR: 0.000000. Korzystając z klawiszy
←, →, ↑ i ↓,
można ustawić górną granicę. Wprowadzoną wartość zatwierdza się klawiszem Enter. Po ponownym naciśnięciu
klawisza Upper&Lower pojawia się napis: LOWR: 0.000000 i można ustawić granicę dolną. Po wprowadzeniu
wartości granic należy nacisnąć klawisz Run.
Drugi klawisz umieszczony w polu Limits służy do ustawienia trybu pracy funkcji kontroli wartości. Po
naciśnięciu tego klawisza pojawia się jeden z napisów związanych z trybem pracy i aktualnym ustawieniem. Z
każdym trybem pracy są związane dwa stany ustawienia:
• włączenie / wyłączenie funkcji kontroli
LIM: TEST: OFF
LIM: TEST: ON
• zatrzymanie pomiarów po przekroczeniu wartości mierzonej jednej z granic
ON FAIL: GO ON
ON FAIL: STOP
• prezentacja wyników kontroli
SHOW: NUMBER
SHOW: GRAPH
Przełączanie pomiędzy stanami trybu pracy uzyskiwane jest przez naciskanie klawiszy oznaczonych
strzałkami. Po wybraniu trybu należy nacisnąć klawisz Run, by wznowić wykonywanie pomiarów. W trybie
zatrzymania pomiarów po przekroczeniu granicy przez wartość zmierzoną, by wznowić pomiary, również należy
nacisnąć klawisz Run.
2.3.3. Grupa funkcji matematycznych
Grupa funkcji matematycznych obejmuje operacje wykonywania czynności przeskalowania każdego wyniku
pomiaru oraz obliczenia statystyczne. Klawisze obsługujące funkcje matematyczne znajdują się na polu MATH.
Klawisz Scale&Offset obejmuje ustawienia wartości związanych ze skalowaniem wyniku. Automatyczne
obliczenia są wykonywane wg zależności:
wynik = (pomiar x mnożnik) + przesunięcie. Nominalnie po włączeniu
zasilania mnożnik jest równy jedności, a przesunięcie wynosi zero. Naciskając klawisz Scale&Offset uzyskuje się
pozycje menu:
8

Podstawy elektroniki i metrologii na kierunku Informatyka
• ustawianie wartości mnożnika
SCAL: 1.000000
• ustawianie wartości przesunięcia OFFS: 0.000000
• pobranie ostatnio pomierzonej wartości
SET OFFSET?
i jej wyświetlenie oraz użycie jako nowej
wartości przesunięcia
• włączenie / wyłączenie obliczeń
MATH: OFF
MATH: ON
• wzór na obliczanie wyniku
MATH HELP?
Pierwsze dwie pozycje obejmują ustawianie wartości w podobny sposób jak przy ustawianiu granic kontroli.
Ustawienie wartości przesunięcia bieżącym pomiarem następuje po naciśnięciu klawisza Enter. Włączanie i
wyłączanie funkcji obliczeń wykonuje się klawiszami kursorów. Wybranie funkcji pomocy i naciśnięcie klawisza
Enter spowoduje wyświetlenie napisu: (MEAS x SCALE)+OFFS = RESULT opisującego przeprowadzane
obliczenia.
Klawisz Stats dotyczy menu funkcji obliczeń statystycznych. Menu to obejmuje:
• rodzaj wyświetlanej wartości na wyświetlaczu:
− wartość odchyłki standardowej
SHOW: STD DEV
− wartość średnią
SHOW: MEAN
− wartość maksymalną
SHOW: MAX
− wartość minimalną
SHOW: MIN
− wartość aktualną
SHOW MEAS
• ilość pomiarów wchodząca do obliczeń
N:
• włączanie, wyłączanie obliczeń
STATS: ON
STATS: OFF
• obliczenia z wartości mieszczących się w zadanych granicach
USE: IN LIMIT
lub z wszystkich pomiarów
USE: ALL MEAS
• konfigurację klawisza „Stop/Single”
do wykonania pojedynczego pomiaru
ON SINGLE: 1
lub
całej serii N pomiarów
ON SINGLE: N
Zasady ustawiania są podobne jak dla poprzednich menu. W trakcie wykonywania pomiarów i prezentacji obliczeń
statystycznych klawisze
↑ i ↓ służą do szybkiej zmiany wyświetlanej wielkości.
2.3.4. Konfiguracja wejścia
W polach oznaczonych CHANNEL 1 i CHANNEL 2 znajdują się klawisze służące do ustawiania parametrów
układów wejściowych. Cztery z nich są prostymi przełącznikami, natomiast z klawiszem Trigger/Sensitivity
związane jest menu ustalające szereg parametrów układu formującego sygnał wejściowy:
• wybór
automatycznie
AUTO TRG: ON
lub
ręcznie ustalanego progu wyzwalania
AUTO TRG: OF
• dla ustalanego ręcznie progu wyzwalania
LEVEL: 0.0000V
− ustalenie wartości napięcia progowego
• dla automatycznie ustalanego progu
LEVEL: 50 PCT
wyzwalania
− ustalenie procentowej
wartości progu wyzwalania
• rodzaj zbocza wyzwalającego: narastające
SLOPE: POS
opadające
SLOPE: NEG
• czułość wejścia: wysoka
SENSITIVITY: HI
niska
SENSITIVITY: LO
średnia
SENSITIVITY: MED
• dla pomiaru czasu TI 1 TO 2 przełącznik
COMMON 1: OFF
wejścia kanału pierwszego jako wspólnego
COMMON 1: ON
dla generacji sygnału startu i stopu
Zasady wyboru i przełączania są podobne jak w poprzednich punktach. Wyjaśnienia wymaga jedynie
określenie czułości wejścia. Jest to parametr określający najmniejszą wartość amplitudy sygnału wejściowego, dla
której w obwodzie wejściowym jest kształtowany przebieg cyfrowy pozwalający na prawidłową pracę przyrządu,
sygnalizowaną migającą diodą LED umieszczoną obok klawisza Trigger/Sensitivity. Zmniejszenie czułości
pozwala na eliminację zakłóceń występujących w sygnale wejściowym, np. dodatkowego zafalowania o mniejszej
amplitudzie w stosunku do amplitudy sygnału wejściowego.
Pozostałe cztery przełączniki to:
1) przełącznik wejście wysokoomowe (1 M
Ω) / niskoomowe (50 Ω),
2) przełącznik DC/AC,
9
3) włącznik tłumika wejściowego 10x,
4) włącznik filtru dolnoprzepustowego 100 kHz.
2.4. Słownik terminologii angielskiej
attenuation
− tłumienie
duty cycle
− wypełnienie
falltime
− czas opadania
frequency
− częstotliwość
limit
− granica
period
− okres
phase
− faza
ratio
− stosunek
risetime
− czas narastania
sensitivity
− czułość
slope
− zbocze
3. Wykaz sprzętu pomiarowego
1. Oscyloskop HM 303-6
2. Licznik uniwersalny HP 53131A
3. Generator z cyfrową syntezą częstotliwości HM 8131-2
4. Generator sygnału sinusoidalnego HM 8032
5. Generator impulsowy HM 8035
6. Laboratoryjny układ przesuwnika fazowego
7. Laboratoryjny układ przerzutników monostabilnych
8. Trójnik BNC, przewody połączeniowe: BNC-BNC 3 szt., BNC-bananki 2 szt.
4. Zadania pomiarowe
4.1. Oscyloskopowe pomiary częstotliwości i fazy
Oscyloskop może służyć do pomiaru częstotliwości i fazy. Należy jednak zdawać sobie sprawę z dużych
błędów popełnianych podczas tych pomiarów. W zadaniach pomiarowych przedstawione zostaną dwie najczęściej
wykorzystywane metody pomiaru częstotliwości oraz dwie metody pomiaru kąta przesunięcia fazowego.
4.1.1. Pomiar częstotliwości metodą pomiaru okresu
Generator HM 8131-2
f = 2 kHz
U=7 Vpp
Oscyloskop HM 303-6
CH1
1V/cm
przewód
BNC-BNC
Rys. 11. Pomiar częstotliwości oscyloskopem
Połączyć układ pomiarowy przedstawiony na rys. 11. Przed rozpoczęciem pomiarów należy przygotować
oscyloskop do pracy:
1
° wybrać kanał CH1 − przełączniki CHI/II, DUAL i ADD wyciśnięte,
2
° wybrać automatyczną podstawę czasu − przełącznik AT/NM wyciśnięty,
3
° sprawdzić czy płynna regulacja podstawy czasu znajduje się w pozycji
kalibrowana – skrajna prawa pozycja,
4
° sprawdzić, czy jest wyłączone dodatkowe wzmocnienie w kanale X i Y – przełączniki
X-MAG. x 10 i Y-MAG. x 5 wyciśnięte,
5
° sprawdzić, czy jest wyłączony tryb testowania elementów – przycisk COMP. TESTER ON/OFF wyciśnięty.
Ustawić częstotliwość generatora HM 8131-2 równą 2 kHz, napięcie wyjściowe 7 Vpp, rodzaj przebiegu –
sinusoidalny.
W celu ustawienia częstotliwości nacisnąć klawisz FREQ. wprowadzić z
klawiatury liczbę 2000 a następnie nacisnąć klawisz Hz/mV.
Aby ustawić napięcie wyjściowe nacisnąć klawisz AMPL. wprowadzić z
klawiatury liczbę 7 i nacisnąć klawisz kHz/V.
Ustawić optymalną wartość współczynnika podstawy czasu oscyloskopu tak,
by na ekranie zmieścił się jeden okres sinusoidy uzyskanej z generatora.
10
Tablica 1
X
T
cm
D
tx
µs/cm
f
x
Hz
δ
fx
%
Podstawy elektroniki i metrologii na kierunku Informatyka
Zmierzyć okres obserwowanego przebiegu, zapisując w tablicy 1 wynik pomiaru
X
T
w centymetrach oraz
wartość wybranego współczynnika podstawy czasu
D
tx
.
4.1.2. Pomiar częstotliwości metodą figur Lissajous
Zmontować układ pomiarowy pokazany na rys. 12. Ustawić tryb pracy XY oscyloskopu (wciśnięty klawisz
XY).
Ustawić na generatorze HM 8032 częstotliwość 200
Hz wybierając odpowiedni zakres pokrętłem
FREQUENCY i korzystając z pokrętła płynnej regulacji częstotliwości VARIABLE. Pokrętłem AMPL. ustawić
maksymalne napięcie wyjściowe. Ustawić na generatorze HM 8131-2 częstotliwość 400 Hz i napięcie wyjściowe
7 Vpp.
Generator HM 8131-2
f = 400 Hz
U = 7 Vpp
Oscyloskop HM 303-6
CH1 (X) CH2 (Y)
1 V/cm 1 V/cm
Generator HM 8032
f = 200 Hz
50
Ω
OUTPUT
Rys. 12. Pomiar częstotliwości metodą krzywych Lissajous
Zaobserwować krzywe Lissajous dla częstotliwości generatora HM 8032: 200 Hz, 300 Hz, 400 Hz, 600 Hz,
800 Hz. W celu uzyskania nieruchomego obrazu zmieniać w małych granicach częstotliwość generatora HM 8131-
2.
Niewielkie zmiany częstotliwości generatora uzyskujemy po naciśnięciu klawisza FREQ.
a następnie
ustawieniu kursora na wyświetlaczu generatora za pomocą klawiszy
3cur4 na pozycji 0.01 lub 0.001 Hz i
regulację częstotliwości pokrętłem.
Odrysować 2 figury dla częstotliwości 200 Hz i 800 Hz.
4.1.3. Pomiar przesunięcia fazowego oscyloskopem dwukanałowym
Generator HM 8131-2
f = 1000 Hz
Oscyloskop HM 303-6
CH2 1 V/cm
CH1 1 V/cm
R
C
50
Ω
OUTPUT
Rys. 13. Pomiar kąta przesunięcia fazowego oscyloskopem dwukanałowym
Pomiaru dokonać w układzie pomiarowym pokazanym na rys. 13. Przed rozpoczęciem pomiarów należy:
1
° ustawić częstotliwość generatora HM 8131-2 na 1 kHz,
2
° wyłączyć pracę XY i ustawić pracę dwukanałową oscyloskopu w trybie siekanym CHOP. Tryb ten włącza się
wciskając jednocześnie klawisze DUAL i ADD,
3
° ustawić linie zerowe w kanałach CH1 i CH2 w pozycji y = 0 cm,
4
° ustawić optymalną wartość współczynnika podstawy czasu oscyloskopu tak, by na
ekranie zmieścił się jeden okres sinusoidy uzyskanej z generatora,
5
° regulując współczynnik wzmocnienia kanału CH1 regulacją płynną i skokową
doprowadzić do jednakowej amplitudy przebiegów z obu kanałów,
6
° zwiększyć napięcie z generatora tak, by uzyskać wysokość obrazu na ekranie ok.
8 cm.
W tablicy 2 zanotować:
x
T
− okres sinusoidy kreślonej na ekranie i x
τ
− odcinek
proporcjonalny do kąta przesunięcia fazowego.
Tablica 2
x
T
cm
x
τ
cm
ϕ
°
δϕ
%
4.1.4. Pomiar
przesunięcia fazowego metodą figur Lissajous
W układzie jak na rys. 13 ustawić tryb pracy XY oscyloskopu. Regulując napięcie
wyjściowe generatora HM 8131-2 ustalić wysokość figury na około 8 cm. Zmieniając w
sposób płynny wzmocnienie kanału CH1, który w trybie pracy XY połączony jest w z
torem X, ustalić szerokość figury na około 8 cm.
Zmierzyć kąt przesunięcia fazowego notując wartości 2
x
m
i 2
x
0
w tablicy 3. Po
zakończeniu pomiaru ustawić pokrętło płynnej regulacji wzmocnienia w pozycji CAL.
Tablica 3
2x
m
cm
2x
0
cm
ϕ
°
δ
ϕ
%
11
4/5)
4.1.5. Obliczenie teoretycznego przesunięcia fazowego
Zanotować wartości
R = ........... i C = ........... zastosowanego układu całkującego w poprzednich punktach
pomiarowych. Dla częstotliwości generatora
f = 1 kHz obliczyć wartość teoretyczną kąta przesunięcia fazowego
ϕ,
wiedząc że:
RC
ω
ϕ
−
=
)
(
tg
,
f
π
ω
2
=
.
.........
=
teor
ϕ
4.2. Cyfrowe metody pomiaru czasu, częstotliwości i fazy
Zadania pomiarowe mają na celu poznanie właściwości nowoczesnego uniwersalnego przyrządu HP-53131A
oraz zaprezentowanie wybranych metod cyfrowego pomiaru czasu, częstotliwości i fazy. Przyrząd ten ma wewnątrz
mikroprocesor, stąd szereg wyników pomiarów jest uzyskiwanych na podstawie obliczeń z prostych pomiarów sygnału
wejściowego.
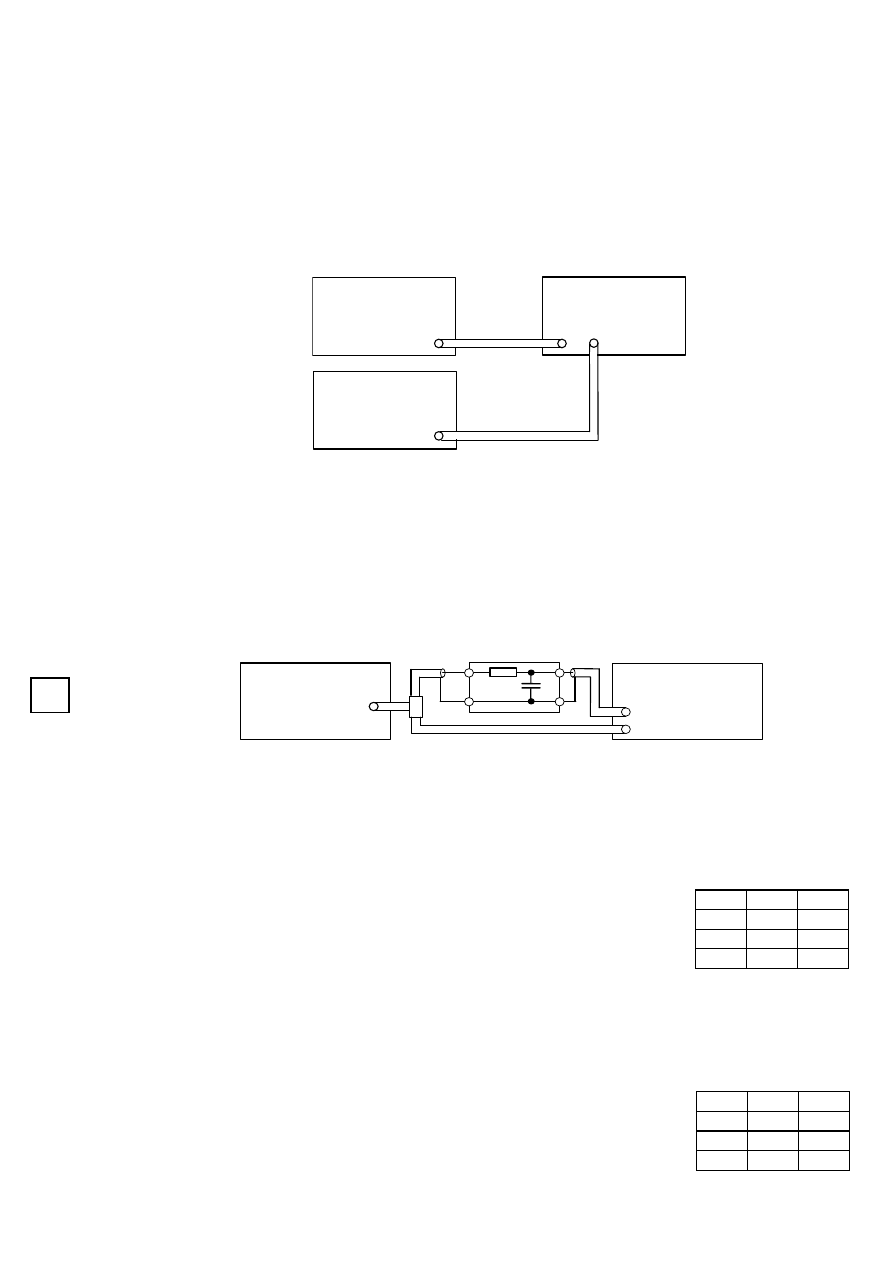
4.2.1. Pomiary czasu trwania i okresu powtarzania impulsów
Przyrząd HP-53131A ma kilka funkcji służących do pomiaru typowych parametrów przebiegu złożonego z
prostokątnych impulsów. Połączyć układ jak na rysunku 14.
Oscyloskop HM 303-6
CH1
Generator HM 8035
FREQUENCY 200 Hz
WIDTH 20 ms
HP 53131A
CH1
- AMPL +
OUTPUTS
50
Ω
Rys. 14. Układ pomiaru parametrów czasowych impulsów prostokątnych
W generatorze impulsów HM 8035 należy ustawić parametry:
• zakres napięcia 2 V - klawisz 2V/5V w pozycji wyciśniętej ,
• przełącznik odwracania polaryzacji impulsu w pozycji wyciśniętej,
• pokrętło skokowej regulacji częstotliwości FREQUENCY w pozycji 200, pokrętło płynnej regulacji
częstotliwości w prawej skrajnej pozycji,
• pokrętło szerokości impulsu WIDTH w pozycji 20 ms, pokrętło płynnej regulacji szerokości impulsu w prawej
skrajnej pozycji,
• pokrętło płynnej regulacji amplitudy w prawej skrajnej pozycji.
Oscyloskop w układzie pełni rolę kontrolną do obserwacji generowanego przebiegu. Należy dobrać parametry
wzmocnienia w kanale Y oraz szybkość podstawy czasu, tak by na ekranie mieścił się jeden okres przebiegu.
Naciskając klawisz Time&Period wybrać pomiar okresu PERIOD 1. Zanotować zmierzoną wartość okresu
powtarzania impulsów w tablicy 4.
Tablica 4
Okres powtarzania impulsów
µ
s
Czas trwania impulsu
µ
s
Czas trwania odstępu między impulsami
µ
s
Współczynnik wypełnienia zmierzony
Współczynnik wypełnienia obliczony
Ustawić pomiar czasu trwania impulsu POS WIDTH 1 i zanotować zmierzoną wartość. Przy pomocy funkcji
NEG WIDTH 1 zmierzyć i zanotować czas pomiędzy impulsami.
Przyrząd HP-53131A posiada funkcję pomiaru współczynnika wypełnienia wybieraną z menu Other Meas.
Wybrać należy DUTYCYCLE 1. Pomierzoną wartość współczynnika wypełnienia wpisać do tablicy 4.
4.2.2. Badanie metody cyfrowego pomiaru częstotliwości
Do wejścia przyrządu HP-53131A doprowadzić sygnał z generatora HM 8131-2 jak na rys. 15. Na generatorze
ustawić częstotliwość 5000 Hz oraz napięcie wyjściowe 3 V pp.
W przyrządzie HP 53131A naciskając klawisz Other Meas przełączyć rodzaj pracy na TOTALIZE 1.
12
Podstawy elektroniki i metrologii na kierunku Informatyka
Generator HM 8131-2
50
Ω
f=5000 Hz OUTPUT
U=3 Vpp
HP 53131A
CH1
Rys. 15. Układ pomiaru częstotliwości
W tym trybie pracy przyrząd HP-53131A pokazuje ilość impulsów zliczonych przez licznik częstościomierza
n
przy zadanym czasie otwarcia bramki
T
p
. Ponieważ czas otwarcia bramki w tym przyrządzie można zmieniać, zatem
daje się doświadczalnie sprawdzić zależność (21).
Czas otwarcia bramki ustawia się w następujący sposób: Nacisnąć klawisz Gate&ExtArm. Klawiszami
kursorów zmienić menu aż do pojawienia się napisu GATE: TIME. Nacisnąć ponownie klawisz Gate&ExtArm.
Pojawi się napis: TIME: 0.100 s.
Za pomocą klawiszy kursorowych zmienić wartość prezentowanej wartości czasu otwarcia bramki. Po
ustaleniu nowej wartości nacisnąć klawisze Enter i Run. Pomiary należy wykonać dla czasów otwarcia bramki
podanych w tablicy 5.
Tablica 5
T
p
s 0,001
0,01 0,1 1 10
n
f
x
Hz
δ
dyskr
.
%
Po zakończeniu pomiarów ustawić czas otwarcia bramki na 0,1 s.
4.2.3. Cyfrowy pomiar stabilności częstotliwości drgań generatorów
Przyrząd HP-53131A posiada umiejętność wykonywania serii pomiarów i
dokonywania obliczeń
statystycznych. Ta właściwość zostanie wykorzystana do porównania stabilności generatora RC HM 8032 i
generatora z cyfrową syntezą częstotliwości HM 8131-2.
Do kanału CH1 przyrządu HP-53131A dołączyć generator HM 8131-2, a do kanału CH2 generator HM 8032.
Ustawić częstotliwości pracy 5000Hz na obu generatorach.
Obsługa obliczeń matematycznych realizowana jest przez klawisze Stats w polu MATH na płycie czołowej
przyrządu. Nacisnąć przycisk Stats. Pojawi się napis SHOW: MEAS. Klawiszami kursorów zmienić na napis
SHOW: STD DEV, wybór pomiaru odchyłki standardowej. Ponownie nacisnąć przycisk Stats. Pojawi się liczba
próbek
N N:100. Używając kursorów zmienić wartość N na 30. Liczbę zatwierdzić naciskając klawisz Enter i
wystartować pomiar klawiszem Run.
Tablica 6
HM 8131-2
HM 8032
std dev
Hz
f
śr
Hz
f
max
Hz
f
min
Hz
Po pojawieniu się liczbowego wyniku pomiaru nacisnąć klawisz Stop/Single. Wyświetlany wynik pomiaru
odchyłki standardowej wpisać do tablicy 6. Dla tej samej serii pomiarowej (nie naciskając ponownie klawisza
Run) odczytać pozostałe wyniki pomiaru:
f
śr
(
ang. MEAN), f
max
,
f
min
.
W tym celu korzystając z klawiszy kursorów: ↑ i ↓ wybrać kolejno wyświetlaną wartość (na chwilę wyświetli
się odpowiednio napis
MEAN, MAX, MIN). Wyniki zapisać do tablicy 6 pamiętając o wpisaniu wszystkich cyfr
z wyświetlacza.
Po zmierzeniu parametrów sygnału generatora HM 8131-2 za pomocą klawisza Freq&Ratio zmienić
wykonywanie pomiarów na tryb FREQUENCY 2 i wykonać analogiczne pomiary sygnału z generatora HM 8032.
Na koniec należy wyłączyć tryb pomiaru parametrów statystycznych. Naciskając klawisz Stats wyświetlić
napis STATS: ON, kursorami zmienić na STATS: OFF i nacisnąć klawisz Run.
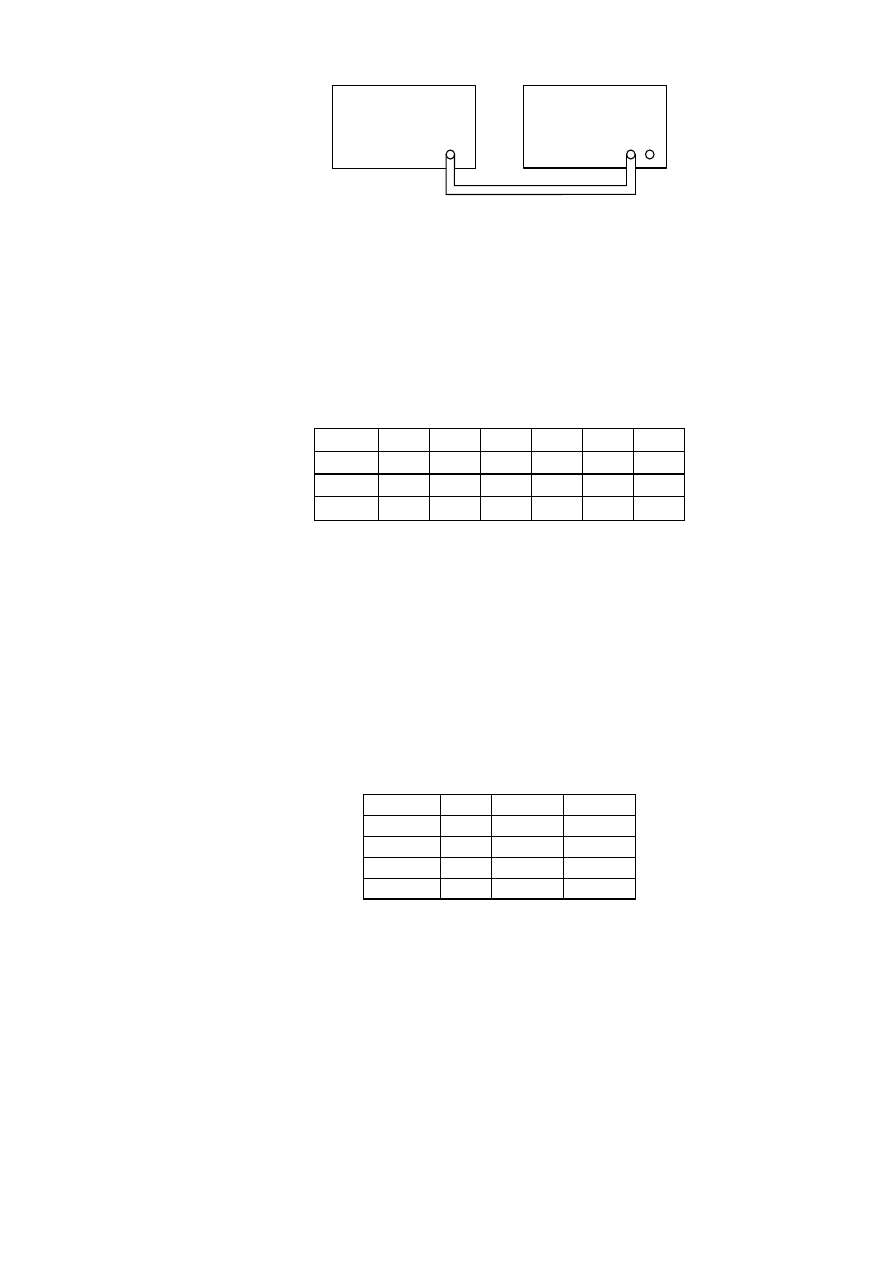
4.2.4. Cyfrowy pomiar kąta przesunięcia fazowego
Połączyć układ pomiarowy jak na rys. 16. Na generatorze HM 8131-2 ustawić częstotliwość 1000 Hz, napięcie
wyjściowe 3 Vpp. W celu eliminacji zakłóceń spowodowanych składowymi przebiegu o wysokich
13
częstotliwościach w obu kanałach przyrządu HP 53131A włączyć filtr dolnoprzepustowy 100 kHz. W obu kanałach
powinno być ustawione jako aktywne narastające zbocze.
Generator HM 8131-2
f=1000 Hz
U=2 Vpp
HP 53131A
100 kHz
Filter
CH1 CH2
R
C
Rys. 16. Cyfrowy pomiar przesunięcia fazowego
Zmierzyć częstotliwość generowanego przebiegu oraz jego okres. Wartości wpisać do tablicy 7.
Tablica 7
f
Hz
T ms
t
0
ms
ϕ
pom.
°
ϕ
obl.
°
Zmierzyć również czas opóźnienia
t
o
wprowadzany przez badany układ całkujący. Do tego celu użyć funkcji
TI 1 TO 2. Obliczyć kąt przesunięcia fazowego z uzyskanych wyników.
360
0
T
t
obl.
⋅
=
ϕ
°
i obliczoną wartość wpisać do tablicy.
Wykonać pomiar kąta przesunięcia fazowego korzystając z funkcji PHASE 1 TO 2 z menu Other Meas.
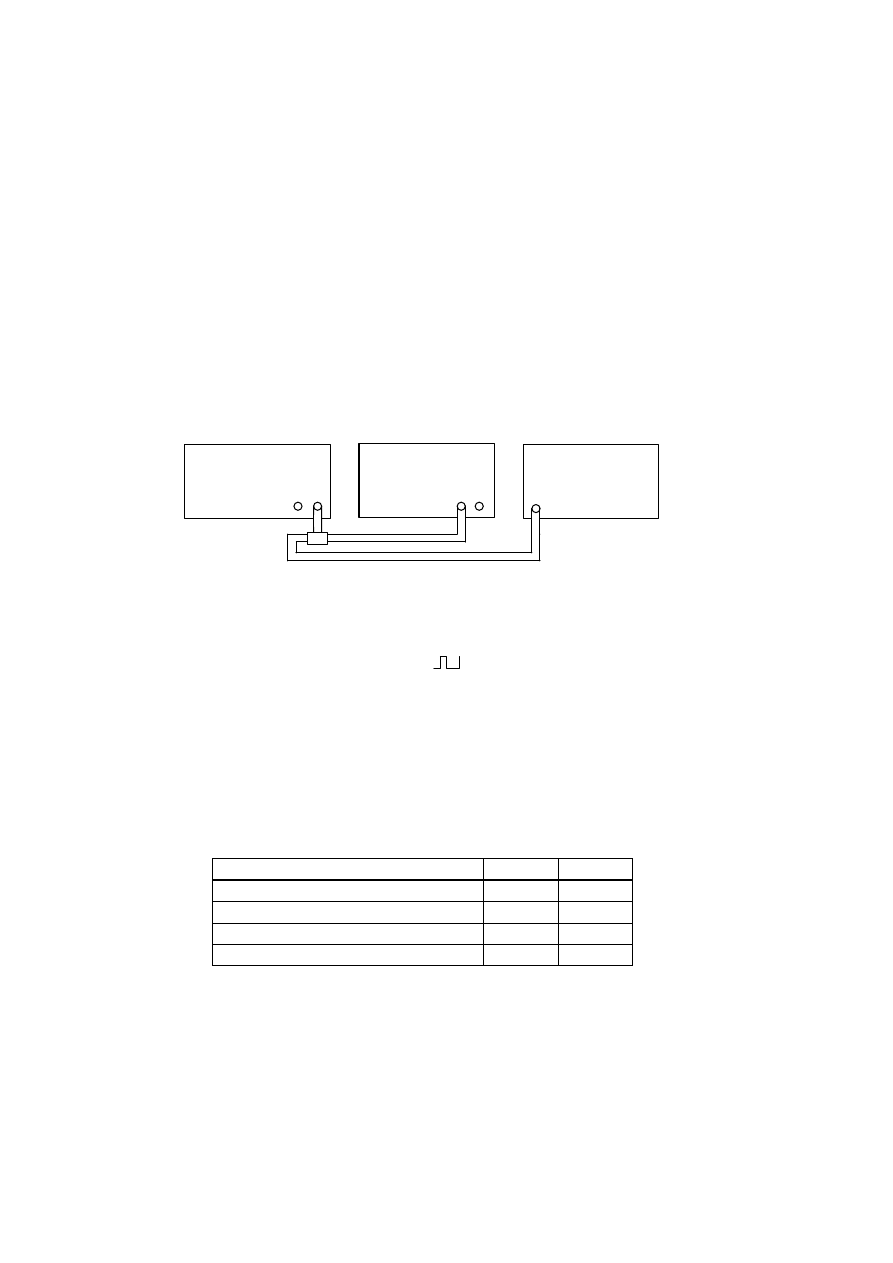
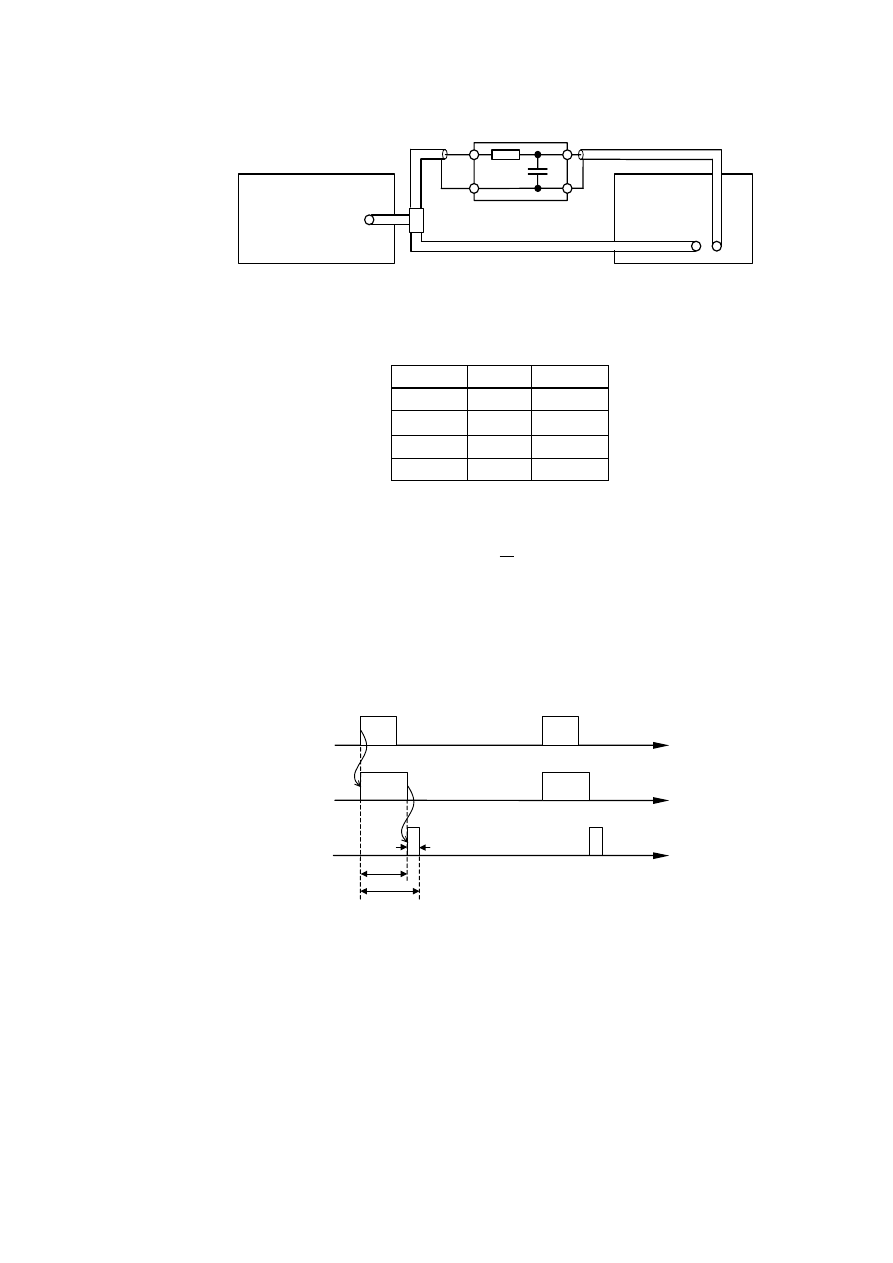
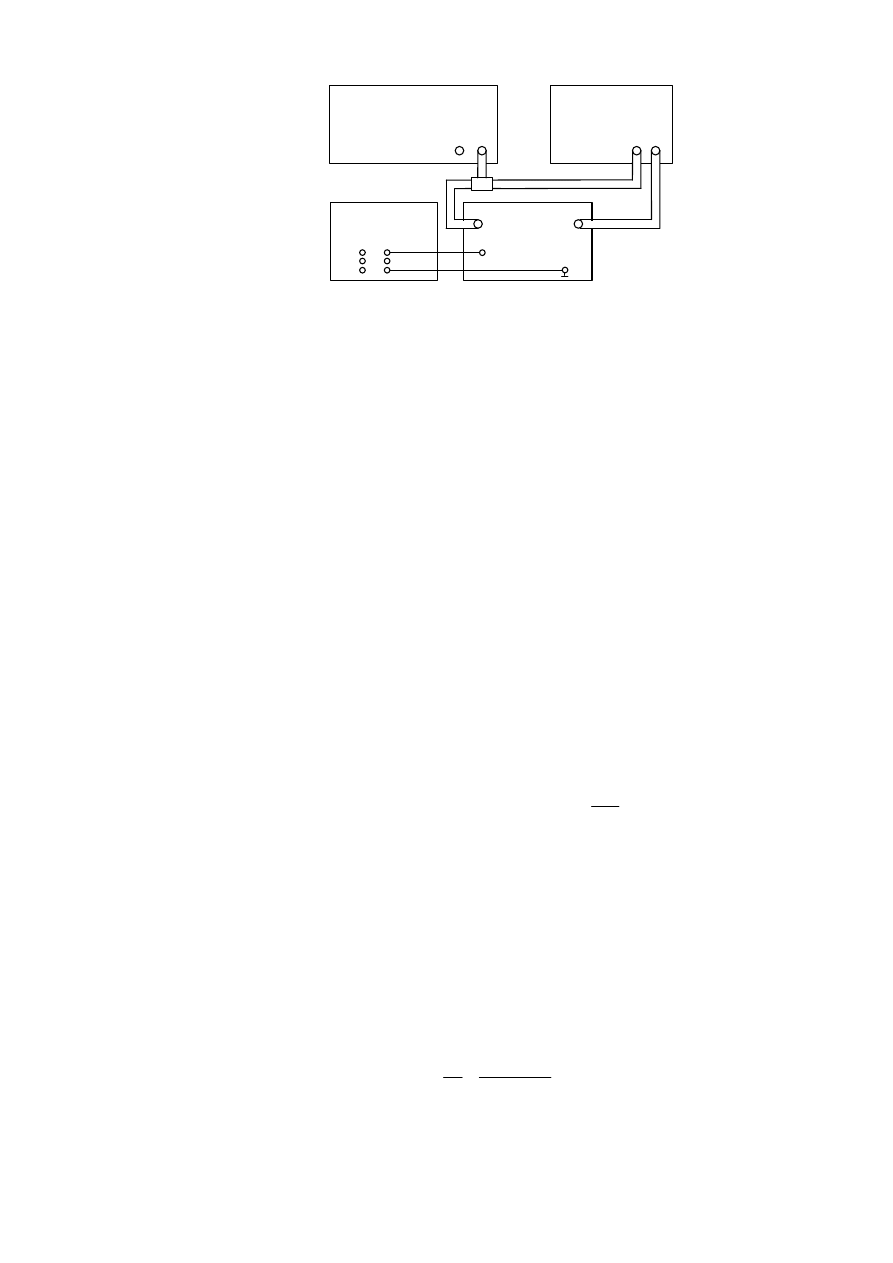
4.2.5. Pomiar czasu (zadanie dodatkowe)
Przyrząd HP 53131A posiada funkcję pomiaru czasu pomiędzy wystąpieniem sygnału START w kanale 1 a
sygnałem STOP w kanale 2. W ćwiczeniu będą mierzone w układzie laboratoryjnym pokazane na rys. 17 czasy
trwania impulsów.
t
T
1
t CH1
T
2
generator
t CH2
T
1+2
przerzutnik 1
przerzutnik 2
Rys. 17. Przebiegi czasowe w układzie laboratoryjnym
Układ laboratoryjny zbudowany jest na bazie układu scalonego 74123, zawierającego dwa monostabilne
przerzutniki o ustalonych czasach trwania impulsów T
1
i T
2
.
Pierwszy przerzutnik jest wyzwalany narastającym zboczem przebiegu prostokątnego z generatora, podanego
na wejście układu laboratoryjnego, a drugi opadającym zboczem impulsu generowanego przez pierwszy
przerzutnik. Drugi przerzutnik generuje krótki impuls na wyjściu układu.
Połączyć układ pomiarowy jak na rys. 18. Przed dołączeniem do układu laboratoryjnego ustawić napięcie
wyjściowe zasilacza na 5 V. Nastawy generatora impulsów HM 8035 pozostawić analogiczne jak w p. 4.2.1,
zwracając szczególną uwagę na wyciśnięcie klawisza 2V/5V.
UWAGA!!!
W pozycji wciśniętej klawisza 2V/5V generator wytwarza przebiegi o amplitudzie do 10V,
natomiast dopuszczalne napięcie wejściowe układu scalonego 74123 wynosi 5 V.
14
Podstawy elektroniki i metrologii na kierunku Informatyka
Generator HM 8035
FREQUENCY 200Hz
WIDTH 20 ms
HP 53131A
CH1 CH2
WE WY
- AMPL +
OUTPUTS
50
Ω
+5 V
Zasilacz
BS 525
+
_
Rys. 18. Układ pomiaru czasu
Klawiszem Time&Period wybrać funkcję pomiaru czasu "TI 1 TO 2". W celu eliminacji zakłóceń w obu
kanałach przyrządu HP 53131A włączyć filtr dolnoprzepustowy 100 kHz. Zapisać czas trwania impulsu pierwszego
przerzutnika 74123:
T
1
= .......... .
Zmienić w przyrządzie rodzaj zbocza początkującego pomiar czasu z narastającego na opadające. W tym celu
należy nacisnąć klawisz Trigger/Sensitivity w polu ustawień dla kanału CH1, aż pojawi się napis SLOPE: POS.
Klawiszem kursora zmienić napis na SLOPE: NEG, co oznacza aktywne opadające zbocze sygnału wejściowego.
Nacisnąć klawisze Enter akceptujący wprowadzoną zmianę zbocza. Analogicznie zmienić rodzaj zbocza
zatrzymującego pomiar czasu. Nacisnąć klawisz Trigger/Sensitivity w polu ustawień dla kanału CH2, aż pojawi
się napis SLOPE: POS, a następnie klawiszem kursora zmienić napis na SLOPE: NEG. Nacisnąć kolejno
klawisze Enter i Run. Przy takim ustawieniu pomierzony zostaje czas trwania impulsu drugiego przerzutnika:
T
2
= .......... .
W celu pomiaru łącznego czasu trwania impulsów obu przerzutników, należy powrócić do zbocza
narastającego początkującego pomiar czasu. W tym celu należy nacisnąć klawisz Trigger/Sensitivity w polu
ustawień dla kanału CH1, aż pojawi się napis SLOPE: NEG i klawiszem kursora zmienić napis na SLOPE: POS
Nacisnąć klawisze Enter i Run. Przy takim ustawieniu pomierzony zostaje łączny czas trwania impulsów obu
przerzutników:
T
1+2
= .......... .
Ponownie ustawić wyzwalanie narastającym zboczem sygnału w kanale CH2.
5. Opracowanie
1. Uzupełnić tablicę 1. Obliczyć błąd systematyczny pomiaru częstotliwości korzystając z metody różniczki
zupełnej wiedząc, że błąd generatora podstawy czasu oscyloskopu
%
100
tx
D
D
tx
ε
wynosi 3%, i przyjmując błąd
odczytu z ekranu oscyloskopu
=1 mm.
T
x
ε
2. Załączyć rysunki figur Lissajous wykonane w p. 4.1.2. uzupełnione graficznym opisem sposobu wyznaczenia
częstotliwości generatora HM 8032 (dla obu figur).
3. Uzupełnić tablice 2 i 3. Obliczyć maksymalne błędy systematyczne
ε
ϕ
pomiarów kąta fazowego stosowanymi w
ćwiczeniu metodami. Skorzystać z metody różniczki zupełnej. Błąd względny
δ
ϕ
pomiaru przesunięcia
fazowego wyznaczyć jako stosunek obliczonej wartości
ε
ϕ
do teoretycznej wartości
ϕ
teor
.
Sprawdzić, czy zmierzona wartość kąta przesunięcia fazowego mieści się w granicach wyznaczonego błędu
względem obliczonej teoretycznej wartości
ϕ
teor
.
4. Obliczyć błąd dyskretyzacji w tablicy 5.
5. Porównać niestabilność obu generatorów. Policzyć niestabilność względną
ε
f
/f dla generatorów ze wzoru:
nom
min
max
f
f
f
f
f
−
=
ε
,
gdzie: f
max
, f
min
−
odpowiednio maksymalna i minimalna wartość częstotliwości w serii pomiarów,
f
nom
−
nominalna wartość częstotliwości generatora
.
15
Wyszukiwarka
Podobne podstrony:
cw3 i 4 instrukcja id 123316 Nieznany
instrukcja laboratoryjna id 216 Nieznany
Copy (2) of FP01
Instrukcja laboratoryjna PR4G
Possible Effects of Strategy Instruction on L1 and L2 Reading
Instrukcja laboratorium ETP ćw 2 2012
LA cw3 instrukcja
copy of cv 06 6SD2QI7NOCKAOJ2LR5AX3IANN2HLISKWERE5CRI
Copy of Notatka z ped porownawczej. 2003 N, ćwiczenia
Copy of Fizjologia przewodu pokarmowego
Operacje na rekordach i przetwarzanie plików Instrukcja laboratoryjna
Instrukcja laboratorium z ochrony środowiska, Górnictwo i Geologia AGH, ochrona środowiska
Copy of Pytania z egz, Inżynieria Środowiska PW semestr I, chemia, sesja
Copy of Scan061, lipiec 06, 200 Nieznany
Instrukcja laboratorium 20 21
instrukcja laboratoryjna dla makiety zd537
Differential Heat Capacity Calorimeter for Polymer Transition Studies The review of scientific inst
więcej podobnych podstron