1
BEZSZCZOTKOWY SILNIK PRĄDU STAŁEGO
1. Budowa
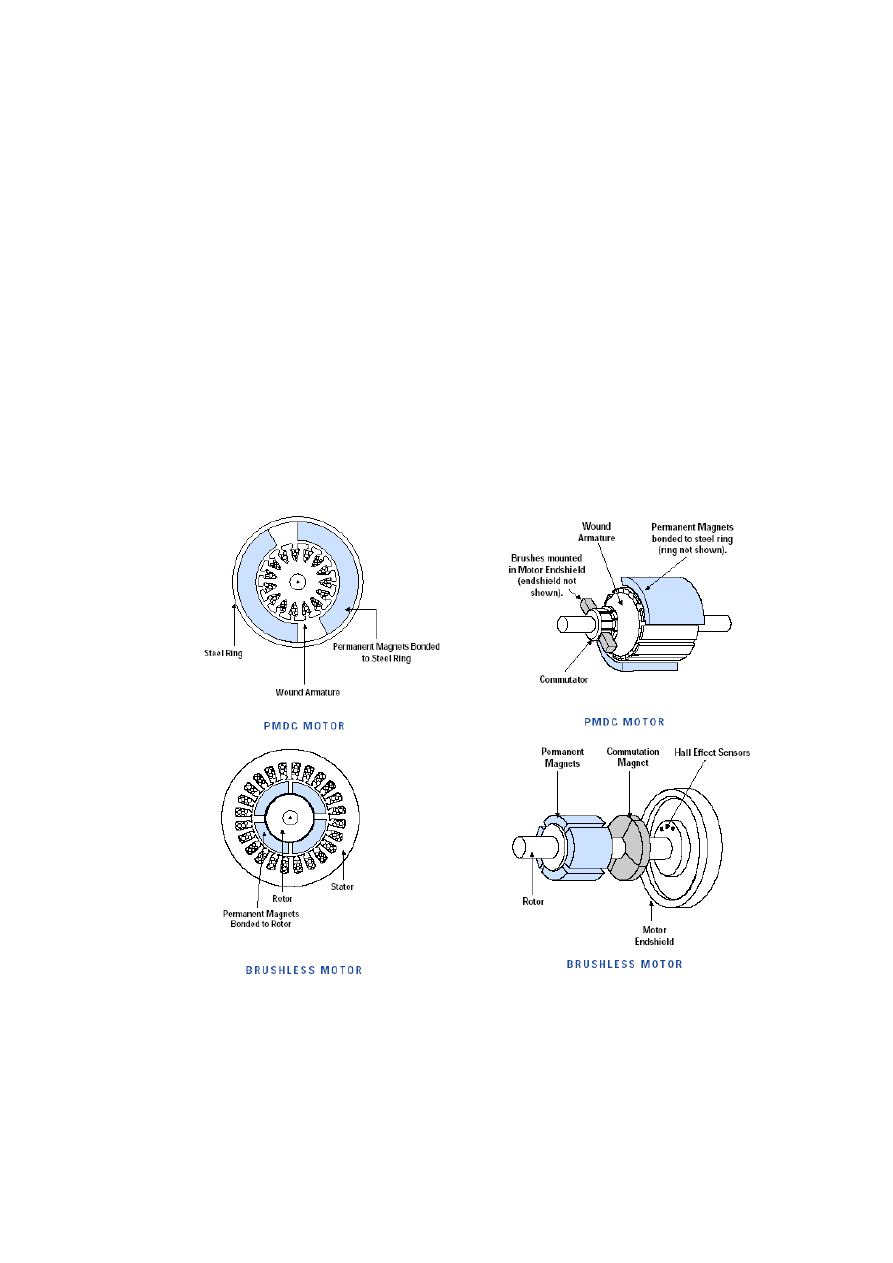
Bezszczotkowy silnik prądu stałego ma budowę podobną do silnika prądu stałego
wzbudzanego magnesami trwałymi. Zasadnicza różnica między nimi polega na tym, że silnik
bezszczotkowy posiada nieruchomy uzwojony stojan i wirujący magnes trwały (rys.1).
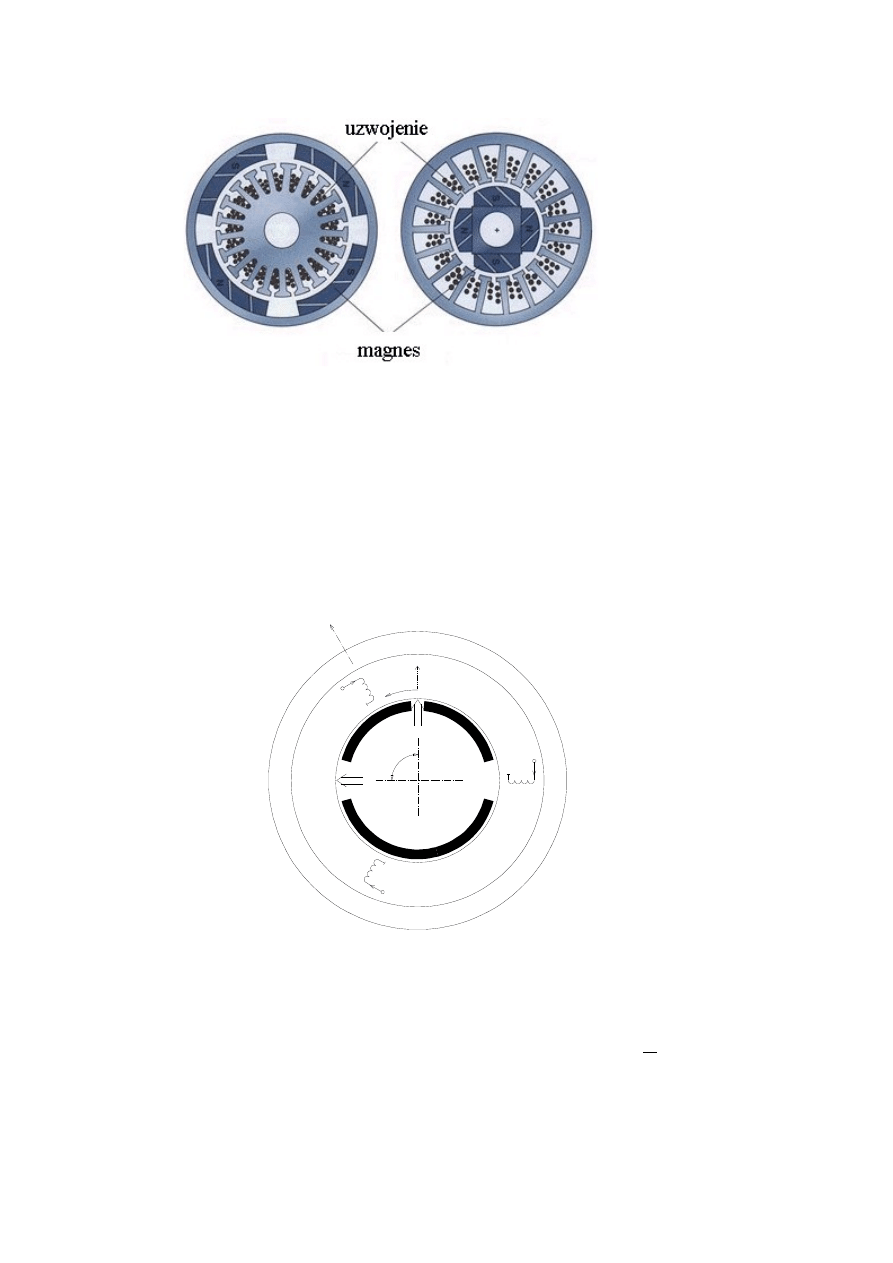
Wirujący magnes może być na zewnątrz uzwojenia (jak w silniku komutatorowym ) , lub
wewnątrz uzwojenia - rys.2. Silniki z zewnętrznym magnesem są na ogół silnikami małej
mocy (silniki wentylatorów małej mocy.
Rys. 1. Porównanie budowy silnika prądu stałego z magnesami trwałymi (PMDC) i silnika
bezszczotkowego (BLDC).
2
Rys. 2. Budowa silnika zmagnesem na zewnątrz uzwojenia i wewnątrz uzwojenia
W miejsce komutatora mechanicznego silnik bezszczotkowy posiada komutator
elektroniczny, składający się z łączników tranzystorowych które łączą poszczególne
uzwojenia do zasilania. Uzwojenia wykonuje się na ogół jako trójfazowe połączone w
gwiazdę. W silnikach b. małej mocy spotyka się uzwojenia dwufazowe (silni taki ma większe
tętnienia momentu).
2. Zasada działnia
Rys.3. Obwód elektromagnetyczny silnika bezszczotkowego prądu stałego.
Celem sterowania komutatorem elektronicznym jest utrzymanie kąta
٢
π
α =
między
strumieniem wzbudzenia
Φ
f
i sumarycznym przepływem twornika
Θ
a
.
α
A
B
C
i
A
i
C
oś
N-S
oś pasma
,,A”
i
B
ω
Φ
f
Θ
α
3
٢
,
π
α
=
Θ
Φ
∠
a
f
Wektor strumienia wzbudzenia
Φ
f
wiruje z prędkością kątową
ω
, zatem z taką samą
prędkością kątową powinien wirować wektor przepływowy twornika
Θ
a
. Utrzymywanie kąta
٢
π
α =
między wektorami
Φ
f
i
Θ
a
jest zadaniem komutatora elektronicznego – rys.3.
Komutator elektroniczny realizuje to zadanie poprzez regulację prądu w pasmach uzwojenia
stojana A, B, C. Jak wiadomo z teorii pola wirującego [2] położenie osi przepływu
wypadkowego
Θ
a
zależy od wartości chwilowych prądu w pasmach uzwojenia i
A
, i
B,
i
C
,.
Odwracając tę zasadę to znaczy jeśli wiemy jakie ma być położenie wektora
Θ
a
(narzuca je
wektor
Φ
f
), to komutator elektroniczny musi dopasować do tego położenia wartości
chwilowe prądów i
A
, i
B
, i
C.
Zatem warunkiem koniecznym poprawnego sterowania
komutatorem elektronicznym jest ciągła obserwacja położenia wektora
Φ
f
. Zadanie to
realizują enkodery.
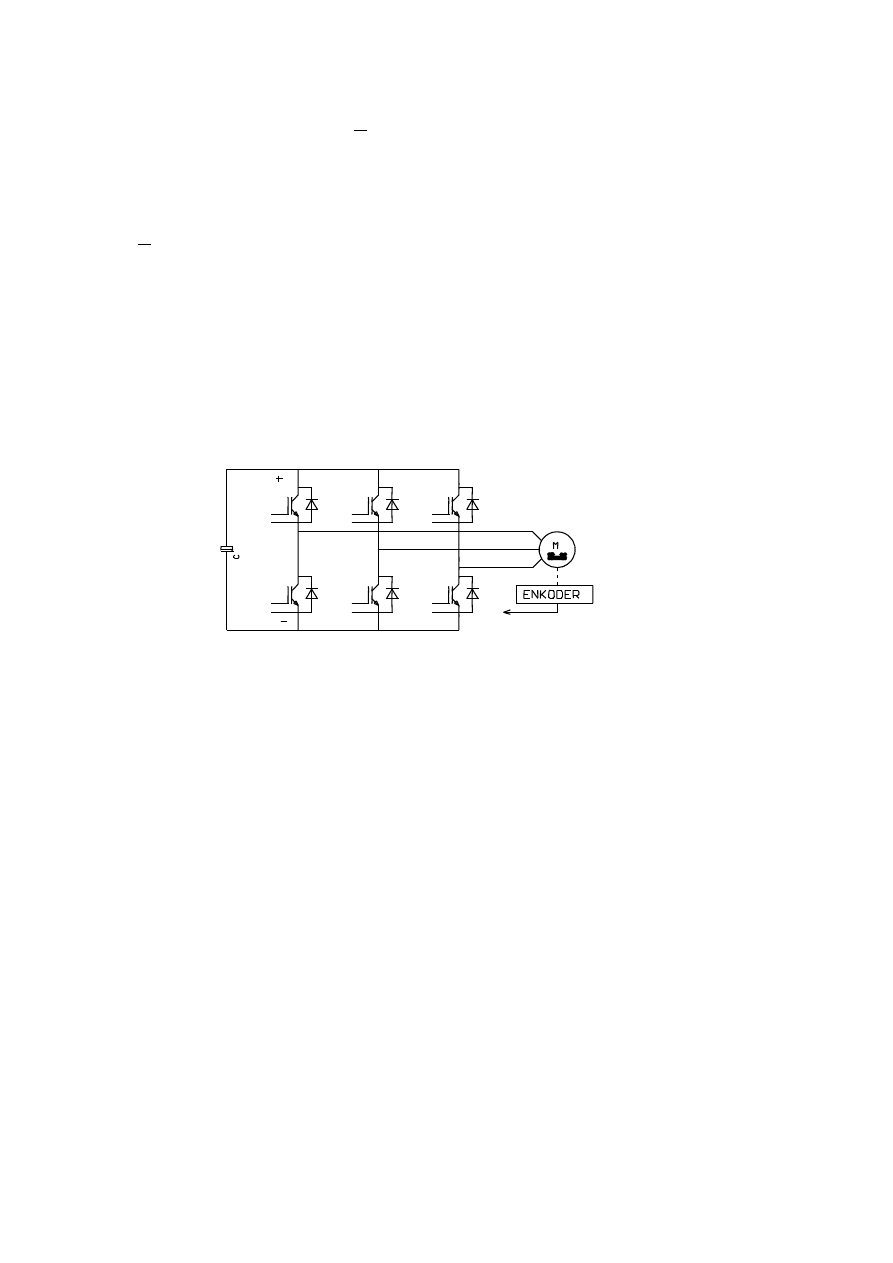
Rys.4. Trójfazowy mostek tranzystorowy do zasilania bezszczotkowego silnika prądu stałego.
3. Sterowanie komutatorem elektronicznym.
W układzie sterowania można wyróżnić dwa niezbędne składniki. Pierwszy to układ kontroli
prądu który jest zwykle zrealizowany jako wysokiej częstotliwości modulator szerokości
impulsów i układu komutatora sprzęgniętego z czujnikiem położenia wirnika. W znakomitej
większości przypadków te dwie funkcje są zawarte w jednym układzie, zawierającym trzy
fazowy falownik wykonany z tranzystorów typu MOSFET lub IGBT - rys. 4.
W zależności od sposobu sterowania tranzystorów mostka możemy uzyskać pracę dwu
-ćwiartkową, lub cztero - ćwiartkową rys.3. Dla trybu pracy dwu ćwiartkowej tętnienia prądu
są mniejsze, nie ma jednak możliwości hamowania oddawaniem energii. Ten tryb pracy może
być stosowany dla małych prędkości. W trybie cztero ćwiartkowym istnieje możliwość
oddawania energii podczas hamowania. Ma to znaczenie w pojazdach akumulatorowych.
W silnikach o mocy kilkaset wat istnieje możliwość zabudowy układu sterowania wewnątrz
obudowy silnika.
Za wyjątkiem silników bardzo małej mocy, w celu uniknięcia uszkodzeń tranzystorów mocy
konieczny jest pomiar prądu płynącego przez uzwojenia.
Stosowane są dwa sposoby sterowania komutatorem elektronicznym [1]:
•
sterowanie trapezowe
•
sterowanie sinusoidalne.
4
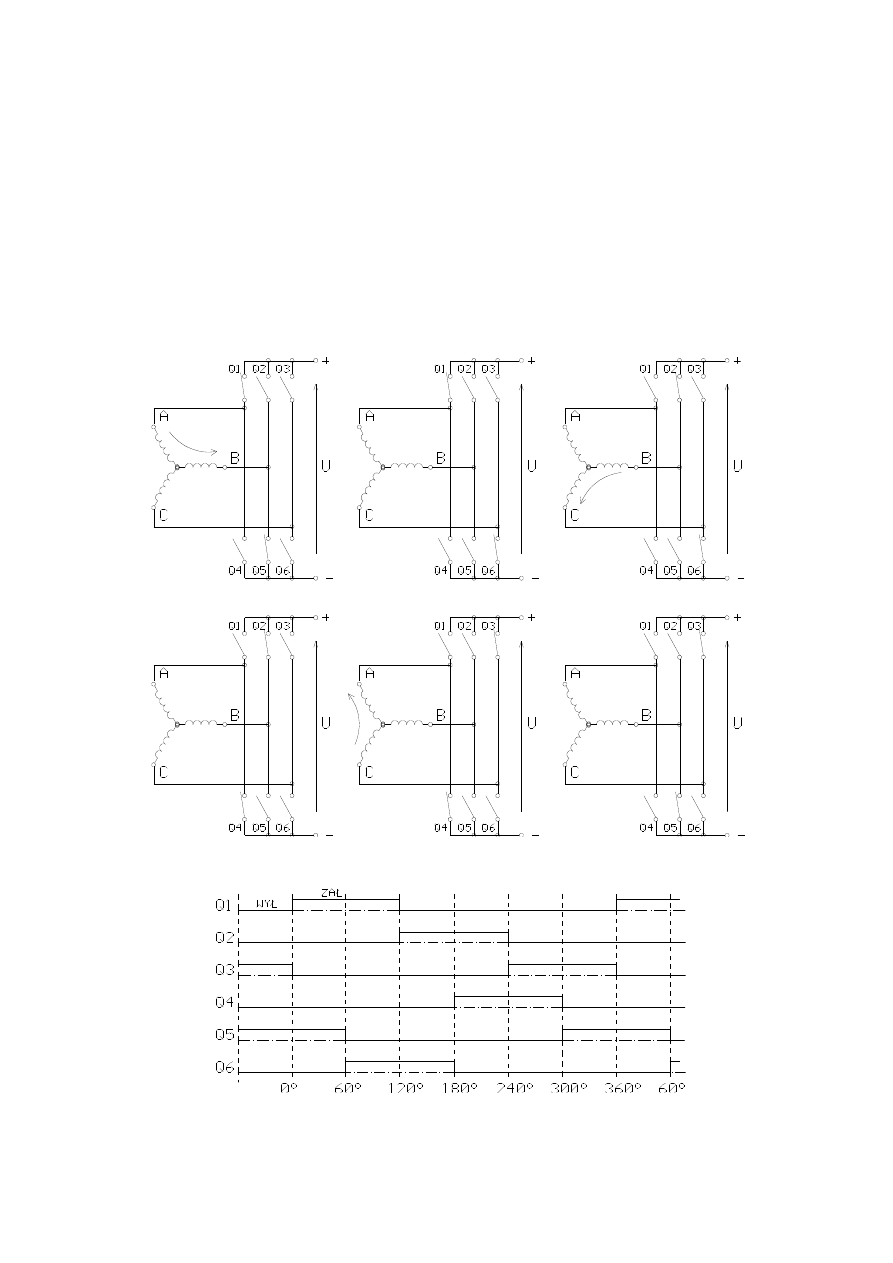
Sterowanie trapezowe .
Sterowanie trapezowe polega na tym, że przy połączonych pasmach uzwojenia w
gwiazdę, prąd płynie tylko w dwóch pasmach uzwojenia, w trzecim paśmie uzwojenia prąd
jest równy zero.
Zasilanie poszczególnych pasm jest sekwencyjnie przełączane zgodnie z wirowaniem wektora
Φ
f
. Taki sposób sterowania powoduje, że prąd płynie tylko w dwóch pasmach uzwojenia.
Przy przełączeniu prądu z jednego pasma na drugie następuje zmiana położenia wektora
przepływu
Θ
a
. Tak więc kąt
α
zmienia się w czasie jak to pokazano na rys.6.
Sekwencję przełączania uzwojenia trójfazowego połączonego w gwiazdę przedstawiono na
rys. 5.
Rys.5. Kolejne etapy sterowania komutatorem elektronicznym (sterowanie trapezowe).
t
t
t
K
K+1
2
π
α
5
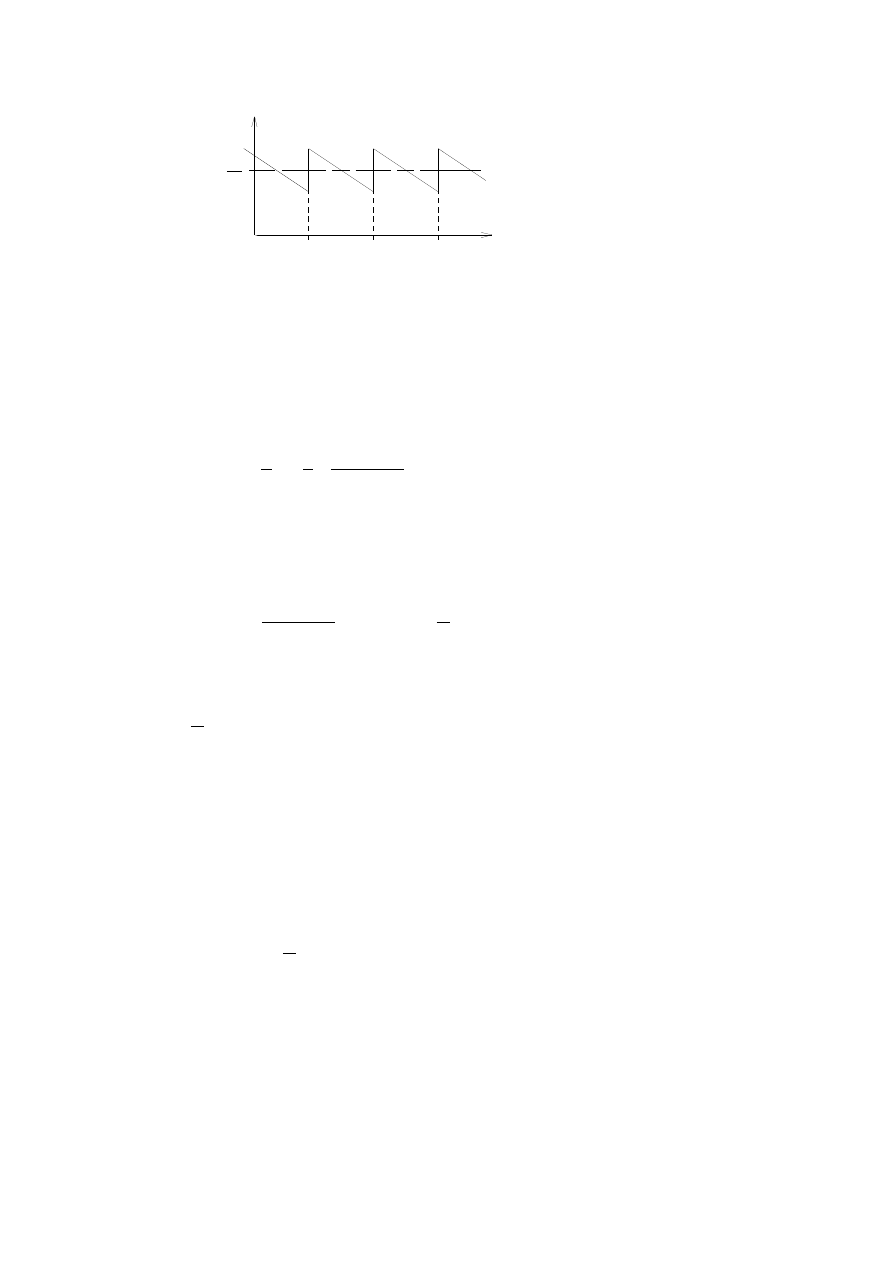
Rys.6. Kąt
ϑ
między wektorami
Φ
f
i
Θ
a
przy sterowaniu trapezowym.
Funkcję zmiany kata w czasie można także zapisać analitycznie.
( )
k
t
k
t
k
t
t
t
−
+
−
−
=
١
٣
١
٣
٢
π
π
α
١
+
〈
〈
k
t
t
k
t
dla
Wartość średnia kąta
α
(t)
( )
٢
١
١
١
π
α
α
=
∫
+
−
+
=
dt
k
t
k
t
t
k
t
k
t
śr
Jak zatem widać sterowanie trapezowe utrzymuje wartość średnią kąta między wektorami
Φ
f
i
Θ
a
równą ٢
π
. Prostota tego sterowania polega na tym, że enkoder sterujący pracą
komutatora elektronicznego wskazuje kiedy na dane pasmo uzwojenia należy załączyć
napięcie. Wyłączenie napięcia następuje w chwili załączenia napięcia na kolejne pasmo.
Enkoder pracuje zatem jak przekaźnik (zero, jeden).
Sterowanie sinusoidalne
Sterowanie sinusoidalne polega na tym, że kąt między wektorami
Φ
f
i
Θ
a
ma wartość stałą
( )
٢
π
α
=
t
Aby takie sterowanie można było realizować należy śledzić w sposób ciągły położenie
wektora
Φ
f
. Chwilowa wartość prądu w poszczególnych pasmach uzwojenia musi być tak
regulowana aby uzyskiwać pożądane położenie wektora
Θ
a
. Enkoder realizujący to zadanie
jest układem bardziej złożonym, a komutator elektroniczny musi realizować kluczowanie
tranzystorów w systemie modulacji szerokości impulsów (MSI), aby np. przy stałej prędkości
wirowania wirnika (
ω
= const). Wartości średnie prądów w pasmach uzwojenia zmieniły się
sinusoidalnie.
6
4. Enkodery
Rozpatrzymy trzy typy enkoderów stosowane do sterowania komutatorem
elektronicznym: halotronowe, optoelektroniczne i elektromagnetyczne.
Enkodery halotronowe
Najprostszym enkoderem jest enkoder halotronowy , składa się on z nieruchomej tarczy na
której przymocowane są halotrony [3]. Liczba halotronów jest równa liczbie pasm
uzwojenia. Halotrony są rozmieszczone symetrycznie na obwodzie na średnicy magnesów
trwałych, kąt między halotronami wynosi
p
٣
٢
π
. Tarcza halotronowa jest umieszczona w
pobliżu wirnika tak aby pole magnetyczne rozproszenia magnesów trwałych przenikało
przez halotrony. Pole to wysterowuje halotron, który przekazuje sygnał do połączonego z nim
klucza energoelektronicznego. Jest to najprostszy typ enkodera pracującego w systemie (0,1)
który realizuje sterowanie trapezowe komutatora elektronicznego. Enkoder ten jest
powszechnie stosowany w silnikach małej mocy. W silnikach większej mocy pracujących
przy dużych przeciążeniach prądowych staje się zawodny, gdyż jego pracę zakłóca pole
magnetyczne rozproszenia generowane przez czoła uzwojenia stojana. Konsekwencją tego
może być błędne wysterowanie zaworów energoelektronicznych i zwarcia w układzie.
Modyfikacją tego rozwiązania można zrealizować poprzez ekranowanie halotronów od pola
rozproszenia czół uzwojenia. Innym rozwiązaniem jest wzbudzenie halotronów z
dodatkowych magnesów trwałych o liczbie biegunów równej liczbie biegunów silnika.
Zastosowanie magnesów dodatkowych umożliwia zabudowanie enkodera zarówno
wewnątrz silnika jak i na zewnątrz.
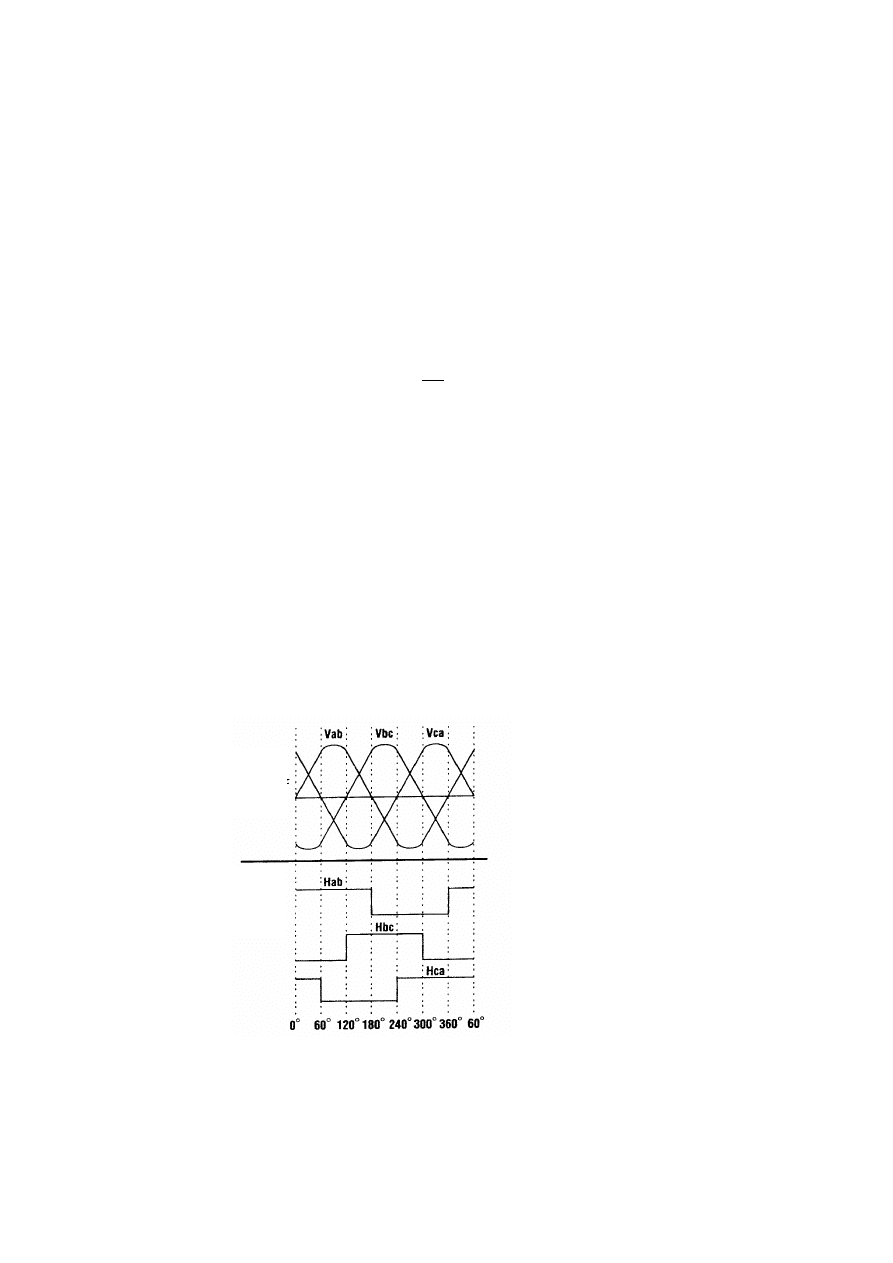
Rys.7. Sygnały wyjściowe enkodera na tle napięć indukowanych w silniku.

7
4. Program ćwiczenia
Schemat układu pomiarowego zamieszczono na rys.8.
W układzie jak na rys.7 pomierzyć następujące charakterystyki:
I
zas
, n,
η
s
, = f(U
zas
) dla M=0
I
zas
, n,
η
s
, = f(M) dla U
zas
= const
gdzie:
−
I
zas
prąd pobierany z sieci,
−
n
prędkość obrotowa
− η
s
-
sprawności silnika,
−
M
moment obciążenia silnika.
−
U
zas
napięcie zasilania
Sprawność silnika szeregowego zasilanego z przerywacza należy porównać ze sprawnością
silnika zasilanego z sieci prądu stałego (pomiary przeprowadzone w czasie poprzednich
ćwiczeń).
Literatura
1. Glinka T.: Maszyny elektryczne wzbudzane magnesami trwałymi. Wydawnictwo Pol.
Śląskiej, 2002r
2. Plamitzer A.: Maszyny elektryczne. WNT, 1985.
3. Katalog halotronów -
4.
Document Outline
Wyszukiwarka
Podobne podstrony:
bezszczotkowy silnik pradu stalego
silnik prądu stal 2, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola, ELEKTRA
Model silnika pradu stalego id Nieznany
Naped z bezszczotkowym silnikie Nieznany
Model silnika pradu stalego id Nieznany
silniki prądu stałego
silnik pradu stalego
Badanie silnika pradu stałego
03 Badanie obwodow pradu staleg Nieznany (2)
18 Silnik uniwersalnyid 17837 Nieznany
silnik prądu stałego (tyrystor), Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola
5 pradnice i silniki id 40384 Nieznany
DTR Silnik prądu stałego LD 020 LD 030 LD 055 2
Badanie obwodow pradu stalego i Nieznany
silnik prądu stałego sterowany1, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola
Ściągi z fizyki-2003 r, Silnik prądu stałego i prądnica prądu zmiennego
Silnik prądu stałego sprawko
więcej podobnych podstron