13
E l e k t r o n i k a d l a W s z y s t k i c h
Czy spełniają się futurystyczne wizje Stani−
sława Lema i innych pisarzy science fiction
prorokujących już wiele lat temu, że wraz
z rozwojem techniki degenerować i zanikać
będą niektóre, coraz mniej używane części
naszego organizmu? Pamiętam opowiadanie
SF o megacefalach i mikrocefalach: u części
ludzkości coraz mniej używającej zdolności
umysłowych, zajmującej się jedynie pracą fi−
zyczną, głowa uległa uwstecznieniu i zrobiła
się kilkakrotnie mniejsza (mikrocefale).
Z kolei u części ludzkości zajmującej się wy−
łącznie pracą umysłową, głowa się powięk−
szyła (megacefale), rozwinął się też palec
wskazujący prawej ręki, natomiast pozostałe
palce, korpus i kończyny uległy degeneracji
do tego stopnia, że megacefale nie mogły się
poruszać o własnych siłach.
Na razie nie widać, żeby głowy poszcze−
gólnych osobników naszego gatunku znaczą−
co różnicowały swą wielkość, ale palce...
Obejrzyj swoje palce i sprawdź, czy aby taka
przerażająca wizja nie staje się pomału fak−
tem. Bo faktem jest, że palec naciskający na
guzik pilota to znak naszych czasów. Nie−
przypadkowo też niektórzy nazywają pilot
elektronicznym różańcem...
Pomyśl, ile pilotów jest w Twoim domu.
Czy ich liczba przekracza cztery? Czy chcesz
dodać do tej kolekcji jeszcze jeden? Taki ład−
ny, mały, z jednym przyciskiem?
Jeśli z góry nie odrzucasz takiej możliwo−
ści, czytaj dalej.
Dla zachęty dodam, że opisywany system
funkcjonuje w moim domu od dwóch lat, a ja
dopiero teraz wziąłem się za pisanie artykułu
o tym pożytecznym drobiazgu. Co ważne,
system jest współużytkowany w pokoju,
gdzie pracują inne piloty i dzięki prostym
rozwiązaniom zupełnie nie reaguje na ich sy−
gnały. Jest odporny na takie obce sygnały,
a jednocześnie nie zakłóca pracy innych
zdalnie sterowanych urządzeń.
Uwaga!
W odbiorniku występują napięcia gro−
źne dla życia i zdrowia! Osoby niepeł−
noletnie i niedoświadczone mogą wyko−
nać układ wyłącznie pod opieką wy−
kwalifikowanych opiekunów.
To, że tak długo zwlekałem z artykułem,
nie jest objawem lenistwa – wprost przeciw−
nie. Oznaką lenistwa jest raczej to, że wyko−
nałem opisywany system zdalnego sterowa−
nia. Nie chciało mi się po prostu codziennie
wyłączać stojącej lampy. Mój problem pole−
gał na tym, że w pokoju gościnnym jest duża
lampa z abażurem. Wtyczka lampy jest we−
tknięta w gniazdko, a wyłącznik jest umie−
szczony na kablu, a nie, jak w niektórych du−
żych lampach stojących, tuż pod żarówką.
Żeby włączyć i wyłączyć lampę, trzeba
było „zanurkować” pod rozłożyste gałęzie fi−
kusa lirolistnego, jako że moja żona jest mi−
łośniczką kwiatów. Takie operacje związane
z obsługą lampy znudziły mi się całkowicie,
więc poświęciłem kiedyś cały dzień na wy−
konanie pilota i odbiornika pozwalającego
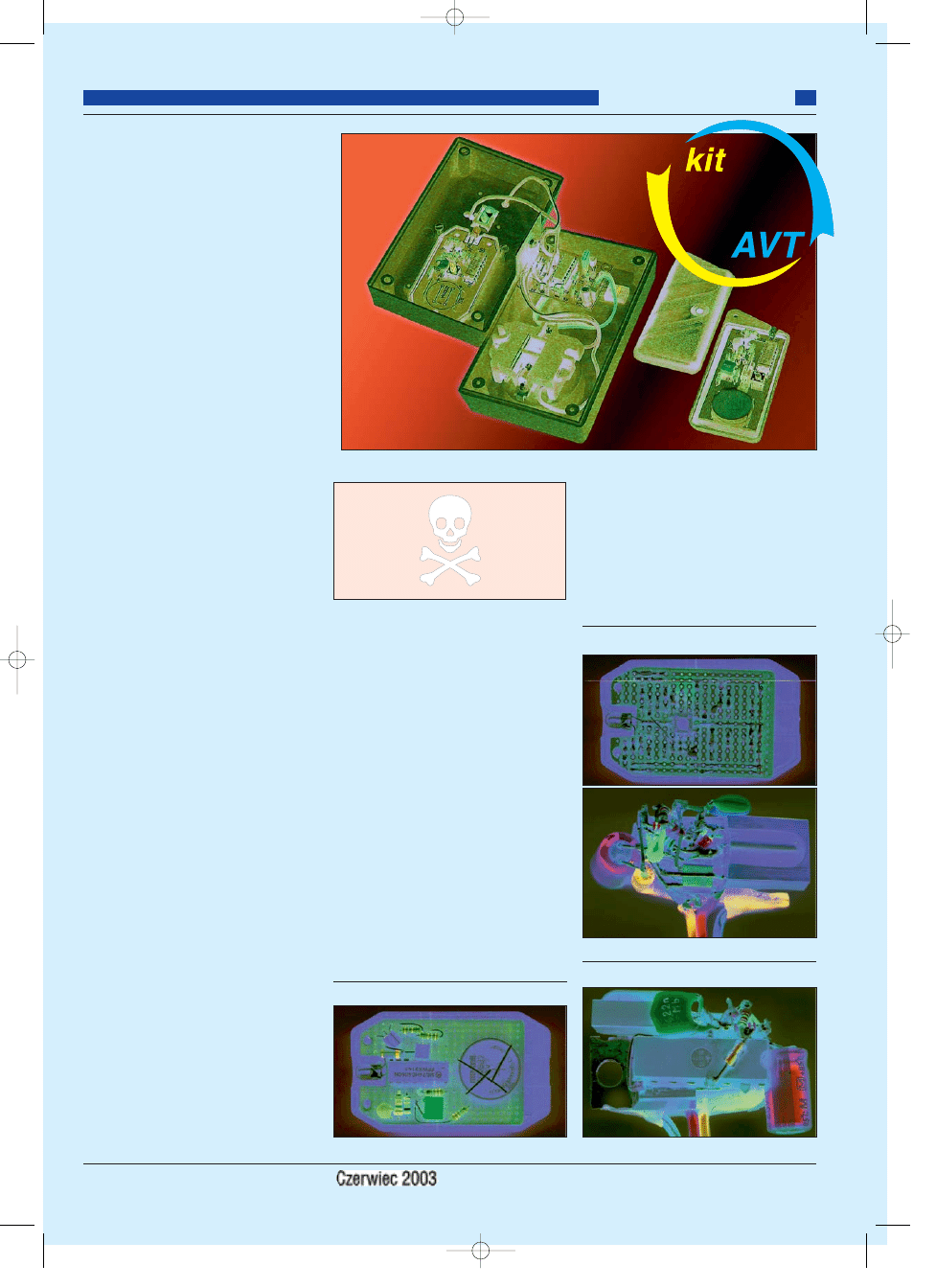
zdalnie obsługiwać rzeczoną lampę. Foto−
grafie 1...4 pokazują efekty tamtej pracy. Pi−
lot zmontowany na kawałku płytki uniwer−
salnej pracuje do dziś. Trzeba było tylko
dwukrotnie wymienić plastikową obudowę
(KM−15N), bo wyłamała się w niej membra−
na, którą się przyciska podczas obsługi pilo−
ta. Jak widać, pierwszy, prototypowy model
odbiornika, pokazany na fotografiach 3 i 4,
zmontowałem z klasycznych elementów
w postaci zwartego „pająka” i ma on zadzi−
wiająco małe wymiary (1,5x1,6x3,2cm).
Odbiornik został umieszczony tuż pod
oprawką żarówki w małym plastikowym
2
2
2
2
6
6
6
6
6
6
6
6
7
7
7
7
N
N
N
N
a
a
a
a
jj
jj
p
p
p
p
rr
rr
o
o
o
o
ss
ss
tt
tt
ss
ss
zz
zz
e
e
e
e
zz
zz
d
d
d
d
a
a
a
a
ll
ll
n
n
n
n
e
e
e
e
ss
ss
tt
tt
e
e
e
e
rr
rr
o
o
o
o
w
w
w
w
a
a
a
a
n
n
n
n
ii
ii
e
e
e
e
Fot. 2 Nadajnik
Fot. 1 Nadajnik
Fot. 3 Odbiornik
Fot. 4 Odbiornik
Projekty AVT
H H
H H
zdal ster najp.qxd 7/26/2004 12:52 PM Page 13
14
E l e k t r o n i k a d l a W s z y s t k i c h
przezroczystym pudełku. Aby dostać się do
przewodów, trzeba było częściowo rozebrać
lampę, ale trud się opłacił i wszyscy domow−
nicy doceniają teraz zalety małego pilota
(o ile się chwilowo gdzieś nie zawieruszy).
Ponieważ układ sprawdził się w ciągu
wielu miesięcy użytkowania, uznałem, że
warto go opisać. Nie jesteś jednak skazany
na prowizorkę – w międzyczasie Zbyszek
Orłowski zaprojektował płytki drukowane
pilota i odbiornika. Ze względu na kłopoty
z wyłamywaniem się membrany obudowy
KM−15N powstała nowa płytka do obudowy
KM−14. I takie rozwiązanie opisane jest
w artykule.
Opis układu
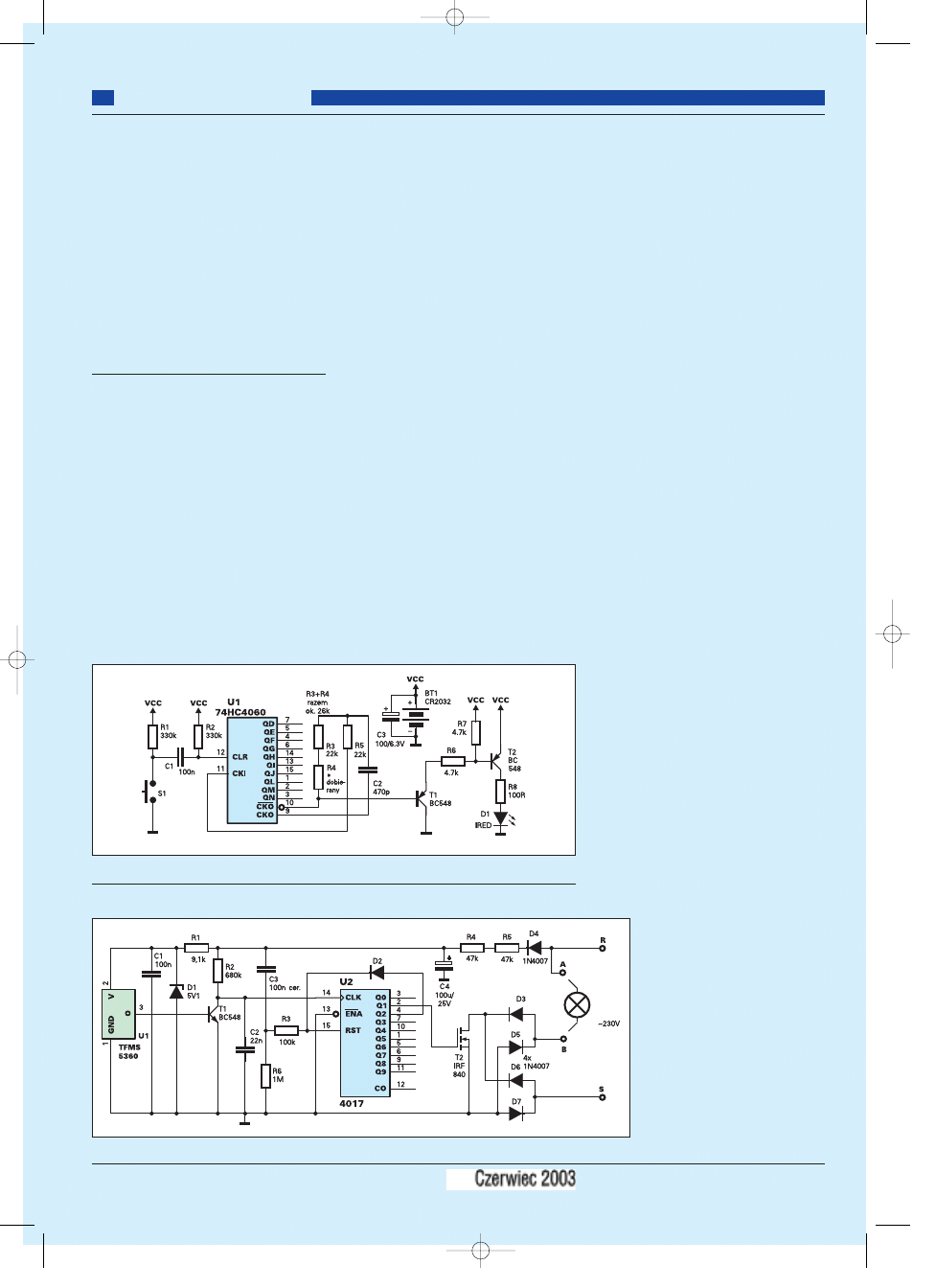
Schemat ideowy pilota pokazany jest na ry−
sunku 1. Jest to nadajnik impulsów podczer−
wieni o częstotliwości 36kHz (które są na−
stępnie odbierane przez znany układ
TFMS5360 lub SFH506−36). W pilocie po−
pularny układ scalony CMOS 4060 w wersji
74HC4060 pracuje wyłącznie w roli genera−
tora częstotliwości nośnej 36kHz. Jak wi−
dzisz, wykorzystałem tylko oscylator. Dziel−
niki kostki są niewykorzystane. Taki sam
oscylator można zbudować z dwóch jakich−
kolwiek bramek. Popularną kostkę
74HC4060 wykorzystałem tylko dlatego, że
nie miałem pod ręką układu 74HC00 ani
74HC04. W każdym razie chodzi o wyko−
rzystanie układu scalonego, który może pra−
cować przy napięciach zasilania poniżej
3V i który przy napięciu zasilania rzędu
3V będzie miał możliwie dużą wydajność
prądową. Dlatego musi to być układ z rodzi−
ny 74HC.
Przebieg prostokątny z oscylatora poda−
wany jest na wzmacniacz z tranzystorami
T1, T2. W zasadzie T1 można byłoby pomi−
nąć i dołączyć R6 wprost do nóżki 10 (albo
9). Jednak obecność T1 redukuje obciążenie
wyjścia do znikomej wartości i tym samym
zauważalnie zwiększa stabilność generatora.
Rezystory R6, R7 ograniczają prąd bazy T2.
Jak widać, prąd nadawczej diody IRED
ogranicza rezystor R8 o dużej, jak na piloty,
wartości 100
Ω. Ogranicza to szczytowy prąd
diody do kilkunastu miliamperów, a średni
prąd jest poniżej 10mA. Mimo wszystko,
dzięki dużej czułości odbiornika tak niewiel−
ki prąd zapewnia wystarczająco duży zasięg.
Właśnie dzięki ograniczeniu poboru prądu
do wartości poniżej 10mA możliwe stało się
wykorzystanie do zasilania pilota jednej ma−
leńkiej baterii litowej CR2032. W pierw−
szych modelach nadajnika nie było konden−
satora filtrującego C3, a układ pracował po−
prawnie właśnie dzięki małemu poborowi
prądu. Zastosowanie kondensatora C3 do−
datkowo zwiększa stabilność częstotliwości,
a w przypadku korzystania ze zużytej baterii
nieco zwiększa zasięg.
Tak mała bateryjka wystarczy na bardzo
długo, ponieważ niezależnie od czasu naci−
skania przycisku S1 nadajnik wysyła tylko
jedną „paczkę impulsów”. Obwód R1, C1,
R2 zapewnia, że dowolnie długie naciskanie
przycisku spowoduje wygenerowanie „pacz−
ki impulsów” o całkowitym czasie trwania
dłuższym niż 15ms. Oznacza to, że po naci−
śnięciu przycisku pilot wysyła co najmniej
500 impulsów o częstotliwości 36kHz. Sca−
lone odbiorniki impulsów podczerwieni typu
TFMS/SFH z powodzeniem reagują też na
znacznie krótsze „paczki impulsów” – do
wywołania reakcji takiego odbiornika wy−
starczy „paczka” o długości 400...600µs,
czyli nawet kilkanaście impulsów nośnych
o częstotliwości 36kHz. W systemie celowo
przedłużyłem czas trwania „paczek impul−
sów” do wartości powyżej 15ms. Właśnie ta−
kie bardzo proste rozwiązanie pozwala na
bezbłędną pracę systemu nawet w obecności
pilotów o częstotliwości 36kHz. Według do−
stępnych źródeł, najdłuższy nieprzerwany
impuls z typowych, fabrycznych pilotów ma
czas trwania nieprzekraczający 9ms. Choć
więc sam układ TFMS/SFH będzie odbierał
sygnały pilotów, nasz system odbiorczy nie
będzie reagował na ich krótkie impulsy. Za−
reaguje tylko na znacznie dłuższe impulsy
naszego pilota. Pełny schemat ideowy urzą−
dzenia odbiorczego pokazany jest na rysun−
ku 2. Impulsy podczerwieni są odbierane
przez scalony odbiornik U1 (TFMS/SFH).
W stanie spoczynku na wyjściu układu U1
(nóżka 3) panuje stan wysoki, a więc w spo−
czynku tranzystor T1 jest otwarty. Konden−
sator C2 jest całkowicie rozładowany. Jeśli
pojawi się paczka impulsów podczerwieni,
napięcie na wyjściu U1 spada i zostaje za−
tkany T1. Zaczyna rosnąć napięcie na kon−
densatorze C2, ładowanym przez rezystor
R2. Dopiero gdy napięcie to przekroczy próg
przełączania wejścia CLK (nóżka14 U2),
licznik 4017 zwiększy swój stan. Tym sa−
mym obwód R2, C2 decyduje, jakie najkrót−
sze „paczki” impulsów spowodują reakcję
urządzenia. Popularny układ CMOS 4017
pracuje tu w roli przerzutnika T. Zapewnia to
dioda D2 skracająca cykl zliczania do dwóch
stanów: 0, 1. Zliczenie kolejnego impulsu
powoduje pojawienie się stanu wysokiego
na wyjściu Q2 i wyzerowanie licznika. Gdy
na wyjściu Q1 licznika panuje stan
wysoki, otwarty jest tranzystor T2
i obciążenie jest włączone. Obwód
C3, R6 zapewnia zerowanie liczni−
ka po włączeniu zasilania. Wartość
C3 można zwiększyć do wartości
470nF – muszę przyznać, że ten
prosty obwód zerujący nie zawsze
zapewnia poprawne wyzerowanie,
gdy napięcie sieci zanika i pojawia
się kilkakrotnie, a przy awariach
czasem tak bywa. Brak zerowania
oznacza, że lampa może zostać za−
świecona po powrocie napięcia
sieci. Na reakcję układu ma wpływ
Projekty AVT
Rys. 1 Schemat ideowy pilota
Rys. 2 Schemat ideowy odbiornika
zdal ster najp.qxd 7/26/2004 12:52 PM Page 14
nie tylko pojawianie się i zanikanie napięcia,
ale też właściwości układu scalonego.
W praktyce nie jest to problemem: w ciągu
dwóch lat użytkowania ze trzy razy zdarzyło
mi się, że po zaniku i powrocie napięcia sie−
ci lampa została włączona. Nie warto zatem
szukać dziury w całym i rozbudowywać ob−
wodów zerujących.
Urządzenie odbiorcze pobiera bardzo ma−
ło prądu i jest zasilane z prostego zasilacza
beztransformatorowego D4, R4, R5, C4. Ty−
powy pobór prądu przez odbiornik
TFMS5360 wynosi 0,5mA (0,4...0,8mA),
a do tego dochodzi prąd płynący przez rezy−
stor R2 (mniej niż 25µA). Ponieważ napięcie
zasilania odbiornika TFMS powinno wyno−
sić 4,5...5,5V, a do skutecznego otwarcia
tranzystora polowego T2 wymagane jest na−
pięcie powyżej 6V, konieczne było dodanie
obwodu stabilizacji R1, D1. Zastosowane
rozwiązanie obwodu zasilania okazało się
skuteczne i całkowicie zadowalające, a dzię−
ki znikomemu poborowi prądu nie trzeba
było stosować typowego dla zasilaczy bez−
transformatorowych kondensatora szerego−
wego – wystarczają zwyczajne rezystory R4,
R5, w których w czasie pracy wydziela się
w sumie poniżej 0,1W mocy. Opisywany
układ odbiorczy pobiera z sieci w spoczynku
około 1mA prądu. Osiągnięcie tak małego
poboru prądu spowodowało, że zrezygnowa−
łem z pomysłu zastosowania w odbiorniku
kontrolki LED. Tak oszczędne rozwiązanie
jest możliwe dzięki zastosowaniu w roli ele−
mentu sterującego wysokonapięciowego
tranzystora MOSFET. Jest on sterowany na−
pięciowo, natomiast inne elementy wyko−
nawcze, np. przekaźniki, triaki i tyrystory
wymagają prądu sterującego powyżej 5mA.
Montaż i uruchomienie
Jak wspomniałem, pierwszy model powstał
szybko: nadajnik na płytce uniwersalnej,
a odbiornik w postaci zwartego pająka – patrz
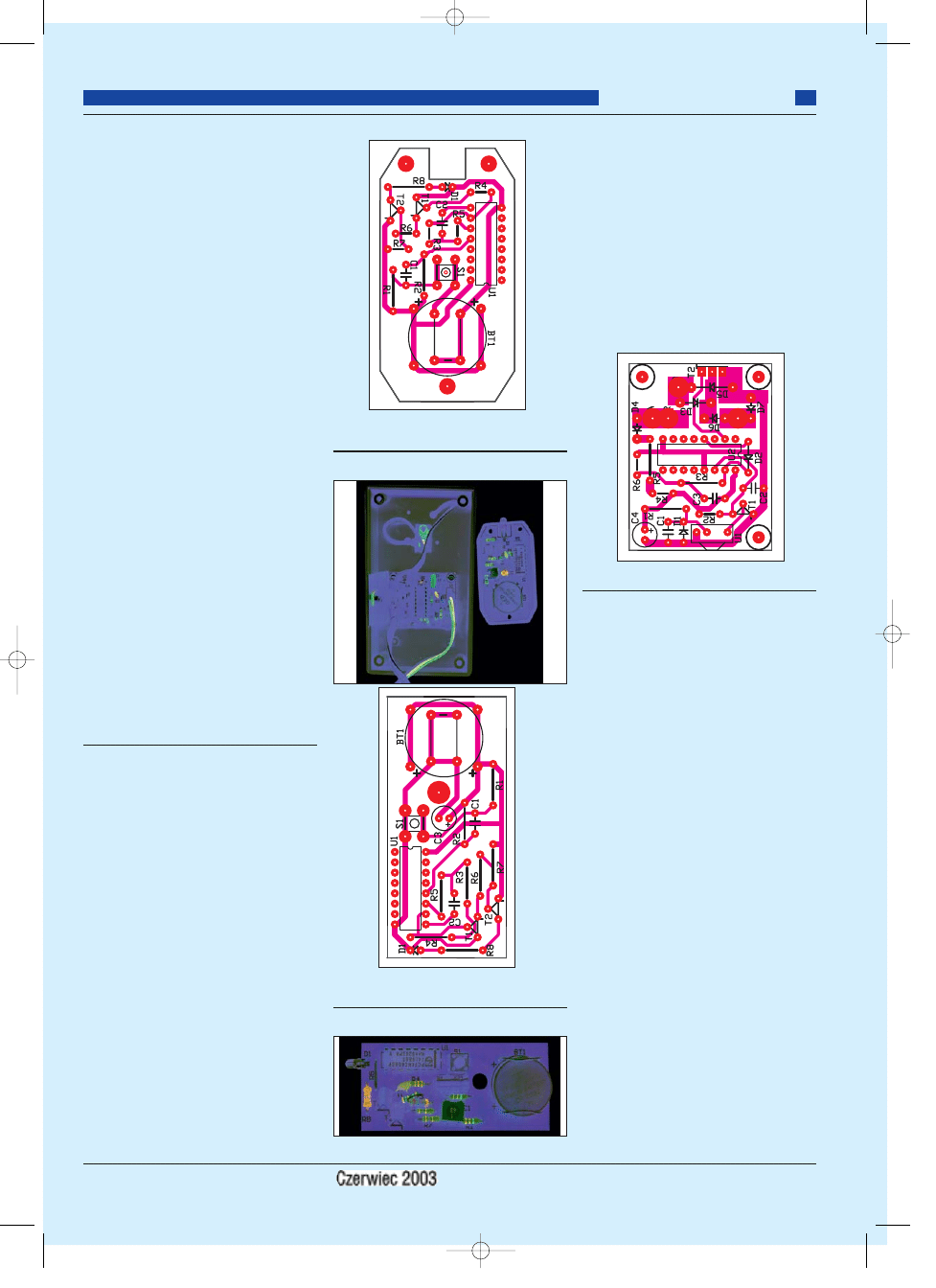
fotografie 1...4. Potem powstała płytka druko−
wana nadajnika według rysunku 3 przezna−
czona do obudowy KM−15N. Wykonany na
niej model nadajnika można zobaczyć na fo−
tografii 5. Obudowa KM−15N okazała się
jednak mało trwała (dwukrotnie wyłamała się
plastikowa membrana) i po pewnym czasie
powstała kolejna płytka przeznaczona do
obudowy KM−14. Płytka przeznaczona do ta−
kiej obudowy pokazana jest na rysunku 4.
Fotografia 6 pokazuje model zrealizowany
na wcześniejszej wersji płytki.
Układ odbiorczy można zmontować na
płytce pokazanej na rysunku 5. Płytka ta ma
otwory o rozstawie dostosowanym do obu−
dowy Z−27 (wtyczkowa duża).
Przed zmontowaniem odbiornika warto
zmontować i uruchomić nadajnik−pilot. Je−
dyną drobną trudnością jest tu konieczność
dobrania częstotliwości generatora U1. Po−
winna ona wynosić 36kHz. Rozrzuty warto−
ści elementów R (5%), C (10%) oraz progów
bramek generatora wymuszają konieczność
dobrania częstotliwości impulsów nadajni−
ka. Właśnie dlatego w układzie przewidzia−
no dwa rezystory R3, R4 połączone w sze−
reg. Procedura regulacji częstotliwości jest
opisana dalej i w związku z nią należy prze−
strzegać podanej dalej kolejności montażu.
Indywidualny dobór R4 jest absolutną
koniecznością. Posiadacze precyzyjnych
częstościomierzy poradzą sobie z zadaniem
w sposób oczywisty, podłączą tylko nóżkę 12
(CLR) do masy, żeby na stałe włączyć gene−
rator. Tu koniecznie muszę ostrzec właścicie−
li multimetrów cyfrowych z zakresem po−
miaru częstotliwości: ogromna większość ta−
kich przyrządów ma przy pomiarze częstotli−
wości zbyt małą dokładność! Zwykle często−
tliwość nie jest mierzona bezpośrednio, tylko
zamieniana w przetworniku F/U na napięcie
stałe i na wyświetlaczu pokazana jest ta war−
tość napięcia z przetwornika. Dokładność ta−
kiego pośredniego pomiaru częstotliwości
wynosi 3...5%, czyli jest absolutnie niewy−
starczająca dla omawianej sytuacji. Tak jest,
rozdzielczość 3,5−cyfrowego wskaźnika cy−
frowego wynosi wprawdzie 0,05%, ale do−
kładność tylko kilka procent! Tylko nieliczne
droższe multimetry mają obwody klasyczne−
go pomiaru rzeczywistej liczby impulsów
w dokładnie określonym odcinku czasu.
Krótko mówiąc, większość multimetrów cy−
frowych z funkcją pomiaru częstotliwości
zupełnie nie nadaje się do regulacji oscylato−
ra w nadajniku−pilocie. W każdym przypad−
ku dokładność posiadanego częstościomierza
należy sprawdzić w instrukcji obsługi.
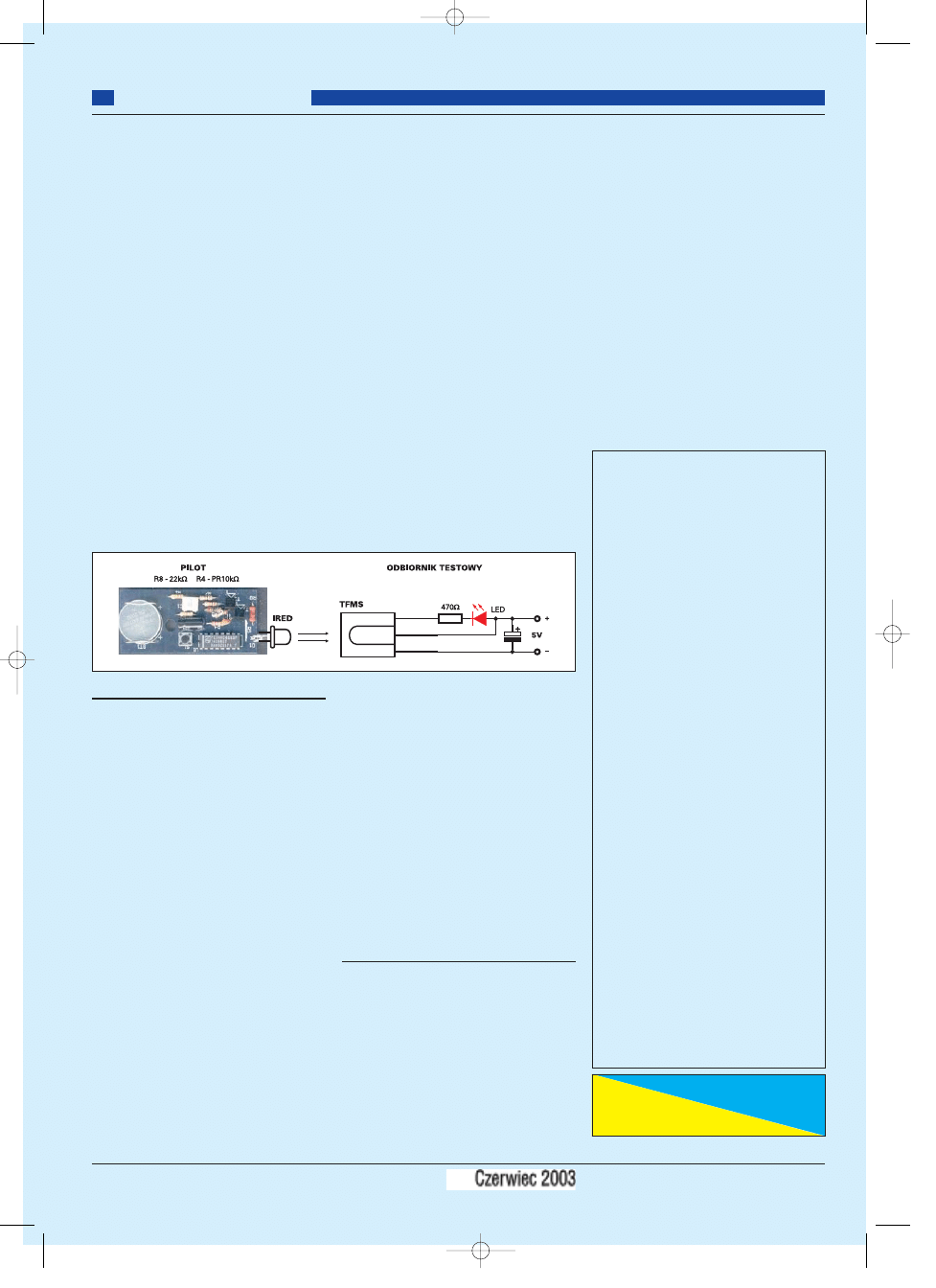
W związku z tym proponuję inny prosty
sposób, niewymagający użycia dokładnego
częstościomierza, a co najwyżej omomierza.
Mianowicie w roli wskaźnika częstotliwości
należy wykorzystać scalony odbiornik
TFMS5360 (SFH506−36), który później bę−
dzie pracował w urządzeniu odbiorczym.
W pilocie wstępnie zamiast rezystora R8
(100
Ω) należy prowizorycznie wlutować re−
zystor o wartości aż 22k
Ω (jest dodatkowy
w zestawie AVT−2667), co radykalnie
15
E l e k t r o n i k a d l a W s z y s t k i c h
Projekty AVT
Rys. 3 Schemat montażowy pilota
do obudowy KM 15M
Fot. 5
Rys. 4 Schemat montażowy pilota do
obudowy KM 14
Fot. 6
Rys. 5 Schemat montażowy odbiornika
zdal ster najp.qxd 7/26/2004 12:52 PM Page 15
zmniejszy zasięg łącza IRED. Zamiast R4
należy prowizorycznie, na jak najkrótszych
przewodach, zamontować potencjometr
montażowy 10k
Ω (też jest w zestawie AVT−
2667). Krótkie przewody są zalecane ze
względu na małą pojemność kondensatora
C2 w generatorze (470pF) – dodatkowe po−
jemności montażowe mogą znacząco zmie−
nić częstotliwość pracy.
Pilot powinien być zasilany napięciem
2,8...3,0V. Scalony odbiornik TFMS (SFH)
należy zasilić napięciem 5V i dołączyć do
wyjścia diodę LED i rezystor (też są dodat−
kowo w zestawie) według rysunku 6. W ta−
kim przypadku każde naciśnięcie przycisku
spowoduje wytworzenie paczki bardzo sła−
bych impulsów. Zasięg tak słabego łącza
wyniesie co najwyżej 10...20cm. I właśnie
aby ją osiągnąć, należy ustawić potrzebną
częstotliwość. Najpierw należy zbliżyć dio−
dę nadawczą do układu TFMS na odległość
0...1cm i sprawdzić, czy naciskanie przyci−
sku pilota powoduje zaświecanie diody LED
na wyjściu odbiornika. Jeśli tak, tor pracuje.
Należy oddalać pilot od odbiornika i pokrę−
cając potencjometrem montażowym, dobrać
częstotliwość, przy której zasięg jest naj−
większy. Potem trzeba wylutować potencjo−
metr, zmierzyć jego wartość i wlutować re−
zystor o najbliższej wartości. Ponieważ pro−
jekt nie jest przeznaczony dla zupełnie po−
czątkujących (dwie gwiazdki), w zestawie
nie przewidziano zestawu rezystorów do
wlutowania w miejsce R4. Odpowiedni re−
zystor należy wziąć z posiadanych zasobów.
Potem wypada jeszcze raz sprawdzić działa−
nie łącza (ze względu na wspomniane wcze−
śniej pojemności montażowe). Jeśli zasięg
się nie zmniejszył, na koniec trzeba wluto−
wać R8 o wartości 100
Ω i jeszcze raz osta−
tecznie sprawdzić zasięg łącza, który powi−
nien wynosić kilka metrów.
Płytkę można bez problemu umieścić
w obudowie KM−14, o ile tylko kondensator
filtrujący C3 ma średnicę 5mm. Przy kon−
densatorze o większej średnicy może być
kłopot z zamknięciem obudowy. W obu po−
łówkach obudowy należy też wcześniej wy−
ciąć szczeliny dla diody nadawczej IRED.
Do zasilania obowiązkowo ma być wyko−
rzystana bateria litowa o
oznaczeniu
CR2032 (20mm średnicy, 3,2mm wysoko−
ści). Nie powinny być wykorzystane cieńsze
baterie CR2025, a tym bardziej CR2016,
mające znacznie większą rezystancję we−
wnętrzną, a tym samym mniejszą wydajność
prądową.
Opisany właśnie dobór częstotliwości
pracy nadajnika nie jest wcale zadaniem
trudnym, a jedynie nieco pracochłonnym.
Na marginesie przypomnę, iż w układzie
z rysunku 6 nieprzerwany ciąg impulsów no−
śnych 36kHz (przy zwarciu wejścia CLR do
masy) nie spowoduje ciągłego świecenia
diody LED, a wynika to z właściwości
odbiornika TFMS/SFH. Opisany sposób
z odbiornikiem TFMS i diodą LED według
rysunku 6 okaże się też pomocny w przypad−
ku ewentualnych błędów, gdyby tor nie
chciał pracować.
Montaż układu odbiorczego na płytce
z rysunku 5 jest klasyczny. Odbiornik nie
wymaga żadnego uruchamiania i bezbłędnie
zmontowany ze sprawnych elementów od
razu powinien pracować.
Uwaga! W odbiorniku występują na−
pięcia sieci mogące być przyczyną śmier−
telnego porażenia. W żadnym wypadku
nie należy przeprowadzać jakichkolwiek
zmian w urządzeniu podłączonym do sie−
ci! W razie konieczności należy zasilać
układ odbiorczy napięciem 12...18V dołą−
czonym np. do kondensatora filtrującego C4.
Urządzenie odbiorcze przeznaczone jest
do sterowania obciążeniem rezystancyjnym
o mocy do 450W. Wynika to z maksymalne−
go prądu diod prostowniczych (razem 2A),
natomiast prąd maksymalny tranzystora
przekracza 5A przy temperaturze obudowy
+100
o
C. Przy mocy odbiornika do 200W do
tranzystora T2 nie jest potrzebny radiator.
Rezystancja otwartego tranzystora MOSFET
typu IRF840 wynosi maksymalnie 0,85
Ω,
więc przy prądzie 2A moc strat wyniesie po−
niżej 3,4W, co wymaga zastosowania maleń−
kiego radiatorka z kawałka blaszki o po−
wierzchni kilku centymetrów kwadratowych.
Dla dociekliwych
i zaawansowanych
Jak już pisałem, czas trwania paczki impul−
sów w pilocie wyznaczają elementy C1, R2.
Czas trwania „paczki” musi być na tyle dłu−
gi, żeby spowodować reakcję urządzenia
odbiorczego, a tam decyduje o tym stała cza−
sowa R2, C2. W systemie w wersji podsta−
wowej czas trwania „paczki” impulsów
nadawczych wynosi około 30ms, a urządze−
nie odbiorcze powinno reagować na „paczki”
o czasie trwania ponad 15ms. Daje to wystar−
czający margines bezpieczeństwa względem
sygnałów fabrycznych pilotów, których
„paczki” nie powinny być dłuższe niż 9ms.
W wersji podstawowej systemu przewidzia−
na jest częstotliwość pracy równa 36kHz. Je−
śli ktoś chce, może śmiało zastosować odbior−
niki TFMS/SFH o innej częstotliwości nomi−
nalnej, na przykład 30kHz (np. TFMS5300)
i zmienić stosownie częstotliwość generatora
w pilocie. Najprawdopodobniej 30−kiloher−
cowy odbiornik TFMS/SFH będzie reagował
na bezpośrednie sygnały pilotów o częstotli−
wości 36kHz, jednak nie powinien reagować
na ich sygnały odbite od ścian. W takim
przypadku można śmiało spróbować skrócić
czas impulsu w nadajniku, np. zmniejszając
pojemność C1 w pilocie do 10nF oraz pojem−
ność C2 w odbiorniku do 2,2nF, a potem
16
E l e k t r o n i k a d l a W s z y s t k i c h
Wykaz elementów
Nadajnik
Rezystory
R
R11,,R
R22 .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..333300kk
Ω
Ω
R
R33,,R
R55 .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..2222kk
Ω
Ω
R
R44 .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..** ddoobbiieerraannyy w
wee w
włłaassnnyym
m zzaakkrreessiiee
R
R66,,R
R77 .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..44,,77kk
Ω
Ω ((22,,22......1100kkΩ
Ω))
R
R88 .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..110000
Ω
Ω
Kondensatory
C
C11 .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..110000nnFF M
MK
KTT
C
C22 .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..447700ppFF cceerraam
miicczznnyy
C
C33 .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..110000µµFF//66,,33V
V ((oo śśrreeddnniiccyy 55m
mm
m))
Półprzewodniki
D
D11 .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..ddiiooddaa nnaaddaaw
wcczzaa IIR
REED
D 33m
mm
m
TT11,,TT22 .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..B
BC
C554488
U
U11 .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..7744H
HC
C44006600
Pozostałe
B
BTT11 .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..bbaatteerriiaa lliittoow
waa C
CR
R22003322
S
S11 .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..m
miikkrroossw
wiittcchh zz kkrróóttkkiim
m pprrzzyycciisskkiieem
m
O
Obbuuddoow
waa .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..K
KM
M−−1144
W
W sskkłłaadd kkiittuu A
AV
VTT−−22666677 ddooddaattkkoow
woo w
wcchhooddzząą eelleem
meennttyy::
rreezzyyssttoorr 2222kk
Ω
Ω
rreezzyyssttoorr 447700
Ω
Ω
ppootteennccjjoom
meettrr m
moonntt.. m
miinnii 1100kk
Ω
Ω
ddiiooddaa LLEED
D 33m
mm
m cczzeerrw
woonnaa
Odbiornik
Rezystory
R
R11 .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..99,,11kk
Ω
Ω
R
R22 .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..668800kk
Ω
Ω
R
R33 .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..110000kk
Ω
Ω
R
R44,,R
R55 .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..4477kk
Ω
Ω
R
R66 .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..11M
M
Ω
Ω
Kondensatory
C
C11,,C
C33 .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..110000nnFF cceerraam
miicczznnyy
C
C22 .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..2222nnFF M
MK
KTT
C
C44 .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..110000µµFF//2255V
V
Półprzewodniki
D
D11 .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..ZZeenneerraa C
C55V
V11
D
D22 .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..11N
N44114488
D
D33−−D
D77 .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..11N
N44000077
TT11 .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..B
BC
C554488
TT22 .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..IIR
RFF884400
U
U11 .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..TTFFM
MS
S553300 lluubb S
SFFH
H550066−−3366
U
U22 .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..C
CM
MO
OS
S 44001177
Projekty AVT
Rys. 6
Komplet podzespołów z płytką
jest dostępny w sieci handlowej AVT
jako kit szkolny AVT−2667
zdal ster najp.qxd 7/26/2004 12:52 PM Page 16
17
E l e k t r o n i k a d l a W s z y s t k i c h
sprawdzić, z jakiej odległości taki 30−kilo−
hercowy odbiornik reaguje na sygnały fa−
brycznych pilotów. Jeszcze bardziej zmniej−
szy to pobór prądu i zapewni nawet kilkulet−
nią pracę jednej jedynej baterii w pilocie.
Warto też wiedzieć więcej o właściwo−
ściach generatora w pilocie. Podana wcze−
śniej procedura doboru częstotliwości genera−
tora pilota zapewni dobre wyniki, bo pozwala
sprawdzić zasięg we współpracy z konkret−
nym egzemplarzem odbiornika TFMS.
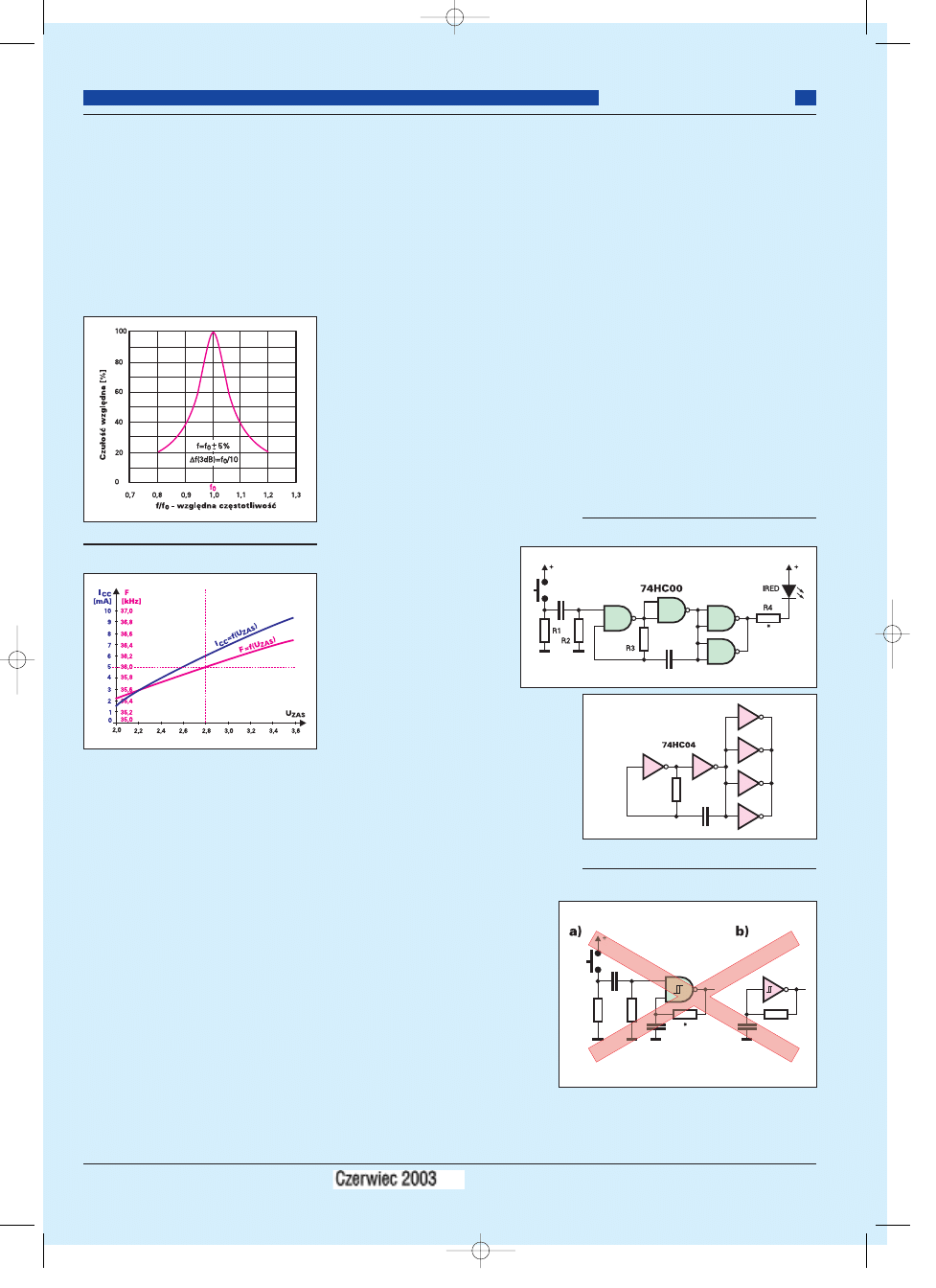
Rysunek 7 pokazuje wpływ czułości
odbiornika TFMS w zależności od częstotli−
wości impulsów „nośnych” w temperaturze
+25
o
C. Wynika z niego, że częstotliwość im−
pulsów nie powinna różnić się od nominalnej
o więcej niż 5% − czułość maleje wtedy
o około 3dB. Dla bezpieczeństwa należałoby
jeszcze bardziej zawęzić zakres dopuszczal−
nych zmian częstotliwości nadajnika – do
±2%. Tolerancja ±2% od 36kHz to zakres
35,28...36,72kHz. Stabilność termiczna kla−
sycznego generatora dwubramkowego (tak
zbudowany jest oscylator kostki 4060) jest
wystarczająca, a spodziewane zmiany czę−
stotliwości w temperaturach pokojowych nie
przekroczą ±1%.
W ramach testów ostatniego modelu
zmierzyłem zależność częstotliwości genera−
tora pilota oraz pobór prądu w funkcji napię−
cia zasilania. Wyniki przedstawione są na ry−
sunku 8. Szczerze mówiąc, przed pomiarem
starannie dobrałem częstotliwość generatora,
by przy napięciu zasilania 2,8V wynosiła do−
kładnie 36kHz. Wartość napięcia 2,8V nie
jest przypadkowa. Napięcie świeżej baterii li−
towej wynosi nieco ponad 3,3V, jednak na−
wet przy świeżej baterii napięcie podczas
pracy nieco się obniża. Tym bardziej obniża
się, jeśli bateria jest częściowo wyładowana.
Jeśli ktoś będzie chciał dobrać częstotliwość
generatora wyjątkowo precyzyjnie, powinien
uczynić to przy napięciu zasilania 2,8V.
Rysunek 8 pokazuje, z jakimi odchyłkami
trzeba się liczyć. Jak widać, stałość częstotli−
wości tego prostego generatora RC jest w su−
mie bardzo dobra i z powodzeniem mieści się
w przyjętych dość wąskich granicach. Mniej
optymistyczne są wyniki dotyczące poboru
prądu, który praktycznie równa się średnie−
mu prądowi diody nadawczej IRED (prąd
szczytowy jest około dwukrotnie większy).
Przy spadku napięcia zasilania prąd dość
szybko maleje, a tym samym zmniejszać się
będzie zasięg łącza. Właśnie ze względu na
wydajność baterii wartość rezystora ograni−
czającego R8 wynosi 100
Ω, co jak na piloty
jest wartością bardzo dużą, ograniczającą
prąd w impulsie do kilkunastu miliamperów.
Taki prąd z powodzeniem zapewni zasięg po−
nad dwóch metrów, co dla mojego zastoso−
wania jest wartością całkowicie wystarczają−
cą. Przy okazji mniejsza moc pi−
lota i wymagana kierunkowość
umożliwiają współpracę w jed−
nym pomieszczeniu kilku urzą−
dzeń odbiorczych. Dlatego ja
w pełni świadomie zdecydowa−
łem się na takie rozwiązanie. Jeśli
jednak ktoś chce uzyskać więk−
szy zasięg, może zmniejszyć war−
tość R8 w pilocie nawet stukrot−
nie(!), by otrzymać w impulsie
prąd rzędu 1A, a nawet więcej. W takich
przypadkach trzeba, po pierwsze zajrzeć do
karty katalogowej diody nadawczej IRED
i sprawdzić dopuszczalny prąd impulsowy
(często do 2A) i dopuszczalną moc strat
w przyjętych warunkach pracy. Druga spra−
wa to pobór prądu. Małe baterie litowe, na−
wet stosunkowo wydajna CR2032, nie są
w stanie dostarczyć prądu większego niż kil−
kanaście miliamperów. Oznacza to, że
zmniejszając wartość R8, należy obowiązko−
wo zapewnić odpowiednią wydajność
prądową źródła zasilania. Można to zro−
bić, dodając kondensator elektrolityczny
o dużej pojemności Wtedy podczas pra−
cy pilota źródłem zasilania będzie ten
kondensator, a nie mała bateria. Jeśli
przykładowo średni pobór prądu wynie−
sie 0,5A przez czas 20ms, to wymagana
pojemność wynosiłaby ponad 4700µF.
Zadanie o tyle nie jest łatwe, że w małej
obudowie należałoby zmieścić konden−
sator o pojemności ponad 4700µF. Bar−
dziej praktycznym rozwiązaniem będzie
wykorzystanie baterii o dużej wydajno−
ści i większej obudowy. Mogą to być po−
pularne „paluszki” R6 (AA) lub „małe palu−
szki” R03 (AAA), najlepiej oczywiście alka−
liczne. Do tego też kondensator magazynują−
cy o możliwie dużej pojemności, np.
470µF...2200µF.
Jak wspomniałem, w pilocie zastosowa−
łem układ 74HC4060, bo taki miałem pod
ręką. Wszystko wskazuje, że nadajnik moż−
na uprościć według idei z rysunku 9. Lojal−
nie przyznaję, że nie sprawdzałem takiego
układu. Spodziewam się, że R4 nie będzie
potrzebny i można go zastąpić zworą. Jeśli
natomiast prąd diody IRED byłby za mały,
można spróbować wykorzystać w roli stop−
nia mocy cztery inwertery kostki 74HC04
według idei z rysunku 10, ale trzeba dodać
bardziej rozbudowany obwód sterowania, by
w spoczynku układ nie pobierał prądu. Ze
względu na wymaganą stabilność częstotli−
wości zdecydowanie do nadajnika nie nada−
je się prosty układ generatora z jedną „bram−
ką Schmitta” – dlatego rysunek 11 jest prze−
kreślony. Nie spełni on przewidzianej roli ze
względu na znaczne wahania napięcia zasi−
lającego, które z kolei ma duży wpływ na
częstotliwość.
Piotr Górecki
Zbigniew Orłowski
Projekty AVT
Rys. 7
Rys. 8
Rys. 10
Rys. 11
Rys. 9
zdal ster najp.qxd 7/26/2004 12:52 PM Page 17
Wyszukiwarka
Podobne podstrony:
Stefanowski- Układ zdalnego sterowania i zabezpieczeń, Akademia Morska -materiały mechaniczne, szkoł
Zdalne sterowanie podczerwienią, Zdalne sterowanie podczerwienią
Zdalne sterowanie podczerwienią, Zdalne sterowanie podczerwienią
1996 12 Zdalne sterowanie przez telefon, część 2
2400 Nietypowe zdalne sterowanie
Programowanie pilotów zdalnego sterowania(1)
Układ zdalnego sterowania typu ZSPE, 1
2001 04 Czterokanałowe zdalne sterowanie
1999 12 Nietypowe zdalne sterowanie
Nadajnik i odbiornik do urządzeń zdalnego sterowania SL490, ML929 927
Układ zdalnego sterowania i zabezpieczeń ZSPB, Instrukcje
Dopasowywanie pilotów zdalnego sterowania
2400 Nietypowe zdalne sterowanie 2
Monitoring i zdalne sterowanie instalacjami KNX za pośrednictwem Internetu
Przedłużacz zdalnego sterowania
więcej podobnych podstron