AKADEMIA TECHNICZNO-HUMANISTYCZNA
W BIELSKU-BIAŁEJ
KATEDRA PODSTAW BUDOWY MASZYN
Instrukcje laboratoryjne
Charakterystyki statyczne i skokowe regulatorów pneumatycznych
6. Charakterystyki statyczne i skokowe regulatorów pneumatycznych
Cel wiczenia:
Celem wiczenia jest poznanie własno ci statycznych i dynamicznych typowych regulatorów
ci głych na przykładzie regulatorów pneumatycznych produkcji PAP Falenica. W trakcie
zaj przewiduje si badanie własno ci statycznych i dynamicznych regulatora
proporcjonalnego P, oraz dynamicznych regulatorów: proporcjonalno-całkuj cego PI,
proporcjonalno-ró niczkuj cego PD i proporcjonalno-całkuj co-ró niczkuj cego PID.
Wst p
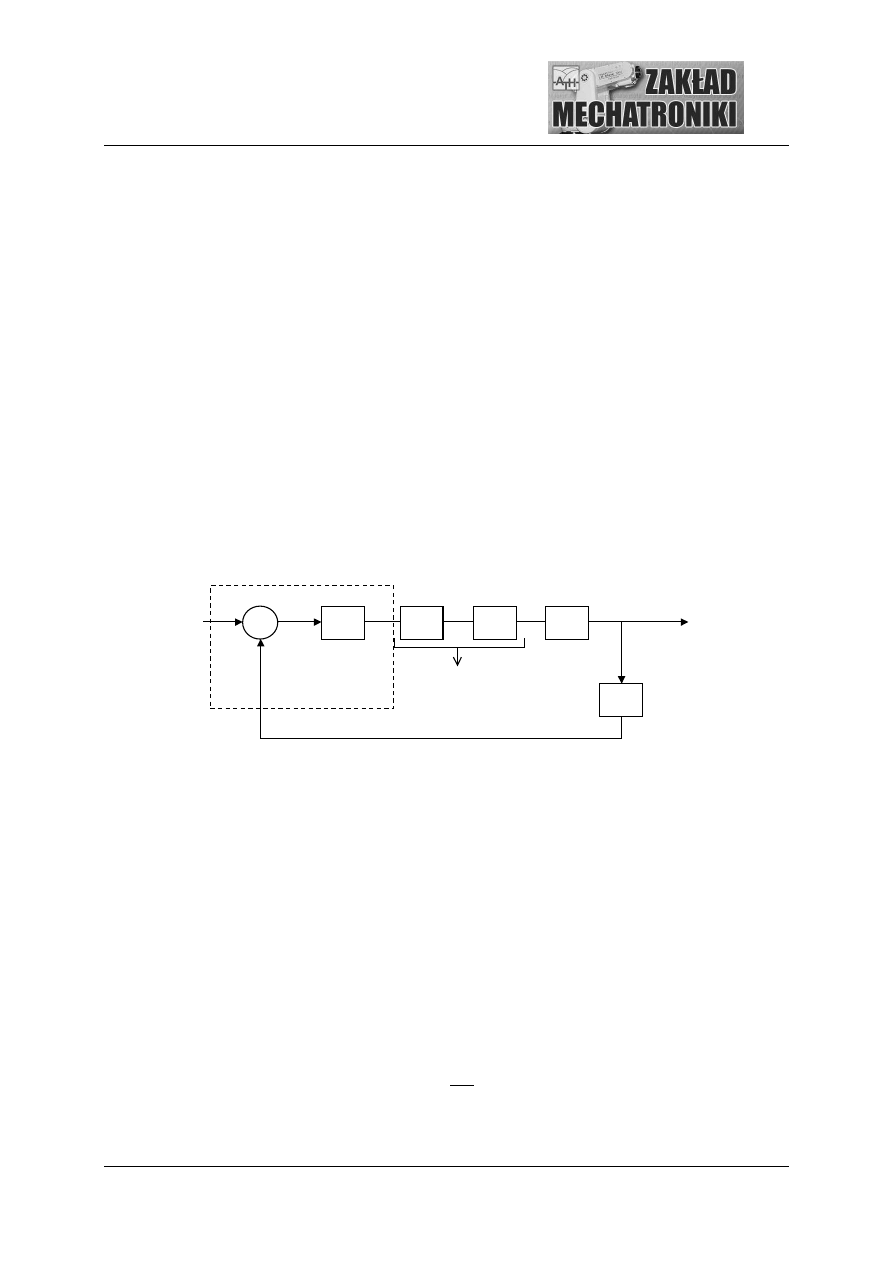
Powszechne zastosowanie regulacji automatycznej w przemy le przyczyniło si do
powstania systemów blokowych. Pozwalaj one na tworzenie dowolnych prostych
i zło onych układów regulacji automatycznej poprzez dobór typowych elementów [3]
(rys.6.1).
Zastosowanie
typowych
elementów
pozwala
na
unifikacj
sygnałów
po rednicz cych. Na przykład w pneumatycznym systemie blokowym PNEFAL zakres
sygnałów wynosi 20-100 [kPa], a ci nienie zasilania 140 [kPa].
R
S
N
O
PP
w + e
-
-
UW
y
Rys.6.1. Schemat blokowy układu regulacji: y – sygnał regulowany, w – sygnał zadaj cy, R – regulator,
UW- urz dzenie wykonawcze, N – nastawnik, S – siłownik, O – obiekt regulacji, PP – przetwornik pomiarowy.
Ze wzgl du na własno ci dynamiczne regulatory ci głe dzieli si na:
1. proporcjonalne P;
2. całkuj ce I;
3. proporcjonalno-całkuj ce PI;
4. proporcjonalno-ró niczkuj ce PD;
5. proporcjonalno-całkuj co-ró niczkuj ce PID;
Współczynnik wzmocnienia proporcjonalnego k
p
jest to iloraz przyrostu składowej
proporcjonalnej wielko ci wyj ciowej regulatora
∆
u do przyrostu odchyłki regulacji
∆
e.
Współczynnik ten mo na równie wyrazi przez zakres proporcjonalno ci X
p
, który jest
odwrotno ci współczynnika wzmocnienia.
e
u
k
p
∆
∆
=
,
p
u
AKADEMIA TECHNICZNO-HUMANISTYCZNA
W BIELSKU-BIAŁEJ
KATEDRA PODSTAW BUDOWY MASZYN
Instrukcje laboratoryjne
Charakterystyki statyczne i skokowe regulatorów pneumatycznych
Zakres proporcjonalno ci informuje jaki procent zmian sygnału wej ciowego
powoduje pełna zmian sygnału wyj ciowego.
%
100
1
⋅
=
p
p
k
X
Czas zdwojenia T
i
to czas, po którym składowa całkowa wielko ci wyj ciowej
regulatora PI, odpowiedzi na wymuszenie skokowe, przewy sza składow proporcjonaln tej
odpowiedzi (tab.1).
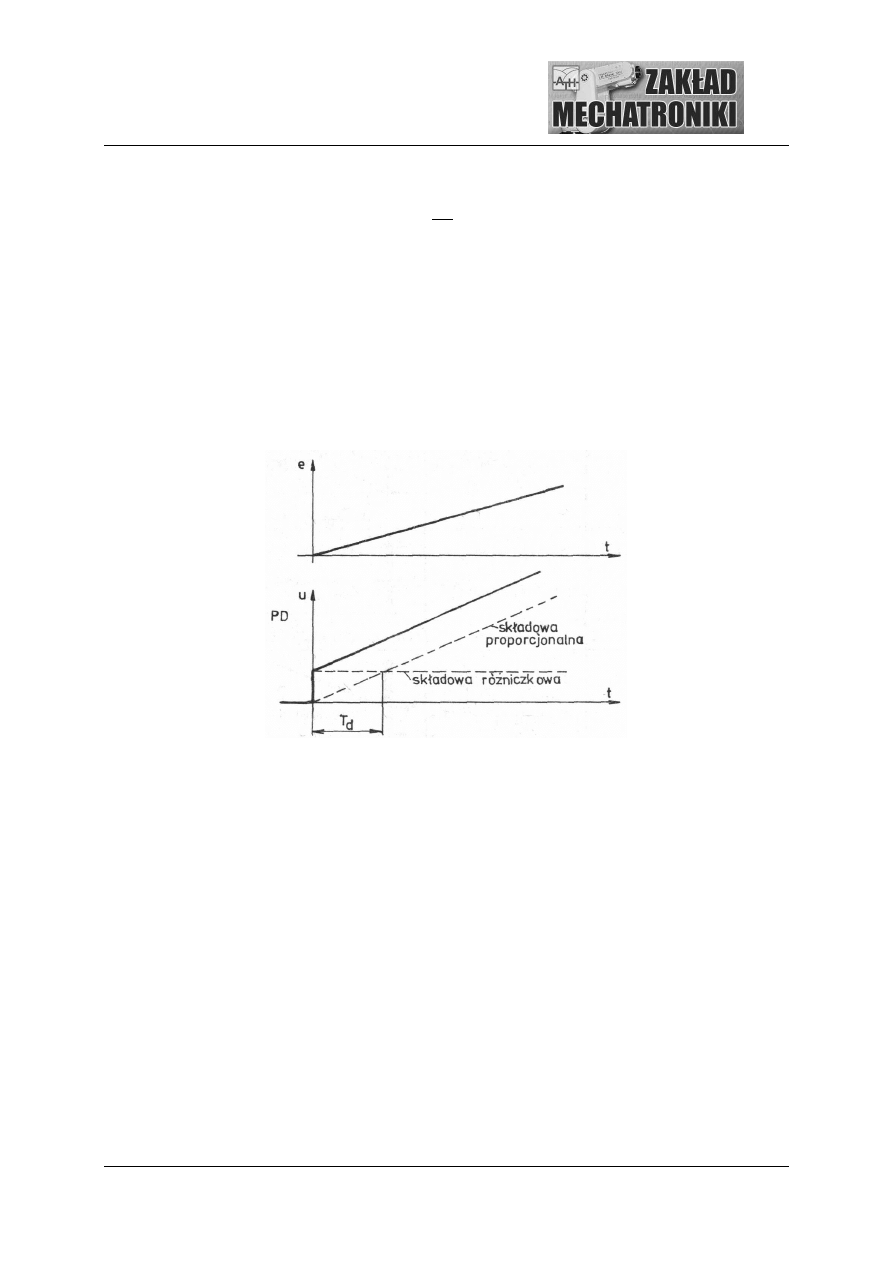
Czas wyprzedzenia T
d
to czas, po którym składowa proporcjonalna wielko ci
wyj ciowej regulatora PD, b d cej odpowiedzi na wymuszenie liniowo narastaj ce w czasie,
przewy sza składow ró niczkow tej odpowiedzi. Na rys. 6.2 przedstawiono sposób
wyznaczenia czasu wyprzedzenia na podstawie zarejestrowanej odpowiedzi regulatora PD na
wymuszenie liniowo narastaj ce.
Rys. 6.2. Charakterystyka liniowo narastaj ca regulatora PD
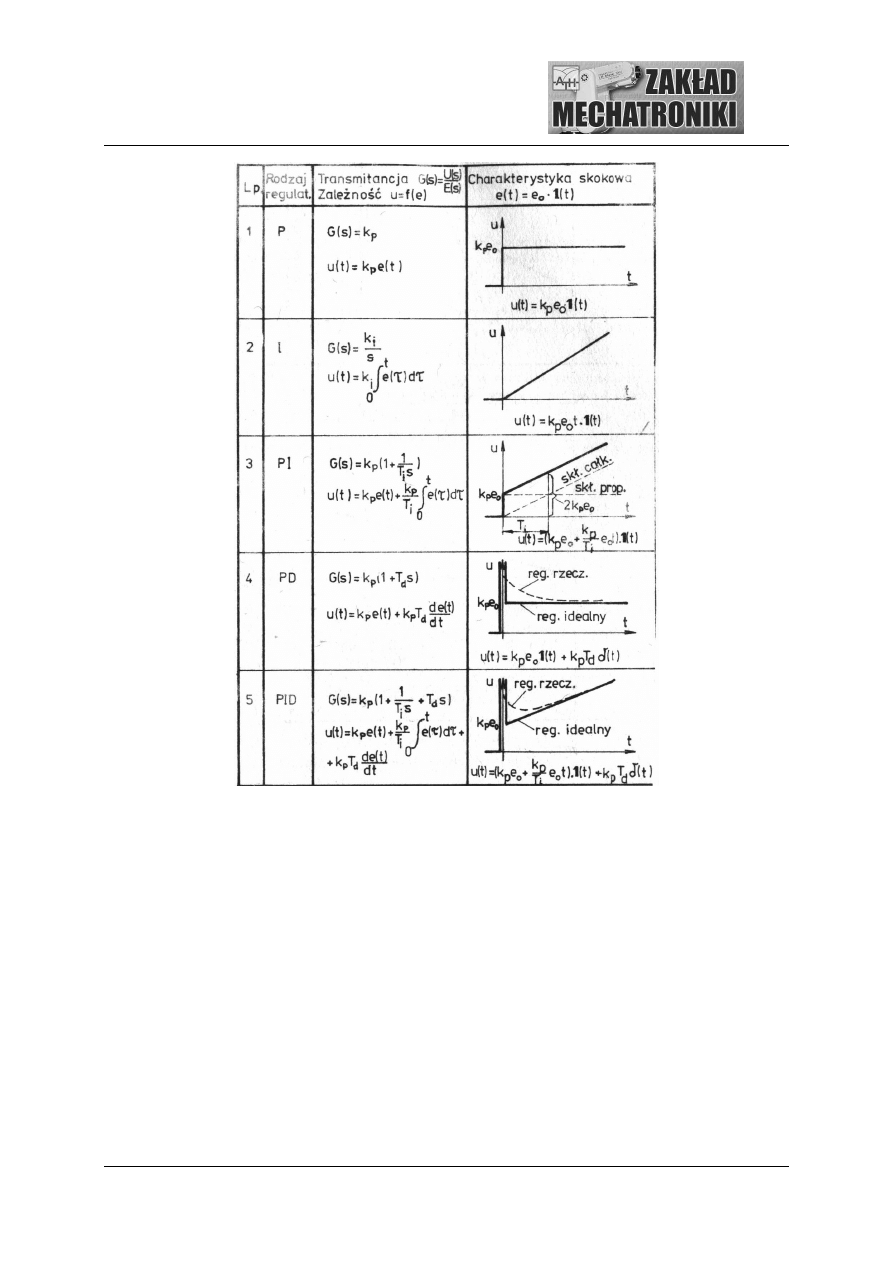
W tabeli 1. przedstawiono transmitancje oraz charakterystyki skokowe regulatorów ci głych
[1].
AKADEMIA TECHNICZNO-HUMANISTYCZNA
W BIELSKU-BIAŁEJ
KATEDRA PODSTAW BUDOWY MASZYN
Instrukcje laboratoryjne
Charakterystyki statyczne i skokowe regulatorów pneumatycznych
Tab.1. Transmitancje regulatorów ci głych [1]
Przebieg wiczenia
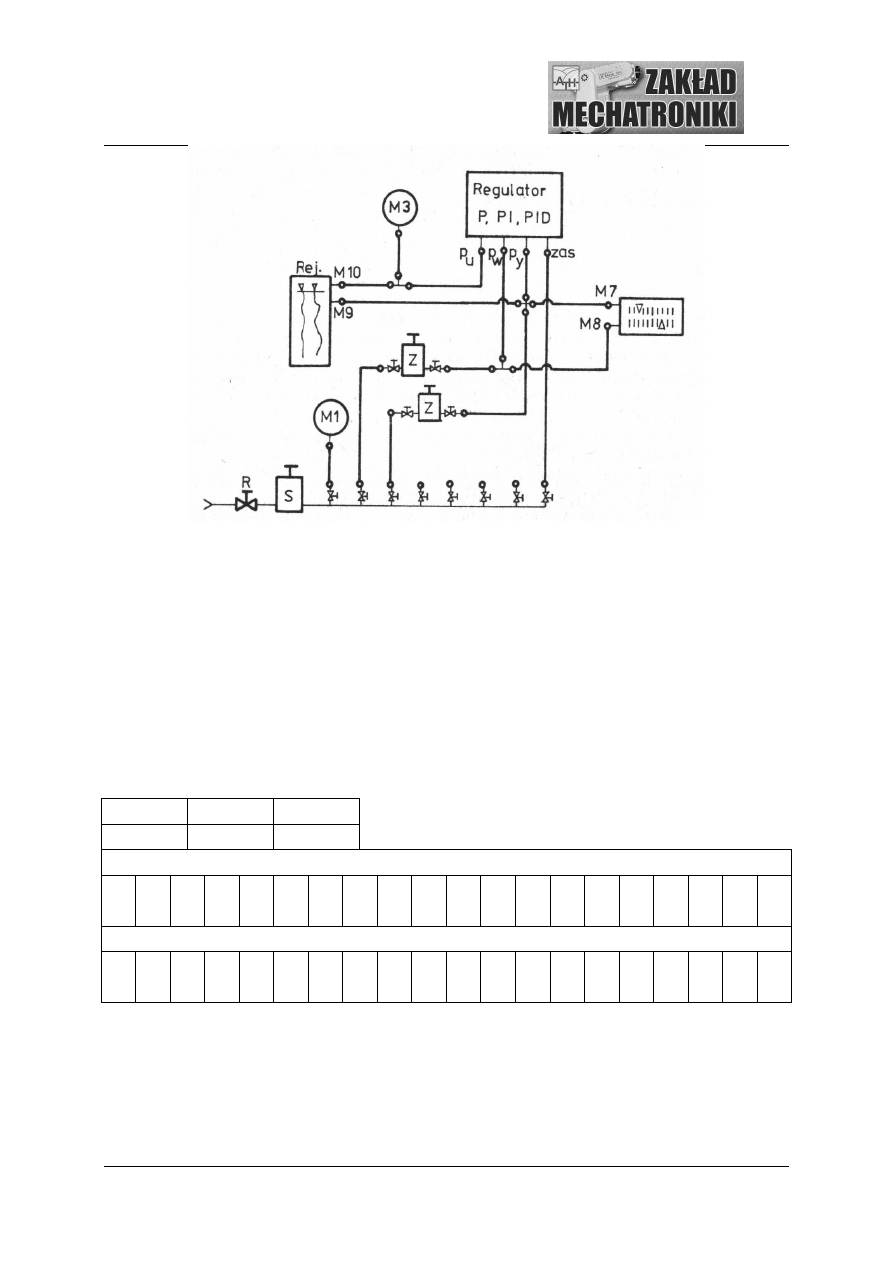
Zmontowa układ pomiarowy zgodnie ze schematem przedstawionym na rys 6.3.
Układ pomiarowy jest identyczny dla wszystkich regulatorów.
AKADEMIA TECHNICZNO-HUMANISTYCZNA
W BIELSKU-BIAŁEJ
KATEDRA PODSTAW BUDOWY MASZYN
Instrukcje laboratoryjne
Charakterystyki statyczne i skokowe regulatorów pneumatycznych
Rys. 6.3. Schemat układu pomiarowego do badania charakterystyk statycznych i skokowych regulatorów. R –
zawór odcinaj cy, S – stabilizator ci nienia, Z – zadajnik cisnienia, Rej. – rejestrator, M1 – M10 – manometry
Regulator P.
Wykona pomiary charakterystyk statycznych
( )
e
u
p
f
p
=
,
gdzie:
y
w
e
p
p
p
−
=
,
p
e
– ci nienie uchybu regulacji;
p
w
– warto zadana ci nienia (M7 rys.2);
p
y
– warto regulowana (M8 rys. 2),
dla podanych przez prowadz cego warto ci X
p
=const, p
p
=const, p
w
=const. Wyniki nale y
zestawi w tabeli 6.2.
Tab. 6.2.
X
p
[%]
p
p
[kPa]
p
w
[%]
p
e
[%]
p
u
[kPa]
Wł czy mierniki rejestratora. Sporz dzi charakterystyki skokowe regulatora, wprowadzaj c
skokowe zakłócenie poprzez szybki obrót pokr tła zadajnika warto ci regulowanej ci nienia.
Wył czy zapis rejestratora. Charakterystyki wykona dla wskazanych przez prowadz cego
warto ci X
p
=const, p
p
=const.
AKADEMIA TECHNICZNO-HUMANISTYCZNA
W BIELSKU-BIAŁEJ
KATEDRA PODSTAW BUDOWY MASZYN
Instrukcje laboratoryjne
Charakterystyki statyczne i skokowe regulatorów pneumatycznych
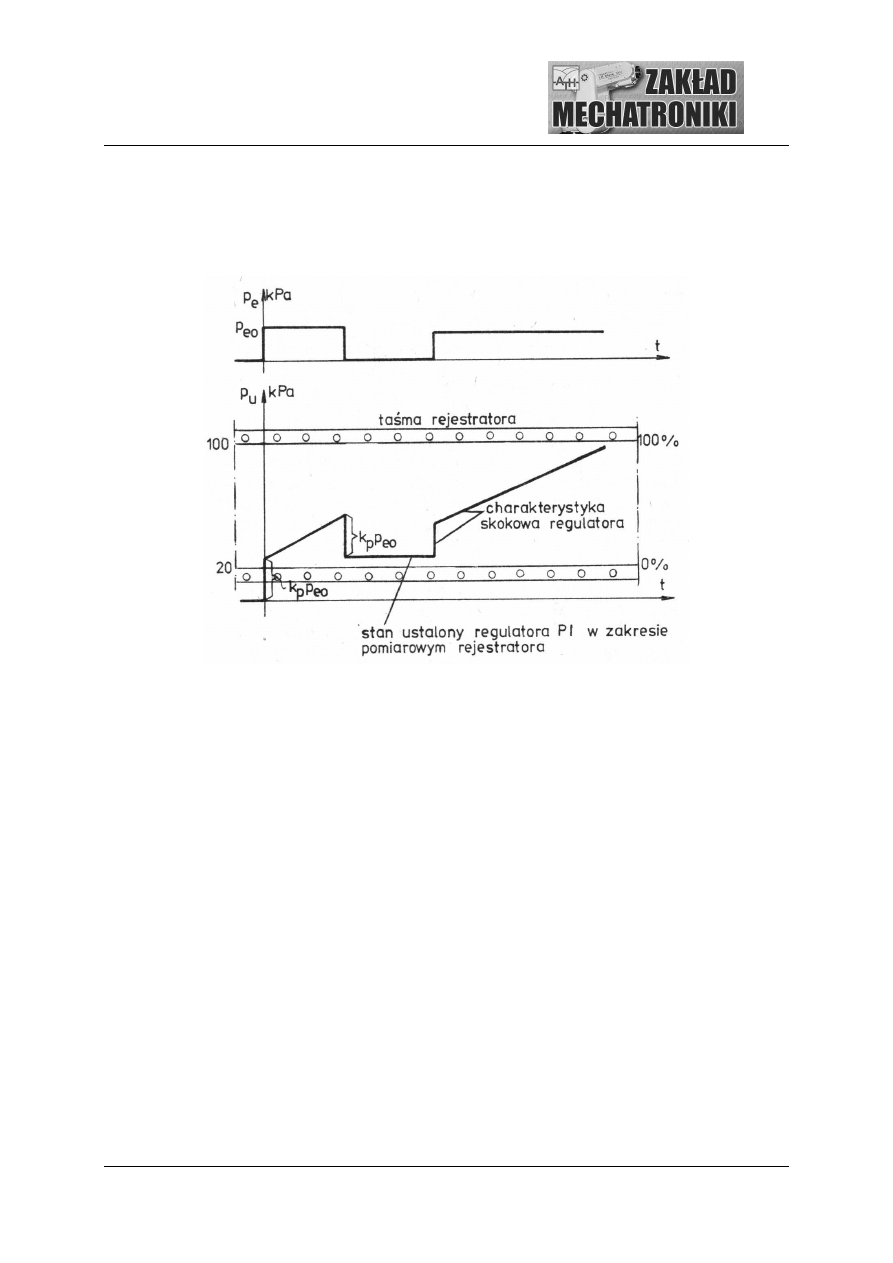
Regulator PI
Poł czy regulator PI z układem pomiarowym zgodnie z rys. 6.3. Wykona
charakterystyki skokowe przy wskazanych przez prowadz cego nastawach regulatora. Ka d
charakterystyk skokow mierzy od stanu ustalonego
0
=
=
−
e
y
w
p
p
p
. Sposób zmiany
warto ci ustalonego sygnału wyj ciowego regulatora PI przedstawiono na rys. 3.
Rys. 6.4. Sposób uzyskania ustalonego sygnału wyj ciowego regulatora PI w zakresie pomiarowym rejestratora
Regulator PD
Poł czy regulator PD z układem pomiarowym zgodnie z rys. 6.3. Wykona
charakterystyki skokowe przy wskazanych przez prowadz cego nastawach regulatora X
p
, p
p
,
T
i
.
Regulator PID
Poł czy regulator PID z układem pomiarowym zgodnie z rys. 6.3. Wykona
charakterystyki skokowe przy wskazanych przez prowadz cego nastawach regulatora X
p
, T
i
,
T
d
. Ka d charakterystyk skokow mierzy od stanu ustalonego
0
=
=
−
e
y
w
p
p
p
. Sposób
zmiany warto ci ustalonego sygnału wyj ciowego regulatora PID nale y wykona podobnie
jak w przypadku PI (rys.6.4). Nastawy regulatora powinny by tak dobrane, aby spełniły
warunek T
i
>4T
d
ze wzgl du na zjawisko interakcji [1], [3].
Uwagi o sprawozdaniu
•
Wykre li charakterystyki statyczne regulatora P na jednym wykresie.
•
Okre li rzeczywisty zakres proporcjonalno ci regulatora oraz punkt pracy i porówna
z nastawionymi.

AKADEMIA TECHNICZNO-HUMANISTYCZNA
W BIELSKU-BIAŁEJ
KATEDRA PODSTAW BUDOWY MASZYN
Instrukcje laboratoryjne
Charakterystyki statyczne i skokowe regulatorów pneumatycznych
•
Na podstawie charakterystyk skokowych regulatorów P, PI, PID wyznaczy
rzeczywiste parametry X
p
, T
i
, T
d
i porówna je z nastawionymi.
•
Wnioski i spostrze enia.
Literatura
[1]. Maczy ski K., Kłosi ski J., Piko S., Suwaj S.: Podstawy automatyki w przykładach i
wiczeniach laboratoryjnych. Skrypty dla szkół wy szych. Politechnika Łódzka, Łód
1989.
[2]. Awrajcewicz J., Wodzicki W.: Podstawy automatyki. Teoria i przykłady. Łód , 2001.
[3]. Bogumił T.: Elementy urz dze automatyki. PWSZ 1972.
Wyszukiwarka
Podobne podstrony:
więcej podobnych podstron