
1
Politechnika Warszawska
Wydział Samochodów i Maszyn Roboczych
Instytut Maszyn Roboczych Ciężkich
Laboratorium Dźwignic
Ćwiczenie D3
Obciążenia dźwignic.
Siły dynamiczne podnoszenia.
Wersja robocza
Tylko do użytku wewnętrznego SiMR PW
Opracowanie:
Dr inż. Artur Jankowiak
Warszawa 2010
Wszelkie prawa zastrzeżone

2
1. CEL ĆWICZENIA
Celem ćwiczenia jest zapoznanie studentów z zagadnieniami obciążeń dźwignic
związanych z pracą mechanizmów podnoszenia. W ćwiczeniu studenci dokonują
oceny sił dynamicznych na bazie teoretycznej i zaleceń norm branżowych oraz
weryfikują uzyskane wartości poprzez pomiary sił w mechanizmie podnoszenia
suwnicy bramowej.
2. WPROWADZENIE
Podczas pracy urządzeń dźwignicowych na mechanizmy podnoszenia i tym samym na
konstrukcję nośną dźwignicy oprócz podstawowych obciążeń (siła ciężkości ładunku oraz
elementów własnych) pojawiają się obciążenia (siły) dynamiczne. Powoduje to sprężystość
każdego ustroju nośnego oraz cięgnowego (każda zmiana obciążenia wywołuje drgania). Siły
dynamiczne przy podnoszeniu / opuszczaniu ładunku mają kierunek pionowy i występują
przede wszystkim w przypadkach:
•
podnoszenia ładunku z podłoża przy linach wstępnie napiętych,
•
podnoszenia ładunku z podłoża przy linach bez napięcia wstępnego,
•
rozpoczęcie podnoszenia / opuszczania ładunku wiszącego już na linach,
•
hamowania ruchu przy podnoszeniu / opuszczaniu ładunku.
Największe siły dynamiczne pojawiają się w przypadku podnoszenia ładunku z podłoża
przy luźnych cięgnach – przypadek ten nazywany jest poderwaniem ładunku.
W celu analitycznego wyznaczenia obciążeń dynamicznych (w niniejszym przypadku
chodzi głównie o oddziaływanie podnoszonych mas na ustrój nośny), niezbędne jest
przyjęcie odpowiedniego modelu i co się z tym wiąże wyznaczenie mas (rzeczywistych i
zastępczych) oraz sztywności więzi sprężystych. W praktyce przyjmuje się modele jedno,
dwu lub trójmasowe oraz redukuje się wszystkie masy układu rzeczywistego do
najdogodniejszych punktów. Należy przy tym pamiętać, że sztywność konstrukcji nośnej jest
ściśle związana z miejscem przyłożenia obciążenia. Z tego tytułu do obliczeń modelowych
przyjmuje się sztywności układu odpowiadające punktom redukcji mas.
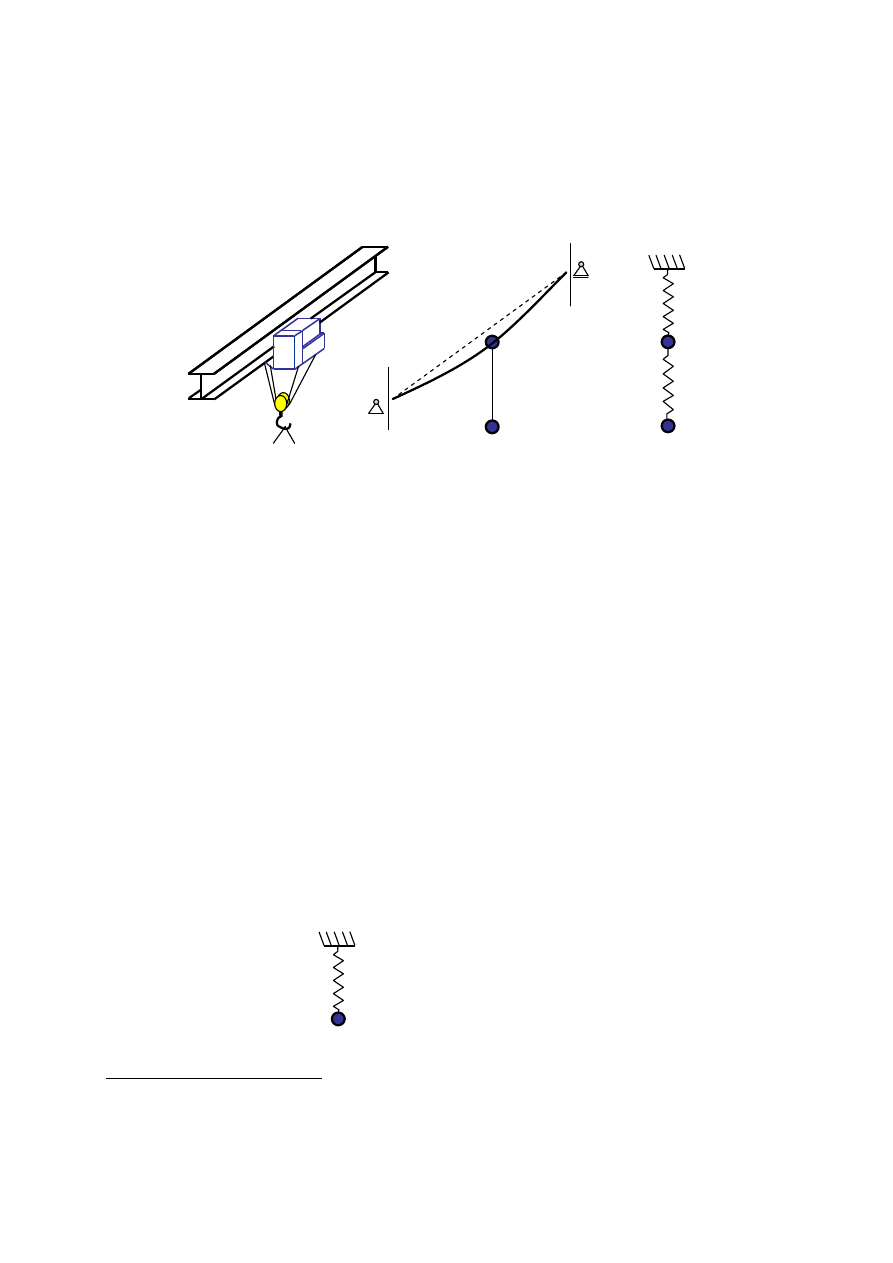
Model dynamiczny suwnicy
Doświadczenie wskazuje, że do opisu oddziaływania podnoszonego ciężaru na ustrój
nośny (z zadowalającą dokładnością) można zastąpić rzeczywisty - złożony, wielomasowy
układ, odpowiednio dobranym modelem jednomasowym.
W przypadku suwnic pomostowych i bramowych mamy następujące elementy
charakterystyczne (rys. 1a): konstrukcja nośna o masie zredukowanej m
KN
i sztywności k
KN
,
wciągarka lub wciągnik o masie m
W
, cięgna nośne o sztywności k
l
(masę cięgien w tej
analizie można pominąć), zblocze o masie (m
Z
) oraz podnoszony ładunek o masie (m
Ł
).
Ze względu na charakter pracy tych urządzeń, można założyć, iż punkt przyłożenia
obciążenia od podnoszonej masy pokrywa się ze środkiem masy wciągnika. Wraz z
zazwyczaj sztywnym powiązaniem wciągnika z dźwigarem pozwala to na traktowanie
zredukowanej masy konstrukcji nośnej oraz masy wciągnika łącznie - jako masę układu
podtrzymującego (m
UP
) (rys. 1b).
W
KN
UP
m
m
m
+
=
(1)
3
m
k
KN
Podobnie, razem można potraktować masę ładunku oraz masę zblocza i traktować jako
masę obciążenia m
Q
(rys. 1b).
Ł
Z
Q
m
m
m
+
=
(2)
W efekcie uzyskuje się model dwumasowy układu rzeczywistego (rys. 1c). W zależności
od typu konstrukcji nośnej suwnicy różna będzie sztywność k
KN
.
Rys.1. – Model dynamiczny suwnicy: a) elementy i masy charakterystyczne, b) model
dwumasowy - schemat układu, c) zastępczy model dwumasowy
Dla suwnic pomostowych przyjmuje się, że dźwigar suwnicy - poprzez sztywny zespół
czołownic i zestawy kołowe - podparty jest podobnie jak belka z jedną podporą stałą a drugą
przesuwną. Dla suwnic bramowych, w których dźwigary są zazwyczaj sztywno związane ze
słupami, takie założenie byłoby nadmiernym uproszczeniem. W tej sytuacji wyznaczając
sztywność konstrukcji nośnej należałoby rozpatrzyć układ ramowy osadzony na jednej
podporze stałej a drugiej ruchomej. W praktyce inżynierskiej bywa to uciążliwe, gdyż
konstrukcje suwnic bramowych rzadko odpowiadają typowym układom z powszechnie
znanymi rozwiązaniami analitycznymi. Można przyjąć słupy ze względu na naturalną dużo
większą sztywność (elementy ściskane) niż dźwigar (element zginany) jako sztywne
osadzenie
1
. Wyznaczając sztywność można się też posłużyć MES lub skorzystać z pomiaru.
Często (szczególnie dla wielopasmowych układów podnoszenia przy dużej rozpiętości
suwnicy) sztywność układu cięgien nośnych k
l
jest zdecydowanie większa niż sztywność
konstrukcji nośnej k
KN
. Poza tym drgania w linach są silnie tłumione przez występujące w
nich siły tarcia, co powoduje, że bardzo szybko drgania masy m
Q
są identyczne z drganiami
masy m
UP
. Zatem we wszystkich przypadkach, gdy k
l
>> k
KN
można obie masy traktować
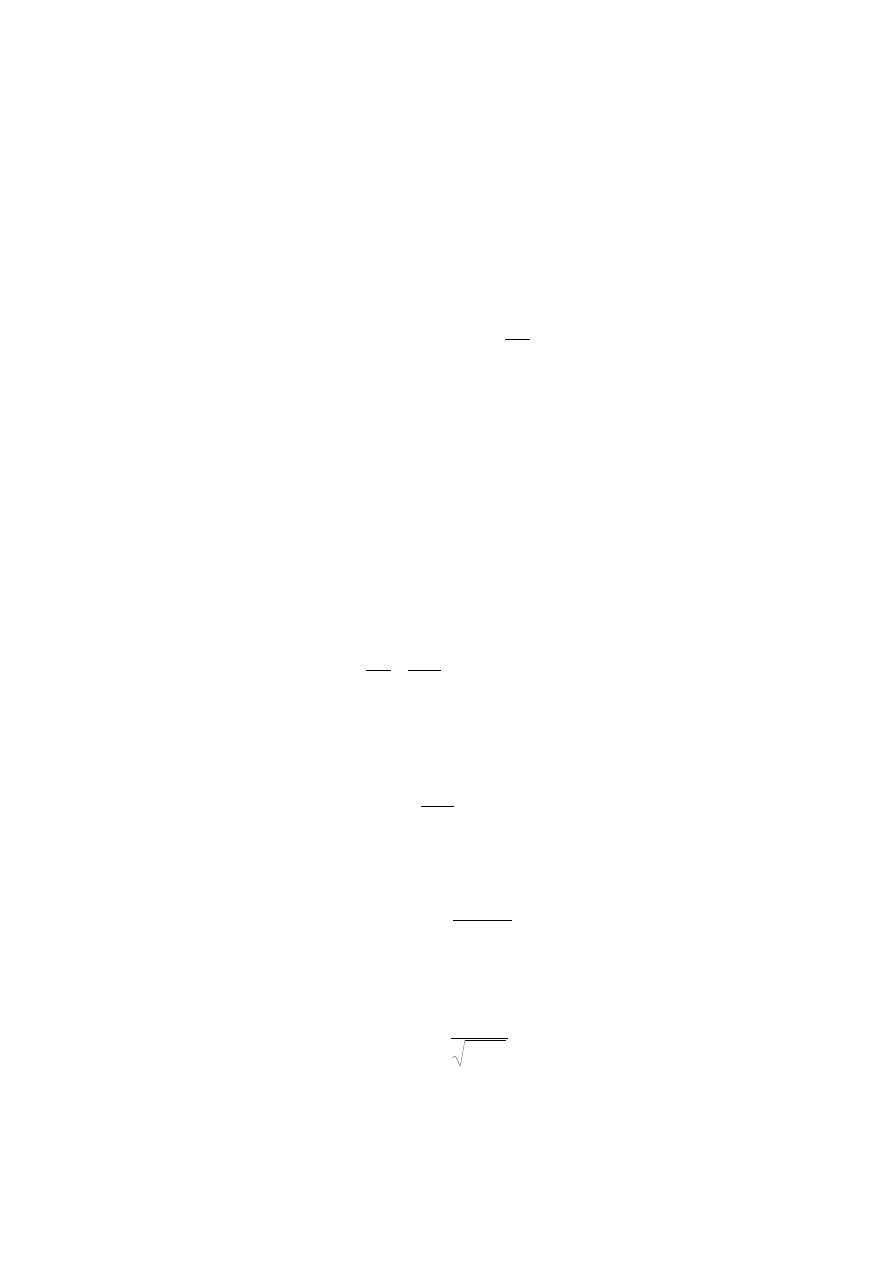
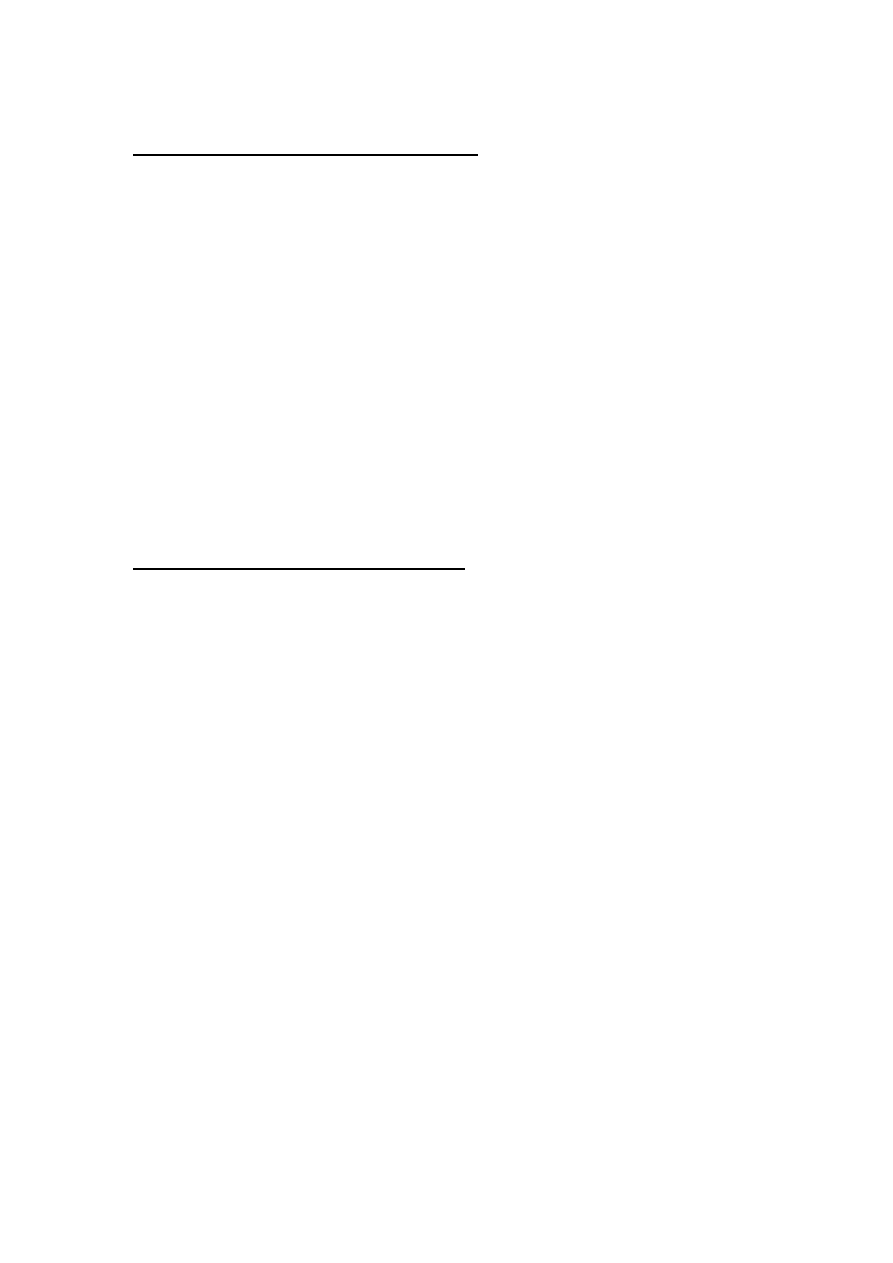
jako związane ze sobą więzią idealnie sztywną. Wtedy masa obciążenia m
Q
oraz masa układu
podtrzymującego m
UP
tworzą jednomasowy model dynamiczny o sztywności k
KN
oraz masie
m (Rys.2.)
Q
UP
m
m
m
+
=
(3)
Rys.2. – Model dynamiczny suwnicy: zastępczy model jednomasowy
1
W rzeczywistości dźwigar powinien być również dostatecznie sztywny, gdyż w suwnicach bramowych przy
zazwyczaj występującej dużej sztywności słupów istnieje ryzyko wystąpienia zjawiska „rozchodzenia się”
dolnej części suwnicy (oddalają się osie wzdłużne zestawów kołowych). Z tego tytułu stosuje się odpowiednio
sztywne mosty lub dodatkowe elementy powodujące „przesztywnienie” dźwigara.
m
UP
m
Q
k
l
k
KN
m
UP
m
Q
k
l
k
KN
a)
b)
c)
m
KN
, k
KN
m
W
k
l
m
Ł
m
Z
4
Opisane powyżej ujęcie jest typowe dla wszystkich przybliżonych metod określania sił
dynamicznych od podnoszonego ładunku. Niekiedy (szczególnie dla przypadków, gdy
sztywność lin nie jest istotnie większa) postuluje się uwzględnienie również ich ugięcia w
obliczeniach sił dynamicznych z wykorzystaniem tego prostego modelu.
Przyjmując oznaczenia z rysunku 2 równanie ruchu można zapisać następująco:
mg
y
k
y
m
KN
=
+
•
•
(4)
Rozwiązanie ogólne tego równania:
KN
k
mg
t
B
t
A
y
+
+
=
0
0
sin
cos
ω
ω
(5)
Największa siła dynamiczna będzie występować w przypadku podrywania ładunku z
podłoża. W pierwszej fazie ruchu podnoszenia układ napędowy wciągnika kasuje luz, co
następuje ze stałą prędkością skracania cięgien v. Prędkość podnoszenia masy m na początku
drugiej fazy można wyznaczyć z zasady zachowania pędu.
0
•
=
y
m
v
m
Q
(6)
Wynika z tego, że
m
v
m
y
Q
/
0
=
•
. Ugięcie początkowe układu w chwili t
0
= 0 wyznaczone
z równania (5) wynosi y
0
= mg/k
KN
. Stałe wynoszą odpowiednio A = 0 i B = m
Q
v
/ mω
0
.
Wynika stąd zależność:
t
m
v
m
k
mg
y
Q
KN
0
0
sin
ω
ω
⋅
+
=
(7)
Pierwszy czynnik równania (7) oznacza oczywiście ugięcie początkowe, natomiast z
drugiego wynika, iż maksymalna amplituda odkształcenia w ruchu drgającym wyniesie:
0
max
ω
m
v
m
y
Q
d
=
(8)
Oznacza to, że maksymalna siła dynamiczna dla przypadku podrywania jest równa:
0
max
max
ω
m
k
v
m
k
y
F
KN
Q
KN
d
d
⋅
=
⋅
=
(9)
Wprowadzając do równania ω
0
2
= k
KN
/m oraz f = y
0
= mg/k
KN
otrzymuje się ostatecznie:
f
g
v
g
m
F
Q
d
⋅
⋅
=
max
(10)
gdzie: f – przemieszczenie zredukowanego środka masy układu o sztywności k
KN
odpowiadające obciążeniu zastępczemu m. Ponieważ dogodniej posługiwać się prędkością
nominalną podnoszenia w liczniku wzoru (10) wielkość chwilową prędkości „v” można

5
zastąpić wyrażeniem ξv
p
, gdzie ξ jest współczynnikiem uwzględniającym warunki ruchowe
mechanizmu podnoszenia. W układach bez regulacji prędkości ξ = 1. W powyższym wzorze
czynnik z pierwiastkiem w mianowniku nazywany jest nadwyżką dynamiczną i oznaczany ψ.
Oznacza on jak dużo dodatkowej siły w stosunku do tej wynikającej z ładunku (m
Q
g)
pojawiło się w układzie podnoszenia.
Siły dynamiczne w ujęciu normowym
Zbliżone rozumowanie przeprowadza się przy przygotowaniu norm w części dotyczącej
określania obciążeń dynamicznych w mechanizmach podnoszenia. Stosuje się układ
dynamiczny zredukowany do modelu jednomasowego. Masy układu redukuje się do środka
ciężkości masy podnoszonego ładunku, a sztywność przyjmuje się nieco inaczej niż w
powyżej pokazanych rozważaniach – określa się sztywność zastępczą wynikającą ze
sztywności konstrukcji nośnej i cięgien nośnych. W niniejszej instrukcji przedstawione
zostaną dwa sposoby określania obciążeń dynamicznych – wymienione w normie [4] oraz w
normie [3]. Norma [5] ze względu na zbliżone do [3] zasady wyznaczania sił dynamicznych
zostanie tu pominięta.
PN-M-06514:1986
Norma ta nie jest już obecnie ważna
2
, nie mniej jednak dla celów porównawczych
zostaną przedstawione główne zasady szacowania sił dynamicznych.
Dokument ten rozróżnia:
•
największą wartość siły dynamicznej - F
d max
= d · F
Q
•
przeciętną wartość siły dynamicznej - F
d
= 0.65·d·F
Q
Występujący w powyższych zależnościach współczynnik dynamiczny d dobiera się z
tabel w zależności od typu dźwignicy i prędkości podnoszenia. Dla suwnic bramowych,
hakowych wynosi on:
- 0.16
dla prędkości podnoszenia v
p
≤ 0.1 [m/s]
- 1.60 · v
p
dla prędkości podnoszenia 0.1 [m/s] < v
p
≤ 1.00 [m/s]
- 1.60
dla prędkości podnoszenia v
p
≥ 1.00 [m/s]
Wielkość F
Q
oznacza siłę udźwigu (wynikającą z masy podnoszonego ładunku i masy
zblocza lub innych urządzeń chwytnych).
Obliczone wg powyższych zasad siły dynamiczne uwzględnia się w obliczeniach
inżynierskich dodając je do wartości siły udźwigu F
Q
.
PN-EN 13001-2:2007
W tej normie wpływ sił dynamicznych określa współczynnik φ
2
. Jego wartość zależy od
klasy podnoszenia suwnicy (zależnie od sztywności konstrukcji nośnej i charakterystyk
dynamicznych układu napędowego - wielkości φ
2min
, β
2
) oraz prędkości podnoszenia
(zależnie od możliwości sterowania prędkościami podnoszenia – wielkość v
h
). Wyrażany jest
poniższym wzorem:
φ
2
= φ
2min
+ β
2
· v
h
Dla suwnic bramowych o własnościach urządzenia dostępnego w ramach ćwiczenia
można przyjąć φ
2min
= 1.20, β
2
= 0.68. Prędkość v
h
podstawia się w m/s i zależnie od
charakteru pracy i możliwości układu sterowania przyjąć jako nominalną lub dokładną.
Obliczony wg powyższych zasad wpływ siły dynamicznych uwzględnia się w
obliczeniach inżynierskich mnożąc współczynnik φ
2
i siłę udźwigu m
Q·
g.
2
Norma zastąpiona przez PN-ISO 8686:1999.

6
3. WYKONANIE ĆWICZENIA
W ćwiczeniu przeprowadza się obliczeniowe (na przykładzie dwóch rzeczywistych
suwnic – jednej pomostowej i jednej bramowej) oraz doświadczalne (dokonywane w oparciu
o zainstalowaną w laboratorium suwnicę bramową) określenie sił dynamicznych w
mechanizmach podnoszenia suwnic.
Istotne dla przeprowadzenia ćwiczenia parametry suwnic dostępne są na stanowisku.
Przebieg ćwiczenia:
•
ogólne zadanie
- w ćwiczeniu należy dokonać obliczeniowego oszacowania sił dynamicznych (w
oparciu o model teoretyczny i normy przedmiotowe) oraz wyznaczyć siły
dynamiczne od podnoszonego ładunku na podstawie pomiarów.
•
część obliczeniowa
- wyznaczyć sztywności - oddzielnie dla cięgien nośnych oraz mostów obu suwnic.
- dodatkowo, dla suwnicy bramowej wyznaczyć sztywność konstrukcji nośnej
wprost z definicji sztywności wiedząc
3
, że dla tej suwnicy ugięcie dźwigara pod
obciążeniem wynikającym z ładunku o masie 3125 [kg] wynosi 2.25 [mm].
- obliczyć ugięcia konstrukcji nośnej f w połowie długości dźwigara wynikającej z
przyłożenia w tym miejscu siły wynikającej z masy m
Q
oraz zredukowanej masy
własnej dla obu suwnic – wykonać to dla dwóch przypadków: obciążenie
nominalne na haku i 10% obciążenia nominalnego (to drugie odpowiada
obciążeniu, które będzie dostępne podczas części praktycznej).
- obliczyć ugięcia lin suwnic dla obu wielkości obciążenia m
Q
.
- korzystając z wyznaczonych ugięć obliczyć wartości nadwyżek dynamicznych na
podstawie modelu teoretycznego (wzór 10) – w przypadkach z uwzględnieniem i
bez uwzględnienia ugięcia lin.
- wyznaczyć wartości sił dynamicznych wynikające z zaleceń obu przedstawionych
w instrukcji norm przedmiotowych.
•
część praktyczna
- ustawić suwnicę w miejscu przeznaczonym do wykonania ćwiczenia, uzyskać
położenie wciągnika w połowie dźwigara, opuścić zblocze,
- podczepić ładunek (przygotowane dla celów ćwiczenia obciążniki) pamiętając o
umieszczeniu czujnika siły pomiędzy ładunkiem a hakiem,
- uruchomić układ pomiarowy, wykonać kilka ruchów z wykorzystaniem
mechanizmu podnoszenia (podnoszenie z podłoża przy luźnych linach,
podnoszenie z podłoża przy wstępnie napiętych linach, podnoszenie „z
powietrza”, hamowanie opuszczania), zarejestrować i zapisać wyniki pomiarów,
- podobną procedurę można przeprowadzić dla innego usytuowania wciągnika i
ładunku na długości dźwigara oraz dla innych mas podnoszonego ładunku.
•
sprawozdanie
- w sprawozdaniu należy przedstawić obliczenia sił i nadwyżek dynamicznych w
oparciu o model teoretyczny oraz zalecenia normowe,
- przedstawić zarejestrowane na stanowisku przebiegi sił i na ich podstawie
określić siły dynamiczne,
3
Ugięcie zmierzono metodą różnicową jako różnica położenia pionowego środka dźwigara bez obciążenia i pod
obciążeniem.

7
- porównać wyniki obliczeniowe i uzyskane z pomiarów,
- ocenić słuszność założeń i zastosowania uproszczonego modelu jednomasowego
do opisu dynamiki badanej suwnicy,
- porównać uzyskane w czasie pomiarów siły dynamiczne dla różnych ustawień
wciągnika oraz dla różnych mas ładunku,
- wyciągnąć wnioski.
4. WYMAGANY ZAKRES WIADOMOŚCI OGÓLNYCH
- pojęcie sztywności mechanicznej,
- obliczanie ugięcia belek i ram statycznie wyznaczalnych,
- krążki i wielokrążki – sprawności, przełożenia
5. LITERATURA
[1] Piątkiewicz, A., Sobolski, R., „Dźwignice”, WNT, Warszawa, 1977.
[2] Borkowski, W., Konopka, S., Prochowski, L., „Dynamika maszyn roboczych”, WNT,
Warszawa, 1996.
[3] PN-EN 13001-2 : 2007 „Bezpieczeństwo dźwignic. Ogólne zasady projektowania.
Część 2: Obciążenia”.
[4] PN-M-06514 : 1986 „Dźwignice. Obciążenia w obliczeniach ustrojów nośnych
dźwignic”.
[5] PN-ISO 8686 : 1999 „Dźwignice. Zasady obliczania i kojarzenia obciążeń.
Postanowienia ogólne”.
8
ZAŁĄCZNIK 1
Dane suwnicy pomostowej dwudźwigarowej:
H
p
[m] 6.50
- wysokość podnoszenia
H
[m] 5.00
- długość pasm lin w momencie poderwania ładunku
v
p
[m/min] 6.00
- prędkość podnoszenia nominalna
v [m/min] 6.00
- prędkość podnoszenia w momencie poderwania
v
pp
[m/min] 1.00
- prędkość podnoszenia dokładna
R
[m] 12.50
- rozpiętość suwnicy
I
XX
[cm
4
] 105700
- moment bezwł. przekroju jednego dźwigara
Q
N
[kg] 15000
- udźwig nominalny
m
DZ
[kg] 13000
- masa dźwigara (m
KN
= 0.5 m
DZ
)
m
W
[kg] 4600
- masa wciągarki
m
Q
[kg] 1500
- masa ładunku równa 10% Q
N
E [MPa] 205000
- moduł Younga dla stali
E
L
[MPa] 145000
- współczynnik sprężystości dla liny
d [mm] 8
- średnica liny
C
[-] 0.433
- wsp. powierzchni stalowej przekroju
n
[szt] 6
- liczba pasm liny wielokrążka
Dane suwnicy bramowej (w laboratorium):
H
p
[m] 6.00
- wysokość podnoszenia
H
[m] 4.50
- długość pasm lin w momencie poderwania ładunku
v
p
[m/min] 6.00
- prędkość podnoszenia nominalna
v [m/min] 5.80
- prędkość podnoszenia w momencie poderwania
v
pp
[m/min] 1.00
- prędkość podnoszenia dokładna
R
[m] 4.52
- rozpiętość suwnicy
I
XX
[cm
4
] 22930
- moment bezwł. przekroju dźwigara (dwuteownik)
Q
N
[kg] 2500
- udźwig nominalny
m
DZ
[kg] 545
- masa dźwigara (m
KN
= 0.5 m
DZ
)
m
W
[kg] 256
- masa wciągnika
m
Q
[kg] ~253
- masa ładunku wraz z elementami chwytnymi
(dokładną wartość podnoszonej masy można
odczytać przed pomiarem z układu pomiarowego)
E [MPa] 205000
- moduł Younga dla stali
E
L
[MPa] 145000
- współczynnik sprężystości dla liny
d [mm] 7
- średnica liny (lina 8x19W)
C
[-] 0.349
- wsp. powierzchni stalowej przekroju
n
[szt] 4
- liczba pasm liny wielokrążka
Wyszukiwarka
Podobne podstrony:
D3 Obciążenia dźwignic Siły dynamiczne podnoszenia
D6 Obciążenia dźwignic Siły dynamiczne ruchów torowych suwnicy
D6 Obciazenia dzwignic Sily dynam
Kształtowanie mocy i siły dynamicznej z elementami techniki
(TRENING SIŁY DYNAMICZNEJ W FORMIE STACJI)
mechanika, sciaga mechana(2), 1 zasada dynamiki-jeśli na ciało nie działa żadna siła lub siły działa
sprawozdanie silnik prądu stałego obcowzbudny rozruch?z obciążenia na wale pomiary dynamiczne
obciążenie statyczne i dynamiczne
Analiza dynamiczna typoszeregu belkowych mostów stalowych obciążonych pociągiem poruszającym się
2 Ocena obciążenia fizycznego podczas pracy wysiłek dynamiczny statyczny monotypowość ruchów wydolno
Dynamiczne skutki działania nie zrównoważonej siły
Dynamika mechanizmu podnoszenia
WZMOCNIENIA FUNDAMENTÓW OBCIĄŻONYCH DYNAMICZNIE
c 03 obciazenie statyczne i dynamiczne
obciążenie statyczne i dynamiczne
94 Siły przekrojowe w załamanym pręcie płaskim obciążonym siłami skupionymi dowolnie usytuowanymi
więcej podobnych podstron