
Pracownia Automatyki Katedry Tworzyw Drzewnych Ćwiczenie 11 str.1/1
ĆWICZENIE 11
AUTOMATYZACJA STANOWISKA DO WIERCENIA
OTWORÓW W BOCZNYCH PŁASZCZYZNACH PŁYT
1. CEL ĆWICZENIA:
zapoznanie się z logiką tworzenia i przesyłania sygnałów elektrycznych i
pneumatycznych na przykładzie automatycznego sterowania wiertarki oraz podawania i
przesuwu formatek płyt.
1.1. Opis stanowiska.
Jednym z podstawowych ogniw w przemyśle meblarskim są stanowiska do wiercenia
otworów w płytach wiórowych. Otwory te stanowią podstawę do łączenia na kołki różnych
elementów meblowych. Wymagana bardzo duża dokładność rozstawu otworów (0,1 mm na całej
długości boku o wymiarach do 2000 mm) przy dużej ilości otworów (do kilkunastu w jednym
elemencie) stwarza konieczność budowy w pełni zautomatyzowanych wiertarek.
Stanowisko do przeprowadzenia ćwiczenia jest w pełni zmontowane, a na przedniej
płycie układu sterującego naniesiono schemat kinematyczny z wmontowanymi lampkami
sygnalizującymi załączanie prądu i sprężonego powietrza do poszczególnych elementów. Na
rys.1 przedstawiono elektryczny schemat układu sterowania.
W skład układu wchodzą:
wiertarka elektryczna z wiertłem osadzonym we wrzecionie,
siłownik pneumatyczny jednostronnego działania o ruchu roboczym posuwu wiertarki i
ruchu cofania energią sprężyny zamontowanej w siłowniku,
siłownik pneumatyczny dwustronnego działania służący do przesuwu formatek,

Pracownia Automatyki Katedry Tworzyw Drzewnych Ćwiczenie 11 str.2/2
dwa zawory elektromagnetyczne dwudrożne służące do załączania, wyłączania i
przełączania dopływu sprężonego powietrza (zawory działają w ten sposób, że podanie
napięcia znamionowego na cewkę elektromagnesu następuje otwarcie grzybka zaworu),
jeden zawór elektromagnetyczne trójdrożne służące do załączania, wyłączania i
przełączania dopływu sprężonego powietrza (zawory działają w ten sposób, że podanie
napięcia znamionowego na cewkę elektromagnesu następuje otwarcie grzybka zaworu),
trzy wyłączniki krańcowych (kontraktony) służących do tworzenia sygnałów
elektrycznych określających aktualny stan układu,
dwa wyłączniki krańcowe mechaniczne
sterownik LOGO realizujący funkcje logiczne dla prawidłowej pracy sterowania.
2. Elementy przełączające.
2.1 Elementy łączeniowe, albo łączniki, to ogólna nazwa urządzeń służących do łączenia,
odłączania lub przełączania obwodów prądu elektrycznego, uruchamianych ręcznie lub zdalnie.
Konstrukcja łącznika, czyli materiały izolacyjne, z których jest zbudowany oraz przerwa
międzystykowa jest zależna od napięcia pracy urządzenia. Ważna jest wysokość natężenia prądu.
Należy zwrócić uwagę na fakt, że w momencie włączania urządzeń występują duże udary
prądowe przy wielu obciążeniach.
Zdolność do przewodzenia prądu (wytrzymałość prądowa) zależy od kształtu powierzchni
styków, rodzaju materiału oraz siły dociskającej współpracujące styki. Należy zwrócić uwagę na
to, że wytrzymałość prądowa jest różna dla prądu stałego i zmiennego. Ma to bezpośredni
związek z możliwością gaszenia łuku powstającego podczas przerywania prądu. Aby zgasić łuk
należy rozsunąć styki na odpowiednią odległość lub zmniejszyć odpowiednio wartość prądu. W
przypadku prądu zmiennego natężenie prądu zmniejsza się okresowo do zera, co ułatwia
gaszenie łuku.
Prąd przemienny nie powoduje przemieszczania się materiału z jednego styku na drugi. W
przypadku prądu stałego niektórzy producenci zaznaczają biegunowość styków. Wtedy jeden
styk jest posrebrzony, a drugi wykonany z litego srebra. Polaryzacja ustalona jest w ten sposób,
aby materiał wędrował z kontaktu zrobionego z litego srebra do posrebrzanego.
Na materiał izolacyjny przełącznika powinno się zwracać szczególną uwagę gdy ma być on
zastosowany w obwodach wysokiej częstotliwości. Wynika to ze strat w materiałach izolacyj-
nych, które rosną z częstotliwością. Urządzenia stosowanie w obwodach prądu wielkiej

Pracownia Automatyki Katedry Tworzyw Drzewnych Ćwiczenie 11 str.3/3
częstotliwości wymagają używania materiałów ceramicznych lub PTFE. Dla bardzo wysokich
częstotliwości, powinny być również odpowiednio kształtowane drogi przewodzenia prądu, a
także muszą być dopasowywane i dostrajane impedancje obwodów, aby straty i odbicia
sygnałów były jak najmniejsze.
Ze względu na konstrukcję mechaniczną rozróżniamy następujące typy przełączników:
Przełączniki przechylne (dźwigienkowe)
Wymagają zwykle znacznej siły do przełączania oraz odznaczają się dużym skokiem, ale za to
położenia i szybkość przełączania są jednoznacznie określone.
Przełączniki suwakowe
Nie mają równie jednoznacznych położeń. Używa się ich w obwodach niskonapięciowych i
niskoprądowych, np. jako miniaturowe przełączniki w obudowach DIL.
Mikroprzełączniki
Są idealnym rozwiązaniem w sytuacjach, gdy wymagana jest mała siła przełączenia przy
niewielkim skoku. Dzięki oryginalnej konstrukcji, droga przemieszczenia styków jest
wielokrotnie większa niż odcinek przebyty przez dźwignię wywołującą ten ruch. Istota
konstrukcji polega na zastosowaniu płytki sprężystej dołączonej do styku ruchomego, która
może przyjmować tylko dwa położenia skrajne, przemieszczając wraz ze sobą styk. Każde
położenie pośrednie jest niestabilne. Dzięki temu uzyskuje się dokładne i jednoznaczne
położenia robocze styku, a przy tym czas przełączenia jest bardzo krótki.
Kontaktrony
Są hermetycznymi przełącznikami czułymi na pole magnetyczne. W rurce szklanej zatopione są
styki wykonane z materiału magnetycznego, które pod wpływem przykładanego zewnętrznego
pola magnetycznego zwierają się lub rozwierają. Kontaktrony występują jako samodzielne
elementy lub w formie przekaźników kontaktronowych.
Przy stosowaniu kontaktronów należy zwrócić uwagę na następujące sytuacje:
- skracanie lub zaginanie wyprowadzeń kontaktronu powoduje zmniejszenie jego czułości,
- zaginanie i przeginanie wyprowadzeń może spowodować pęknięcie lub wykruszenie rurki
szklanej, w której zatopione są wyprowadzenia. Przy tego typu manipulacjach należy zachować
szczególną ostrożność i umieszczać szczypce od strony szkła, tego problemu nie ma w
kontaktronach z płaską obudową i płaskimi wyprowadzeniami.

Pracownia Automatyki Katedry Tworzyw Drzewnych Ćwiczenie 11 str.4/4
OPIS FUNKCJI
SP (Single Pole) - jednobiegunowy.
DP (double pole) - 2-biegunowy.
ST (Single Throw) - dwustanowy, z wyjściem tylko w jednej pozycji, tj. zwierny lub rozwierny
DT (Double Throw), CO (Change Over) - dwupozycyjny przełączny
Forma A: styk zwierny.
Forma B: styk rozwierny.
Forma C: styk przełączny, break-before-make.
Forma D: styk przełączny, make-before-break.
Ewentualna cyfra przy oznaczeniu podaje liczbę styków.
Zwierający (make before break):
Kiedy przełącznik zmienia położenia, najpierw następuje zwarcie z nową pozycją, potem
rozłączenie z poprzednią. Oznacza to chwilowe zwarcie ze sobą obu pozycji.
Nie zwierający (break before make):
Kiedy przełącznik zmieniając pozycję najpierw rozwiera poprzednią, potem zwiera nową. Nie
ma wówczas zwarcia między dwoma wyjściami. W wielu zastosowaniach istotne jest, który z
wariantów zostanie wybrany:
Astabilny, chwilowy, samo powracający, normalnie zwarty (ang. NC), normalnie rozwarty
(ang. NO).
Zwierny, rozwierny - określenia używane dla styków, które mają pewne ustalone położenie
wyjściowe i do niego powracają po zwolnieniu przycisku sterującego. Terminu "samo
powracający" trzeba używać ostrożnie, gdyż może on również oznaczać, że do położenia
wyjściowego powraca sam przycisk, a nie styki. Oznaczenia (wf.) i (wyt.) stosuje się do styków
powracających samoczynnie z pozycji roboczej wf. lub wyt. Terminy "zwierny" i "rozwierny"
informują, jak zmienia się pozycja styku w stosunku do wyjściowej.
Termin "bistabilny" (latching action):
oznacza, że przy pierwszym naciśnięciu następuje zmiana położenia styków, które powracają do
położenia wyjściowego dopiero po drugim naciśnięciu.
Przełączniki współzależne (działanie grupowe):
oznacza to, że kilka przełączników połączonych jest w grupę w taki sposób, że po wciśnięciu
któregokolwiek z nich, inne powracają do położenia wyjściowego.

Pracownia Automatyki Katedry Tworzyw Drzewnych Ćwiczenie 11 str.5/5
Przekaźniki i styczniki
Są to urządzenia łączeniowe sterowane zdalnie zwykle za pomocą przepływu prądu przez cewkę,
która siłą elektromagnetyczną powoduje przemieszczenie styków. Przekaźniki i styczniki dzieli
się głównie ze względu na funkcje styków i parametry techniczne cewek.
Funkcja stykowa
Styki mogą być:
- zwierne (typ A),
- rozwierne (typ B)
- przełączne (typ C).
Konstrukcja mechaniczna styków zależy od mocy maksymalnej, która ma być przenoszona. Moc
ta zależy od siły docisku styków, wielkości powierzchni stykowych oraz rodzaju materiału z
którego są wykonane. Pełne dane obejmują dopuszczalne wartości napięcia, prądu i mocy
przenoszonej.
Dane techniczne cewek
Przekaźniki i styczniki mogą mieć cewki aktywujące, przystosowane do pracy z prądem stałym
lub zmiennym. Napięcia zasilające są zwykle z zakresu 5 - 220 V. Przy doborze przekaźnika,
ważnym parametrem jest własny pobór mocy przez cewkę przekaźnika. Przy prądzie stałym
bezpośrednio zależy to od rezystancji uzwojenia: im jest ona wyższa tym mniejszy będzie pobór
mocy. W katalogu podane są wartości napięcia zasilającego (U) i rezystancje cewek (R). Moc
własną cewki można wyliczyć ze wzoru: P =U
2
/R
PRZEKAŹNIKI SPECJALNE
Przekaźniki blstabilne
Są to przekaźniki, które mają dwa położenia spoczynkowe i pozostają w każdym z nich do
momentu przyłożenia impulsu o przeciwnej polaryzacji. W przekaźnikach dwucewkowych jedna
z cewek służy do przełączania w jedną stronę, np. do łączenia obwodu, a druga cewka do
rozłączania.
Przełączniki półprzewodnikowe
składają się najczęściej z części sterującej i części wykonawczej. Zazwyczaj między tymi
stopniami stosuje się element izolujący np. transoptor (dioda świecąca - fototranzystor) lub
kontaktron. W zależności od rodzaju i wielkości prądu, wyjściowy stopień mocy jest
zrealizowany na tranzystorze, triaku albo na dwóch przeciwnie skierowanych tyrystorach.
Przekaźniki kontaktronowe
Zbudowane są z opisanego wcześniej kontaktronu i cewki elektromagnetycznej.
Pracownia Automatyki Katedry Tworzyw Drzewnych Ćwiczenie 11 str.6/6
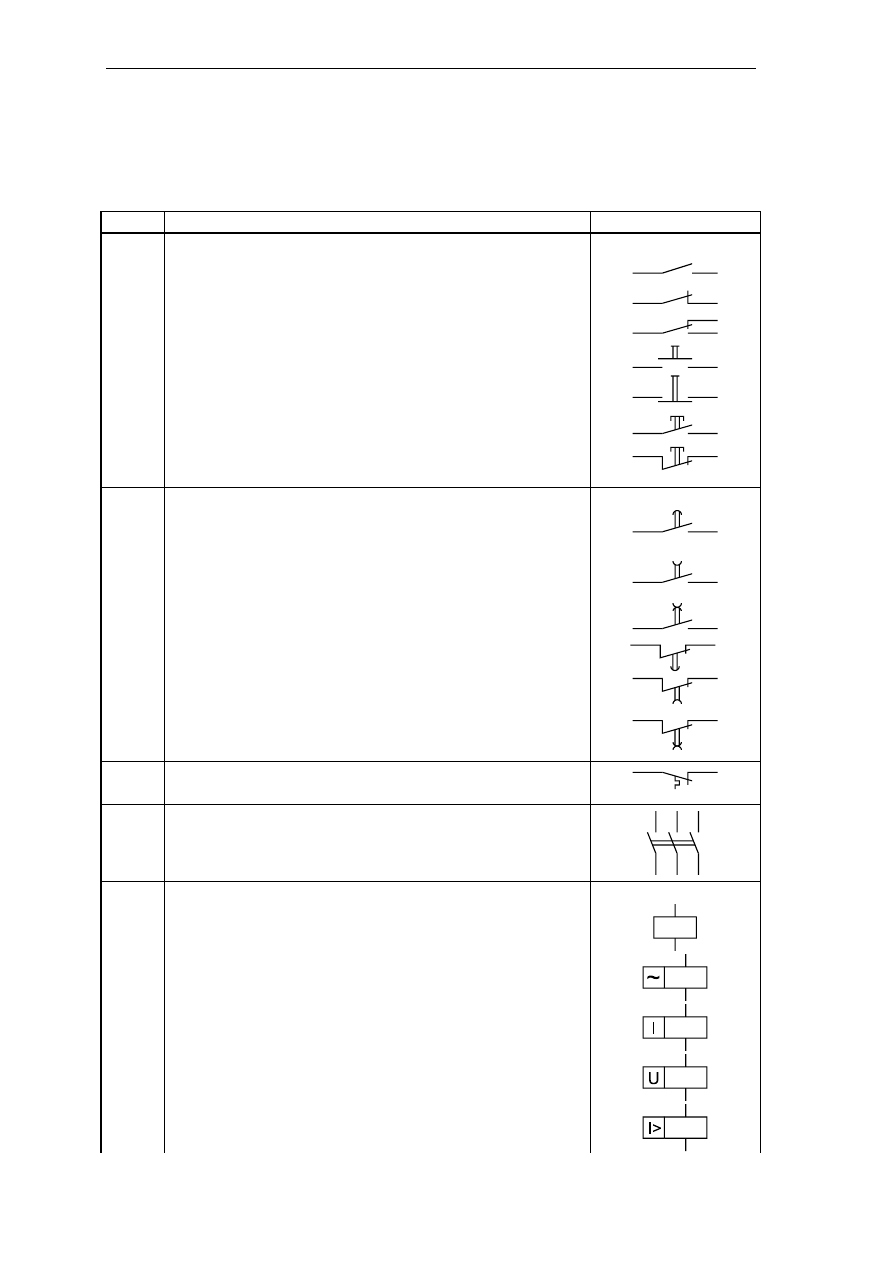
2.2 Wybrane symbole elementów elektrycznych
Tab. 1.
Lp. Nazwa
Symbol
1. Zestyk
łącznika
a) zwierny (normalnie otwarty)
b) rozwierny (normalnie zamknięty)
c)
przełączny
d) zwierny o napędzie ręcznym
e) rozwierny o napędzie ręcznym
f) zwierny o napędzie ręcznym z samoczynnym
powrotem (przycisk)
g) rozwierny o napędzie ręcznym z samoczynnym
powrotem (przycisk)
2. Zestyk
przekaźnika o opóźnionym działaniu (zwłoczny)
a) zwierny ze zwłoką przy zamykaniu
b) zwierny ze zwłoką przy otwieraniu
c) zwierny ze zwłoką przy otwieraniu i zamykaniu
d) rozwierny ze zwłoką przy zamykaniu
e) rozwierny ze zwłoką przy otwieraniu
f) rozwierny ze zwłoką przy otwieraniu i zamykaniu
3.
Zestyk rozwierny przekaźnika cieplnego
4.
Łącznik trójbiegunowy
5. Cewka
przekaźnika, stycznika
a) symbol ogólny (cewka stycznika narysowana jest
grubszą linia niż cewka przekaźnika)
b) cewka prądu przemiennego
c) cewka prądowa
d) cewka napięciowa
e) cewka przekaźnika nadprądowego
Pracownia Automatyki Katedry Tworzyw Drzewnych Ćwiczenie 11 str.7/7
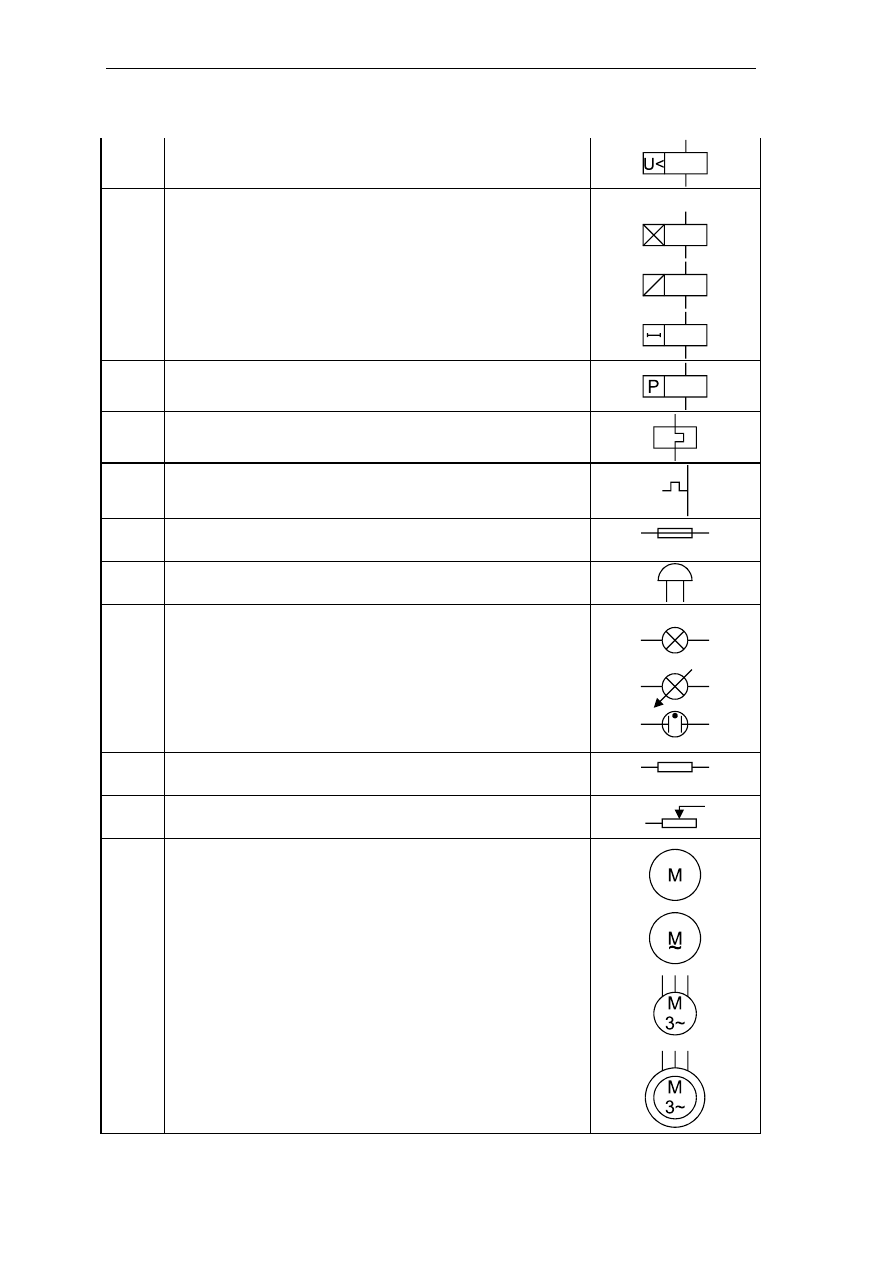
f) cewka przekaźnika podnapięciowego
6. Cewka
przekaźnika zwłocznego
a) ze zwłoką przy wzbudzaniu
b) ze zwłoką przy odwzbudzaniu
c) ze zwłoką przy wzbudzaniu i odwzbudzaniu
7. Cewka
przekaźnika spolaryzowanego (biegunowego)
8. Organ
napędowy przekaźnika cieplnego
9. Zabezpieczenie
nadprądowo-cieplne
10. Bezpiecznik
topikowy
11. Dzwonek
12. Lampka
sygnalizacyjna
a) symbol ogólny
b) z regulowanym strumieniem świetlnym
c)
neonówka
13. Rezystor
stały
14. Rezystor
nastawny
15. Silnik
a) symbol ogólny
b) na prąd przemienny
c) asynchroniczny trójfazowy o wirniku zwartym
d) asynchroniczny trójfazowy o wirniku pierścieniowym
Pracownia Automatyki Katedry Tworzyw Drzewnych Ćwiczenie 11 str.8/8
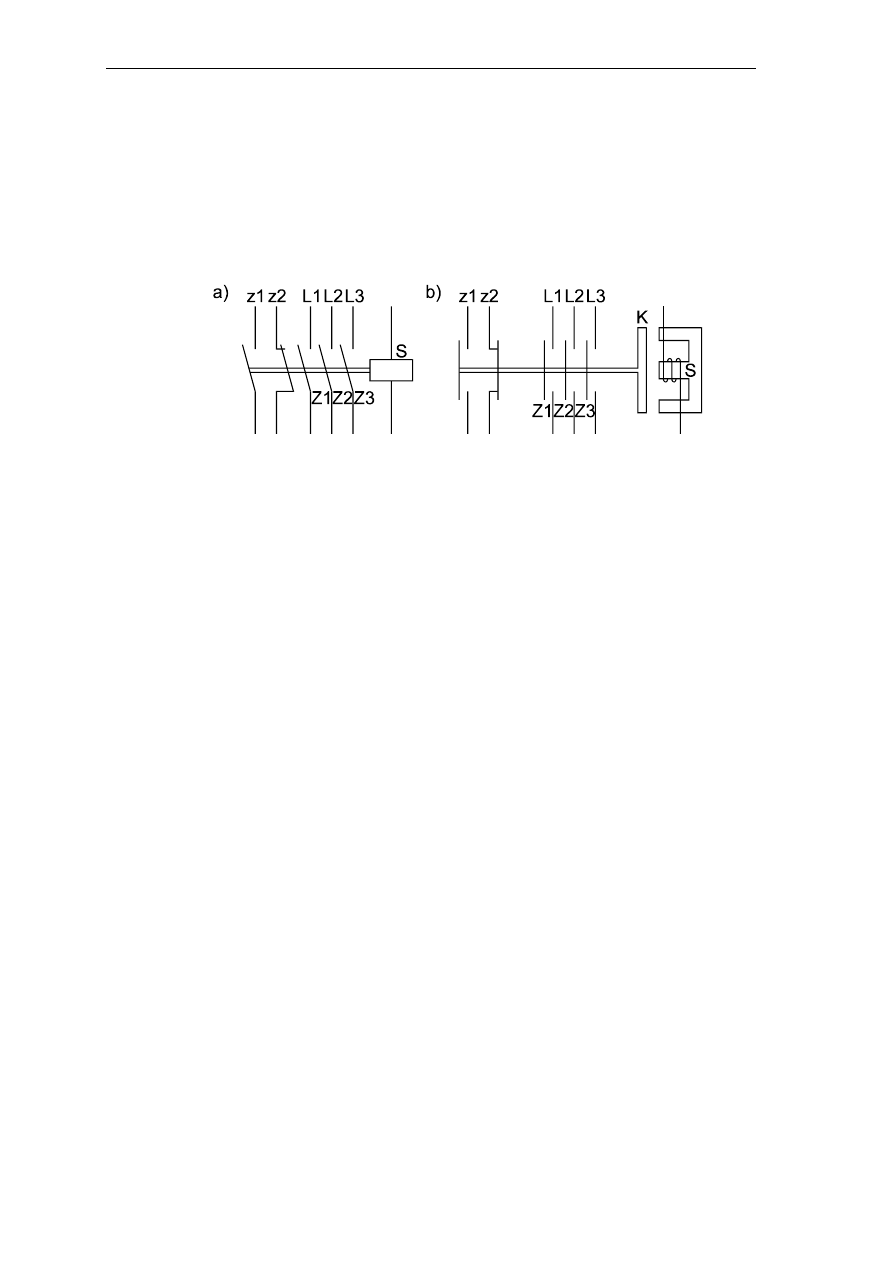
2.3 Przykładowa budowa stycznika
Styczniki są to łączniki wykonywane z napędem elektromagnesowym, przy czym zestyki
główne tak długo są zwarte, jak długo płynie prąd przez cewkę elektromagnesu stycznika.
Styczniki budowane są na prądy do 400A. Dla większych prądów wykonywane są łączniki
zapadkowe.
Symbol graficzny (a) oraz schematyczne przedstawienie budowy (b) stycznika o trzech
zestykach zwiernych Z1, Z2, Z3 w obwodzie głównym i po jednym zestyku zwiernym z1
i rozwiernym z2 w obwodzie pomocniczym.
3 PRZEBIEG ĆWICZENIA
3.1
Włączyć zasilanie energii elektrycznej i sprężonego powietrza.
3.2 Zaprogramować sterownik LOGO zgodnie ze schematem rys. 1.
- uruchomić sterownik i dokładnie obserwować czynności wykonywane i sygnalizowane
przez układ
- jaka jest przyczyna powstawania suwu tłoka siłownika do przodu?
- jaka jest przyczyna powstawania suwu tłoka siłownika do tyłu?
- jaką funkcję pełni blok B02?
3.3 Zaprogramować sterownik LOGO zgodnie ze schematem rys. 2.
- uruchomić sterownik i dokładnie obserwować czynności wykonywane i sygnalizowane
przez układ
- jaką funkcję pełni blok B03 i B04?
- dlaczego wykorzystano przycisk I6?
3.4 Zaprogramować sterownik LOGO zgodnie ze schematem rys. 2.

Pracownia Automatyki Katedry Tworzyw Drzewnych Ćwiczenie 11 str.9/9
- uruchomić sterownik i dokładnie obserwować czynności wykonywane i sygnalizowane
przez układ
- jaką funkcję pełni blok B03 i B04?
- dlaczego wykorzystano przycisk I6?
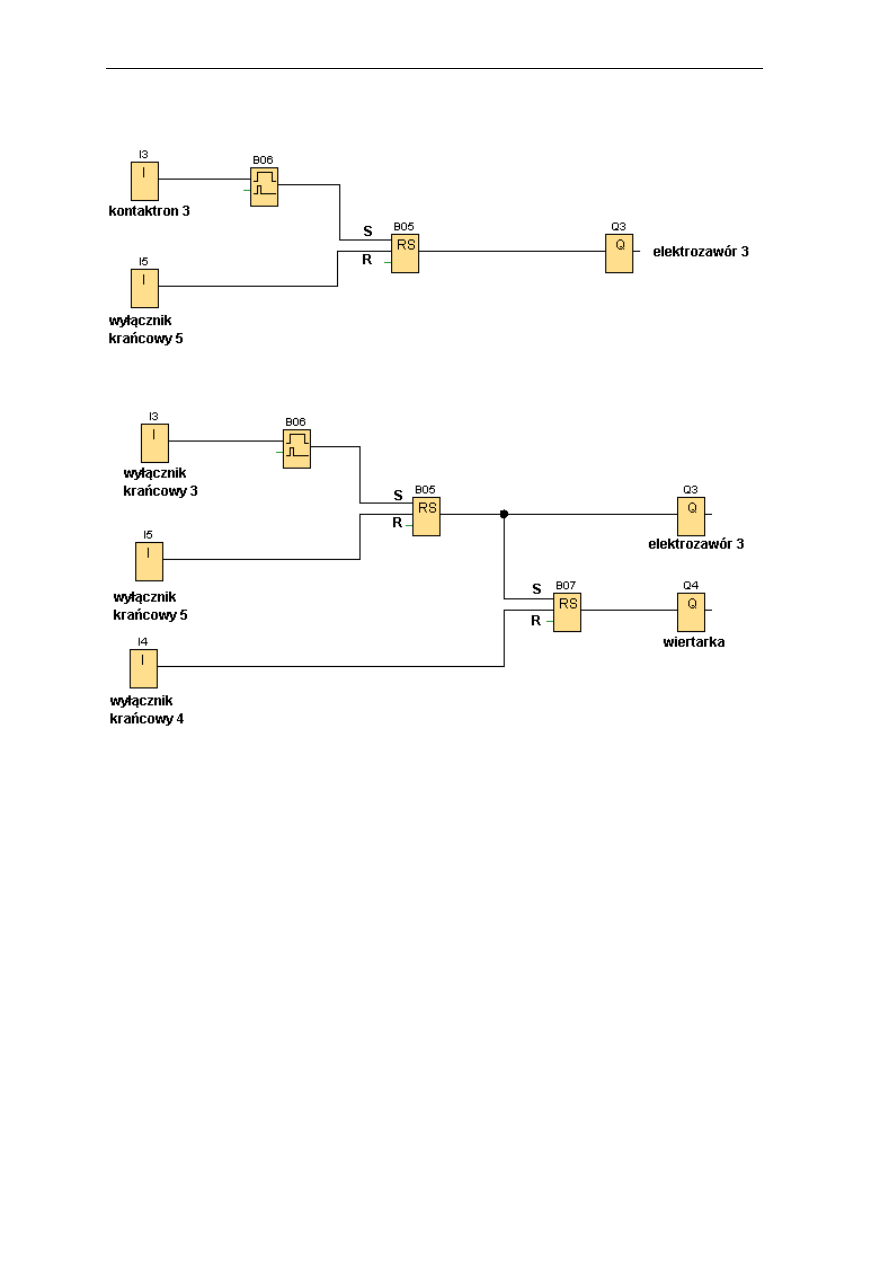
3.5 Zaprogramować sterownik LOGO zgodnie ze schematem rys. 3.
- uruchomić sterownik i dokładnie obserwować czynności wykonywane i sygnalizowane
przez układ
- podać przyczynę ruchu siłownika wiertarki do przodu
- jak powstaje sygnał zakończenia wiercenia otworów i powrotu siłownika do pozycji
wyjściowej?
- jaką funkcję pełni blok B06?
3.6 Zaprogramować sterownik LOGO zgodnie ze schematem rys. 4.
- uruchomić sterownik i dokładnie obserwować czynności wykonywane i sygnalizowane
przez układ
- jaki
sygnał powoduje włączenie wiertarki?
- gdzie i kiedy jest formowany sygnał do zatrzymania obrotów wiertarki?
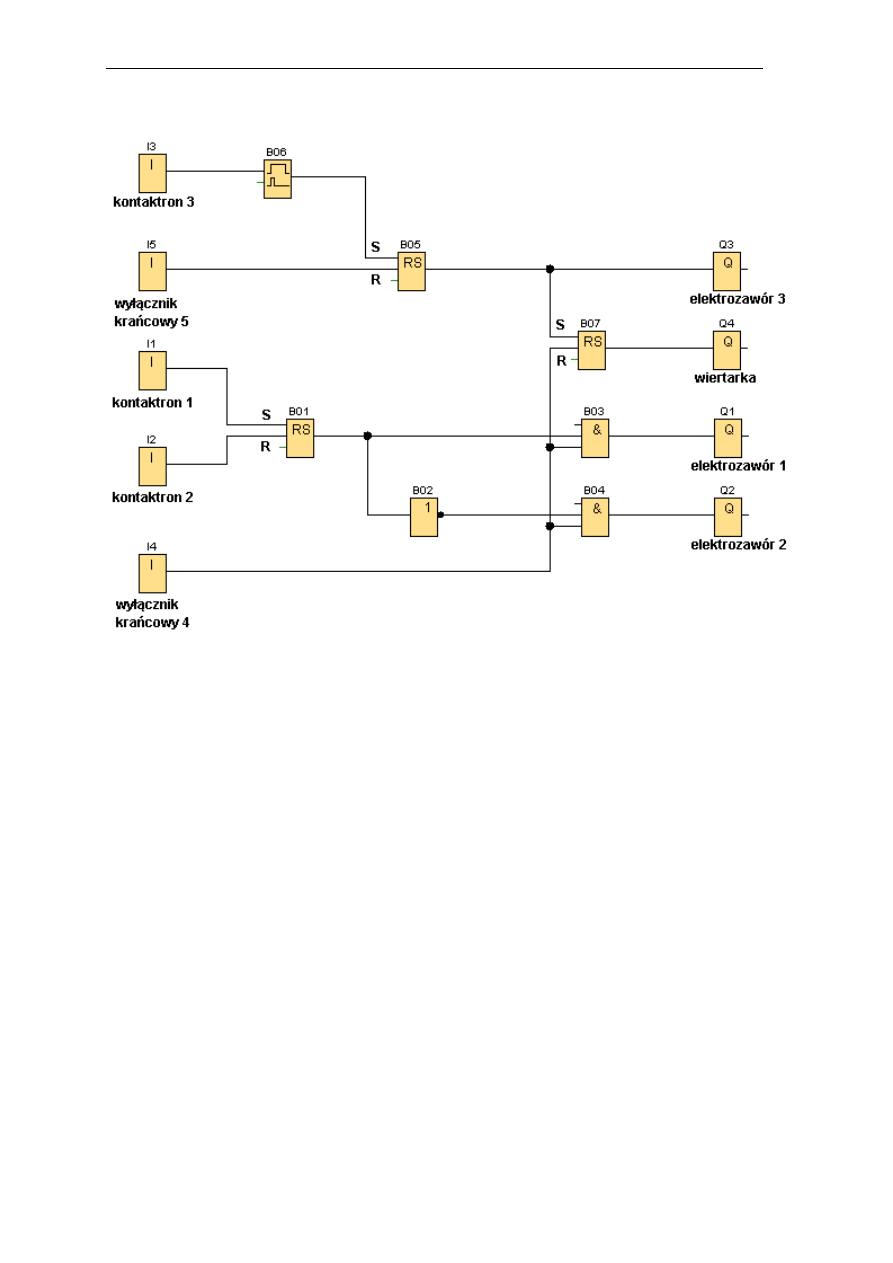
3.7 Zaprogramować sterownik LOGO zgodnie ze schematem rys. 5.
- uruchomić sterownik i dokładnie obserwować czynności wykonywane i sygnalizowane
przez układ
- wyjaśnij rolę krańcówki I4
- dlaczego
następuje zatrzymanie tłoka siłownika w pozycji „środkowej”?
- jaki element odpowiada za blokadę równoczesnego ruchu tłoków siłowników?
- gdzie i kiedy jest formowany sygnał dla wysunięcia formatki?
- dlaczego przy powrocie tłoka siłownika wiertarka ponownie wierci otwór?
3.8 Zmodernizować schemat z rys. 6 tak aby nie następowało wiercenie otworów przy
powrocie siłownika 1.
Pracownia Automatyki Katedry Tworzyw Drzewnych Ćwiczenie 11 str.10/10
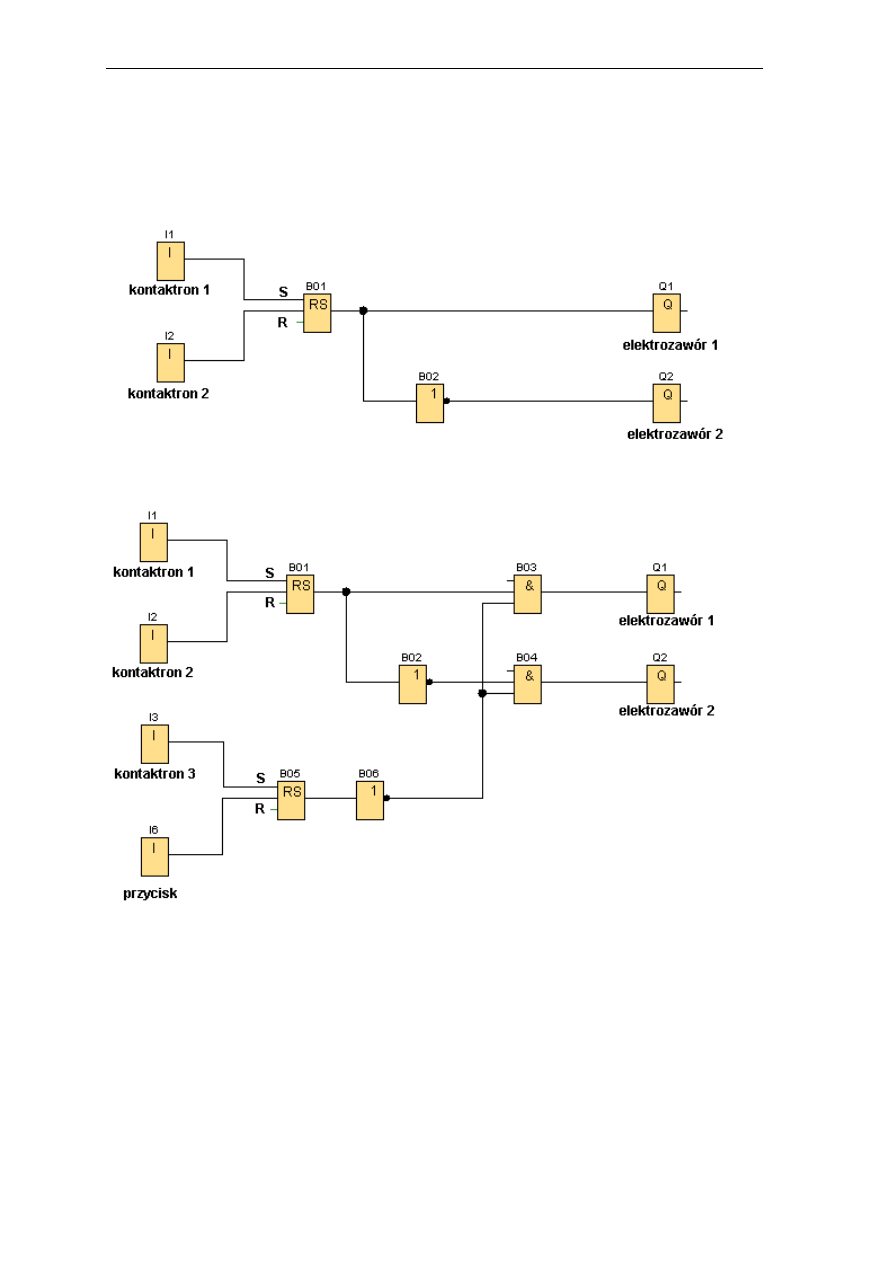
3.8 Schematy:
Rys.1. Praca siłownika posuwu formatki w obu kierunkach.
Rys.2. Praca siłownika posuwu formatki z zatrzymaniem.
Pracownia Automatyki Katedry Tworzyw Drzewnych Ćwiczenie 11 str.11/11
Rys. 3. Praca siłownika posuwu wiertarki.
Rys. 4. Praca siłownika posuwu wiertarki z włączaniem obrotów.
Pracownia Automatyki Katedry Tworzyw Drzewnych Ćwiczenie 11 str.12/12
Rys. 5. Praca obu siłowników.
Wyszukiwarka
Podobne podstrony:
fcs lab 11 id 169062 Nieznany
Fizjologia Cwiczenia 11 id 1743 Nieznany
Biologia Cwiczenia 11 id 87709 Nieznany (2)
CCNA4 lab 3 3 2 pl id 109125 Nieznany
moje wykresy 11 id 306777 Nieznany
G2 PB 02 B Rys 3 11 id 185401 Nieznany
III CZP 33 11 id 210275 Nieznany
mat bud cwicz 10 11 id 282450 Nieznany
grupa 11 id 441853 Nieznany
24 11 id 30514 Nieznany (2)
mnozenie do 25 11 id 304283 Nieznany
Lab nr 3 id 258529 Nieznany
cwiczenie 11 id 125145 Nieznany
CCNA4 lab 4 3 7 pl id 109128 Nieznany
ort wiosna 11 id 340445 Nieznany
lab 04 id 257526 Nieznany
K 118 11 id 229276 Nieznany
Chemia 11 3 id 111768 Nieznany
cw2 11 id 123042 Nieznany
więcej podobnych podstron