
Adaptacja sieci CAN BUS do zastosowao w systemach elektronicznych
jednostek pływających.
Andrzej Piętak
University of Warmia and Mazuria in Olsztyn
Faculty of Technical Sciences
Chair of Mechatronics
46 A, Słoneczna Str. 10-710 Olsztyn, POLAND
Tel.: +48 89 524 51 00,
e-mail: apietak@uwm.edu.pl
Maciej Mikulski
University of Warmia and Mazuria in Olsztyn
Faculty of Technical Sciences
Chair of Mechatronics
46 A, Słoneczna Str. 10-710 Olsztyn, POLAND
Tel.: +48 89 524 51 00,
e-mail: maciej.mikulski@uwm.edu.pl
Streszczenie
W pracy zaprezentowano analizę wykorzystania bazującego na sieci CAN, nowego standardu w elektronice
morskiej – NMEA 2000, w systemach statkowych, w kontekście małych, motorowych i żaglowych jednostek
rekreacyjnych. Idea i rozwój systemu zostały krótko przedstawione w pierwszych rozdziałach. Przedyskutowano
właściwości sieci CAN i ich wykorzystanie w systemie proponowanym przez NMEA. Dyskusję przeprowadzono
dla wszystkich warstw protokołu komunikacyjnego, zgodnie z opracowanym przez ISO modelem OSI (Open
Systems Interconnection Reference Model). Ostatecznie omawiane własności przeanalizowano pod kątem
możliwego wykorzystania w różnych segmentach pokładowych systemów statkowych.
1. Wprowadzenie
W początkowej fazie rozwoju elektroniki statkowej każde urządzenie było jednostką całkowicie
niezależną. Przyrządy, takie jak log elektroniczny, echosonda czy żyrokompas, wykonywały własne zadania i
nie były podłączone do innych instrumentów. Wraz z rozwojem nowych technologii szybko okazało się, że
konieczne jest, aby poszczególne urządzenia mogły się ze sobą komunikować. Wprowadzenie autopilota
wymagało sygnału z żyrokompasu itd. Niektórzy producenci wprowadzili własne systemy łączenia urządzeń
[1,2]. Wraz z rozwojem technik cyfrowych oczywista stała się potrzeba standaryzacji protokołu
komunikacyjnego wykorzystywanego przez urządzenia nawigacyjne. Przełom przyszedł w roku 1980, kiedy
amerykańskie stowarzyszenie producentów elektroniki morskiej NMEA (National Marine Electronics
Association) wprowadziło standard NMEA0180. Przez kolejne lata standard ten był ulepszany. Wprowadzony w
1983 roku standard NMEA0183 zawierał radykalne zmiany w systemie, co umożliwiło wzajemną komunikację
pomiędzy właściwie każdym urządzeniem elektroniki statkowej, a także łatwą wymianę danych z komputerem
PC. Standard NMEA0183 przeszedł w przeciągu lat znaczącą ewolucję, dodawane były możliwości obsługi
nowych urządzeń.
Pod koniec lat dziewięćdziesiątych obowiązujący standard okazał się niewystarczający. NMEA0183 w
samych założeniach zapewniała szeregowe przesyłanie danych tylko z jednego nadajnika do kilku urządzeń
odbiorczych (tzw. „słuchaczy”). Postępująca silna integracja systemów pokładowych sprawia, że nowoczesny
morski sprzęt elektroniczny potrzebuje danych z wielu źródeł. Bez standardu sieciowego, który zapewniłby taką
integrację danych, producenci sprzętu muszą zapewnić po kilka wejść lub stosować rozwiązania, które łączą

dane z kilku urządzeń nadawczych w jeden kanał. Pierwsze rozwiązanie wiąże się ze wzrostem kosztów i
dodatkową komplikacją okablowania. Protokół NMEA0186 z kolei, operując z prędkością 4800 bit/s, jest zdolny
do dostarczenia w przybliżeniu 10 zdań na sekundę, co w zupełności wystarcza, gdy nadaje jedno urządzenie, ale
zawodzi w przypadku, gdy układ zaczyna łączyć dane.
Odpowiedzią na rosnące wymagania, dotyczące łączenia i wymiany danych pomiędzy elektronicznymi
urządzeniami na statku, było opracowanie w 2001 roku przez National Marine Electronics Association nowego
standardu szeregowej komunikacji sieciowej – NMEA 2000, wykorzystującego układy scalone sieci CAN
(Contorled Area Network). CAN został opracowany pierwotnie dla przemysłu samochodowego, ale - ze względu
na łatwą dostępność i niską cenę komponentów - jest obecnie wykorzystywany w wielu aplikacjach
przemysłowych. Standard zdobywa coraz większą popularność. Renomowani producenci sprzętu nawigacyjnego
zaczynają wprowadzać na rynek produkty, które są przygotowane do pracy w sieci NMEA 2000. Pojawiają się
także pierwsze aplikacje standardu, nie tylko w rozbudowanych systemach pokładowych dużych statków, ale
także w projektach systemów nawigacyjnych i napędowych małych jednostek rekreacyjnych. Mimo rosnącego
zainteresowania ze strony producentów urządzeń morskich, wiedza na temat nowego systemu wydaje się mało
rozpowszechniona, szczególnie jeżeli chodzi o zastosowania w przemyśle jachtowym. Bardzo ubogo
przedstawia się także literatura na temat samego standardu, jak i możliwości zastosowania znanej technologii
magistrali CAN w systemach elektronicznych małych jednostek pływających. Rozsądne więc wydaje się szersze
omówienie obydwu systemów (NMEA 2000 oraz CAN BUS) i zbadanie zasadności wykorzystania ich,
zwłaszcza w aspekcie motorowych i żaglowych jednostek rekreacyjnych.
2. Standard NMEA 2000
NMEA 2000 to tania sieć komunikacji szeregowej, operująca z prędkością 250 kbit/s wykorzystująca
układy scalone sieci CAN. Podstawową różnicą pomiędzy NMEA 2000, a wcześniejszym standardem
NMEA0183 ( poza prędkością transmisji, 4.7 kbit/s dla NMEA0183) jest fakt, że pierwszy określa całą sieć
wymiany danych, a drugi jest tylko protokołem komunikacyjnym. Sieć NMEA 2000, w przeciwieństwie do
wcześniejszych standardów, pozwala na połączenie wielu urządzeń elektronicznych poprzez wspólny kanał
komunikacyjny, w którym kilka urządzeń może transmitować dane jednocześnie. Podobnie jak NMEA0183,
NMEA 2000 wprowadza standardowe definicje i formaty komunikatów, ale dodatkowo zapewnia obszerniejsze
zasady zarządzania siecią, identyfikacji urządzeń, wysyłania komend i odbierania danych. Jak w każdej aplikacji
sieciowej, połączenie między węzłami odbywa się za pomocą jednego kabla, co znacząco upraszcza i obniża
koszty instalacji w przypadku rozbudowanych systemów. Dane w systemie są przesyłane w postaci serii tzw.
„ramek” (ang. data frames), z zarezerwowanymi bitami w celu identyfikacji, wykrywania błędów i
potwierdzenia odbioru wiadomości. Każda ramka składa się z 8-bajtowej przestrzeni danych i 29-bitowego pola
identyfikacji, które określa priorytet wiadomości oraz identyfikuje element nadawczy i docelowy w sieci.
Ponieważ tylko niewielka część ramki przeznaczona jest dla danych, standard przeznaczony jest głównie do
przesyłu krótkich wiadomości, jednak z dużym stopniem niezawodności, dzięki zaawansowanej kontroli błędów.
Wiadomości mogą być przesyłane okresowo, wysyłane przy konkretnym warunku lub na żądanie
poszczególnych odbiorników.
Zgodnie z opracowanym przez ISO modelem OSI [3] (Open Systems Interconnection Reference Model - model
odniesienia łączenia systemów otwartych), standard NMEA 2000 definiuje wszystkie warstwy (model OSI
bazuje na siedmio-warstwowej organizacji protokołu komunikacyjnego) niezbędne do poprawnego działania
standardu sieciowego, zgodnie z przyjętymi założeniami. Najważniejsze komponenty sieci NMEA 2000 zebrano
w poniższej tabeli.
Tab. 1. Elementy sieci NMEA 2000, z wyróżnieniem na warstwy według modelu ISO/OSI, na podstawie [3],[4].
Warstwa Fizyczna
w pełni zdefiniowana w standardzie, normuje rodzaj przewodów i
konektorów, charakterystykę sygnałów itp.;
Warstwa Łącza Danych
Zdefiniowana przez Normę ISO 11783-3 z dodatkowymi
wymaganiami zawartymi w standardzie NMEA 2000;
Warstwa Sieciowa
Obecnie nie sprecyzowana w standardzie NMEA 2000, zostanie
zdefiniowana w przyszłych wersjach standardu;
Zarządzanie Siecią (obejmuje warstwy
transportową, sesji i prezentacji
według modelu OSI)
Zdefiniowana przez normę ISO 11783-5 z dodatkowymi
wymaganiami zawartymi w standardzie NMEA 2000;
Warstwa Aplikacji
W pełni zdefiniowana w standardzie NMEA 2000
Najważniejsze własności sieci NMEA 2000 wynikające z przyjętych norm i definicji zebrano w poniższej tabeli:
Tab. 2. Tabela charakterystyki sieci, zgodnie z[5].
Charakterystyka sieci
Architektura
Okablowanie magistralowe wykorzystujące 4-przewodową skrętkę (ang.
twisted-pair cabel), do zasilania, przesyłu danych i funkcjonowania
interfejsu.
Sieć liniowa z pojedynczym kablem szkieletowym, poszczególne węzły
dołączane są do magistrali za pośrednictwem krótkich kabli interfejsu
AUI.
Funkcjonowanie
Dostęp do sieci: wykrywanie podnośnej/wielodostęp/przyznawanie
dostępu rozstrzygane prze kontroler sieci CAN.
Sieć typu Multi-master (bark centralnego węzła kontrolnego).
Samo-konfigurująca.
Specjalne narzędzia sieciowe, pożądane dla celów diagnostycznych, nie są
konieczne przy funkcjonowaniu sieci.
Rozmiary
Fizyczne węzły: maksymalnie do 50 połączeń.
Węzły funkcjonalne: maksymalnie do 252 adresów sieciowych.
Długość sieci: do 200 m (przy prędkości przesyłu 250 kbit/s).
3. Magistrala CAN Bus jako podstawa warstwy fizycznej sieci NMEA 2000
Warstwa fizyczna definiuje mechaniczne i elektryczne aspekty połączenia pomiędzy elementami sieci.
Część mechaniczna warstwy fizycznej sieci (tj. rodzaje kabli i sposób ich łączenia) jest w pełni opisana przez
normę NMEA 2000 i nie stanowi przedmiotu niniejszej pracy. Charakterystyka elektryczna warstwy fizycznej,
może być ujęta w następujących punktach:
Dostęp do mediów kontrolowany jest przez standard CAN, zdefiniowany jak w normie ISO 11898;
CAN wykorzystuje dominująco/recesywną transmisję bitu;
Opóźnienia czasowe i obciążenie sieci ograniczają częstotliwość przesyłu bitu i długość kabla
szkieletowego;
Metoda LVDS znacząco poprawia odporność transmisji na zakłócenia;
Jednopunktowe zasilani i sygnał odniesienia kontroluje napięcie uziemienia i redukuje RFI
Sieć CAN została opracowana przez firmę Bosch w drugiej połowie lat 80-tych. Po szeregu zmian
specyfikacja sieci CAN ujęta w standard ISO1898 stała się normą międzynarodową do zastosowań w pojazdach.
Kontrolery tej sieci, dzięki zastosowaniu w wielkiej liczbie w branży motoryzacyjnej, są dostępne po znacznie
korzystniejszej cenie, niż większość układów ASIC stosowanych do sterowania magistral systemów pomiarowo-
kontrolnych (takich jak np. Profibus). Dlatego CAN jest powszechnie stosowany także w automatyce
przemysłowej, jako magistrala do komunikacji z czujnikami i aktuatorami. Liczne zalety tego standardu
spowodowały także jego wykorzystanie w sieciach statkowych.
Sieć CAN jest magistralą liniową zorientowaną bitowo. Stosuje metodę CSMA/CA dostępu do
magistrali z unikaniem kolizji oraz błędów transmisji. Wymaga to czasu reakcji wszystkich sterowników nie
dłuższego, niż czas przesyłu jednego bitu. Nakłada to znaczące ograniczenia na długość magistrali, która musi
spełniać warunek:
(3.1)
Gdzie L- długość magistrali [m], C
l
-współczynnik proporcjonalności (wartość w zakresie od 40 do 50 w
zależności od źródeł), K - szybkość transmisji [Mbit/s].
Ponieważ wszystkie urządzenia CSMA/CA na magistrali muszą pracować z tą samą prędkością , a przy
długich liniach mogą powstawać różnice w wyniku opóźnień w nadajniku/odbiorniku lub wzmacniaczu sygnału
w linii transmisyjnej, długość magistrali musi być tym mniejsza im większa szybkość transmisji. Zależność ta,
opisana równaniem (3.1), jest dobrana empirycznie. W standardzie NMEA 2000 szybkość transmisji sieci CAN
ustawiono na 250 kbit/s, co odpowiada 200 – metrowej długości magistrali.
Metoda szybkiej transmisji poprzez kable miedziane o niskiej amplitudzie, mocy i małych zakłóceniach
(LVDS), bazuje na fakcie, że magistrala CAN musi być na obu końcach zamknięta rezystorami dopasowującymi
(terminatorami) o wartości zależnej od impedancji kabla. Nadajnik przesyła mały prąd zależny od wartości
logicznej, która ma być przesłana jednym przewodem (zwykle 3,5 mA dla logicznej jedynki). Po przejściu przez
rezystor końcowy sygnał wraca w przeciwnym kierunku. Odbiornik mierzy różnicę napięć w obydwu
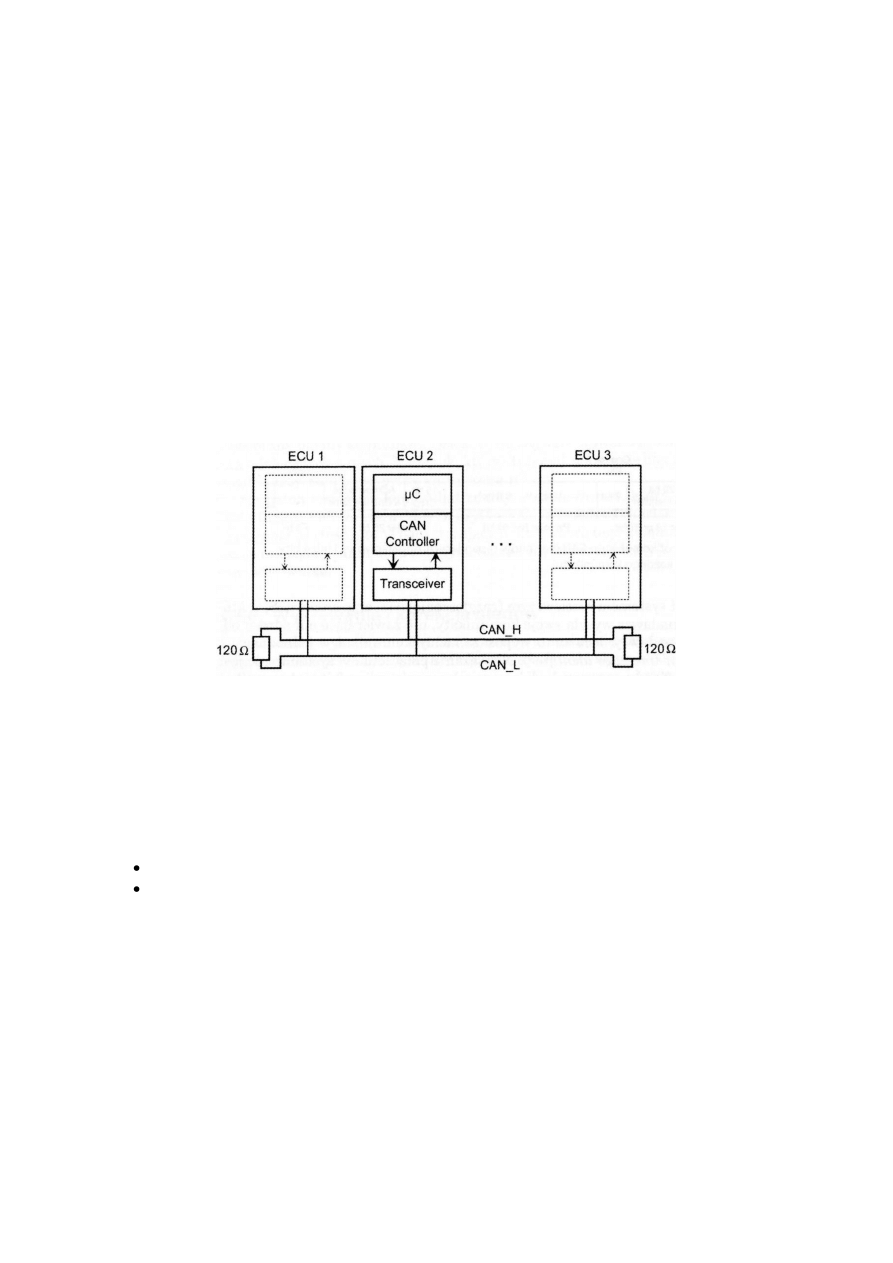
przewodach względem wspólnego sygnału odniesienia, aby wyznaczyć stan logiczny. Układ typowej sieci
opartej na magistrali CAN przedstawiono na Rysunku 1. Mała amplituda sygnału oraz silne sprzężenie pola
elektrycznego i magnetycznego pomiędzy parą przewodów powodują, że emisja szumu elektromagnetycznego
(oraz straty energii) jest bardzo mała.
Rys. 1 Układ typowej sieci opartej na magistrali CAN
LVDS wymaga zasilanych interfejsów sieciowych oraz wspólnego sygnału odniesienia dla wszystkich
węzłów sieci. Dwie linie sygnałowe przenoszą sygnały różnicowe mierzone względem wspólnego sygnału
odniesienia. W sieci CAN występują dwa uzupełniające się poziomy logiczne: "dominujący" (ang. dominant)
lub "ustępujący" (ang. "recessive"). Podczas jednoczesnej transmisji bitu "dominującego" i "ustępującego",
przez dwa różne urządzenia, otrzymamy w rezultacie poziom "dominujący". Umownie oznacza się poziom
"dominujący" jako 0, a poziom "ustępujący" jako 1. Poziom 0 ma wyższy priorytet niż poziom 1. Norma ISO
11898 precyzuje poziom poszczególnych stanów:
Stan dominujący: CAN_H = 3,5V, CAN_L = 1,5V, V
diff
= CAN_H - CAN_L =2,0 V
Stan recesywny: CAN_H = 2,5V, CAN_L = 2,5V, V
diff
= CAN_H - CAN_L =0,0 V
Niskie napięcie różnicowe powoduje, że system zużywa bardzo mało energii w porównaniu z innymi
rozwiązaniami, co jest nie bez znaczenia zwłaszcza w przypadku jednostek żaglowych. Standard pozwala także
na używanie typowych 12-Voltowych akumulatorów jachtu do zasilania całej sieci, gdy kabel szkieletowy i
liczba węzłów jest dostatecznie mała. W przypadku większych instalacji, można użyć kilku źródeł napięcia.
Zasilanie może być dostarczane przez kabel magistrali lub oddzielnym przewodem (dedykowana skrętka dwu-
przewodowa). Taka opcja umożliwia pobór dodatkowego prądu przez urządzenie z minimalną komplikacją
interfejsu. W obydwu przypadkach zasilanie i sygnał odniesienia dla obwodów interfejsu nie mogą mieć
bezpośredniego połączenia z obwodem zasilania lub uziemieniem urządzenia w sieci. Izolację można osiągnąć
na wiele sposobów. Najpopularniejszym sposobem jest stosowanie izolacji optycznej w urządzeniu pomiędzy
kontrolerem sieci CAN i pozostałymi obwodami. Sposób takiej izolacji zgodny z wymaganiami normy ISO
11898 przedstawiono na poniższym rysunku.
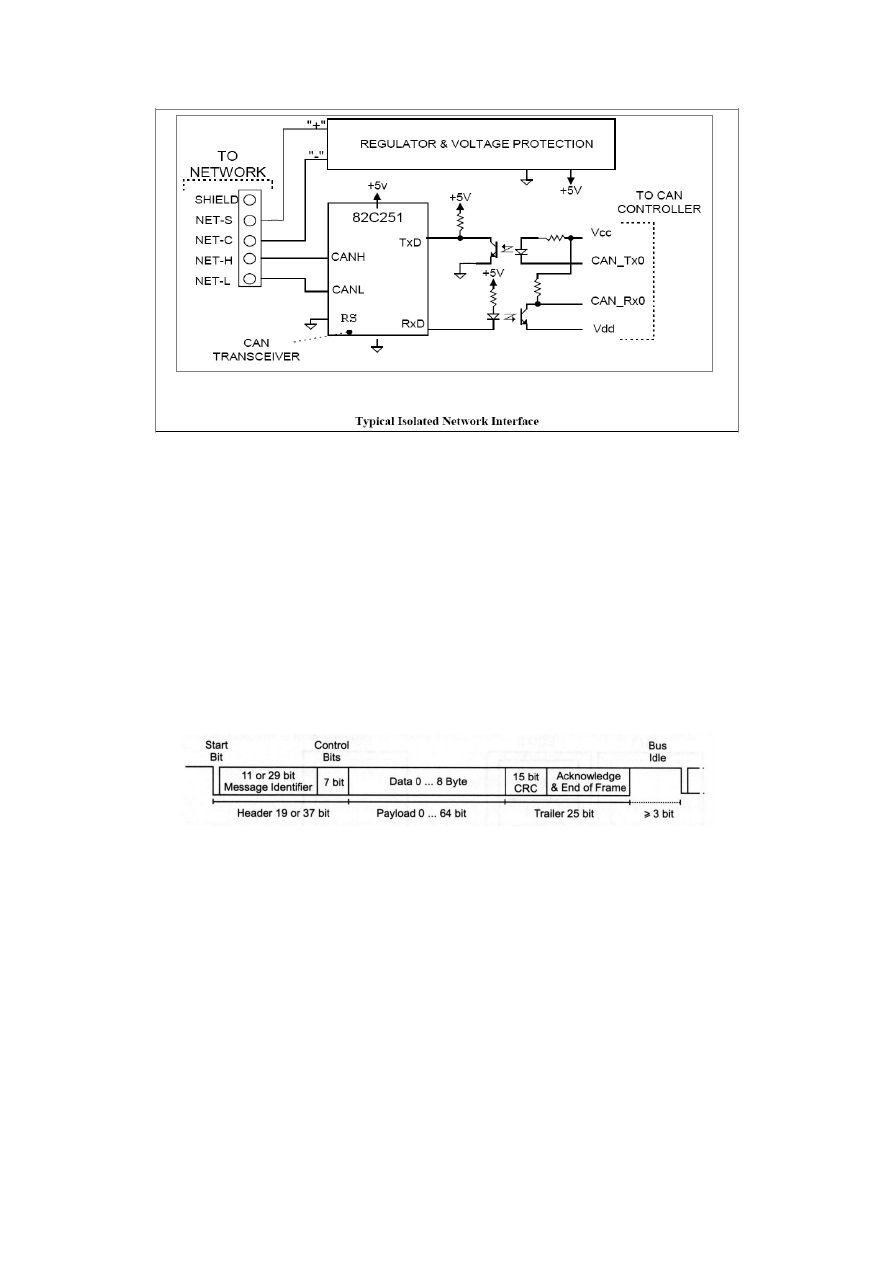
Rys. 2. Przykład izolacji optyczne między obwodami interfejsu a urządzeniami w sieci zgodny z normą ISO
11898 [6].
4. CAN w warstwie łącza danych
Podobnie jak w przypadku warstwy fizycznej, niektóre z własności warstwy łącza danych są
podyktowane przez wybór CAN, jako głównej magistrali sieci. NMEA 2000 w całości adoptuje
międzynarodowy standard warstwy łącza danych ISO 11783-3, który jest praktycznie identyczny ze standardem
SAE J1939-21 (specyfikacja CAN w samochodach ciężarowych, dostawczych i przyczepach). Dodatkowe
wymagania zawarte w NMEA 2000 zapewniają, że system lepiej radzi sobie ze specjalnym typem danych i
formatów przesyłanych przez urządzenia nawigacyjne oraz wspiera specyficzną konstrukcję tych urządzeń.
W warstwie łącza danych sieci NMEA 2000 główne funkcje interfejsu CAN to: generowanie
szeregowego strumienia bitów, kontrola dostępu do sieci oraz kontrola błędów i automatyczna retransmisja
wiadomości, przy której wystąpił błąd.
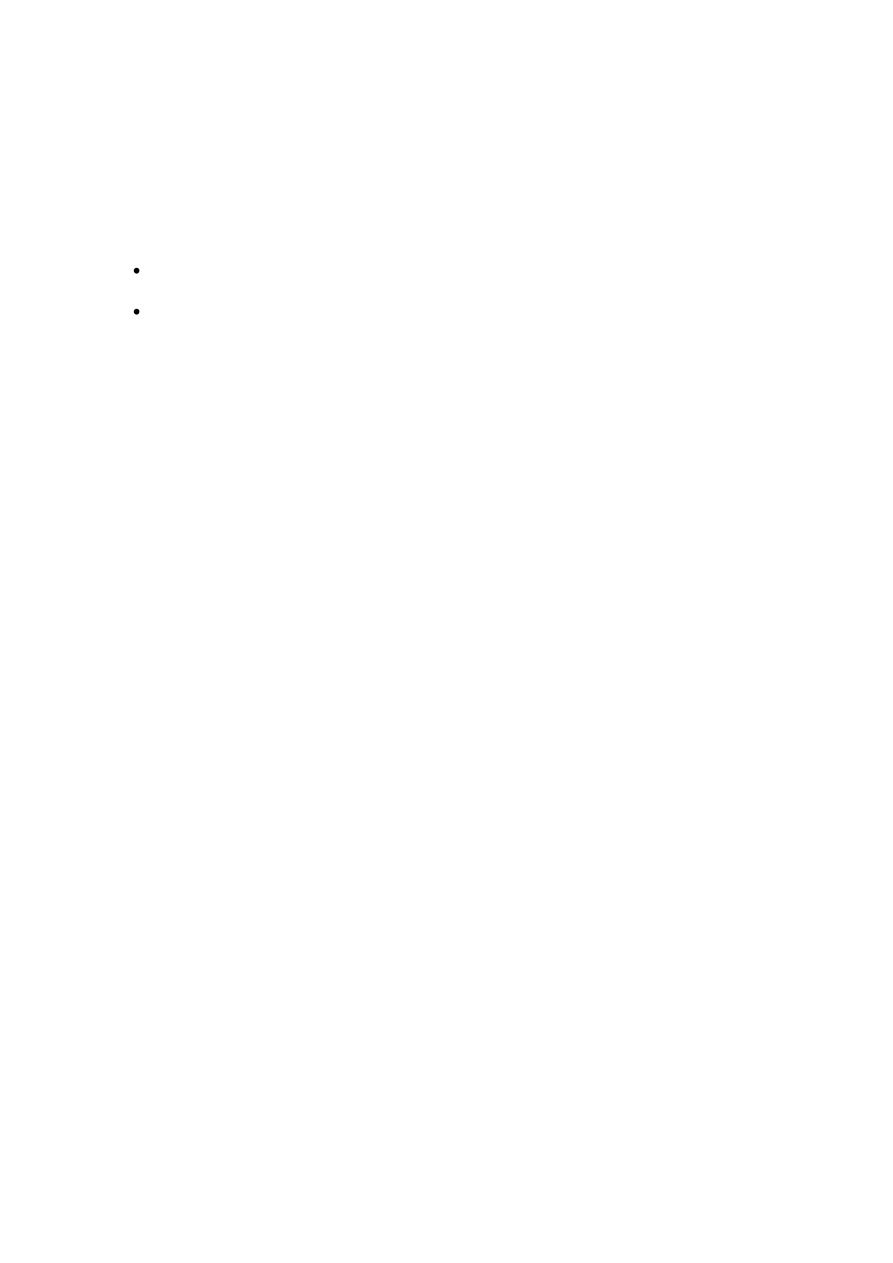
Rys. 3. Format komunikatu CAN (bez bitów separujących).
CAN jest systemem rozgłoszeniowym, w którym każdy nadawca wysyła swoje komunikaty. Każdy
sterownik w sieci odbiera wiadomość i na podstawie jej identyfikatora (Message identifier) decyduje, czy będzie
dane przetwarzał, czy je zignoruje. W obecnej specyfikacji CAN, 29-bitowe pole identyfikacji zawiera między
innymi adres nadajnika (konkretny adres lub adres globalny), rodzaj przesyłanych danych oraz informacje o
priorytecie. Gdy zachodzi kolizja między dwoma urządzeniami próbującymi wysłać dane przez magistralę, CAN
porównuje wysyłane dane bit po bicie i w ten sposób decyduje o przyznaniu dostępu, przy czym arbitraż
następuje w oparciu o priorytet wiadomości. Metoda ta nosi nazwę CSMA/CA +AMP (Carrier Sense Multiple
Access with Collision Avoidance + Arbitration on Message Priority) i ma tą przewagę nad standardowym
protokołem CSMA/CA, że nie generuje dużych strat czasowych.
Do celów kontroli błędów każda ramka zawiera tzw. wielomian korekcyjny CRC (cyclic redundancy
check), dzięki któremu odbiorniki synchronizują swoje generatory taktujące z nadajnikiem. Odbiornik, po
sprawdzeniu formatu i CRC ramki danych, wysyła potwierdzenie przyjęcia komunikatu za pomocą bitu ACK
(Acknowledge) i bitów końca komunikatu (End of Frame). W przypadku wykrycia błędu przez którykolwiek z
kontrolerów w sieci, wysyła on zgłoszenie błędu, co powoduje zignorowanie wadliwego komunikatu przez
wszystkie odbiorniki. Dzięki temu zagwarantowana jest zgodność danych w całej sieci. Nadajnik, który otrzymał
zgłoszenie błędu, natychmiast automatycznie retransmituje wiadomość, przy której błąd wystąpił. CAN
wykrywa także, kiedy dany węzeł generuje powtarzające się błędy i automatycznie wyłącza go z sieci dla
ochrony pozostałych elementów. Z badań [7] wynika, że stopa błędu transmisji w systemie CAN jest mniejsza
niż 10
-11
(procent błędów niewykrywalnych).
Standard NMEA 2000 w pełni wykorzystuje opisaną funkcjonalność sieci CAN, przy czym zadania jakie
nakłada na nią w warstwie łącza danych to głównie:
Zapewnienie metody transmisji danych, które są zbyt duże, aby zmieścić się w pojedynczej, 8-bitowej
ramce danych;
Definiowanie zestawu wiadomości dla wydawania komend urządzeniom w sieci (np. żądanie danych i
żądanie potwierdzenia).
CAN został pierwotnie zaprojektowany jako sieć transmisji między czujnikami i serwomechanizmami
oraz układem sterującym. Komunikacja taka nie wymagała przesyłu zbyt rozbudowanych wiadomości i 8-bitowa
ramka była w pełni wystarczająca. Ze względu na specyfikę urządzeń nawigacyjnych, wiele wiadomości w
systemie NMEA 2000 przekracza pojemność standardowej ramki danych kontrolera CAN. Aby poradzić sobie z
tym problemem, do transmisji wykorzystywana jest metoda szybkich pakietów (Fast-packet method),
umożliwiająca transmisje 223 bajtów danych z jednym identyfikatorem. Metoda polega na przesyłani sekwencji
ramek, z których pierwsza w całości zawiera dane o rozmiarze pakietu, licznik sekwencji do rozróżniania
wiadomości tego samego typu w pakiecie oraz licznik ramek. Każda dodatkowa ramka wykorzystuje 1 bajt
swojej przestrzeni dla danych do licznika zdarzeń i licznika ramek.
NMEA 2000 rozszerza możliwości, jakie daje standard ISO 11783-3, dostarczając nowy nie stosowany
dotąd w adaptacjach magistrali CAN typ wiadomości – tzw. rozkaz (Command), umożliwiający ustawienie
konkretnej wartości lub wywołanie określonego działania w urządzeniu odbierającym. Dodatkowo wiadomość –
żądanie, zdefiniowana w NMEA 2000, umożliwia ustawienie w urządzeniu nadawczym interwału czasowego
transmisji konkretnych danych. Dla przykładu - wiadomość zawierająca dane punktu drogi (ang. Waypoint),
składa się zwykle z pozycji, nazwy, numeru i symbolu tego punktu. Za pomocą żądania urządzenie może
wymusić nadanie informacji o danym „waypoincie” przez podanie dowolnie nazwy, numeru lub pozycji punktu.
5. Pozostałe warstwy sieci NMEA 2000
Procedury wykorzystywane w zarządzaniu siecią NMEA 2000 wynikają bezpośrednio ze standardu ISO
11783-5 (bazuje na SAE J1939-81). Zgodnie z wytycznymi, można w uproszczeniu opisać rolę tej warstwy jako
przydzielanie adresów i identyfikacja urządzeń w sieci oraz inicjalizacja systemu po włączeniu zasilania. Z
pośród 256 dostępnych w NMEA 2000 adresów sieciowych tylko adresy od 0-251 można przypisać
urządzeniom. Adres 255 jest adresem globalnym, używanym do przesyłania wiadomości do wszystkich
urządzeń i ze względu na charakter sieci (sieć rozsiewcza) jest najczęściej używany przy wysyłaniu wiadomości.
Pozostałe adresy zarezerwowane są do raportowani problemów lub zarezerwowane do użycia w kolejnych
wersjach standardu. W przeciwieństwie do dotychczasowych aplikacji CAN, wszystkie urządzenia zgodne z
NMEA 2000 muszą być samo-konfigurujące, czyli muszą być zdolne do samoczynnego pozyskania adresu przy
włączeniu systemu (urządzenia nie mają stałych adresów). Procedura przydzielania adresów wykorzystuje
zawartość pola danych wiadomości – żądania adresu, wysyłanego przez każde urządzenie przy starcie.
Wiadomość ta zawiera nazwę urządzenia, składającą się z numerów identyfikujących rodzaj sprzętu, producenta
oraz unikalnego numeru określającego konkretny egzemplarz. Przyznawanie adresu odbywa się zgodnie z
priorytetem nazwy. Wiadomość - żądanie zdefiniowana w warstwie łącza danych sieci NMEA 2000 może być
używana do wyszukiwania informacji o urządzeniach podłączonych w sieci, w celu budowy mapy całego
systemu dostępnej dla użytkownika. Dodatkową funkcjonalnością sieci jest możliwość wprowadzenia
komentarzy instalacyjnych przez wykonawcę, które mogą być transmitowane na żądanie. Warstwa aplikacji
definiuje składnie wszystkich wiadomości, jakie mają być przesyłane w sieci. Wszystkie wiadomości są
porządkowane w grupy parametrowe, które są identyfikowane przez numer PGN (parameter group number),
zawarty w polu identyfikacyjnym ramki CAN.
6. Analiza zakresu zastosowań magistrali CAN w sieciach statkowych
W dziedzinie statkowych systemów pokładowych zachodzi postępująca integracja układów. Zjawisko
to występuje w różnym stopniu na pokładach statków handlowych, kutrów rybackich czy jachtów rekreacyjnych.
Jednak, niezależnie od przeznaczenia, wielkości i poziomu złożoności zainstalowanych podsystemów potrzebna
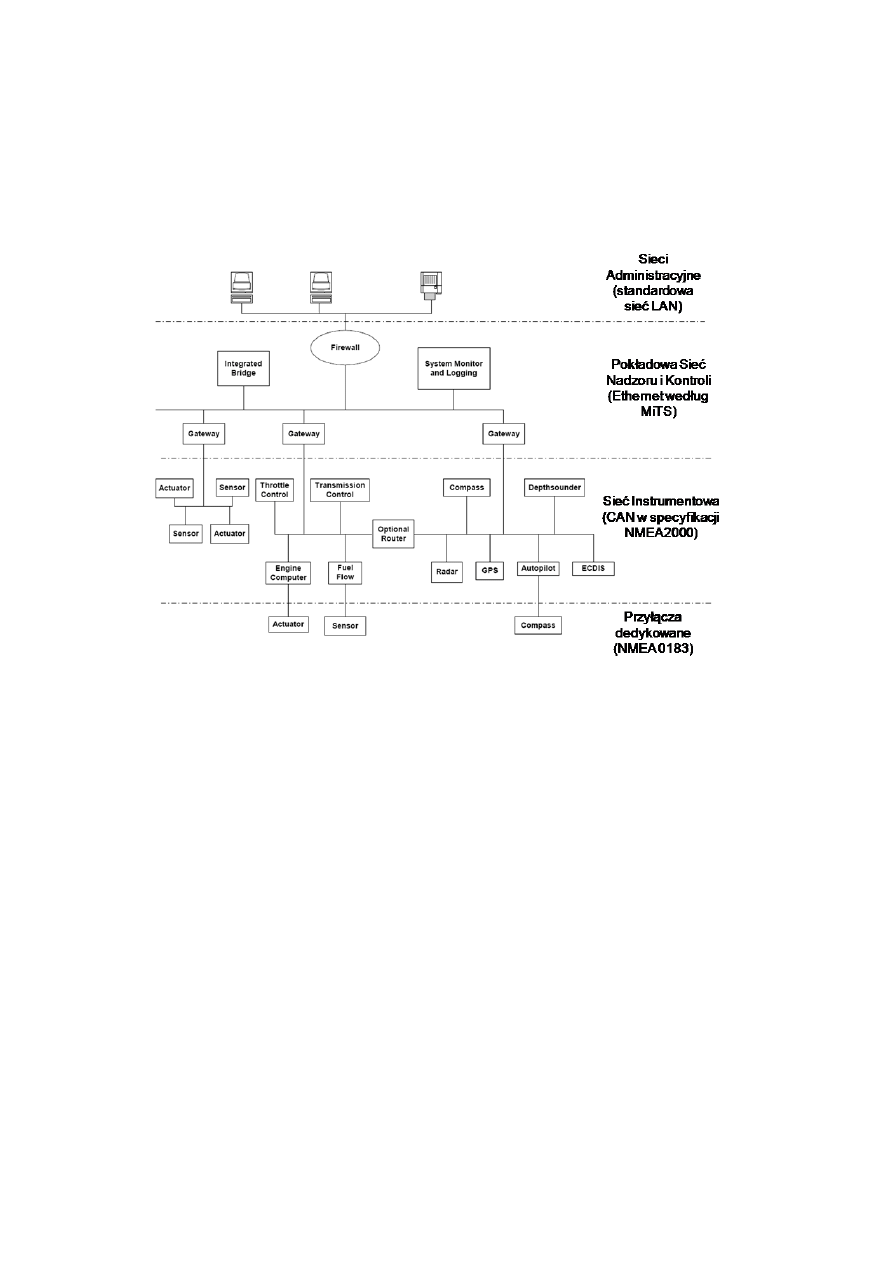
jest standaryzacja procesu wymiany danych, pomiędzy poszczególnymi urządzeniami tych jednostek. Ogólną
konfigurację statkowego systemu pokładowego ilustruje rysunek 4.
Rys. 4. Sieci i interfejsy statkowe[4].
Duże jednostki handlowe, ze względu na swoja specyfikę, posiadają rozbudowany system
administrowania danymi, takimi jak ilość i rozlokowanie ładunku itp. Często takie bazy danych muszą być
dostępne nie tylko z poziomu terminali rozlokowanych w różnych częściach statku, ale także, za pośrednictwem
systemów satelitarnych (np. IMMARSAT C), sprzężone z centralnym serwerem w biurze armatora. O ile system
administracyjny jest istotny, ze względu na efektywne zarządzanie statkiem, to jego sprawne działanie nie ma
jednak istotnego wpływu na bezpieczeństwo żeglugi. Nie jest on więc objęty ścisłymi regulacjami i ,ze względu
na wygodę użytkowników, został praktycznie całkowicie opanowany przez komputery klasy PC pracujące w
standardowej sieci LAN, zbudowanej w oparciu o powszechnie dostępne podzespoły.
Decyzje, które wpływają bezpośrednio na bezpieczeństwo statku i załogi, a także, co w ostatnich latach
szczególnie zyskało na znaczeniu, dotyczące bezpieczeństwa ekologicznego, podejmowane są zwykle na mostku
lub w innych centrach kontroli, będących częścią systemu zintegrowanego mostka. Aby efektywnie podejmować
takie decyzje oraz zagwarantować sprawne ich wdrożenie, kapitan i oficerowie potrzebują dostępu do danych z
wielu systemów statkowych (nawigacyjnego, maszynowni, kontroli przeciwpożarowej itp.). Specyfika
transportu morskiego oraz szczególne wymagania w zakresie niezawodności wykluczają wykorzystanie
tradycyjnej sieci LAN w tych systemach, mimo że wymagania odnośnie rodzaju i szybkości transmisji danych
są podobne. Duża ilość danych, która musi być przesyłana w systemie wspomagania decyzji, dyskwalifikuje
jednocześnie sieć CAN dedykowaną do przesyłu krótkich wiadomości z bardzo dużą niezawodnością.
Wymagania w zakresie komunikacji między podsystemami zintegrowanego mostka zostały unormowane przez
norweski Maritime Information Technology Standard (MiTS)[8]. Ten bazujący na protokole TCP/IP (sieć
Ethernet) system jest obecnie w fazie implementacji i testów. Przewiduje się wzrost zainteresowania sieciami
Ethernetowymi w warstwie nadzoru [5]. Świadczy o tym także, niedawne przyjęcie standard MiTS za podstawę
europejskiej normy IEC 61162-4.

Okazuje się jednak, że propagowane przez MiTS układy oparte na protokole TCP/IP, nie w pełni
odpowiadają wszystkim szczeblom komunikacji statkowej. Poszczególne podsystemy statku, takie jak
sterowanie maszynownią, czy system nawigacyjny, wykonują przeważnie ściśle określone funkcje i często
regulują procesy o stałej czasowej rzędu milisekund. Potrzebują więc systemu wymiany danych czasu
rzeczywistego. CAN jest takim systemem i w przeciwieństwie do sieci Ethernetowych jest deterministyczny.
Ponadto podsystemy maszynowe, nawigacyjne, czy kontrolne są zwykle bardziej autonomiczne i przenoszą
stosunkowo mało danych (krótkie komunikaty) w porównaniu do innych systemów statkowych. Sieć
dedykowana do komunikacji pomiędzy prostymi i, w związku z tym relatywnie niedrogimi aktuatorami i
sensorami, powinna cechować się znacznie niższym kosztem w przeliczeniu na węzeł niż inne sieci statkowe. Te
wszystkie wymagania sprawiają, że wybór niskokosztowej, dwukierunkowej i wielodostępowej sieci CAN, do
komunikacji w obrębie podsystemów jest w pełni uzasadniony.
7. Podsumowanie
Wymagania odnośnie pokładowych sieci komunikacyjnych są bardzo wysokie. Protokół CAN i oparta
na nim sieć NMEA 2000 potrafi sprostać tym wymaganiom, ale tylko w obrębie komunikacji między
poszczególnymi sensorami i aktuatorami. Niskie koszty komponentów i łatwość rekonfiguracji elementów sieci
z całą pewnością przyczynią się do utrzymania standardu w tym segmencie. Procedura usuwania błędów w sieci
CAN nie jest adaptacyjna, więc niekiedy zabiera więcej czasu niż w przypadku innych protokołów. Dopóki
sama detekcja błędów będzie ważniejszym priorytetem, niż ich usuwanie, tanie kontrolery CAN są naturalnym
rozwiązaniem. CAN był rozwijany przez ponad 17 lat i przewiduje się [9], że opracowanie jakiegokolwiek
rozwiązania, które mogłoby go zastąpić, zajęłoby tyle samo czasu.
Głównym ograniczeniem CAN w zastosowaniach statkowych wydaje się prędkość przesyłu, która jest
zależna od długości magistrali. Przemawia to znacząco na korzyść konkurencyjnego rozwiązania w postaci
standaryzowanych statkowych sieci LAN (MiTS), których rozwój w kierunku systemów czasu rzeczywistego
jest możliwy przy synchronizacji zegarów we wszystkich węzłach. Pojemność sieci NMEA 2000 da się z kolei
zwiększyć poprzez optymalizację organizacji sprzętu elektronicznego oraz transferu i formy danych, a w tym
kierunku powinny być prowadzone dalsze badania.
Warto zauważyć, że o ile w przypadku dużych statków stosowalność systemów CAN jest ograniczona do sieci
aktuator-sensor, to takiego rodzaju komunikacja jest dominująca na małych jednostkach żaglowych i
motorowych, operujących do tej pory na konwencjonalnym sterowaniu elektrycznym z ograniczony
wykorzystaniem protokołu NMEA 0183. Niskie koszty i uproszczenie instalacji elektrycznej, a także łatwe
wprowadzenie redundancji w przypadku systemów krytycznych (podwójna magistrala), czynią nowy standard
idealnym do wykorzystania w małych jednostkach. Pojawiają się już pierwsze aplikacje sieci NMEA 2000 w
jachtach motorowych [10], jednak wiedza na temat systemu nadal nie jest rozpowszechniona wśród zespołów
projektowych. Biorąc pod uwagę znaczący udział krajowych stoczni jachtowych w tym segmencie rynku,
wskazane wydaje się propagowanie tego rozwiązania wśród producentów i konstruktorów jako innowacji, która
może przełożyć się na wzrost konkurencyjności przedsiębiorstw. Wskazane są także dalsze badania nad
możliwością aplikacji standardu NMEA 2000 w jednostkach rekreacyjnych.
Literatura
1. SimNet Installation Manual 2004 Simrad AS.
2. SeaTalk Reference Manual 2007 Raymarine plc.
3. ISO standard 7498-1:1994 Information technology – Open Systems Interconnection – Basic Reference
Model: The Basic Model
4. F. Cassidy NMEA 2000 Explained - The latest word , 1999, Marine Electronics.
5. L. A. Luft, L. Anderson, F. Cassidy, NMEA 2000 A Digital Interface for the 21st Century, Institute of
Navigation’s National Technical, 2002 San Diego, California
6. National Marine Electronics Association (1999) NMEA 2000, version draft 4.1.
7. W. Zimmermann, R. Schmidgall, Bussysteme in der Fahrzeugtechnik, Vieweg & Sohn Verlag
Wiesbaden 2007.

8. Ø. Rødseth, Companion Standards for integrated ship control system, 1995, SINTEF Automatic Control
N-7034 TRONDHEIM Norway.
9. M. Törgren (1999) A perspective to the design of Distributed Real-time Control Applications based on
CAN.
10. L. Anderson, L. A. Luft , NMEA 2000 Applied. RTCM May 2002, St Petersburg, Fl. (updated 2006)
Wyszukiwarka
Podobne podstrony:
Adaptacja dziecka do przedszkol Nieznany (2)
4 Zalozenia wyjsciowe do wyceny Nieznany (2)
2 przesylanie argumentow do met Nieznany
cwiczenia praktyczne do Windows Nieznany
Od kultury wizualnej do teologi Nieznany
projekt sieci LAN z dostępem do Internetu
nom kol 2 odpowiedzi do pytan i Nieznany
08 wprowadzenie do programowani Nieznany
Przebicie LT wersja do druku i Nieznany
Konstytucyjne prawo do informac Nieznany
christmas zestaw cwiczen do ma Nieznany
20130908093258 sylabus do wykla Nieznany (2)
Dodatki i domieszki do betonu i Nieznany
EKON Zas Mat Przyg do spr 1 Nieznany
Das TFH CAN Bus Experimentalsystem
94 ROZ rzeczoznawcy do spraw Nieznany (2)
Instrukcja obslugi Stojak do be Nieznany
więcej podobnych podstron