I n s t y t u t a u t o m a t y z a c j i p r o c e s ó w t e c h n o l o g i c z n y c h i
z i n t e g r o w a n y c h s y s t e m ó w w y t w a r z a n i a
P o l i t e c h n i k i Ś l ą s k i e j w G l i w i c a c h
Podstawy Konstrukcji Maszyn
Typoszereg chwytaków
Szymon Góra
Wydział:
MT
Kierunek: AiR
Grupa:
3
Semestr:
IV
1

SPIS TREŚCI:
1. ZAŁOŻENIA I DANE DO PROJEKTU…………………………………………...3
•
OPIS ISTOTY DZIAŁANIA
•
DANE SYTUACYJNE
•
KRYTERIA
•
ZADANIA DO WYKONANIA
2. ROZWIĄZAZNIA
KONSTRUKCYJNE……………………………………………………….…….......5
3. WYBÓR ROZWIAZANIA KONSTRUKCYJNEGO METODA
PUNKTOWA……………………………………………………………………...…..7
4. USZCZEGÓŁOWIENIE I ZUNIFIKOWANIE ROZWIĄZANIA
KONSTRUKCYJNEGO…………………………………………………………..…9
5. OBLICZENIA SIŁY CHWYTU
PRZEDMIOTU…………………………………………….……………………..….9
•
MASA PRZEDMIOTU
•
RUCH PIONOWY
•
RUCH OBROTOWY
6. DOBÓR PRYZMY…………………………………………….……………….
…………...…11
7. DOBÓR SIŁOWNIKA……………………..………………….……………….
…………...…13
•
CHARAKTERYSTYKA PRZEŁOŻENIE-PRZEMIESCZENIE
•
CHARAKTERYSTYKA WYSÓW-PRZEMIESCZENIE
8. OBLICZENIA WYTRZYMAŁOŚCIOWE…………………………………….
…………………..17
•
DOBÓR PRZEKROJU RAMIENIA
•
OBLICZENIE POŁĄCZENIA SWORZNIOWEGO
9. LITERATURA……………………………………..………………………………..19
10. ZAŁĄCZNIKI……………………………………………………………………….20
2

1. ZAŁOŻENIA PROJEKTOWO – KONSTRUKCYJNE
Opracować uporządkowaną rodzinę konstrukcji w postaci typoszeregu chwytaków.
Podstawowe relacje realizowane przez chwytak to: uchwycenie, trzymanie i uwolnienie,
przemieszczenie obiektu. Sposób unieruchomienia obiektu zaś miał być siłowo – kształtowy,
za pomocą końcówek chwytnych.
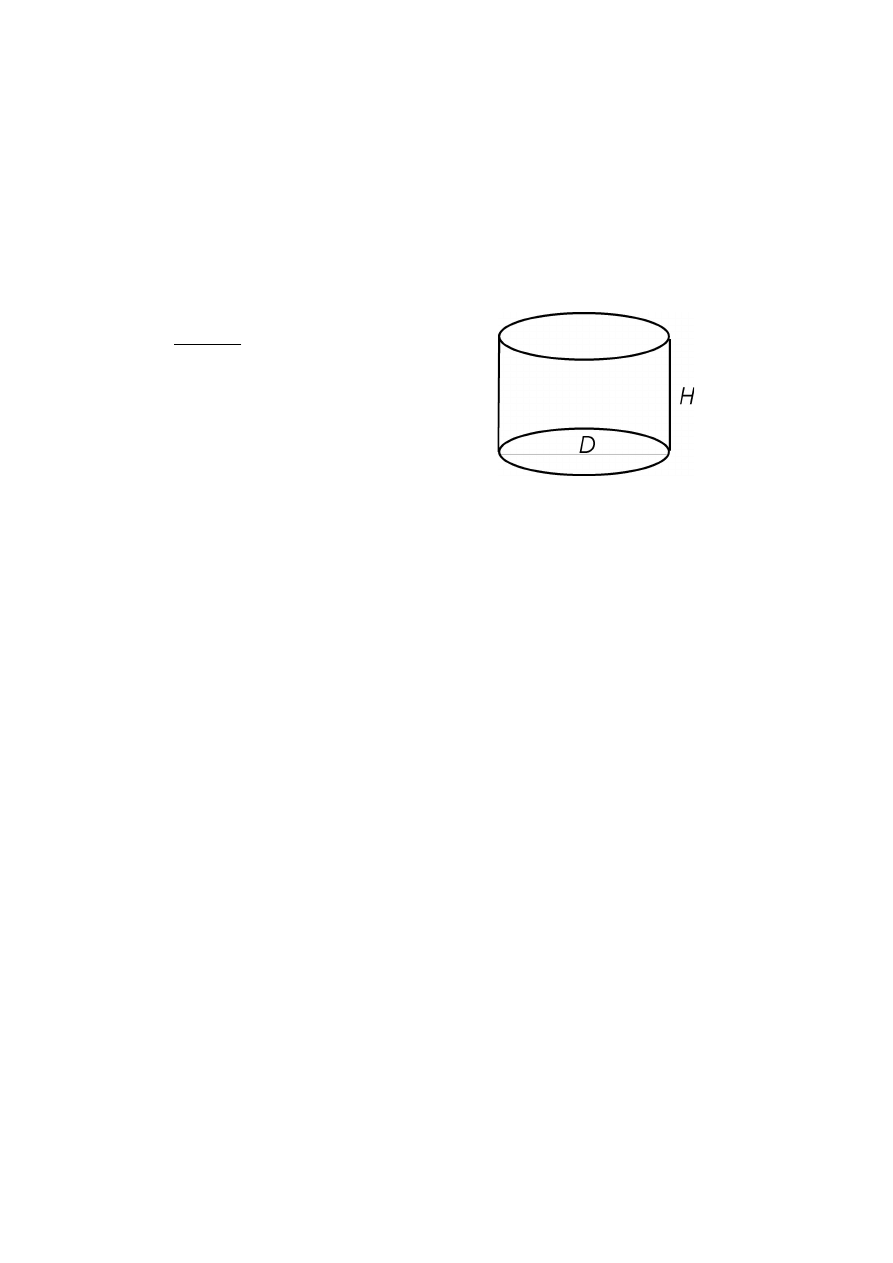
DANE ILOŚCIOWE:
Obiektami manipulowanymi są przedmioty w postaci walców, których zakresy
zmienności wartości dla tworzonego typoszeregu chwytaków są następujące:
rodzaj tworzywa:
stal
zakres zmienności średnic:
d
min
= 60 [mm]
d
max
= 80 [mm]
względne rozchylenie:
k = ±18 [%]
zakres zmienności długości:
H
min
= 50 [mm]
H
max
= 60 [mm]
maksymalny wysięg robota:
R = 2 [m]
maksymalna prędkość obrotowa:
1,5 [rad/s]
maksymalna prędkość liniowa:
Vr
= 1,2 [m/min]
KRYTERIA WYBORU NAJLEPSZEJ KONSTRUKCJI:
K1 - Maksymalna zwartość konstrukcji chwytaka,
K2 - Minimalna masa,
K3 - Minimalna liczba elementów,
K4 - Maksymalna liczba elementów dobranych (katalogowych, znormalizowanych),
K5 - Prostota montażu,
K6 - Prostota montażu chwytaków w kiści robota,
K7 - Zapewnienie prostoliniowości ruchu końcówek chwytnych,
K8 - Stabilna charakterystyka statyczna przemieszczeniowa i siłowa,
K9 - Stałość lub wzrost siły przy wzroście średnicy przemieszczanego obiektu,
ZADANIA DO WYKONANIA:
3

1. Przeprowadzić analizę literaturową oraz internetową
http://www.gemotec.com/
http://www.gimatic.com/
http://www.norgren.com/
http://www.schunk.com/home.html
2. Opracować pole możliwych rozwiązań chwytaków o ruchu kleszczowym
oraz imadłowym
3. Przeprowadzić optymalizację metodą punktową w zakresie:
⇒
układu napędowego
⇒
układu przeniesienia napędu
⇒
układu końcówek chwytnych
4.
Uszczegółowić wybrane rozwiązanie konstrukcyjne
5. Zunifikować cechy charakterystyczne chwytaka
6. Opracować wzorcową konstrukcje chwytaka z wyszczególnieniem
typowych postaci konstrukcyjnych elementów oraz układów wymiarów
7. Opracować graf relacji sprzężeń chwytaka
8. Przedstawić charakterystykę siłową i przemieszczeniową wzorcowej
konstrukcji chwytaka
9. Opracować algorytm a następnie program doboru ilościowych cech
konstrukcyjnych dla typowej postaci konstrukcyjnej, z zastosowaniem
operatorów: geometrycznych, wytrzymałościowych, elementów
dobieranych, procesu wytwórczego, podobieństwa konstrukcyjnego,
wymiarów sprzężonych
10.Wyszczególnić konstrukcje elementów i utworzyć ich rysunki katalogowe
11.Utworzy założenia wybranego chwytaka
12.Przeprowadzić symulacje działania chwytaka
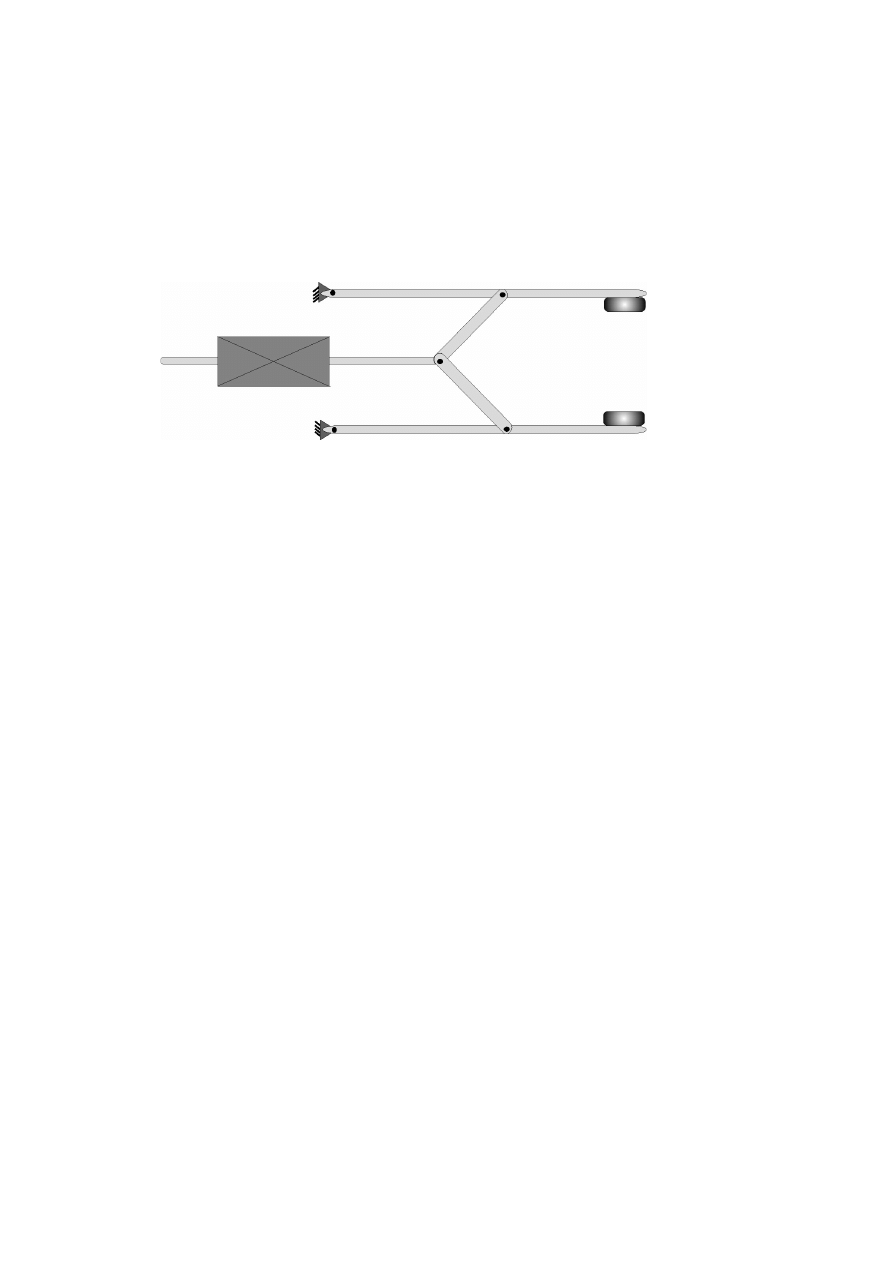
2. POLE ROZWIĄZAŃ KONSTRUKCYJNYCH
4
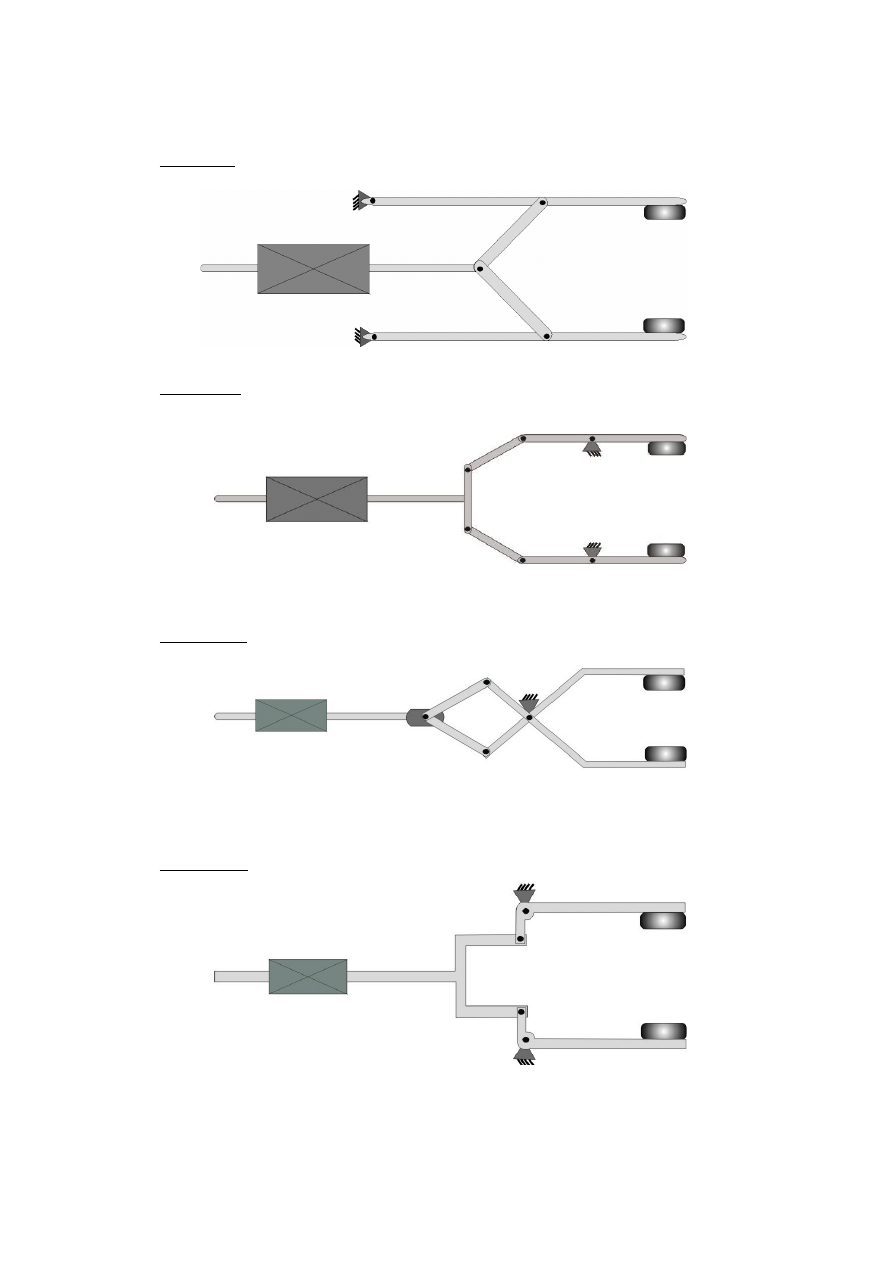
Wersja I :
Wersja II :
Wersja III :
Wersja IV :
5
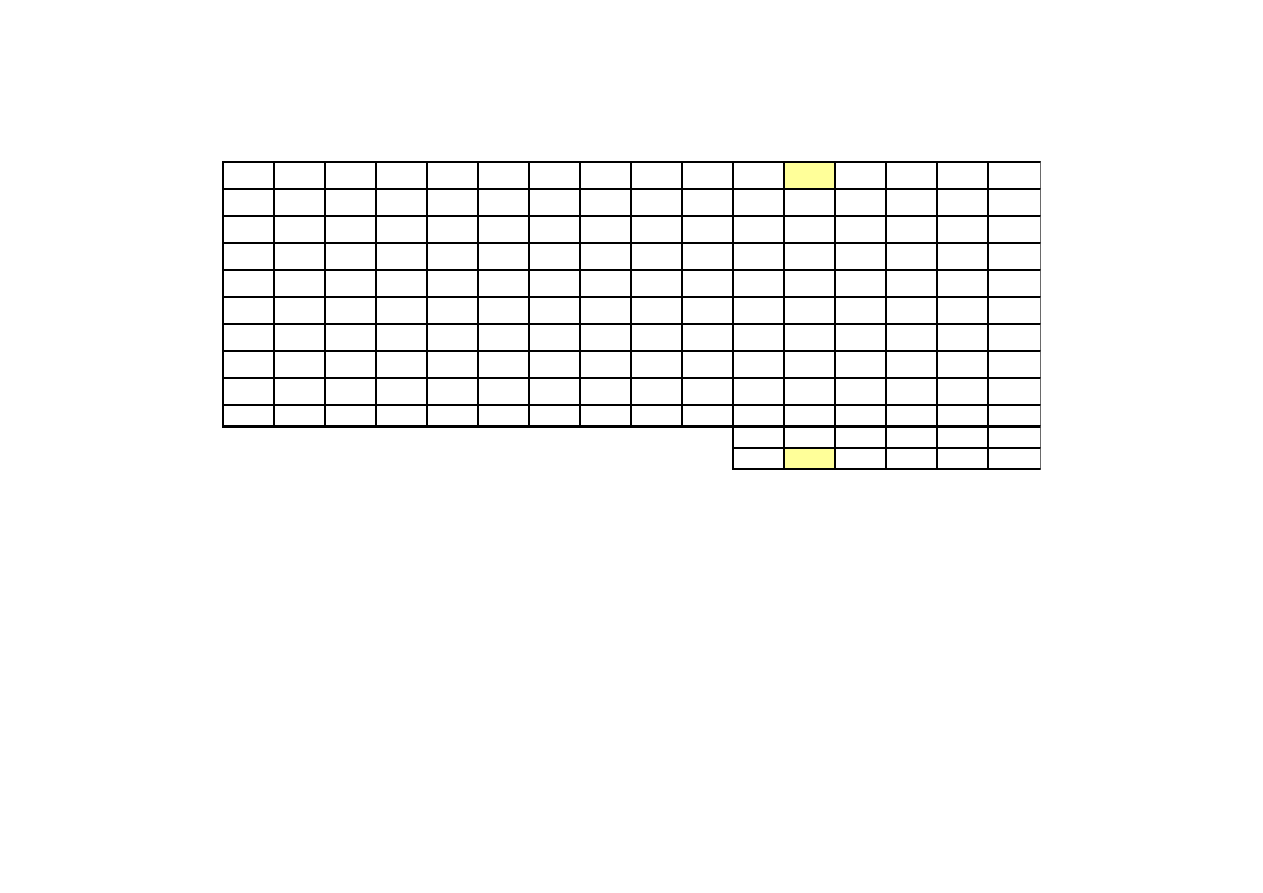
3. KRYTERIALNY WYBÓR ROZWIĄZANIA KONSTRUKCYJNEGO
K1 - Maksymalna zwartość konstrukcji chwytaka,
K2 - Minimalna masa,
K3 - Minimalna liczba elementów,
K4 - Maksymalna liczba elementów dobranych (katalogowych, znormalizowanych),
K5 - Prostota montażu,
K6 - Prostota montażu chwytaków w kiści robota,
K7 - Zapewnienie prostoliniowości ruchu końcówek chwytnych,
K8 - Stabilna charakterystyka statyczna przemieszczeniowa i siłowa
K9 - Stałość lub wzrost siły przy wzroście średnicy przemieszczanego obiekt
K1
K2
K3
K4
K5
K6
K7
K8
K9
∑
R1
R2
R3
R4
RI
K1
0,5
1
1
0,5
0,5
0,5
0,5
0,5
5
2
2
2
2
3
K2
0,5
0,5
0,5
0
0
0,5
0,5
0
2,5
3
2
1
2
3
K3
0
0,5
0,5
0
0
0
0,5
0,5
2
2
2
2
2
3
K4
0
0,5
0,5
0
0
0
0,5
0,5
2
2
1
2
2
3
K5
0,5
1
1
1
0
0
0,5
0
4
3
2
2
2
3
K6
0,5
1
1
1
1
0
0,5
0
5
3
3
2
2
3
K7
0,5
0,5
1
1
1
1
0,5
0,5
6
2
2
2
2
3
K8
0,5
0,5
0,5
0,5
0,5
0,5
0,5
0,5
4
3
2
2
2
3
K9
0,5
1
0,5
0,5
1
1
0,5
0,5
5,5
2
2
2
2
3
Z
87,5
75
69,5
72
108
%
81,02
69,44
64,35
66,67
100
6
Z analizy kryterialnej wynika, że najlepszym rozwiązaniem dla naszych kryteriów jest
koncepcja nr 1. Koncepcja ta uzyskała 81,02% koncepcji idealnej.
7

4. UNIFIKACJA CECH
CHARAKTERYSTYCZNYCH CHWYTAKA.
Unifikacja to ograniczenie i porządkowanie wartości cech charakterystycznych.
Jej wynikiem są zunifikowane wartości cech charakterystycznych.
Cechy charakterystyczne chwytaka to:
sposób zamocowania: przyjmuję, że chwytak będzie zamocowany do ramienia robota
poprzez kołnierz i śruby.
sposób zasilania: przyjmuję, że chwytak będzie napędzany przez siłownik
pneumatyczny dwustronnego działania.
sposób realizacji ruchów końcówek chwytnych: siłownik przez przeguby i sworznie
przekazuje siłę do końcówek chwytnych.
siła chwytu
rozstaw minimalny i maksymalny końcówek chwytnych
ciśnienie zasilania ( p=6 bar = 0,6 MPa)
8
d
2
*
Π * H
4
5. OBLICZENIE SIŁY CHWYTU
PRZEDMIOTU.
MASA OBIEKTU MANIPULOWANEGO:
Objętość obiektu:
V =
d
min
= 60
[mm]
d
max
= 80
[mm]
H
min
= 50
[mm]
H
max
= 60
[mm]
V
min
=Π * 6
2
* 5 / 4 = 141,28 [cm
3
]
V
min
=Π * 8
2
* 6 / 4 = 301,41 [cm
3
]
m = ρ * V
ρ = 7,8
[g/cm
3
] – dla stali
m
min
= 1,102 [kg]
m
max
= 2,351 [kg]
Maksymalna masa obiektu wynosi: m
max
= 2,351 [kg]
Minimalna masa obiektu wynosi:
m
min
= 1,102 [kg]
9
SIŁA CHWYTU:
1. RUCH PIONOWY
]
[
25
,
76
5
,
1
865
,
50
5
,
1
]
[
834
,
50
5
,
0
351
,
2
066
,
23
]
[
351
,
2
351
,
2
1
]
[
066
,
23
351
,
2
81
,
9
5
,
0
max
max
N
n
N
F
n
N
F
Q
N
F
Q
N
N
T
N
m
a
F
N
m
g
Q
pion
ch
b
b
b
=
⋅
=
⋅
>
=
=
+
=
+
≥
+
≥
⋅
⋅
=
=
⋅
=
⋅
=
=
⋅
=
⋅
=
=
−
µ
µ
µ
µ
2. RUCH OBROTOWY
F
ch
> max(F
ch1
, F
ch2
) = 76,456 [N]
T
a
G
F
b
G
F
ods
F
b
F
w
[ ]
[ ]
[ ]
N
F
n
F
N
F
F
Q
F
N
R
m
F
N
R
m
ma
F
w
obr
ch
odś
b
w
odś
b
494
,
78
]
[
485
,
25
581
,
10
351
,
2
2
2
2
2
=
⋅
>
=
+
+
=
=
=
=
=
=
−
µ
ω
ε
F
od –
siła odśrodkowa
F
ch-obr
– siła chwytu dla ruchu
obrotowego
10
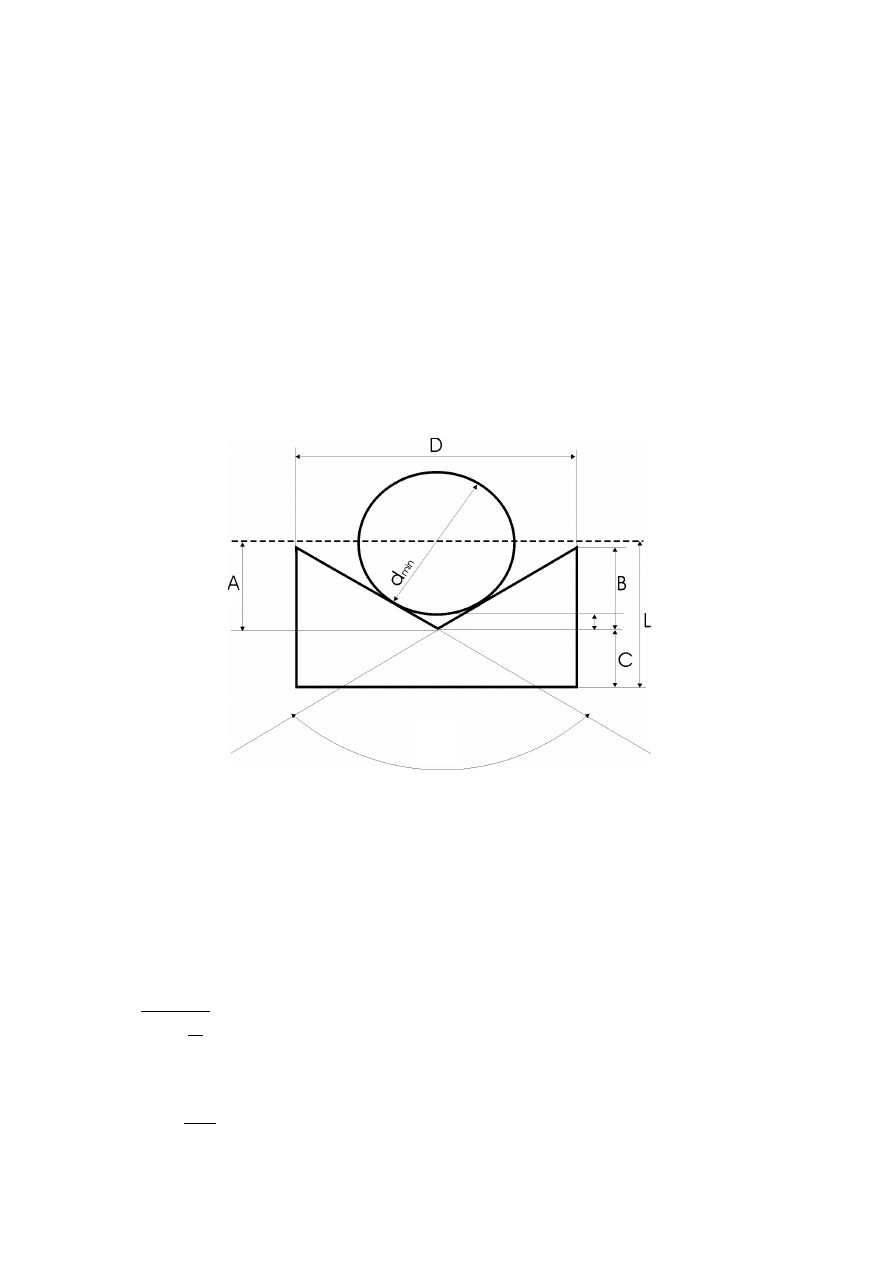
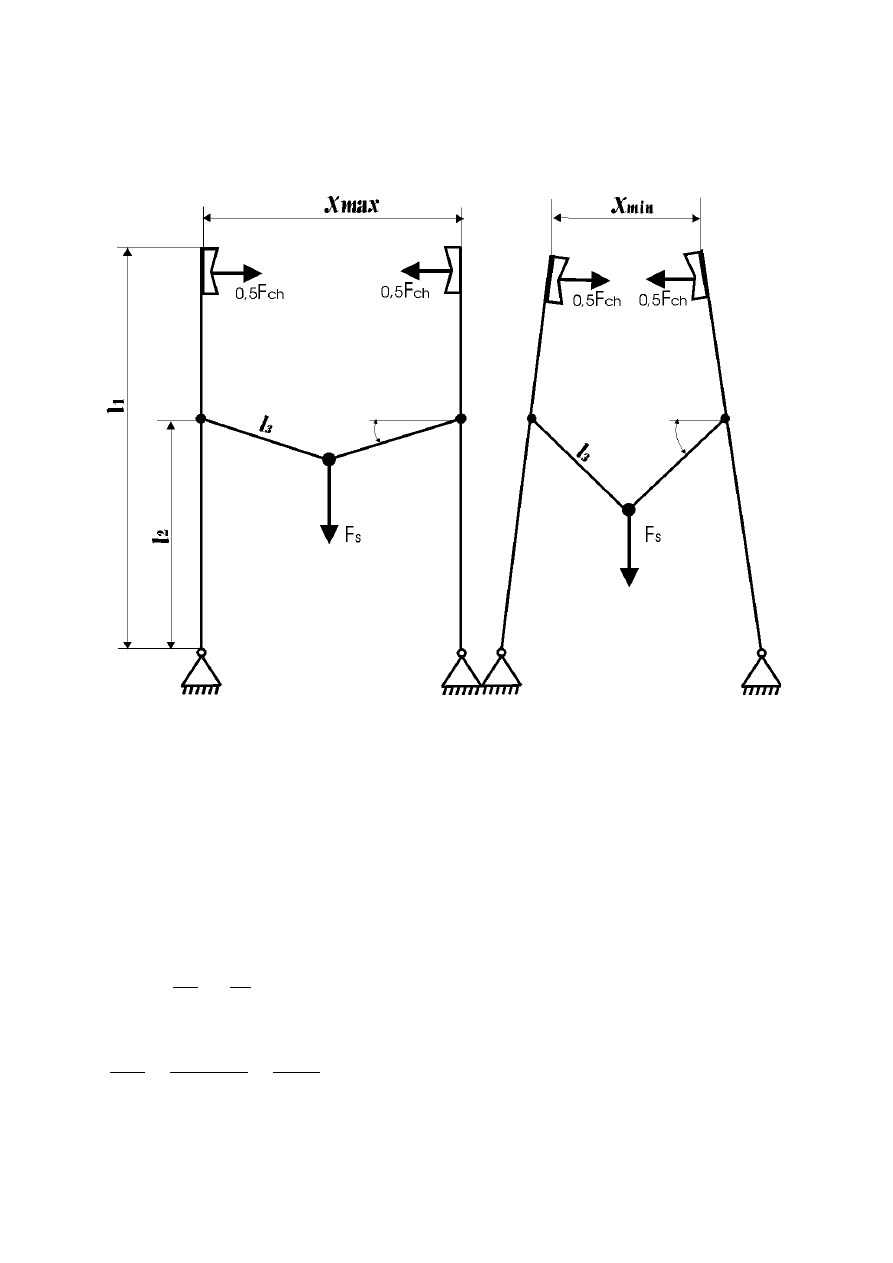
6. DOBRANIE PRYZMY.
W celu uszczegółowienie konstrukcji chwytaka należy dobrać wymiary pryzmy
trzymającej dla zmienności średnic. Pozwoli to na obliczenie rozsuwa ramion jak i ich
długości.
Chwytak jest przeznaczony do chwytu przedmiotów (wałka)o zmienności średnic od
60 do 80[mm]. Głównym parametrem pryzmy chwytnej jest jej kąt rozwarcia, im kąt jest
większy tym pryzma może uchwycić większy zakres średnic.
W projekcie przyjęto kąt rozwarcia pryzmy β=120º
d
min
=60[mm]
Luz miedzy szczękami przyjęliśmy l
min
=35[mm]
Przyjmujemy wymiar C=5[mm]
Pozostałe wymiary:
]
[
641
,
34
)
2
sin(
2
min
mm
d
A
=
⋅
=
β
przyjmuję wymiar A=35[mm]
Uwzględniając luz minimalny obliczam wymiar B z zależności:
141
,
17
2
min
=
−
=
l
A
B
β
11
Długość D wyznaczam z zależności:
]
[
378
,
59
30
2
2
)
2
180
(
mm
tg
B
D
D
B
tg
=
°
⋅
=
= >
=
−
°
β
przyjmuję wymiar D=60[mm]
Wysokość pryzmy wyznaczam z zależności:
]
[
141
,
22
mm
B
C
H
=
+
=
H=22[mm]
Obliczam długość końcówki chwytnej (od cięgna do końca pryzmy), która jest
2
1
długości całego ramienia.
]
[
689
,
109
2
max
mm
d
D
R
A
=
+
=
Obliczam długość całego ramienia:
]
[
378
,
219
2
1
61,8
R
C
mm
=
÷
=
Przyjmuję wobec tego długość ramienia 220 [mm]
12
7.
WYZNACZENIE CHARAKTERYSTYK-
DOBÓR SIŁOWNIKA.
x
max
=d
max
+2H
x
min
=d
min
+2H
czyli:
x
min
=60+2*22=104.282 [mm]
x
max
=80+2*22=124.282 [mm]
Przełożenie siłowe Fch/Fs chwytaka wynosi:
∑
=
⋅
⋅
−
0
)
(
2
2
:
2
1
l
ctg
Fs
l
F
MiA
ch
α
2
1
2
F
F
S
CH
α
α
ctg
l
ctg
l
=
⋅
=
l
1
=220 [mm]
l
2
=1/2 * l
1
=110 [mm]
l
3
=70 [mm]
A
13
Maksymalne wysunięcie siłownika:
]
[
208
,
8
mm
y
=
∆
więc:
Przyjmujemy skok siłownika równy 10 [mm].
Wyliczamy wartość kąta α
]
[
284
,
35
)
816
,
0
arccos(
816
,
0
3
2
2
cos
max
min
max
min
max
°
=
=
=
−
+
=
α
α
l
x
x
x
]
[
411
,
27
)
968
,
0
arccos(
888
,
0
60
1
,
58
3
2
cos
min
max
min
°
=
=
=
=
=
α
α
l
x
2
max
2
3
2
min
max
min
2
3
max
min
2
2
2
−
−
−
+
−
=
∆
−
=
∆
x
l
x
x
x
l
y
y
y
y
x
min,max
– max. i min. rozwarcie szczęk
y
min,max
–wysunięcie siłownika przy max. i
min. rozwarciu szczęk
14
Największe przełożenie siłowe chwytaka wynosi:
964
,
0
5
3
F
F
min
S
CH
=
=
α
ctg
Wymagane F
s
=79,298 [N]
Najmniejsze przełożenie siłowe chwytaka wynosi:
707
.
0
5
3
F
F
max
S
CH
=
=
α
ctg
Wymagane F
s
=108,203 [N]
Wymagana siła siłownika to minimum 108,203 [N].
15
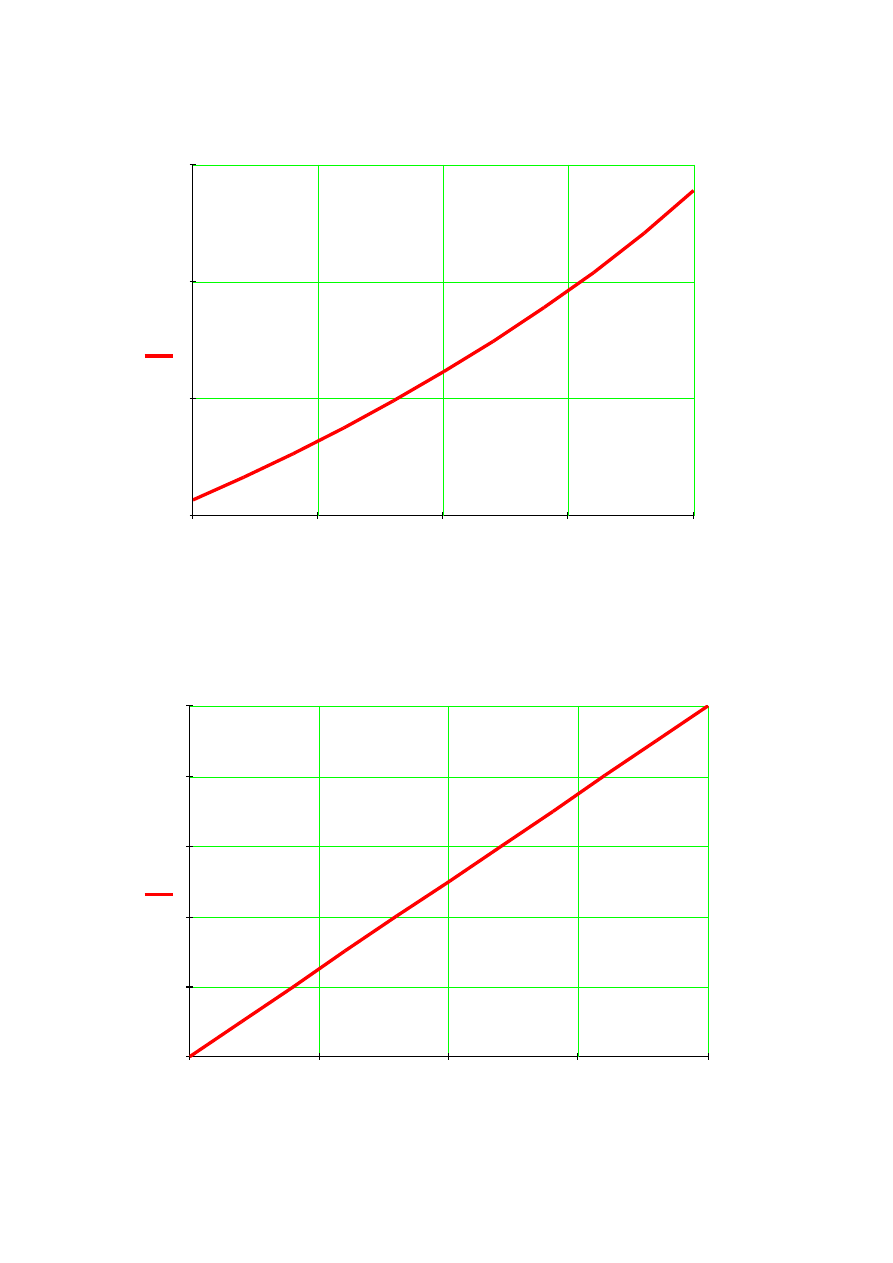
CHARAKTERYSTYKA PRZEŁOŻENIE-PRZEMIESZCZENIE
105
110
115
120
125
0.7
0.8
0.9
1
PRZEMIESZCZENIE
PR
Z
E
£ O ¯ E
N
IE
P
x
CHARAKTERYSTYKA WYSUW-PRZEMIESZCZENIE
105
110
115
120
125
2
4
6
8
10
ROZSTAW SZCZÊK
W
Y
SU
W
S
I
£ O
W
N
IK
A
y
x
16
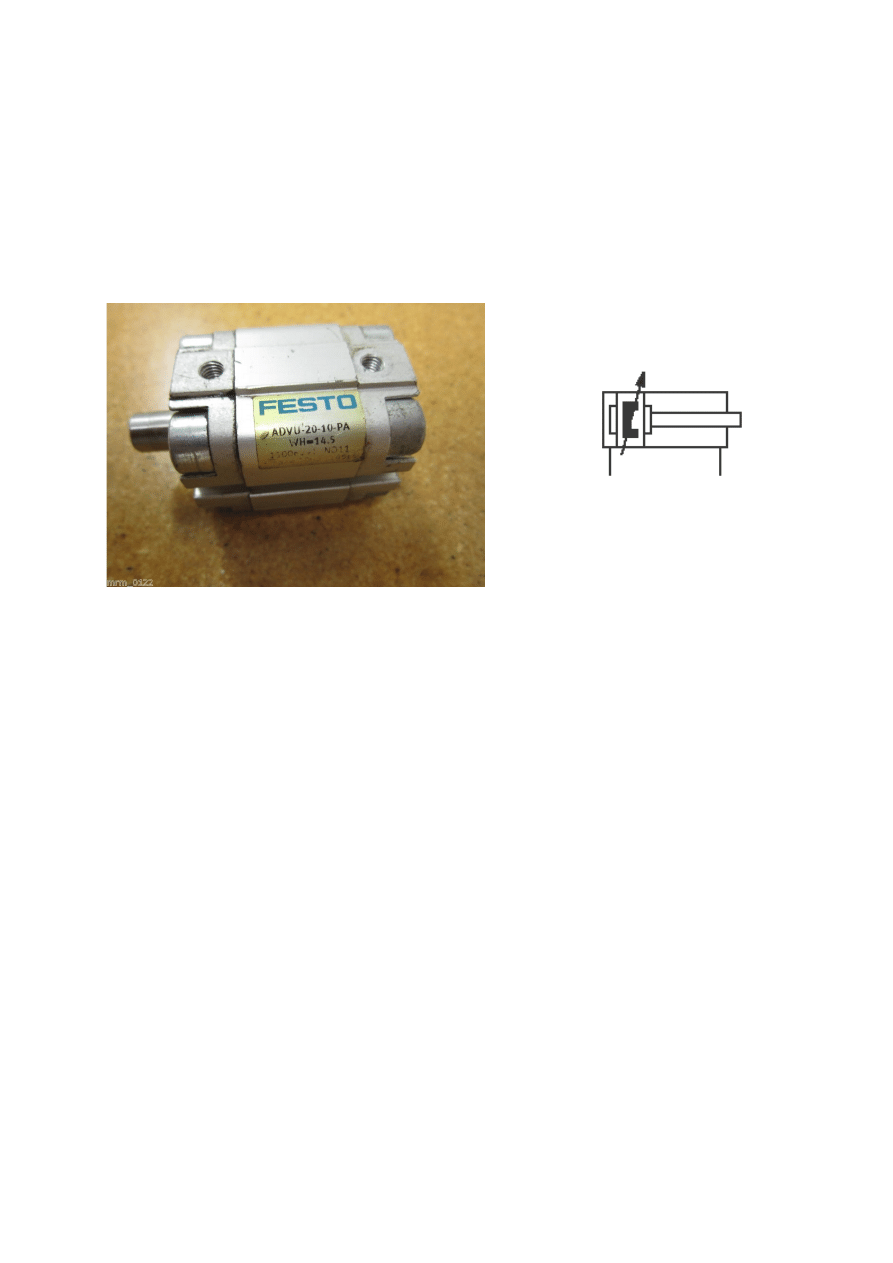
Dobrano siłownik ADVU-20-10-PA
firmy Festo o parametrach:
Skok
10 mm
Średnica tłoka
20 mm
Gwintu na tłoczysku
M10 zew., M5 wew.
Ciśnienie robocze
1 - 10 bar
Siła wypychająca (6bar)
188 N
Siła ciągnąca (6 bar)
141 N
17
8. OBLICZENIA WYTRZYMAŁOŚCIOWE.
DOBÓR PRZEKROJU RAMIENIA:
F
ch
=76,456 N
a=0,11 m
b=0,08 m
c=0,03 m
Σ
M
A
=
-R
By
·a-F
ch
·(a+b)=0
⇒
R
By
= -132,06 N
Σ
F
y
=
-R
A
-R
By
-F
ch
=0
⇒
R
A
= 55,604 N
Mg
1
=R
A
·x
1
x
1
=0
⇒
Mg
1
= 0 Nm
x
1
=a=0,11 m
⇒
Mg
1
= 6,116 Nm
Mg
2
=R
A
·(x
2
+a)+R
By
(x
2
)
x
2
=0
⇒
Mg
2
= 6,116 Nm
x
2
=b=0,08 m
⇒
Mg
2
= 21,13 Nm
Mg
3
=R
A
·(x
3
+a+b)+R
By
(x
3
+b)+0,5F
ch
(x
3
)
x
3
=0
⇒
Mg
3
= 21,13 Nm
x
3
=c=0,03 m
⇒
Mg
3
= 27,907 Nm
M
gmax
= 27,907 Nm
Dobrano minimalny przekrój d = 10 mm.
A
a
R
Bx
R
A
B
R
By
F
ch
b
c
d
d
m
d
MPa
d
w
w
M
dop
z
dop
z
g
0085
,
0
20
6
3
max
≥
=
=
≤
δ
δ
18
OBLICZENIE POŁĄCZENIA SWORZNIOWEGO:
Ponieważ sworzeń jest pasowany oblicza się go z warunku na ścinanie. Sworzeń
wykonany jest ze stali, dla której:
Największą siłą powodującą ścinanie sworznia jest siła dla α=35,284˚, najbardziej
obciążony jest sworzeń łączący ramię (w 1/2 długości) z cięgnem.
]
[
3
,
66
cos
5
,
0
N
F
F
s
=
=
α
Z warunków wytrzymałościowych otrzymujemy minimalna średnicę sworznia
d
≥
2,02 [ mm ]
Przyjmuję sworzeń o średnicy 5 [mm] wg.
PN-63/M-83002
LITERATURA:
-
Leszek A. Dobrzański „Podstawy nauki o materiałach i metaloznawstwo”, WNT, Gliwice – W-wa,
2002r.
t
4
t
k
i
4
πd
F
τ
]
[
105
2
210
k
≤
⋅
=
=
=
=
MPa
x
Qt
w
t
k
n
m
i
F
d
⋅
⋅
⋅
⋅
⋅
≥
π
4
m – ilość śrub (sworzni)
n – ilość płaszczyzn cięcia
i – wsp. Pewności = 0,4
19

-
Henryk Głowacki „Poradnik mechaniki technicznej. Wytrzymałość materiałów.”, Wydawnictwa
Szkolne i Pedagogiczne, W-wa, 1987r.
-
Ryszard Zdanowicz „Robotyzacja procesów technologicznych” Skrypt Politechniki Śląskiej nr
60133
-
Adam Morecki, Józef Knapczyk „Podstawy robotyki. Teoria i elementy manipulatorów i robotów”,
WNT, Warszawa 1999r.
-
Gabriel G. Kost „Podstawy budowy robotów” “, Skrypt Politechniki Śląskiej nr 1992
-
Fryderyk Staub „Metaloznawstwo”, Śląsk, 1979r.
-
Jerzy Leyko „Mechanika Techniczna”, WNT, W-wa , 1998r.
-
Jerzy Pikoń „Maszynoznawstwo i technika cieplna – tom 4”, Skrypt Politechniki Śląskiej nr 856
-
Gabriel G. Kost „Układy sterowania robotów przemysłowych“, Skrypt Politechniki Śląskiej nr 681
-
Ryszard Zdanowicz „Podstawy robotyki” Skrypt Politechniki Śląskiej nr 2001
ZAŁĄCZNIKI:
RYSUNEK ZŁOŻENIOWY
RYSUNKI WYKONAWCZE
20
Document Outline
- K6 - Prostota montażu chwytaków w kiści robota,
- K6 - Prostota montażu chwytaków w kiści robota,
- Obliczenie połączenia sworzniowego:
Wyszukiwarka
Podobne podstrony:
projekty szkolen(1) id 401146 Nieznany
Projekt nr2 id 399211 Nieznany
Projekt2 poprawiony id 400268 Nieznany
cw 13 id 121763 Nieznany
36 13 id 36113 Nieznany (2)
7 13 id 44730 Nieznany (2)
piae wyklad3 12 13 id 356381 Nieznany
Projekt z ekologii id 399851 Nieznany
3 Projektowanie betonu id 34011 Nieznany (2)
Alkohole 13 id 58087 Nieznany (2)
IMG 13 id 210986 Nieznany
Projektowanie przekladnie id 40 Nieznany
Projekt z budownictwa id 399843 Nieznany
G2 PB 02 B Rys 3 13 id 185405 Nieznany
Projektowanie raportow id 40062 Nieznany
13 id 189372 Nieznany (2)
Projektowanie betonu id 400490 Nieznany
więcej podobnych podstron