wmimb2011@gmail.com
hasło: 2011wmimb
Wydz. In
ż
ynierii
Ś
rodowiska
Politechniki Warszawskiej
1
WYTRZYMAŁO
ŚĆ
MATERIAŁÓW I MECHANIKA BUDOWLI
Wykład 3
Redukcja układu sił, elementy statyki 3D
1. Definicja redukcji, przesuniecie równoległe siły
2. Redukcja dowolnego układu sił do wektora głównego i momentu głównego
3. Niezmienniki redukcji
4. Równowa
ż
no
ść
układów sił, równowa
ż
no
ść
zeru układu sił
5. Redukcja układu sił do skr
ę
tnika
6. Def. momentu wektora wzgl
ę
dem osi
7. Warunki równowa
ż
no
ś
ci zeru przestrzennych układów sił
8. Wi
ę
zy idealne 3D, reakcje wi
ę
zów
Opracowanie : dr in
ż
. Szymon Imiełowski
prof. Zbigniew Kowalewski
Pa
P
Mom
M
P
P
V
i
A
i
3
2
=
=
=
=
∑
∑
A
V
A
M
M
V
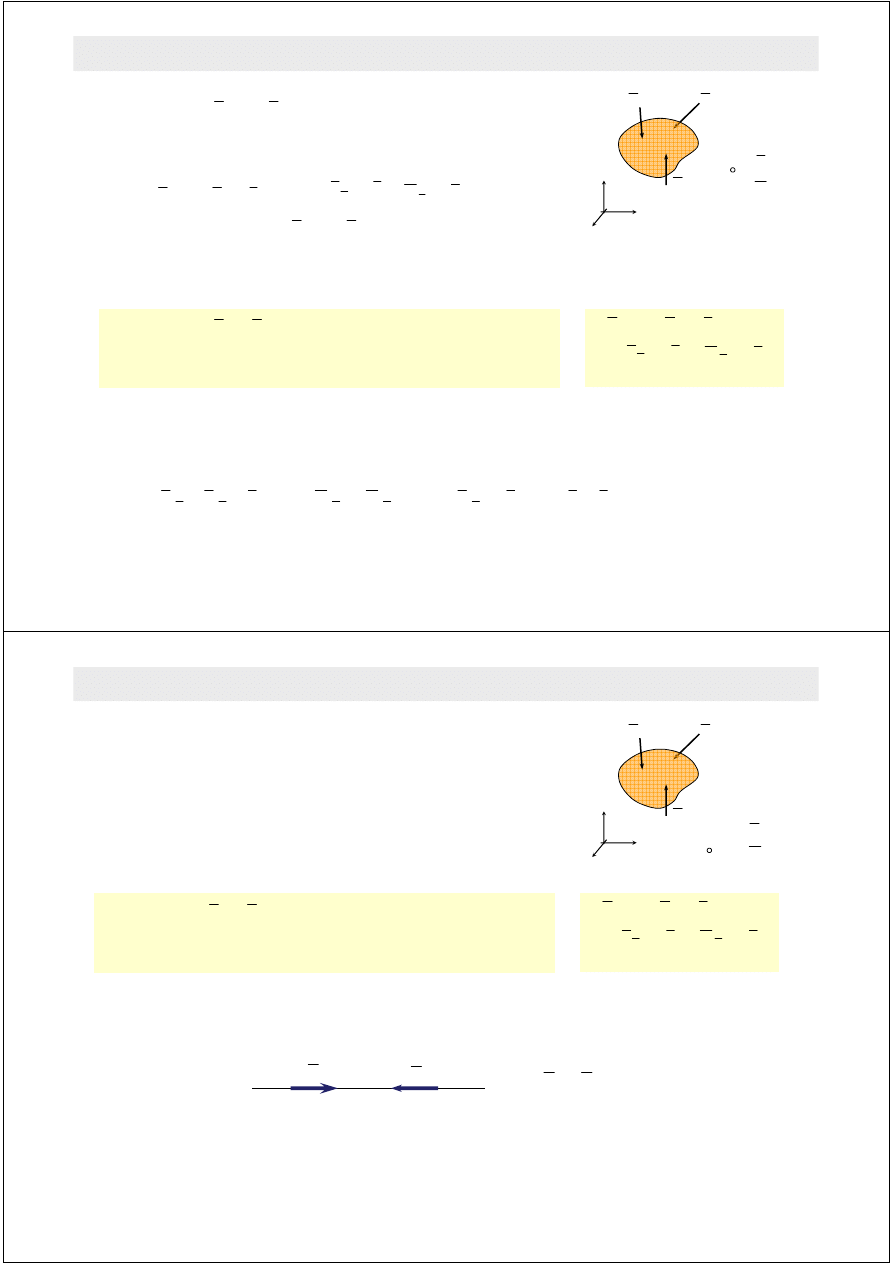
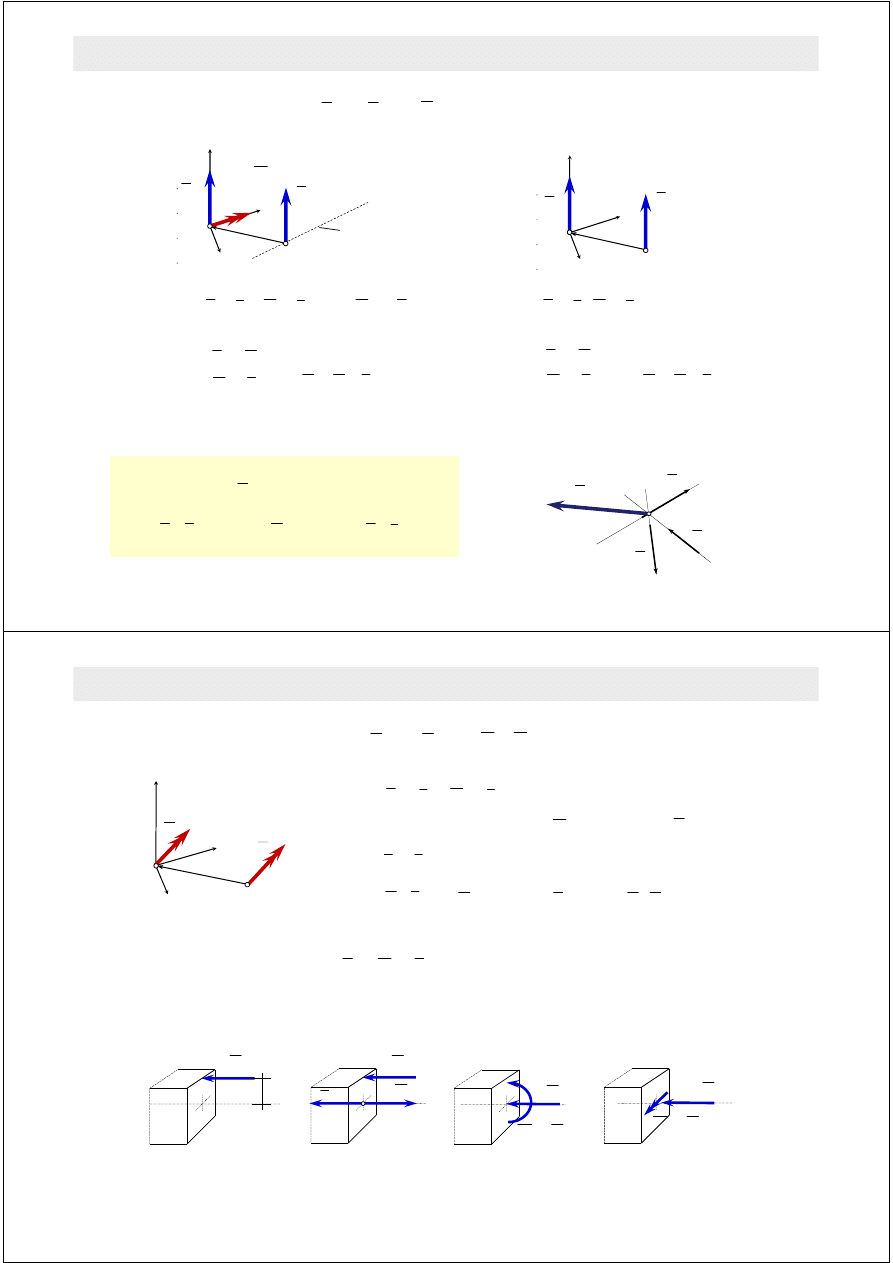
Równowaga sił w punkcie A
Dokonali
ś
my redukcji układu sił czynnych wzgl
ę
dem A, który nazywamy biegunem redukcji
Pa
M
P
V
A
A
3
2
=
=
A
M
A
V
P
P
P
P
a
a
≡
Redukcja układu sił - wst
ę
p
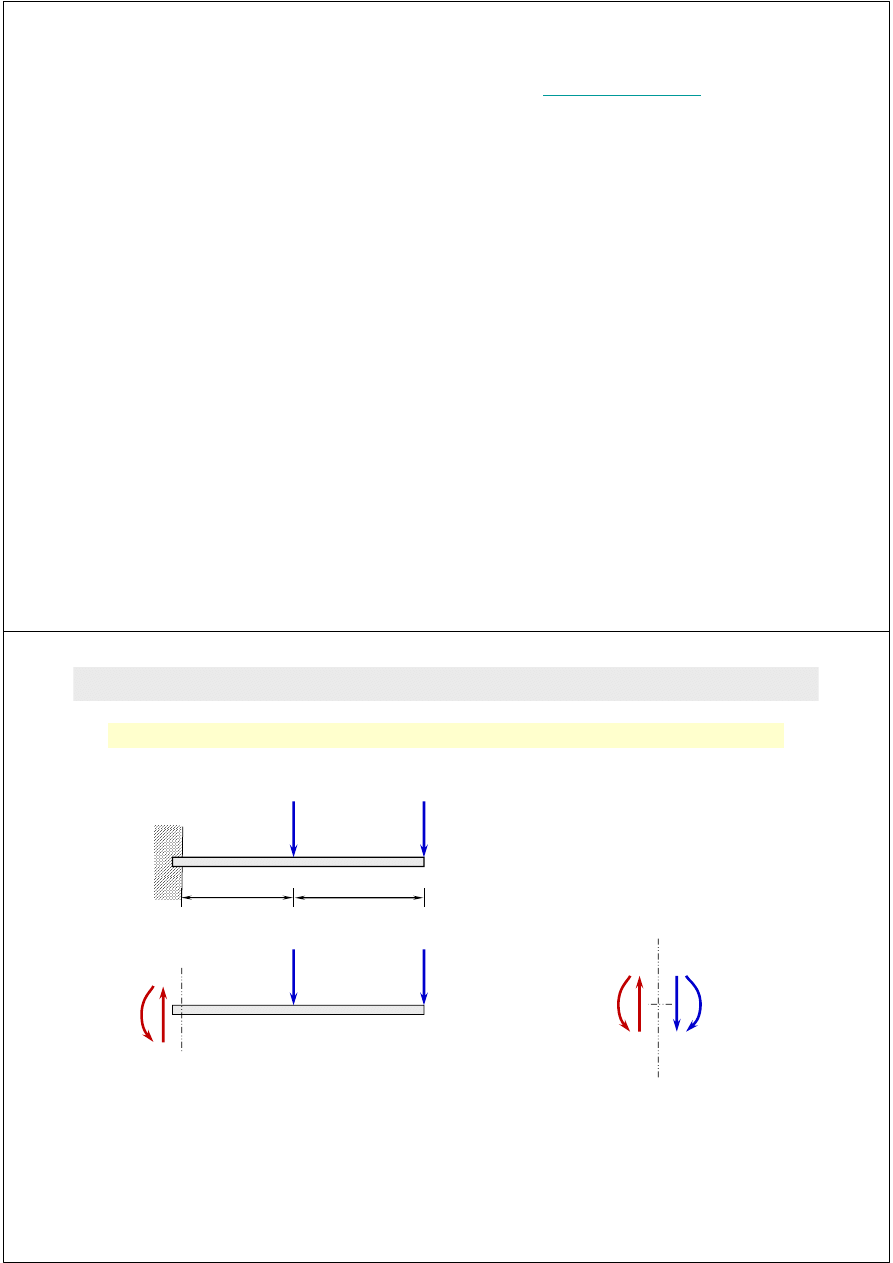
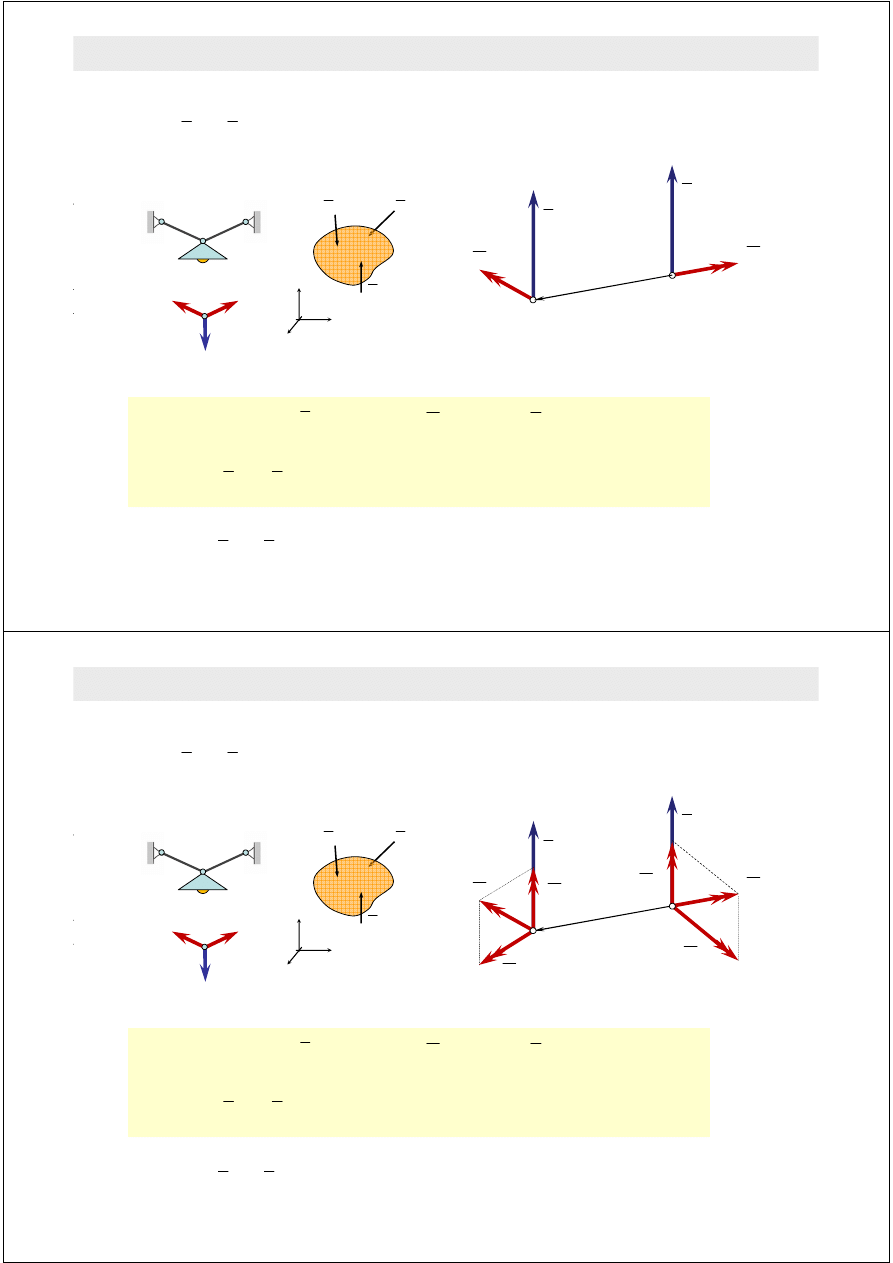
Redukcja układu sił – zast
ą
pienie danego układu sił, mo
ż
liwie najprostszym układem równowa
ż
nym.
W punkcie A obci
ąż
enie wspornika
mo
ż
na zast
ą
pic wypadkow
ą
sił
ą
V
i wypadkowym momentem M
A
Składowe reakcji w A :
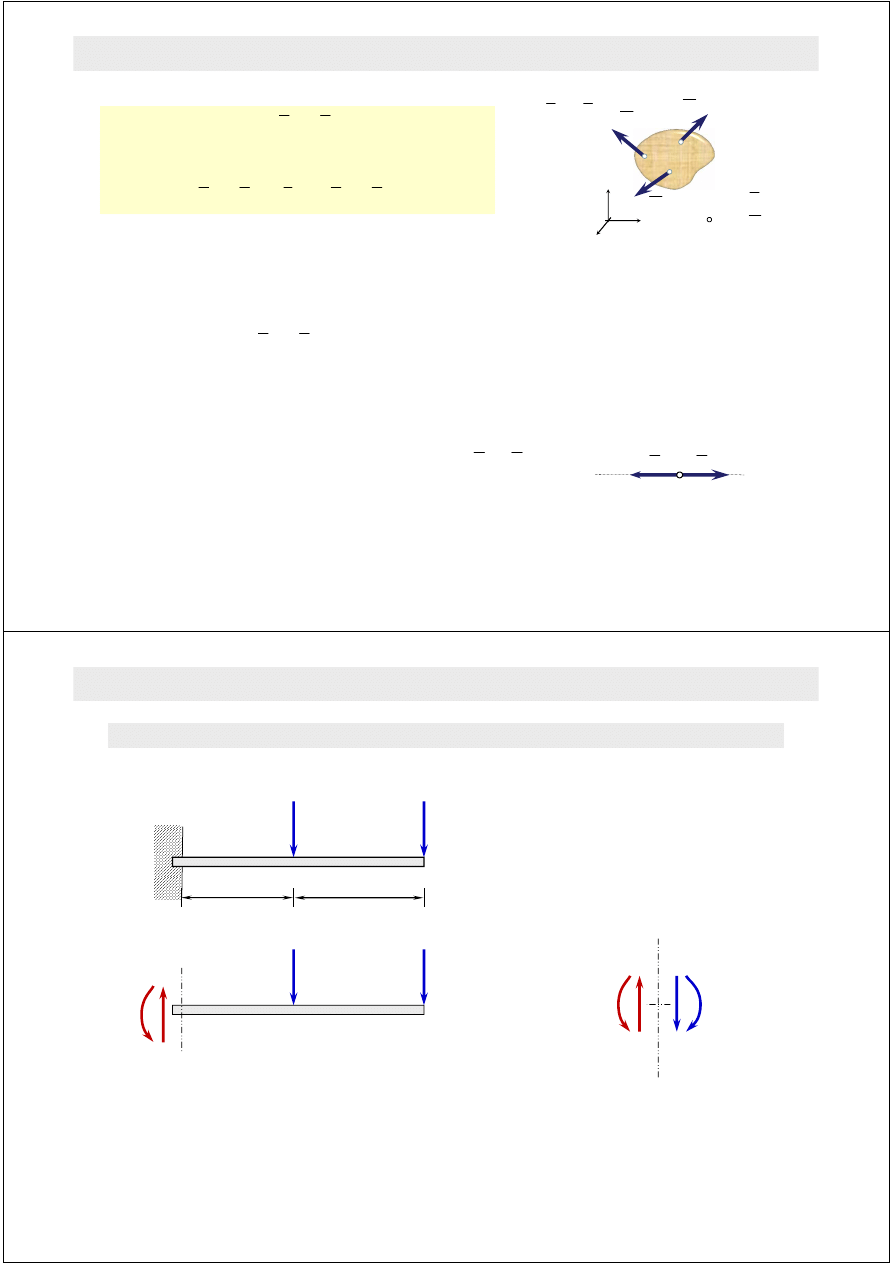
2
1) Działanie siły na ciało sztywne nie zmieni si
ę
, je
ż
eli punkt zaczepienia przeniesiony zostanie
do innego punktu le
żą
cego na linii działania siły, niech s
ą
wektorami posuwnymi osi
l
3
P
P
1
=
Wniosek z aksjomatu 5: Stan ruchu ciała nie zmieni si
ę
, gdy do działaj
ą
cego układu sił dodamy
lub odejmiemy układ sił równowa
ż
ny zeru.
Układem równowa
ż
nym zeru jest np. dwójka zerowa –
dwie siły współliniowe, równe co do warto
ś
ci i przeciwnie skierowane.
B
A
A
B
A
B
l
P
P
1
P
1
P
-
P
P
1
=
Redukcja układu sił - przesuni
ę
cie równoległe siły
1) Działanie siły na ciało sztywne nie zmieni si
ę
, je
ż
eli punkt zaczepienia przeniesiony zostanie
do innego punktu le
żą
cego na linii działania siły, niech s
ą
wektorami posuwnymi osi
l
4
P
P
1
=
Wniosek z aksjomatu 5: Stan ruchu ciała nie zmieni si
ę
, gdy do działaj
ą
cego układu sił dodamy
lub odejmiemy układ sił równowa
ż
ny zeru.
Układem równowa
ż
nym zeru jest np. dwójka zerowa –
dwie siły współliniowe, równe co do warto
ś
ci i przeciwnie skierowane.
B
A
A
B
A
B
l
P
P
1
P
1
P
-
P
P
1
=
B
A
A
B
A
B
l
P
P
1
P
1
P
-
P
P
1
=
d
P
M
1
B
⋅
=
d
2)
Je
ż
eli punkt zaczepienia siły zostanie przeniesiony poza jej lini
ę
działania oddziaływanie siły na
ciało musi by
ć
uzupełnione momentem, który stanowi reakcj
ę
na oddziaływanie na ciało
momentu, który powstał wskutek przesuni
ę
cia siły wzgl
ę
dem poło
ż
enia A.
Redukcja układu sił - przesuni
ę
cie równoległe siły
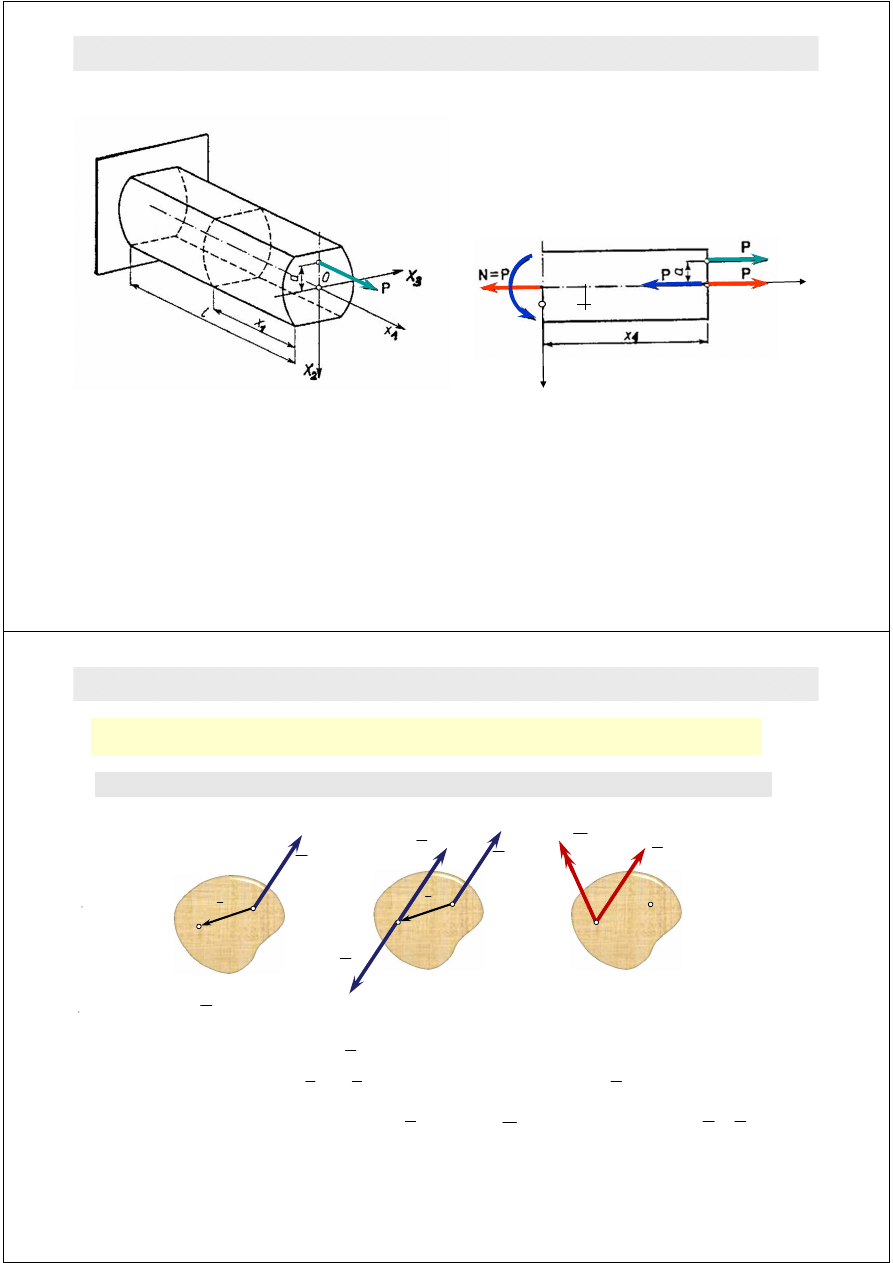
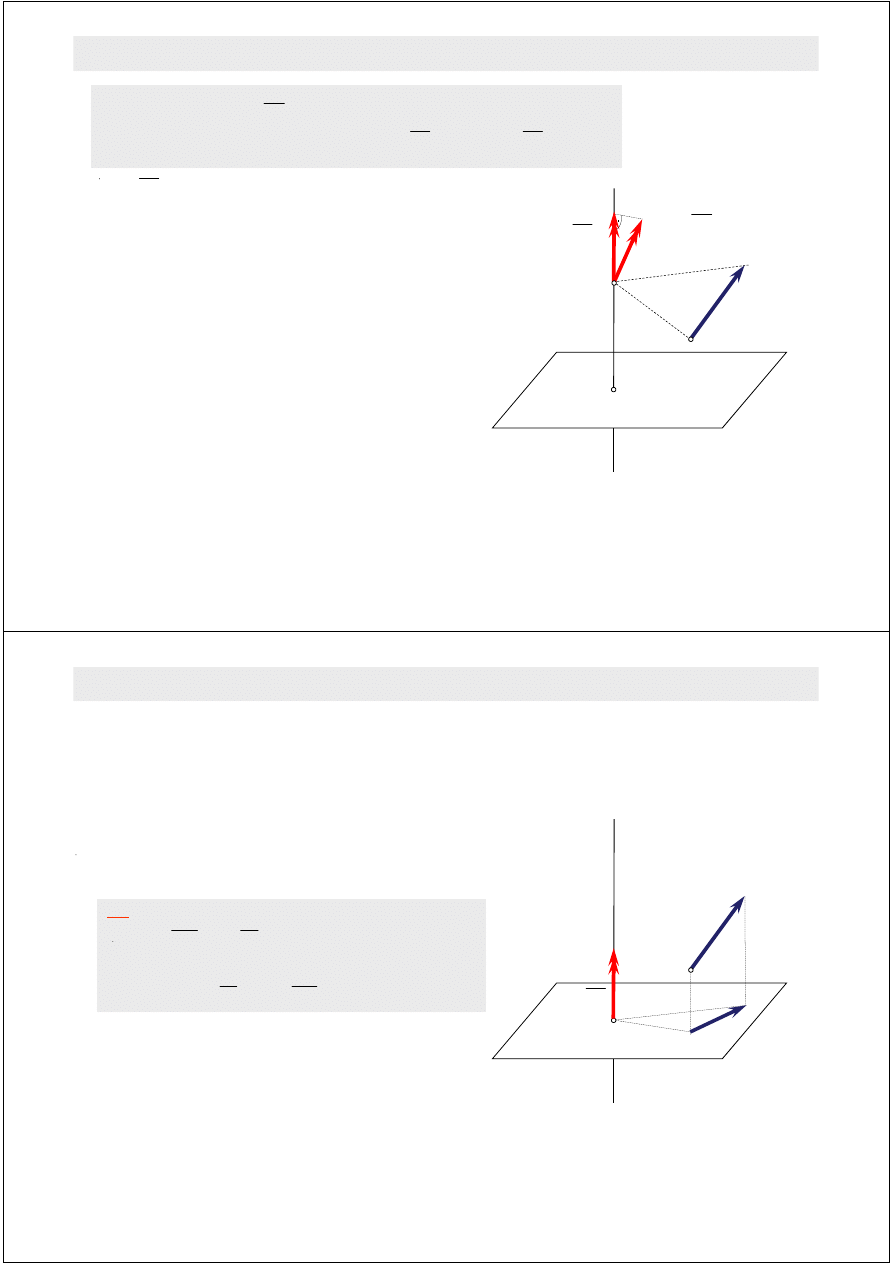
Przykład redukcji siły prostopadłej do przekroju wzgl
ę
dem
ś
rodka ci
ęż
ko
ś
ci przekroju.
Działanie siły przyło
ż
onej mimo
ś
rodowo jest równowa
ż
ne działaniu siły P i momentu M=Pa,
a jest wielko
ś
ci
ą
mimo
ś
rodu.
x
2
x
1
x
2A
A
M=Pa
Redukcja układu sił – mimo
ś
rodowe działanie siły
5
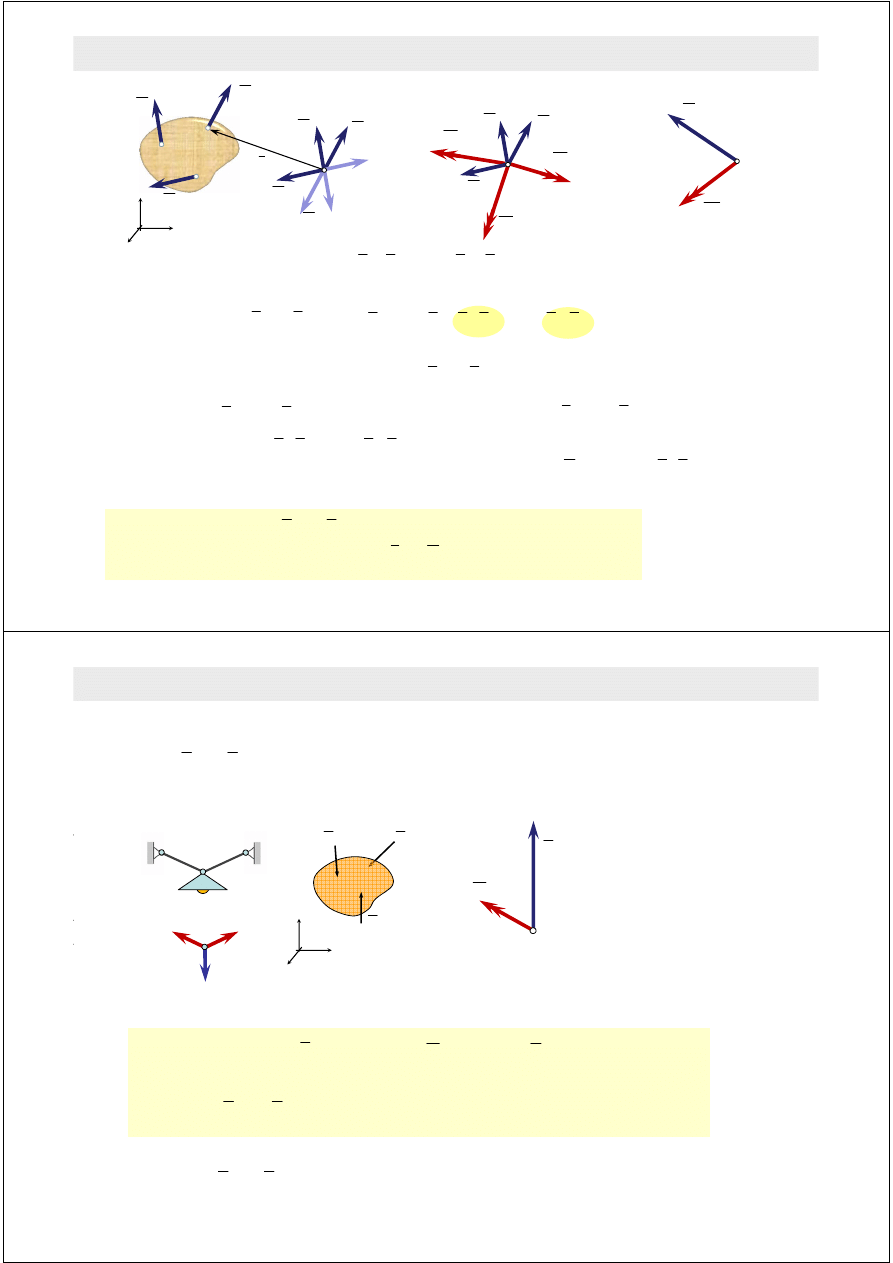
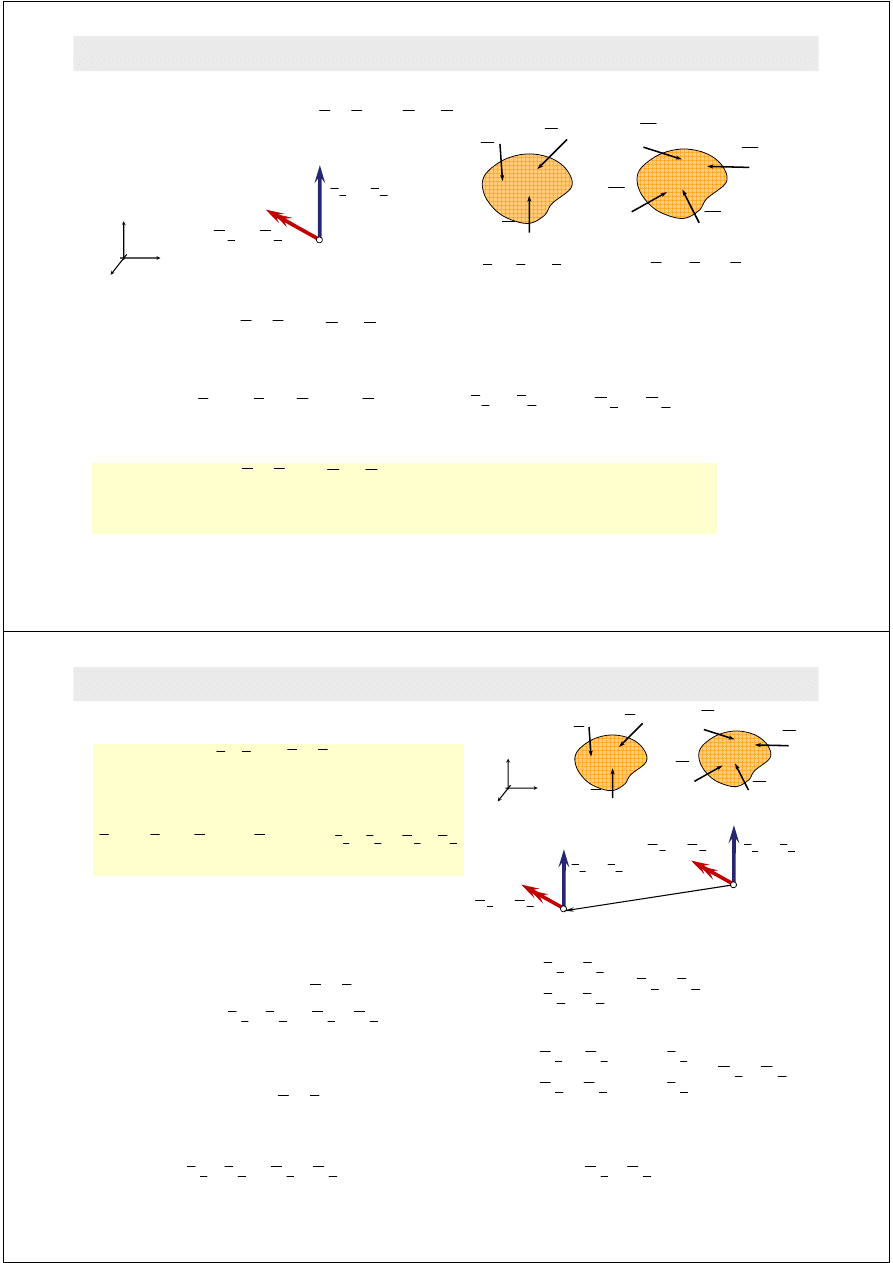
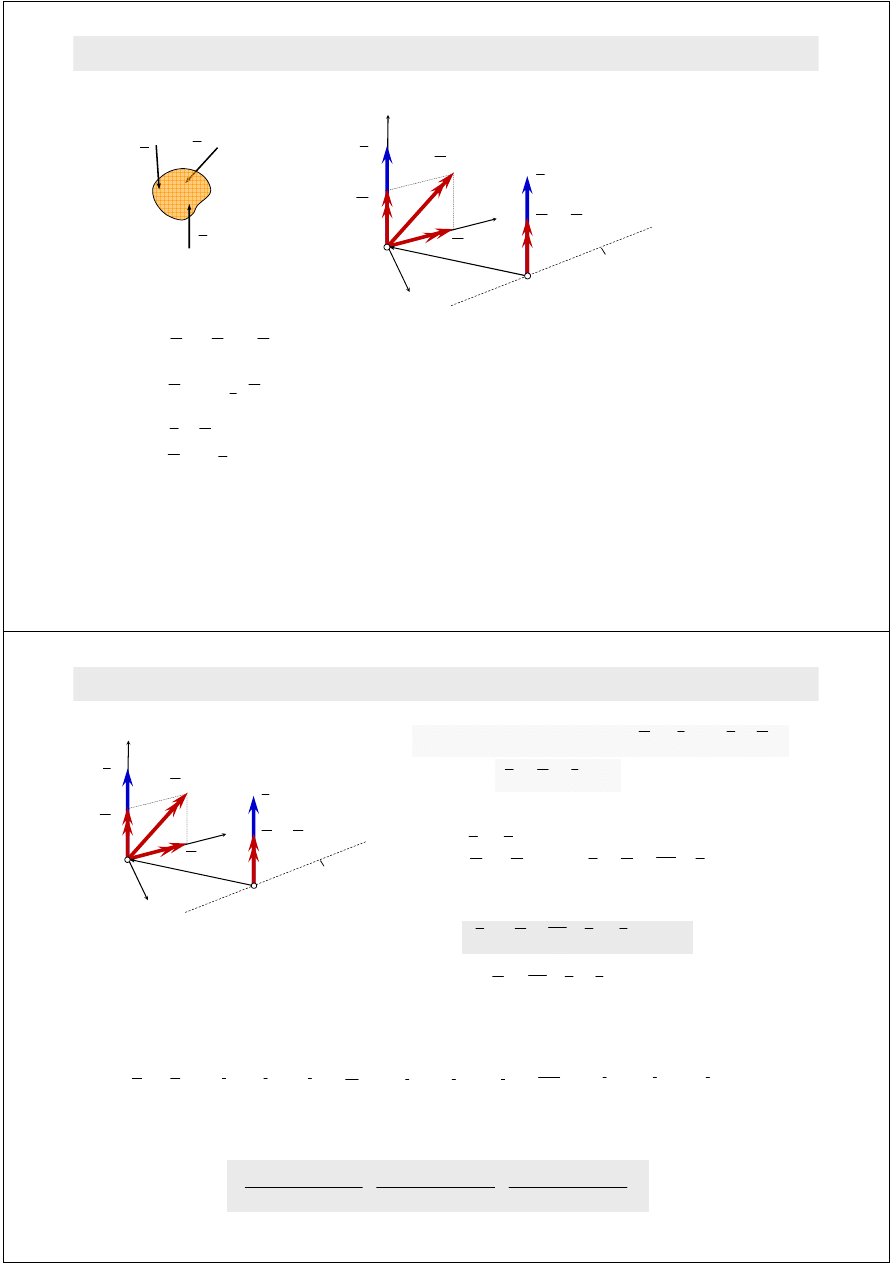
Rozwa
ż
amy jedn
ą
z sił układu sił działaj
ą
cych na ciało w p-cie A. W dowolnym p-cie O dodajemy
dwójk
ę
równowa
żą
cych si
ę
sił
jest przesuni
ę
ciem równoległym siły oraz
siła, która równowa
ż
y działanie siły .
W O otrzymali
ś
my nowy układ obci
ąż
e
ń
, sił
ę
i moment , b
ę
d
ą
cy momentem pary .
Siła działaj
ą
ca w punkcie A została zast
ą
piona sił
ą
działaj
ą
c
ą
w punkcie O i par
ą
sił.
Czynno
ść
t
ę
powtarzamy dla ka
ż
dej siły układu.
Redukcja układu sił – zast
ą
pienie danego układu sił, mo
ż
liwie najprostszym układem równowa
ż
nym.
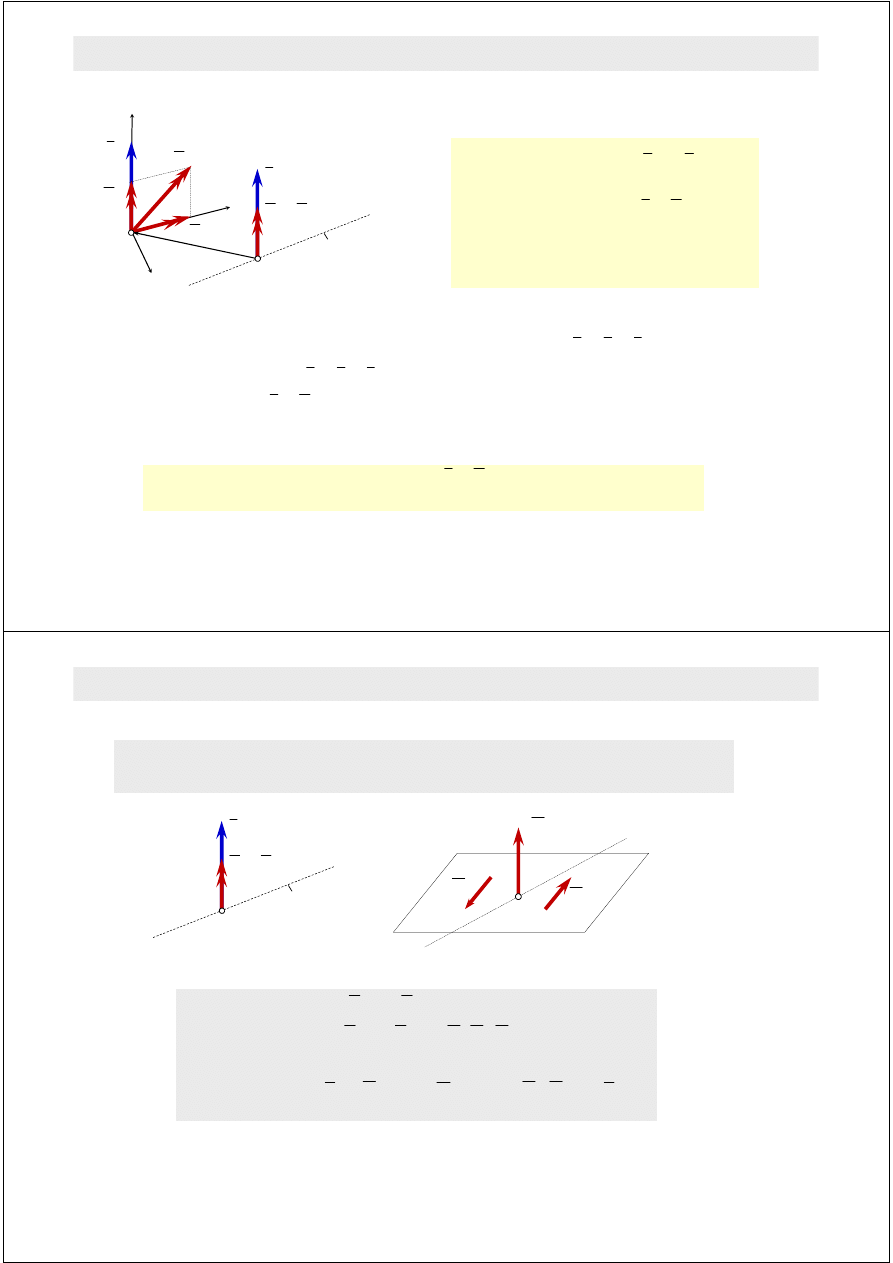
Tw.
Dowolny układ sił mo
ż
na zast
ą
pi
ć
układem sił zaczepionych w jednym punkcie i układem par sił.
Redukcja dowolnego układu sił do wektora głównego i momentu głównego
µ
i
P
A
r
µ
i
P
r
=
=
µ
O
A
O
A
O
'
i
P
'
''
i
i
P
P
−
=
M
'
i
P
M
''
i
P
'
i
P
)
,
''
i
i
P
P
(
'
i
P
P
'
i
P
6
Mówimy ,
ż
e układ sił
zredukowali
ś
my wzgl
ę
dem bieguna O
do wektora głównego i momentu głównego
•
układ sił
, którego wypadkowa jest równa
•
układ par sił
,
mo
ż
na obliczy
ć
sum
ę
momentów tych par
(
)
n
1
P
........
P
≡
(
)
''
''
n
P
,
P
........
P
,
P
,
'
P
........
'
P
n
1
1
n
1
W punkcie O otrzymali
ś
my równowa
ż
ne układowi
(
)
n
1
P
........
P
(
)
'
P
........
'
P
n
1
∑
=
=
n
1
i
i
o
'
P
F
(
)
'
'
P
,
P
........
'
'
P
,
P
n
n
1
1
(
)
∑
=
=
n
1
i
i
i
o
'
'
P
P
Mom
M
,
(
)
n
1
P
........
P
o
F
o
M
c.n.u
Redukcja dowolnego układu sił do wektora głównego i momentu głównego
µ
U
1
P
2
P
i
P
'
1
P
'
2
P
'
i
P
O
O
M
O
F
1
P
2
P
i
P
≡
O
O
1
M
i
M
2
M
i
r
A
i
a)
b)
c)
W punkcie O otrzymujemy układ par sił
, który jest równowa
ż
ny zeru.
Otrzymali
ś
my dwa równowa
ż
ne układy sił:
.
(
)
''
''
n
P
,
'
P
........
P
,
'
P
n
1
1
≡
"
i
P
7
zaczepione w punkcie A nazywamy wektorem głównym i momentem głównym
układu sił
wzgl
ę
dem punktu A. Punkt A nazywamy
ś
rodkiem redukcji
.
Wektor główny jest wypadkow
ą
sił
ą
a moment główny jest wypadkowym momentem
układu sił w punkcie A .
Def.:
Wektory
∑
=
=
n
1
i
i
A
P
F
jest dowolnym układem sil skupionych działaj
ą
cych na układ materialny
µ
(
)
n
1
P
........
P
µ
U
1
P
n
P
2
P
(
)
n
P
........
1
P
∑
=
=
n
1
i
i
A
A
P
Mom
M
Wektor główny i Moment główny
Q
R
R
A
A
M
A
F
(
)
n
1
P
........
P
8
jest dowolnym układem sil skupionych działaj
ą
cych na układ materialny
µ
(
)
n
1
P
........
P
µ
U
1
P
n
P
2
P
Wektor główny i Moment główny
Q
R
R
B
B
F
B
M
A
A
M
A
F
zaczepione w punkcie A nazywamy wektorem głównym i momentem głównym
układu sił
wzgl
ę
dem punktu A. Punkt A nazywamy
ś
rodkiem redukcji
.
Wektor główny jest wypadkow
ą
sił
ą
a moment główny jest wypadkowym momentem
układu sił w punkcie A .
Def.:
Wektory
∑
=
=
n
1
i
i
A
P
F
(
)
n
P
........
1
P
∑
=
=
n
1
i
i
A
A
P
Mom
M
(
)
n
1
P
........
P
9
jest dowolnym układem sil skupionych działaj
ą
cych na układ materialny
µ
(
)
n
1
P
........
P
µ
U
1
P
n
P
2
P
Wektor główny i Moment główny
Q
R
R
B
2
M
B
1
M
B
B
F
B
M
A
1
M
A
2
M
A
A
M
A
F
zaczepione w punkcie A nazywamy wektorem głównym i momentem głównym
układu sił
wzgl
ę
dem punktu A. Punkt A nazywamy
ś
rodkiem redukcji
.
Wektor główny jest wypadkow
ą
sił
ą
a moment główny jest wypadkowym momentem
układu sił w punkcie A .
Def.:
Wektory
∑
=
=
n
1
i
i
A
P
F
(
)
n
P
........
1
P
∑
=
=
n
1
i
i
A
A
P
Mom
M
(
)
n
1
P
........
P
10
Tw
. (o zmianie
ś
rodka redukcji)
(
)
n
1
P
........
P
jest układem sił skupionych, oraz
oraz A, B
∈
E dwa dowolne punkty,
wtedy z dokładno
ś
ci
ą
do punktu zaczepienia
B
A
F
F
=
B
F
A
F
M
rzut
M
rzut
B
A
=
i)
ii)
iii)
Niezmienniki redukcji
1) wektor główny
B
A
F
F
=
2) rzut momentu głównego na kierunek wektora głównego
B
F
A
F
M
rzut
M
rzut
B
A
=
Dowód:
i)
Suma wektorów (wektor główny) nie zale
ż
y od poło
ż
enia układu współrz
ę
dnych
ii)
Wynika z def. momentu wektora wzgl
ę
dem punktu oraz
jest wektorem swobodnym
A
M
iii)
(
)
(
)
A
F
A
F
A
F
A
B
A
F
B
F
M
rzut
F
BA
rzut
M
rzut
F
Mom
M
rzut
M
rzut
A
A
A
A
B
=
×
+
=
+
=
cnu.
poniewa
ż
O
)
F
A
B
(
rzut
F
F
BA
A
F
A
A
A
≡
×
→
⊥
×
.
||
A
B
F
F
oraz
A
B
A
B
F
Mom
M
M
+
=
Je
ż
eli
Wektor główny i Moment główny
– tw. o zmianie
ś
rodka redukcji
B
2
M
B
1
M
B
B
F
B
M
A
1
M
A
2
M
A
A
M
A
F
11
Rozwa
ż
my dwa ro
ż
ne układy sił i
(
) ( )
P
P
P
n
1
=
K
µ
µ
1
P
U
n
P
2
P
1
Q
n
Q
2
Q
3
Q
(
) ( )
Q
Q
Q
n
1
=
K
Równowa
ż
no
ść
układów sił (wektorów)
(
)
n
1
P
P
K
(
)
n
1
Q
Q
K
12
Def.
Dwa uklady sił
i
s
ą
(geometrycznie) równowa
ż
nymi wtedy i tylko wtedy, gdy
wzgl
ę
dem ka
ż
dego punktu O
∈
E wektory główne i momenty główne tych układów sił s
ą
odpowiednio
równe.
Rozwa
ż
my dwa ro
ż
ne układy sił i
(
) ( )
P
P
P
n
1
=
K
µ
µ
1
P
U
n
P
2
P
1
Q
n
Q
2
Q
3
Q
(
) ( )
Q
Q
Q
n
1
=
K
(
)
n
1
P
P
K
(
)
n
1
Q
Q
K
⇔
≡
)
Q
..
..........
Q
(
)
P
..........
P
(
n
1
n
1
o
)
Q
(
o
)
P
(
E
O
F
F
=
∧
∈
,
o
)
Q
(
o
)
P
(
M
M
=
Def.
Dwa uklady sił
i
s
ą
równowa
ż
nymi wtedy i tylko wtedy, gdy
istnieje taki punktu O
∈
E , w którym wektory główne i momenty główne tych układów sił s
ą
odpowiednio równe.
(
)
n
1
P
P
K
(
)
n
1
Q
Q
K
Równowa
ż
no
ść
układów sił (wektorów)
O
o
)
Q
(
o
)
P
(
F
F
=
o
)
Q
(
o
)
P
(
M
M
=
(
)
n
1
P
P
K
(
)
n
1
Q
Q
K
13
Def.
Dwa uklady sił
i
s
ą
równowa
ż
nymi
wtedy i tylko wtedy, gdy istnieje taki punkt O
∈
E ,
w którym wektory główne i momenty główne tych układów sił
s
ą
odpowiednio równe.
Je
ś
li O jest dowolnym punktem, wi
ę
c je
ż
eli to znaczy,
ż
e w ka
ż
dym punkcie przestrzeni
wektory główne układów
s
ą
sobie równe
⇔
≡
)
Q
..
..........
Q
(
)
P
..........
P
(
n
1
n
1
,
O
)
Q
(
O
)
P
(
E
O
F
F
=
∨
∈
O
)
Q
(
O
)
P
(
M
M
=
Dowód.
Załó
ż
my,
ż
e O, A
∈
E s
ą
dowolnymi punktami
przestrzeni oraz w A układy sił
s
ą
sobie
równowa
ż
ne, tzn.
)
P
(
i
)
Q
(
=
=
A
)
Q
(
O
)
Q
(
A
)
P
(
O
)
P
(
F
F
F
F
O
)
Q
(
O
)
P
(
F
F
=
i)
(
)
n
1
P
P
K
(
)
n
1
Q
Q
K
A
)
Q
(
A
)
P
(
A
)
Q
(
A
)
P
(
M
M
F
F
=
=
,
+
=
+
=
A
)
Q
(
O
A
)
Q
(
O
)
Q
(
A
)
P
(
O
A
)
P
(
O
)
P
(
F
Mom
M
M
F
Mom
M
M
skoro w A:
to w dowolnym punkcie A równie
ż
ii)
O
)
Q
(
O
)
P
(
M
M
=
A
)
Q
(
A
)
P
(
A
)
Q
(
A
)
P
(
M
M
F
F
=
=
,
O
)
Q
(
O
)
P
(
M
M
=
)
P
(
i
)
Q
(
Równowa
ż
no
ść
układów sił (wektorów)
µ
µ
1
P
U
n
P
2
P
1
Q
n
Q
2
Q
3
Q
A
A
)
Q
(
A
)
P
(
F
F
=
A
)
Q
(
A
)
P
(
M
M
=
O
O
)
Q
(
O
)
P
(
F
F
=
O
)
Q
(
O
)
P
(
M
M
=
14
Ka
ż
d
ą
sił
ę
zewn
ę
trzn
ą
przyło
ż
on
ą
do układu
µ
mo
ż
na przesun
ąć
wzdłu
ż
linii działania
nie zmieniaj
ą
c przy tym stanu układu.
Stan ruchu układu materialnego poddanego działaniu ró
ż
nych ale równowa
ż
nych
sobie układów sił
jest w obu przypadkach identyczny.
Warto
ść
reakcji sztywnego układu materialnego poddanego działaniu ró
ż
nych ale równowa
ż
nych
sobie układów sił
jest w obu przypadkach identyczna.
•
Dowolne dwie reprezentacje wektora posuwnego s
ą
wektorami równowa
ż
nymi
.
•
Dwa układy równowa
ż
ne s
ą
trzeciemu s
ą
sobie równowa
ż
ne.
)
P
(
i
)
Q
(
P
'
P
d
A
Pd
P
=
=
=
=
A
)
P
(
A
)
P
(
A
)
P
(
A
)
P
(
'
'
M
M
F
F
,
P
P
=
'
P
'
P
Dowód:
)
P
(
i
)
Q
(
Równowa
ż
no
ść
układów sił (wektorów)
15
Def.
Układ sił
nazywamy równowa
ż
nym zeru
wtedy i tylko wtedy gdy, wzgl
ę
dem ka
ż
dego punktu przestrzeni,
wektor główny i moment główny tego układu sił s
ą
wektorami zerowymi.
)
P
........
P
(
n
1
⇔
≡
0
)
P
........
P
(
n
1
0
F
o
)
P
(
E
O
≡
∧
∈
,
.
0
M
o
)
P
(
≡
Mówimy,
ż
e siły układu równowa
żą
si
ę
.
)
P
........
P
(
n
1
Równowa
ż
no
ść
zeru układu sił (wektorów)
µ
U
1
P
n
P
2
P
O
0
≡
o
F
0
≡
o
M
16
Def.
Układ sił
nazywamy równowa
ż
nym zeru
wtedy i tylko wtedy gdy, wzgl
ę
dem ka
ż
dego punktu przestrzeni,
wektor główny i moment główny tego układu sił s
ą
wektorami zerowymi.
)
P
........
P
(
n
1
⇔
≡
0
)
P
........
P
(
n
1
0
F
o
)
P
(
E
O
≡
∧
∈
,
.
0
M
o
)
P
(
≡
Mówimy,
ż
e siły układu równowa
żą
si
ę
.
Tw.
Układ sił
jest równowa
ż
ny zeru wtedy i tylko wtedy
gdy, istnieje taki punkt wzgl
ę
dem którego, wektor główny i moment
główny tego układu sił s
ą
wektorami zerowymi.
)
(
n
1
P
P
K
⇔
≡
0
)
P
........
P
(
n
1
,
0
F
o
)
P
(
E
O
=
∨
∈
,
.
0
M
o
)
P
(
=
Dowód:
Załó
ż
my,
ż
e w punkcie O
∈
E wektor główny i moment główny układu sił
( P1 . . . . Pn ) s
ą
równe zeru. Wobec tego w dowolnym punkcie A
∈
E zachodzi
0
0
Mom
0
F
Mom
M
M
0
F
F
A
o
)
P
(
A
o
)
P
(
A
)
P
(
o
)
P
(
A
)
P
(
≡
+
≡
+
=
≡
≡
,
)
P
........
P
(
n
1
Równowa
ż
no
ść
zeru układu sił (wektorów)
µ
U
1
P
n
P
2
P
O
0
≡
o
F
0
≡
o
M
17
•
Układ dwóch sił o wektorach wzajemnie przeciwnych le
żą
cych na jednej prostej jest równowa
ż
ny zeru.
Jest nazywany zerow
ą
dwójk
ą
sił.
P
’
P
'
P
P
−
=
Tw.
Układ sił
jest równowa
ż
ny zeru wtedy i tylko wtedy
gdy, istnieje taki punkt wzgl
ę
dem którego, wektor główny i moment
główny tego układu sił s
ą
wektorami zerowymi.
)
(
n
1
P
P
K
⇔
≡
0
)
P
........
P
(
n
1
,
0
F
o
)
P
(
E
O
=
∨
∈
,
.
0
M
o
)
P
(
=
Równowa
ż
no
ść
zeru układu sił (wektorów)
µ
U
1
P
n
P
2
P
O
0
≡
o
F
0
≡
o
M
18
Stan (ruchu) układu
, do którego dodano równowa
ż
ny zeru układ sił nie ulega zmianie.
Warto
ść
reakcji sztywnego układu materialnego poddanego działaniu dowolnego układu sił,
do którego dodano równowa
ż
ny zeru układ sił nie ulega zmianie
.
Powy
ż
sze twierdzenie jest uzasadnieniem aksjomatu 5.
Dowód
: Wektor główny i moment główny układu równowa
ż
nego s
ą
równe zeru, wi
ę
c dodanie go
do dowolnego nie zmieni warto
ś
ci momentu głównego i wektora głównego tego układu.
Tw.
Je
ż
eli do układu sił
dodamy układ sił
równowa
ż
ny zeru, to tak otrzymany układ jest równowa
ż
ny
układowi pierwotnemu
)
(
n
1
P
P
K
)
P
P
(
)
0
(
)
P
P
(
n
1
n
1
K
K
≡
+
)
(
n
1
P
P
K
•
W szczególnym przypadku dodanie zerowej dwójki sił,
zmieni stanu równowagi układu.
Równowa
ż
no
ść
zeru układu sił (wektorów)
)
(
n
1
P
P
K
'
P
P
−
=
U
O
0
≡
o
F
0
≡
o
M
µ
1
P
n
P
2
P
P
’
P
19
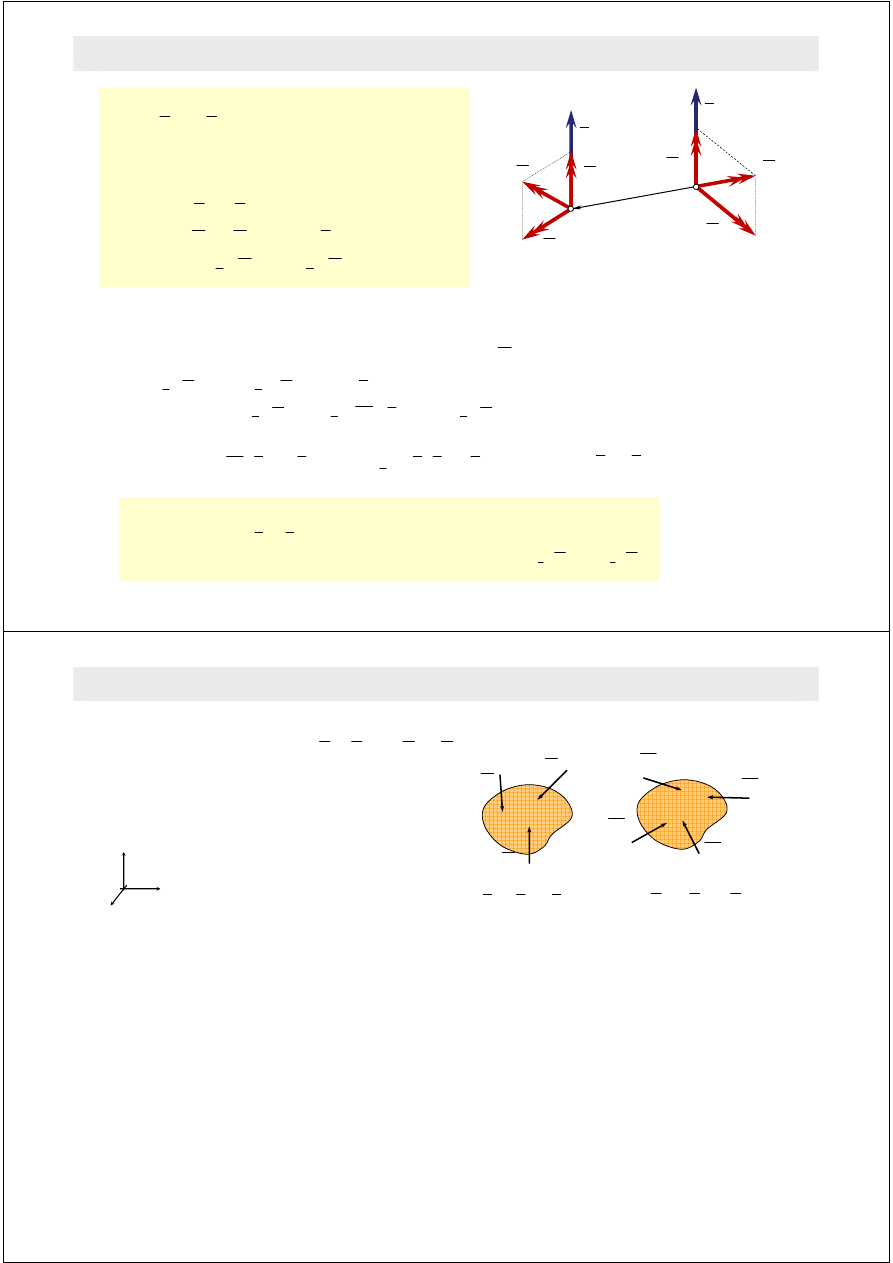
Pa
P
Mom
M
P
P
V
i
A
i
3
2
=
=
=
=
∑
∑
A
V
A
M
M
V
Równowaga sił w punkcie A
Dokonali
ś
my redukcji układu sił czynnych wzgl
ę
dem A, który nazywamy biegunem redukcji
Pa
M
P
V
A
A
3
2
=
=
A
M
A
V
P
P
P
P
a
a
≡
Redukcja układu sił - wst
ę
p
Redukcja układu sił – zast
ą
pienie danego układu sił, mo
ż
liwie najprostszym układem równowa
ż
nym.
W punkcie A obci
ąż
enie wspornika
mo
ż
na zast
ą
pic wypadkow
ą
sił
ą
V
i wypadkowym momentem M
A
Składowe reakcji w A :
20
1
P
µ
n
P
2
P
o
2
o
1
o
M
M
M
+
=
o
F
o
1
M
rzut
M
o
=
- rzut wektora momentu głównego na kierunek wektora głównego
o
1
o
M
,
F
- niezmienniki redukcji (nie ulegaj
ą
zmianie przy przesuni
ę
ciu bieguna)
o
2
M
⊥
o
F
- ulega zmianie przy zmianie poło
ż
enia bieguna
prosta centralna
S(x
1S
, x
2S
, x
3S
)
O
S
1
S
M
M
=
S
F
1
x
o
1
M
o
M
o
F
o
2
M
2
x
3
x
Redukcja układu sił - prosta centralna, skr
ę
tnik
21
Sk
ą
d .
0
≡
S
2
M
S
S
M
F
||
0
≡
×
S
S
M
F
Dla dowolnego poło
ż
enia bieguna S
,
o
S
F
F
=
.
o
o
o
S
o
S
F
SO
M
F
Mom
M
M
×
+
=
+
=
Po podstawieniu do (*)
0
)
F
SO
M
(
F
o
o
o
=
×
+
×
Aby zachodziła równo
ść
(**) musi by
ć
spełniony warunek ,
z którego mo
ż
na wyznaczy
ć
współrz
ę
dne punktu .
0
F
SO
M
o
o
=
×
+
,
3
3
2
2
1
1
o
S
i
F
i
F
i
F
F
F
+
+
=
=
,
3
3
2
2
1
1
o
i
M
i
M
i
M
M
+
+
=
.
3
3S
2
2S
1
1S
i
x
i
x
i
x
SO
+
+
=
Punkty te le
żą
na prostej tzw. prostej centralnej o równaniu (bez wyprowadzenia)
(*)
. (**)
W układzie współrz
ę
dnych zaczepionym w O
3
1S
2
2S
1
3
2
3S
1
1S
3
2
1
2S
3
3S
1
1
F
x
F
x
F
M
F
x
F
x
F
M
F
x
F
x
F
M
−
+
=
−
+
=
−
+
Wyznaczmy punkt S, w którym tzn. ,
S(x
1S
, x
2S
, x
3S
)
Redukcja układu sił - prosta centralna, skr
ę
tnik
prosta centralna
S(x
1S
, x
2S
, x
3S
)
O
S
1
S
M
M
=
S
F
1
x
o
1
M
o
M
o
F
o
2
M
2
x
3
x
22
Opisywany szczególny przypadek redukcji ,
, kierunek wektora głównego
pokrywa si
ę
z kierunkiem momentu głównego nazywa si
ę
skr
ę
tnikiem.
W przypadku
,
warunek jest spełniony dla dowolnego punktu przestrzeni, S
∈
E
3
.
Dla dowolnego układu sił
,
prosta centralna jest zbiorem punktów S
spełniaj
ą
cych warunek ,
(
)
n
1
P
........
P
S
S
M
F
||
tzn. kierunek wektora głównego pokrywa si
ę
z kierunkiem momentu głównego.
Uwaga:
Równanie prostej centralnej ma sens tylko w przypadku .
0
F
F
S
o
≠
=
0
F
F
S
o
≡
=
S
S
M
F
||
S
S
M
F
||
Redukcja układu sił - prosta centralna, skr
ę
tnik
prosta centralna
S(x
1S
, x
2S
, x
3S
)
O
S
1
S
M
M
=
S
F
1
x
o
1
M
o
M
o
F
o
2
M
2
x
3
x
23
Def.
Skr
ę
tnik – układ 3-ch sił ( Q1 , Q2 , Q3 ), z których dwie tworz
ą
par
ę
sił , a trzecia jest
prostopadła do płaszczyzny tej pary.
2
Q
π
prosta centralna
S
3
Q
1
Q
Tw. Dowolny układ sił
mo
ż
na zredukowa
ć
do skr
ę
tnika.
(
)
n
1
P
........
P
(
)
(
)
.
,
3
2
1
n
1
Q
,
Q
Q
P
........
P
≡
∨
∈
E
S
1
S
Q
F
=
,
S
3
2
S
F
)
Q
,
Q
(
Mom
M
λ
=
=
Dowód wynika z przedstawionego powy
ż
ej toku rozumowania.
tzn. , .
Redukcja układu sił - prosta centralna, skr
ę
tnik
prosta centralna
S(x
1S
, x
2S
, x
3S
)
S
1
S
M
M
=
S
F
≡≡≡≡
24
Przypadki szczególne skr
ę
tnika
Tw.
Centralny układ sił mo
ż
na zredukowa
ć
do
siły wypadkowej zaczepionej w
ś
rodku układu
S jest dowolnym punktem przestrzeni
0
M
S
≡
Je
ż
eli układ sil redukuje si
ę
do jednej siły skupionej to sił
ę
t
ę
nazywa si
ę
wypadkow
ą
S jest punktem prostej centralnej
a)
o
o
F
M
⊥
(
)
( )
1
n
1
Q
P
........
P
≡
1
S
Q
F
=
,
l
S
∈
0
M
S
≡
0
Q
Q
3
2
≡
≡
b)
0
0
=
≠
o
o
M
,
F
1
S
Q
F
=
,
3
E
S
∈
,
0
Q
Q
3
2
≡
≡
,
0
0
≠
≠
o
o
M
,
F
P
i
P
n
P
1
P
P
,
∑
=
=
=
n
1
i
i
O
P
F
P
.
0
=
=
∑
=
n
1
i
i
A
O
P
Mom
M
s
F
prosta centralna
O
l
S(x
1S
, x
2S
, x
3S
)
o
F
o
M
1
x
2
x
3
x
s
F
O
S(x
1S
, x
2S
, x
3S
)
1
x
2
x
3
x
o
F
1. Redukcja do siły skupionej:
25
Nie mo
ż
na okre
ś
li
ć
rzutu
na kierunek
.
3
x
O
S(x
1S
, x
2S
, x
3S
)
2
x
1
x
o
M
.
0
0
≠
=
O
O
M
,
F
o
M
o
F
,
0
F
S
=
,
3
E
S
∈
S jest dowolnym punktem przestrzeni .
,
0
Q
1
≡
)
Q
,
Q
(
Mom
P
Mom
M
3
2
S
n
1
i
i
S
S
=
=
∑
=
2. Redukcja do pary sił (momentu):
(
)
(
)
3
2
n
1
Q
Q
P
........
P
,
≡
s
M
3. Układ sił równowa
żą
cych si
ę
:
0
M
F
o
o
≡
=
Przykład redukcji układu sił :
Przypadki szczególne skr
ę
tnika
P
a
P
M
=
P
a
P
M
=
P
P
-
P
a
P
≡≡≡≡
≡≡≡≡
≡≡≡≡
26
Redukcja układu sił
PRZEKSZTAŁCENIA ELEMENTARNE
Redukcj
ę
układu sił – zast
ą
pieniem danego układu sił układem statycznie mu równowa
ż
nym –
mo
ż
na przeprowadzi
ć
przez zastosowanie tzw. przekształce
ń
elementarnych, które wynikaj
ą
z poprzednio udowodnionych twierdze
ń
Przekształcenia dotycz
ą
ce siły, układu sił
1.Dan
ą
sił
ę
mo
ż
emy przesuwa
ć
wzdłu
ż
prostej jej działania
2.Siły le
żą
ce na jednej linii prostej mo
ż
emy dodawa
ć
algebraicznie.
3.Kilka sił przyło
ż
onych w danym punkcie mo
ż
na zast
ą
pi
ć
sum
ą
geometryczn
ą
przyło
ż
on
ą
w tym samym punkcie
4.Do danego układu sił mo
ż
emy zawsze doda
ć
lub odj
ąć
układ zerowy
Przekształcenia dotycz
ą
ce pary sił
1.W danej parze sił mo
ż
na zmieni
ć
moduły i ramie pary w ten sposób, aby moment
pozostał stały
2.Dan
ą
par
ę
sił mo
ż
na dowolnie przenosi
ć
w płaszczy
ź
nie jej działania
3.Dan
ą
par
ę
sił mo
ż
na przenie
ść
do płaszczyzny do
ń
równoległej
27
Elementy statyki 3D
28
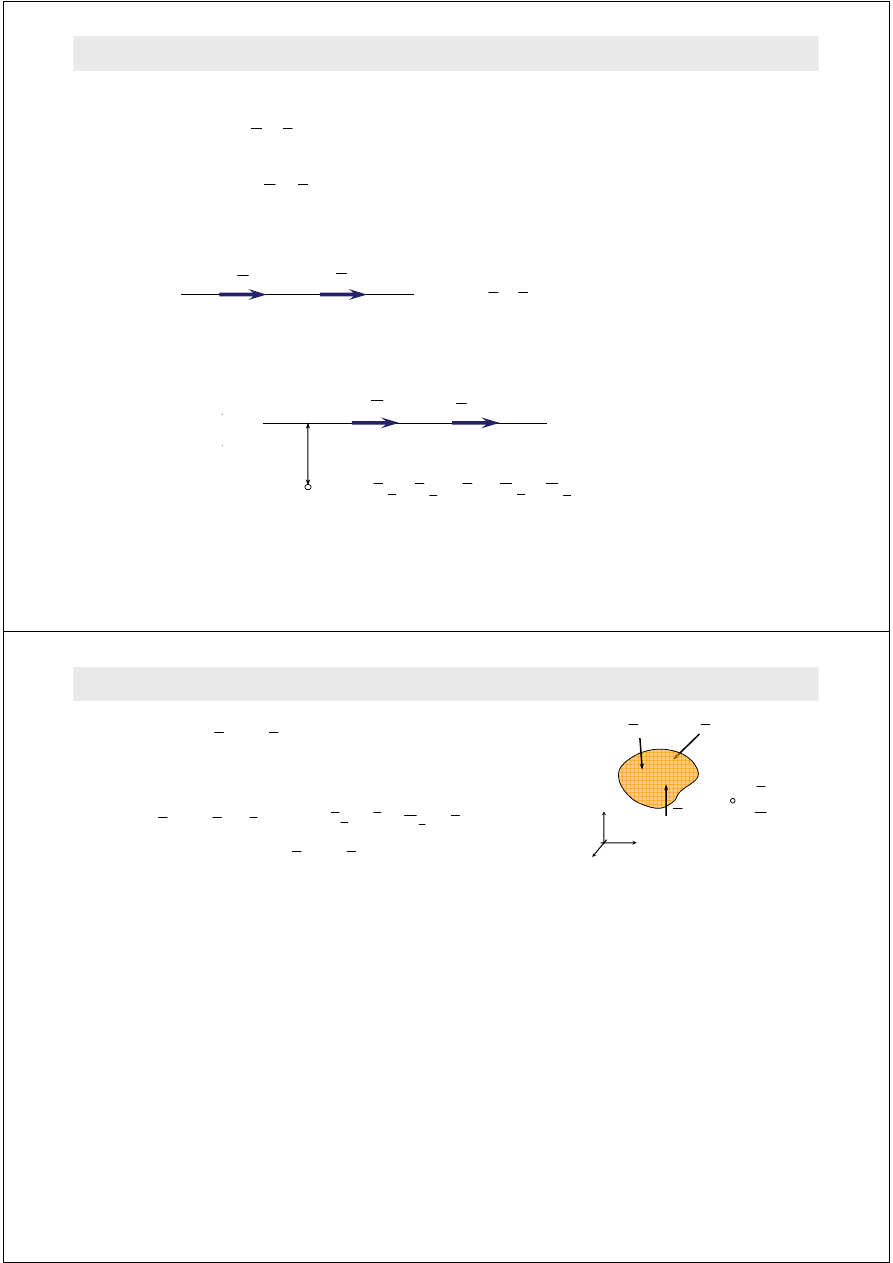
Def
, Momentem wektora wzgl
ę
dem osi
l
nazywamy wektor posuwny osi
l
,
którego reprezentantem jest wektor
AB
l
O
l
l
∈
=
O
),
(
AB
Mom
rzut
AB
Mom
nie zale
ż
y od wyboru punktu O.
AB
Mom
l
A
B
O’
l
π
O
AB
Mom
O
AB
Mom
l
o
Moment wektora wzgl
ę
dem osi
29
to z dokładno
ś
ci
ą
do punktu zaczepienia jest
Prawdziwe jest twierdzenie:
Tw.
Je
ż
eli płaszczyzna
π
jest prostopadła do prostej
l
,
l
,
'
∩
=
=
π
π
O
AB
rzut
'
B
'
A
B'
A'
Mom
AB
Mom
O'
l
=
Dowód pomijamy
A
B
A’
B’
O’
l
π
AB
Mom
l
o
Moment wektora wzgl
ę
dem osi
30
gdzie: – dowolne wektory przesuwne lub zaczepione,
α ∈
R .
to z dokładno
ś
ci
ą
do punktu zaczepienia jest
nie zale
ż
y od wyboru punktu O.
Prawdziwe jest twierdzenie:
Tw.
Je
ż
eli płaszczyzna
π
jest prostopadła do prostej
l
,
l
,
'
∩
=
=
π
π
O
AB
rzut
'
B
'
A
B'
A'
Mom
AB
Mom
O'
l
=
Uwaga: Moment wektora wzgl
ę
dem osi ma własno
ść
liniowo
ś
ci
AB
Mom
l
Dowód pomijamy
b
a
,
a
α
a
α
l
l
Mom
Mom
=
)
(
b
a
b
a
l
l
l
Mom
Mom
Mom
+
=
+
)
(
A
B
A’
B’
O’
l
π
O
AB
Mom
O
AB
Mom
l
o
AB
Mom
l
o
Moment wektora wzgl
ę
dem osi
Def
, Momentem wektora wzgl
ę
dem osi
l
nazywamy wektor posuwny osi
l
,
którego reprezentantem jest wektor
AB
l
O
l
l
∈
=
O
),
(
AB
Mom
rzut
AB
Mom
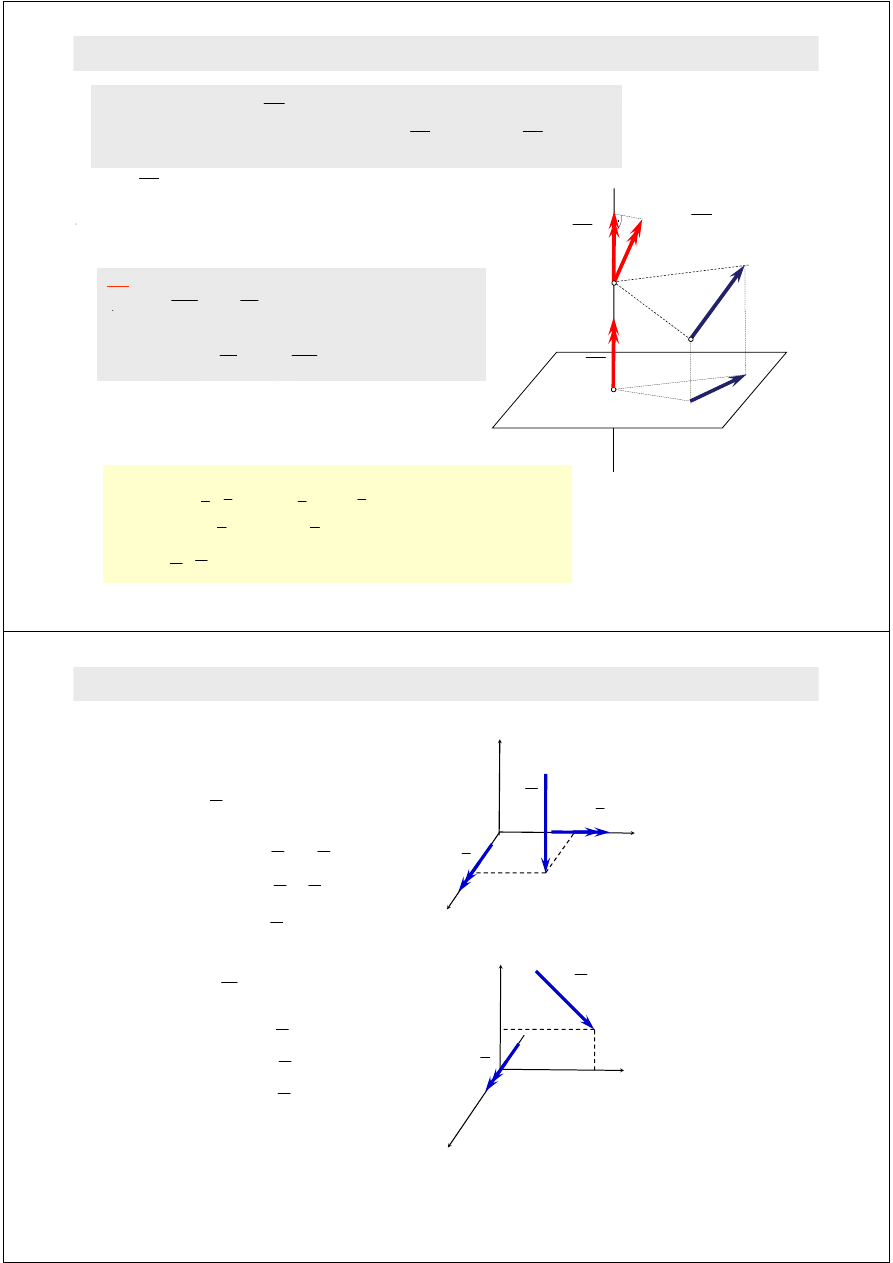
31
Przypadki szczególne poło
ż
enia siły
1)
3
|| Ox
P
b
a
P
P
Mom
2
P
Mom
1
x1
x2
2)
0
0
0
3
2
1
=
=
=/
P
Mom
P
Mom
P
Mom
P
x2
P
Mom
1
Moment wektora wzgl
ę
dem osi
b
P
P
Mom
−
=
1
a
P
P
Mom
=
2
0
3
=
P
Mom
3
2
x
Ox
P
∈
32
x
1
x
3
x
3
Warunki równowa
ż
no
ś
ci zeru układu sił
: , , gdzie A jest dowolnym punktem,
w przypadku układu stacjonarnego
stanowi
ą
konieczne i wystarczaj
ą
ce warunki istnienia poło
ż
enia równowagi.
Warunkiem koniecznym istnienia stanu równowagi sztywnego
układu materialnego
µ
, w przedziale czasu T, pod działaniem
układu obci
ąż
e
ń
jest równowa
ż
no
ść
zeru układu
sił b
ę
d
ą
cych obci
ąż
eniem
µ
, w przedziale
T=< t
1
, t
2
>.
, - wektor główny i moment główny układu obci
ąż
e
ń
w punkcie C
c
F
c
M
)
)
(
2
1
3
2
1
M
,
M
,
P
,
P
,
P
(
Q
=
Warunkiem wystarczaj
ą
cym istnienia stanu równowagi,
w przedziale czasu
T
, jest równo
ść
zeru
pr
ę
dko
ś
ci pocz
ą
tkowych (w chwili
t
1
) elementów układu.
0
F
A
=
0
M
A
=
)
Q
(
)
Q
(
C
1
P
3
P
2
P
C
M
C
F
1
M
2
M
Warunki równowa
ż
no
ś
ci zeru układu sił
Dany jest układ obci
ąż
e
ń
:
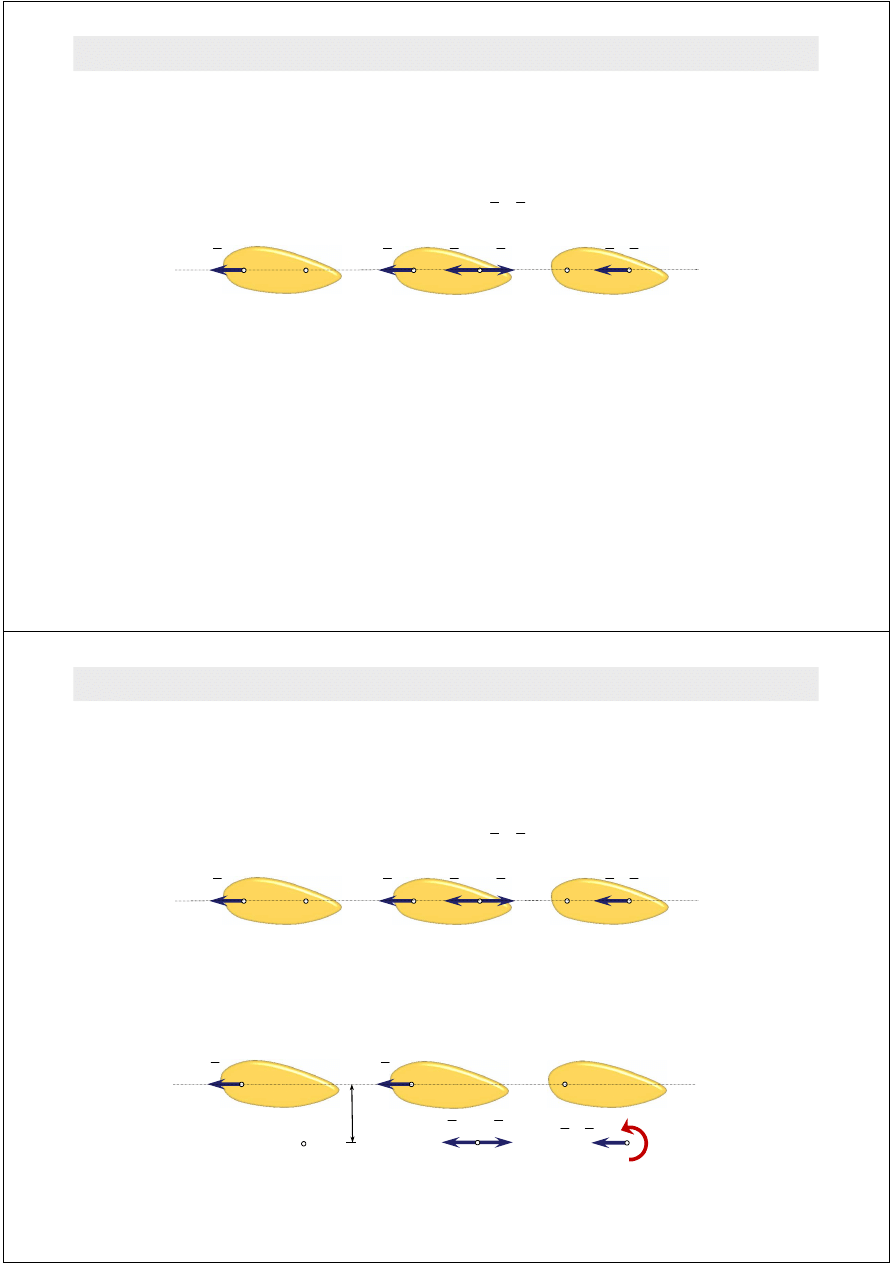
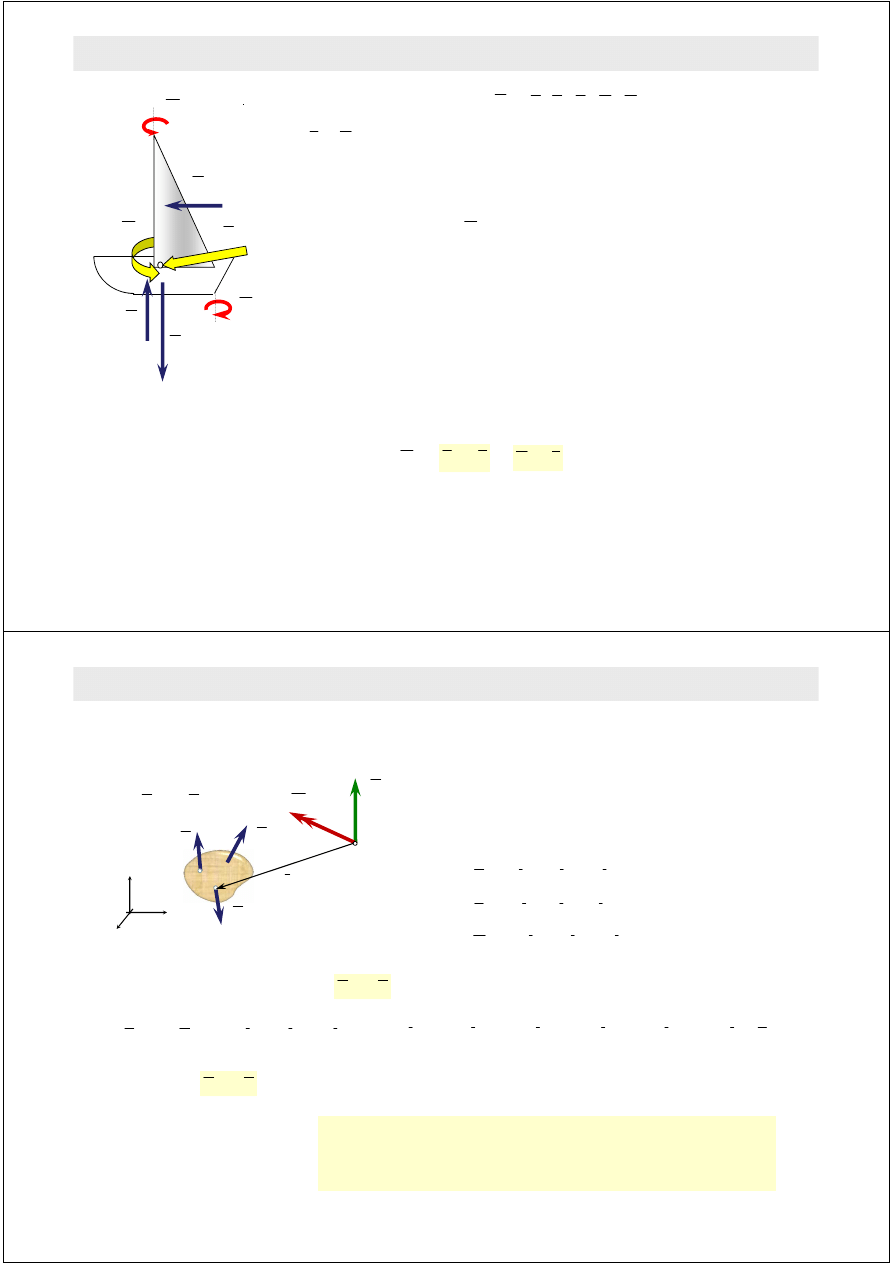
Ż
aglówka na wodzie jest przykładem
układu materialnego niestacjonarnego
.
W dalszej cz
ęś
ci zajmujemy si
ę
układami stacjonarnymi, których ruch wskutek
nało
ż
onych wi
ę
zów jest niemo
ż
liwy.
33
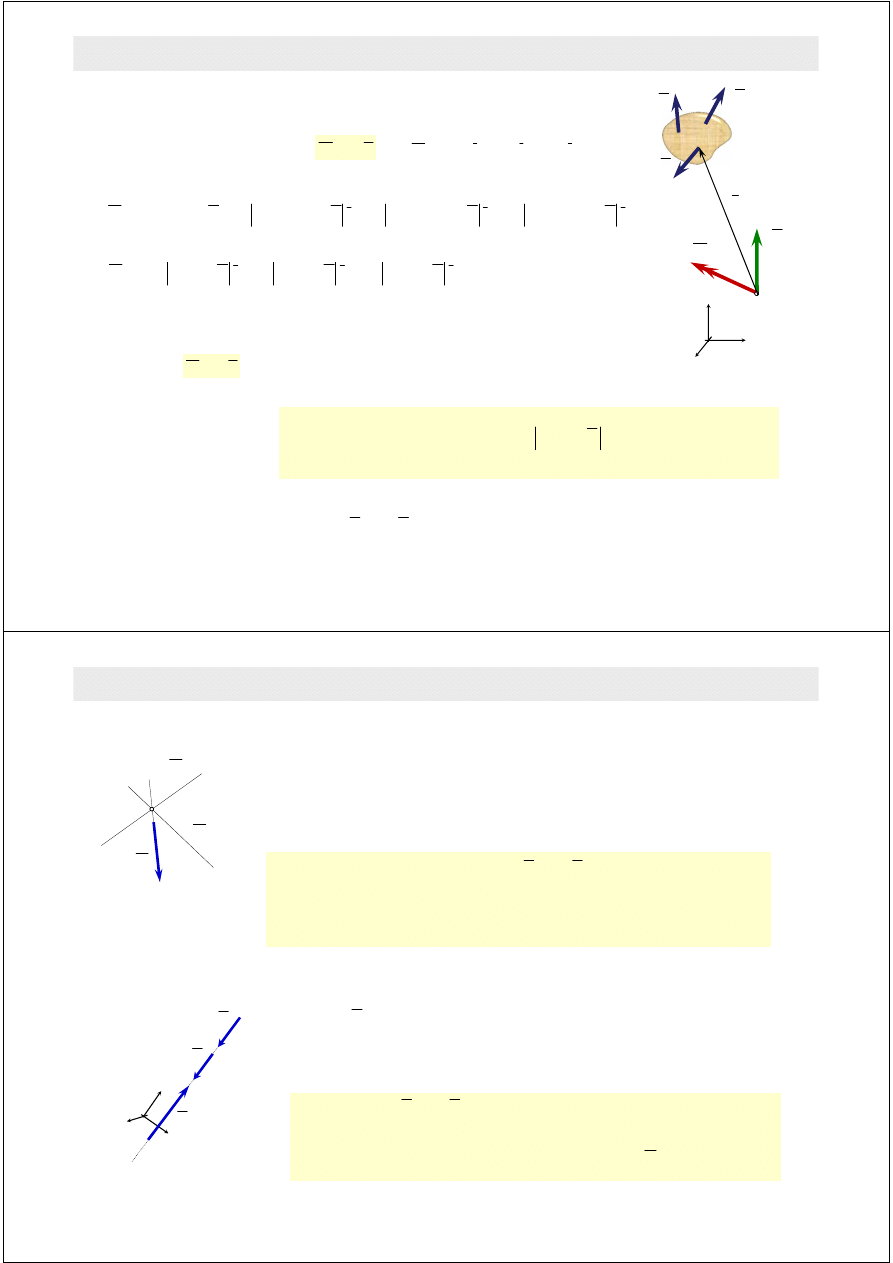
1.1. Wektor główny równy zeru: ,
)
P
.......
P
(
n
1
3
3
2
2
1
1
A
i
F
i
F
i
F
F
+
+
=
3
3
2
2
1
1
A
i
M
i
M
i
M
M
+
+
=
W dowolnym układzie obci
ąż
e
ń
, momenty skupione
mo
ż
na zast
ą
pi
ć
odpowiadaj
ą
cymi im parami sił,
które dodajemy do układu sił. W dalszej cz
ęś
ci
rozpatrujemy powstały w ten sposób, równowa
ż
ny układ sił
3
x
1
x
2
x
W układzie współrz
ę
dnych kartezja
ń
skim
3
2
1
x
x
Ox
3
3i
2
2i
1
1i
i
i
P
i
P
i
P
P
+
+
=
0
A
F
=
∑
∑
=
=
=
+
+
=
=
n
1
i
3
3i
2
2i
1
1i
n
1
i
i
A
)
i
P
i
P
i
(P
P
F
∑
∑
∑
∑
∑
∑
≡
+
+
=
+
+
=
=
=
0
i
X
i
X
i
X
i
P
i
P
i
P
3
3
2
2
1
1
n
1
i
n
1
i
n
1
i
3
3i
2
2i
1
1i
1. Przestrzenny dowolny układ sił
µ
A
A
M
A
F
1
P
i
P
2
P
i
r
Warunki równowa
ż
no
ś
ci zeru układu sił
=
=
=
∑
∑
∑
0
X
0
X
0
X
3
2
1
, gdzie: , ,
∑
∑
=
=
n
1
i
α
i
α
P
X
1,2,3
α
=
i - numer punktu (1.1)
0
A
F
=
Z warunku , wynikaj
ą
równania:
34
Z warunku , wynikaj
ą
równania:
1.2. Moment główny równy zeru:
,
Warunki równowa
ż
no
ś
ci zeru układu sił
.
,
3
3
2
2
1
1
A
i
M
i
M
i
M
M
+
+
=
=
=
=
∑
∑
∑
0
M
0
M
0
M
3
2
1
, gdzie
∑
∑
=
=
n
1
i
i
X
α
α
P
Mom
M
1,2,3
α
=
(1.2)
∑
∑
∑
∑
=
=
=
=
+
+
=
=
n
1
i
3
A
n
1
i
2
A
n
1
i
1
A
n
1
i
i
A
A
P
Mom
P
Mom
P
Mom
P
Mom
M
i
rzut
i
rzut
i
rzut
x
x
x
3
2
1
0
∑
∑
∑
=
=
=
=
+
+
=
n
1
i
3
x3
n
1
i
2
x2
n
1
i
1
x1
P
Mom
P
Mom
P
Mom
i
i
i
M
A
A
A
M
A
F
1
P
i
P
2
P
i
r
0
A
M
=
3
x
1
x
2
x
µ
0
A
M
=
Tw.
Dowolny przestrzenny układ sił jest równowa
ż
ny zeru, wtedy i tylko wtedy gdy istnieje
przynajmniej jeden układu współrz
ę
dnych , dla którego spełnione s
ą
równania (1.1) i (1.2).
)
P
.......
P
(
n
1
3
2
1
x
x
Ox
1. Przestrzenny dowolny układ sił cd.
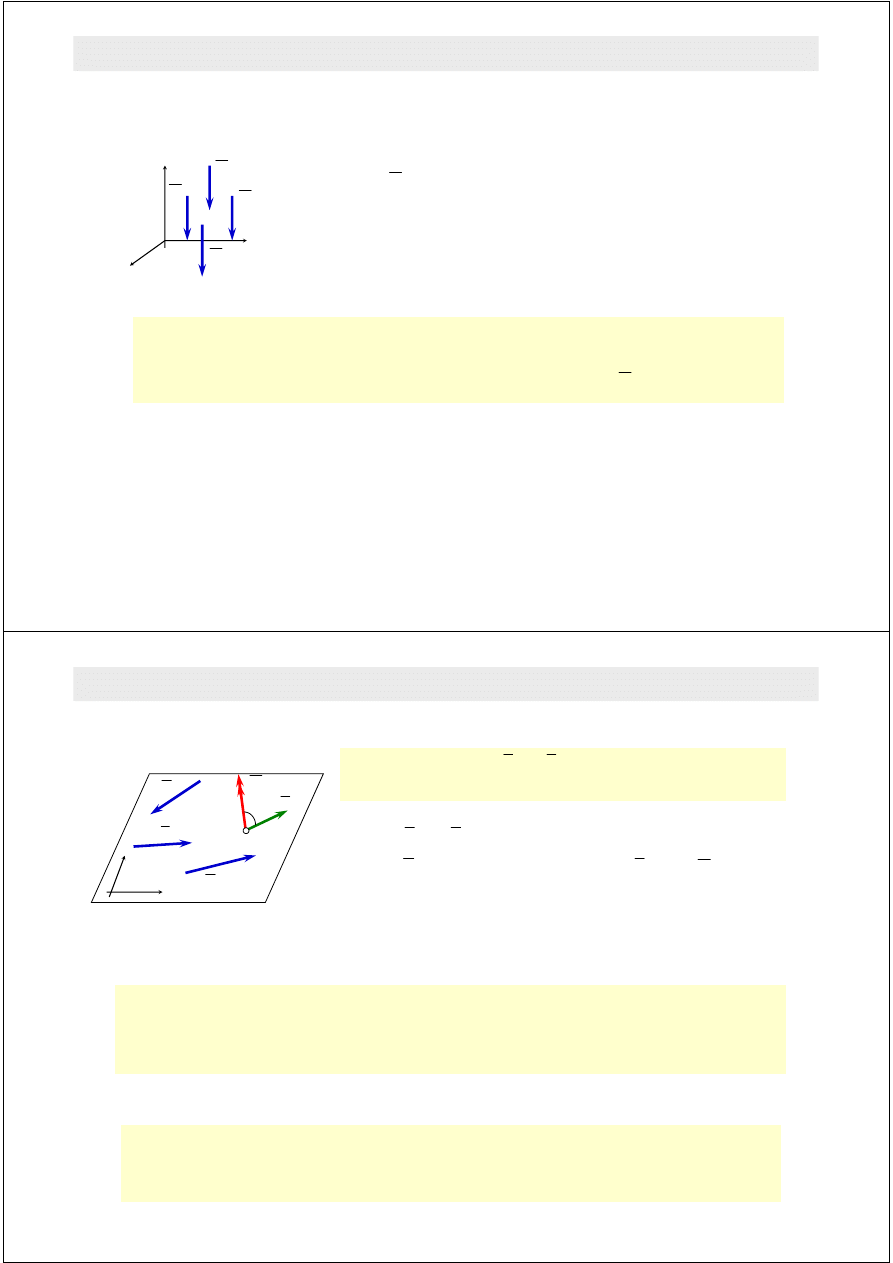
35
Tw.
Centralny przestrzenny układ sił
jest równowa
ż
ny
zeru je
ś
li istnieje taki układ
, w którym spełnione s
ą
równania:
A
i
P
2.
Przestrzenny centralny układ sił
n
P
1
P
W tym przypadku równania (1.2) s
ą
spełnione z zało
ż
enia, poniewa
ż
istnieje punkt,
punkt przeci
ę
cia kierunków sił, wzgl
ę
dem którego momenty wszystkich sił s
ą
równe
zeru.
Nie mo
ż
na wykorzysta
ć
równania
Σ
M
A
=0 do wyznaczenia sił
poniewa
ż
A le
ż
y
na kierunku działania sił. Wobec tego liczba równa
ń
redukuje si
ę
do trzech
∑
∑
∑
=
=
=
0
X
0
X
0
X
3
2
1
,
,
)
n
P
.......
1
P
(
3
x
2
x
1
Ox
(2)
Warunki równowa
ż
no
ś
ci zeru układu sił
Tw.
Układ sił
współosiowych jest równowa
ż
ny
zeru
⇔
spełnione s
ą
równania:
Je
ż
eli
równania (2)
1
i (2)
2
s
ą
spełnione z zało
ż
enia,
poniewa
ż
w rozwa
ż
anym układzie współrz
ę
dnych składowe sił,
prostopadłe do
Ox
3
, s
ą
równe zeru. Pozostaje wi
ę
c jedno równanie.
1
P
n
P
2
P
3
x
1
x
2
x
3. Układ sił współosiowych
3
i
Ox
||
P
)
P
.......
P
(
n
1
∑
=
0
X
3
Uwaga: przyj
ę
to
3
i
Ox
||
P
(3)
36
Je
ż
eli
, z definicji układu sił
równoległych wynika, i
ż
spełnione s
ą
warunki:
Równa
ń
tych nie mo
ż
na wykorzysta
ć
do
wyznaczenia sił,
4.
Przestrzenny układ sił równoległych
1
P
i
P
2
x
3
x
n
P
1
x
2
P
3
i
Ox
||
P
=
=
=
∑
∑
∑
0
M
0
X
0
X
3
2
1
Tw.
Przestrzenny układ sił równoległych jest równowa
ż
ny zeru je
ś
li istnieje taki układ ,
w którym spełnione s
ą
równania:
3
2
1
x
x
Ox
∑
∑
∑
=
=
=
0
M
0
M
0
X
2
1
3
,
,
Uwaga: przyj
ę
to
3
i
Ox
||
P
wobec tego liczba równa
ń
redukuje si
ę
do trzech.
(4)
Warunki równowa
ż
no
ś
ci zeru układu sił
37
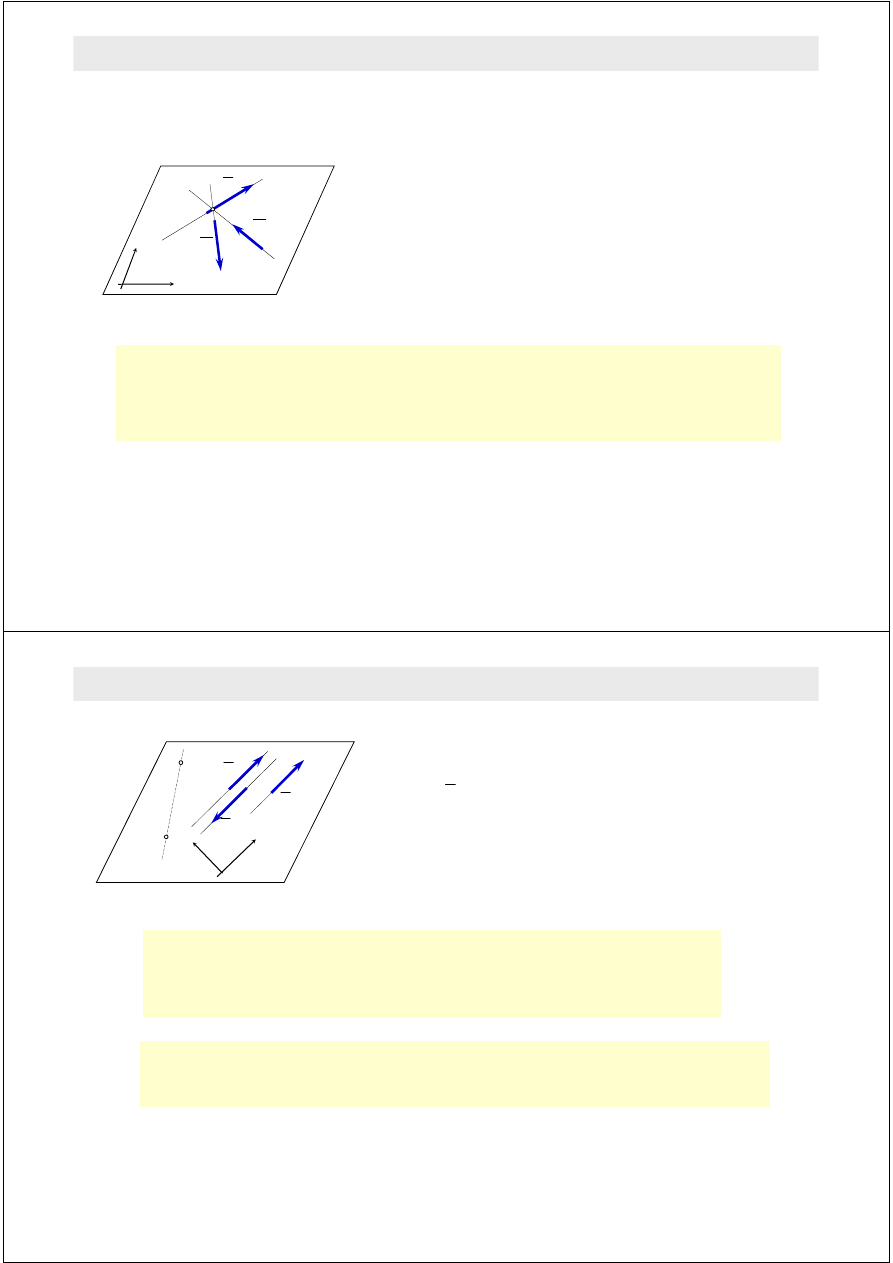
Tw.
Płaski układ sił zawarty na płaszczy
ź
nie
π
jest równowa
ż
ny zeru wtedy i tylko wtedy,
gdy istnieje układ parametryzuj
ą
cy
π
oraz punkt A
∈
π
taki,
ż
e spełnione s
ą
równania:
Z definicji płaskiego układu sił na płaszczy
ź
nie
wynika
Je
ś
li
jest płaskim układem sił na płaszczy
ź
nie
π
, tzn.
Def.
Płaski układ sił
to układ sił, którego wszystkie
wektory zawarte s
ą
na jednej płaszczy
ź
nie.
5.
Płaski dowolny układ sił
)
P
.......
P
(
n
1
)
P
.......
P
(
n
1
n
i
P
i
......
1
,
π
=
∈
wtedy
π
π
,
π
⊥
∈
∧
∈
A
A
A
M
F
2
1
x
Ox
,
,
,
∑
∑
∑
=
=
=
0
M
0
M
0
X
2
1
3
2
1
x
Ox
,
Uwaga Warunki (5) s
ą
równowa
ż
ne nast
ę
puj
ą
cym równaniom:
=
=
=
∑
∑
∑
0
M
0
M
0
X
B
A
1
pod warunkiem,
ż
e
prosta AB nie jest
prostopadła do osi
1
Ox
(5.1)
=
=
=
∑
∑
∑
0
M
0
M
0
M
C
B
A
pod warunkiem,
ż
e
punkty A,B,C
s
ą
niewspółliniowe
∑
∑
∑
=
=
=
0
M
0
X
0
X1
A
2
,
,
(5)
(5.2)
Warunki równowa
ż
no
ś
ci zeru układu sił
π
A
M
A
1
P
A
F
i
P
n
P
38
x
1
x
2
gdzie
A
jest punktem wspólnym kierunków sił.
Spo
ś
ród trzech równa
ń
(5) pozostaj
ą
tylko dwa:
Tw
. Płaski centralny układ sił zawarty na płaszczy
ź
nie
π
jest równowa
ż
ny zeru wtedy i tylko wtedy,
gdy istnieje układ współrz
ę
dnych
parametryzuj
ą
cy
π
taki,
ż
e:
6. Płaski centralny układ sił
Z definicji centralnego układu sił wynika, i
ż
spełniony
jest warunek
∑
=
0
M
A
2
1
x
Ox
∑
∑
=
=
0
X
0
X
2
1
,
(6)
i
P
A
π
n
P
1
P
Warunki równowa
ż
no
ś
ci zeru układu sił
39
x
1
x
2
Je
ż
eli
, z definicji układu sił równoległych wynika,
i
ż
spełniony jest warunek:
B
A
π
i
P
1
P
n
P
2
x
1
x
7.
Płaski układ sił równoległych
1
i
Ox
||
P
,
∑
=
0
X
2
wobec tego pozostaj
ą
dwa równania równowagi.
2
1
x
Ox
Tw
. Płaski układ sił równoległych jest równowa
ż
ny zeru je
ś
li istnieje taki układ
oraz punkt A
∈
π
, w którym spełnione s
ą
równania:
∑
∑
=
=
0
M
0
X
A
1
,
lub istniej
ą
dwa punkty A, B
∈
π
, takie,
ż
e AB nierównoległe do Ox
1
oraz spełnione s
ą
równania:
(7.2)
(7.1)
∑
∑
=
=
0
M
0
M
B
A
,
Warunki równowa
ż
no
ś
ci zeru układu sił
40
Def.
Wi
ę
zy nało
ż
one na punkt O nazywamy idealnymi, je
ś
li :
- wektor siły reakcji jest prostopadły do powierzchni, b
ą
d
ź
krzywej, stanowi
ą
cej wi
ę
zy lub
- je
ś
li wi
ę
zy stanowi izolowany punkt.
Wi
ę
zy idealne nazywane s
ą
doskonałymi lub gładkimi.
Rozwa
ż
amy wi
ę
zy punktowe.
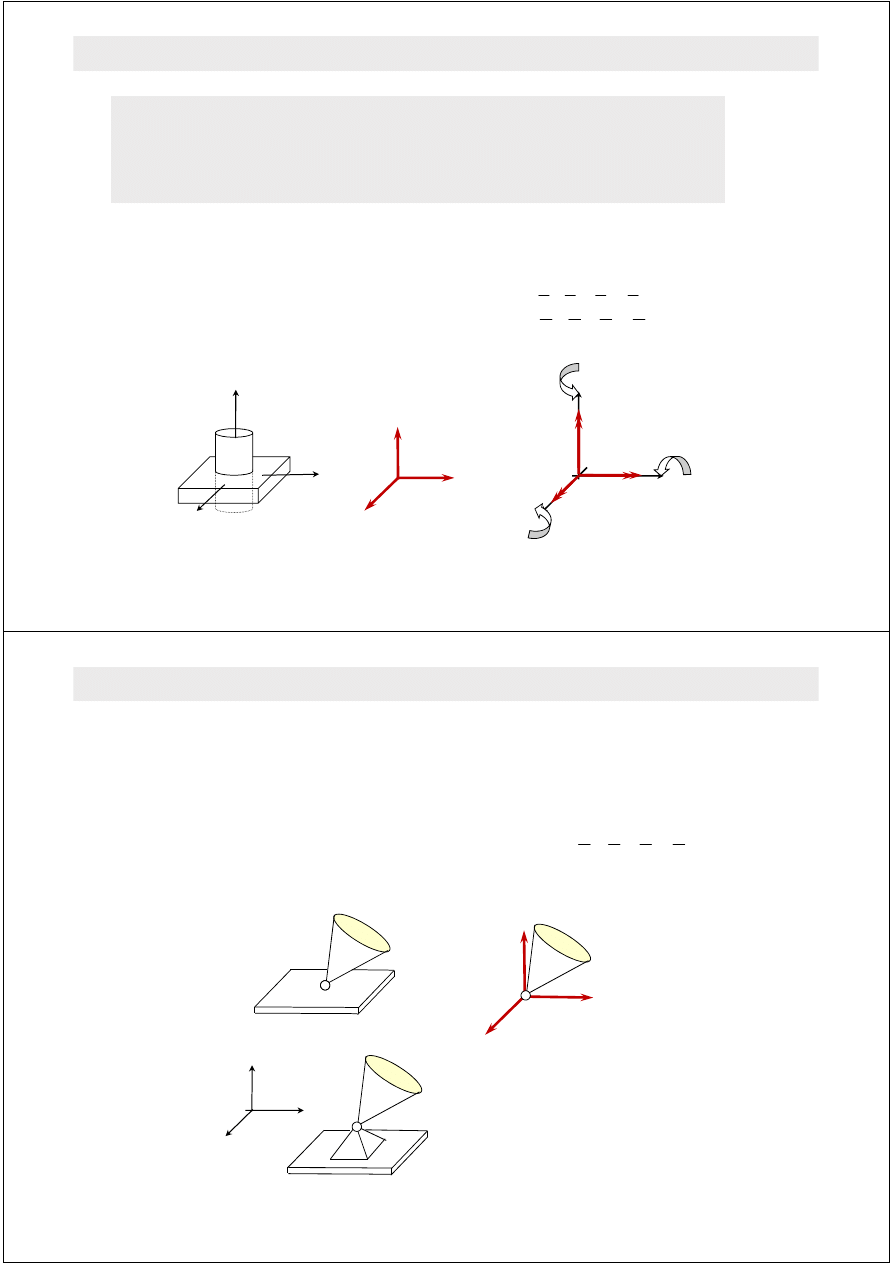
a) przestrzenne sztywne zamocowanie
Niewiadomych sze
ść
składowych reakcji
- nieznany kierunek siły reakcji (trzy niewiadome) :
- nieznany kierunek momentu utwierdzenia (trzy niewiadome) :
3
2
1
R
R
R
R
+
+
=
3
2
1
M
M
M
M
+
+
=
3
R
2
R
1
R
1
x
2
x
3
x
2
M
3
M
1
M
+
Wi
ę
zy idealne – przypadek przestrzenny
41
b) podparcie przegubowe nieprzesuwne
– uwolnione trzy stopnie swobody, ciało ma mo
ż
liwo
ść
ruchu obrotowego wzgl
ę
dem punktu
zamocowania
Niewiadome trzy składowe reakcji
- nieznany kierunek siły reakcji (trzy niewiadome) :
3
2
1
R
R
R
R
+
+
=
2
x
1
x
3
x
3
R
2
R
1
R
Wi
ę
zy idealne – przypadek przestrzenny
42
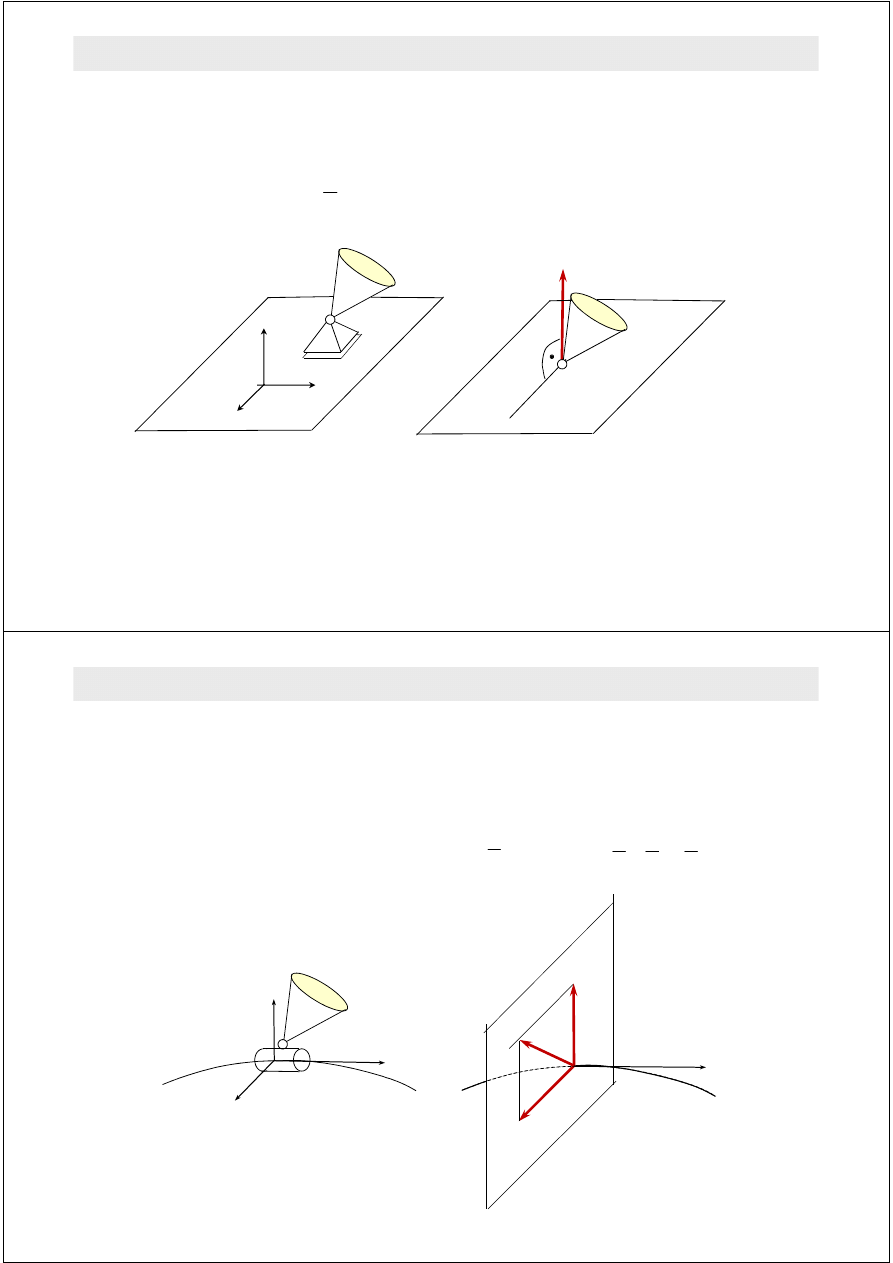
c) podparcie przegubowe z mo
ż
liwo
ś
ci
ą
przesuwu w dwóch kierunkach
- uwolnionych pi
ęć
stopni swobody, punkt podparcia ma mo
ż
liwo
ść
ruchu po powierzchni wi
ę
zu
S
Znany kierunek reakcji , prostopadły do powierzchni wi
ę
zu .
R
S – powierzchnia wi
ę
zu (powierzchnia mo
ż
liwego przesuwu punktu A)
2
x
1
x
3
x
S
R
S
Wi
ę
zy idealne – przypadek przestrzenny
43
d) podparcie przegubowe z jednokierunkowym przesuwem
- uwolnione cztery stopnie swobody, punkt podparcia ma mo
ż
liwo
ść
obrotu i ruchu po krzywej wi
ę
zu
α
Niewiadome dwie składowe reakcji - kierunek siły reakcji prostopadły do krzywej wi
ę
zu
α
.
Je
ż
eli o
ś
Ox
1
pokrywa si
ę
z kierunkiem stycznym
α
:
,
,
π
π
α
R
⊥
∈
3
2
R
R
R
+
=
α
- krzywa wi
ę
zu
3
x
1
x
2
x
α
3
R
1
R
2
x
α
R
π
Wi
ę
zy idealne – przypadek przestrzenny
44
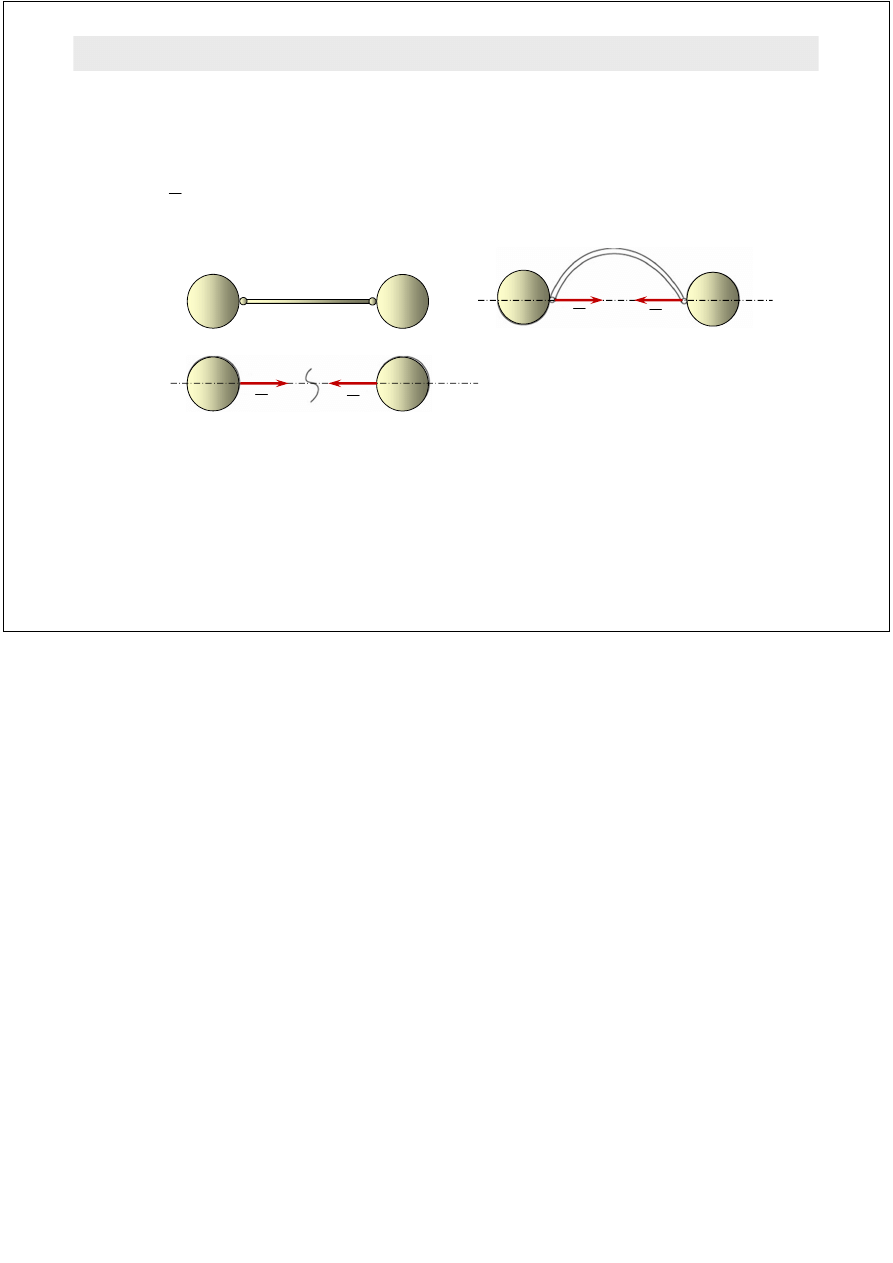
e) ci
ę
gno i pr
ę
t dwuprzegubowy
– uwolnione trzy stopnie swobody znany kierunek reakcji wzdłu
ż
prostej ł
ą
cz
ą
cej ko
ń
ce (przeguby) .
S
- siła reakcji wyra
ż
a sił
ę
wewn
ę
trzn
ą
(naci
ą
g) ci
ę
gna lub pr
ę
ta
Wi
ę
zy idealne – przypadek przestrzenny
S
S
S
S
45
Wyszukiwarka
Podobne podstrony:
14 WMiMB w4 Tarcie
Lekcja 14, Studia, Projektowanie 3d
Pedagogika porównawcza W3$ 03 14
14 statyka i dynamika płynów
02 14 podstawy statyki zadanie 14
Logika W3 2013 14 ppt
W3 Praktyczne zastosowanie pomiarów i ćwiczeń w warunkach statyki i izokinetyki w postępowaniu fizjo
FP W3 Syst fin publ 21 01 14
Przestrzenie 3D
wyklad 14
Vol 14 Podst wiedza na temat przeg okr 1
Metoda magnetyczna MT 14
więcej podobnych podstron