Bry³a sztywna. Ruch postêpowy i obrotowy
W paragrafie 1.2 dokonaliœmy podzia³u ruchów na postêpowe i obrotowe.
Wszystkie punkty cia³a poruszaj¹cego siê ruchem postêpowym zakreœlaj¹ tory
o identycznym kszta³cie i jednakowej d³ugoœci. Ruch postêpowy cia³a mo¿na wiêc
opisywaæ jako ruch punktu materialnego, czyli obiektu o pomijalnie ma³ych roz-
miarach i objêtoœci, a masie równej masie cia³a.
Do opisu ruchu obrotowego wprowadza siê w fizyce pojêcie bry³y sztywnej –
cia³a, w którym odleg³oœci miêdzy poszczególnymi jego elementami nie zmieniaj¹
siê, pomimo si³ dzia³aj¹cych na cia³o podczas ruchu. Zarówno punkt materialny,
jak i bry³a sztywna – to modele, za pomoc¹ których przedstawiamy cia³a rze-
czywiste.
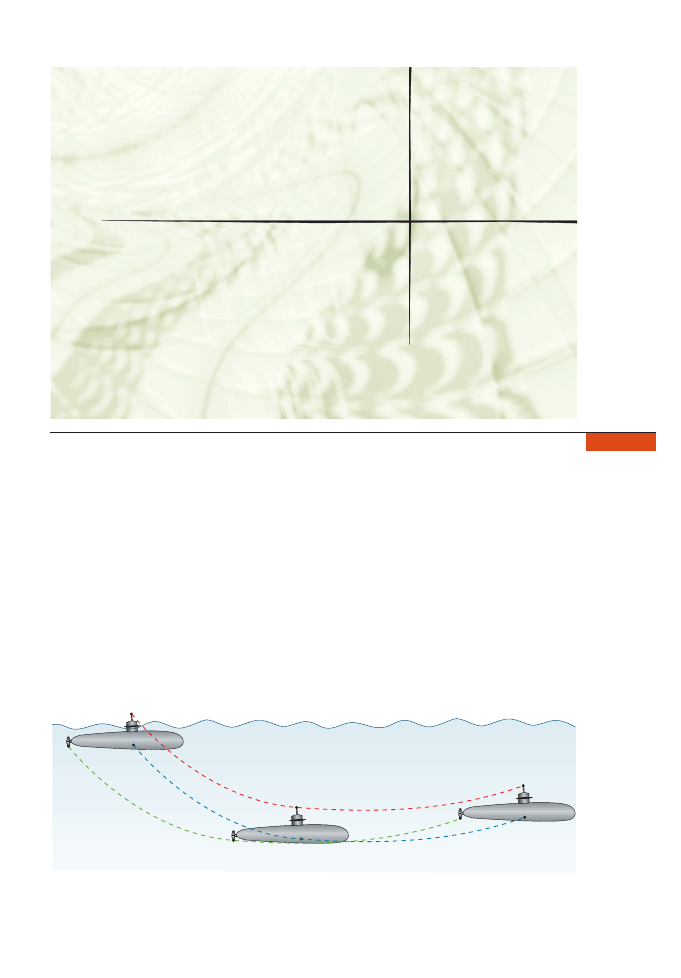
Na rysunku 1. przedstawiono ruch postêpowy ³odzi podwodnej. Zauwa¿, ¿e od-
cinek ³¹cz¹cy dwa dowolnie wybrane punkty (np. P
1
i P
2
), w dowolnej chwili ruchu,
Mechanika bry³y sztywnej
Uzupe³nienie
1
1
mechanika
bry³y sztywnej
u z u p e ³ n i e n i e
P
1
P
1
P
1
P
2
P
2
P
2
P
3
P
3
P
3
Rys. 1
jest równoleg³y do odcinka, który ³¹czy³ te punkty w poprzednich chwilach ruchu,
czyli odcinek ten przemieszcza siê równolegle.
Podczas ruchu obrotowego bry³y sztywnej wokó³ prostej, zwanej osi¹ obrotu,
wszystkie punkty bry³y nie nale¿¹ce do osi zakreœlaj¹ okrêgi (lub ³uki okrêgów)
w p³aszczyznach prostopad³ych do osi obrotu. (Punkty nale-
¿¹ce do osi pozostaj¹ nieruchome.)
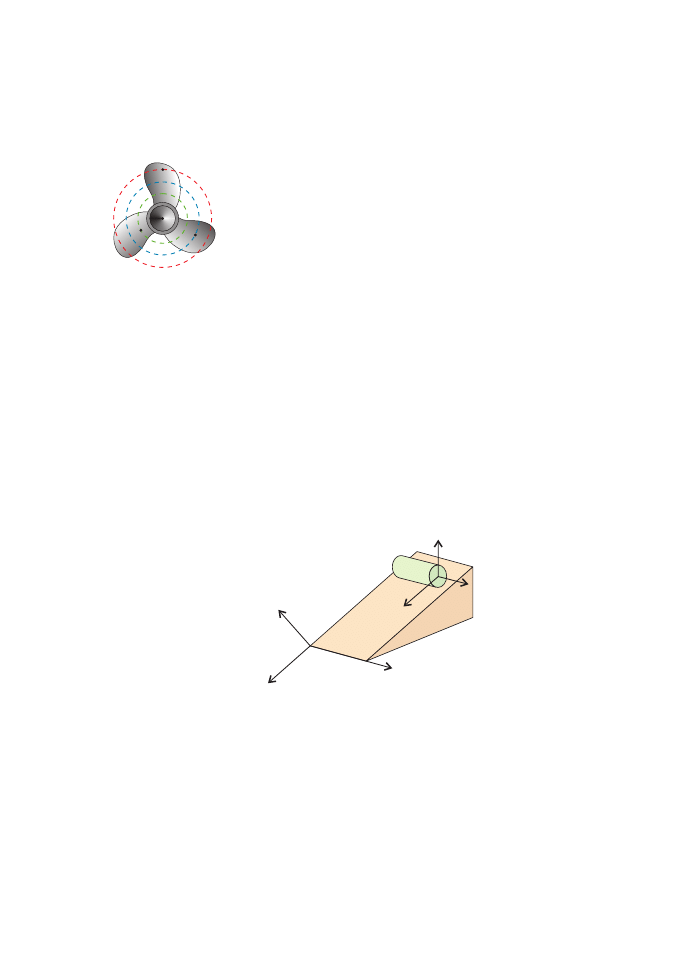
Na rysunku 2. zaznaczono tory trzech punktów wirnika, ob-
racaj¹cego siê wokó³ osi obrotu przechodz¹cej przez punkt O
i prostopad³ej do p³aszczyzny rysunku.
W ¿yciu codziennym mamy czêsto do czynienia z ruchami
z³o¿onymi. Opis takich, czasem doœæ skomplikowanych ru-
chów u³atwia mo¿liwoœæ roz³o¿enia ich na ruch postêpowy
i obrotowy, wzglêdem odpowiednio wybranego uk³adu odnie-
sienia. Przyk³adem ruchów z³o¿onych mo¿e byæ ruch ko³a
jad¹cego pojazdu lub tocz¹cej siê po pod³odze pi³ki.
Nasze rozwa¿ania ograniczymy tylko do obrotów wokó³ ustalonej osi (czyli ta-
kiej, która nie zmienia swego po³o¿enia wzglêdem cia³a, ani orientacji w uk³adzie
odniesienia, w którym rozwa¿amy ruch) i tylko o takich obrotach bêdziemy mówiæ
w nastêpnych paragrafach.
Z dotychczasowej nauki wiesz, ¿e nied³¹czn¹ cech¹ ruchu jest jego wzglêdnoœæ.
Z tego faktu wynika mo¿liwoœæ sk³adania (b¹dŸ rozk³adania) ruchów poprzez za-
stosowanie do opisu odpowiednio dobranych uk³adów odniesienia. W przypadku
z³o¿onych ruchów bry³y sztywnej szczególnie u¿yteczna jest mo¿liwoœæ rozk³adania
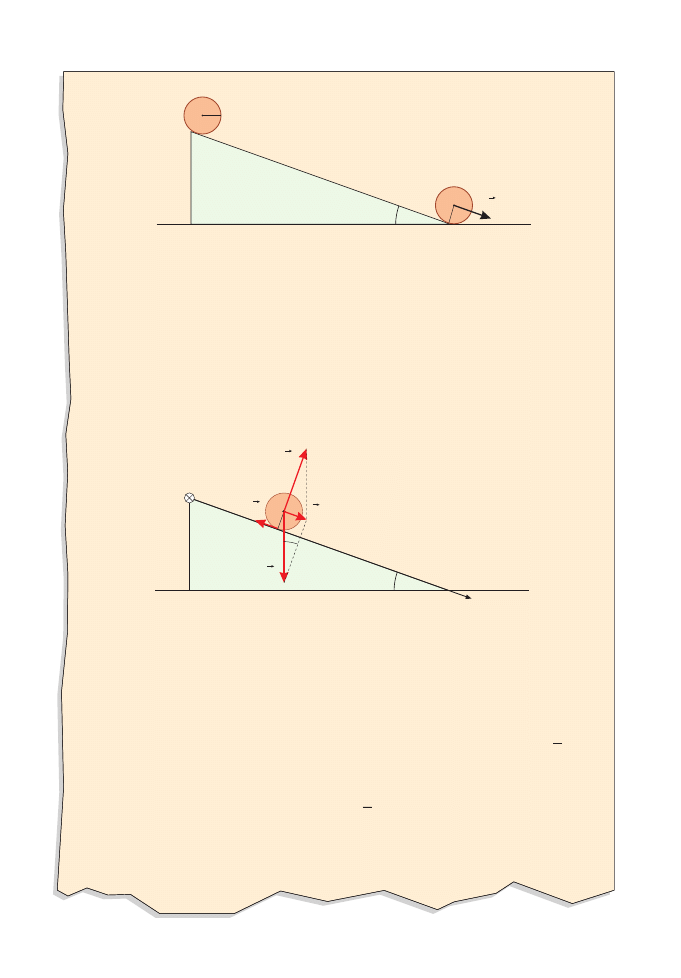
ich na sk³adowe, ³atwiejsze do opisu i analizy. Jako przyk³ad rozpatrzmy staczanie
siê walca z równi pochy³ej (rys. 3).
Jego ruch w uk³adzie odniesienia x y z, zwi¹zanym z równi¹, nie jest ani ruchem
postêpowym, ani obrotowym wokó³ sta³ej osi. Mo¿emy jednak wybraæ uk³ad odnie-
sienia
¢ ¢ ¢
x y z , który przesuwa siê równolegle do równi z prêdkoœci¹ liniow¹ równ¹
prêdkoœci œrodka walca. Uk³ad odniesienia
¢ ¢ ¢
x y z wykonuje ruch postêpowy
wzglêdem uk³adu xy z. Natomiast walec wykonuje ruch obrotowy wokó³ usta-
lonej osi w uk³adzie odniesienia
¢ ¢ ¢
x y z . W tym sensie ruch walca w uk³adzie xy z
traktowaæ mo¿na jako za³o¿enie ruchu postêpowego i obrotowego wokó³ usta-
lonej osi.
Uzupe³nienie
Mechanika bry³y sztywnej
2
P
1
O
P
2
P
3
rys. 2
z
y
x
z'
x'
y'
rys. 3
Wielkoœci kinematyczne w ruchu obrotowym
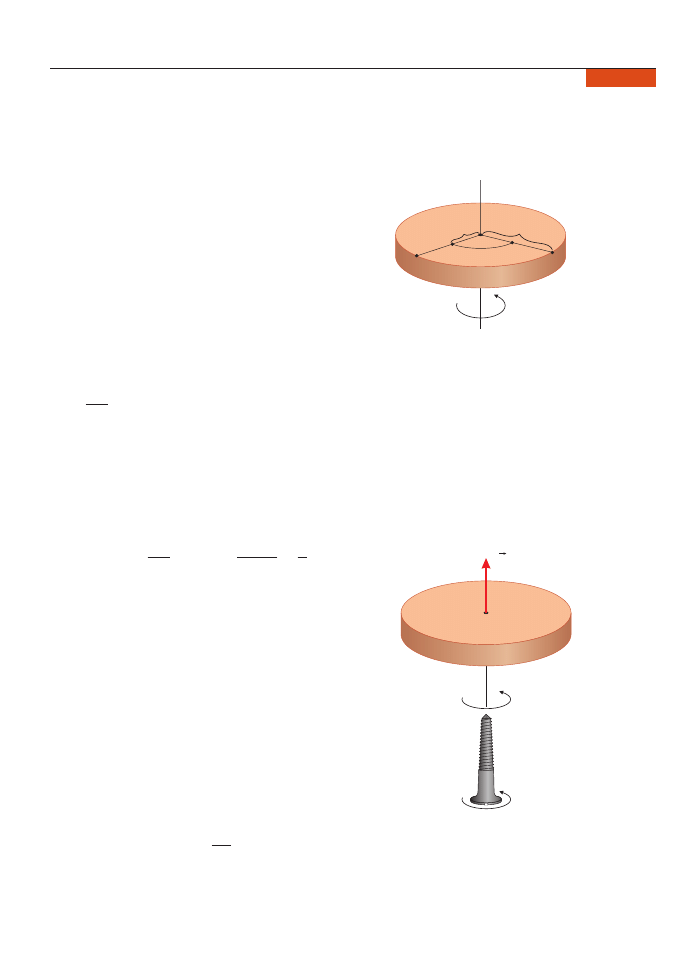
Analizuj¹c ruch punktu materialnego po okrêgu wprowadziliœmy pojêcie szyb-
koœci k¹towej. Zwróæmy uwagê, ¿e w przypadku ruchu obrotowego bry³y sztywnej
k¹ty zakreœlone w tym samym czasie przez promienie wodz¹ce ró¿nych punktów
bry³y s¹ takie same, natomiast drogi tzn. d³ugoœci
odpowiednich ³uków s¹ ró¿ne dla punktów znaj-
duj¹cych siê w ró¿nych odleg³oœciach od osi obro-
tu (rys. 4).
Po³o¿enie cia³a obracaj¹cego siê wokó³ sta³ej
osi obrotu jest wiêc ca³kowicie okreœlone przez
podanie k¹ta zakreœlonego przez promieñ wo-
dz¹cy dowolnego punktu bry³y a wiêc jednego k¹ta
wspólnego dla ca³ej bry³y. K¹t ten nazywamy
k¹tem obrotu bry³y. K¹t ten wyra¿amy w mierze
³ukowej (patrz Aneks 1.2).
Szybkoœci k¹towe ró¿nych punktów bry³y sztyw-
nej w jej ruchu obrotowym wokó³ sta³ej osi
w
a
=
æ
è
ç
ö
ø
÷
D
Dt
s¹ sobie równe, natomiast szybkoœci liniowe – nie. Bêdziemy zatem mó-
wiæ o szybkoœci k¹towej ca³ej bry³y (jednakowej dla wszystkich jej punktów w danej
chwili). Szybkoœæ k¹towa to, jak siê domyœlasz, wartoœæ wielkoœci wektorowej zwa-
nej prêdkoœci¹ k¹tow¹.
Œrednia prêdkoœæ k¹towa bry³y sztywnej jest to wektor
rw
œr
, którego:
a) wartoϾ
w
œr
równa siê stosunkowi k¹ta
Da zakreœlonego w pewnym czasie
Dt przez obracaj¹ce siê cia³o do tego czasu:
w
a
=
D
Dt
,
[ ]
w =
=
radian
s
s
1
(1)
b) kierunek pokrywa siê z kierunkiem osi obrotu,
c) zwrot jest zgodny z regu³¹ œruby prawo-
skrêtnej, która mówi, ¿e: jeœli œrubê usta-
wimy wzd³u¿ osi, to podczas jej obrotu
zgodnego z obrotem bry³y zwrot prêdkoœci
w ruchu postêpowym œruby wskazuje zwrot
wektora
rw (rys. 5).
Wektor chwilowej prêdkoœci k¹towej nazywa siê
krótko prêdkoœci¹ k¹tow¹ i oznacza przez
rw.
Okres obrotu T cia³a wokó³ nieruchomej osi jest
to czas, w którym cia³o obraca siê o k¹t pe³ny (2
p ra-
dianów). Je¿eli prêdkoœæ k¹towa tego ruchu jest
sta³a, to oczywiœcie sta³y jest okres T:
T
=
2
p
w
.
(2)
Taki ruch nazywamy ruchem obrotowym jednostajnym.
Mechanika bry³y sztywnej
Uzupe³nienie
3
2
w
œr
rys. 5
A
A'
B
B'
a
r
A
r
B
rys. 4
Do opisu niejednostajnych ruchów obrotowych wprowadza siê wektor przy-
spieszenia k¹towego.
r
r
e =
w
D
Dt
przy
Dt ® 0 .
(3)
Przyspieszenie k¹towe jest to stosunek przyrostu wektora prêdkoœci k¹towej
Drw do czasu Dt, w którym ten przyrost nast¹pi³.
W przypadku ruchu obrotowego niejednostajnego wokó³ sta³ej osi kierunek
wektora
rwpozostaje sta³y i w zwi¹zku z tym wektor rema równie¿ sta³y kierunek (te¿
równoleg³y do osi). Zwrot wektora
rejest zgodny ze zwrotem wektora rww przypadku
ruchu obrotowego przyspieszonego, a przeciwny – w przypadku ruchu obrotowego
opóŸnionego. W ruchu obrotowym przyspieszonym wzglêdem ustalonej osi
e =
w
D
Dt
,
[ ]
e =
=
radian
s
s
2
2
1
.
Musisz jednak wiedzieæ, ¿e nie zawsze tak jest – na ogó³ (gdy oœ obrotu nie jest
sta³a tzn. kierunek wektora zmienia siê) przyœpieszenie k¹towe ma inny kierunek
ni¿ prêdkoœæ k¹towa.
Energia kinetyczna bry³y sztywnej
Ca³kowita energia kinetyczna bry³y sztywnej rozumianej jako uk³ad (zbiór) n
sztywno ze sob¹ po³¹czonych punktów materialnych równa siê sumie energii kine-
tycznych tych punktów materialnych:
E
m
k
i
i
i
n
=
=
å
u
2
1
2
,
(4)
gdzie m
i
,
u
i
oznaczaj¹ odpowiednio masê i szybkoœæ liniow¹ i-tego punktu mate-
rialnego bry³y (
, , ... )
i
n
= 1 2
.
W ruchu postêpowym bry³y szybkoœci liniowe wszystkich jej punktów s¹ takie
same, zatem w ruchu postêpowym:
E
m
m
k
i
n
=
=
å
u
u
2
1
2
2
2
,
(5)
gdzie m
m
i
i
=
å
jest mas¹ ca³ej bry³y.
W ruchu obrotowym wokó³ sta³ej osi wartoœci prêdkoœci liniowych
u
i
ró¿nych
punktów bry³y s¹ ró¿ne ale mo¿na je ³atwo powi¹zaæ z szybkoœci¹ k¹tow¹ bry³y
(wzór (6)):
u
w
i
i
r
=
,
(6)
gdzie r
i
jest odleg³oœci¹ i-tego punktu od osi obrotu. Po podstawieniu (6) do (4)
otrzymujemy:
E
m r
k
i
n
=
=
å
w
2
1 1
2
1
2
.
(7)
Uzupe³nienie
Mechanika bry³y sztywnej
4
3
Suma, która wystêpuje w tym wzorze charakteryzuje bry³ê – jest miar¹ bez-
w³adnoœci cia³a w jego ruchu obrotowym wokó³ sta³ej osi (spe³nia tak¹ rolê w ruchu
obrotowym jak masa w ruchu postêpowym). Oznaczamy j¹ liter¹ I i nazywamy mo-
mentem bezw³adnoœci bry³y wzglêdem danej osi:
I
m r
i i
i
n
=
å
2
.
(8)
Wprowadzaj¹c to oznaczenie otrzymujemy wzór na energiê kinetyczn¹ ruchu
obrotowego o postaci analogicznej do znanej dla ruchu postêpowego:
E
I
k
=
w
2
2
.
(9)
Nie jest to jednak pe³na analogia. Zdefiniowany przez nas moment bezw³ad-
noœci bry³y nie jest wielkoœci¹ tak uniwersaln¹ jak masa – zale¿y on w istotny
sposób od tego wokó³ jakiej osi obraca siê bry³a.
Je¿eli w jakimœ uk³adzie odniesienia ruch bry³y mo¿na traktowaæ jako z³o¿enie
ruchu postêpowego i obrotowego wokó³ istalonej osi, to w tym uk³adzie odnie-
sienia ca³kowita energia kinetyczna bry³y równa siê sumie energii kinetycznych obu
rodzajów ruchu.
Momenty bezw³adnoœci niektórych bry³
Poni¿ej podajemy momenty bezw³adnoœci prostych bry³ (jednorodnych) wzglê-
dem osi przechodz¹cych przez œrodek masy tych bry³ i bêd¹cych ich osiami
symetrii (m – oznacza zawsze masê cia³a). Momenty bezw³adnoœci wymienione
w punktach a) i b) potrafisz obliczyæ samodzielnie, korzystaj¹c z diefinicji (8) – po-
zosta³e podajemy jako u¿yteczn¹ informacjê.
a) Cienka pêtla ko³owa o promieniu r; oœ obrotu prosto-
pad³a do powierzchni pêtli:
I
mr
=
2
.
(10)
b) Cienkoœcienna rura o promieniu r; oœ obrotu wzd³u¿ osi
geometrycznej rury:
I
mr
=
2
.
(11)
c) Prostoliniowy cienki prêt o d³ugoœci
l; oœ obrotu prosto-
pad³a do prêta:
I
m
=
1
12
2
l .
(12)
Mechanika bry³y sztywnej
Uzupe³nienie
5
4
R
O
R
l
l
1
1
2
2
oœ
d) Walec pe³ny o promieniu r, oœ obrotu wzd³u¿ osi geo-
metrycznej walca:
I
mr
=
1
2
2
.
(13)
e) Kula pe³na o promieniu r:
I
mr
=
2
5
2
.
(14)
Z definicji momentu bezw³adnoœci bry³y (i definicji œrodka masy) wynika jeszcze
jedno bardzo u¿yteczne twierdzenie (wzór Steinera): moment bezw³adnoœci I
cia³a wzglêdem dowolnej osi równa siê sumie momentu bezw³adnoœci I
0
tego
cia³a wzglêdem osi równoleg³ej do poprzedniej i przechodz¹cej przez œrodek
masy cia³a oraz iloczynu masy m cia³a i kwadratu odleg³oœci d pomiêdzy tymi
osiami:
I
I
md
= +
0
2
.
(17)
Wynika st¹d, ¿e moment bezw³adnoœci cia³a wzglêdem jakiejœ osi przecho-
dz¹cej przez œrodek masy cia³a jest zawsze mniejszy od momentu bezw³adnoœci
tego cia³a wzglêdem dowolnej innej równoleg³ej osi.
Korzystaj¹c z twierdzenia Steinera, oblicz:
a) moment bezw³adnoœci prêta wzglêdem osi prostopad³ej do prêta i przechodz¹cej przez jego koniec,
b) moment bezw³adnoœci walca wzglêdem jego tworz¹cej,
c) moment bezw³adnoœci kuli wzglêdem osi stycznej do jej powierzchni.
Przyczyny zmian ruchu obrotowego. Moment si³y
Jak wiesz, przyczyn¹ zmiany stanu ruchu postêpowego cia³a jest zawsze
dzia³anie niezerowej wypadkowej si³y. Zastanówmy siê, czy dzia³anie si³y jest te¿
warunkiem wystarczaj¹cym dla wprawienia bry³y w ruch obrotowy lub, ogólniej,
zmiany jej prêdkoœci k¹towej.
Uzupe³nienie
Mechanika bry³y sztywnej
6
R
oœ
R
O
oœ
ZADANIE
5
Na rys. 6 przedstawiono drzwi wahad³owe osadzone na zawiasach. Dzia³aj¹ca
na nie si³a (np.
r
F
1
) o kierunku zawartym w p³aszczyŸnie drzwi, nie spowoduje ¿ad-
nego ruchu, bo zostanie zrównowa¿ona przez si³ê dzia³aj¹c¹ na drzwi ze strony
zawiasów. Jeœli jednak zadzia³amy si³¹ o kierunku prostopad³ym do p³aszczyzny
drzwi (np.
r
F
2
), to nast¹pi obrót drzwi wokó³ osi przechodz¹cej przez zawiasy. Zatem
dzia³anie si³y na bry³ê jest warunkiem koniecznym, ale nie wystarczaj¹cym dla spo-
wodowania obrotu.
WyobraŸmy sobie, ¿e bry³a przedstawiona na rys. 7 mo¿e siê obracaæ wokó³ osi
przechodz¹cej przez punkt O. Punkt O jest punktem przeciêcia z osi¹ obrotu
p³aszczyzny zawieraj¹cej wektor si³y
r
F i prostopad³ej do osi.
Oznaczmy liter¹ P punkt zaczepienia si³y
r
F . Wektor o pocz¹tku w punkcie O
i koñcu w punkcie P oznaczmy przez
r
r . Iloczyn wektorowy wektorów
r
r i
r
F nazywamy
momentem si³y
r
F wzglêdem osi z i oznaczamy
r
M.
Wartoœæ momentu si³y dana jest wzorem:
M
r F
=
sin
a ,
gdzie
a jest k¹tem miêdzy wektorami
r
r i
r
F .
Aby zmieniæ stan ruchu obrotowego bry³y, dzia³aj¹ca na ni¹ si³a musi mieæ nie-
zerowy moment wzglêdem osi obrotu, a wiêc k¹t
a musi byæ ró¿ny od zera i od 180°.
Dla danej wartoœci si³y i danego
r
r moment si³y ma wartoœæ najwiêksz¹, gdy si³a
dzia³a prostopadle do wektora
r
r . Wówczas sin
sin (
)
a
p
=
=
2
1 i M
rF
= .
Kierunek wektora momentu si³y jest prostopad³y do p³aszczyzny utworzonej
przez wektory
r
r i
r
F , a jego zwrot zgodny z regu³¹ œruby prawoskrêtnej. Moment si³y
ma wiêc kierunek osi, wokó³ której obraca siê bry³a, a zwrot zgodny ze zwrotem
przyœpieszenia k¹towego
re (rys. 8).
Praca
DW momentu si³y przy obrocie cia³a o k¹t Da:
D
D
W
M
= × a
(18)
jest wykonana w pewnym czasie
Dt. Zatem dziel¹c obie strony wzoru (18) przed Dt
mo¿emy obliczyæ szybkoœæ wykonywania tej pracy, czyli moc œredni¹ P
œr
:
P
W
t
M
t
M
œr
œr
=
=
=
D
D
D
D
a
w
(19)
Mechanika bry³y sztywnej
Uzupe³nienie
7
F
1
oœ
F
2
Rys. 6
F
r
z
a
oœ obro tu
O
P
Rys. 7
Moc œrednia w ruchu obrotowym wokó³ sta³ej osi równa siê iloczynowi wartoœci
wypadkowego momentu si³ wzglêdem osi i œredniej szybkoœci k¹towej bry³y.
Moment pêdu bry³y i prawa dynamiki ruchu obrotowego
Rozwa¿my ruch obrotowy jednostajnie przyspieszony pewnej bry³y i obliczmy
przyrost
DE
k
jej energii kinetycznej w czasie
Dt, w którym wartoœæ prêdkoœci k¹to-
wej bry³y roœnie od wartoœci
w
1
do
w
2
:
DE
I
I
I
k
=
-
=
-
+
w
w
w
w w
w
2
2
1
2
2
1
2
1
2
2
2
(
) (
)
(20)
Poniewa¿ ruch jest jednostajnie przyspieszony, wiêc œrednia szybkoœæ k¹towa
w
w
w
œr
=
+
1
2
2
.
DE
I
k
œr
=
-
(
)
w
w w
2
1
.
(21)
Z drugiej strony, zmiana energii kinetycznej bry³y równa siê pracy wykonanej
przez wypadkowy moment si³:
D
D
E
M
t
k
œr
= w
,
(22)
sk¹d:
M t
I
I
D =
-
w
w
2
1
.
(23)
Widzimy, ¿e iloczyn wartoœci momentu si³y i czasu jego dzia³ania równa siê
zmianie wielkoœci fizycznej L
I
= w. Ta wielkoœæ charakteryzuje bry³ê w ruchu
obrotowym i nazywa siê wartoœci¹ momentu pêdu bry³y. Moment pêdu
r
L bry³y ma
taki sam kierunek i zwrot jak wektor prêdkoœci k¹towej:
r
r
L
I
= w .
(24)
Dziel¹c obie strony równoœci (31) przez
Dt otrzymujemy (w zapisie wekto-
rowym):
r
r
M
L
t
=
D
D
,
(25)
gdzie
D
r
L jest przyrostem wektora momentu pêdu.
Uzupe³nienie
Mechanika bry³y sztywnej
8
6
F
r
a
O
P
e
M
z
Rys. 8
Uzyskane prawo zawiera bardzo istotn¹ informacjê. Wynika z niego, ¿e wypad-
kowy moment si³ dzia³aj¹cych na bry³ê sztywn¹ jest równy szybkoœci zmian mo-
mentu pêdu tej bry³y. Jeœli wiêc wypadkowy moment si³ jest równy zeru, to moment
pêdu bry³y nie ulega zmianie. Wniosek ten nazywamy prawem zachowania mo-
mentu pêdu. Dla uk³adu obracaj¹cych siê cia³ zmiana momentu pêdu mo¿e oczy-
wiœcie nast¹piæ tylko w wyniku dzia³ania si³ (o niezerowych momentach wzglêdem
osi obrotu) pochodz¹cych spoza tego uk³adu.
Wzór (25) jest zupe³nie ogólny tzn. s³uszny bez zastrze¿enia o sta³oœci osi
obrotu, jednak jego powszechnie u¿ywane przekszta³cenie (nazywane II zasad¹
dynamiki ruchu obrotowego) – ju¿ nie:
M
I
t
=
D
D
w
,
M
I
= e .
(26)
Zapamiêtaj, ¿e powy¿szy zwi¹zek jest s³uszny tylko w przypadku, gdy oœ obrotu
pokrywa siê z osi¹ symetrii bry³y jednorodnej.
Mechanika bry³y sztywnej
Uzupe³nienie
9
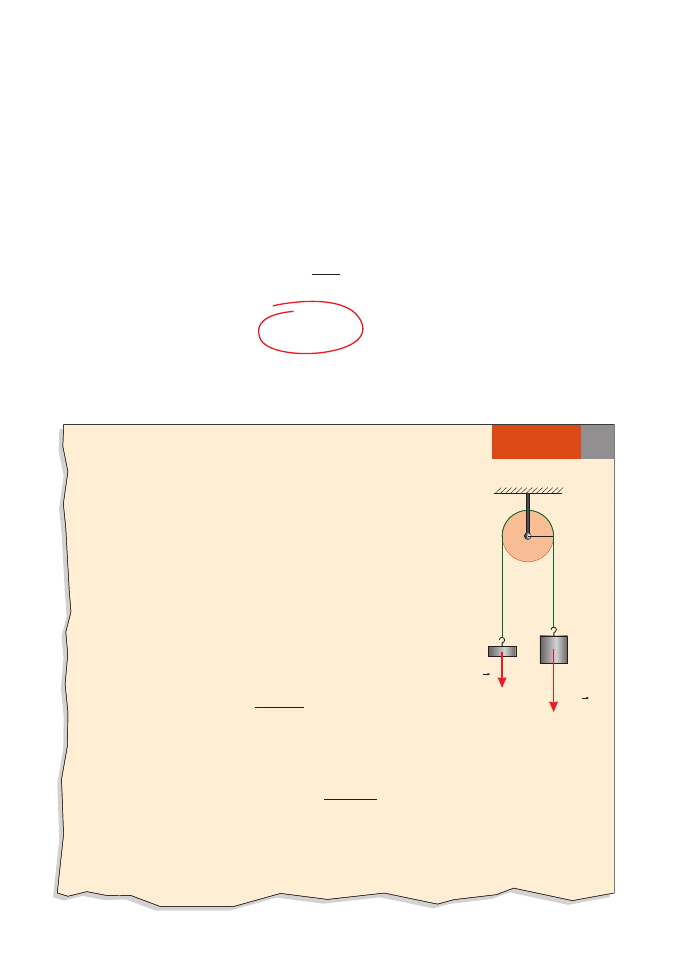
PRZYK£AD
1
Na kr¹¿ku o masie M i promieniu R (rys. 9)
zawieszono
na
nierozci¹gliwej,
cienkiej,
niewa¿kiej lince dwa obci¹¿niki o masach
m
1
i
m
2
(
)
m
m
2
1
>
i puszczono je. Wspó³czynnik tarcia
statycznego linki o kr¹¿ek jest tak du¿y, ¿e
linka nie œlizga siê po kr¹¿ku, lecz powoduje
jego obrót.
a) Obliczymy wartoœæ przyspieszenia uk³a-
du tych obci¹¿ników, nie uwzglêdniaj¹c bez-
w³adnoœci kr¹¿ka. Wypadkowa si³ zewnêtrznych
r
F
1
i
r
F
2
powoduje ruch postêpowy uk³adu cia³,
nadaj¹c mu przyspieszenie
r
r
a
F
m
m
wyp
=
+
1
2
.
|
|
(
)
r
F
m g
m g
m
m g
wyp
=
-
=
-
2
1
2
1
,
wiêc
a
m
m
m
m
g
=
-
+
2
1
2
1
.
b) Uwzglêdnimy teraz bezw³adnoœæ kr¹¿ka. Zastosujemy drug¹
zasadê dynamiki dla ruchu postêpowego obci¹¿ników i dla ruchu ob-
rotowego kr¹¿ka. Otrzymamy w ten sposób uk³ad trzech równañ.
m
1
m
2
m
1
g
m
2
g
M
R
Rys. 9
Uzupe³nienie
Mechanika bry³y sztywnej
10
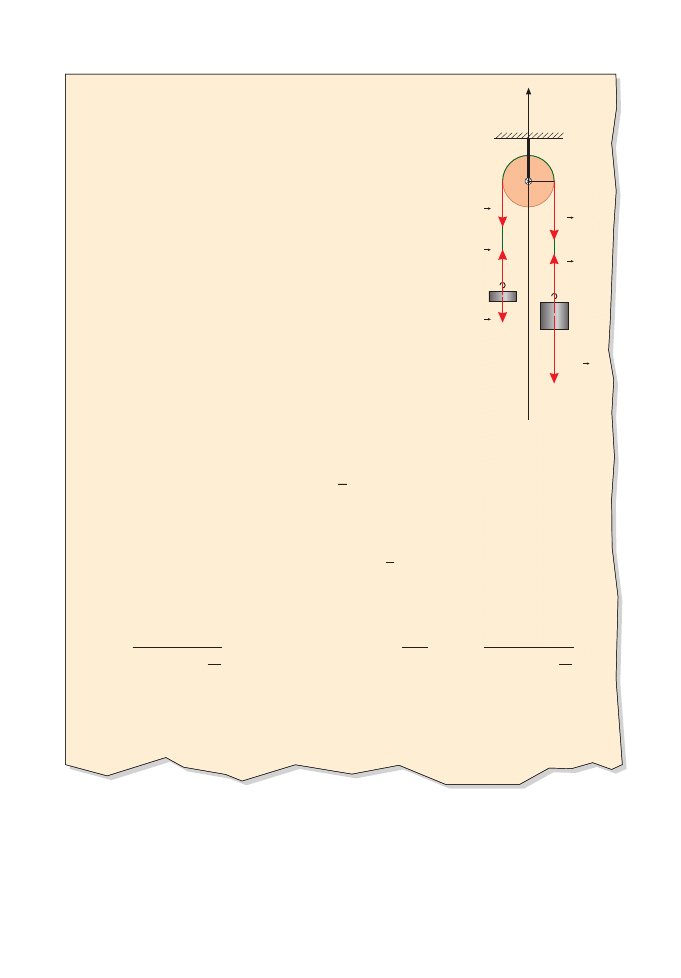
Zwróæ uwagê, ¿e kr¹¿ek obraca siê zgodnie
ze wskazówkami zegara ruchem obrotowym przy-
spieszonym na skutek tego, ¿e si³y napiêcia
linki po obu stronach maj¹ ró¿ne wartoœci,
zatem wypadkowy moment si³ dzia³aj¹cych na
kr¹¿ek
jest
ró¿ny
od
zera.
Wyznacz
zwroty
momentów tych si³ i sprawdŸ, ¿e moment si³y
r
N
2
jest zwrócony pod rysunek, a moment si³y
r
N
1
–
do nas.
Obieramy
zwi¹zany
z
laboratorium
uk³ad
wspó³rzêdnych xy o pocz¹tku w œrodku kr¹¿ka
i o osiach zwróconych tak, jak pokazuje ry-
sunek 10 (oœ y jest prostopad³a do p³aszczyz-
ny rysunku i zwrócona pod rysunek).
Oto równania ruchu:
dla obci¹¿nika o masie
m
1
:
¢ -
=
N
m g
m a
1
1
1
,
dla obci¹¿nika o masie
m
2
:
¢ -
= -
N
m g
m a
2
2
2
,
dla kr¹¿ka o masie M i promieniu R:
N R
N R
J
2
1
-
= e.
Jednak
¢ =
N
N
1
1
,
¢ =
N
N
2
2
i
e =
a
R
, bo a jest wartoœci¹ przyspie-
szenia stycznego punktu na obwodzie kr¹¿ka. Zatem
N
m g
m a
1
1
1
-
=
,
N
m g
m a
2
2
2
-
= -
,
(
)
N
N R
J
a
R
2
1
-
=
.
Obliczaj¹c z dwóch pierwszych równañ
N
1
i
N
2
i podstawiaj¹c te
wyra¿enia do trzeciego, otrzymujemy wartoœæ przyspieszenia uk³adu
a
m
m g
m
m
J
R
=
-
+
+
(
)
2
1
1
2
2
lub, wstawiaj¹c
J
M R
=
2
2
,
a
m
m g
m
m
M
=
-
+
+
(
)
2
1
1
2
2
.
Otrzymane wyra¿enie wskazuje, ¿e gdy
M
m
m
<<
+
1
2
wynik jest
taki sam, jak poprzednio.
N
1
N
1
N
2
=
=
N
2
N'
1
N'
1
N'
2
N'
2
M
y
R
x
m
1
g
m
1
m
2
m
2
g
Rys. 10
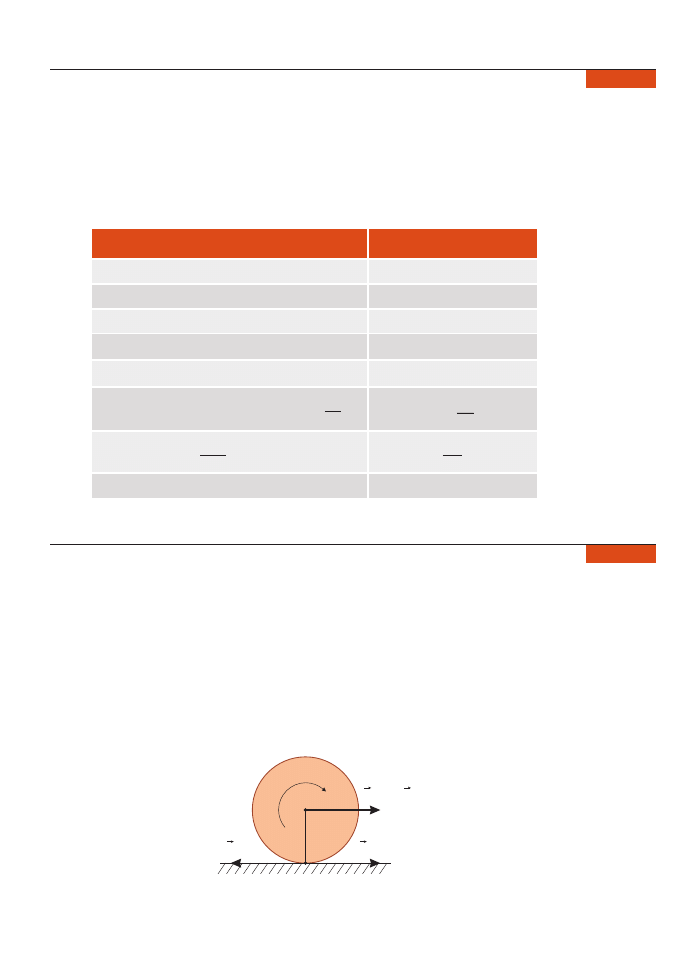
O analogiach miêdzy ruchem postêpowym i obrotowym
Mo¿na powiedzieæ, ¿e analogie miêdzy wielkoœciami i ich wzajemnymi zwi¹z-
kami w opisie ruchu postêpowego i obrotowego s¹ bardzo ³atwe do zauwa¿enia.
Poni¿ej podano w tabeli zestawienie wybranych analogonów. Zestawienie to mo¿e
byæ u¿yteczne dla zapamiêtania np. postaci praw. Jednak z wszelkimi wnioskami
czy ogólnieniami trzeba tu byæ nader ostro¿nym! Rozumowanie przez analogiê
mo¿e byæ zawodne!
Ruch postêpowy
Ruch obrotowy
droga s
droga k¹ta
a
prêdkoœæ liniowa
r
u
prêdkoœæ k¹towa
r
w
masa m
moment bezw³adnoœci I
pêd
r
p
moment pêdu
r
L
si³a
r
F
moment si³y
r
M
uogólniona postaæ II zasady dynamiki
r
r
F
p
t
=
D
D
r
r
M
L
t
=
D
D
energia kinetyczna
m
u
2
2
I
w
2
2
moc P
F
œr
= u
P
M
œr
= w
Z³o¿enie ruchu postêpowego i obrotowego – toczenie
Wspominaliœmy ju¿, ¿e toczenie siê kuli, walca albo obrêczy mo¿emy rozpatry-
waæ jako z³o¿enie ruchu postêpowego wzglêdem pod³o¿a i obrotowego wokó³ osi
symetrii. Bêdziemy rozwa¿aæ toczenie siê bez poœlizgu. W takim przypadku punkt
bry³y, stykaj¹cej siê w danej chwili z pod³o¿em ma w tej chwili prêdkoœæ wzglêdem
pod³o¿a równ¹ zeru. Co wynika z tego faktu? Ka¿dy punkt bry³y w ruchu z³o¿onym
ma prêdkoœæ równ¹ sumie dwóch prêdkoœci – ruchu postêpowego i obrotowego
(tylko punkty le¿¹ce na osi nie poruszaj¹ siê po okrêgu).
Skoro wypadkowa prêdkoœæ punktu A (rys. 11) jest równa zeru, oznacza to, ¿e
prêdkoœæ liniowa tego punktu (i wszystkich le¿¹cych w odleg³oœci R od osi obrotu)
Mechanika bry³y sztywnej
Uzupe³nienie
11
7
8
R
O
A
u
post
u
post
u
obr
u
=
Rys. 11
w ruchu obrotowym ma tak¹ sam¹ wartoœæ, jak prêdkoœæ w ruchu postêpowym
bry³y, czyli jak prêdkoœæ, z któr¹ przesuwa siê jej oœ:
u u
=
obr
,
ale
u
w
obr
R
=
,
zatem
u w
= R .
Taki jest zwi¹zek miêdzy szybkoœci¹
u przesuwania siê bry³y a szybkoœci¹
k¹tow¹ jej obrotu
w. (Zastanów siê, która wielkoœæ by³aby wiêksza: u, czy wR,
gdyby bry³a toczy³a siê z poœlizgiem).
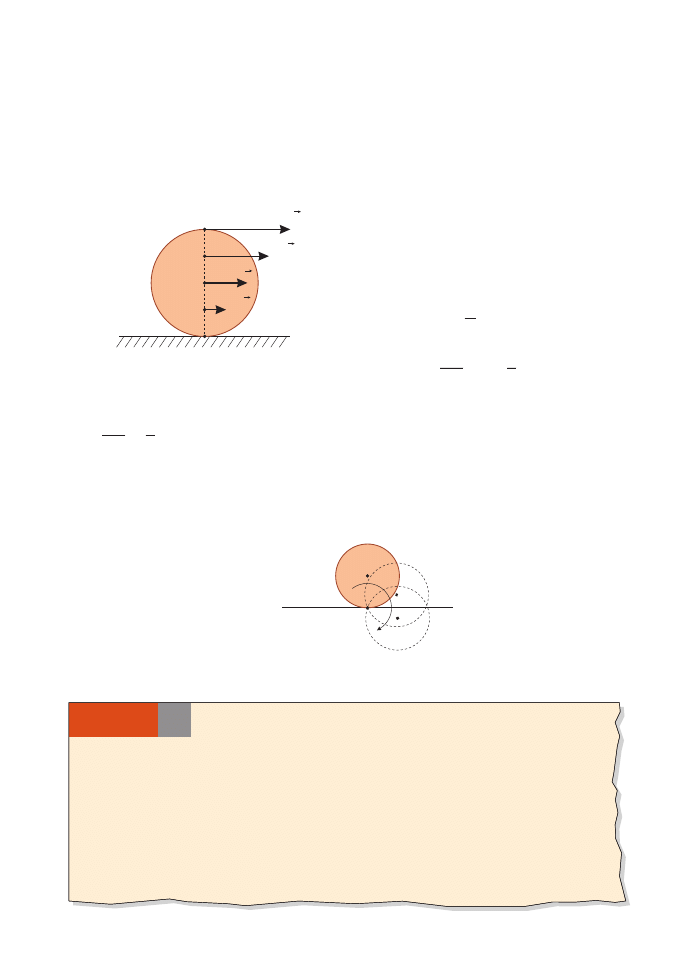
Jak¹ prêdkoœæ wypadkow¹ maj¹ inne punk-
ty bry³y, np. te, które le¿¹ na pionowej œrednicy,
zaznaczonej na rysunku 12? Na przyk³ad punkt
C ma prêdkoœæ wypadkow¹ z³o¿on¹ z dwóch
prêdkoœci o zgodnych zwrotach i wartoœciach
równych: w ruchu postêpowym
u i w ruchu
obrotowym
u
w
obr C
R
=
2
, zatem
u
u
w
u
u
u
C
R
= +
= + =
2
2
1 5
,
.
Zwróæ uwagê, ¿e prêdkoœæ
ru
obr B
jest zwrócona w lewo, ma wartoœæ równ¹
w
u
R
2
2
= , wiêc prêdkoœæ wypadkowa punktu B jest zwrócona w prawo i ma war-
toϾ 0 5
,
u. Wyjaœnij, dlaczego wypadkowa prêdkoœæ punktu D wynosi 2 ru.
Bry³a w danej chwili zachowuje siê tak, jakby wykonywa³a tylko obrót wzglê-
dem tzw. „chwilowej” osi obrotu A, równoleg³ej do osi O (rys. 13). Ruch tocz¹cej
siê bez poœlizgu bry³y jest równowa¿ny takiemu obrotowi.
Uzupe³nienie
Mechanika bry³y sztywnej
12
A
Rys. 13
O
A
0,5
1,5
2
B
C
D
u
u
u
u
Rys. 12
PRZYK£AD
2
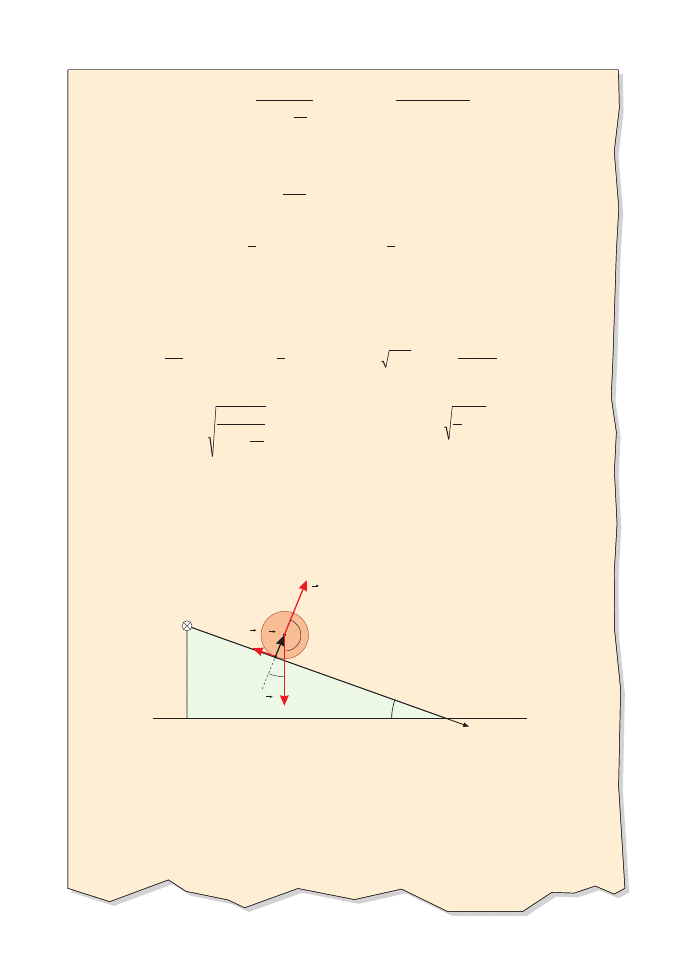
Z równi pochy³ej o wysokoœci h stacza siê bez poœlizgu walec
o masie m i promieniu poprzecznego przekroju R. Obliczmy wartoϾ
prêdkoœci ruchu postêpowego walca u podstawy równi (rys. 14)
Zadanie rozwi¹¿emy dwoma sposobami.
Sposób I
Potraktujmy ruch staczaj¹cego siê walca jako z³o¿enie dwóch
ruchów: obrotowego wzglêdem osi symetrii i postêpowego z prêd-
koœci¹ równ¹ prêdkoœci œrodka masy.
Mechanika bry³y sztywnej
Uzupe³nienie
13
Stosujemy drug¹ zasadê dynamiki dla obu ruchów i na jej pod-
stawie piszemy równania ruchu. Z równi¹ wi¹¿emy uk³ad xy (oœ y
zwrócona jest pod rysunek). przyœpieszenie k¹towe w tym uk³adzie
nadaje walcowi moment si³y tarcia, bo momenty pozosta³ych si³ (
mgr
i
r
F
s
) lub te¿
r
F
zsuw
, która je zastêpuje, s¹ równe zeru – linie
dzia³ania tych si³ przecinaj¹ oœ obrotu (rys. 15). Moment si³y
tarcia
ma
wartoϾ
TR, bo
r
r
T
R
^
i
jest
zwrócony
tak
jak
oœ
y
(sprawdŸ to !).
TR
J
=
0
e.
(27)
Ruch postêpowy walca odbywa siê wzd³u¿ osi x. Wypadkowa si³
dzia³aj¹cych na walec ma na tej osi wspó³rzêdne:
mg
T
sin
a - .
mg
T
ma
sin
a -
=
,
(28)
gdzie a jest wspó³rzêdn¹ przyœpieszenia ruchu postêpowego walca.
Za³o¿yliœmy, ¿e ruch odbywa siê bez poœlizgu, wiêc
e =
a
R
.
Z uk³adu równañ (27) i (28), o dwóch niewiadomych a i T:
TR
J
a
R
=
0
,
mg
T
ma
sin
a -
=
po przeprowadzeniu obliczeñ otrzymujemy wyniki:
R
h
a
u
Rys. 14
h
y
x
R
O
a
a
F
s
F
zsuw
T
mg
Rys. 15
Uzupe³nienie
Mechanika bry³y sztywnej
14
a
mg
m
J
R
=
+
sin
a
0
2
,
T
mgJ
mR
J
=
+
0
2
0
sin
a
.
(29)
Zauwa¿, ¿e wyniki te s¹ doœæ ogólne, stosuj¹ siê dla dowolnej
bry³y obrotowej, która mo¿e siê staczaæ. Po wstawieniu momentu
bezw³adnoœci walca
J
mR
0
2
2
=
æ
è
çç
ö
ø
÷÷, otrzymujemy
a
g
=
2
3
sin
a,
T
mg
=
1
3
sin
a.
Przyjrzyj siê tym wynikom i wyci¹gnij samodzielnie wnioski. S¹
one bardzo pouczaj¹ce, w szczególnoœci te, które dotycz¹ war-
toœci si³y tarcia.
Ruch postêpowy bry³y odbywa siê z przyœpieszeniem o wartoœci a,
zatem
s
at
=
2
2
, gdzie
t
a
=
u
, zatem
u = 2as; s
h
=
sin
a
, wiêc osta-
tecznie szybkoœæ koñcowa œrodka dowolnej bry³y obrotowej wyniesie
u =
+
2
0
2
mg h
m
J
R
,
a walca
u =
4
3
g h.
Sposób II
Potraktujmy teraz ruch staczaj¹cego siê bez poœlizgu walca
jako ruch obrotowy wokó³ chwilowej osi obrotu A (rys. 16). Teraz
do
obliczenia
wartoœci
przyœpieszenia
bry³y
wystarczy
jedno
równanie. Ró¿ny od zera moment si³y wzglêdem punktu A ma tylko
si³a
ciê¿koœci.
Moment
tej
si³y
nadaje
bryle
w
tym
ruchu
przyœpieszenie k¹towe
r
e.
Oœ y jak poprzednio jest prostopad³a do rysunku i zwrócona pod
rysunek. SprawdŸ, ¿e moment si³y
mgr jest zwrócony zgodnie z t¹
osi¹. Jego wartoœæ wynosi
mgR
mgR
mgR
sin
sin(
)
sin
j
a
a
=
°-
=
180
.
h
y
x
A
a
a
j
T
R
mg
F
s
Rys. 16
Mechanika bry³y sztywnej
Uzupe³nienie
15
Druga zasada dynamiki przyjmuje wiêc postaæ:
mgR
J
sin
a
e
=
,
gdzie
e =
a
R
, bo ruch odbywa siê bez poœlizgu. W tym przypadku mo-
ment bezw³adnoœci bry³y J musimy obliczyæ z twierdzenia Steinera:
J
J
mR
=
+
0
2
.
mgR
J
mR
a
R
sin
(
)
a =
+
0
2
.
Obliczona z tego wzoru wartoœæ przyœpieszenia bry³y wynosi:
a
mg
m
J
R
=
+
sin
a
0
2
,
(30)
i jest oczywiœcie taka sama, jak w sposobie I. Szybkoœæ koñcow¹
obliczamy tak, jak poprzednio.
Traktuj¹c ruch bry³y jako „czysty” ruch obrotowy, nie obliczy-
my wartoœci si³y tarcia, si³a ta bowiem nie wystêpuje w równaniu
ruchu – jest zaczepiona na osi obrotu.
Do wzoru (30) wstaw odpowiednie momenty bezw³adnoœci dla kuli
i obrêczy i oblicz wartoœæ przyœpieszenia, z jakim staczaj¹ siê
te bry³y z równi.
Sposób III
SzybkoϾ
koñcow¹
walca
mo¿emy
tak¿e
obliczyæ,
korzystaj¹c
z zasady zachowania energii mechanicznej.
Walec
rozpoczynaj¹cy
ruch
na
szczycie
równi
ma
(wzglêdem
podstawy równi) energiê potencjaln¹ ciê¿koœci
E
mg h
p
=
. Podczas
ruchu nastêpuje przemiana tej energii w energiê kinetyczn¹ ruchu
postêpowego i obrotowego:
E
E
E
p
k postêpowego
k obrotowego
=
+
,
,
,
mg h
m
J
=
+
u
w
2
0
2
2
2
.
(
u – szybkoœæ ruchu postêpowego, a w – szybkoœæ ruchu obrotowego
u podstawy równi)
Poniewa¿ w ruchu bez poœlizgu w ka¿dej chwili
u
w
= R, to:
mg h
m
J
R
m
J
R
=
+
=
+
æ
è
ç
ö
ø
÷
u
u
u
2
0
2
2
2
0
2
2
2
2
,
sk¹d:
u =
+
2
0
2
mg h
m
J
R
.
Po wstawieniu
J
mR
0
2
1
2
=
otrzymamy:
u =
4
3
g h.
1. Wyjaœnij, dlaczego jajko ugotowane na twardo mo¿na odró¿niæ od surowego, wprawiaj¹c je w ruch
obrotowy na stole.
2. Oblicz moment bezw³adnoœci kwadratowej ramki o boku a, wykonanej z cienkiego drutu o masie m,
obracaj¹cej siê:
a) wokó³ osi przechodz¹cej przez œrodki przeciwleg³ych boków,
b) wokó³ jednego z boków.
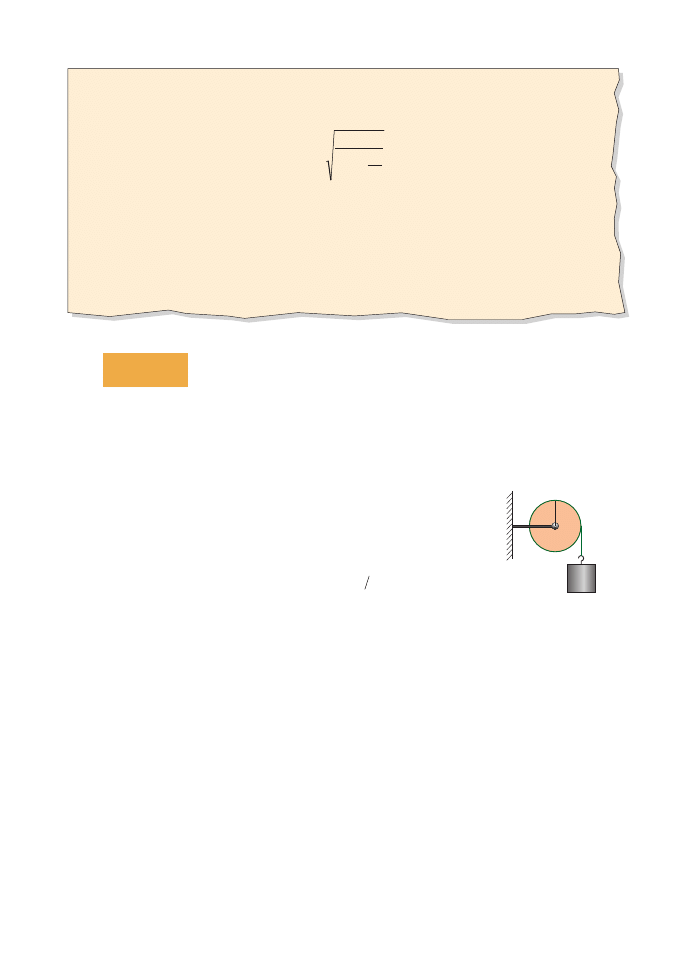
3. Na jednorodny kr¹¿ek o masie M
,
= 0 5 kg i promieniu R = 0 05
,
m
nawiniêto cienk¹, nierozci¹gliw¹ i niewa¿k¹ linkê, która nie œlizga siê
po kr¹¿ku (rys. 17). Kr¹¿ek mo¿e obracaæ siê bez oporów wokó³
osi przechodz¹cej przez jego œrodek prostopadle do powierzchni
(rys.
obok).
Na
koñcu
linki zawieszono
obci¹¿nik
o
masie
m
= 0 25
,
kg i puszczono. Przyjmuj¹c g
» 10 m s
2
, oblicz:
a) wartoœæ si³y napinaj¹cej linkê,
b) wartoœæ przyœpieszenia k¹towego kr¹¿ka,
c) wartoœæ sk³adowej stycznej przyœpieszenia liniowego punktów na
obwodzie kr¹¿ka,
d) szybkoœæ k¹tow¹ kr¹¿ka i szybkoœæ liniow¹ punktów na jego obwodzie uzyskan¹ po up³ywie
czasu t
s
= 2 od rozpoczêcia ruchu.
4. Oblicz stosunek energii kinetycznej ruchu obrotowego do:
a) ca³kowitej energii kinetycznej,
b) energii kinetycznej ruchu postêpowego,
dla walca, kuli i cienkoœciennej obrêczy, tocz¹cych siê z prêdkoœci¹
r
v bez poœlizgu po poziomej
powierzchni. Czy wyniki zmieni¹ siê, gdy ruch bêdzie odbywa³ siê wzd³u¿ równi pochy³ej? Uzasadnij
odpowiedŸ.
Uzupe³nienie
Mechanika bry³y sztywnej
16
Zwróæ uwagê, ¿e przeprowadzone rozumowania i uzyskany wynik
w postaci:
u =
+
2
0
2
mg h
m
J
R
bêd¹ takie same dla ka¿dej bry³y obrotowej o promieniu R. Wsta-
wiaj¹c do tego wzoru odpowiednie momenty bezw³adnoœci
J
0
, otrzy-
mamy szybkoœci koñcowe kuli walca i obrêczy.
Znaj¹c szybkoœæ koñcow¹ i k¹t nachylenia równi, mo¿na obliczyæ
wartoœci
przyœpieszeñ,
z
którymi
staczaj¹
siê
te
bry³y
bez
poœlizgu.
ZADANIA
m
M
R
Rys. 17
Wyszukiwarka
Podobne podstrony:
1 Bryła Sztywna Quizid 8461 ppt
Fizyka Uzupełniająca Bryła sztywna
6 bryla sztywna, AGH, Fizyka
7 bryla sztywna, MiBM, Nauczka, 2 semstr, sesja, Test z fizyki (jacenty86), FIZYKA ZERÓWKA, 7 bry a
bryła sztywna pp
Zadania bryla sztywna, IŚ, Semestr 1, Fizyka, Wykłady
6 bryla sztywna
IMIR bryla sztywna wykład
BRYŁA SZTYWNA
Dynamika bryla sztywna
5 bryla sztywna [tryb zgodnosci Nieznany
BRYŁA SZTYWNA, Politechnika Gdańska, Budownictwo, Semestr I, Fizyka I, Ćwiczenia
bryła sztywna klucz
(Fizyka ćwiczenia Bryła sztywna [tryb zgodności])
F11 bryla sztywna id 167352 Nieznany
więcej podobnych podstron