Roboty Przemysłowe
KRIM, AGH w Krakowie
1
Katedra Robotyki i Mechatroniki
Akademia Górniczo-Hutnicza w Krakowie
Wojciech Lisowski
9
Struktury manipulatora
o otwartym łańcuchu kinematycznym ramienia
Roboty przemysłowe
Roboty Przemysłowe
KRIM, AGH w Krakowie
2
Problemy:
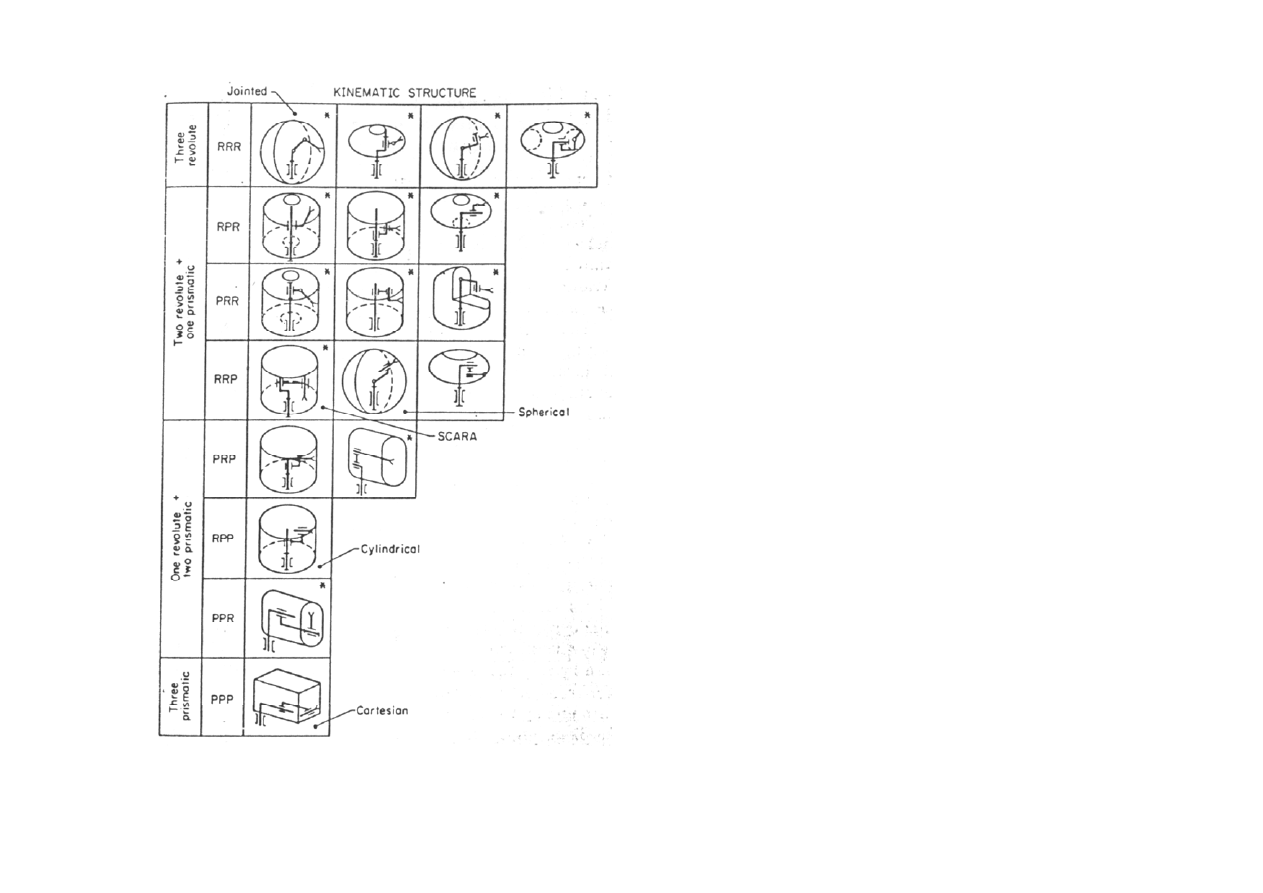
klasyfikacja podstawowych struktur ramienia
manipulatorów
manipulatory redundantne
własności ramienia manipulatora o strukturze:
antropomorficznej, kartezjańskiej i SCARA
Roboty Przemysłowe
KRIM, AGH w Krakowie
3
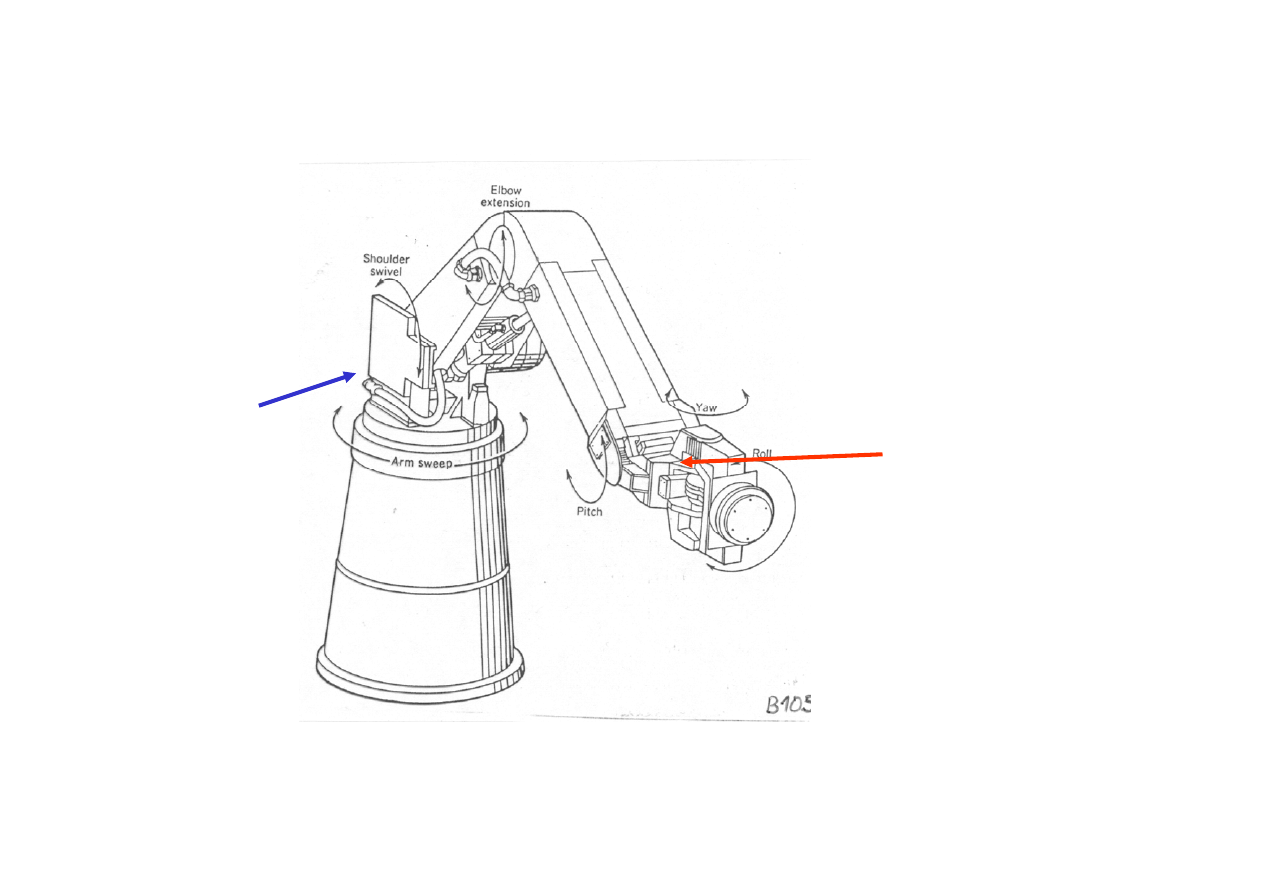
Manipulator robota przemysłowego
(robot manipulacyjny)
Ramię
Kiść
Roboty Przemysłowe
KRIM, AGH w Krakowie
4
Struktury podstawowe
Przedstawiają wyidealizowaną
przestrzeń roboczą (PR).
Rzeczywista PR jest ograniczona
przez:
-
ograniczone zakresy ruchów
- możliwe kolizje członów
- celowo usunięte z PR pozycje
osobliwe
Struktury pochodne powstają przez:
-
zmianę proporcji długości członów
- przesunięcia wzajemne osi ruchu
Roboty Przemysłowe
KRIM, AGH w Krakowie
5
MANIPULATORY NADMIAROWE
MANIPULATORY NADMIAROWE
-
-
REDUNDANTNE
REDUNDANTNE:
DOM>DOF=6 dla manipulatorów przestrzennych
Charakterystyka:
+
zwiększenie uniwersalności manipulatora (DOM)
+
ułatwienie omijania przeszkód
-
występują
niejednoznaczno
niejednoznaczno
ś
ś
ci geometryczne
ci geometryczne utrudniające
programowanie pracy i sterowanie ruchem manipulatora
-
duża liczba złączy obniża sztywność manipulatora, wprowadza luzy
pogarszaj
pogarszaj
ą
ą
c charakterystyki dok
c charakterystyki dok
ł
ł
adno
adno
ś
ś
ciowe
ciowe
Stosowane ze
skoordynowanymi nap
skoordynowanymi nap
ę
ę
dami
dami, zwiększenie liczby
członów pozwala zwiększyć zakresy ruchów efektora i omijać
przeszkody lub pracować w przestrzeniach ograniczonych: za
przegrodą, w przewodach (
manipulatory elastyczne
manipulatory elastyczne)
Roboty Przemysłowe
KRIM, AGH w Krakowie
6
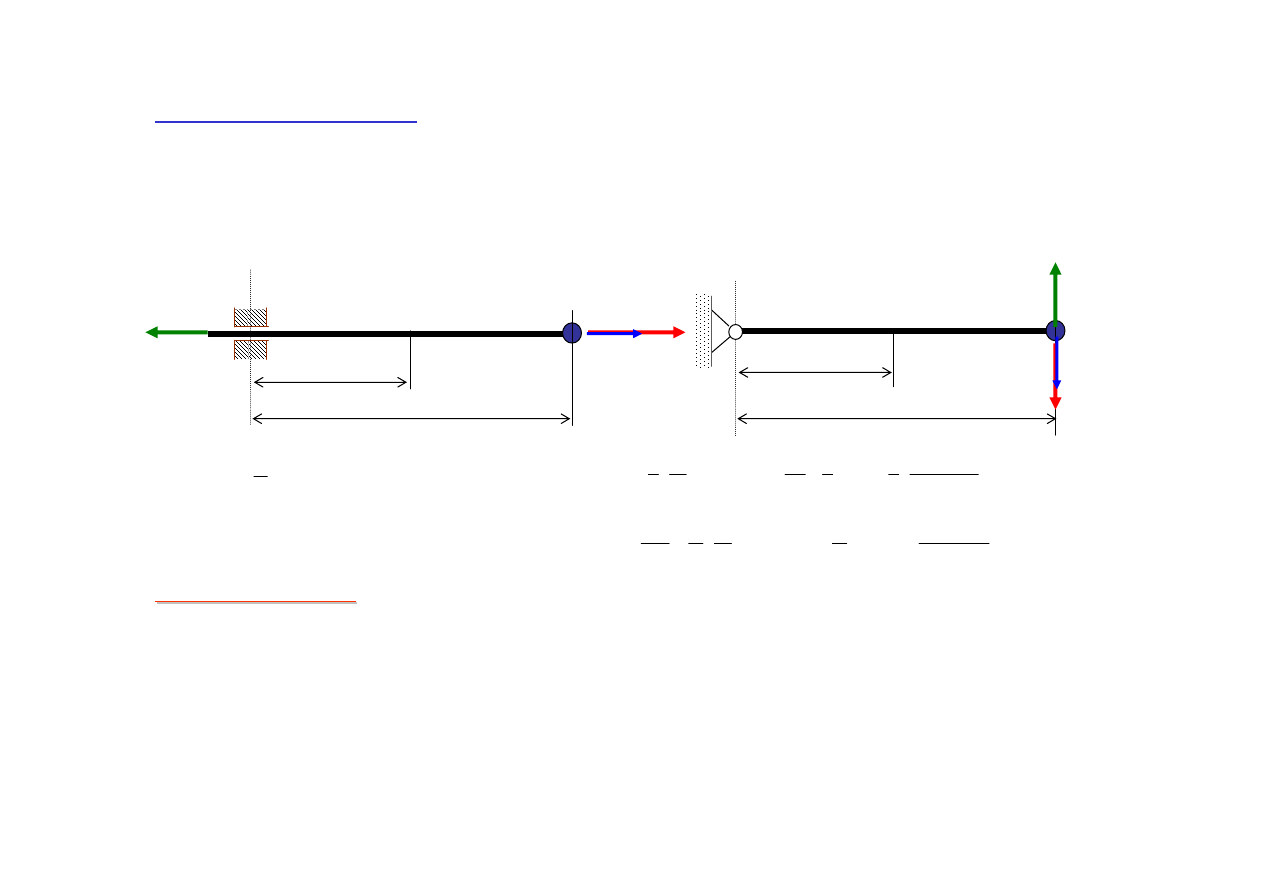
STRATEGIA ruchu
Do zmiany pozycji efektora należy wykorzystywać ruchy najbliższych
mu członów. Mają one zwykle ograniczone zakresy ruchów).
Ruch POSTĘPOWY
m
1
m
2
l
1
l
2
v
a
B
(
)
(
)
a
m
m
B
v
m
m
E
k
2
1
2
2
1
2
1
+
=
+
=
m
1
m
2
l
1
l
2
v
a
B
Ruch OBROTOWY
2
2
1
2
2
2
1
2
2
2
2
2
2
2
2
1
1
2
2
1
12
12
2
1
2
1
12
1
2
1
v
m
m
l
l
l
v
m
l
v
l
m
l
m
E
k
+
+
=
+
+
=
a
m
m
l
l
l
a
m
l
a
l
m
l
m
l
l
M
B
B
+
+
=
+
+
=
=
2
1
2
2
2
1
2
2
2
2
2
1
1
2
2
1
2
2
12
12
12
1
1
Ruch obrotowy
Ruch obrotowy:
-
z jednakowym przyspieszeniem i prędkością wymaga nadania
mniejszej energii kinetycznej
-
człon stawia mniejszy opór bezwładny w czasie przyspieszania
i hamowania
Roboty Przemysłowe
KRIM, AGH w Krakowie
7
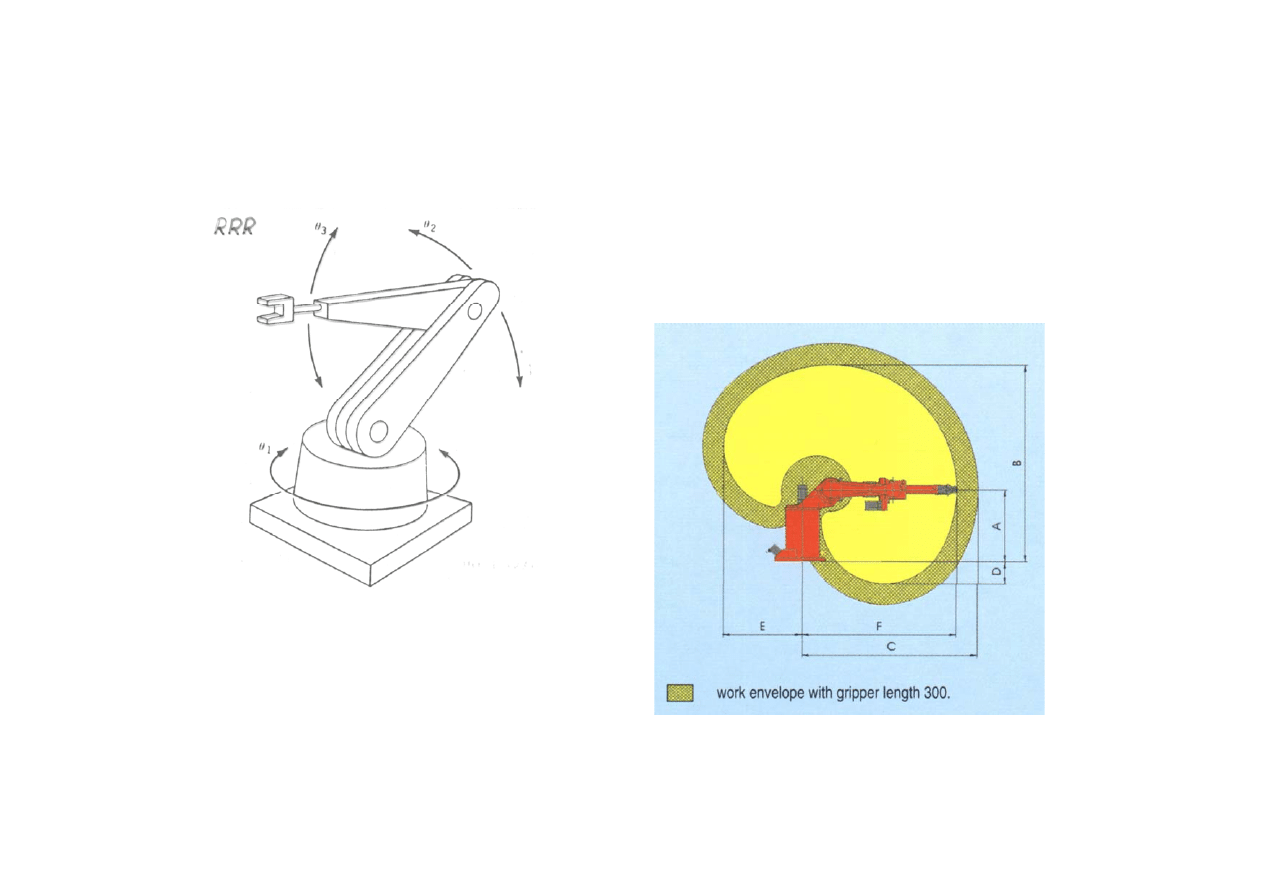
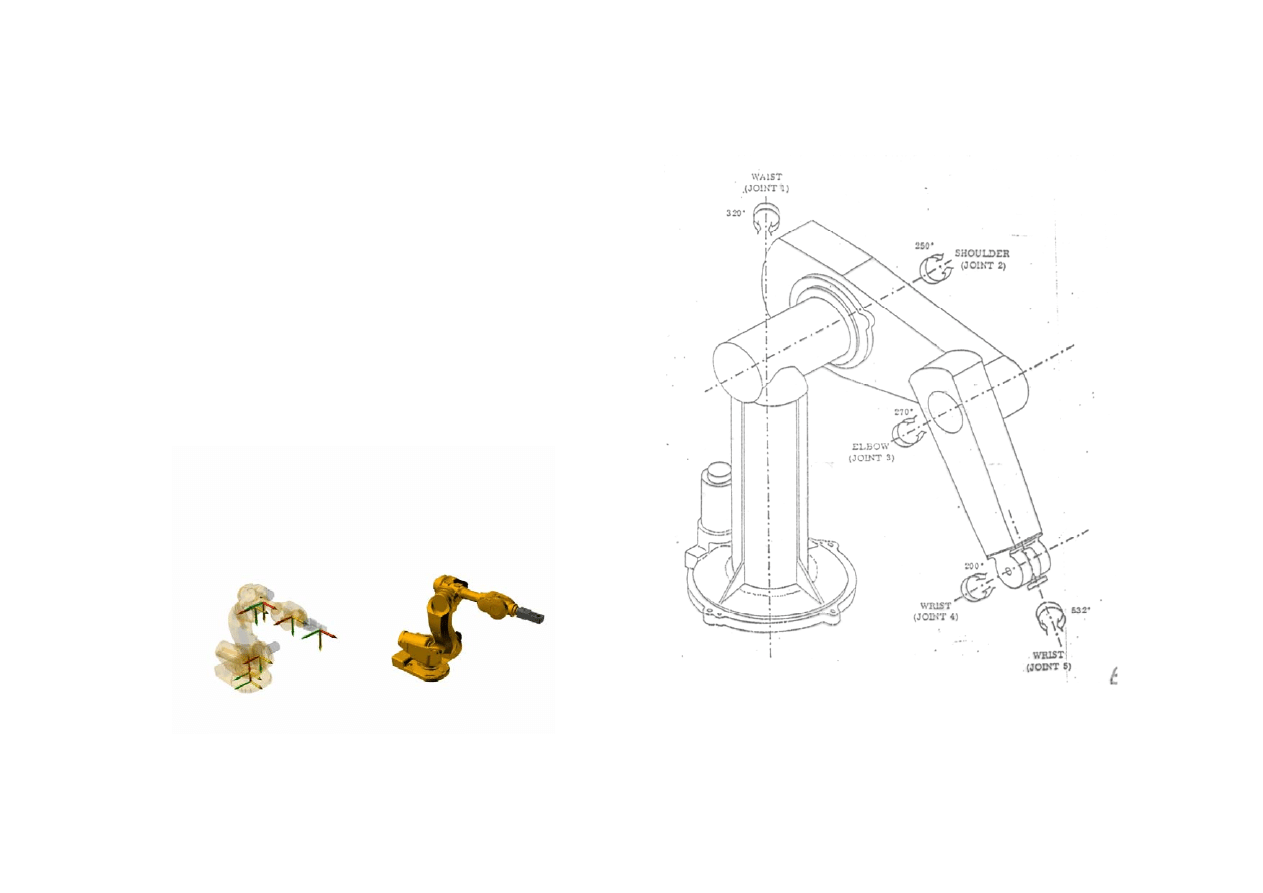
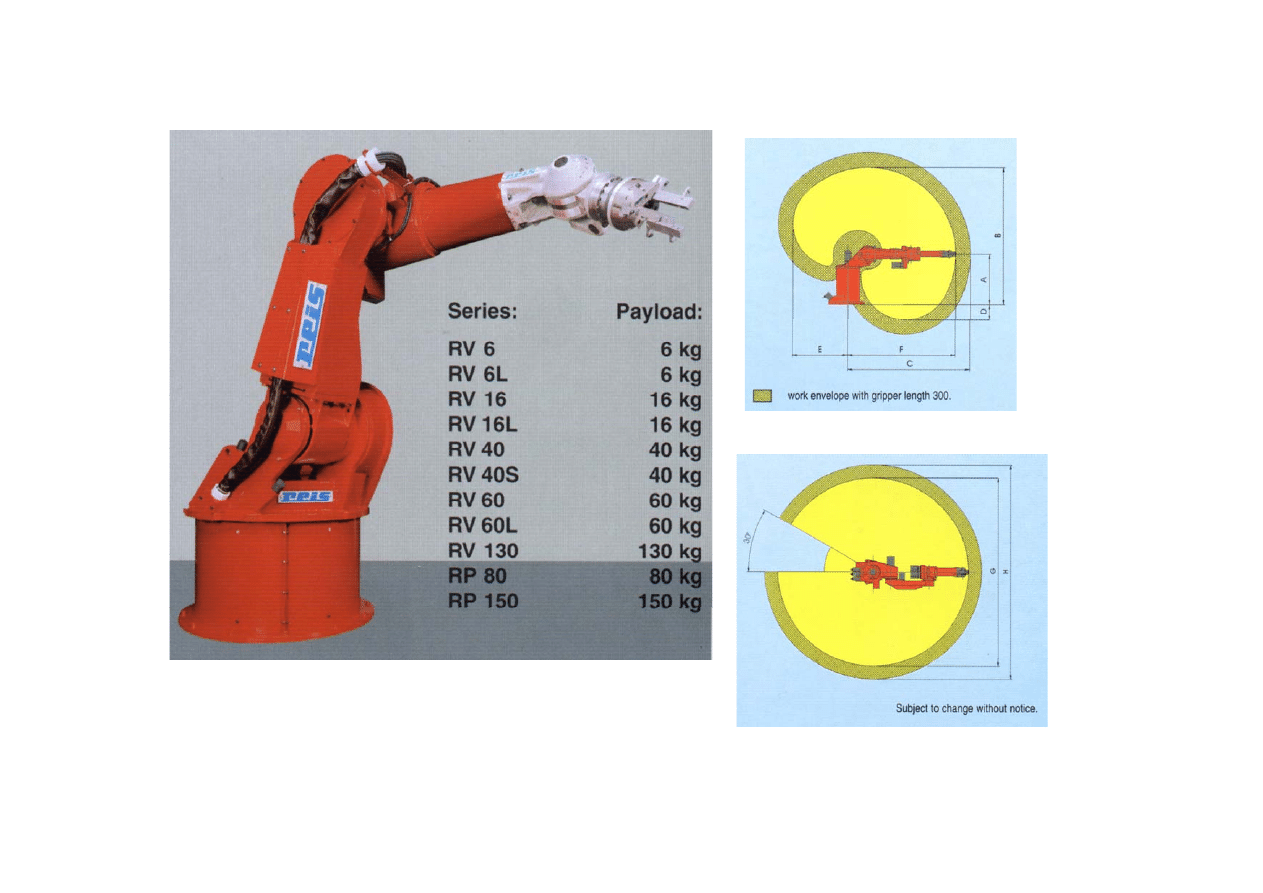
ANTROPOMORFICZNE RAMIĘ MANIPULATORA RRR
Struktura najczęściej stosowana
Napędy: elektryczne
Zastosowanie: uniwersalne
2005 wg IFR 30% instalacji
Reis RV
Roboty Przemysłowe
KRIM, AGH w Krakowie
8
Puma 560
Charakterystyka:
+ duża przestrzeń robocza
+ łatwe nadawanie orientacji
+ duża niezawodność
+ łatwa konserwacja
- mała sztywność
- zła powtarzalność pozycjonowania
- złożony model kinematyczny
i dynamiczny
Roboty Przemysłowe
KRIM, AGH w Krakowie
9
Reis RV
Roboty Przemysłowe
KRIM, AGH w Krakowie
10
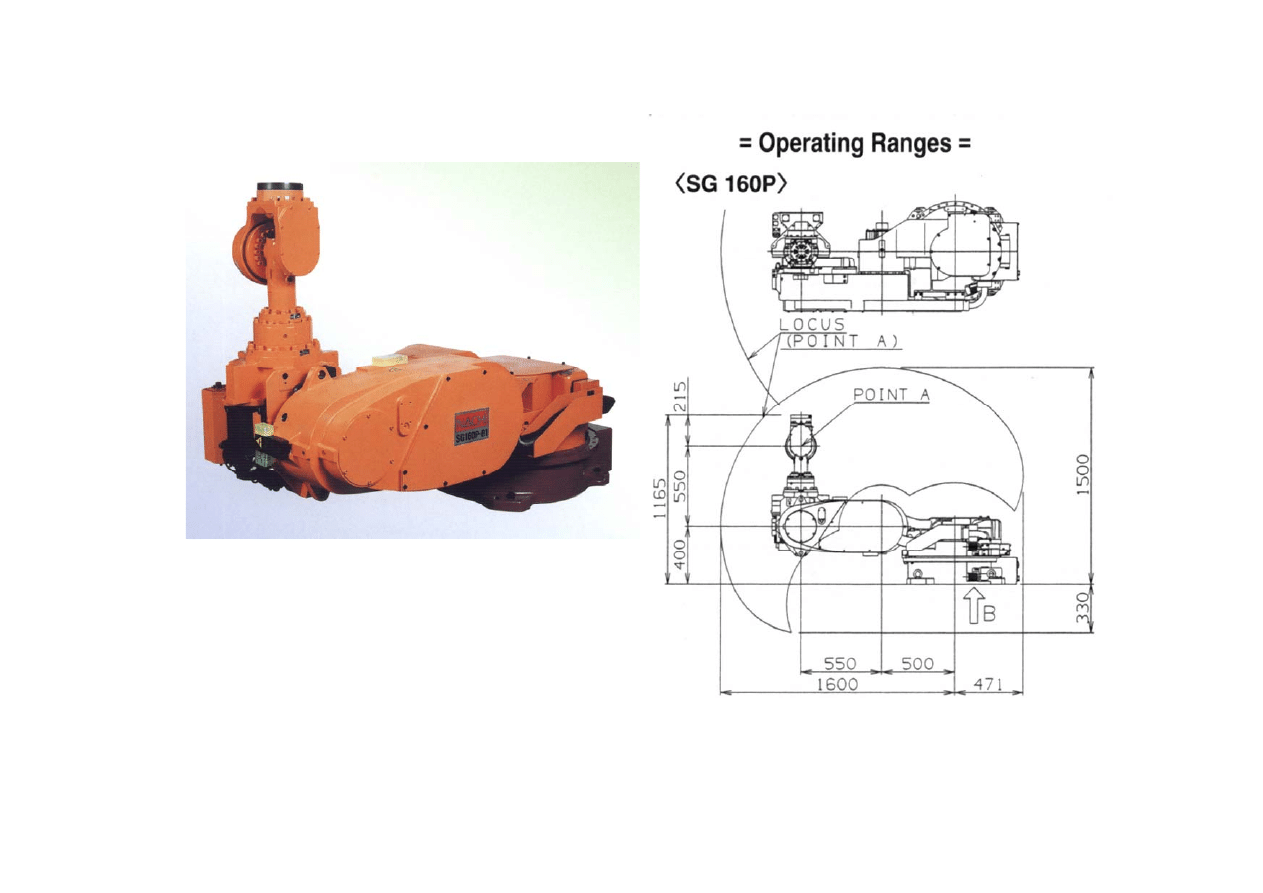
Nachi SG 160
Roboty Przemysłowe
KRIM, AGH w Krakowie
11
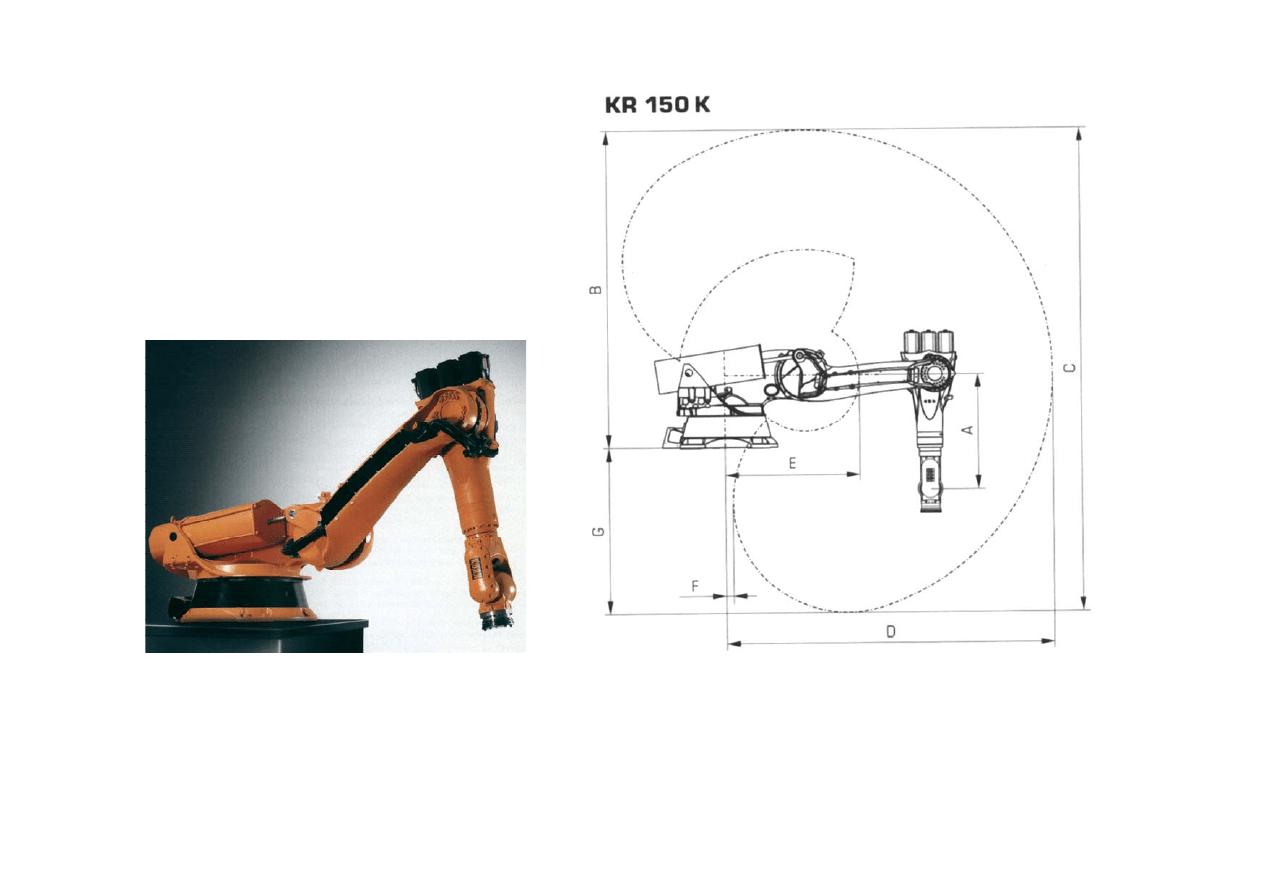
Kuka KR
Roboty Przemysłowe
KRIM, AGH w Krakowie
12
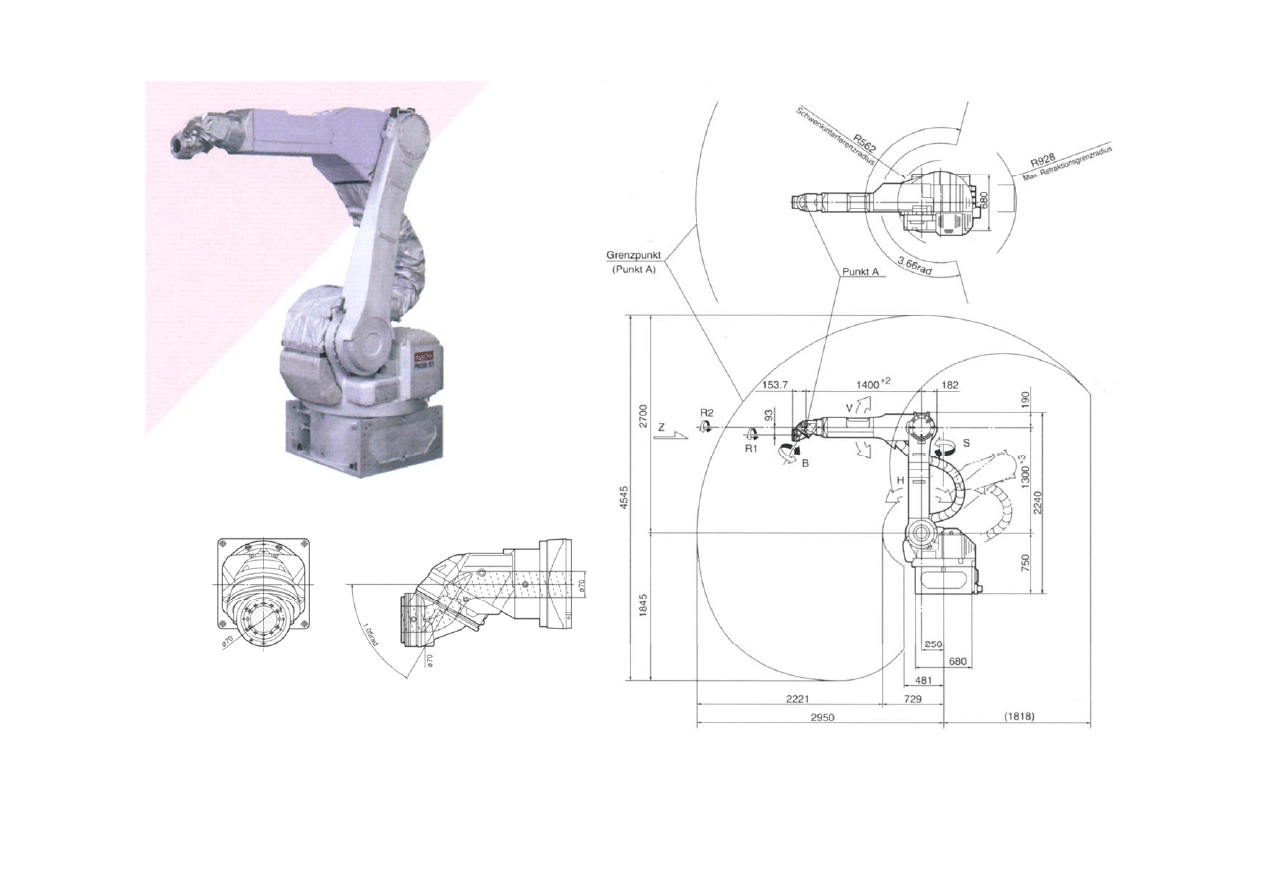
Nachi PW20
Roboty Przemysłowe
KRIM, AGH w Krakowie
13
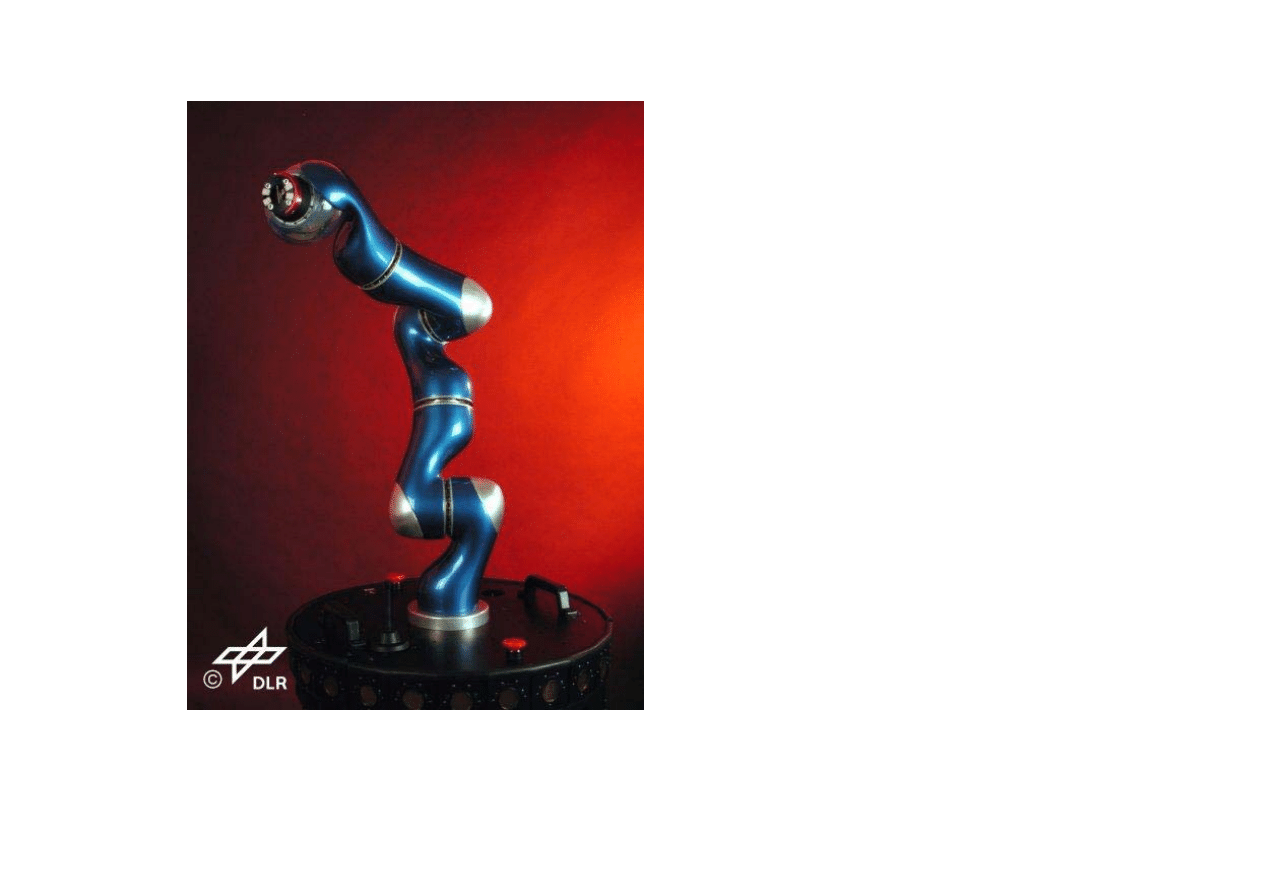
DLR Light Weight Robot
(DLR, Niemcy)
Struktura 7 R
Na przemian złącza typu R i typu B
Roboty Przemysłowe
KRIM, AGH w Krakowie
14
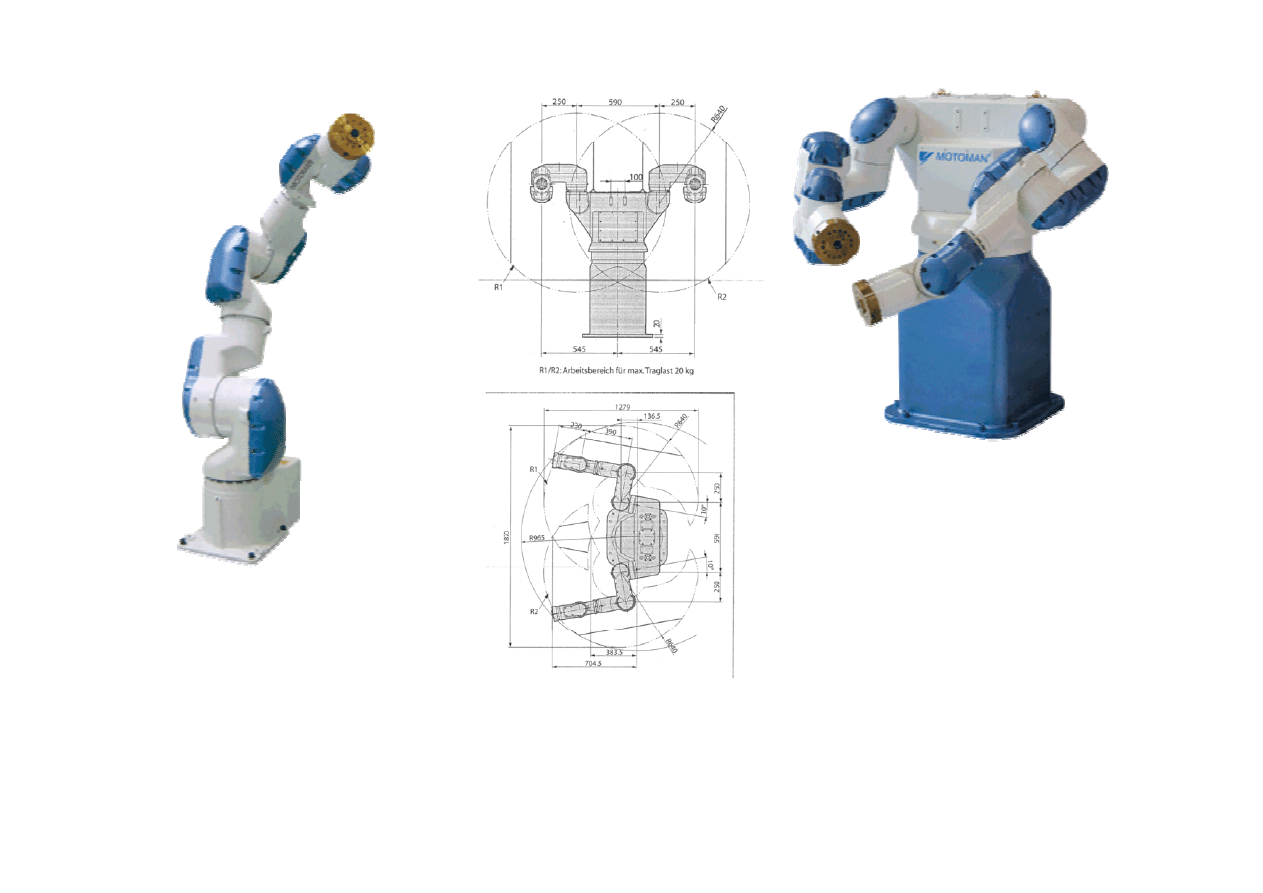
Motoman
IA20 7 DOM
DA20 2 × 6 DOM
Roboty Przemysłowe
KRIM, AGH w Krakowie
15
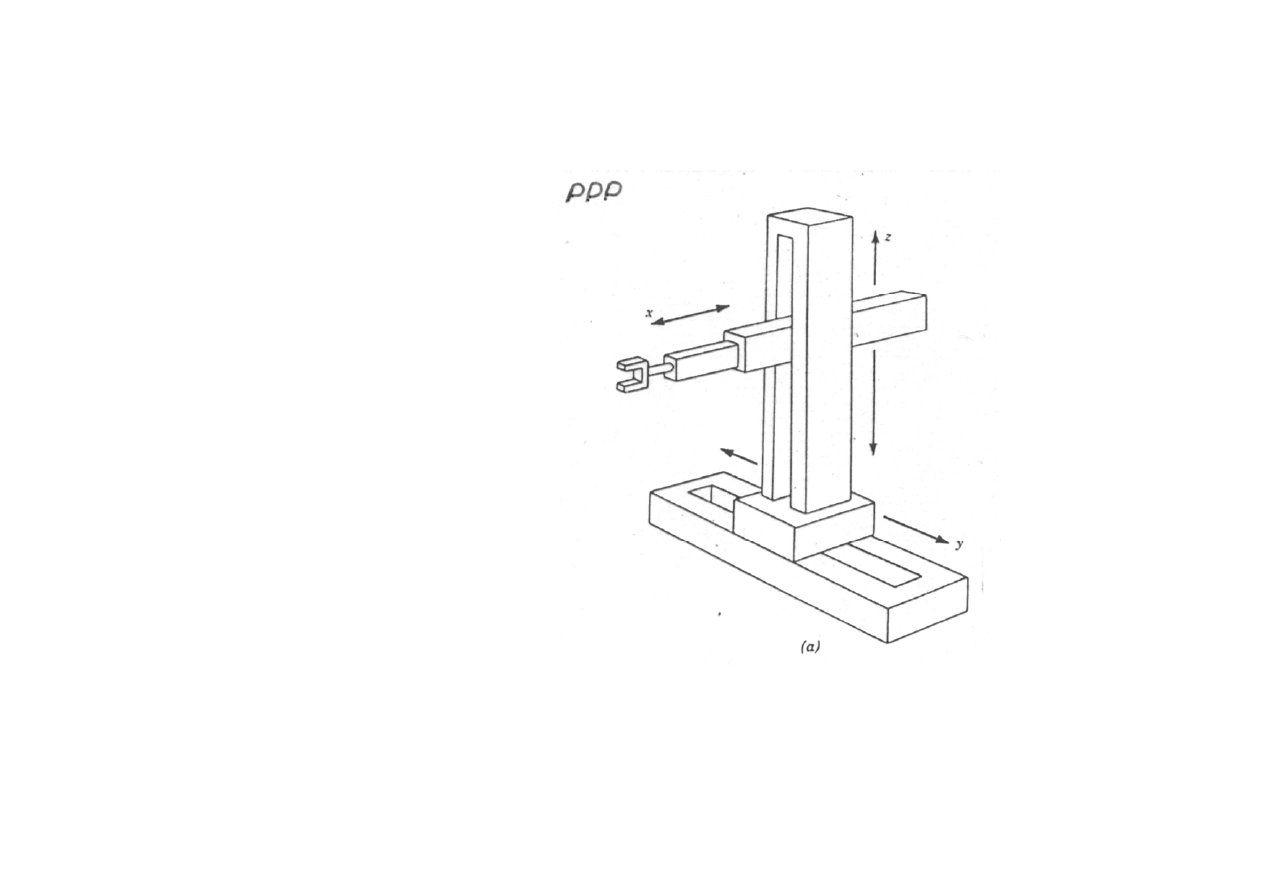
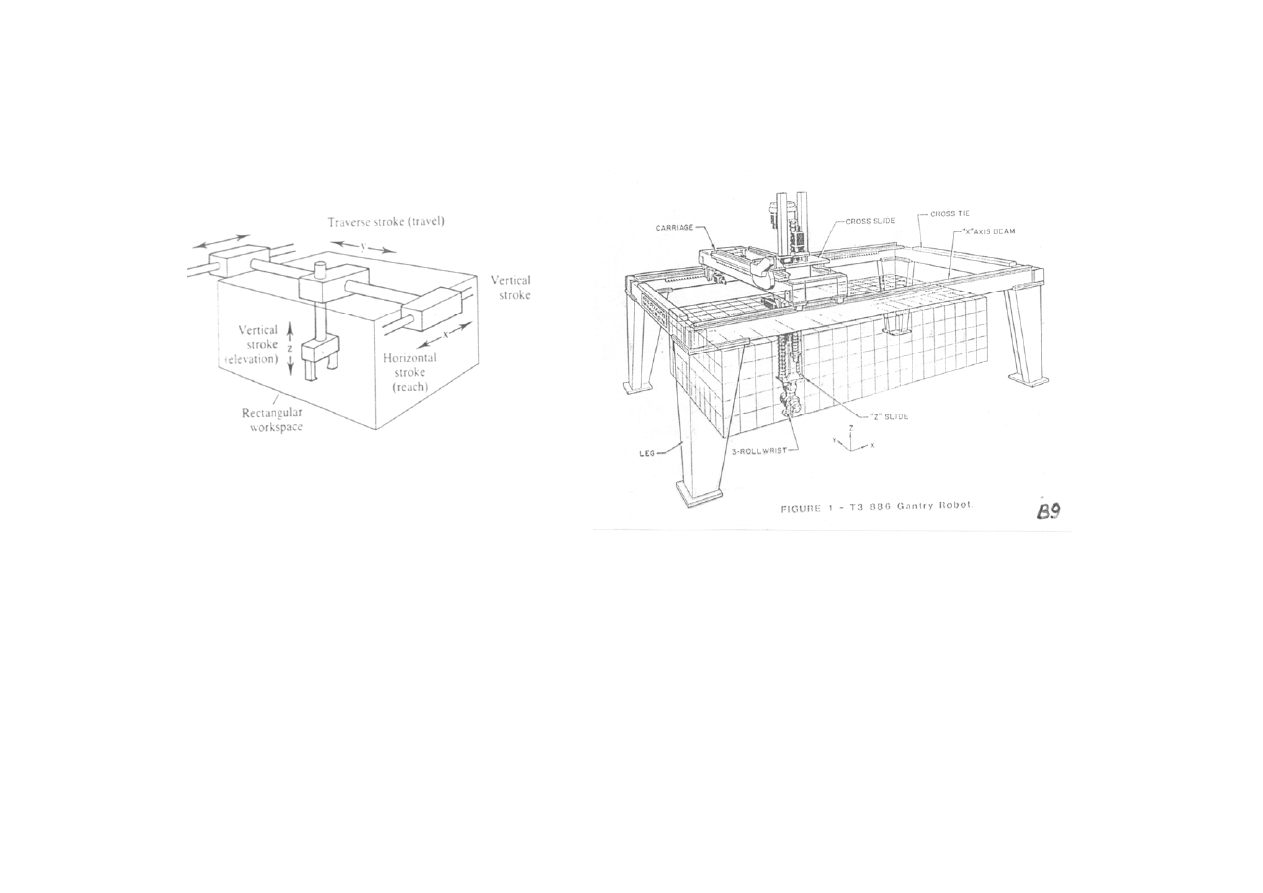
KARTEZJAŃSKIE RAMIĘ MANIPULATORA PPP
Napędy:
- pneumatyczne
- hydrauliczne
- elektryczne
Materiały:
- stal
- stopy aluminium
- tworzywa sztuczne
Zastosowanie:
- manipulacja
- montaż
2005 wg IFR 20% instalacji

Roboty Przemysłowe
KRIM, AGH w Krakowie
16
Charakterystyka:
+ prosta konstrukcja (napędy pneumatyczne)
+ łatwa modularyzacja
+ łatwa integracja z istniejącym stanowiskiem wytwórczym
+ duże zasięgi ruchów i udźwigi
+ duża sztywność ramienia
+ duża powtarzalność pozycjonowania
+ prosty model kinematyczny i dynamiczny
+ brak zmiany orientacji przy nadawaniu położenia
+ łatwość uzyskiwania ruchów prostoliniowych
- duży ciężar ramienia
- kosztowna konserwacja
- ograniczenie dostępu do przestrzeni roboczej
- zabezpieczenie prowadnic (zanieczyszczenia)
- odkształcenia ograniczają pewność ruchową prowadnic
- duże opory ruchu
Roboty Przemysłowe
KRIM, AGH w Krakowie
17
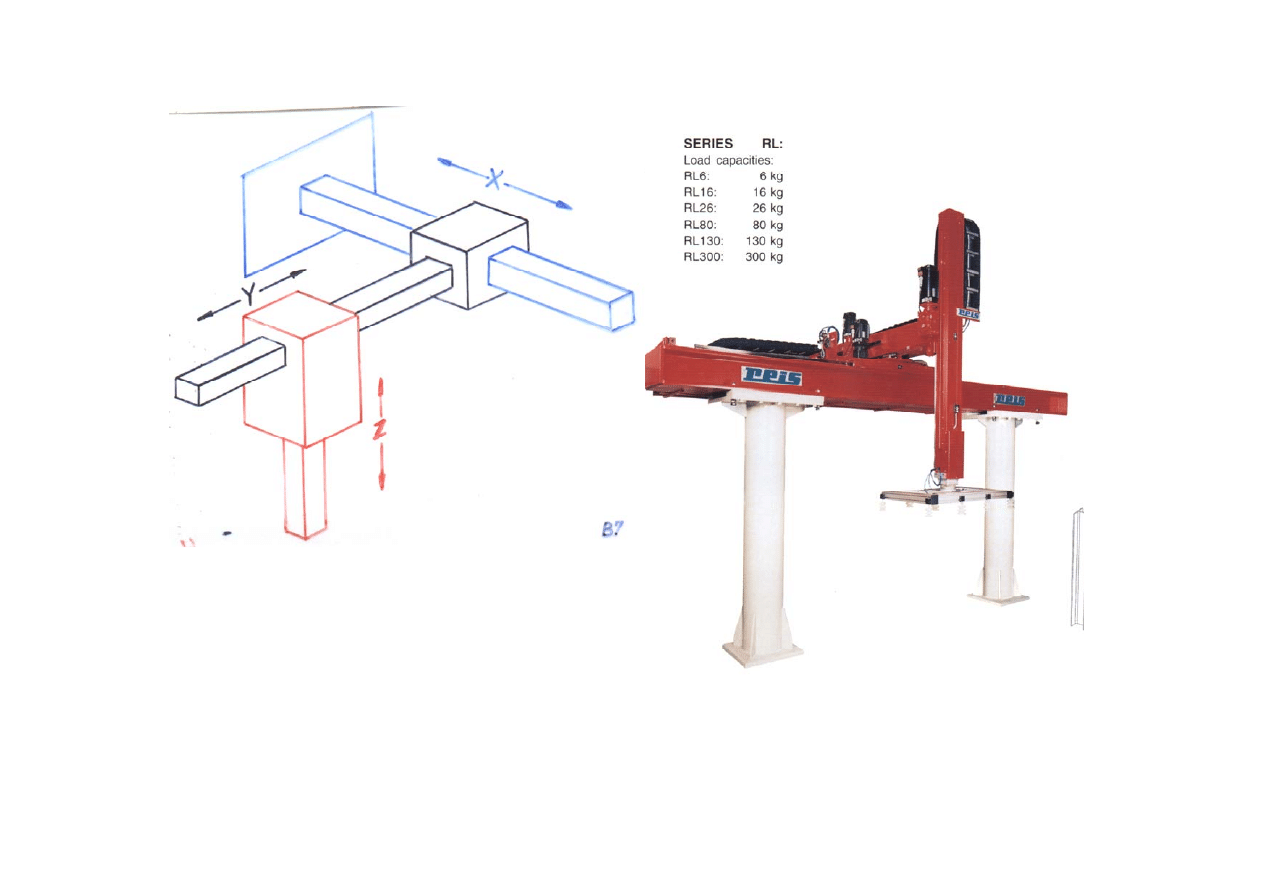
Odmiana struktury PPP
Reis RL
Roboty Przemysłowe
KRIM, AGH w Krakowie
18
MANIPULATOR PORTALOWY PPP
Zakresy ruchów:
X
×Y 100 ×40 m, Z 5 m
Prędkości ruchów:
5 m/s
Przyspieszenia: 30
m/s
2
Udźwig:
2000 N

Roboty Przemysłowe
KRIM, AGH w Krakowie
19
Charakterystyka:
+ duży udźwig nominalny
+ duża przestrzeń robocza
+ manipulator nie zajmuje podstawy przestrzeni roboczej
- portal utrudnia dostęp do przestrzeni roboczej
Zastosowania:
- obsługa obrabiarek CNC
- manipulacja ciężkimi elementami
- montaż ciężkich elementów
Roboty Przemysłowe
KRIM, AGH w Krakowie
20
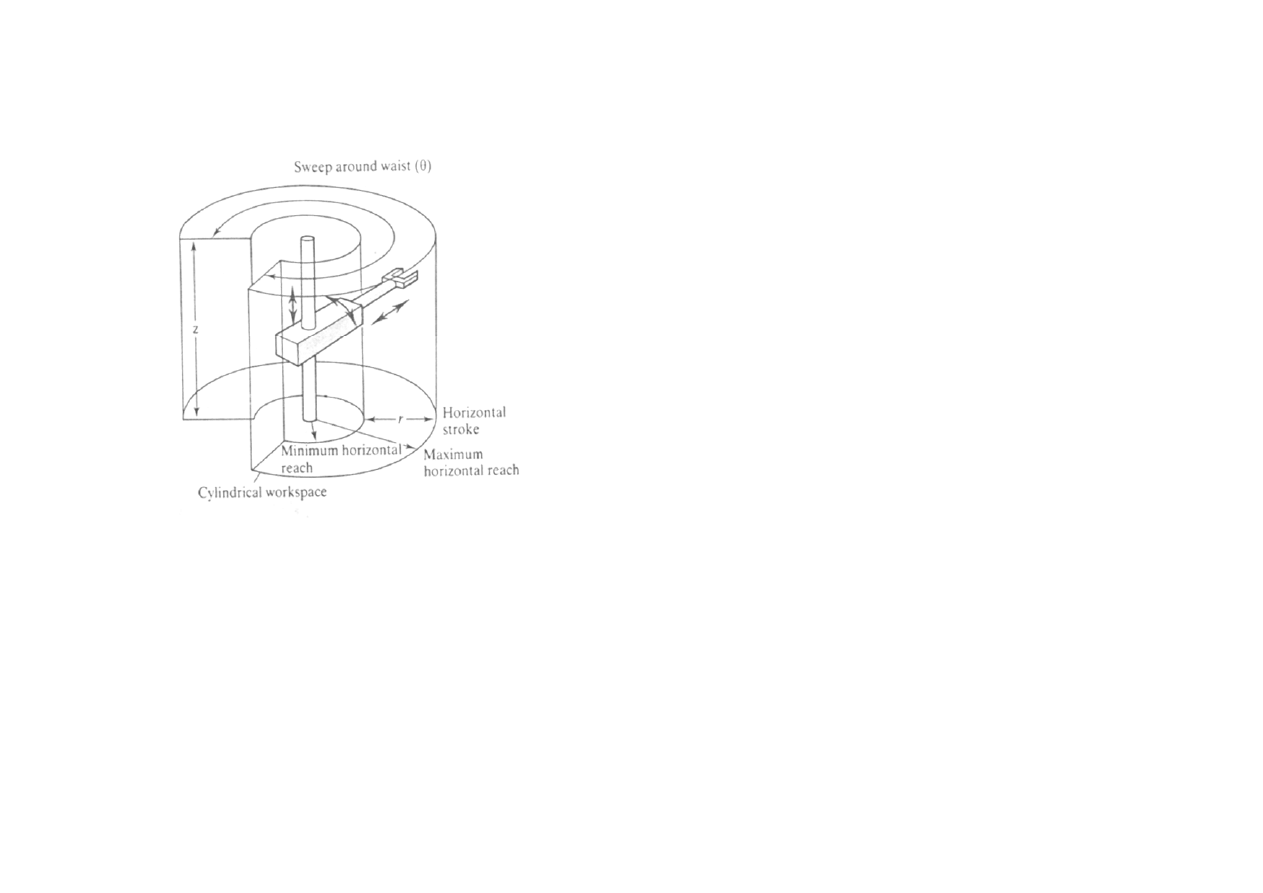
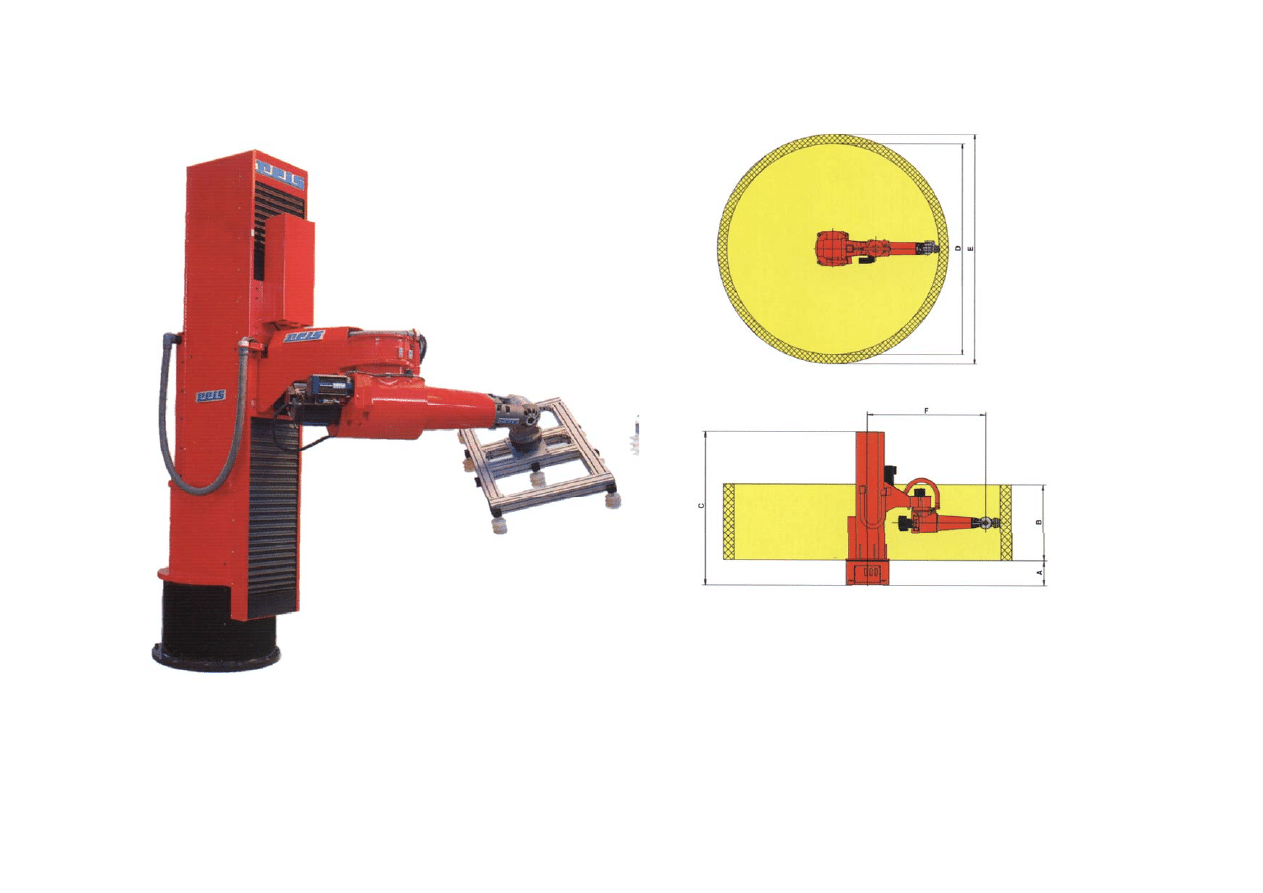
CYLINDRYCZNE RAMIĘ MANIPULATORA PRP
Najczęściej stosowane w manipulatorach
o 4-5 DOM
Zakres obrotu kolumny 270º - 360º
Napęd płynowy lub elektryczny
Zastosowanie:
manipulacja (paletyzacja, załadunek i rozładunek maszyn)
2005 wg IFR 12% instalacji

Roboty Przemysłowe
KRIM, AGH w Krakowie
21
Charakterystyka:
+ większa przestrzeń robocza niż PPP
+ zmiana orientacji ułatwia dostęp manipulatora do maszyn
+ prosty model kinematyczny i dynamiczny
- tył robota może wejść do PR
- problemy techniczne zastosowania prowadnic ruchów postępowych
- duże obciążenie wysokiej kolumny ramienia
1960, Versatran Robot (H. Johnson, V. Milenkovic)
AMF Corporation
Pierwszy robot cylindryczny
Roboty Przemysłowe
KRIM, AGH w Krakowie
22
Teleskopowe prowadnice ruchów postępowych
+ mała objętość
+ duża sztywność
+ mniejsze obciążenia
(obrót kolumny z
wsuniętym członem nr 3)
Roboty Przemysłowe
KRIM, AGH w Krakowie
23
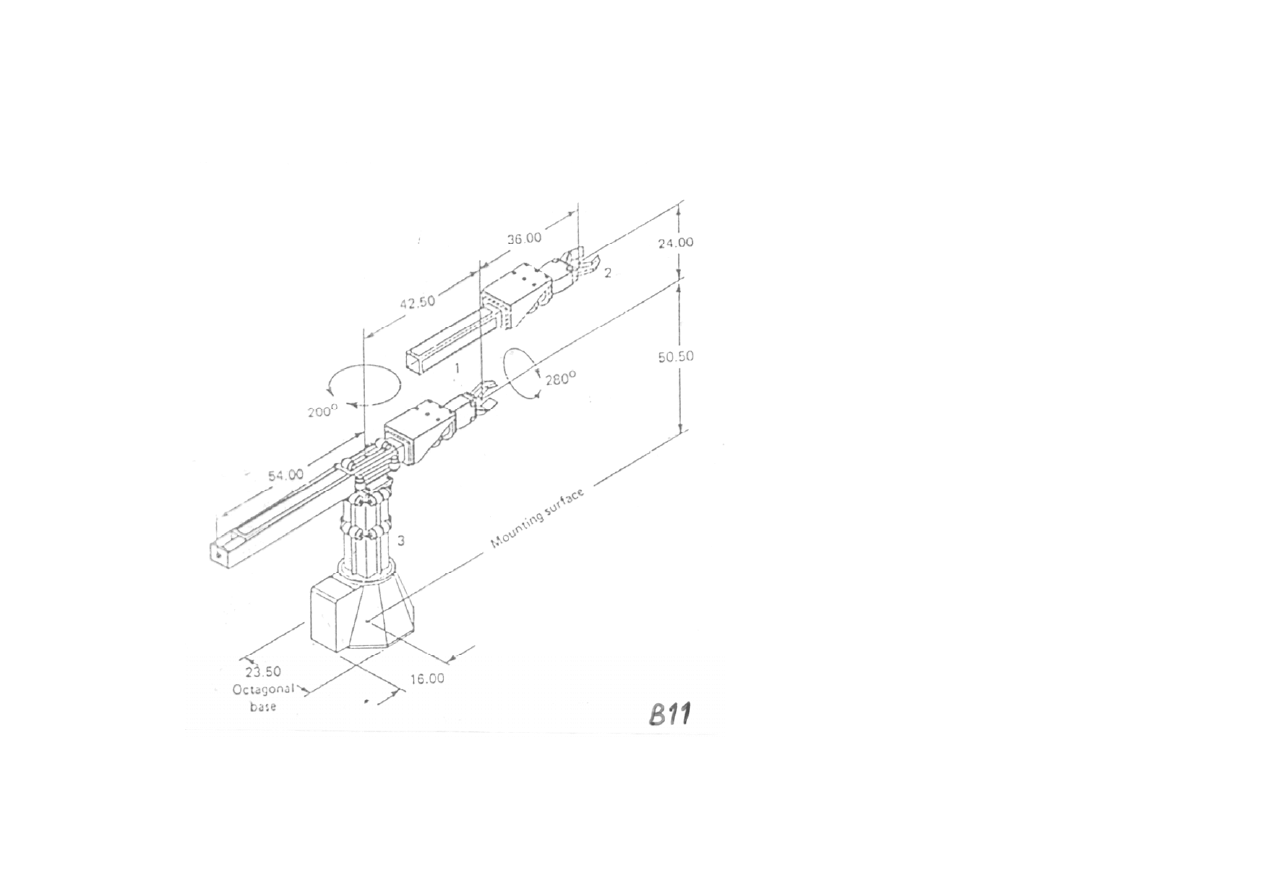
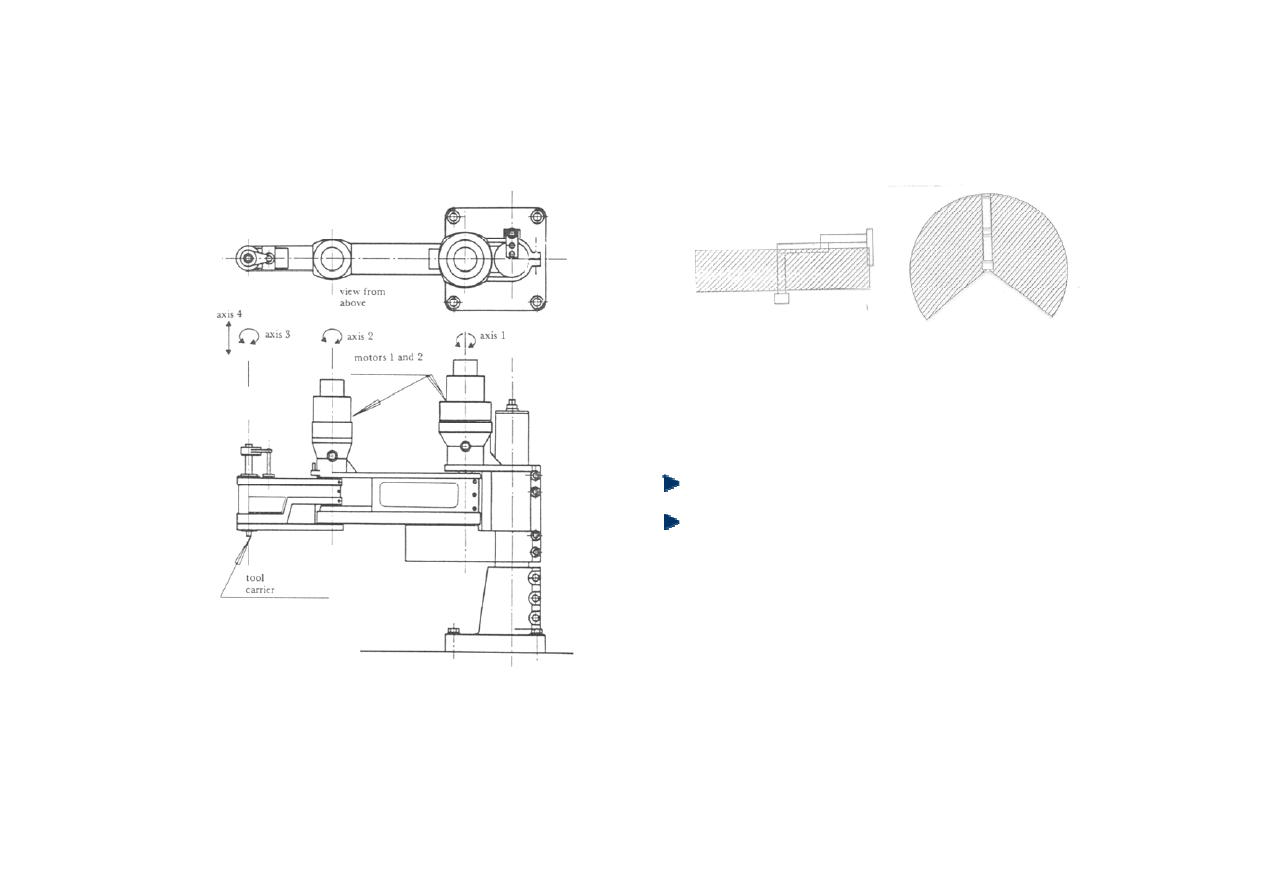
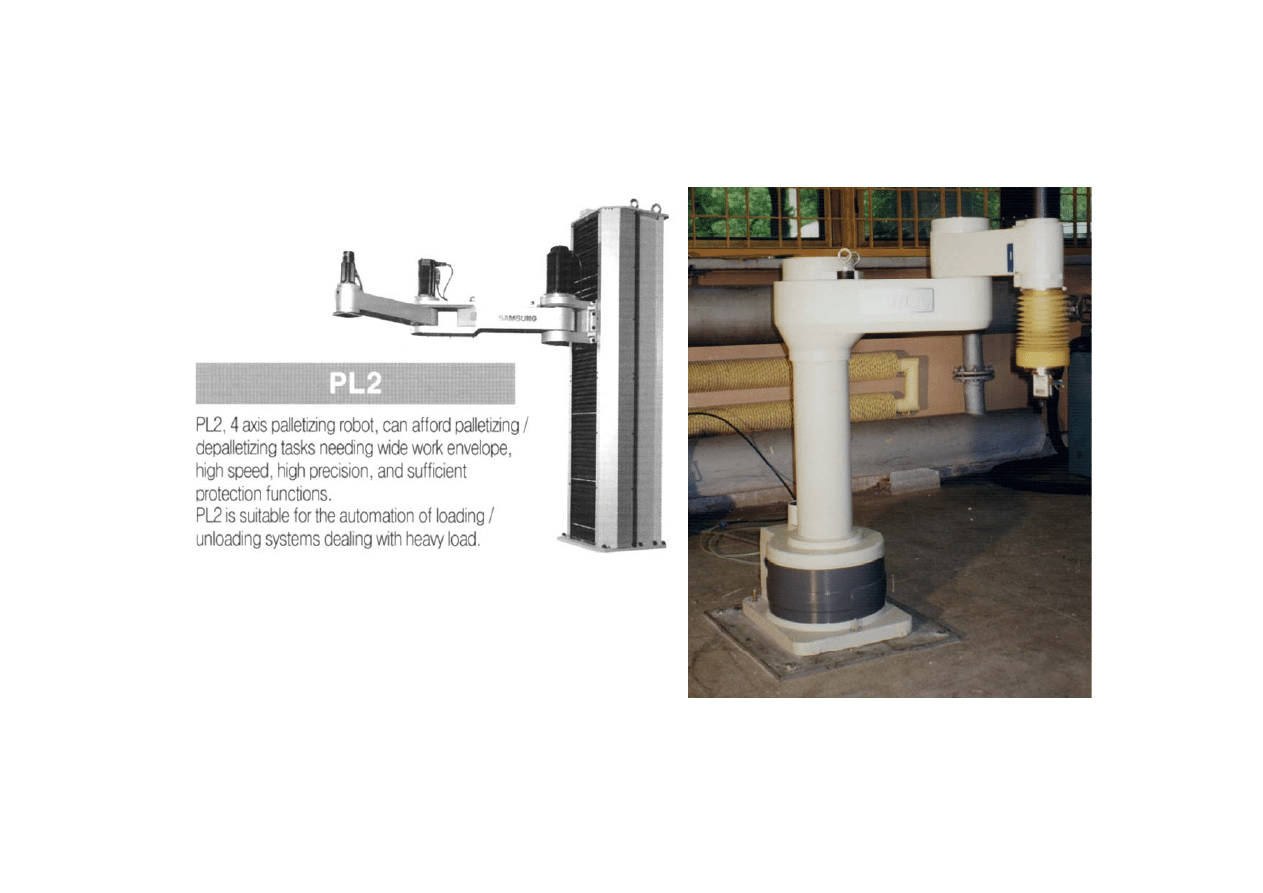
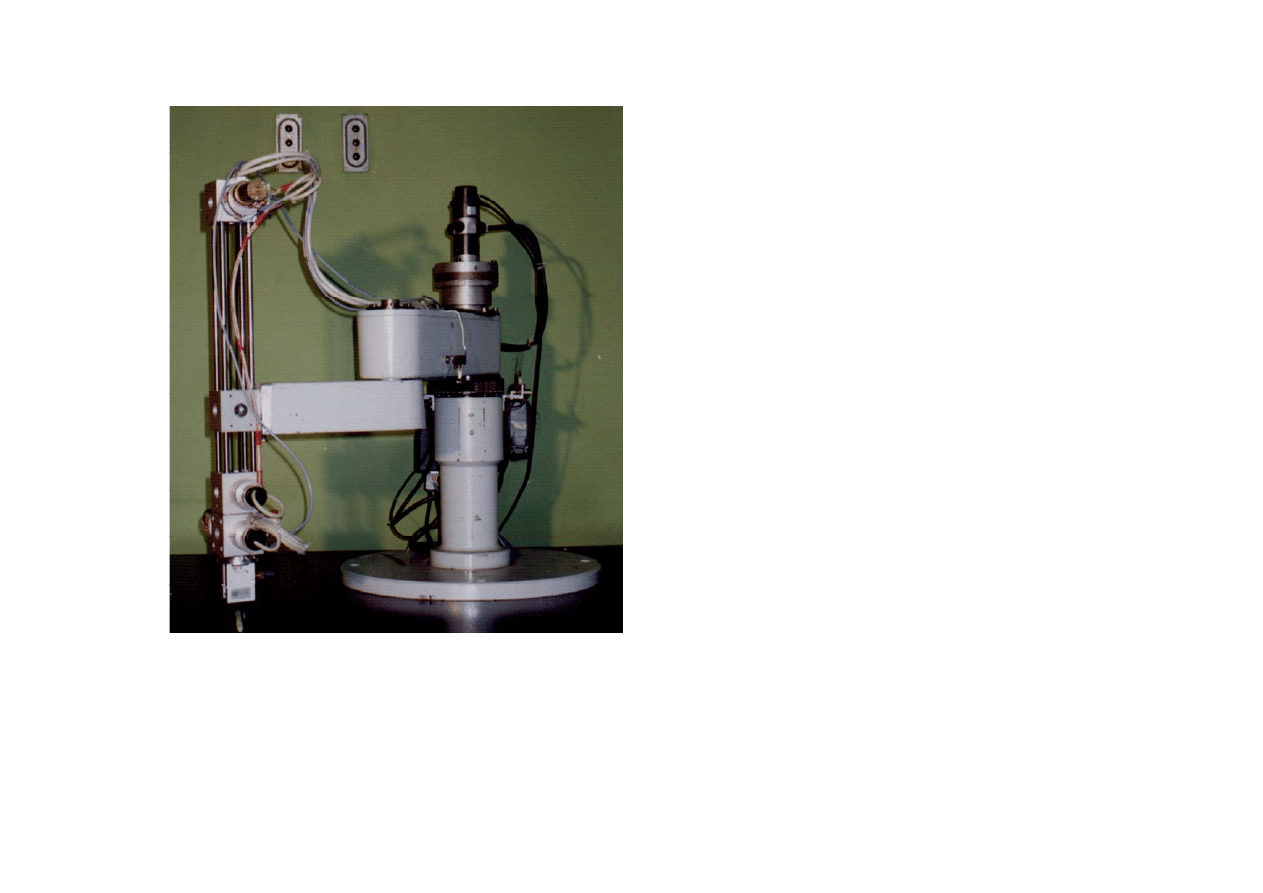
Selective Compliance Assembly Robot Arm – SCARA RRPR
Selectively Compliant Articulated Robot Arm
Ramię RRP lub PRR
Napęd: elektryczny
Zastosowanie:
manipulacja,
montaż
Zastosowanie przekładni
cięgnowych pozwala: albo
utrzymać stałą orientację efektora,
albo programowo ją zmieniać w
czasie ruchu ramienia.
2005 wg IFR około 8% instalacji
Roboty Przemysłowe
KRIM, AGH w Krakowie
24
Adept One
Samsung
FARA PL2
PRRR
RRPR
Roboty Przemysłowe
KRIM, AGH w Krakowie
25
KRiM WIMIR AGH
Tomasz Bojko
Roboty SCARA (4 DOM) stosuje się z urządzeniami orientującymi
(2-3 DOM). Tworzą one strukturę zespołową.
Roboty Przemysłowe
KRIM, AGH w Krakowie
26
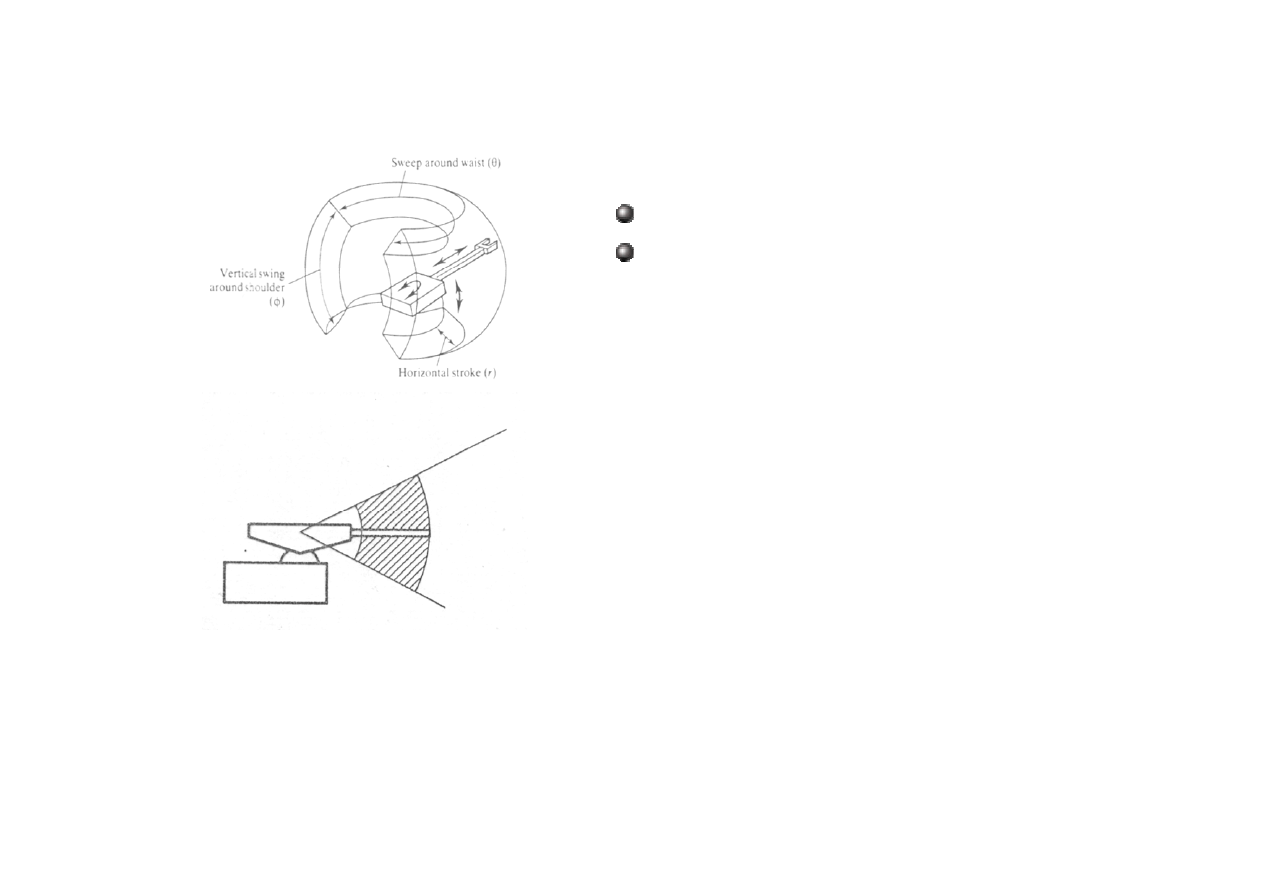
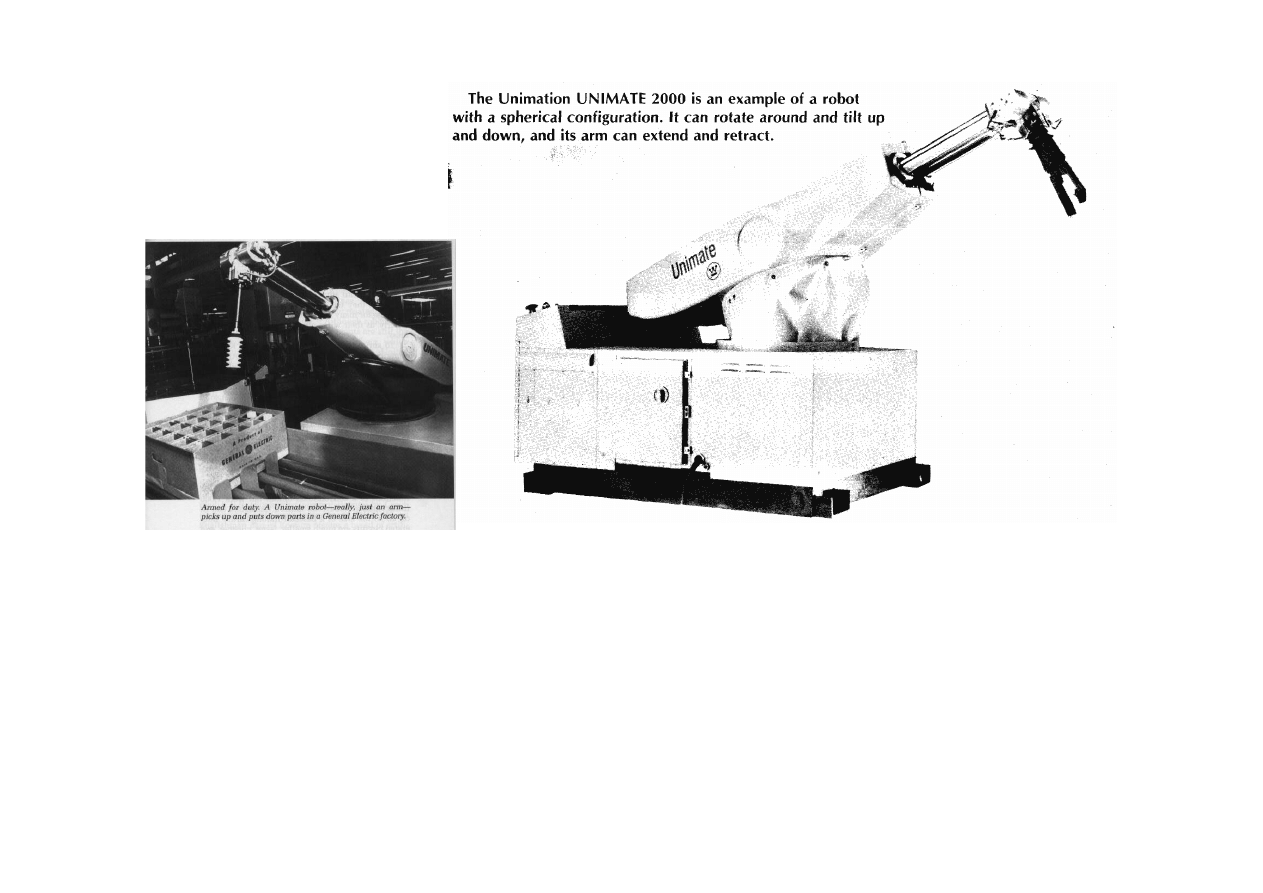
SFERYCZNE RAMIĘ MANIPULATORA RRP
2
β≤60º
Napędy hydrauliczne:
duże obciążenia
utrzymanie pozycji przy dużym
obciążeniu statycznym
Zastosowanie:
Przenoszenie ciężkich przedmiotów
Obecnie nie produkowane
Charakterystyka:
+ łatwe nadawanie orientacji
+ ostatni ruch nie zmienia orientacji
+ korzystny sposób obciążenia konstrukcji
+ duża przestrzeń robocza
- podatność konstrukcji ramienia
- złożony model kinematyczny
i dynamiczny
Roboty Przemysłowe
KRIM, AGH w Krakowie
27
Unimate 2000
Unimate - Pierwszy robot przemysłowy:
Zaprojektowany 1956 G Devol, J. Engelberger
Zastosowany 1961 General Motors
Roboty Przemysłowe
KRIM, AGH w Krakowie
28
Odmiana struktury PRR
Reis RH (PRR RRR)
Wyszukiwarka
Podobne podstrony:
9 Struktury manipulatora o otwartym łańcuchu
10 Struktury manipulatora o zamkniętym łańcuchu kinematycznym
Jarzębowski Struktura łańcucha dostaw przetwórstwa nmięsa
Struktura łańcucha logistycznego
Struktura pierwszorzędowa to sekwencja aminokwasów w łańcuchu polipeptydowym
Jarzębowski Struktura łańcucha dostaw przetwórstwa mleka
etanol - otwarte, Napisz wzorami strukturalnymi (zaznacz ewentualny udział koenzymów):
etanol - otwarte, Napisz wzorami strukturalnymi (zaznacz ewentualny udział koenzymów):
11 Struktury kiści manipulatorów
regulacje - otwarte, Napisz wzorami strukturalnymi (zaznacz ewentualny udział koenzymów):
scen lekcji otwartej kl 1 ustalanie wzorów strukturalnych i modelowanie czasteczekx
scen lekcji otwartej kl 1 ustalanie wzorów strukturalnych i modelowanie cząsteczek załącznikx
Aspekty prawne ratowania życia, łańcuch przeżycia, struktura SOR
Jarzębowski Struktura łańcucha dostaw przetwórstwa owoców warzyw
giełdy 4 kolo, witaminy - otwarte, Napisz wzorami strukturalnymi (zaznacz ewentualny udział koenzymó
CHRAPEK,podstawy robotyki, Roboty i manipulatory o strukturach równoleg ych
Struktury zespołowo łańcuchowe
Jarzębowski Struktura łańcucha dostaw przetwórstwa nmięsa
więcej podobnych podstron