I EA Podstawy robotyki – laboratorium
II SERIA
5. Modelowanie dynamiki ramienia robota
metodą Lagrange'a
Celem ćwiczenia jest zapoznanie się z oddziaływaniami dynamicznymi,
jakie występują w parach kinematycznych robotów wieloprzegubowych.
Analiza dynamiki powinna być przeprowadzona na podstawie uproszczonego
modelu matematycznego pojedynczego ramienia napędzanego w przegubie.
Model ten powinien być wyprowadzony metodą równań Lagrange'a II
rodzaju na podstawie podanych danych i założeń upraszczających. Proces
modelowania dynamiki może być wspomagany za pomocą pakietu
SYMBOLIC TOOLBOX Matlaba. Po wyznaczeniu równań dynamiki przegubu
należy wykonać badania symulacyjne modelu w środowisku Matlab lub
Matlab-SIMULINK.
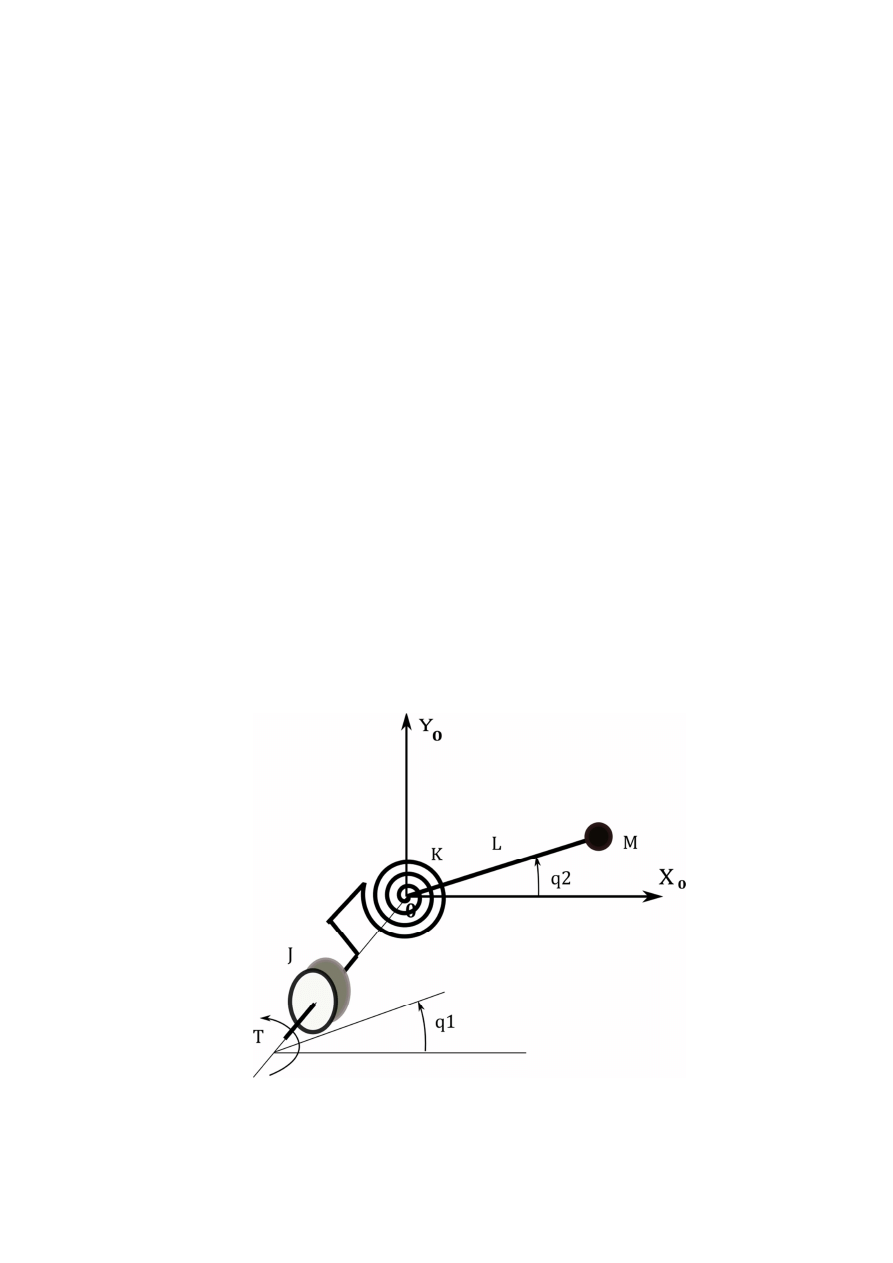
1. Dane jest ramię robota z przegubem uwzględniającym jego sztywność i
bezwładność (rys. 1). Model fizyczny ramienia stanowi masa skupiona M na
jego końcu. Długość ramienia liczona od osi obrotu wynosi L.
Rys. 1. Analizowany ramię robota
Rys. 1. Model fizyczny ramienia i przegubu robota: M – masa ramienia, L – długość
ramienia, K - sprężystość przegubu, J – moment bezwładności silnika i prze-
kładni, q1 – położenie przegubu, q2 – położenie ramienia, T – moment napędowy
2. Wiedząc, że energia kinetyczna jest równa
K =
1
2
J ˙
q
1
2
+
1
2
J
r
˙
q
2
2
,
J
r
=
ML
2
,
a energia potencjalna wynosi
P=
1
2
K
(
q
1
−
q
2
)
2
+
M g Lsin (q
2
)
wyznaczyć funkcję Lagrange'a L=K-U układu.
3. Wyprowadzić dynamiczne równania ruchu układu wyznaczając wymagane
pochodne i podstawiając je do równań Lagrange'a II rodzaju
d
d t
∂
L
∂ ˙q
i
−
∂
L
∂
q
i
=
T
i
, i=1,2 .
4. Przedstawić wyprowadzone równania w notacji macierzowej
D(q) ¨q+C (q , ˙q)+G(q)=T
gdzie: D – macierz bezwładności układu, C – macierz sił odśrodkowych i
Coriolisa, G – wektor grawitacji, T – wektor momentów zewnętrznych.
5. Rozwiązać powyższy układ ze względu na przyspieszenia
¨q= D(q)
−
1
[
T −C (q , ˙q)−G (q)
]
a następnie poprzez podstawienie
˙
q
1
=ω
1,
˙
q
2
=ω
2
sprowadzić do układu
czterech równań różniczkowych I rzędu. Układ taki stanowi podstawę do
zastosowania procedur całkowania numerycznego w Matlabie.
6. Zakodować powyższy model w postaci m-funkcji Matlaba
dq=nazwa_
układu(t,q)
, gdzie:
q=[q
1
q
2
ω
1
ω
2
]
T
- wektor współrzędnych,
dq=[ ˙
q
1
˙
q
2
˙
ω
1
˙
ω
2
]
T
- wektor pochodnych po czasie wektora współrzędnych.
7. Stosując procedurę całkowania numerycznego
ode45
lub złożony w postaci
bloków w Simulinku schemat wykonać symulację zachowania się układu dla:
a) różnych przebiegów czasowych wymuszeń: moment stały, sinusoidalny,
ramp, chirp;
b) dla różnych wartości współczynnika sprężystości: 0, 100, 1000, 10000.
c) dla dołączonego do modelu tarcia wiskotycznego (proporcjonalnego do
prędkości,
T
t i
=
k
v i
˙q
i
=
k
v i
ω
i
, i=1,2
).
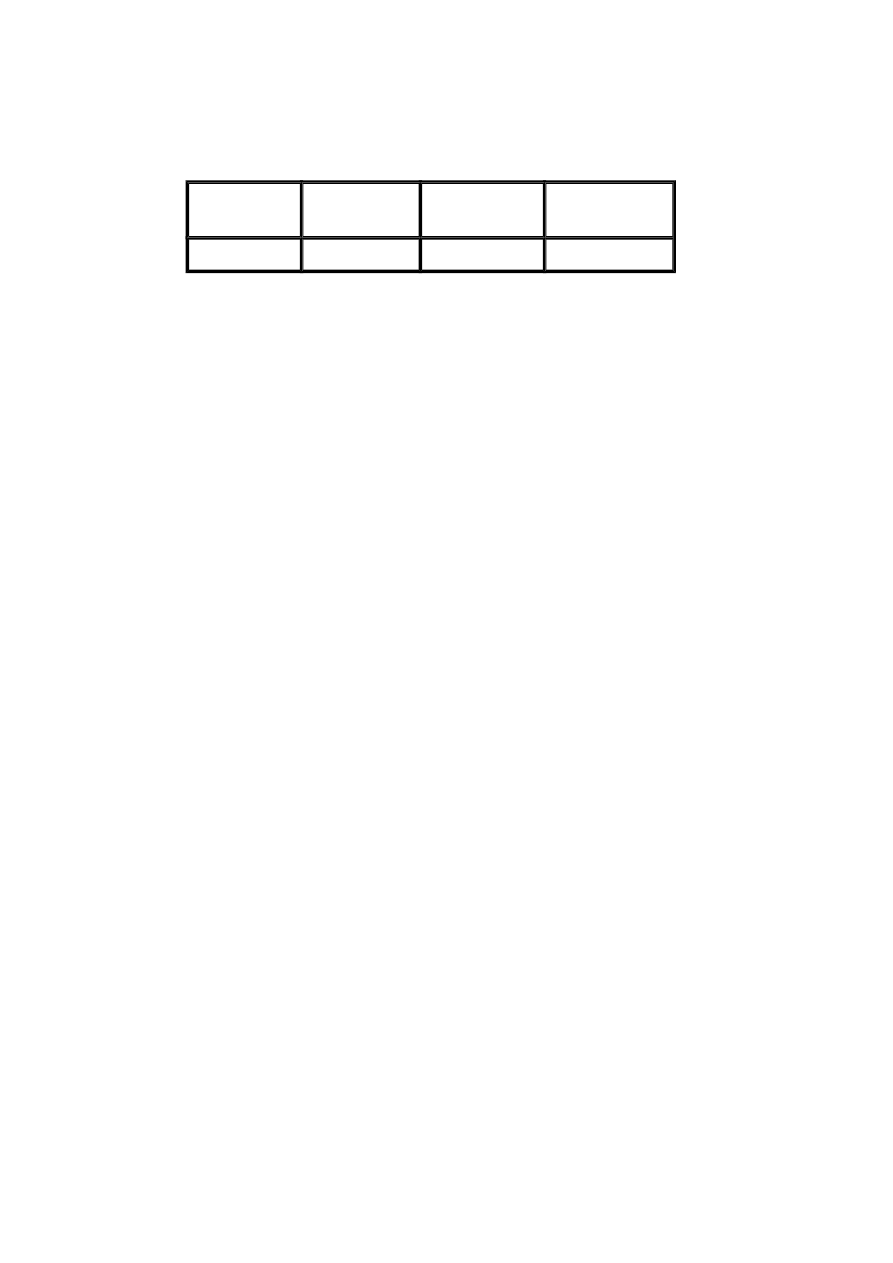
L [m]
*)
M [kg]
J [kgm^2]
K
[Nm/rad^2]
0,5
1,0
0,0025
100
*)
Wartości parametrów mogą być zmienione przez prowadzącego.
8. Opracować wnioski z ćwiczenia; zamieścić otrzymane przebiegi symulacyjne.
Wyszukiwarka
Podobne podstrony:
czlony dynamiczne id 128806 Nieznany
Dynamika id 145246 Nieznany
PPK02 modelowanie matinf id 381 Nieznany
modelowanie twarde id 305332 Nieznany
Modele dynamiczne id 305054 Nieznany
Dynamika a id 145299 Nieznany
KRYTYKA LITERACKAwpigulce id 25 Nieznany
Dynamika I id 145322 Nieznany
kurs ZERO OSN wiczenie 03 id 25 Nieznany
Analiza dynamiki id 59972 Nieznany
dynamika 4 id 145261 Nieznany
LAB2 pret krata dynamika id 259 Nieznany
LAB1 MES MATLAB statyka 1 id 25 Nieznany
4 dynamika id 38203 Nieznany (2)
lab11 RapidPrototyping EN id 25 Nieznany
programowanie dynamiczne id 396 Nieznany
ksiegowosc ngo,24 06 2010 id 25 Nieznany
więcej podobnych podstron