Dr inż. Michał Chłędowski
AUTOMATYKA
Materiały dydaktyczne
dotyczące zagadnień przewidzianych w I pracy kontrolnej
Zakres tematyczny: Podstawowe człony automatyki, opis własności statycznych i dynamicznych,
transmitancja operatorowa, charakterystyka skokowa, charakterystyka częstotliwościowa
Treść zadania:W pracy należy zrealizować następujące zadania:
1. Wybrać dowolny element automatyki. Narysować go schematycznie oraz narysować jego schemat
blokowy z zaznaczeniem sygnału wejściowego i wyjściowego a także przyjąć liczbowe wartości
parametrów charakteryzujących ten element.
2. Wyprowadzić równanie opisującego właściwości dynamiczne i statyczne elementu automatyki w
dziedzinie czasu.
3. Określić transmitancję przejścia opisywanego elementu z równania operatorowego uzyskanego w
wyniku zastosowania przekształcenia Laplace’a do równania w dziedzinie czasu.
4. Wyznaczyć wzór na charakterystykę skokową korzystając z odwrotnego przekształcenia Laplace’a i
tablic przekształceń Laplace’a. Narysować wykres charakterystyki skokowej korzystając z
dowolnego programu komputerowego (Matlab, Scilab, Codas, Origin). Sprawdzić wybrane punkty
wykresu wykonując obliczenia h(t) ze wzoru dla odpowiednich wartości czasu. Wyniki obliczeń
zamieścić w tabelce.
5. Wyznaczyć wzory na charakterystykę częstotliwościową (amplitudowo-fazową) badanego elementu
oraz na charakterystyki logarytmiczne: amplitudową i fazową. Narysować wykresy tych
charakterystyk. Sposób rysowania i sprawdzania jak w pkt.4.
6. Wszystkie punkty pracy kontrolnej należy wykonać ze zrozumieniem realizowanych czynności i
operacji, podchodząc krytycznie do otrzymywanych wyników i przeprowadzić analizę ich
poprawności.
Tok postępowania:
1. Wybrać dowolny element automatyki. Może to być element mechaniczny, elektryczny,
pneumatyczny, hydrauliczny a także mieszany, np. mechaniczno-elektryczny. Warto w tym
celu przeglądnąć kilka pozycji literatury z zakresu automatyki i znaleźć przykład, który
przynajmniej częściowo będziemy mogli wykorzystać. Ważnym jest, aby wybrany przykład
elementu automatyki był zrozumiały z punktu widzenia jego budowy, zasady działania i
przeznaczenia. Rozważnym jest wybieranie przykładu o średniej skali trudności. W
szczególności chodzi o to, aby był to element liniowy a równanie opisujące właściwości
dynamiczne było równaniem różniczkowym (całkowym) 1-go lub 2-go rzędu (chociaż
oczywiście może być i wyższego). Nie będą akceptowane przykłady z elementem
proporcjonalnym jako zbyt proste. Tak więc odpadają elementy w postaci np. belki
dwuramiennej czy dzielnika napięcia. Wybrany element należy przedstawić graficznie w
postaci prostego ale zrozumiałego rysunku a także jako schemat blokowy elementu
automatyki w postaci prostokąta z wyraźnym zaznaczeniem wielkości fizycznych, które w
naszym przykładzie będą pełnić rolę sygnału wejściowego i sygnału wyjściowego. Proszę
podać miana tych sygnałów a także przyjąć przykładowe (ale rozsądne!) wartości liczbowe
parametrów występujących w opracowywanym przykładzie.
2. Dla tak zdefiniowanego elementu automatyki wyznaczyć opis matematyczny jego
właściwości. Przeprowadzając analizę pracy elementu oraz wykorzystując wiedzę ze
stosownych, mających w danym przypadku zastosowanie dziedzin, należy napisać równanie
w dziedzinie czasu (najczęściej różniczkowe), wiążące sygnał wyjściowy z sygnałem
wejściowym i parametrami charakteryzującymi badany element. Tak napisane równanie da
nam opis właściwości dynamicznych elementu. Przyrównując do zera wszystkie pochodne
występujące w równaniu otrzymamy tzw. równanie statyki, czyli zależność sygnału
wyjściowego od wejściowego w stanie ustalonym.
3. Zastosowanie przekształcenia Laplace'a do równania różniczkowego pozwoli napisać
równanie operatorowe. Równanie to powinno być równaniem algebraicznym a zmienną
niezależną będzie operator Laplace'a „s”. Korzystając z definicji transmitancji
operatorowej, którą najprościej można zapisać jako: transmitancją operatorową G(s)
nazywamy stosunek transformaty sygnału wyjściowego Y(s) do transformaty sygnału
wejściowego X(s) przy zerowych warunkach początkowych, przekształcimy równanie
operatorowe tak, aby napisać wzór na transmitancję operatorową G(s)=Y(s)/X(s).
4. Charakterystyka skokowa h(t) jest odpowiedzią badanego członu (układu) na wymuszenie
skokowe. Wymuszenie skokowe matematycznie zapisujemy jako a 1(t), gdzie a jest
amplitudą wymuszenia a pogrubiona jedynka charakteryzuje skokową zmianę funkcji
wymuszającej. Transformata wymuszenia skokowego ma postać: a/s. Transformatę
charakterystyki skokowej możemy wyznaczyć bezpośrednio ze wzoru na G(s) wstawiając w
miejsce ogólnie zapisanego sygnału wejściowego X(s) transformatę wymuszenia
skokowego. Otrzymamy: H s=G s
a
s
. W celu znalezienia wzoru na charakterystykę
skokową badane elementu w dziedzinie czasu należy zastosować odwrotne przekształcenie
Laplace'a. Zapiszemy to następująco: h t= L
−
1
[
G s
a
s
]=
a L
−
1
[
G s
1
s
] . Oryginał
wyrażenia z nawiasu kwadratowego znajdziemy w tablicach przekształceń Laplace'a.
Korzystając z dowolnego graficznego programu komputerowego należy narysować wykres
charakterystyki skokowej. Dla sprawdzenia poprawności wyniku należy wyliczyć
przynajmniej 3 - 4 wartości h(t) dla wybranych wartości czasu i porównać z wykresem.
5. Charakterystyki częstotliwościowe rozpatrywać będziemy w oparciu o pojęcie transmitancji
widmowej, którą definiujemy następująco: jest to transmitancja operatorowa, w której za
operator Laplace'a s będący liczbą zespoloną, podstawiamy tylko część urojoną tej liczby,
czyli jω, gdzie ω – pulsacja zmieniająca się w zakresie od 0 do +∞. Czyli
G j =G s∣
s= j
. Będziemy rozpatrywać dwa rodzaje charakterystyk:
- charakterystykę amplitudowo-fazową,
- logarytmiczne charakterystyki: amplitudową i fazową.
Dla znalezienia wzoru a następnie narysowania na jego podstawie wykresu ch-ki a-f
konieczne jest wydzielenie części rzeczywistej P(ω) i części urojonej Q(ω) z ogólnej postaci
charakterystyki amplitudowo-fazowej G(jω). Dla wyznaczenia charakterystyk
logarytmicznych: amplitudowej i fazowej należy wyznaczyć wzory na te charakterystyki.
Wyznaczamy je korzystając z definicji. Amplitudową charakterystykę logarytmiczną
definiujemy następująco: L(ω)=20logM(ω), gdzie M =
P
2
Q
2
, zaś
fazową charakterystykę logarytmiczną: φ(ω)=arctan
Q(
ω)
P (
ω)
. Charakterystyki
amplitudową i fazową rysujemy jedna pod drugą. L(ω) wyrażamy w [dB] zaś φ(ω)
najczęściej w stopniach, rzadziej w radianach. Na osi poziomej odkładamy pulsację ω w
skali logarytmicznej (jednakowym odcinkom na tej osi odpowiada dziesięciokrotny wzrost
pulsacji). Zakres zmian ω dobieramy w zależności od parametrów i własności badanego
elementu. Wybieramy przedział w którym zachodzą istotne zmiany. Charakterystyki
częstotliwościowe (amplitudowo-fazową i logarytmiczne) rysujemy wykorzystując
odpowiedni program komputerowy. W celu sprawdzenia poprawności przeprowadzonych
działań liczymy dla wybranych wartości ω (w tym dla 0 i ∞) poszczególne parametry
badanych charakterystyk, czyli: P(ω), Q(ω), L(ω) oraz φ(ω) , zapisujemy w tabelce i
porównujemy z otrzymanymi wykresami.
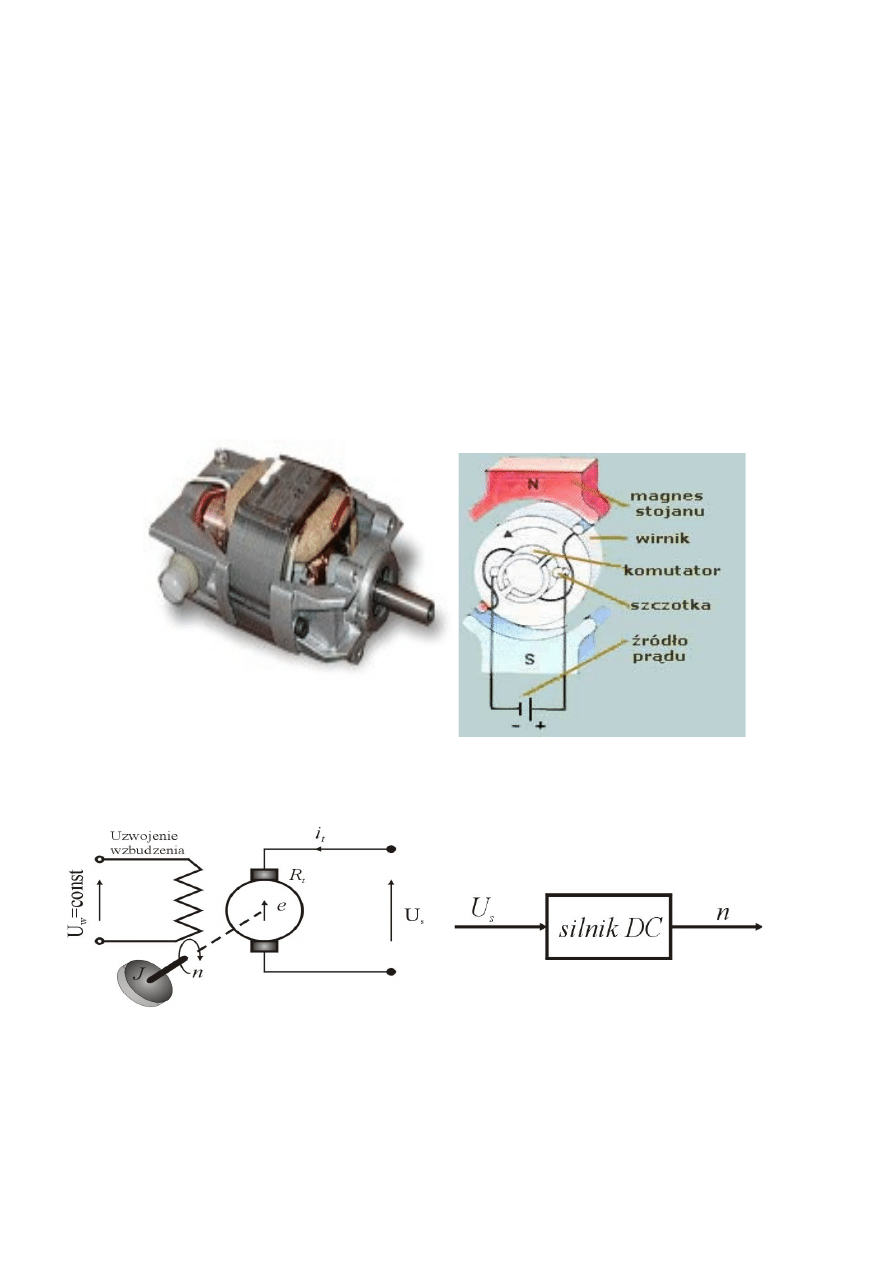
Przykład rozwiązania: obcowzbudny silnik prądu stałego (DC)
Krok I – wybór elementu do badań
Jako przedmiot badań wybierzemy obcowzbudny silnik elektryczny prądu stałego. Konstrukcję
takiego silnika przedstawia rys.1 a jego zasadę działania – rys. 2.
Rys. 1. Budowa silnika DC
Rys. 2. Zasada działania silnika DC
Dla napisania równań opisujących dynamiczne własności silnika wygodnie jest przedstawić
schematycznie obwody elektryczne i model mechaniczny wirnika (rys. 3). Schemat blokowy silnika
DC jako elementu automatyki przedstawia rys. 4.
Wartości liczbowe parametrów charakteryzujących silnik prądu stałego przyjmiemy po
wyprowadzeniu wzorów. Wówczas będzie znany pełny zestaw tych parametrów.
Rys. 3. Uproszczony schemat silnika DC
Rys. 4. Schemat blokowy silnika DC
Krok II – Model matematyczny silnika DC
Analizę tego układu przeprowadzimy przy założeniu, że dynamikę silnika obcowzbudnego prądu
stałego można, z wystarczającym przybliżeniem, opisać za pomocą równania różniczkowego
pierwszego rzędu. Dokładniejsza analiza wymagałaby uwzględnienia szeregu zjawisk (chociażby
indukcyjność obwodu twornika), które poprawiają jakość odzwierciedlenia rzeczywistego
zachowania silnika ale znacznie komplikują model. Tutaj ograniczymy się opisem wynikającym z
rys.3. Wielkością sterowaną jest prędkość obrotowa silnika n a wielkością sterującą – napięcie
U
s
przyłożone do obwodu twornika (rys. 4.).
Uzwojenie wzbudzenia zasilane stałym napięciem
U
w
wytwarza stałe pole magnetyczne
pomiędzy nabiegunnikami, stąd nazwa silnik obcowzbudny (nie ze stałymi magnesami).
Obwód elektryczny twornika uwzględnia oporność twornika R
t
oraz siłę elektromotoryczną
indukcji e. Wartość siły elektromotorycznej możemy wyrazić zależnością:
e=c n
(1)
gdzie: c – stała konstrukcyjna maszyny elektrycznej,
Φ – strumień pola magnetycznego wzbudzenia,
n - prędkość obrotowa silnika.
Ponieważ napięcie wzbudzenia
U
w
jest stałe to wytwarzany strumień pola magnetycznego
wzbudzenia Φ jest również stały. Możemy zatem napisać:
e=k
e
n
(2)
gdzie:
k
e
- stała elektromechaniczna silnika.
Z prawa Kirchhoffa zastosowanego do obwodu twornika otrzymamy równanie:
e=k
e
n=U
s
−
i
t
R
t
(3)
Z II zasady dynamiki Newtona dla ruchu obrotowego wynika, że:
J
dn
dt
=
M
e
−
M
(4)
gdzie: J
- całkowity moment bezwładności (wszystkich elementów wirujących),
M
e
- elektromagnetyczny moment obrotowy wytwarzany przez wirnik silnika,
M
- moment sił hamujących (obciążenie silnika).
Moment obrotowy wytwarzany przez silnik możemy wyliczyć z zależności:
M
e
=
c
m
Φi
t
=
k
m
i
t
(5)
gdzie:
k
m
=
c
m
Φ - stała momentowa.
Ostatecznie, podstawiając do równania (4) zależności (3) i (5) otrzymujemy równanie dynamiki
silnika prądu stałego:
JR
t
k
m
k
e
dn
dt
n=
1
k
e
U
s
−
R
t
k
e
k
m
M
(6)
Widzimy, że w równaniu (6) występują dwie wielkości wejściowe: napięcie sterujące U
s
oraz
moment obciążenia M. W układzie tym sterujemy prędkością obrotową n(t) za pomocą napięcia
twornika
U
s
t
przy występowaniu zakłóceń w postaci zmiennego obciążenia M(t).
Mając wszystkie parametry występujące w opisie własności dynamicznych silnika możemy określić
ich wartości liczbowe.
Wykorzystamy dane silnika wykonawczego produkcji krajowej PZTK88-35TRR. Producent
dostarcza następujących danych:
•
Moment długotrwały (dla n=0) – 0,55 Nm,
•
Napięcie maksymalne zasilania – 35 V,
•
Prędkość maksymalna - 3200 obr/min,
•
Moment maksymalny - 2,8 Nm,
•
Prąd maksymalny - 27 A,
•
Stała momentowa - k
m
=
c
m
Φ=
M
e
i
t
=
0,105 Nm / A ,
•
Stała elektromechaniczna silnika - k
e
=
c
Φ= e
n
=
11 V /1000 obr /min ,
•
Rezystancja twornika -
R
t
=
0,56
,
•
Indukcyjność twornika - L
t
=
0,9 mH ,
•
Moment bezwładności -
J =1,45∗10
−
4
kgm
2
.
Równanie (6) warto zapisać w skróconej postaci:
T
dnt
dt
nt =k
u
U
s
t −k
o
M t
(7)
gdzie: T =
JR
t
k
m
k
e
=
1,45⋅10
−
4
⋅
0,56
0,105⋅0,011
=
0,07 ,
k
u
=
1
k
e
=
1
0,011
=
90,91 ,
k
o
=
R
t
k
e
k
m
=
0,56
0,105⋅0,011
=
484,85 .
Lewa strona tego równania opisuje własności silnika. Jak widzimy, w tym przypadku jest to
równanie różniczkowe I-go rzędu. Bardziej szczegółowa analiza silnika jako obiektu sterowania
(uwzględniająca indukcyjność obwodu twornika) prowadzi do równania II-go rzędu. Pojawia się
wówczas w tym równaniu druga stała czasowa, tzw. elektryczna, która jest przynajmniej o dwa
rzędy wielkości mniejsza aniżeli stała mechaniczna (T) co powoduje, że współczynnik przy drugiej
pochodnej jest bardzo mały i można go przy mniej dokładnej analizie zaniedbać.
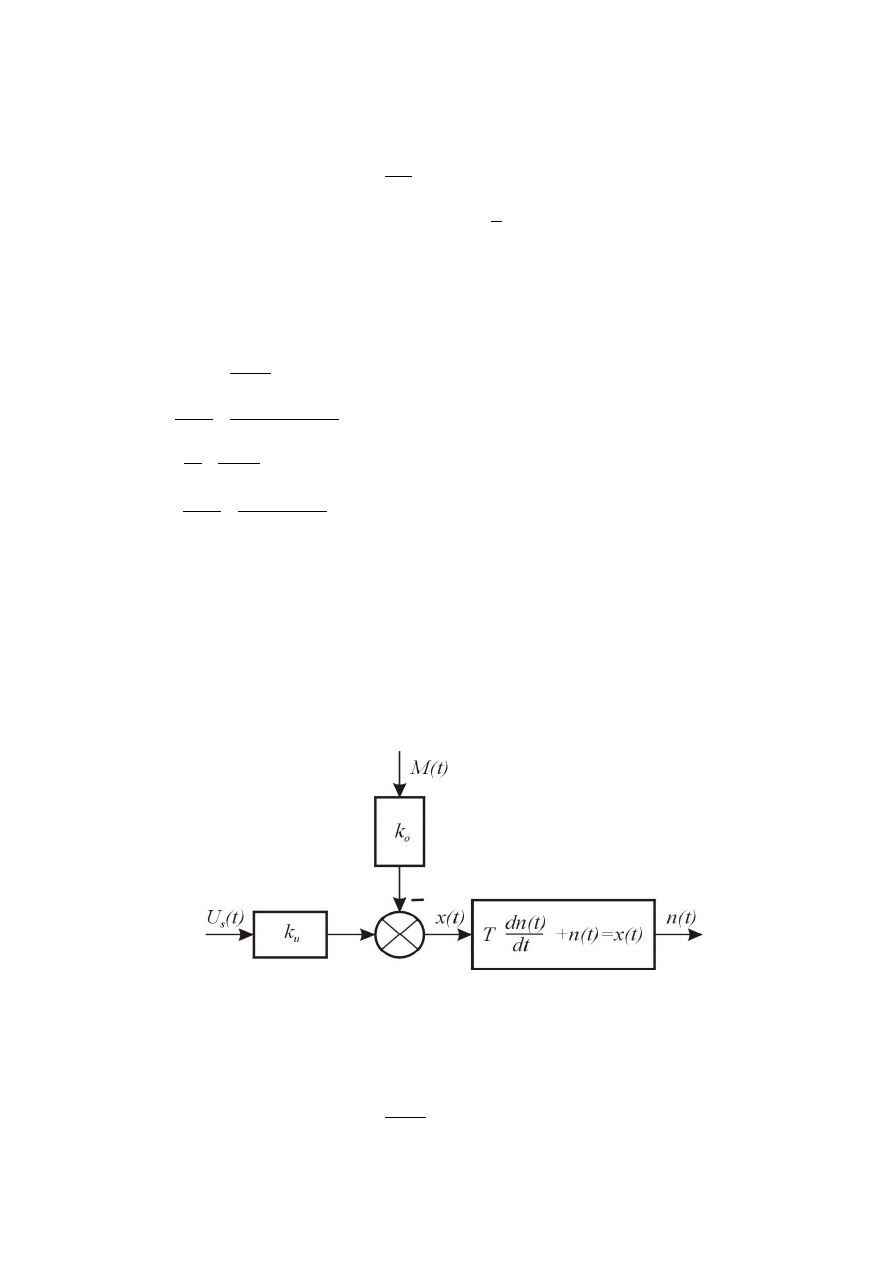
Po prawej stronie równania występuje sygnał sterujący (napięcie twornika) i sygnał zakłócający
(zmienny moment obciążenia). Strukturę sterowania silnika prądu stałego w pętli otwartej można
przedstawić jak na rys. 5.
Obliczymy transmitancję operatorową silnika przyjmując zgodnie z rys. 4 za sygnał wejściowy
napięcie U
s
t a za sygnał wyjściowy - prędkość obrotową n(t). Moment obciążający M(t) w
tym przypadku jest stały, w szczególności równy zero. Równanie (7) w takim przypadku przyjmie
postać:
T
dnt
dt
nt =k
u
U
s
t
(8)
Z równania (8) opisującego własności dynamiczne silnika łatwo uzyskać równanie „statyki”.
Rys. 5. Schemat blokowy sterowania silnika w otwartej pętli
Charakterystyka statyczna to zależność sygnału wyjściowego od wejściowego w stanach
ustalonych. W stanach ustalonych wielkości wejściowe i wyjściowe nie zmieniają się (mamy
przecież stan ustalony). A jeśli tak, to wszystkie pochodne są równe zeru. Przyrównanie do zera
członów równania w których występują pochodne daje nam równanie statyki. W omawianym
przypadku równanie to przyjmie postać:
n
0
=
k
u
U
s0
(9)
gdzie indeks „0” oznacza wartość danej zmiennej w stanie ustalonym.
Krok III – Określenie transmitancji operatorowej G(s)
Równanie operatorowe otrzymamy stosując znane reguły przekształcenia Laplace'a. Symbol
różniczkowania
d
dt
zastępujemy operatorem Laplace'a „s”, zmienne uzależniamy również od
„s” i piszemy dużą literą, parametry stałe nie ulegają zmianie (nie podlegają przekształceniu). W
naszym przypadku, po zastosowaniu opisanych reguł do równania (8) otrzymamy równanie
algebraiczne:
T sN s N s =k
u
U
s
s
(10)
Teraz możemy napisać transmitancję operatorową badanego silnika DC. Przypomnimy definicję:
t
ransmitancją operatorową G(s) układu lub członu automatyki nazywamy stosunek transformaty
sygnału wyjściowego do transformaty sygnału wejściowego przy zerowych warunkach początkowych.
Rolę sygnału wyjściowego pełni prędkość obrotowa n(t) a jej transformata to N(s). Rolę sygnału
wejściowego pełni napięcie twornika, zwane napięciem sterującym U
s
t . Jego transformata to
U
s
s
. Tak więc:
G s =
N s
U
s
s
=
k
u
Ts1
=
90,91
0,07 s1
(11)
Krok IV – Charakterystyka skokowa
W pkt. „Tok postępowania„ (str.2) mamy podane podstawowe informacje na temat charakterystyki
skokowej (więcej w poz. [1], str.71) i w szczególności przytoczony jest wzór:
h t= L
−
1
[
G s
a
s
]=
a L
−
1
[
G s
1
s
]
(12)
Przeanalizujemy tok postępowania zmierzający do otrzymania charakterystyki skokowej zarówno
w postaci analitycznej (tabelka) jak i graficznej (wykres) w oparciu o wzór (12).
W badanym silniku maksymalne napięcie zasilające wynosi U
s
=
35[V ] . Przyjmiemy zatem, że
parametr „a” w równaniu (12) oznaczający amplitudę skoku wymuszającego równy będzie 35.
Wzór (12) przyjmie postać:
h t= L
−
1
[
k
u
Ts1
a
s
]=
a⋅k
u
L
−
1
[
1
sTs1
]=
3181,85 L
−
1
[
1
s0,07 s1
]
(13)
Symbol L
−
1
oznacza odwrotne przekształcenie Laplace'a. Oznacza on, że poszukujemy oryginału
z wyrażenia znajdującego się w nawiasie kwadratowym za tym symbolem. Do tego celu
wykorzystujemy tablice transformat Laplace'a. W każdym podręczniku do automatyki powinna
znajdować się taka, mniej lub bardziej rozbudowana tablica. Jeśli korzystamy z pozycji [1] to na
stronie 412 znajdziemy rozdział DODATEK a w nim bardzo rozbudowaną tablicę. Korzystanie z
takiej tablicy w celu znalezienia odwrotnego przekształcenia Laplace'a polega na znalezieniu w
drugiej kolumnie wyrażenia identycznego jak nasze wyrażenie w nawiasie kwadratowym i
odczytaniu w trzeciej kolumnie oryginału, który będzie poszukiwanym wzorem charakterystyki
skokowej. Poszukujemy zatem w drugiej kolumnie tablicy wyrażenia [
1
s 0,07 s1
] . Ponieważ
rozpatrywany przykład jest stosunkowo prostym przykładem nie powinno być problemu ze
znalezieniem takiego wyrażenia.
W przypadkach bardziej złożonych, kiedy nie udaje się nam znaleźć odpowiedniego wyrażenia
stosujemy zabieg rozkładu takiego wyrażenia na ułamki proste, przedstawiamy go więc jako sumę
„prostszych” wyrażeń, w tablicy znajdujemy te „prostsze” wyrażenia a wynik uzyskujemy jako
sumę oryginałów poszczególnych „prostszych” wyrażeń. Więcej szczegółów o toku
przedstawionego postępowania można znaleźć w pozycji [1], str.76.
Występujące w naszym przykładzie wyrażenie znajdujemy bez większego problemu w drugim
wierszu tablicy. Odczytujemy oryginał:
1−e
−
t
gdzie =
1
T
. Tak więc wzór (13) na
charakterystykę skokową w naszym przypadku przyjmie postać:
h t= L
−
1
[
k
u
Ts1
a
s
]=
a⋅k
u
1−e
−
t
T
=
3181,851−e
−
t
0,07
(14)
Dokonajmy odpowiedniej interpretacji otrzymanego wzoru. Przypomnijmy, że rozpatrywanym
obiektem jest silnik prądu stałego (rys. 3 i 4). Wielkością wyjściową jest prędkość obrotowa w
[obr/min] a wielkością wejściową – napięcie zasilające w [V]. Wzór (14) wyraża zmiany prędkości
obrotowej badanego silnika w czasie po podłączeniu go do napięcia 35 [V]. Silnik przed
podłączeniem do zasilania miał prędkość obrotową zerową (zerowe warunki początkowe). Należy
sprawdzić, czy po podstawieniu do (14) t=0 h(t) reprezentujące obroty będzie równe zero. Po
odpowiednio długim czasie (ok. 3-4 stałe czasowe) prędkość obrotowa silnika obcowzbudnego
(przy braku zmian jego obciążenia) ustali się na stałej wartości. Jakiej? Należy wyliczyć wartość
(14) przy t=∞ (stan ustalony). Tym sposobem określimy wartość początkową i końcową prędkości
obrotowej. Natomiast dla określenia przebiegu jej zmian konieczne jest policzenie wartości (14) dla
kilku wartości t z przedziału od 0 do (3-4)T. Najwygodniej wyniki tych obliczeń przedstawić w
odpowiedniej tabelce.
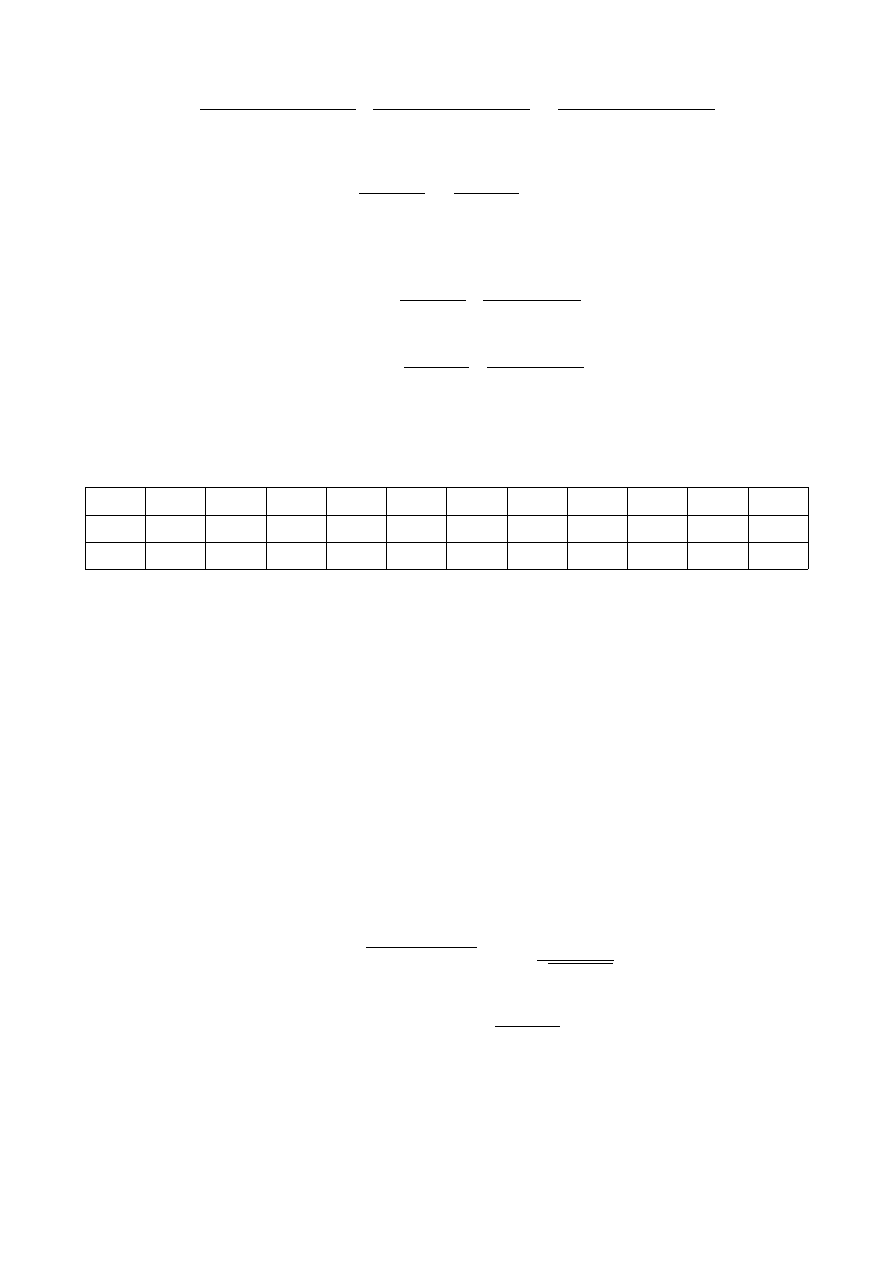
Tabela 1. Wybrane wartości h(t)
t[s]
0 0,001 0,002 0,003
0,01
0,01
0,02
0,05
0,1
0,5
∞
h(t)[obr/min] 0 45,13 89,62 133,48 219,35 423,57 790,76 1624,2 2419,31 3179,33 3181,85
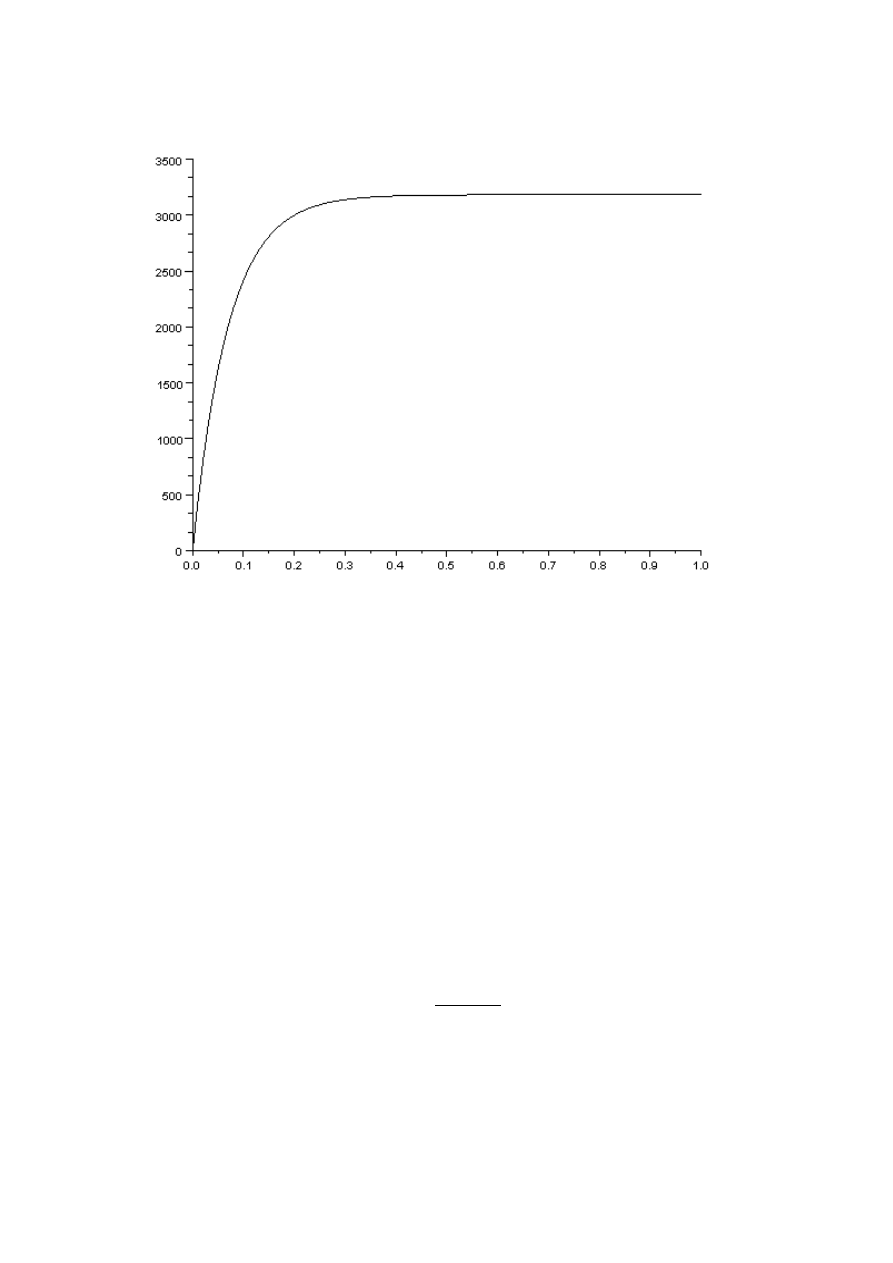
Dokładny wykres charakterystyki skokowej można uzyskać wykorzystując dowolny program
graficzny. W ramach ćwiczeń laboratoryjnych istnieje możliwość narysowania wykresu h(t) przy
pomocy programu MATLAB. Poniżej podane są instrukcje ogólnodostępnego programu SciLAB
pozwalające narysować wykres h(t) badanego silnika.
-->s=poly(0,'s');
-->sl=syslin('c',3181.85/(0.07*s+1));
-->instants=0:0.01:1;
-->y=csim("step",instants,sl);
-->plot2d(instants',y');
Po wykonaniu tych instrukcji w programie SciLAB otrzymamy wykres jak na rys. 6.
Krok V - Charakterystyki częstotliwościowe
W pkt. 5 „Tok postępowania” (str. 2) przytoczone są podstawowe pojęcia i wzory mające
zastosowanie w analizie częstotliwościowej. Więcej informacji można znaleźć w rozdziale 3
pozycji [1], str. 88. W ramach pracy kontrolnej należy rozpracować dwa rodzaje charakterystyk
częstotliwościowych: charakterystykę amplitudowo-fazową oraz charakterystyki logarytmiczne.
Charakterystyka amplitudowo-fazowa (a-f)
Dla narysowania charakterystyki a-f na płaszczyźnie fazowej konieczne jest rozdzielenie
transmitancji widmowej G(jω) na część rzeczywistą P(ω) i część urojoną Q(ω):
G j =P jQ
(15)
W rozpatrywanym silniku DC, którego transformata operatorowa ma postać określoną równaniem
(11), transmitancję widmową zapiszemy jako:
G j =
k
u
1 j T
(16)
W celu wydzielenia części rzeczywistej i urojonej z równania (16) pomnożymy jego licznik i
mianownik przez liczbę zespoloną, sprzężoną do liczby znajdującej się w mianowniku. Jak
pamiętamy, liczba sprzężona do danej liczby zespolonej to taka, która ma część rzeczywistą taką
samą a część urojoną z odwrotnym znakiem. Tak więc w naszym przypadku pomnożymy licznik i
mianownik równania (16) przez 1- jωT. Wykonamy kolejne przekształcenia i otrzymamy:
Rys. 6. Wykres charakterystyki skokowej silnika prądu stałego
G j =
k
u
1− j T
1 j T 1− j T
=
k
u
1 j T 1− j T
−
j
k
u
T
1 j T 1− j T
i dalej
G j =
k
u
1
2
T
2
−
j
k
u
T
1
2
T
2
=
P − jQ
Ostatecznie, dla potrzeb narysowania charakterystyki amplitudowo-fazowej, obliczymy części
rzeczywistą i urojoną transmitancji:
P =
k
u
1
2
T
2
=
90,91
10,0049
2
(17)
Q=
−
k
u
T
1
2
T
2
=
−
6,3637
10,0049
2
(18)
W celu narysowania ch-ki a-f wygodnie jest wykonać obliczenia
części rzeczywistej P(ω) i części
urojonej Q(ω) dla ω zmieniającej się w zakresie od 0 do ∞.
Wyniki tych obliczeń dla wybranych wartości ω zamieścimy w tabeli 2.
Tabela 2. Wyniki obliczeń charakterystyki amplitudowo-fazowej
ω
0
0,01
0,1
0,25
0,5
1
5
10
20
100
∞
P(ω)
90,91
90,9
90,9
90,88
90,8
90.46
81
61,01
30,71
1,82
0
Q(ω)
0
-0,06
-0,06
-1,59
-3,18
-6,33
-28,35 -42,71
-43
-12,73
0
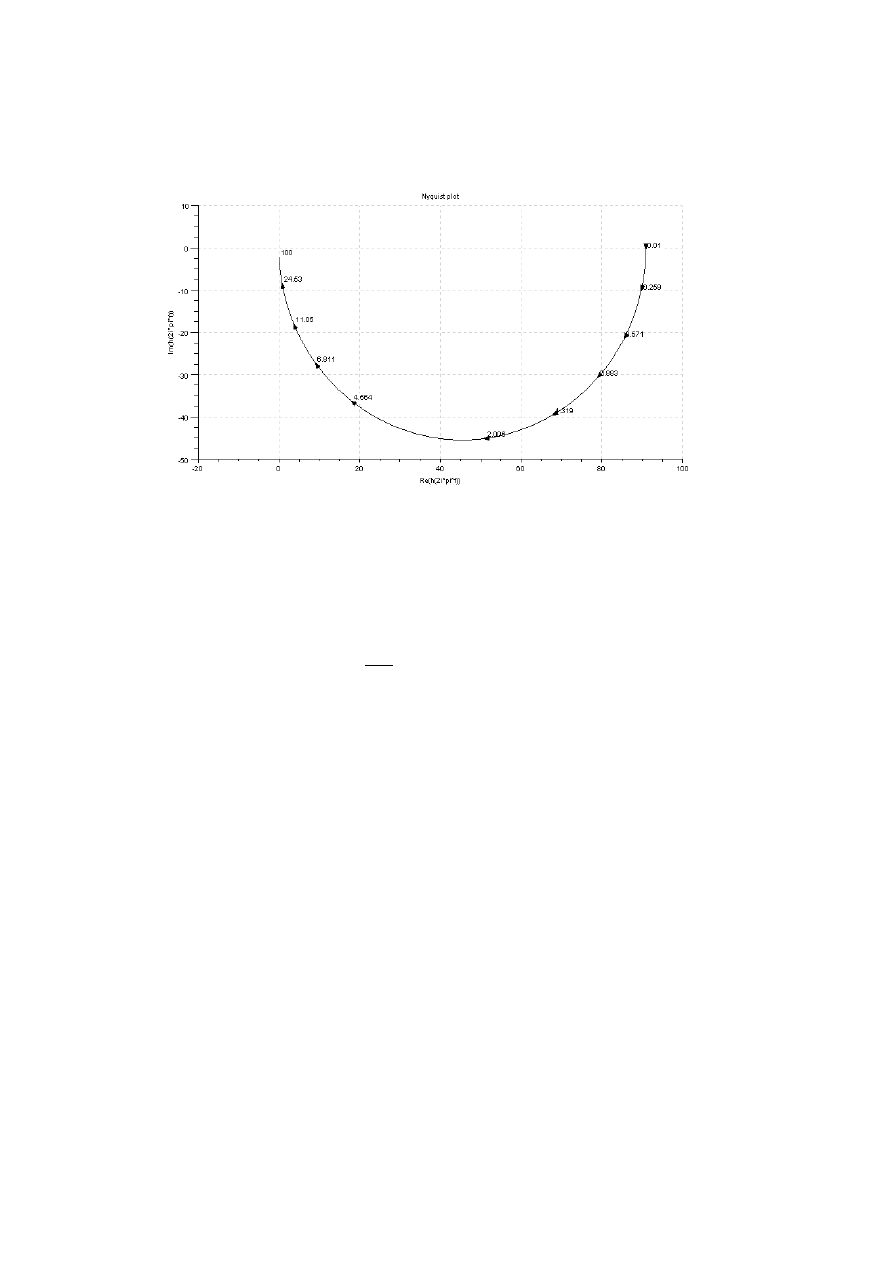
Pełny wykres charakterystyki można również otrzymać korzystając z odpowiednich graficznych programów
komputerowych. W ramach zajęć laboratoryjnych była możliwość wykorzystania do tego celu programu
MATLAB. Poniżej podany jest zestaw instrukcji pozwalających narysować charakterystykę amplitudowo-
fazową (tzw. ch-kę Nyquista) przy pomocy programu SciLAB.
-->s=poly(0,'s');
-->h=syslin('c',90.91/(0.07*s+1));
-->nyquist(h,0.01,100);
Sam wykres otrzymany w wyniku realizacji zaprezentowanych instrukcji przedstawiony jest na rys. 7.
Charakterystyki logarytmicznej
Analizujemy dwie charakterystyki logarytmiczne: amplitudową i fazową. Charakterystykę
amplitudową wyznaczymy z zależności:
L =20 log
P
2
Q
2
=
20log
k
u
1T
2
2
(19)
którą najwygodniej zapisać w postaci:
L =20 log k
u
−
20log
1T
2
2
(20)
Wykres L(ω) można uprościć, pomijając we wzorze (20) dla ω<1/T składnik T
2
2
, a dla
ω>1/T składnik 1 pod pierwiastkiem. Otrzymamy wówczas tzw. asymptotyczną charakterystykę
amplitudową:
dla ω<1/T
L =20 log k
u
,
(21)
dla ω>1/T L =20 log k
u
−
20log T
(22)
Pulsacja (częstotliwość kątowa) ω=1/T nazywa się pulsacją sprzęgającą i oznacza się ją
symbolem
s
lub czasami
0
.
Logarytmiczną charakterystykę fazową wyznaczamy z zależności:
=
arctg Q
P
=
arctg −T =−arctg T
(23)
Bardziej szczegółowe informacje na omawiane tematy można znaleźć w [1], str.100.
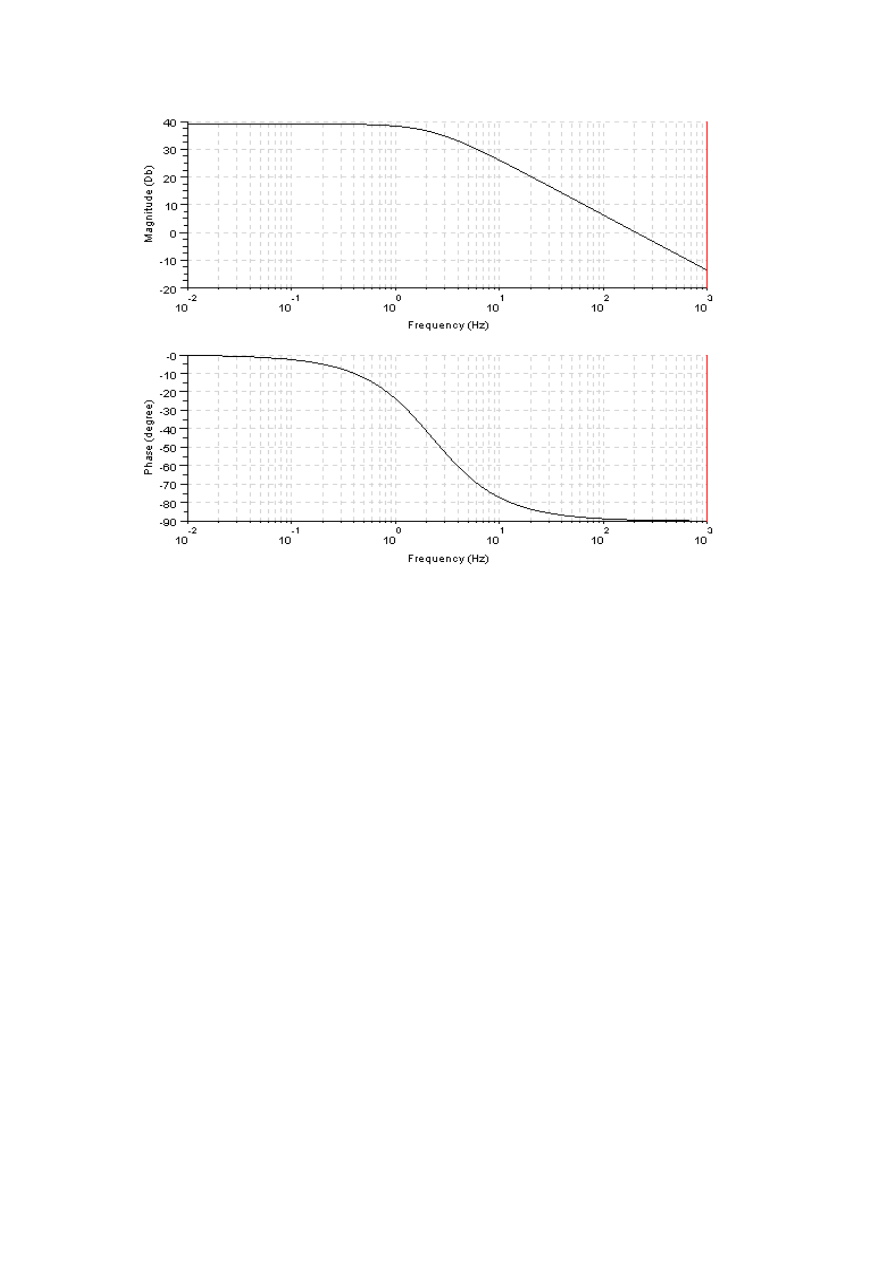
Na rys. 8 przedstawione zostały wykresy charakterystyki amplitudowej i fazowej uzyskane przy
pomocy programu SciLAB. Dla ich otrzymania wystarczy w programie SciLAB następujęce
instrukcje:
-->s=poly(0,'s');
-->h=syslin('c',90.91/(0.07*s+1));
-->bode(h,0.01,100);
W ramach ćwiczeń laboratoryjnych przedstawiane było wykorzystanie programu MATLAB do takich zadań.
W pracy kontrolnej w przypadku rysowania dokładnych charakterystyk logarytmicznych z wykorzystaniem
programu komputerowego, na otrzymany wykres charakterystyki amplitudowej proszę nanieść przybliżoną
charakterystykę (patrz: asymptotyczna charakterystyka amplitudowa – wzór (21) i (22)).
Rys. 7. Wykres charakterystyki amplitudowo-fazowej silnika DC uzyskany przy pomocy
programu SciLAB
Literatura
1. Wykłady z automatyki dla mechaników, M. Chłędowski, Oficyna Wydawnicza Politechniki
Rzeszowskiej, Rzeszów 2003
2. Podstawy automatyki w ćwiczeniach i zadaniach, M. Chłędowski, J. Pieniążek, Oficyna
Wydawnicza Politechniki Rzeszowskiej, Rzeszów 2009
Rys. 8. Charakterystyki logarytmiczne silnika CD
Wyszukiwarka
Podobne podstrony:
JAVASCRIPT Kod kodu testu z JavaScript do pracy kontrolnej
JAVASCRIPT Kod kodu testu z JavaScript do pracy kontrolnej
materialy metodyczne do ii kolo Nieznany
Swiadectwa, dokumentacja rozwoju zawodowego nauczyciela stażysty, Umiejętność prowadzenia zajęć, Kon
FRAGME~3, dokumentacja rozwoju zawodowego nauczyciela stażysty, Umiejętność prowadzenia zajęć, Konsp
Krzyzowka, dokumentacja rozwoju zawodowego nauczyciela stażysty, Umiejętność prowadzenia zajęć, Kons
WYPOWI~1, dokumentacja rozwoju zawodowego nauczyciela stażysty, Umiejętność prowadzenia zajęć, Konsp
MODLIT~1, dokumentacja rozwoju zawodowego nauczyciela stażysty, Umiejętność prowadzenia zajęć, Konsp
DNO miednicy masaż., Medyczne Studium Zawodowe ul. Szamarzewskiego, Sterylizacja medyczna, TSM, sem.
rozkład materiału z przysposobienia do pracy
FRAGME~2, dokumentacja rozwoju zawodowego nauczyciela stażysty, Umiejętność prowadzenia zajęć, Konsp
Metaplan, dokumentacja rozwoju zawodowego nauczyciela stażysty, Umiejętność prowadzenia zajęć, Konsp
EXCEL SEM II - Zadania do pracy kontrolnej nr 1, Technikum Informatyczne, 3.Oprogramowanie Biurowe
JAVASCRIPT Kod kodu testu z JavaScript do pracy kontrolnej
więcej podobnych podstron