Wyznaczenie przyspieszenia ziemskiego za pomocą
wahadła różnicowego.
Ćw.23
Cel ćwiczenia
1. Poznanie praw rządzących ruchami drgań harmonicznych.
2. Drgania harmoniczne quasi-sprężyste. Poznanie wzorów na okresy drgań wahadła prostego i
różnicowego dla wahań izochronicznych.
3. Przyspieszenie ziemskie. Zależność przyspieszenia ziemskiego od szerokości geograficznej Ziemi.
4. Wyznaczenie przyspieszenia ziemskiego za pomocą wahadła różnicowego.
Zakres obowiązującego materiału teoretycznego
Równanie ruchu harmonicznego i jego rozwiązanie. Wykres funkcji x = f(t) dla ruchu harmonicznego.
Wyprowadzenie wzorów na okres wahań wahadła matematycznego i różnicowego. Przyspieszenie ziemskie
g oraz jego zależność od wysokości i szerokości geograficznej.
WPROWADZENIE
Ruch drgający
Ruchem drgającym nazywamy każdy ruch lub zmianę stanu, które charakteryzuje powtarzalność w czasie
wartości wielkości fizycznych, określających ten ruch lub stan. Jeśli wartości wielkości fizycznych
zmieniające się podczas drgań, powtarzają się w równych odstępach czasu, to taki ruch drgający nazywamy
okresowym. Najprostszym rodzajem drgań okresowych są tzw. drgania harmoniczne. Mówimy, że wielkość
fizyczna x wykonuje drgania harmoniczne, jeśli jej zależność od czasu opisana jest przez funkcje
harmoniczne sinusa i cosinusa kątów:
(
)
δ
+
ω
=
t
sin
A
x
gdzie A,
ω, δ, ϕ, są wielkościami stałymi w danym ruchu.
Jako przykład takich drgań rozpatrzymy ruch punktu materialnego pod działaniem siły sprężystości. Siła
sprężystości jest proporcjonalna do przemieszczenia
xr
ciała z położenia równowagi oraz jest przeciwnie niż
to przemieszczenie zwrócona:
( )
→
→
−
=
x
k
x
F
(1)
gdzie k jest pewną stałą zwaną współczynnikiem sprężystości (stałą sprężystości). Siła sprężystości jest siłą
przywracająca układowi równowagę, gdyż jest ona zawsze skierowana w stronę początkowego położenia.
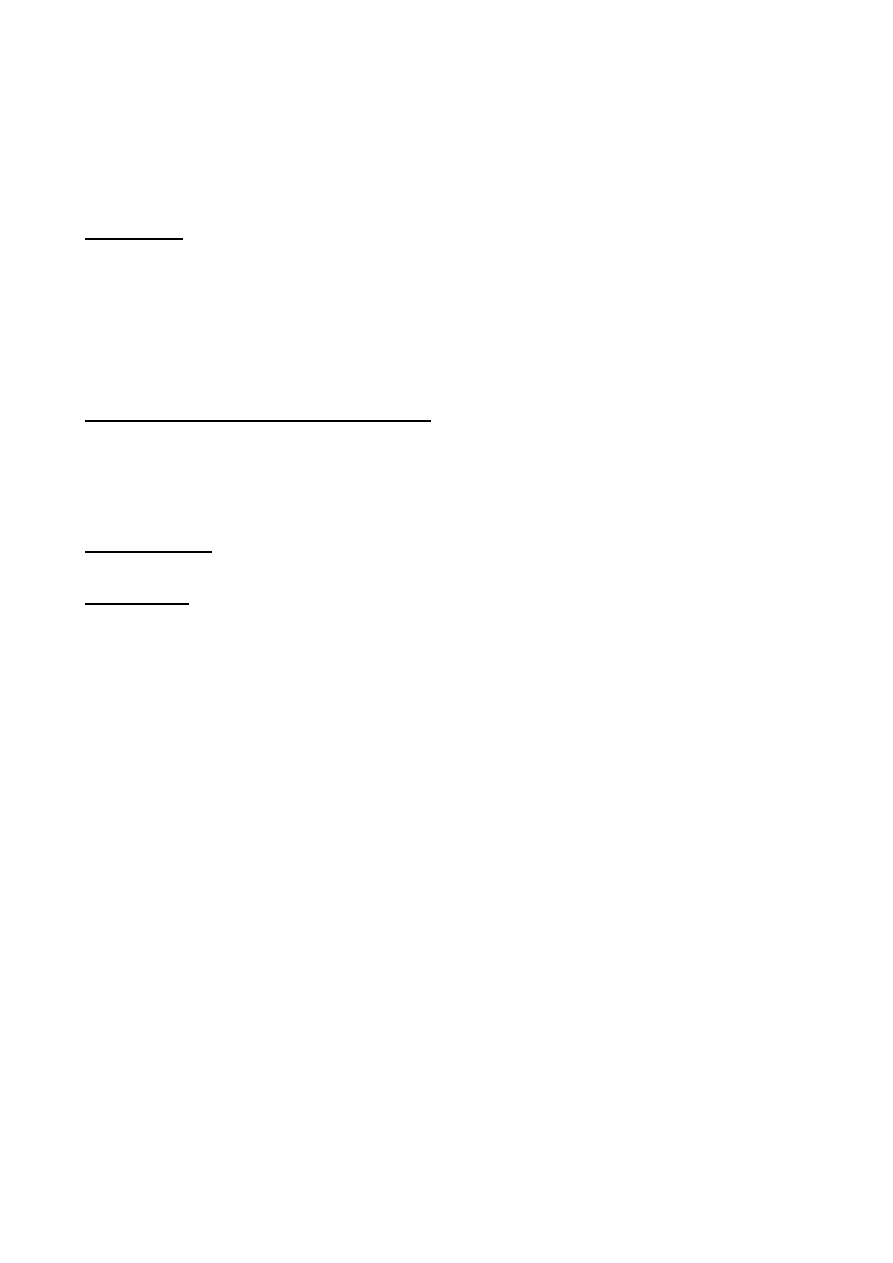
Siłę taką realizuje idealna sprężyna ściśnięta lub rozciągnięta o długość x. Rozpatrzmy więc ruch ciała o
masie m przyczepionego do idealnej sprężyny i mogącego poruszać się po doskonale gładkiej poziomej
powierzchni (rys. 1). Masę sprężyny w porównaniu z masą ciała możemy zaniedbać.
1
Rys.1. Różne stany ruchu oscylatora harmonicznego.
Według II zasady Newtona:
→
→
−
=
x
k
a
m
Ruch odbywa się wzdłuż jednej prostej, więc równanie ruchu możemy zapisać bezpośrednio w postaci
skalarnej:
x
k
a
m
−
=
Można je również napisać w postaci różniczkowej
0
kx
dt
x
d
m
2
2
=
+
(2)
Wielkości k i m są dodatnie, wobec tego możemy przyjąć, że ich stosunek jest równy kwadratowi pewnej
wielkości rzeczywistej
ω i oznaczyć:
2
m
k
ω
=
Mamy wtedy:
0
x
dt
x
d
2
2
2
=
ω
+
Równanie to określa związek między przemieszczeniem ciała, a jego drugą pochodną względem czasu. Z
tego ostatniego powodu równanie nazywamy różniczkowym drugiego rzędu (równaniem różniczkowym
drugiego rzędu). Rozwiązaniem tego równania nazywamy każdą funkcję x(t), która po wstawieniu do
równania spełnia je. Przez bezpośrednie przeliczenia można sprawdzić, że takimi funkcjami są:
( )
(
)
δ
+
ω
=
t
sin
A
t
x
(3)
( )
(
)
ϕ
+
ω
=
t
cos
A
t
x
(4)
gdzie A,
δ, ϕ, ω są wielkościami stałymi.
2
W teorii równań różniczkowych dowodzi się, że poprzez odpowiedni dobór stałych A i
δ we wzorze (3) lub A
oraz
ϕ, we wzorze (4) możemy otrzymać wszystkie rozwiązania badanego równania. Innych rozwiązań nie
ma. Jak widać, drgania które zachodzą pod działaniem siły sprężystości są drganiami harmonicznymi.
Wyrażenia (3) i (4) mogą być używane równoważnie, ponieważ dla
ϕ = δ−π/2 mamy:
(
)
(
)
ϕ
+
ω
=
δ
+
ω
t
cos
t
sin
Wartości liczbowe stałych
δ i ϕ zależą od wyboru chwili, w której zaczynamy liczyć czas. Jeśli przyjmiemy
t = 0 przy x = 0 to
δ = 0 oraz x = A sin ωt, jeśli zaś przyjmiemy t = 0 przy x = A to ϕ = 0 oraz x = A cosωt.
Jak widać, możliwy jest dobór takiej chwili początkowej aby funkcja opisująca wychylenie miała jak
najprostszą postać. Stała A równa największemu wychyleniu z położenia równowagi jest amplitudą ruchu.
Wyrażenie (
ωt+δ) lub (ωt+ϕ) określa wychylenie x w danej chwili t i nazywamy je fazą drgań. W chwili, kiedy
zaczynamy liczyć czas (t=0) faza drgań równa się odpowiednio
δ lub ϕ, dlatego wielkość δ(ϕ), nazywamy
fazą początkową drgań. Aby znaleźć sens fizyczny stałej
ω porównujemy wartości wychyleń w chwili t oraz
w chwili o czasie 2
π/ω późniejszym:
( )
(
)
δ
+
ω
=
t
sin
A
t
x
(
)
(
)
[
]
(
)
(
)
δ
+
ω
=
δ
+
π
+
ω
=
δ
+
ω
π
+
ω
=
ω
π
+
t
sin
A
2
t
sin
A
/
2
t
sin
A
/
2
t
x
r
r
Można sprawdzić, że po czasie 2
π/ω powtarzają się także wartości
v
i
a
, a więc jest on najmniejszym
odstępem czasu, po którym powtarzają się wartości wszystkich wielkości fizycznych charakteryzujących
drgania i nazywa się on okresem drgań T:
ω
π
=
2
T
Częstość drgań
ν=1/T, zatem:
πν
=
ω 2
Wobec tego stała
ω jest co do wartości równa liczbie drgań w ciągu 2π sekund. Nazywamy ją częstością
kątową albo kołową.
Zgodnie z wprowadzonym oznaczeniem
ω
2
=k/m, okres drgań jest równy:
k
m
2
T
π
=
(5)
Jak widać okres drgań zależny jest tylko od masy m drgającego punktu materialnego i stałej sprężystości k,
nie zależy natomiast od amplitudy ruchu. Dla danego układu drgającego okres drgań, amplituda oraz stała
fazowa pozostają stałe tak długo, jak długo inne siły nie podziałają na układ.
Omówiliśmy ruch punktu materialnego pod wpływem siły sprężystości wywołanej odkształceniem ciała.
Znane są też takie siły, nie związane z odkształceniem ciała, które powodują jego ruch wokół położenia
równowagi z zachowaniem proporcjonalności do wychylenia i zwrotu przeciwnego do zwrotu tego
wychylenia. Siły te nazywamy quasi-sprężystymi.
W ogólnej postaci możemy je zapisać następująco :
( )
Az
z
F
−
=
(6)
gdzie A oznacza stały współczynnik dodatni natomiast z - dowolną współrzędną opisującą położenie ciała.
3
Jeśli dla danego układu równanie ruchu wywołanego siłą quasi-sprężystą (porównaj z równaniem 2) będzie
miało postać:
0
Az
dt
z
d
B
2
2
=
+
(7)
gdzie B jest stałą dodatnią określającą cechy fizyczne układu, to rozumując dokładnie tak samo jak w
przypadku wahadła sprężynowego dochodzimy do wniosku, że równanie to opisuje ruch harmoniczny:
β
+
=
0
t
B
A
sin
Z
z
β
+
=
1
t
B
A
cos
Z
z
o okresie drgań równym:
A
B
2
T
π
=
(8)
Wahadło proste (matematyczne)
Wahadłem prostym nazywamy niewielką, ciężką kulkę zawieszoną na cienkim drucie lub nici o długości
wielokrotnie większej od wymiarów kulki. Wahadło takie należy uważać za praktyczną realizację wahadła
matematycznego definiowanego jako punkt materialny zawieszony na nieważkiej i nierozciągliwej nici.
Jeśli wahadło odchylimy od położenia równowagi tak, aby nić tworzyła z pionem niewielki kąt
α rys.2, a
następnie puścimy je swobodnie to zacznie się wahać w płaszczyźnie pionowej pod wpływem własnego
ciężaru.
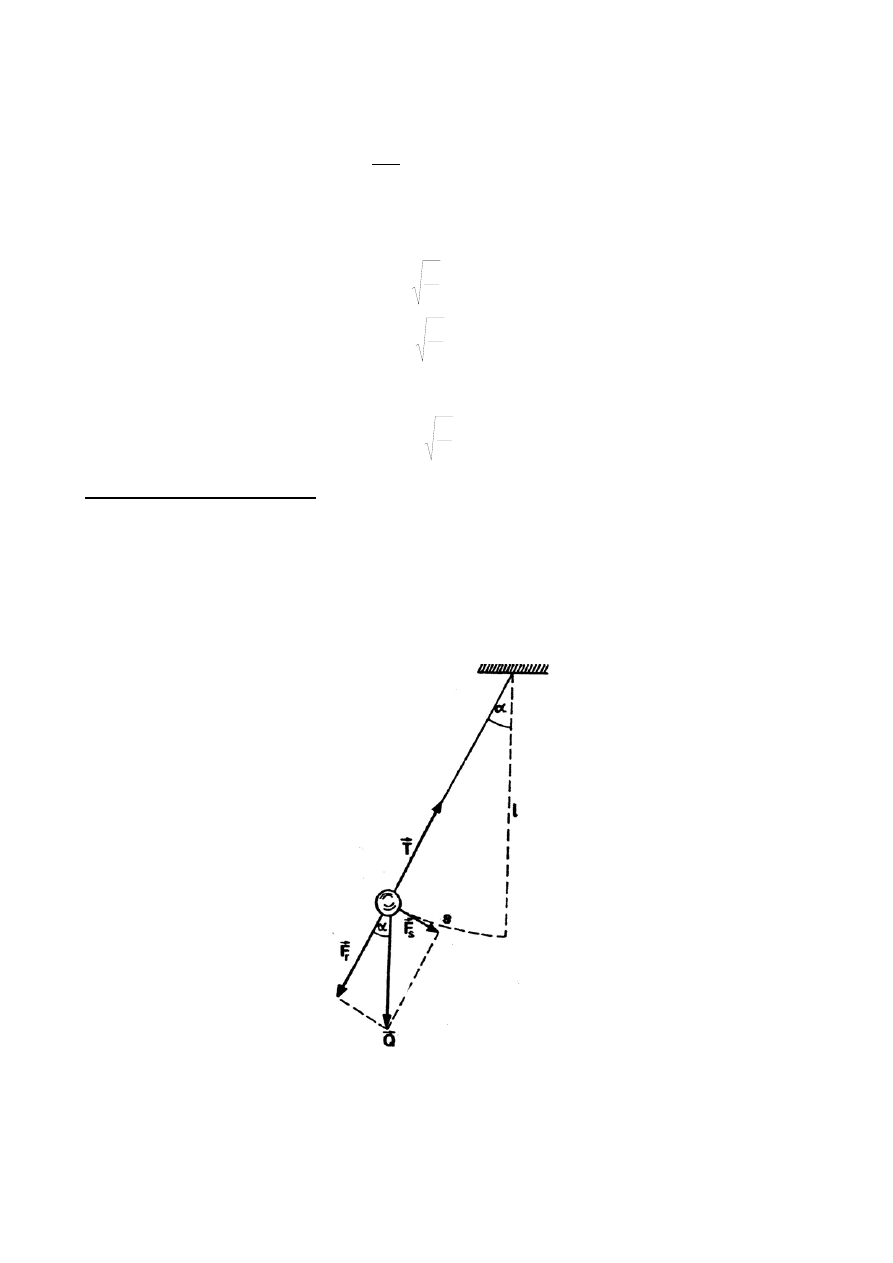
Rys.2. Siły działające na wahadło proste.
4
Oznaczmy symbolem m masę kulki, symbolem l - długość nici. Na masę m działa siła ciężkości
Q
r
i siła
napięcia nici
T
r
. Siłę ciężkości rozkładamy na dwie składowe :
F
s
r
- składową styczną do toru kulki i
F
r
r
-
składową radialną, skierowaną wzdłuż nici wahadła. Składowa
r
F
r
równoważy napięcie nici
T
r
,
niezrównoważona składowa
jest siłą przywracającą równowagę układowi - przemieszczającą masę m
do położenia równowagi. Uwzględniając kierunki siły i wychylenia możemy napisać:
s
F
r
α
−
=
α
−
=
sin
mg
sin
Q
F
s
Dla małych kątów odchylenia można przyjąć, że:
α
=
α
sin
a ponieważ długość łuku po którym porusza się wahadło wynosi S = l
α, zachodzi wtedy zależność:
s
l
mg
F
s
−
=
Wyrażenie jest wielkością stałą. Wobec tego przy niewielkich wychyleniach siłę kierującą wahadło do
położenia równowagi możemy uważać za quasi-sprężystą (porównaj wzór (6)), a ruch wahadła - za ruch
harmoniczny. Równanie ruchu napiszemy w postaci:
s
l
mg
ma
−
=
lub
0
s
l
mg
dt
s
d
2
2
=
+
m
Porównując ostatnie równanie z (7) i korzystając ze wzoru (8) otrzymujemy:
g
l
2
T
π
=
(9)
Ścisły wzór na okres drgań dla dowolnego
α ma postać :
+
α
⋅
⋅
+
α
+
π
=
...
2
sin
4
2
3
1
2
sin
2
1
1
g
l
2
T
4
2
2
2
Można więc z dowolną dokładnością wyznaczyć T, urywając sumowanie nieskończonego szeregu na
odpowiednim wyrazie. Dla
α = 5
o
, opuszczając wszystkie wyrazy w nawiasie oprócz jedynki, popełniamy
błąd względny wielkości około 0.2%. Praktycznie więc dla kątów 5
o
- 6
o
, korzystamy ze wzoru (9). Dla takich
wychyleń okres wahań nie zależy od ich amplitudy - wahania są izochroniczne.
Izochronizm wahadła pozwala na dokładne wyznaczenie okresu drgań. Wskutek oporów ruchu amplituda
drgań maleje, ponieważ jednak okres drgań pozostaje niezmienny, możemy - celem zmniejszenia błędu
pomiarowego - zmierzyć czas kilkudziesięciu wahnięć i dzieląc go przez ich liczbę obliczyć okres.
Wahadło proste jest więc wygodnym narzędziem do pomiaru przyspieszenia ziemskiego g. Przekształcając
wzór (9) otrzymujemy:
l
T
4
g
2
2
π
=
(10)
Wartości przyspieszenia ziemskiego obliczamy na podstawie zależności (10) wyznaczając eksperymentalnie
l i T.
5
Przyspieszenie ziemskie
Przyspieszeniem ziemskim g nazywamy przyspieszenie, które uzyskują ciała pod wpływem siły ciężkości P
(ciężaru) w pobliżu powierzchni Ziemi.
mg
P
=
(11)
gdzie m - masa ciała. Jednak na ciała znajdujące się na powierzchni lub w pobliżu powierzchni Ziemi oprócz
siły grawitacyjnej:
o
o
mg
P
=
(12)
działa siła bezwładności F związana z ruchem obrotowym Ziemi - siła odśrodkowa:
r
m
F
2
ω
=
(13)
gdzie
ω
jest prędkością kątową Ziemi zaś r odległością ciała od jej osi obrotu.
Rys. 3. Siły działające na ciało znajdujące się na powierzchni Ziemi o szerokości geograficznej
ϕ.
Jeśli przyjąć, że Ziemia jest kulą o promieniu R (rys.3) to r = R cos
ϕ , gdzie ϕ - szerokość geograficzna.
Wówczas:
ϕ
ω
=
cos
R
m
F
2
(14)
Dzieląc wyrażenie (14) przez (12) otrzymujemy:
ϕ
ω
=
cos
g
R
P
F
o
2
o
lub oznaczając:
A
g
R
o
2
=
ω
(15)
ϕ
=
cos
A
P
F
o
(16)
6
Z trójkąta KLM na rys.3 widać, że zgodnie z twierdzeniem cosinusów:
ϕ
−
+
=
cos
F
P
2
F
P
P
o
2
2
o
2
Podstawiając do powyższej zależności F z wzoru (6) otrzymujemy:
(
)
[
]
ϕ
−
+
=
2
2
o
2
cos
2
A
A
1
P
P
(17)
Ponieważ A
<<2, możemy czynnik A-2 w powyższej zależności zastąpić czynnikiem -2. Wówczas z równania
(17) otrzymujemy:
ϕ
−
=
2
o
cos
A
2
1
P
P
(18)
Rozwijając powyższe wyrażenie w szereg Taylora względem 2Acos
2
ϕ i ograniczając się do dwu pierwszych
członów rozwinięcia (można tak uczynić ze względu na to, że 2Acos
2
ϕ << 1), otrzymujemy:
(
)
ϕ
−
=
2
o
cos
A
1
P
P
(19)
lub uwzględniając zależności (11) i (12):
(
)
ϕ
−
=
2
o
cos
A
1
g
g
(20)
Wzór (20) wskazuje, że zgodnie z oczekiwaniem przyspieszenie ziemskie osiąga wartość największą na
biegunach (
ϕ =
π
/2), a najmniejszą na równiku (
ϕ = 0).
Stałą A występującą we wzorach od (16) do (20) możemy wyznaczyć podstawiając do (15) znane wartości
R,
ω i g
o
, A=1/289. Widać, że założenie uczynione przy wyprowadzeniu zależności (18) oraz (19) są
spełnione. W rzeczywistości Ziemia nie jest kulą i jej średnica biegunowa jest mniejsza od równikowej.
Uwzględnienie tego faktu w odpowiednich rachunkach nie jest łatwe. Prowadzi ono do nieco mniejszej
wartości stałej A (A=1/166).
Wyznaczenie przyspieszenia ziemskiego za pomocą wahadła różnicowego
Wartość przyspieszenia ziemskiego wyznaczona przy pomocy wahadła prostego obarczona jest dość
znacznym błędem. Spowodowany on jest głównie błędem pomiaru długości wahadła. Błąd ten można
zmniejszyć stosując tzw. wahadło różnicowe.
Wahadło różnicowe różni się od wahadła prostego tylko tym, że długość nici, a więc i długość wahadła
można łatwo i precyzyjnie zmieniać. Najczęściej uzyskuje się to przez zastosowanie odpowiednio
zawieszonego wahadła.
Przypuśćmy, że długość wahadła wynosi l
1
. Wtedy okres drgań będzie równy:
g
l
2
T
1
1
π
=
Skróćmy nić wahadła tak, by teraz jego długość wynosiła l
2
, okres drgań wyniesie wtedy:
g
l
2
T
2
2
π
=
7
Podnieśmy oba wyrażenia do kwadratu i odejmijmy je stronami:
(
)
2
1
2
2
2
2
1
l
l
g
4
T
T
−
π
=
−
Wprowadzając oznaczenie
∆l = l
1
-l
2
oraz przekształcając powyższy wzór, otrzymamy:
2
2
2
1
2
T
T
l
4
g
−
∆
π
=
(21)
Jak widać do wyznaczenia przyspieszenia ziemskiego potrzebna jest znajomość okresów drgań wahadeł
oraz różnica ich długości. Różnicę
∆l można zmierzyć bezpośrednio, a więc do jej wyznaczenia nie jest
konieczna znajomość l
1
i l
2
.
Wahadło różnicowe wykorzystane w ćwiczeniu
Przyrząd umożliwiający zawieszenie i regulowanie długości wahadła przedstawia rys.4:
Rys.4. Schemat wahadła różnicowego z uchwytem do zawieszenia i regulowania długości wahadła.
Na górnej belce w uchwycie U umocowana jest nić o długości ok.1.5m, przewleczona przez szczelinę Sz.
Na drugim końcu nici zawieszona jest metalowa kulka. Krawędź szczeliny Sz stanowi naturalną oś drgań
wahadła. Położenie szczeliny wraz z dolną belką możemy dowolnie zmieniać przesuwając w górę lub w dół
uchwyt na statywie. Do belki ze szczeliną przymocowana jest skala milimetrowa W. Na wskaźniku skali W
odczytujemy liczbę podziałek (S
i
) odpowiadającej położeniu dolnej płaszczyzny górnej belki.
Wykonanie ćwiczenia
1. Umocowujemy dolną belkę tak aby nić była możliwie najdłuższa. Odczytujemy położenie wskaźnika W
skali milimetrowej (S
i
). Wprowadzamy wahadło w ruch, odchylając je o 5
o
- 6
o
tak, aby wahania zachodziły w
jednej płaszczyźnie i mierzymy czas t
i
trwania n wahnięć (około 100). Okres drgań obliczmy ze wzoru:
n
t
T
i
i
=
8
Wyniki zapisujemy w tabeli pomiarowej.
2. Następnie luzujemy śrubę pokrętła uchwytu mocującego nitkę i przesuwamy go w dół o ok. 6 cm,
odczytujemy położenie wskaźnika W skali milimetrowej odpowiadającej położeniu dolnej płaszczyzny górnej
belki. Ponownie wprowadzamy wahadło w drganie i mierzymy czas trwania takiej samej liczby wahnięć jak
przy pomiarze poprzednim.
3. Pomiary powtarzamy dla 5 różnych długości wahadła.
Wszystkie wyniki pomiarów wpisujemy do tabeli:
Lp.
S
i
n
t
i
T
i
1
2
3
4
5
4. Następnie dla 10 przypadków (wszystkie możliwe kombinacje wyników z zastrzeżeniem, że S
1
>S
2
)
obliczamy wartości przyspieszenia ziemskiego. Otrzymane wartości oraz wartość średnią
g
wpisujemy do
tabeli:
S
1
S
2
∆l
T
1
T
2
g
g
1-2
1-3
1-4
1-5
2-3
2-4
2-5
3-4
3-5
4-5
Bezwzględna wartość S
1
-S
2
równa się zmianie
∆l długości wahadła, którą wraz z wyznaczonym T
1
i T
2
podstawiamy do wzoru (21) dla obliczenia wartości przyspieszenia ziemskiego g.
5. Obliczamy błąd bezwzględny pomiaru przyspieszenia ziemskiego
g
∆
metodą Studenta–Fishera
zakładając poziom istotności
α = 0.05 zgodnie z instrukcją 17.
Podajemy oszacowanie granic wyznaczonej wielkości przyspieszenia ziemskiego w postaci:
g
g
g
∆
±
=
9
Opracowanie sprawozdania
Sprawozdania powinno między innymi zawierać:
-
wstęp teoretyczny z podkreśleniem celu i zakresu wykonanych pomiarów;
-
tabele pomiarowe;
-
wyniki obliczeń zestawione w tabeli;
-
obliczenia błędu i oszacowanie granic wyników;
-
wyniki końcowe podane w postaci:
g
g
g
∆
±
=
-
porównanie uzyskanej wartości z wartością teoretyczną;
-
wnioski.
10
Document Outline
- Cel ćwiczenia
- Zakres obowiązującego materiału teoretycznego
- WPROWADZENIE
- Przyspieszenie ziemskie
- Wyznaczenie przyspieszenia ziemskiego za pomocą wahadła różnic
- Wahadło różnicowe wykorzystane w ćwiczeniu
- Wykonanie ćwiczenia
- 4. Następnie dla 10 przypadków \(wszystkie możliwe kombinacje
Wyszukiwarka
Podobne podstrony:
fiz lab 10 id 173416 Nieznany
fiz lab 09 id 173414 Nieznany
fiz skrypty lab rigidbody id 69 Nieznany
CCNA4 lab 3 3 2 pl id 109125 Nieznany
Lab nr 3 id 258529 Nieznany
CCNA4 lab 4 3 7 pl id 109128 Nieznany
lab 04 id 257526 Nieznany
bd lab 04 id 81967 Nieznany (2)
CCNA4 lab 5 2 2 pl id 109130 Nieznany
lab fizycz id 258412 Nieznany
PMK lab potoczny id 363423 Nieznany
Lab 3 WDAC id 257910 Nieznany
FIZ GRUPA E POMARANCZOWA id 173 Nieznany
BP20122013 lab 1n id 92525 Nieznany
CCNA4 lab 1 1 6 pl id 109122 Nieznany
3 endoprotezy lab IMIR id 3308 Nieznany
23 id 29958 Nieznany
Lab 4 Tablice id 258003 Nieznany
więcej podobnych podstron