
1
Modelowanie niepewności przy użyciu przybliżonych miar
prawdopodobieństwa
dr inż. Mirosław Kwiesielewicz
Wydział Elektrotechniki i Automatyki
Katedra Automatyki
Gdańsk, listopad 1998

2
1.
Wprowadzenie
Tradycyjnie do modelowania niepewności stosowany był aparat probabilistyczny. Opis
probabilistyczny stosowany może być jednak w przypadkach, gdy występuje wystarczająca
liczba danych, czyli używając języka statystyki, próba dobrze reprezentująca badaną populację.
W wielu praktycznych sytuacjach warunek ten nie może być spełniony. Często dane dotyczące
rozważanego zagadnienia dostarczane są przez ekspertów, zarówno w zakresie wyboru
odpowiedniego rozkładu prawdopodobieństwa, jak i jego parametrów. Stąd stosowanie opisu
probabilistycznego, opartego o niewystarczającą liczbę danych oraz często występujący
arbitralny wybór rozkładów prawdopodobieństwa, jak również czasochłonne obliczenia z
wykorzystaniem aparatu probabilistycznego może w wielu przypadkach prowadzić do
niewiarygodnych wyników.
W praktyce dane eksperymentalne są nie tylko losowe, ale i niedokładne. Często wyrażane
są w postaci subiektywnej oceny ekspertów. W niniejszym opracowaniu przedstawia się
alternatywne w stosunku do prawdopodobieństwa metody reprezentacji niepewności, które poza
losowością uwzględniają niedokładność danych, którymi się dysponuje.
Innym praktycznym problemem jest występowanie różnego typu danych. Część z nich
może mieć np. charakter losowy, a część charakter losowy, ale ze względu na zbyt małą liczbę
danych eksperymentalnych można stwierdzić, że dane te są niedokładne. W takim przypadku
celowe byłoby zastosowanie metodyki obliczeniowej, pozwalającej na operowaniu różnymi
typami danych. Metodyka taka może być zaczerpnięta z teorii faktów wprowadzonej przez
Shafera (1976) opierająca się na koncepcji niedokładnego prawdopodobieństwa i obejmująca
opis probabilistyczny i posybilistyczny. Ten ostatni, przy pewnych założeniach może być
przekształcony na zbiór rozmyty i odwrotnie. Z kolei istnieją metody transformacji z opisu
probabilistycznego na posybilistyczny i odwrotnie. W związku z tym koncepcja Shafera wydaje
się bardzo atrakcyjna w sytuacji występowania różnych typów niepewności.
2.
Metody reprezentacji niepewności
Jak wspomniano wcześniej, teoria faktów wprowadzona przez Shafera (1976) pozwala na
operowanie różnymi typami niepewności, włączając opis probabilistyczny i posybilistyczny.
Z kolei koncepcja rozkładu możliwości wprowadzona przez Zadeha (1978) utożsamia funkcję
rozkładu możliwości z funkcją charakterystyczną zbioru rozmytego. W związku z tym na
gruncie teorii faktów omówione zostaną trzy podstawowe rodzaje reprezentacji niepewności:
teoria zbiorów rozmytych, teoria prawdopodobieństwa oraz teoria możliwości.
2.1 Teoria zbiorów rozmytych
Teoria zbiorów rozmytych wyrosła z klasycznej teorii zbiorów. W odróżnieniu od zbioru
klasycznego granica zbioru rozmytego nie jest określona precyzyjnie, natomiast występuje
płynne przejście od całkowitej nieprzynależności elementu do zbioru, poprzez jego częściowa
przynależność, aż do całkowitej przynależności. To płynne przejście określone jest poprzez
funkcję przynależności
A
µ
, która może przyjmować wartości z przedziału [0,1]:
[ ]
1
,
0
:
→
X
A
µ
,
3
gdzie X oznacza klasyczny zbiór elementów, natomiast A jest etykietą przyporządkowaną
zbiorowi rozmytemu, zdefiniowanemu poprzez tą funkcję. Wartość funkcji
( )
x
A
µ
wyraża
stopień przynależności elementu x z X do zbioru rozmytego A.
Zbiory rozmyte mogą służyć do opisu na przykład takich pojęć lingwistycznych jak
“mały”, “średni”, “duży”, “bardzo duży”, zdefiniowanych w pewnym zamkniętym przedziale
liczbowym.
Dla każdego
[ ]
1
,
0
∈
α
dany zbiór rozmyty A daje zbiór nierozmyty postaci:
(
)
{
}
α
µ
α
≥
∈
=
x
X
x
A
A
;
,
(1)
nazywany
α
-przekrojem A. Ponieważ
2
1
α
α <
pociąga za sobą
2
1
α
α
A
A
⊇
, zbiór różnych
α
-
przekrojów tworzy zagnieżdżony ciąg zbiorów nierozmytych.
Dany zbiór rozmyty A jest jednoznacznie określony poprzez związany z nim ciąg
α
-
przekrojów, zgodnie z następujacą zależnością:
( )
( )
x
x
A
I
A
A
α
αµ
µ
α∈
=
sup
, (2)
gdzie
α
µ
A
oznacza funkcję przynależności
α
-przekroju
α
A ,
A
I natomiast podzbiór przedziału
[0,1], składający się z wartości
α
, takich że
( )
α
µ
=
x
A
dla pewnych x z X.
A
I nazywa się
zbiorem poziomu A.
Koncepcja
α
-przekrojów wyraża istotną zależność pomiędzy zbiorem klasycznym i
zbiorem rozmytym. Pozwala na dekompozycję zbioru rozmytego na zbiory klasyczne oraz
korzystanie z klasycznej teorii zbiorów. W przypadku liczb rozmytych, które należy tratować
jako znormalizowane i wypukłe zbiory rozmyte (Zob. np. Dubois and Prade 1988), określone na
przestrzeni liczb rzeczywistych, arytmetykę liczb rozmytych można sprowadzić to arytmetyki
przedziałów liczbowych (Moore 1966).
Można zdefiniować dwa rodzaje liczb kardynalnych dla zbiorów rozmytych, określonych
na skończonym zbiorze X. Skalarna liczba kardynalna jest liczbą rzeczywistą A , zdefiniowaną
następująco:
( )
∑
∈
=
X
x
A
x
A
µ
. (3)
Innym typem liczby kardynalnej jest rozmyta liczba kardynalna card(A), która jest liczbą
rozmytą definiowaną dla każdego
A
I
∈
α
, zgodnie z zależnością:
( )
( )
α
µ
α
=
A
A
card
. (4)
2.2
Teoria faktów
Teoria zdarzeń (faktów) (ang. Evidence Theory) opiera się na dwóch dualnych addytywnych
miarach, wiary (ang. belief) i ufności (ang. plausibility). Dla danego skończonego zbioru X miara
wiary jest funkcją:
( )
[ ]
1
,
0
:
Bel
→
X
P
taką, że:
4
( )
( )
1
Bel
,
0
Bel
=
=
∅
X
, (5)
(
)
( )
(
)
( )
(
)
n
n
j
k
j
k
j
j
n
A
A
A
A
A
A
A
A
A
∩
∩
∩
−
+
+
+
∩
−
≥
∪
∪
∪
+
<
∑
∑
!
!
!
2
1
1
2
1
Bel
1
Bel
Bel
Bel
(6)
Ze względu na własność (6) miary wiary zwane są miarami superaddytywnymi.
Miara ufności jest funkcją:
( )
[ ]
1
,
0
:
Pl
→
X
P
taką, że:
( )
( )
1
Pl
,
0
Pl
=
=
∅
X
, (7)
(
)
( )
(
)
( )
(
)
n
n
j
k
j
k
j
j
n
A
A
A
A
A
A
A
A
A
∪
∪
∪
−
+
+
+
∪
−
≤
∩
∩
∩
+
<
∑
∑
!
!
!
2
1
1
2
1
Pl
1
Pl
Pl
Pl
(8)
Ze względu na własność (8) miary ufności zwane są miarami subaddytywnymi.
Pomiędzy obydwiema miarami zachodzą następujące zależności:
( )
( )
A
A
Bel
1
Pl
−
=
, (9)
( )
( )
A
A
Bel
Pl
≥
. (10)
Wygodnie jest zdefiniować powyższe miary z wykorzystaniem funkcji zwanej
podstawowym przyporządkowaniem probabilistycznym:
( )
[ ]
1
,
0
:
→
X
P
m
,
która spełnia następujące własności:
( )
0
=
∅
m
,
( )
( )
∑
∈
=
X
P
A
A
m
1.
Wartość
( )
A
m
wyraża ułamek z jakim dostępne i znaczące fakty sprzyjają, że dany element z X,
którego charakterystyka w sensie istotnych atrybutów jest niekompletna, należy do zbioru A.
Miary wiary i ufności można wyrazić odpowiednio jako:
( )
∑
∈
=
A
B
B
B
m
A
;
)
(
Bel
, (11)
( )
∑
Θ
≠
∩
=
B
A
B
B
m
A
;
)
(
Pl
. (12)
Transformacja odwrotna może być wykonana zgodnie z zależnością:
( )
( )
( )
∑
⊆
−
−
=
A
B
B
B
A
B
A
m
;
Bel
1
(13)
oraz wzorem (9).

5
Dla danego podstawowego przyporządkowania probabilistycznego, każdy zbiór
( )
X
P
A
∈
, dla którego
( )
0
≠
A
m
nazywa się elementem fokalnym . Para (F,m), gdzie F oznacza
zbiór wszystkich elementów fokalnych indukowanych przez m, nazywa się zbiorem faktów,
zdarzeń.
2.3
Teoria prawdopodobieństwa
Rozważmy zbiór zdarzeń (F,m) w sensie teorii zdarzeń. Jest faktem dobrze znanym, że jeśli F
składa się wyłącznie ze zdarzeń elementarnych, to związane z tym miary wiary i ufności są sobie
równe oraz sprowadzają się do miary prawdopodobieństwa (Shafer 1976), która spełnia
własność addytywności.
Miara prawdopodobieństwa Pro, określona na skończonym zbiorze X, może być
jednoznacznie wyrażona poprzez funkcję rozkładu prawdopodobieństwa:
[ ]
1
,
0
:
→
X
p
,
zgodnie z zależnością:
( )
( )
∑
∈
=
A
x
x
p
A
Pro
(14)
Z punktu widzenia teorii faktów oczywistym jest że:
( )
{ }
( )
x
m
x
p
=
.
2.4
Teoria możliwości
Mówimy, że rodzina podzbiorów danego zbioru jest zagnieżdżona, jeśli te podzbiory mogą być
zagnieżdżone w taki sposób, że każdy z podzbiorów zawiera się w następnym. Na przykład:
X
A
A
A
A
⊂
⊂
⊂
⊂
4
3
2
1
jest zagnieżdżoną rodziną podzbiorów przestrzeni X.
Teoria możliwości stanowi specjalną gałąź teorii faktów, która związana jest z
zagnieżdżonymi elementami fokalnymi. Odpowiednikami miary wiary i ufności w teorii
możliwości są odpowiednio miara potrzeby i miara możliwości.
Miara możliwości (ang. possibility) jest jednoznacznie określona za pomocą funkcji
rozkładu możliwości
[ ]
1
,
0
:
→
X
r
zgodnie z zależnością:
( )
( )
A
x
x
r
A
∈
=
sup
Pos
, (15)
dla wszystkich
( )
X
P
A
∈
. Miara potrzeby (ang. necessity) Nec określona jest w sposób
następujący:
( )
( )
A
A
Pos
1
Nec
−
=
, (16)
co stanowi posybilistyczny odpowiednik zależności (9).
Rozkład możliwości może być wyrażony w oparciu o elementy fokalne. Załóżmy, że
{
}
n
x
x
x
X
,
,
,
2
1
!
=
oraz niech
n
A
A
A
⊂
⊂
⊂
!
2
1
, gdzie
{
}
i
i
x
x
x
A
,
,
,
2
1
!
=
(
)
n
i
,
,
2
,
1 !
=
będzie
kompletną sekwencją zagnieżdżonych podzbiorów, które zawierają wszystkie elementy fokalne
miary możliwości Pos. Wówczas, jeśli
( )
0
≠
A
m
, to
{
}
n
A
A
A
A
,
,
,
2
1
!
∈
. Niech ponadto
( )
i
i
A
m
m
=
oraz
( )
i
i
x
r
r
=
. Dla wszystkich i=1,2,…,n. zachodzą następujące zależności:
6
∑
=
=
n
i
k
k
i
m
r
, (17)
1
+
−
=
i
i
i
r
r
m
(18)
gdzie 0
1
=
+
n
r
. Warto zauważyć, że:
1
+
≥
i
i
r
r
dla wszystkich i=1,2,…,n-1 oraz
1
1
=
r
.
Teoria możliwości może nie tylko być sformułowana jako szczególny przypadek teorii
faktów z zagnieżdżonymi podzbiorami, ale również w oparciu o zbiory rozmyte. Rozkład
możliwości (Zadeh 1978) definiowany jest w oparciu o zbiór rozmyty. Dla danego zbioru
rozmytego A ze znormalizowaną funkcją przynależności
A
µ
można zdefiniować funkcję
rozkładu możliwości r
A
:
( )
( )
x
x
r
A
A
µ
=
, (19)
dla wszystkich x z X. Miara możliwości zdefiniowana jest następująco:
( )
( )
B
x
sup
Pos
∈
=
x
r
B
A
(20)
dla wszystkich
( )
X
P
B
∈
. Używając tej interpretacji elementy fokalne odpowiadają
α
-
przekrojom
α
A zbioru rozmytego A.
3.
Miary niepewności
Rozważa się trzy typy niepewności: rozmycie (nieokreśloność), co wiąże się z niedokładnymi
granicami zbiorów rozmytych, nieokreśloność (ang. nonspecificity) (niedokładność), co
związane jest z rozmiarami (liczbą kardynalną) istotnych zbiorów alternatyw oraz sprzeczność
(lub niezgodność, dysonans), co wyrażą konflikt pomiędzy różnymi zbiorami alternatyw.
3.1 Miary nieokreśloności
Miara niepewności i związanej z nią informacją została zaproponowana po raz pierwszy w
sensie klasycznej teorii zbiorów przez Hatrleya (1928). Miara ta wyrażona w bitach przyjmuje
postać:
( )
A
A
U
2
log
=
, (21)
gdzie |A| oznacza liczebność skończonego zbioru A. Jeden bit niepewności jest równoważny
całkowitej niepewności w stosunku do prawdy lub fałszu jednego stwierdzenia. Funkcja (21)
zwana jest funkcją Hartley’a.
Znaczenie niepewności mierzonej za pomocą funkcji Hartley’a zależy od znaczenia zbioru
A. Funkcja ta może być dobrze scharakteryzowana poprzez pojęcie nieokreśloność.
Naturalnym rozwinięciem funkcji Hartley’a na teorię zbiorów rozmytych i teorię
możliwości jest funkcja U-niepewność (Higashi and Klir 1983):
( )
α
α
d
A
A
U
∫
=
1
0
2
log
,
(22)
7
gdzie
α
A oznacza liczbę kardynalną
α
-przekroju zbioru A. warto zwrócić uwagę, że U(A) jest
średnią ważoną funkcji Hartley’a dla wszystkich
α
-przekrojów.
Dla skończonych i uporządkowanych rozkładów możliwości funkcja U-niepewność może
być wyrażona w następujący sposób:
( )
(
)
∑
∑
=
=
+
−
=
−
=
n
i
n
i
i
i
i
i
i
r
i
r
r
r
U
2
2
2
2
1
1
log
log
(23)
gdzie 0
1
=
+
n
r
.
Zakładając, że rozkład możliwości r reprezentuje znormalizowany zbiór rozmyty A można
pokazać, że U(r)=U(A), wtedy gdy
1
+
≥
i
i
r
r
oraz i jest liczbą kardynalną
α
-
przekroju, dla którego
i
r
=
α
. Korzystając za zależności (18) otrzymamy:
( )
∑
=
=
n
i
i
i
m
m
U
2
2
log , (24)
gdzie
(
)
n
m
m
m
,
,
,
2
1
!
=
m
jest podstawowym przyporządkowaniem probabilistycznym,
odpowiadającym rozkładowi możliwości
(
)
n
r
r
r
,
,
,
2
1
!
=
r
.
Funkcja U-nieokreśloność może być zastosowana dla dowolnego zbioru faktów (F,m):
( )
( )
∑
∈
=
F
A
A
A
m
m
N
2
log
. (25)
Funkcja N jest oczywiście średnią ważoną funkcji Hartley’a dla wszystkich elementów
fokalnych. Wagami są wartości podstawowego przyporządkowania probabilistycznego. Dla
każdego elementu fokalnego A, m(A) oznacza stopień faktu zogniskowanego na A, podczas gdy
A
2
log
oznacza brak określoności przypisania faktu. Im większa jest wartość m(A), tym bardziej
wiarygodne są fakty, natomiast im większy jest zbiór A, (
A
2
log
), ty mniej określony jest zbiór
tych faktów.
Ponieważ dla rozkładu prawdopodobieństwa mamy do czynienia ze zdarzeniami
elementarnymi, to
0
log
2
=
A
dla każdego elementu fokalnego i w konsekwencji N(m)=0.
3.2
Miary niezgodności
Ponieważ miara nieokreśloności jest równa zero, tzn. wszystkie miary prawdopodobieństwa są w
pełni określone, dla każdego rozkładu prawdopodobieństwa, w celu pełnego odróżnienia miar
probabilistycznych celowe jest wprowadzenie innej miary, a mianowicie entropii
Shannona (1948):
( )
{ }
( )
{ }
( )
∑
∈
−
=
X
x
x
m
x
m
m
H
2
log
, (26)
która mierzy średnią niepewność (w bitach), związaną z predykcją wyników eksperymentu
losowego i stanowi wartość oczekiwaną konfliktu pomiędzy wartościami faktów.
W teorii faktów zaproponowano dwie miary, które są odpowiednikami entropii Shannona,
a mianowicie miarę niezgodności (ang. dissonance) Yager (1983):

8
( )
( )
( )
∑
∈
−
=
F
A
A
A
m
m
E
Pl
log
2
, (27)
oraz miarę zamieszania (ang. confusion) (pomyłki) (Hoele 1982):
( )
( )
( )
∑
∈
−
=
F
A
A
A
m
m
C
Bel
log
2
, (28)
W przypadku miary prawdopodobieństwa obydwie funkcje sprowadzają się do entropii
Shannona (26).
Klir (1993) pokazał, że w teorii faktów najlepszą funkcją mierząca konflikt jest funkcja
dysonansu S (ang. strife) zdefiniowana jako:
( )
( )
( )
∑
∑
∈
∈
∩
−
=
F
A
F
B
A
B
A
B
m
A
m
m
S
2
log
(29)
Funkcja S(m) może być również wyrażona jako:
( )
( ) ( )
m
Z
m
N
m
S
−
=
, (30)
gdzie N(m) jest miarą nieokreśloności (25), natomiast funkcja Z(m) zdefiniowana jest jako:
( )
( )
( )
∑
∑
∈
∈
∩
⋅
=
F
A
F
B
B
A
B
m
A
m
m
Z
2
log
(31)
W teorii możliwości dla uporządkowanego rozkładu możliwości funkcja dysonansu
zdefiniowana jest jako:
( )
( )
(
)
∑
∑
=
=
+
−
−
=
n
i
i
j
j
i
i
r
r
r
r
U
r
S
2
1
2
1
log
, (32)
gdzie U(r) jest miarą posybilistycznej nieokreśloności (U-niepewność). Funkcja S(r) może być
również wyrażona jako:
( )
(
)
∑
∑
=
=
+
−
=
n
i
i
j
j
i
i
r
i
r
r
r
S
2
1
2
1
log
(33)
3.3
Sumaryczna niepewność w teorii faktów
Ponieważ w teorii faktów istnieją obok siebie dwa typy niepewności, a mianowicie
nieokreśloność oraz niezgodność, wydaje się sensownym dokonać połączenia miar dotyczących
tych niepewności w jedną miarę. Lamata i Moral (1988) proponują wykorzystać sumę
algebraiczną obu wielkości:
( )
( ) ( )
m
S
m
N
m
NS
+
=
(34)
9
Miara NS sprowadza się do następujących zależności odpowiednio dla teorii faktów i teorii
możliwości:
( )
( )
( )
∑
∑
∈
∈
∩
=
F
A
F
B
B
A
B
m
A
A
m
m
NS
2
2
log
, (35)
( )
(
)
∑
∑
=
=
+
−
=
n
i
i
j
j
i
i
r
i
r
r
r
NS
2
1
2
2
1
log
. (36)
Uwagi:
1. NS wyraża się w bitach.
2. W przypadku rozkładu prawdopodobieństwa NS przyjmuje postać entropii Shannona.
3.4
Wykorzystanie miar niepewności do oceny zbioru faktów
W poprzednim punkcie przedstawiono podstawowe miary niepewności związane z oceną zbioru
faktów. Miary te podzielono na dwie zasadnicze grupy:
1. Miary nieokreśloności,
2. Miary niezgodności
Miara nieokreśloności opiera się na funkcji Hartley’a U(A) (21) i dla dowolnego zbioru
faktów (F,m) wyraża się funkcją nieokreśloności U(m) (25). Określa ona stopień niedokładności
danych. W przypadku zagnieżdżonych elementów fokalnych (rozkład możliwości) można
stosować formułę (23). Może być ona również stosowana do oceny niepewności zbioru
rozmytego.
Miary niezgodności pozwalają na stwierdzenie stopnia konfliktu pomiędzy danymi i
opierają się o entropię Shannona N(m) (26). W przypadku ogólnym dla dowolnego zbioru
faktów (F,m) stosuje się dwie miary, a mianowicie miarę niezgodności E(m) (27) oraz miarę
zamieszania C(m) (28). Dla rozkładu prawdopodobieństwa miary te są sobie równe i
sprowadzają się do entropii Shannona N(m) (26).
Funkcja niezgodności E(m) jest równa zero wtedy i tylko wtedy, gdy iloczyn
mnogościowy faktów jest niepusty. Mówimy wtedy, że mamy do czynienia ze zgodnym zbiorem
faktów. Każdy rozkład możliwości, ze względu na własność zagnieżdżenia związany jest ze
zgodnym zbiorem faktów. Ponadto jeśli dla danego niezagniżdżonego zbiór faktów otrzymamy
wartość funkcji niezgodności równą zero, można go poprzez odpowiednie przekształcenie
sprowadzić do zbioru zagnieżdżonego (Dubois and Prade 1988).
Obliczając zatem wartość funkcji niezgodności dla danego zbioru faktów możemy na tej
podstawie wybrać odpowiedni opis do ich reprezentacji. Jeśli miara niezgodności równa się
mierze zamieszania oraz funkcja nieokreśloności równa jest zero, mamy do czynienia z
rozkładem probabilistycznym. Jeśli natomiast funkcja niezgodności jest równa zero, można
stosować opis posybilistyczny.
Jak już wspomniano wcześniej do pomiaru konfliktu w ogólnej teorii faktów stosuje się
funkcję dysonansu S(m). Po zsumowaniu tej miary z miarą nieokreśloności otrzymuje się miarę
niepewności dla danego zbioru faktów, która jest użyteczna w dokonywaniu transformacji z
opisu probabilistycznego na opis posybilistyczny i odwrotnie.

10
4.
Transformacja rozkładu możliwości na rozkład prawdopodobieństwa i odwrotnie
Istnieje wiele metod transformacji z rozkładu prawdopodobieństwa na rozkład możliwości i
odwrotnie. Metody te zależą od typu rozwiązywanego problemu, związanego z daną
transformacją. W niniejszym opracowaniu omawia się dwa rodzaje transformacji, a mianowicie
klasyczną już transformacje wprowadzoną przez Dubois i Prade (1983), opartą o koncepcję
niedokładnego prawdopodobieństwa oraz transformację Klira (1993) zachowującą niepewność
danych podczas jej dokonywania.
4.1
Podejście Dubois i Prade’a
Podejście do teorii możliwości zaproponowane przez Dubois i Prade’a (1983), opiera się na
koncepcji nierównych prawdopodobieństw dla zdarzeń elementarnych oraz niedokładnego
prawdopodobieństwa (Shafer 1976). Jeśli weźmiemy pod uwagę rzut monetą to mamy do
czynienia z następującym zbiorem zdarzeń elementarnych
{
}
reszka
orzel,
2
1
=
=
=
x
x
X
. Jeśli
ponadto założymy, że moneta jest zniekształcona (ang. biased): 1
1
2
1
1
2
1
≥
≥ ≥
= −
p
p
p , gdzie
p
i
oznacza prawdopodobieństwo zajścia zdarzenia x i
i
,
,
=
1 2, można wprowadzić stopień
potrzeby (ang. necessity) na korzyść zajścia zdarzenia x
1
zdefiniowany następująco:
n
p
p
1
1
2
=
−
,
co również oznacza niemożliwość zajścia zdarzenia x
2
. Odpowiedni stopień możliwości zajścia
zdarzenia x
2
wyrazi się następującą zależnością:
π
2
1
2
1
2
= − =
n
p . (37)
Autorzy (Dubois and Prade 1983) definiują pozostałe stopnie następująco:
n
2
1
0
1
=
=
,
.
π
Warto zauważyć, że danemu zdarzeniu przyporządkowana jest para (potrzeba, możliwość).
W oparciu o przedstawioną ideę można zdefiniować transformację prawdopodobieństwo -
możliwość i odwrotnie.
Do dalszych rozważań przyjmijmy zbiór zdarzeń elementarnych:
{
}
X
x i
n
i
=
=
;
,
,
1 2!
.
Załóżmy, że p
p
p
n
1
2
≥
≥ ≥
!
, gdzie
{ }
( )
1
,
Pro
1
=
=
∑
=
n
i
i
i
i
p
x
p
oraz Pro jest miarą
prawdopodobieństwa (14) zdefiniowaną zgodnie z aksjomatyczną definicją prawdopodobieństwa
Bayesa. Załóżmy ponadto, że
{
}
i
i
x
,
,x
x
A
!
2
1
=
oraz
∅
=
0
A
. Dubois i Prade (1983)
wprowadzają następującą definicję stopnia potrzeby.
Definicja 1. Stopniem potrzeby zajścia zdarzenia
X
A
∈
jest dodatkowa ilość
prawdopodobieństwa związanego ze zdarzeniami elementarnymi ze zbioru A w porównaniu
z ilością prawdopodobieństwa przypisaną najczęściej występującemu zdarzeniu nie należącemu
do zbioru A:
( )
∑
∈
∉
−
=
A
j
k
x
A
x
k
j
p
p
A
0
,
max
max
Nec
. (38)
11
Jeśli
i
A
A
=
otrzymujemy
( )
(
)
n
i
p
p
A
u
j
i
j
i
,
,
1
,
Nec
1
1
!
=
−
=
∑
=
+
, (39)
gdzie: p
n
+
=
1
0.
Na podstawie zależności (16) otrzymujemy(Dubois and Prade 1983):
(
)
∀
=
=
∑
i
p p
i
i
j
j
n
π
min
,
1
, (40)
przy czym spełniony jest warunek:
( )
( )
( )
A
A
A
A
Pos
Pro
Nec
≤
≤
∀
. (41)
Zależność (41) jest bardzo ważna z punktu widzenia praktycznego. Miara potrzeby i miara
możliwości mogą być interpretowane jako odpowiednio górne i dolne ograniczenie na miarę
prawdopodobieństwa. Innymi słowy miara prawdopodobieństwa nie może być większa od miary
możliwości i mniejsza od miary potrzeby. W praktyce, gdy nie mamy do czynienia z danymi
dokładnymi (np. opinia ekspertów, brak zgodności opinii ekspertów) jesteśmy w stanie obliczyć
przedział liczbowy w którym znajduje się prawdopodobieństwo.
Przekształcenie odwrotne do (40) wyraża się zależnością (Dubois and Prade 1983):
(
)
1
1
,
,
1
+
=
−
=
=
∀
∑
j
i
n
i
j
i
j
p
n
i
π
π
!
, (42)
gdzie: 0
1
=
+
n
π
.
4.2
Podejście Klira
Załóżmy, że mamy skończone uporządkowane rozkłady możliwości
(
)
n
r
r
r
,
,
,
2
1
!
=
r
oraz
prawdopodobieństwa
(
)
n
p
p
p
,
,
,
2
1
!
=
p
. Klir (1993) proponuje następujące przekształcenie
rozkład prawdopodobieństwa na rozkład możliwości:
n
i
p
p
r
i
i
,
,
2
,
1
,
1
!
=
=
α
, (43)
gdzie wykładnik
α
powinien być dobrany zgodnie z zależnością:
( )
( ) ( )
1
0
,
<
<
+
=
α
r
S
r
N
p
H
(44)
Przekształcenie odwrotne powinno być zrealizowane zgodnie z formułą:
n
i
r
r
p
n
k
k
i
i
,
,
2
,
1
,
1
1
1
!
=
=
∑
=
α
α
, (45)
12
również dobierając
α
zgodnie z zależnością (44), która ma zapewnić zgodność pomiędzy
prawdopodobieństwem i możliwością w sensie (41). Tego typu transformacja jest jednoznaczna
w obydwu kierunkach i zawsze istnieje (Klir 1993).
Zgodnie z (26),(36) oraz (44) współczynnik
α
przy transformacji prawdopodobieństwo-
możliwość należy wyznaczyć na podstawie zależności:
∑
∑
∑
=
=
+
=
−
=
−
n
i
i
j
j
i
i
n
i
i
i
p
p
i
p
p
p
p
p
p
2
1
1
2
2
1
1
1
1
2
log
log
α
α
α
, (46)
natomiast przy transformacji możliwość - prawdopodobieństwo korzystając z formuły:
(
)
∑
∑
∑
∑
∑
=
=
+
=
=
=
−
=
−
n
i
i
j
j
i
i
n
i
i
n
k
k
i
n
k
k
i
r
i
r
r
r
r
r
r
2
1
2
2
1
1
1
1
1
2
1
1
1
log
log
α
α
α
α
(47)
4.3 Uwagi dotyczące realizacji numerycznej transformacji
Transformacja wprowadzona przez Dubois i Prade’a (1983) może być zrealizowana w bardzo
prosty sposób, ponieważ wymaga prostych operacji arytmetycznych. Może być również w prosty
sposób rozwinięta dla przypadku ciągłego. Transformacja Klira wymaga, oprócz prostych
operacji algebraicznych wyznaczenia współczynnika skalującego
α
, co sprowadza się do
rozwiązania równania (46) lub (47) ze względu na ta zmienną, czego nie można dokonać w
sposób jawny ponieważ w obydwu przypadkach mamy do czynienia z równaniami w postaci
uwikłanej. Biorąc pod uwagę fakt dostępności skutecznych metod numerycznych do
rozwiązywania takich równań, rozwiązanie ich z punktu widzenia numerycznego nie powinno
stanowić większego problemu.
5.
Przykłady obliczeniowe
5.1
Miary niepewności (Klir 1987)
Dane związane z różnymi typami omawianych rozkładów zaczerpnięto z pracy (Klir 1987).
W
Tablicach 1, 2 oraz 3 zestawiono odpowiednio rozkład możliwości, rozkład
prawdopodobieństwa oraz ogólny rozkład zbioru faktów. Dla rozkładu możliwości zdarzenia
tworzą zbiór zagnieżdżonych podzbiorów, natomiast dla rozkładu prawdopodobieństwa stanowią
zdarzenia elementarne.
Obliczone wartości miar niezgodności, zamieszania oraz nieokreśloności dla
poszczególnych rozkładów zestawiono w Tablicy 4. Warto zwrócić uwagę, że dla rozkładu
prawdopodobieństwa miary niezgodności i zamieszania są sobie równe, natomiast miara
nieokreśloności jest równa zero. Rozkład prawdopodobieństwa jest zawsze dokładny, natomiast
nie jest nigdy rozkładem zgodnym. W przypadku rozkładu możliwości i rozkładu zbioru faktów
występuje brak dokładności, natomiast w rozważanym przypadku obydwa rozkłady są zgodne,
ponieważ miara niezgodności równa jest zero. W ogólnym przypadku dowolny zbiór faktów nie
musi być zgodny. Zbiór możliwości zawsze stanowi zgodny zbiór faktów, gdyż mamy zawsze
do czynienia z zagnieżdżonymi elementami fokalnymi.
13
Tablica 1. Rozkład możliwości
4
3
2
1
x
x
x
x
X
∪
∪
∪
=
Miara możliwości
A:
A
m
1
(A)
Bel
1
(A)
Pl
1
(A)
∅
0
0
0
0
4
x
1
0.3
0.3
1
3
x
1
0
0
0.7
4
3
x
x
∪
2
0.2
0.5
1
2
x
1
0
0
0.5
4
2
x
x
∪
2
0
0.3
1
3
2
x
x
∪
2
0
0
0.7
4
3
2
x
x
x
∪
∪
3
0.4
0.5
1
1
x
1
0
0
0.1
4
1
x
x
∪
2
0
0.3
0.1
3
1
x
x
∪
2
0
0
0.7
4
3
1
x
x
x
∪
∪
3
0
0.5
1
2
1
x
x
∪
2
0
0
0.5
4
2
1
x
x
x
∪
∪
3
0
0.3
1
3
2
1
x
x
x
∪
∪
3
0
0.2
0.7
4
3
2
1
x
x
x
x
∪
∪
∪
4
0.1
1
1
Tablica 2. Rozkład prawdopodobieństwa
4
3
2
1
x
x
x
x
X
∪
∪
∪
=
Miara prawdopodobieństwa
A:
A
m
1
(A)
Bel
1
(A)
Pl
1
(A)
∅
0
0
0
0
4
x
1
0.3
0.3
0.3
3
x
1
0.2
0.2
0.2
4
3
x
x
∪
2
0
0.5
0.5
2
x
1
0.4
0.4
0.4
4
2
x
x
∪
2
0
0.7
0.7
3
2
x
x
∪
2
0
0.6
0.6
4
3
2
x
x
x
∪
∪
3
0
0.9
0.9
1
x
1
0.1
0.1
0.1
4
1
x
x
∪
2
0
0.4
0.4
3
1
x
x
∪
2
0
0.3
0.3
4
3
1
x
x
x
∪
∪
3
0
0.6
0.6
2
1
x
x
∪
2
0
0.5
0.5
4
2
1
x
x
x
∪
∪
3
0
0.8
0.8
3
2
1
x
x
x
∪
∪
3
0
0.7
0.7
4
3
2
1
x
x
x
x
∪
∪
∪
4
0
1
1
14
Tablica 3. Ogólny rozkład zbioru faktów
4
3
2
1
x
x
x
x
X
∪
∪
∪
=
Miara teorii faktów
A:
A
m
1
(A)
Bel
1
(A)
Pl
1
(A)
∅
0
0
0
0
4
x
1
0
0
0.8
3
x
1
0
0
0.7
4
3
x
x
∪
2
0.1
0.1
1
2
x
1
0
0
0.6
4
2
x
x
∪
2
0.2
0.2
1
3
2
x
x
∪
2
0.1
0.1
1
4
3
2
x
x
x
∪
∪
3
0.1
0.5
1
1
x
1
0
0
0.5
4
1
x
x
∪
2
0
0
0.9
3
1
x
x
∪
2
0
0
0.8
4
3
1
x
x
x
∪
∪
3
0.3
0.4
1
2
1
x
x
∪
2
0
0
0.9
4
2
1
x
x
x
∪
∪
3
0.1
0.3
1
3
2
1
x
x
x
∪
∪
3
0
0.2
1
4
3
2
1
x
x
x
x
∪
∪
∪
4
0.1
1
1
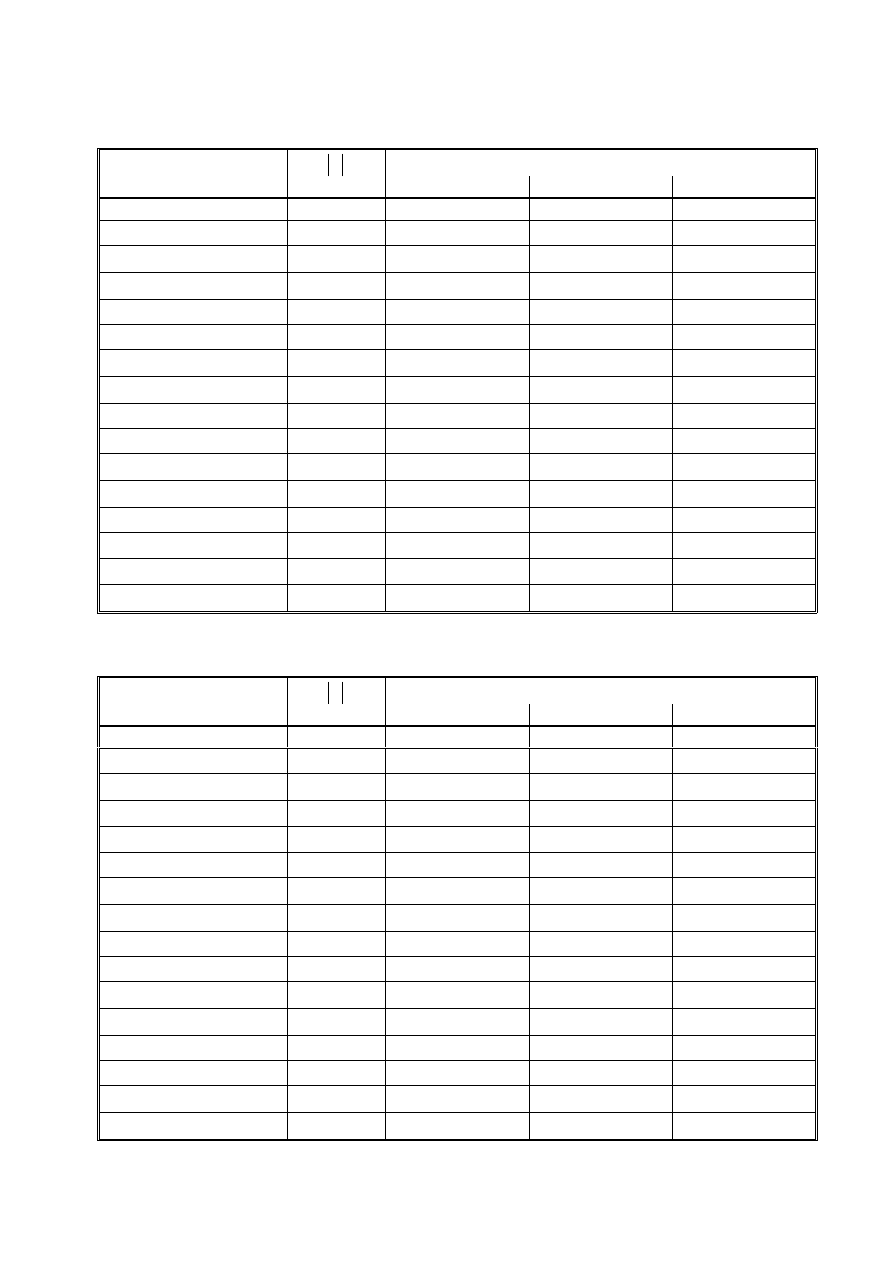
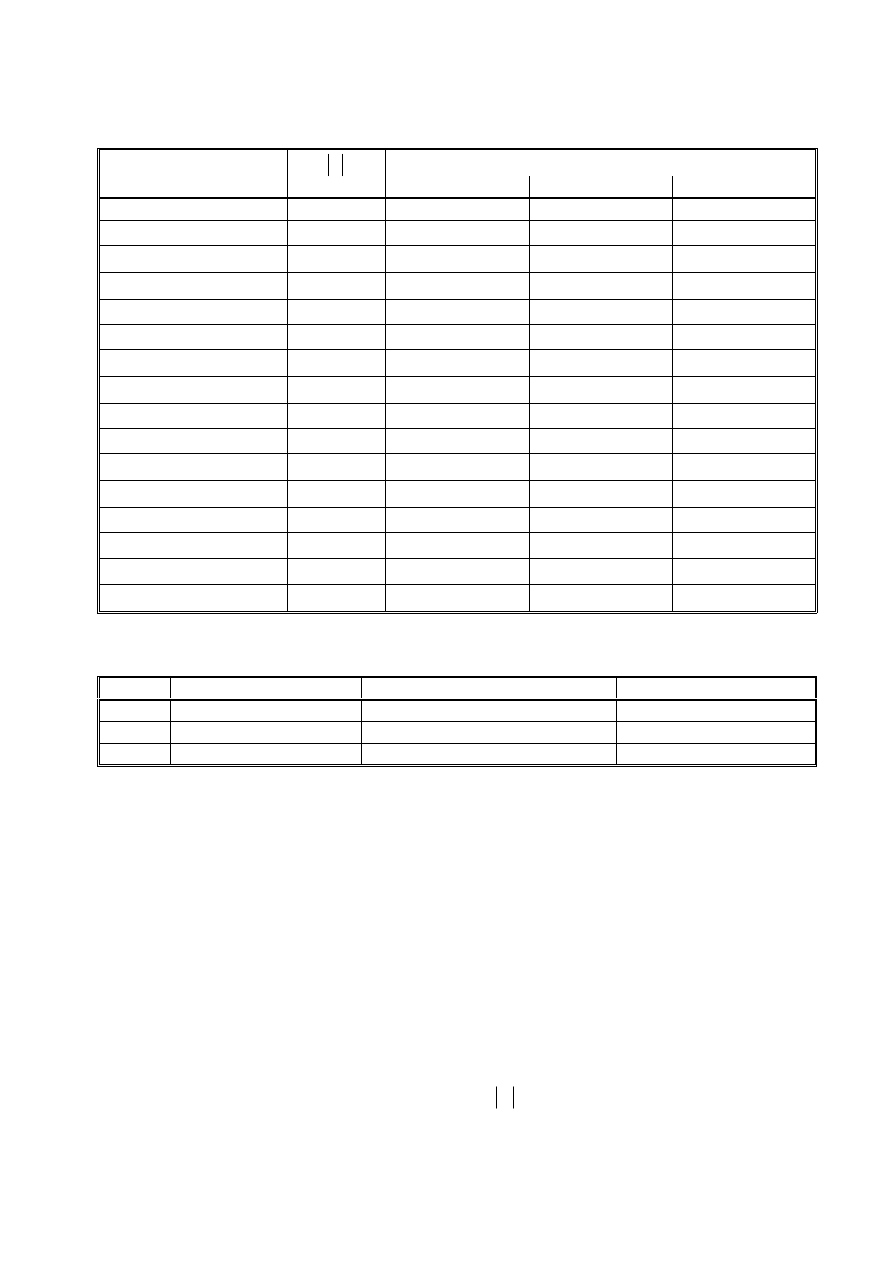
Tablica 4. Miary niepewności dla rozkładu możliwości, prawdopodobieństwa oraz zbioru faktów
Miara
Rozkład możliwości
Rozkład prawdopodobieństwa
Rozkład zbioru faktów
E(m)
0
1.85
0
C(m)
1.12
1.85
2.03
U(m)
1.03
0
1.35
5.2
Transformacja prawdopodobieństwo-możliwość
Załóżmy, że mamy rozkład prawdopodobieństwa:
(
) (
) (
) (
) (
) (
) (
)
{
}
7
6
5
4
3
2
1
1
,
02
.
0
,
,
05
.
0
,
,
25
.
0
,
,
3
.
0
,
,
25
.
0
,
,
1
.
0
,
0.03,
x
x
x
x
x
x
x
=
p
,
który po uporządkowaniu przyjmie postać:
(
) (
) (
) (
) (
) (
) (
)
{
}
7
1
6
2
5
3
4
2
,
02
.
0
,
0.03,
,
,
05
.
0
,
,
1
.
0
,
,
25
.
0
,
,
25
.
0
,
,
3
.
0
x
x
x
x
x
x
x
=
p
.
Funkcja U-nieokreśloność (25) przyjmie wartość:
( )
0
log
7
1
2
=
=
∑
=
i
i
i
x
p
p
N
,
15
ponieważ
7
,
,
2
,
1
,
0
log
2
!
=
=
i
x
i
,
natomiast entropia Shannona (26):
( )
3340
.
2
log
7
1
2
=
=
∑
=
i
i
i
p
p
p
H
.
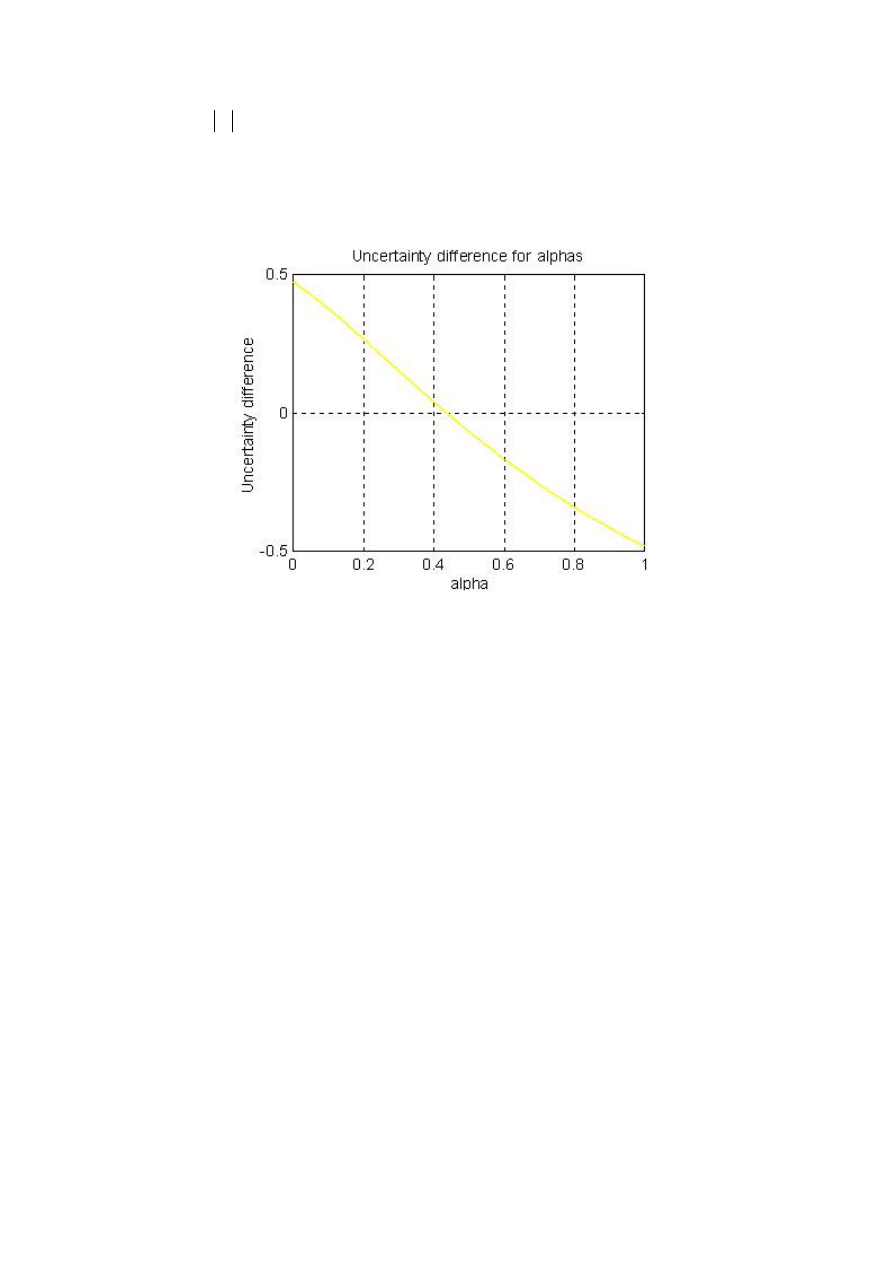
Rys.1 Różnica niepewności w funkcji współczynnika
α
W celu dokonania transformacji z rozkładu prawdopodobieństwa na rozkład możliwości
należy znaleźć taki współczynnik
α
, dla którego spełniona jest zależność dotycząca zachowania
miary niepewności podczas transformacji (44), która dla rozważanej transformacji przyjmuje
postać (46). Ze względów obliczeniowych wygodniej przyjąć
( )
( )
0
,
)
,
(
,
=
−
+
α
α
α
p
H
r
S
r
N
.
Różnica ta dla rozważanego przypadku w funkcji współczynnika
α
przedstawiona jest na Rys. 1.
Przyjmuje ona wartość 0 dla
α
=0.4380. W konsekwencji otrzymujemy następujący
uporządkowany rozkład możliwości:
(
) (
) (
) (
) (
) (
) (
)
{
}
7
1
6
2
5
3
4
2
,
3054
.
0
,
0.3648,
,
,
4562
.
0
,
,
6180
.
0
,
,
9232
.
0
,
,
9232
.
0
,
,
0
.
1
x
x
x
x
x
x
x
=
r
,
co daje:
(
) (
) (
) (
) (
) (
) (
)
{
}
7
6
5
4
3
2
1
1
,
3054
.
0
,
,
4562
.
0
,
,
9232
.
0
,
,
0
.
1
,
,
9232
.
0
,
,
6180
.
0
,
0.3648,
x
x
x
x
x
x
x
=
r
.
Sumaryczna niepewność NS(r), związana z rozkładem, wynosi 2.3340.
Wykorzystując transformację zaproponowaną przez Dubois i Prade’a (40) otrzymujemy:
(
) (
) (
) (
) (
) (
) (
)
{
}
7
1
6
2
5
3
4
4
,
14
.
0
,
0.2,
,
,
3
.
0
,
,
5
.
0
,
,
95
.
0
,
,
95
.
0
,
,
0
.
1
x
x
x
x
x
x
x
=
r
oraz w postaci nieuporządkowanej:
(
) (
) (
) (
) (
) (
) (
)
{
}
7
6
5
4
3
2
1
3
,
14
.
0
,
,
3
.
0
,
,
95
.
0
,
,
0
.
1
,
,
95
.
0
,
,
5
.
0
,
0.2,
x
x
x
x
x
x
x
=
r
.

16
Sumaryczna miara niepewności dla otrzymanego rozkładu możliwości wynosi NS(r)=2.1542 i
jest mniejsza od miary niepewności dla rozważanego rozkładu prawdopodobieństwa.
6.
Uwagi i wnioski
W opracowaniu przedstawiono trzy alternatywne metody opisu niepewności na gruncie teorii
faktów Shafera, a mianowicie teorię prawdopodobieństwa, teorię możliwości oraz teorię zbiorów
rozmytych. Omówiono podstawowe miary niepewności, związane z rozważanymi opisami oraz
ich własności.
Ze względu na różne typy danych, występujących w zagadnieniu analizy ryzyka złożonych
systemów przemysłowych, na podstawie danych literaturowych, zaproponowano metody
transformacji danych probabilistycznych na posybilistyczne i odwrotnie. Pokazano również
zależność pomiędzy zbiorem rozmytym i miarą możliwości, stosowaną w opisie
probabilistycznym. Zawarto uwagi dotyczące realizacji numerycznej przedstawionych metod
transformacji.
Należy podkreślić, że metoda transformacji, zaproponowana przez Klira (1993) zachowuje
niepewność danych w sensie zdefiniowanych miar niepewności. Z drugiej jednak strony mimo,
że transformacja wprowadzona przez Dubois i Prade’a (1983) nie zachowuje niepewności, jest
dobrze uzasadniona w oparciu o koncepcję zniekształconego eksperymentu losowego.
Literatura
Dubois D., Prade H. 1983. Unfair coins and necessity measures: towards a possibilistic
interpretation of histograms. Fuzzy Sets and Systems 10:15-20.
Dubois D., Prade H. 1986. Fuzzy sets and statistical data. European J. Operational Research 25:
345-356.
Dubois D., Prade H. 1988. Possibility Theory. An approach to computerized Processing of
Uncertainty. New York: Plenum Press.
Hartley R.V.L. 1928. Transmisson of information. The Bell System Technical J. , 7: 535-563.
Hoele U. 1982. Entropy with respect to plausibility measures. Proc. 12
th
IEEE Intern. Symp. on
Multiple Valued-Logic: 167-169.
Higashi M., Klir G.J. 1983. On the notion of distance representing information closeness:
Possibility and probability distributions. Intern. J. General Systems 9 (2): 103-115.
Klir G., Folgar T. 1987. Fuzzy Sests, Uncertainty and Information, Prentice Hall.
Klir G.J. 1993. Developments in Uncerainty-Based Information. In Advances in Computers
(M. C. Yovits Ed.) Academic Press: Harcourt Brace Jovanovich, New York.
Lamat M.T. Moral S. 1988. Measures of entropy in the theory of evidence. Intern. J. of General
Systems 14 (4): 297-305.
Moore R. 1966. Interval Analysis. Englewood Cliffs: Prentice Hall.
Shafer G. 1976. A Mathematical Theory of Evidence. Princeton University Press, Princeton,
New Jersey.
Shannon C.E. 1948.The mathematical theory of Communication. He Bell System Technical
Journal 27: 379-423,623-656.
Yager R.R. 1983. Entropy and specificity in mathematical theory of evidence. International
Journal of General Systems 9 (4):249-260.
Zadeh L.A. 1978. Fuzzy sets as a basis for atheory of possibility. Fuzzy Sets and Systems
1 (1): 3-28.
Wyszukiwarka
Podobne podstrony:
Badania operacyjne wyklad 2 id Nieznany
Badania operacyjne, zadanie id Nieznany (2)
Badania operacyjne wyklad 2 id Nieznany
Badania operacyjne, zadanie id Nieznany (2)
Badanie odbiornikow RLC id 7741 Nieznany (2)
badania instalacji i lini id 76 Nieznany (2)
Badanie hartownosci stali id 77 Nieznany (2)
Badanie ukladu nerwowego id 781 Nieznany
3 podstawowe operacje cd id 339 Nieznany (2)
Badanie halasu pojazdow id 7715 Nieznany (2)
Kulej M Badania Operacyjne w4m id 74430
badanie wskaznik tlenowy id 783 Nieznany (2)
badanie przedmiotowe MK id 7770 Nieznany (2)
Plik acrobat Cwiczenie 4 id 630 Nieznany
Badanie transformatora A4 id 77 Nieznany
BADANIE METOD PRACY id 77303 Nieznany (2)
Badania przesiewowe 2011 id 766 Nieznany (2)
Badanie twardosci metali id 780 Nieznany (2)
BADANIE WPROW MYSZ 3 id 78315 Nieznany (2)
więcej podobnych podstron