Laboratorium Podstaw Automatyki i Regulacji Automatycznej II
1
2
Realizacja układów kombinacyjnych na PLC
Informacje wst
ę
pne:
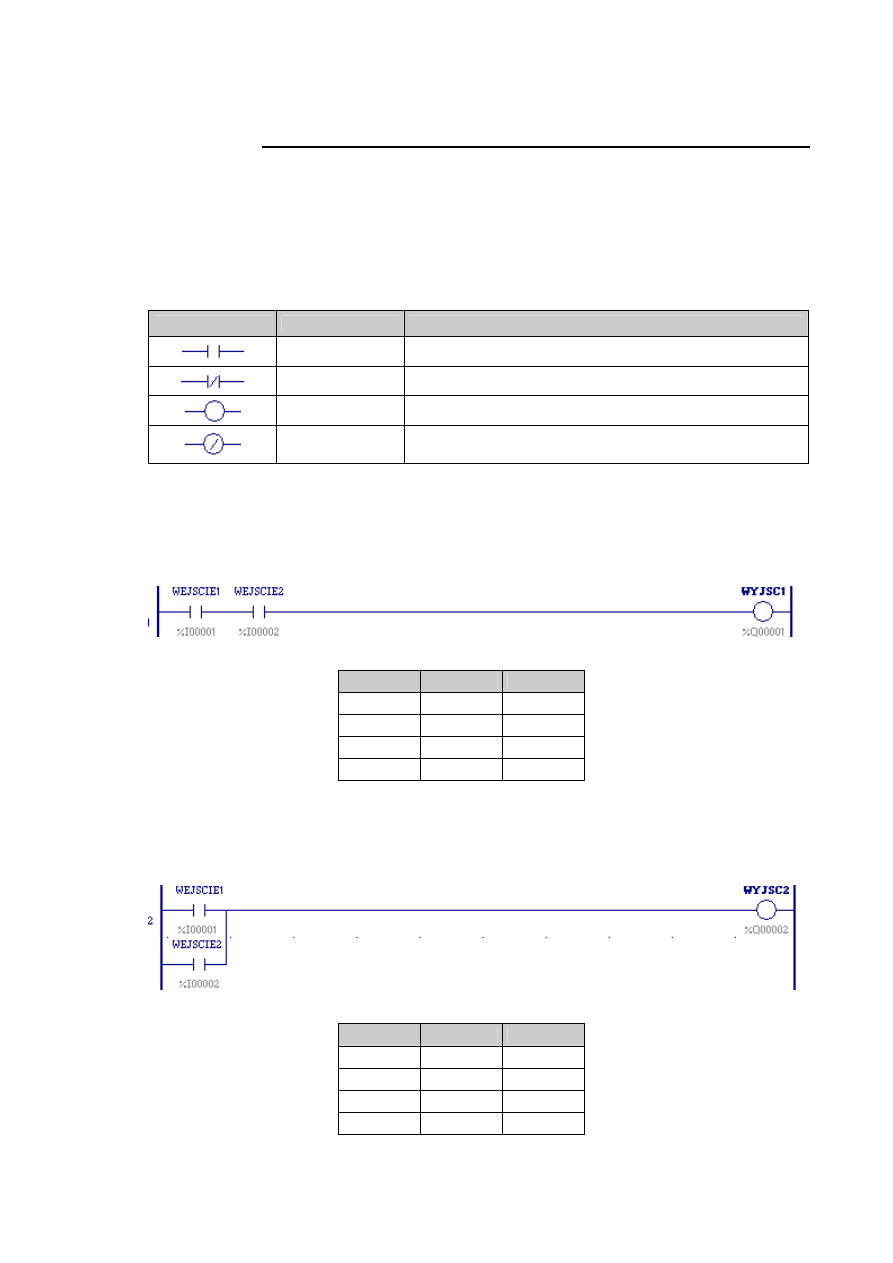
PODSTAWOWE SYMBOLE STYKÓW I CEWEK
Symbole styków i cewek przeka
ź
ników (Contacts i Coils) stosowane przy programowaniu drabinkowym
sterowników GE Fanuc serii 90-30 i VersaMax:
Symbol graficzny
Symbol tekstowy
Opis
NOCON
styk normalnie otwarty
NCCON
styk normalnie zwarty, neguje stan zmiennej do niego przypisanej
COIL
cewka przeka
ź
nika o stykach normalnie otwartych
NCCOIL
cewka przeka
ź
nika o stykach normalnie zwartych, neguje stan
zmiennej do niej przypisanej
Na ekranie edycji schematu drabinkowego po lewej stronie jest linia zasilania, po prawej – linia masy.
Iloczyn logiczny AND
WYJSC1
=
WEJSCIE2
•
WEJSCIE1
realizowany jest przez szeregowe poł
ą
czenie styków:
Tablica prawdy:
WEJSCIE1 WEJSCIE2
WYJSC1
0
0
0
0
1
0
1
0
0
1
1
1
Suma logiczna OR
WYJSC2
=
WEJSCIE2
+
WEJSCIE1
realizowana jest przez poł
ą
czenie równoległe styków:
Tablica prawdy:
WEJSCIE1 WEJSCIE2
WYJSC2
0
0
0
0
1
1
1
0
1
1
1
1
Realizacja układów kombinacyjnych na PLC
2
Laboratorium Podstaw Automatyki i Regulacji Automatycznej II
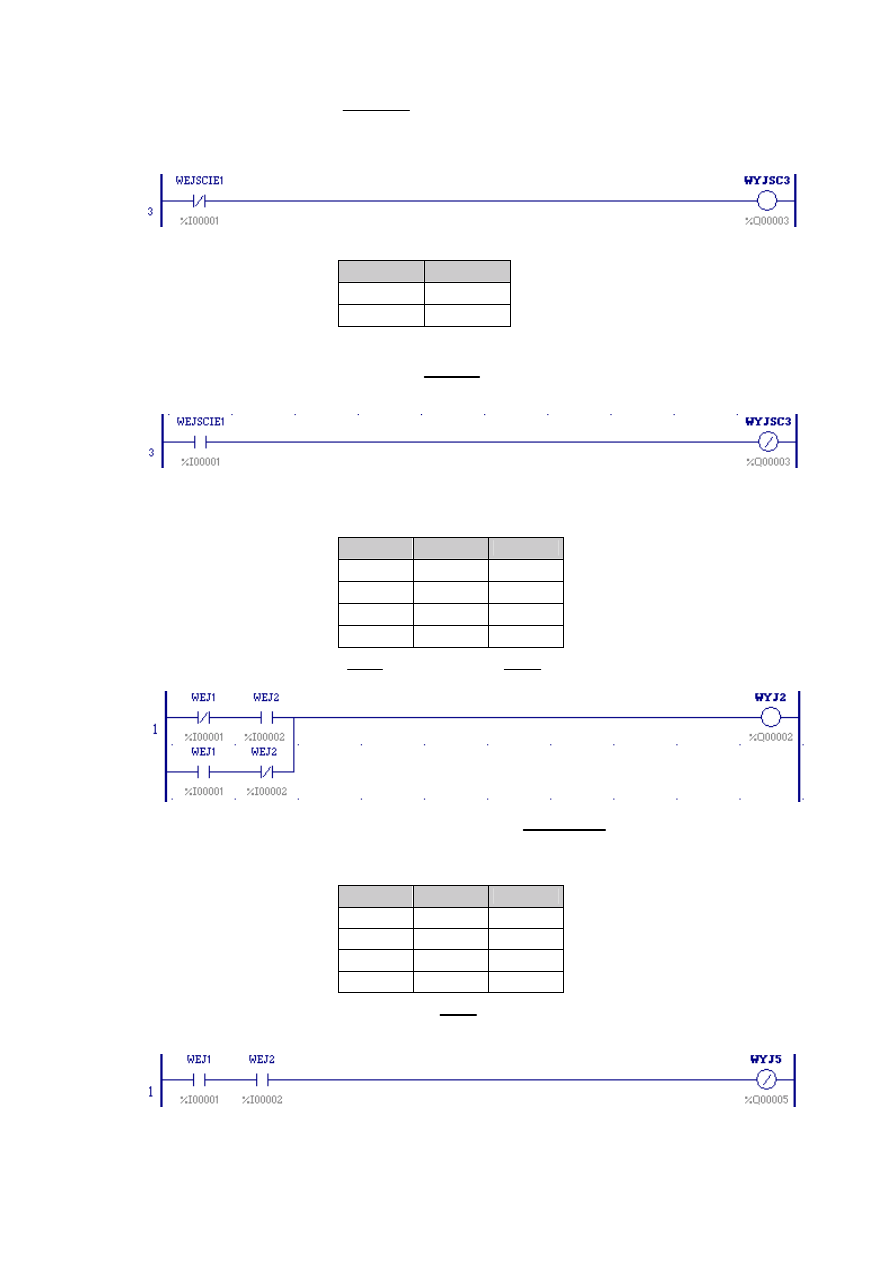
Negacja NOT
WYJSC3
=
WEJSCIE1
Negacj
ę
mo
ż
na zrealizowa
ć
za pomoc
ą
styku normalnie zwartego NCCON:
Tablica prawdy:
WEJSCIE1
WYJSC3
0
1
1
0
lub cewki o stykach normalnie zwartych NCCOIL:
WYJSC3
=
WEJSCIE1
Alternatywa wył
ą
czaj
ą
ca XOR (eXclusive-OR)
WYJ2
WEJ2
WEJ1
=
⊕
Tablica prawdy:
WEJ1
WEJ2
WYJ2
0
0
0
0
1
1
1
0
1
1
1
0
WYJ2
=
)
WEJ2
•
(WEJ1
+
WEJ2)
•
WEJ1
(
Negacja iloczynu logicznego NAND (funkcja Sheffera)
WYJ5
=
WEJ2
•
WEJ1
Tablica prawdy:
WEJ1
WEJ2
WYJ5
0
0
1
0
1
1
1
0
1
1
1
0
WYJ5
=
WEJ2
•
WEJ1
Realizacja układów kombinacyjnych na PLC
Laboratorium Podstaw Automatyki i Regulacji Automatycznej II
3
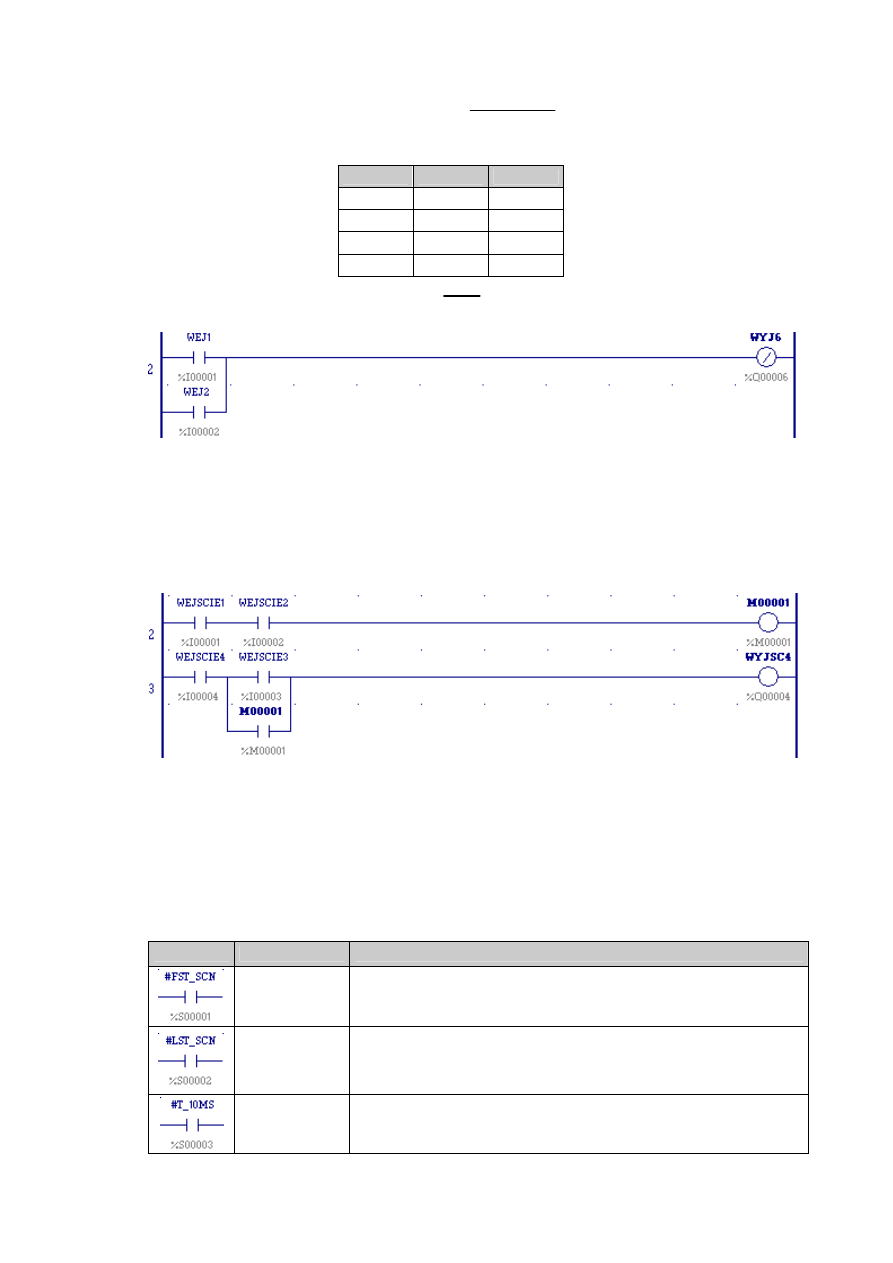
Negacja sumy logicznej NOR (funkcja Peirce’a)
WYJ6
=
WEJ2
WEJ1
+
Tablica prawdy:
WEJ1
WEJ2
WYJ6
0
0
1
0
1
0
1
0
0
1
1
0
WYJ6
=
WEJ2
+
WEJ1
REFERENCJE POMOCNICZE
Do przechowywania po
ś
rednich wyników funkcji logicznych przeznaczonych jest 256 referencji pomocniczych
%T i 1024 lub 4096 referencji %M (w zale
ż
no
ś
ci od modelu procesora). S
ą
to referencje o organizacji
binarnej. Referencje %M mog
ą
pami
ę
ta
ć
swój stan sprzed zaniku napi
ę
cia zasilania (Retentive True) lub
mog
ą
tego stanu nie pami
ę
ta
ć
(Retentive False). Referencje %T nigdy stanu sprzed zaniku napi
ę
cia zasilania
nie pami
ę
taj
ą
(Retentive False).
M00001
=
WEJSCIE2
WEJSCIE1
•
WYJSC4
=
M00001)
+
(WEJSCIE3
•
WEJSCIE4
REFERENCJE SYSTEMOWE
Programista ma równie
ż
do dyspozycji referencje systemowe %S, %S.A., %SB i %SC. Ich nazwy zaczynaj
ą
si
ę
od znaku #. Zmienne %S s
ą
tylko do odczytu (Read-only). W
ś
ród cz
ęś
ciej u
ż
ywanych zmiennych mo
ż
na
wymieni
ć
:
Nazwa
Adres referencji
Opis
%S00001
W pierwszym cyklu programu (First Scan) jest jedynk
ą
, pó
ź
niej cały czas
zerem. U
ż
ywana wówczas, gdy trzeba na pocz
ą
tku programu poustawia
ć
jakie
ś
warto
ś
ci pocz
ą
tkowe.
%S00002
Cały czas w jest jedynk
ą
, z wyj
ą
tkiem ostatniego cyklu programu, gdy
staje si
ę
równa zero. Je
ś
li program zostaje zatrzymany przez kluczyk na
procesorze lub za pomoc
ą
programatora, to wówczas wykonywany jest
jeszcze jeden cykl programu, w którym #LST_SCN jest równy 0.
%S00003
Generator przebiegu prostok
ą
tnego o okresie 10 ms i wypełnieniu ½.
Realizacja układów kombinacyjnych na PLC
4
Laboratorium Podstaw Automatyki i Regulacji Automatycznej II
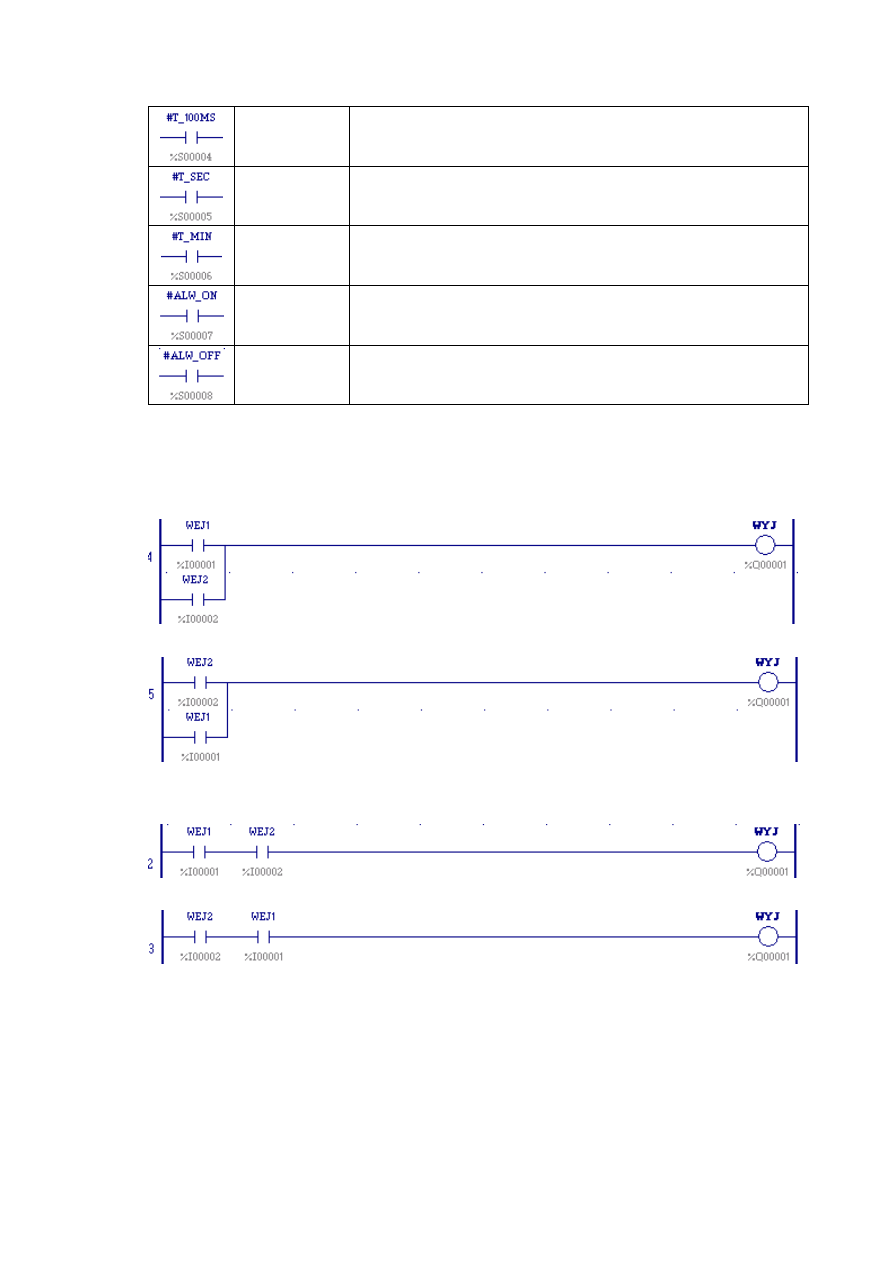
%S00004
Generator przebiegu prostok
ą
tnego o okresie 100 ms i wypełnieniu ½.
%S00005
Generator przebiegu prostok
ą
tnego o okresie 1 s i wypełnieniu ½.
%S00006
Generator przebiegu prostok
ą
tnego o okresie 1 min. i wypełnieniu ½.
%S00007
Stała jedynka (Always On).
%S00008
Stałe zero (Always Off).
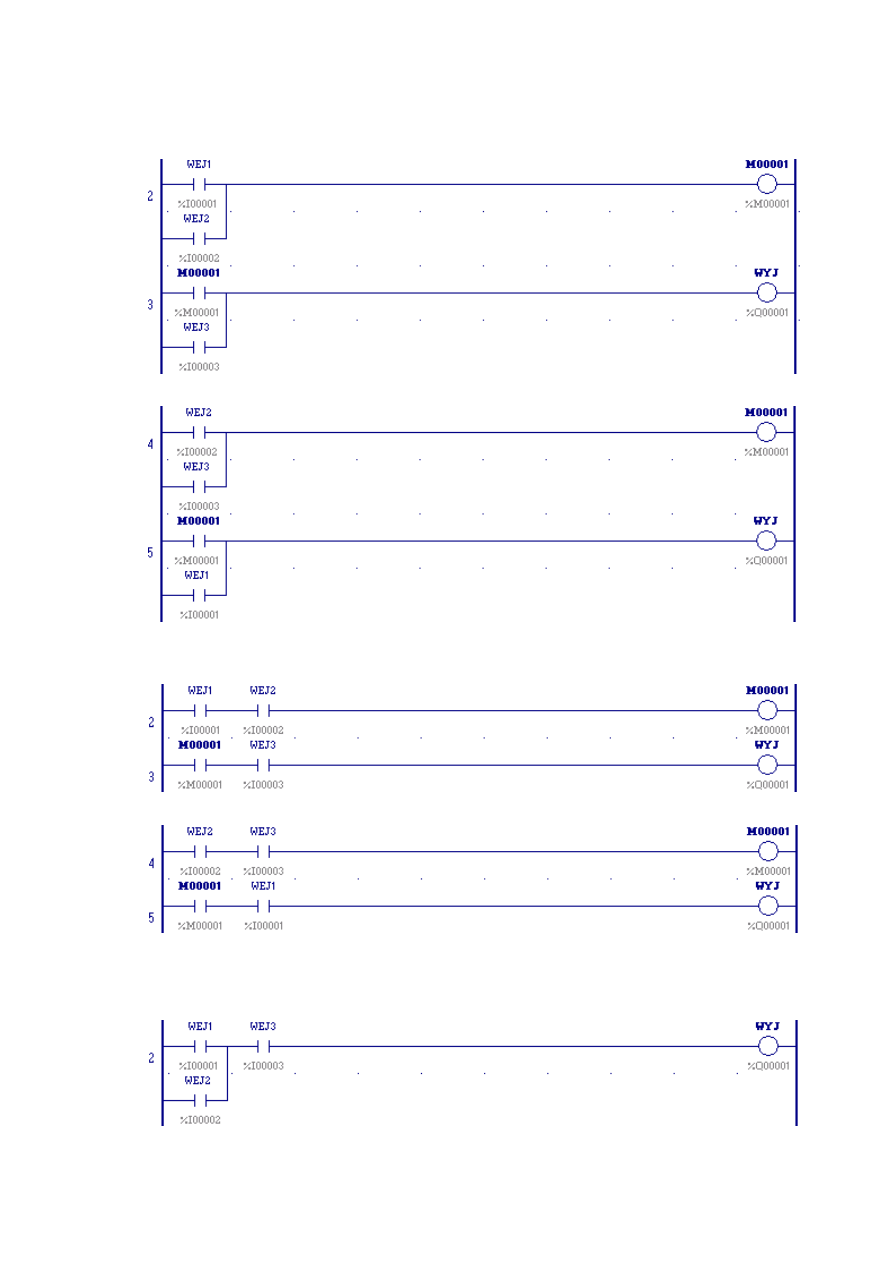
PRAWA ALGEBRY BOOLE’A
Prawo przemienno
ś
ci sumy logicznej
WEJ1
WEJ2
=
WEJ2
+
WEJ1
+
Schemat drabinkowy:
jest równowa
ż
ny schematowi:
Prawo przemienno
ś
ci iloczynu logicznego
WEJ1
WEJ2
=
WEJ2
WEJ1
•
•
Schemat drabinkowy:
jest równowa
ż
ny schematowi:
Realizacja układów kombinacyjnych na PLC
Laboratorium Podstaw Automatyki i Regulacji Automatycznej II
5
Prawo ł
ą
czno
ś
ci sumy logicznej
WEJ3)
+
WEJ2
(
+
WEJ1
=
WEJ3
+
WEJ2)
+
(WEJ1
Schemat drabinkowy:
jest równowa
ż
ny schematowi:
Prawo ł
ą
czno
ś
ci iloczynu logicznego
WEJ3)
WEJ2
WEJ1
=
WEJ3
WEJ2)
(WEJ1
•
•
•
•
(
Schemat drabinkowy:
jest równowa
ż
ny schematowi:
Prawo rozdzielno
ś
ci iloczynu logicznego wzgl
ę
dem sumy logicznej
WEJ3)
WEJ2
WEJ3
WEJ1
=
WEJ3
WEJ2)
+
(WEJ1
•
+
•
•
Schemat drabinkowy:
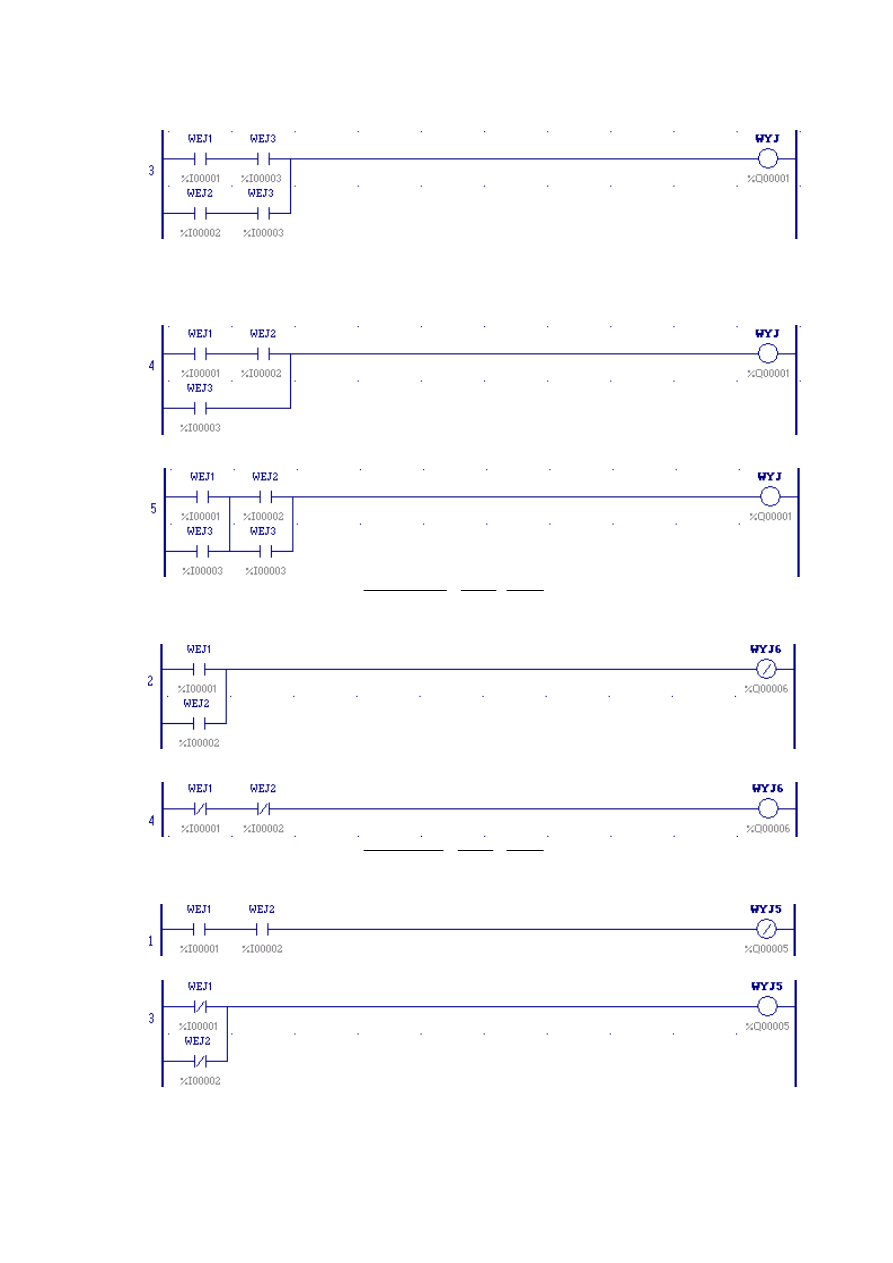
Realizacja układów kombinacyjnych na PLC
6
Laboratorium Podstaw Automatyki i Regulacji Automatycznej II
jest równowa
ż
ny schematowi:
Prawo rozdzielno
ś
ci sumy logicznej wzgl
ę
dem iloczynu logicznego
WEJ3)
+
(WEJ2
•
WEJ3)
+
(WEJ1
=
WEJ3
+
WEJ2)
•
(WEJ1
Schemat drabinkowy:
jest równowa
ż
ny schematowi:
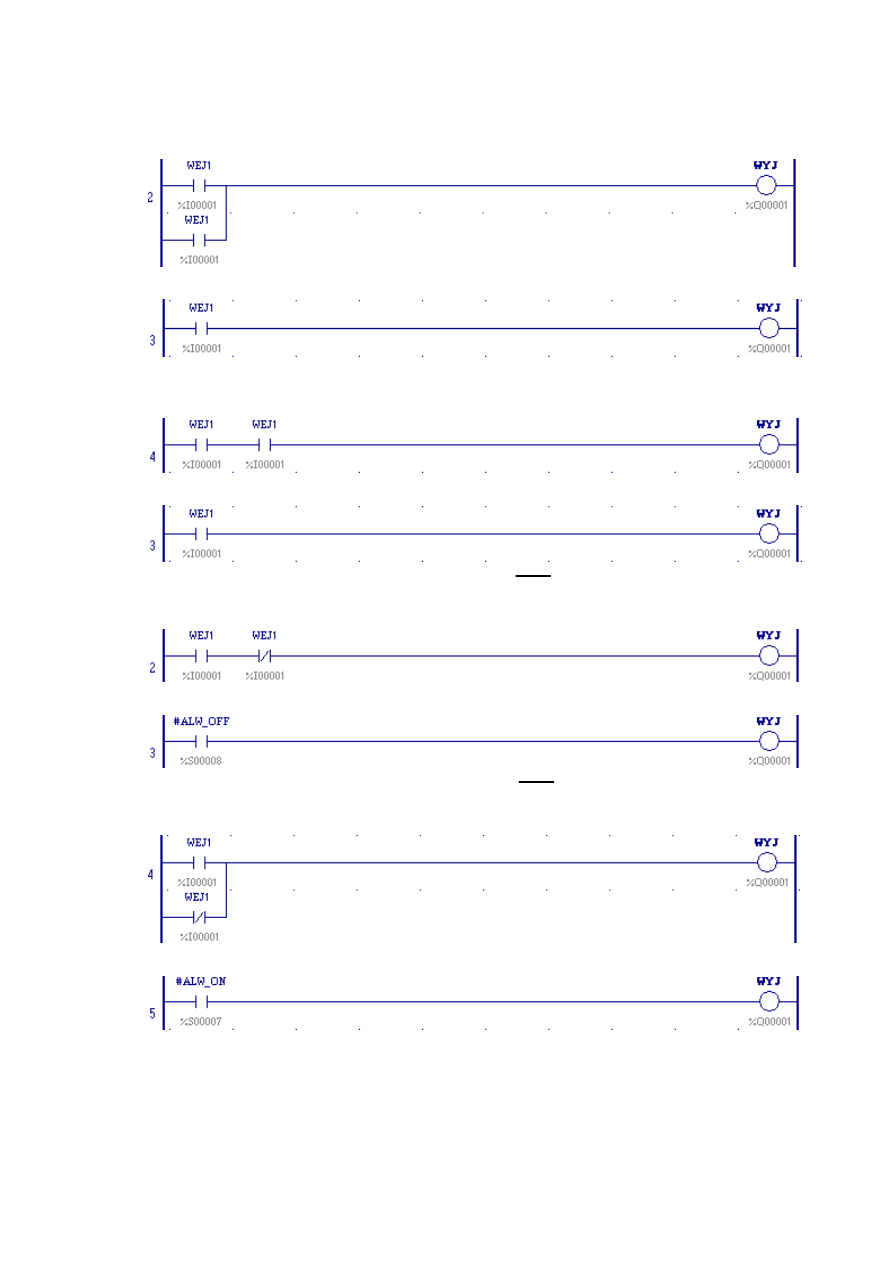
Prawo de Morgana
WEJ2
•
WEJ1
=
2
WEJ
+
1
WEJ
Schemat drabinkowy:
jest równowa
ż
ny schematowi:
Prawo de Morgana
WEJ2
+
WEJ1
=
2
WEJ
•
1
WEJ
Schemat drabinkowy:
jest równowa
ż
ny schematowi:
Realizacja układów kombinacyjnych na PLC
Laboratorium Podstaw Automatyki i Regulacji Automatycznej II
7
Prawo powtórze
ń
sumy logicznej
WEJ1
=
WEJ1
+
WEJ1
Schemat drabinkowy:
jest równowa
ż
ny schematowi:
Prawo powtórze
ń
iloczynu logicznego
WEJ1
=
WEJ1
•
WEJ1
Schemat drabinkowy:
jest równowa
ż
ny schematowi:
Prawo dopełnienia iloczynu logicznego
0
=
WEJ1
•
WEJ1
Schemat drabinkowy:
jest równowa
ż
ny schematowi:
Prawo dopełnienia sumy logicznej
1
=
WEJ1
+
WEJ1
Schemat drabinkowy:
jest równowa
ż
ny schematowi:
Realizacja układów kombinacyjnych na PLC
8
Laboratorium Podstaw Automatyki i Regulacji Automatycznej II
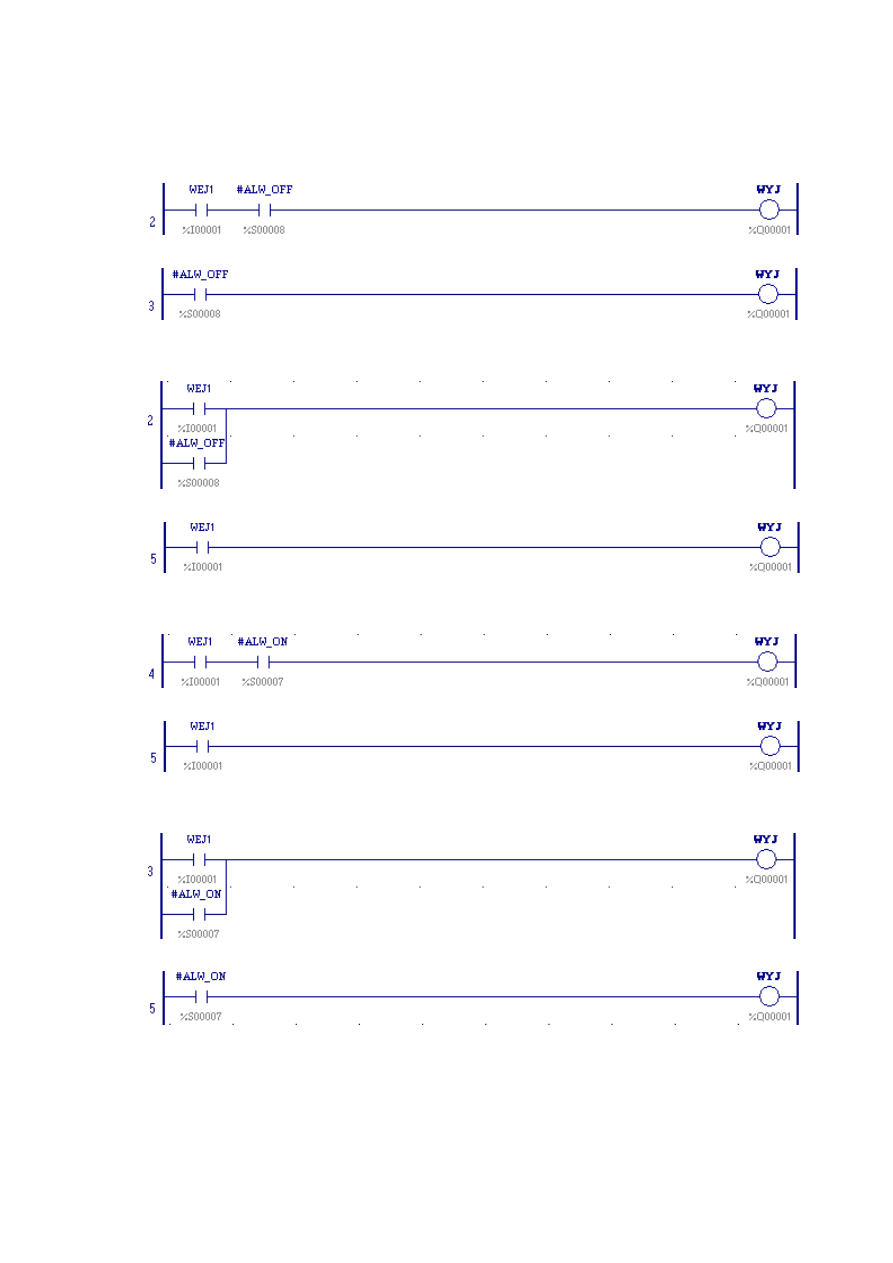
Prawa działania na elementach neutralnych
0
=
0
•
WEJ1
Schemat drabinkowy:
jest równowa
ż
ny schematowi:
WEJ1
=
0
+
WEJ1
Schemat drabinkowy:
jest równowa
ż
ny schematowi:
WEJ1
=
1
•
WEJ1
Schemat drabinkowy:
jest równowa
ż
ny schematowi:
1
=
1
+
WEJ1
Schemat drabinkowy:
jest równowa
ż
ny schematowi:
Realizacja układów kombinacyjnych na PLC
Laboratorium Podstaw Automatyki i Regulacji Automatycznej II
9
Przykład 1.
Napisa
ć
program realizuj
ą
cy cykliczne zał
ą
czanie i wył
ą
czanie wyj
ś
cia o nazwie Kogut z cz
ę
stotliwo
ś
ci
ą
1 Hz
w przypadku, gdy wej
ś
cie Przycisk1 jest zał
ą
czone.
Rozwi
ą
zanie:
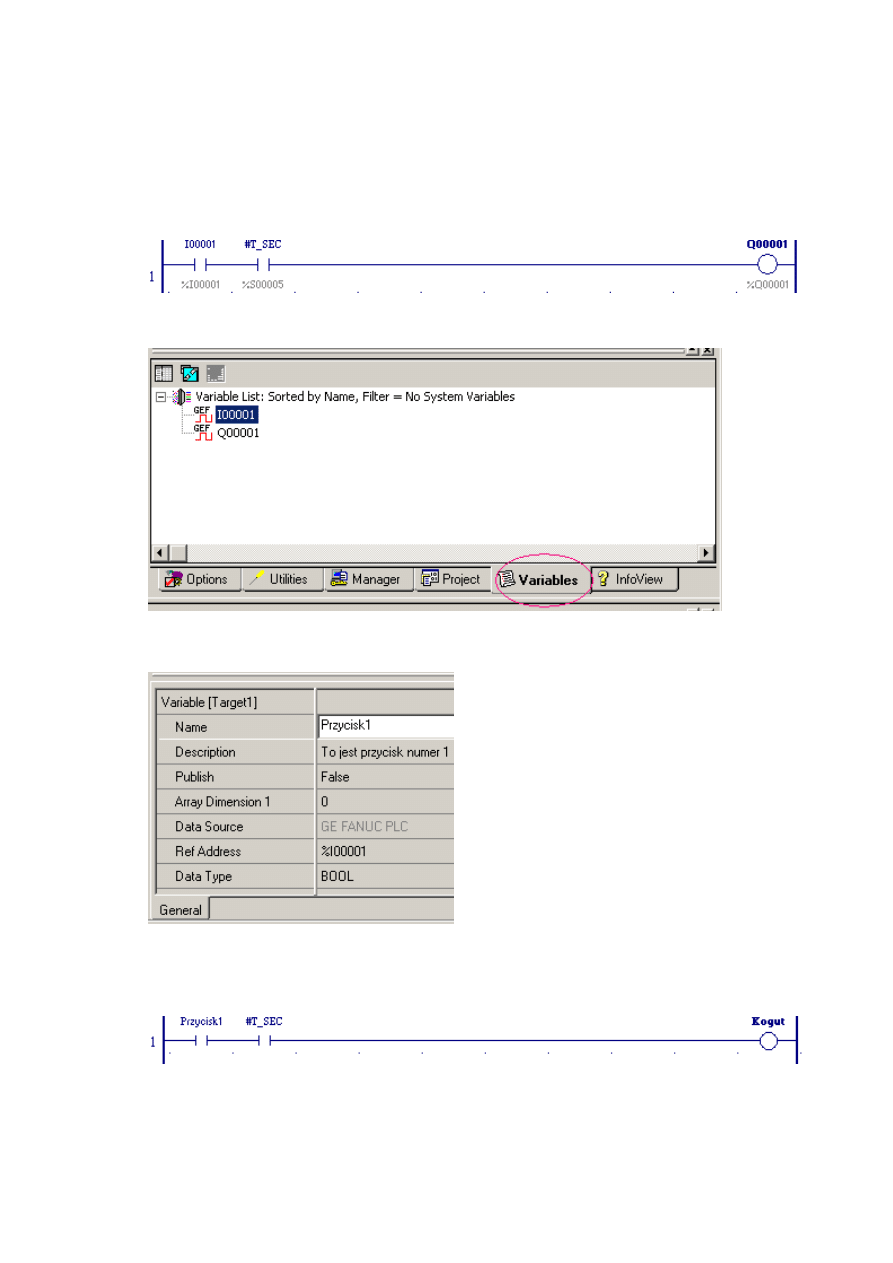
W edytorze Proficy ME Logic Developer PLC nale
ż
y wstawi
ć
nast
ę
puj
ą
cy szczebel (Rung):
W oknie nawigatora nale
ż
y przej
ść
na zakładk
ę
deklaracji nazw zmiennych (Variables) i zadeklarowa
ć
nowe
zmienne:
Nast
ę
pnie zmieni
ć
nazw
ę
zmiennej I00001 na „Przycisk1” oraz zadeklarowa
ć
komentarz „To jest przycisk
numer 1”.
Dla zmiennej Q00001 zadeklarowa
ć
nazw
ę
„Kogut” i opis „Sterowanie lamp
ą
ostrzegawcz
ą
”.
Po tych czynno
ś
ciach nasz program powinien wygl
ą
da
ć
tak (w oknie nawigatora wybra
ć
zakładk
ę
projektu
(Project):
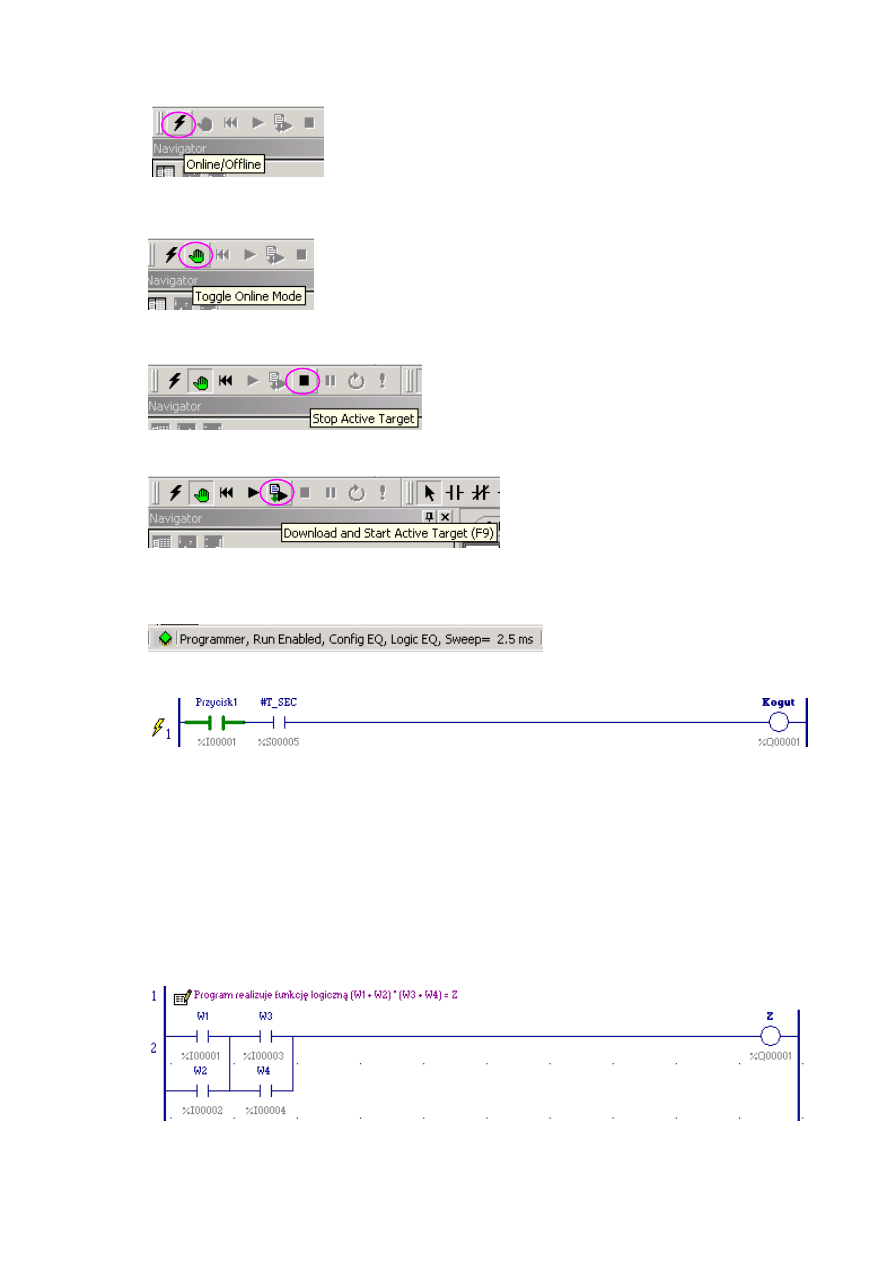
Nawi
ą
za
ć
ł
ą
czno
ść
ze sterownikiem (On-line):
Realizacja układów kombinacyjnych na PLC
10
Laboratorium Podstaw Automatyki i Regulacji Automatycznej II
Nast
ę
pnie nale
ż
y przej
ść
do trybu Programmer:
Przed załadowaniem nowego programu do sterownika nale
ż
y ustawi
ć
sterownik w stan Stop Enabled
lub Stop Disabled:
Aby załadowa
ć
program do sterownika nale
ż
y nacisn
ąć
przycisk:
Chc
ą
c monitorowa
ć
na ekranie komputera program nale
ż
y upewni
ć
si
ę
,
ż
e po prawej stronie na dole ekranu
znajduje si
ę
informacja o zgodno
ś
ci programu w edytorze z programem w sterowniku oraz
ż
e sterownik jest
w stanie Run Enabled:
Styki i przeka
ź
niki, które s
ą
zamkni
ę
te, pod
ś
wietl
ą
si
ę
na zielono:
Przeka
ź
nik o nazwie Kogut zał
ą
cza si
ę
tylko w momentach, gdy zał
ą
czone s
ą
styki Przycisk1 i #T_SEC.
W zadaniu wykorzystano zmienn
ą
#T_SEC, która jest gotow
ą
zmienn
ą
systemow
ą
, generuj
ą
c
ą
fal
ę
prostok
ą
tn
ą
o cz
ę
stotliwo
ś
ci 1 Hz.
Przykład 2.
Napisz program steruj
ą
cy dla czterech wej
ść
dwustanowych W1, W2, W3 i W4 realizuj
ą
cy nast
ę
puj
ą
c
ą
funkcj
ę
logiczn
ą
:
W4)
(W3
•
W2)
(W1
+
+
Wynik operacji ma sterowa
ć
wyj
ś
ciem o nazwie Z.
Rozwi
ą
zanie:
Realizacja układów kombinacyjnych na PLC
Laboratorium Podstaw Automatyki i Regulacji Automatycznej II
11
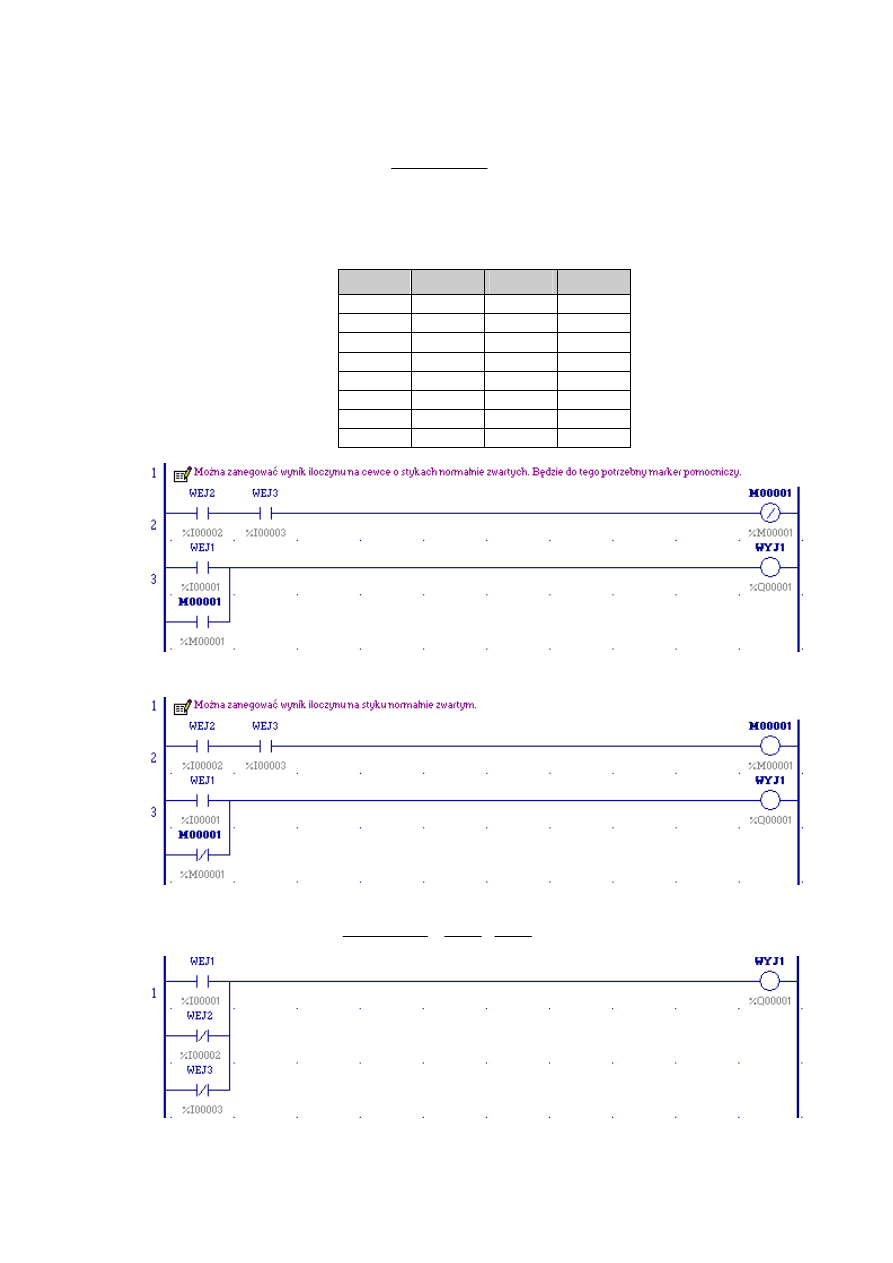
Przykład 3.
Napisz program dla trzech wej
ść
dwustanowych WEJ1, WEJ2 i WEJ3 realizuj
ą
cy nast
ę
puj
ą
c
ą
funkcj
ę
logiczn
ą
:
WEJ3)
•
(WEJ2
+
WEJ1
Wynik operacji ma sterowa
ć
wyj
ś
ciem WYJ1.
Rozwi
ą
zanie:
Tablica zale
ż
no
ś
ci:
WEJ1
WEJ2
WEJ3
WYJ1
0
0
0
1
0
0
1
1
0
1
0
1
0
1
1
0
1
0
0
1
1
0
1
1
1
1
0
1
1
1
1
1
lub
Mo
ż
na skorzysta
ć
z prawa de Morgana:
WEJ3
+
WEJ2
=
WEJ3
•
WEJ2
Realizacja układów kombinacyjnych na PLC
12
Laboratorium Podstaw Automatyki i Regulacji Automatycznej II
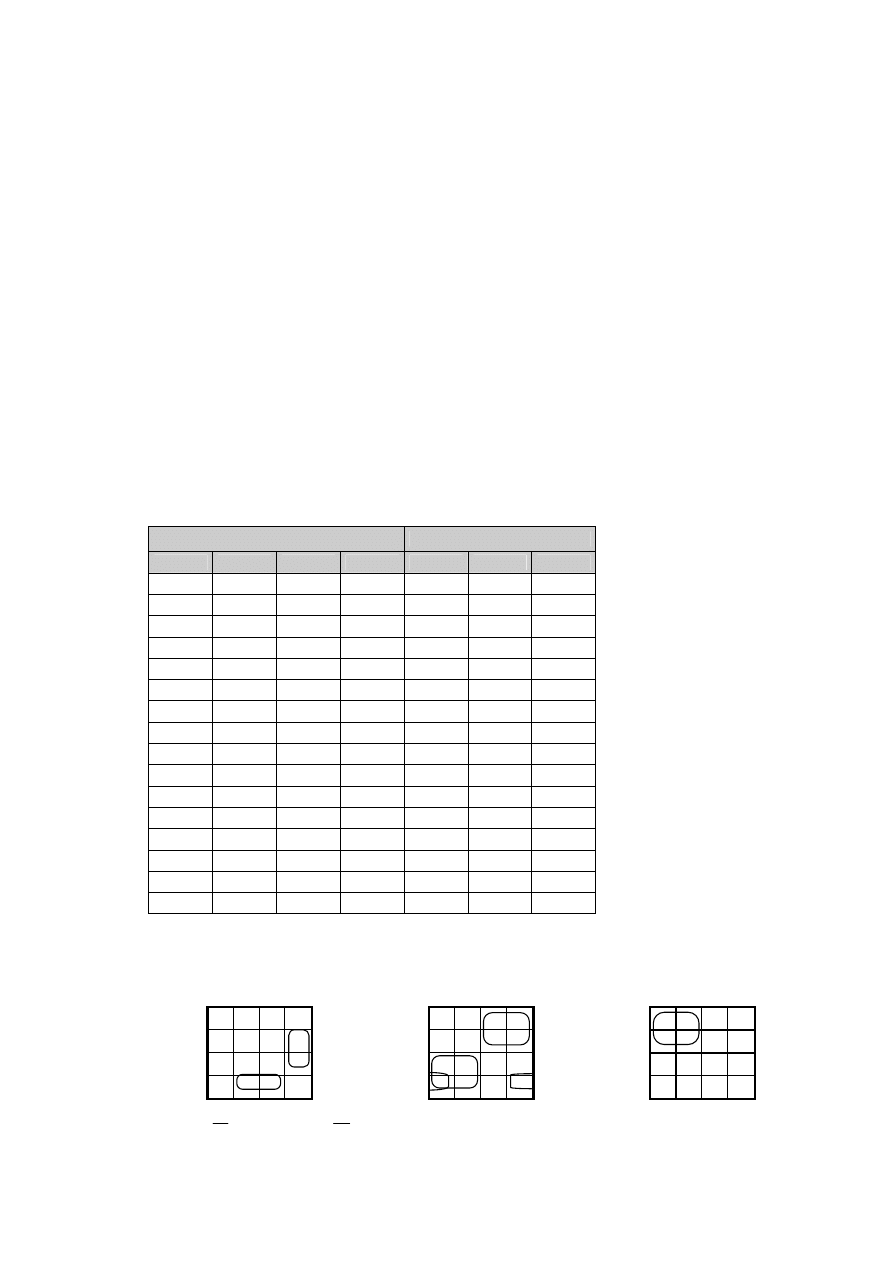
Przykład 4.
Wykonaj syntez
ę
układu automatycznego sterowania pompy zasilaj
ą
cej dwa zbiorniki I i II. Pompa mo
ż
e
pracowa
ć
przy trzech pr
ę
dko
ś
ciach obrotowych n1, n2, n3. Zbiorniki s
ą
opró
ż
niane nierównomiernie, ale
zawsze s
ą
z powrotem automatycznie napełniane za pomoc
ą
pompy.
Ka
ż
dy zbiornik posiada dwa czujniki poziomu cieczy D i G. Czujnik D umieszczony w połowie zbiornika
informuje,
ż
e poziom cieczy w zbiorniku przekracza połow
ę
. Czujnik G umieszczony w górnej cz
ęś
ci zbiornika
informuje,
ż
e zbiornik jest pełny.
Trzy pr
ę
dko
ś
ci obrotowe pompy odpowiadaj
ą
trzem wielko
ś
ciom napełnienia, a mianowicie:
−
je
ż
eli jeden zbiornik jest pełny, a zapełnienie drugiego zbiornika przekracza połow
ę
, to pr
ę
dko
ść
obrotowa wynosi n1;
−
je
ż
eli zapełnienie obydwu zbiorników spadło poni
ż
ej połowy, to pr
ę
dko
ść
obrotowa wynosi n3;
−
gdy obydwa zbiorniki s
ą
pełne, to pompa zostaje wył
ą
czona;
−
w pozostałych przypadkach zapełnienia zbiorników pr
ę
dko
ść
obrotowa wynosi n2.
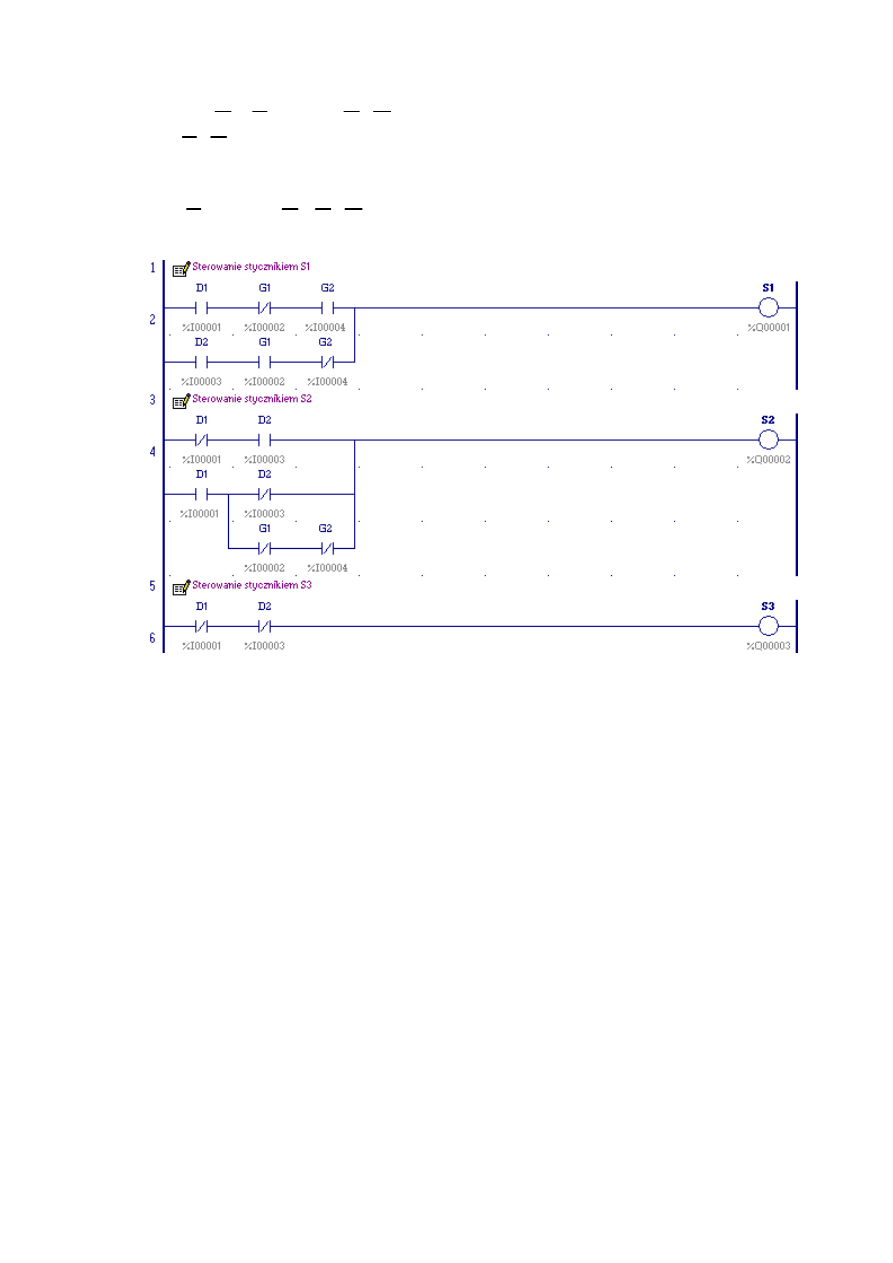
Trzy styczniki S1, S2, S3 steruj
ą
wł
ą
czaniem pompy w sposób zapewniaj
ą
cy uzyskanie jednej z trzech
pr
ę
dko
ś
ci obrotowych n1, n2, n3.
Rozwi
ą
zanie:
W tablicy zale
ż
no
ś
ci stany zaznaczone jako oboj
ę
tne dotycz
ą
nie wyst
ę
puj
ą
cych w trakcie prawidłowej pracy
obiektu stanów wej
ść
. Je
ś
li nie sprecyzowano, jak program ma reagowa
ć
na nieprawidłowe działanie
czujników, to mo
ż
na stany te wykorzysta
ć
wł
ą
czaj
ą
c do grup zerowych lub jedynkowych przy znajdowaniu
minimalnej postaci funkcji za pomoc
ą
siatek Karnaugh’a. Dzi
ę
ki temu uzyskujemy prostsze rozwi
ą
zanie.
Tablica zale
ż
no
ś
ci:
Sygnały wej
ś
ciowe
Sygnały wyj
ś
ciowe
D1
G1
D2
G2
S1
S2
S3
0
0
0
0
0
0
1
I pusty II pusty
0
0
0
1
-
-
-
stan oboj
ę
tny
0
0
1
0
0
1
0
I pusty II pół
0
0
1
1
0
1
0
I pusty II pełny
0
1
0
0
-
-
-
stan oboj
ę
tny
0
1
0
1
-
-
-
stan oboj
ę
tny
0
1
1
0
-
-
-
stan oboj
ę
tny
0
1
1
1
-
-
-
stan oboj
ę
tny
1
0
0
0
0
1
0
I pół
II pusty
1
0
0
1
-
-
-
stan oboj
ę
tny
1
0
1
0
0
1
0
I pół
II pół
1
0
1
1
1
0
0
I pół
II pełny
1
1
0
0
0
1
0
I pełny II pusty
1
1
0
1
-
-
-
stan oboj
ę
tny
1
1
1
0
1
0
0
I pełny II pół
1
1
1
1
0
0
0
I pełny II pełny
Siatki Karnaugha:
D2, G2
D2, G2
D2, G2
D1, G1 00 01 11 10
D1, G1 00 01 11 10
D1, G1 00 01 11 10
00 0
-
0
0
00 0
-
1
1
00 1
-
0
0
01 -
-
-
-
01 -
-
-
-
01 -
-
-
-
11 0
-
0
1
11 1
-
0
0
11 0
-
0
0
10 0
-
1
0
10 1
-
0
1
10 0
-
0
0
S1
S2
S3
)
2
)
G
•
D2
•
(G1
G2
•
G1
•
(D1
S1
+
=
Realizacja układów kombinacyjnych na PLC
Laboratorium Podstaw Automatyki i Regulacji Automatycznej II
13
)
G2
•
G1
•
(D1
+
)
D2
•
D1
(
+
)
D2
•
(D1
=
S2
D2
•
D1
=
S3
Korzystaj
ą
c z prawa rozdzielno
ś
ci iloczynu wzgl
ę
dem sumy mo
ż
emy funkcj
ę
S2 jeszcze troch
ę
upro
ś
ci
ć
:
)))
G2
•
G1
(
+
D2
(
•
(D1
+
)
D2
•
D1
(
=
S2
Program
ć
wiczenia:
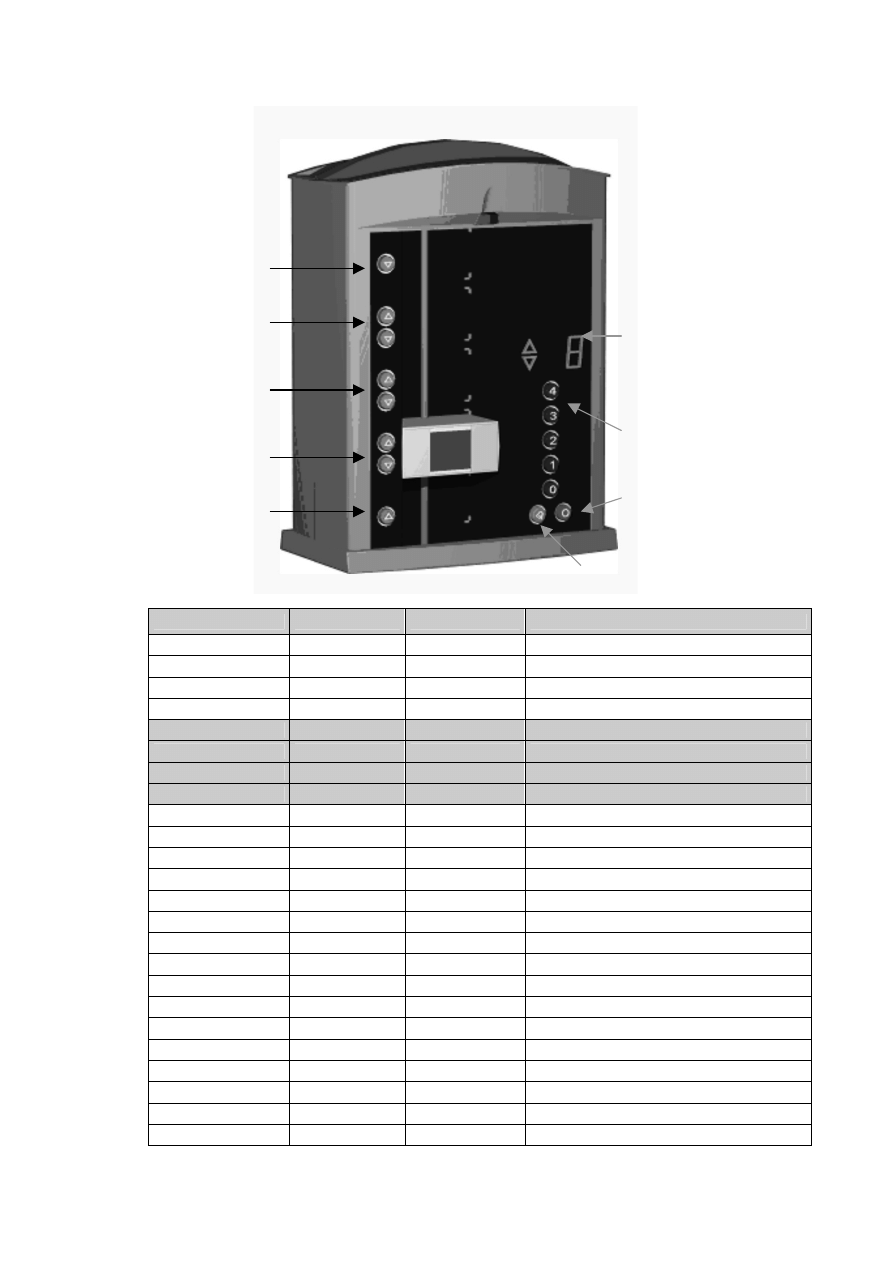
Zad. 1.
Zaprojektowa
ć
układ sterowania modelem d
ź
wigu osobowego. List
ę
sygnałów steruj
ą
cych przedstawiono
poni
ż
ej. Nale
ż
y wykorzysta
ć
sygnały zaznaczone w tabeli szarym kolorem. Sygnał WOLNO=1 powoduje
uruchomienie wolnego ruchu kabiny, a o kierunku ruchu decyduje sygnał przeł
ą
czaj
ą
cy W_GORE. Je
ś
li
W_GORE=1 i WOLNO=1, to kabina jedzie wolno w gór
ę
, je
ś
li W_GORE=0 i WOLNO=1, to kabina jedzie
wolno w dół. Analogicznie sygnał SZYBKO=1 powoduje uruchomienie szybkiego ruchu kabiny. Przycisk
niestabilny P1_DOL ma uruchamia
ć
wolny ruch windy w dół, przycisk P1_GORA ma uruchamia
ć
wolny ruch
windy w gór
ę
. Przyciski P2_DOL i P2_GORA maj
ą
uruchamia
ć
odpowiednio szybki ruch windy w dół i w gór
ę
.
Ruch windy ma trwa
ć
tylko w czasie naciskania przycisków. Program powinien mie
ć
zabezpieczenie przed
jednoczesnym naciskaniem przycisków – wówczas nale
ż
y wł
ą
czy
ć
alarm optyczny i d
ź
wi
ę
kowy (GLOSNIK=1)
i wył
ą
czy
ć
ruch windy. Zało
ż
y
ć
tablic
ę
podgl
ą
du stanów zmiennych Data Watch pami
ę
tan
ą
w projekcie i przy
jej pomocy przetestowa
ć
program na swoim stanowisku. Nast
ę
pnie przesła
ć
program do sterownika na
stanowisku modelu d
ź
wigu osobowego (IP 10.10.43.21) i sprawdzi
ć
na nim działanie programu.
Realizacja układów kombinacyjnych na PLC
14
Laboratorium Podstaw Automatyki i Regulacji Automatycznej II
Przycisk poziom 0
przywołanie w gór
ę
Przyciski
żą
dania
poziomów
Przycisk poziom 4
przywołanie w dół
Przyciski poziom 3
przywołanie w
gór
ę
i w dół
Przycisk ALARM
Przycisk STOP
Wy
ś
wietlacz
7-segmentowy
Przyciski poziom 2
przywołanie w
gór
ę
i w dół
Przyciski poziom 1
przywołanie w
gór
ę
i w dół
IC200MDD844 slot 1 Adres referencji Nazwa zmiennej
Opis zmiennej
A1
%Q00001
H_P0_GORA
Pod
ś
w. Przycisku poz. 0 przywołanie w gór
ę
A2
%Q00002
H_P4_DOL
Pod
ś
w. Przycisku poz. 4 przywołanie w dół
A3
%Q00003
H_STOP
Pod
ś
wietlenie przycisku STOP
A4
%Q00004
H_ALARM
Pod
ś
wietlenie przycisku ALARM
A5
%Q00005
GLOSNIK
Alarm optyczny i d
ź
wi
ę
kowy
A6
%Q00006
W_GORE
Kierunek ruchu kabiny (1 – w gór
ę
)
A7
%Q00007
SZYBKO
Szybki ruch kabiny
A8
%Q00008
WOLNO
Wolny ruch kabiny
A9
%Q00009
H_W_DOL
Wska
ź
nik ruchu kabiny w dół
A10
%Q00010
H_W_GÓRE
Wska
ź
nik ruchu kabiny w gór
ę
A11
%Q00011
OTW_DRZWI
Otwarcie drzwi kabiny (1 – otwórz)
A12
%Q00012
H_BCD1
Wy
ś
wietlacz 7-seg. – negacja BCD1
A13
%Q00013
H_BCD2
Wy
ś
wietlacz 7-seg. – negacja BCD2
A14
%Q00014
H_BCD4
Wy
ś
wietlacz 7-seg. – negacja BCD4
A15
%Q00015
H_BCD8
Wy
ś
wietlacz 7-seg. – negacja BCD8
A16
%Q00016
ZNACZNIKI
Znaczniki poziomów
B1
%I00001
P0_GORA
Przycisk poziom 0 przywołanie w gór
ę
B2
%I00002
P4_DOL
Przycisk poziom 4 przywołanie w dół
B3
%I00003
STOP
Przycisk STOP
B4
%I00004
ALARM
Przycisk ALARM
B5
%I00005
CZ_OTW
Czujnik drzwi otwarte
B6
%I00006
CZ_ZAM
Czujnik drzwi zamkni
ę
te
B7
%I00007
CZUJ_0_5
Czujnik dojechania na poziom 0.5
B8
%I00008
CZUJ_0
Czujnik dojechania na poziom 0
Realizacja układów kombinacyjnych na PLC
Laboratorium Podstaw Automatyki i Regulacji Automatycznej II
15
B9
%I00009
CZUJ_3_5
Czujnik dojechania na poziom 3.5
B10
%I00010
CZUJ_4
Czujnik dojechania na poziom 4
B11
%I00011
CZUJ_1_5
Czujnik dojechania na poziom 1.5
B12
%I00012
CZUJ_1
Czujnik dojechania na poziom 1
B13
%I00013
CZUJ_2_5
Czujnik dojechania na poziom 2.5
B14
%I00014
CZUJ_2
Czujnik dojechania na poziom 2
B15
%I00015
CZUJ_3
Czujnik dojechania na poziom 3
IC200MDD844 slot 2 Adres referencji Nazwa zmiennej
Opis zmiennej
A1
%Q00017
H_P1_DOL
Pod
ś
w. Przycisku poz. 1 przywołanie w dół
A2
%Q00018
H_P1_GORA
Pod
ś
w. Przycisku poz. 1 przywołanie w gór
ę
A3
%Q00019
H_P2_DOL
Pod
ś
w. Przycisku poz. 2 przywołanie w dół
A4
%Q00020
H_P2_GORA
Pod
ś
w. Przycisku poz. 2 przywołanie w gór
ę
A5
%Q00021
H_P3_DOL
Pod
ś
w. Przycisku poz. 3 przywołanie w dół
A6
%Q00022
H_P3_GORA
Pod
ś
w. Przycisku poz. 3 przywołanie w gór
ę
A7
%Q00023
H_POZ_0
Pod
ś
wietlenie przycisku
żą
danie poziomu 0
A8
%Q00024
H_POZ_1
Pod
ś
wietlenie przycisku
żą
danie poziomu 1
A9
%Q00025
H_POZ_2
Pod
ś
wietlenie przycisku
żą
danie poziomu 2
A10
%Q00026
H_POZ_3
Pod
ś
wietlenie przycisku
żą
danie poziomu 3
A11
%Q00027
H_POZ_4
Pod
ś
wietlenie przycisku
żą
danie poziomu 4
B1
%I00017
P1_DOL
Przycisk poziom 1 przywołanie w dół
B2
%I00018
P1_GORA
Przycisk poziom 1 przywołanie w gór
ę
B3
%I00019
P2_DOL
Przycisk poziom 2 przywołanie w dół
B4
%I00020
P2_GORA
Przycisk poziom 2 przywołanie w gór
ę
B5
%I00021
P3_DOL
Przycisk poziom 3 przywołanie w dół
B6
%I00022
P3_GORA
Przycisk poziom 3 przywołanie w gór
ę
B7
%I00023
POZ_0
Przycisk
żą
danie poziomu 0
B8
%I00024
POZ_1
Przycisk
żą
danie poziomu 1
B9
%I00025
POZ_2
Przycisk
żą
danie poziomu 2
B10
%I00026
POZ_3
Przycisk
żą
danie poziomu 3
B11
%I00027
POZ_4
Przycisk
żą
danie poziomu 4
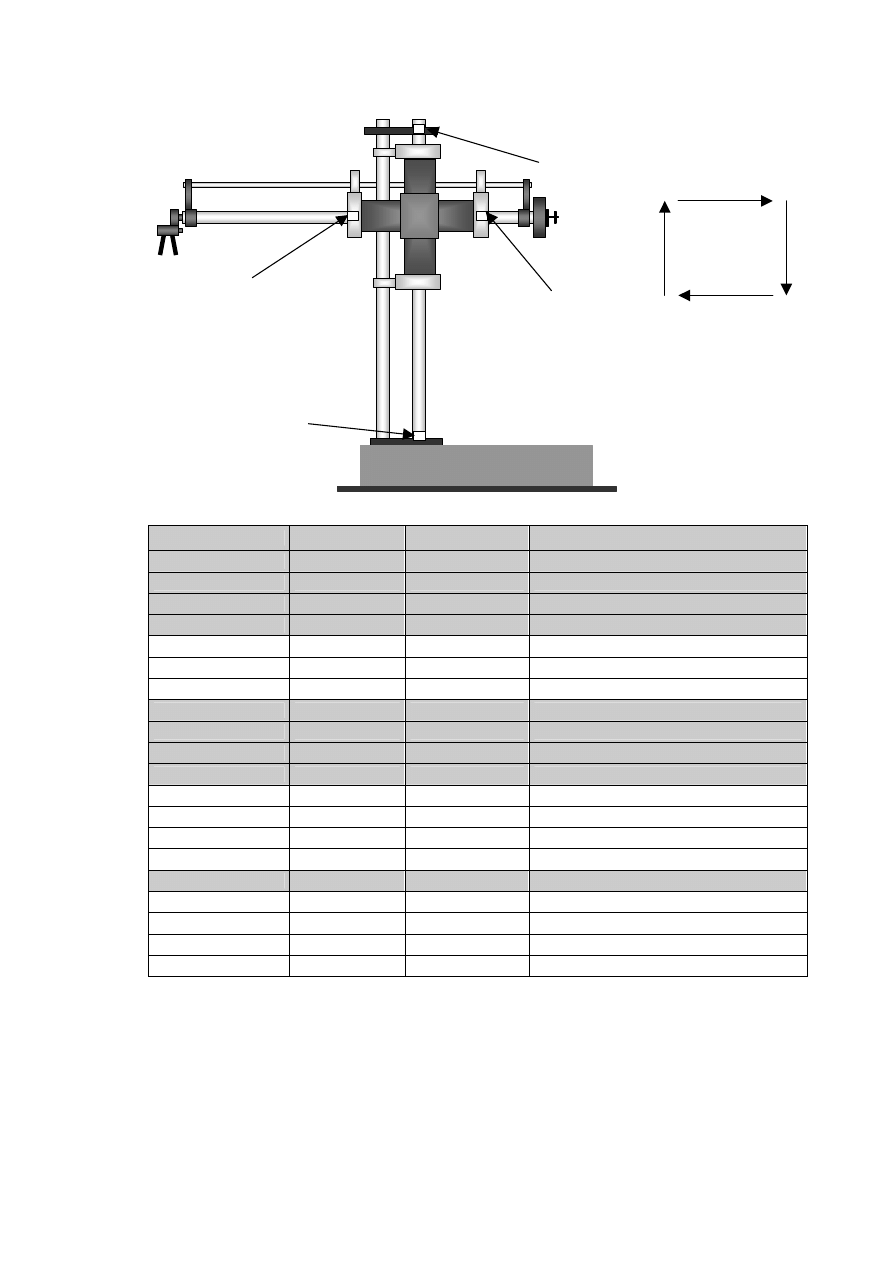
Zad. 2.
Zaprojektowa
ć
układ automatycznego sterowania ruchem manipulatora. List
ę
sygnałów steruj
ą
cych
przedstawiono poni
ż
ej. Nale
ż
y wykorzysta
ć
sygnały zaznaczone w tabeli szarym kolorem. Je
ś
li zał
ą
czony jest
przycisk stabilny ZAL (ZAL=1), to rami
ę
wykonuje ruch najpierw w lewo, potem w gór
ę
, w prawo i w dół. Je
ś
li
ZAL=0, to manipulator nie wykonuje
ż
adnego ruchu. Ruchem manipulatora steruj
ą
wyj
ś
cia o nazwach
W_PRAWO, W_LEWO, W_GORE i W_DOL. Prawe poło
ż
enie ramienia zako
ń
czonego chwytakiem wykrywa
czujnik ko
ń
ca KR_P, lewe poło
ż
enie wykrywa czujnik ko
ń
ca KR_L, dolne poło
ż
enie wykrywa czujnik ko
ń
ca
KR_D, a górne KR_G. Zało
ż
y
ć
tablic
ę
podgl
ą
du stanów zmiennych Data Watch pami
ę
tan
ą
w projekcie i przy
jej pomocy przetestowa
ć
program na swoim stanowisku. Nast
ę
pnie przesła
ć
program do sterownika na
stanowisku manipulatora (adres IP:10.10.43.20) i sprawdzi
ć
na nim działanie programu.
Realizacja układów kombinacyjnych na PLC
16
Laboratorium Podstaw Automatyki i Regulacji Automatycznej II
KR_G
KR_D
KR_L
KR_P
IC200MDD845 slot 1 Adres referencji
Nazwa zmiennej
Opis zmiennej
A1
%Q00001
W_GORE
ruch ramienia w gór
ę
A3
%Q00002
W_DOL
ruch ramienia w dół
A5
%Q00003
W_PRAWO
ruch ramienia w prawo
A7
%Q00004
W_LEWO
ruch ramienia w lewo
A9
%Q00005
CHWYTAK
zamkni
ę
cie chwytaka
A13
%Q00007
LED_ZIEL
dioda LED zielona
A15
%Q00008
LED_CZ
dioda LED czerwona
B1
%I00001
KR_D
dolny czujnik ko
ń
ca
B2
%I00002
KR_G
górny czujnik ko
ń
ca
B3
%I00003
KR_L
lewy czujnik ko
ń
ca
B4
%I00004
KR_P
prawy czujnik ko
ń
ca
B5
%I00005
KR_O
czujnik otwarcia chwytaka
B6
%I00006
KR_Z
czujnik zamkni
ę
cia chwytaka
B10
%I00010
START
przycisk L1
B11
%I00011
STOP
przycisk L2
B12
%I00012
ZAL
przycisk L3
B13
%I00013
przycisk L4
B14
%I00014
przycisk L5
B15
%I00015
przycisk L6
B16
%I00016
przycisk L7
Wymagana wiedza:
-
prawa algebry Boole’a, funkcje logiczne AND, OR, NOT, XOR, NAND, NOR,
-
metody syntezy układów kombinacyjnych,
-
metody programowania sterowników PLC (norma IEC61131-3) – j
ę
zyk stykowo-przeka
ź
nikowy,
-
podstawy obsługi oprogramowania narz
ę
dziowego Proficy ME Logic Developer PLC.

Realizacja układów kombinacyjnych na PLC
Laboratorium Podstaw Automatyki i Regulacji Automatycznej II
17
Warunek zaliczenia:
-
obecno
ść
na zaj
ę
ciach,
-
wykazanie si
ę
wymagan
ą
wiedz
ą
w trakcie
ć
wicze
ń
,
-
wykonanie zada
ń
według instrukcji. Ka
ż
dy program powinien znajdowa
ć
si
ę
w oddzielnym projekcie
o nazwie: T2_X_ZZ (X – nr zadania, ZZ – nr sekcji). Ka
ż
dy projekt powinien zawiera
ć
konfiguracj
ę
zgodn
ą
ze sprz
ę
tem znajduj
ą
cym si
ę
na stanowisku. Konfiguracja sterownika powinna posiada
ć
adresy
referencji dwustanowych zaczynaj
ą
ce si
ę
od numeru referencji wyliczanego ze wzoru:
nr sekcji * 8 – 7
oraz adresy referencji analogowych zaczynaj
ą
ce si
ę
od numeru sekcji. Wszystkie zmienne powinny mie
ć
zadeklarowane nazwy krótkie (Name) i opisowe (Description) zgodne z tre
ś
ci
ą
zadania. Ka
ż
dy program
powinien posiada
ć
komentarz (Comment) zawieraj
ą
cy przynajmniej dwa akapity.
-
sporz
ą
dzenie sprawozdania z
ć
wiczenia – sprawozdanie powinno zawiera
ć
opis wykonanych
ć
wicze
ń
,
tablice prawdy, schematy drabinkowe programów, podpisan
ą
dyskietk
ę
(numer
ć
wiczenia, nr sekcji,
nazwiska członków sekcji) zawieraj
ą
c
ą
backup’y projektów.
-
pozytywne zaliczenie sprawozdania,
-
uzyskanie pozytywnej oceny z ustnej lub pisemnej odpowiedzi na pytania kontrolne.
Termin zło
ż
enia sprawozdania:
-
2 tygodnie od daty
ć
wiczenia
Literatura:
[1] Maczy
ń
ski A. Sterowniki programowalne PLC. Budowa systemu i podstawy programowania.
Astor, Kraków 2002.
[2] Oprogramowanie Proficy Machine Edition. Logic Developer PLC - pakiet do programowania sterowników
GE Fanuc. Pierwsze kroki. Astor Kraków.
[3] Sterowniki serii VersaMax. Podr
ę
cznik u
ż
ytkownika. Astor Kraków 2001.
[4] Sterowniki serii VersaMax Micro/Nano. Podr
ę
cznik u
ż
ytkownika. Astor Kraków.
[5] PN-EN 61131-3: 1998 Sterowniki programowalne. J
ę
zyki programowania.
[6] Legierski T., Kasprzyk J., Wyrwał J., Hajda J., Programowanie sterowników PLC, Wydawnictwo Pracowni
Komputerowej Jacka Skalmierskiego, Gliwice 1998.
[7] Praca zbiorowa pod redakcj
ą
H. Małysiaka. Teoria automatów cyfrowych – laboratorium. Wydawnictwo
Politechniki
Ś
l
ą
skiej. Gliwice 2001.
[8] Praca zbiorowa pod red. H. Małysiaka i B. Pochopienia. Układy cyfrowe – zadania. Wydawnictwo
Politechniki
Ś
l
ą
skiej, Gliwice 2002.
[9] H. Kamionka-Mikuła, H. Małysiak, B. Pochopie
ń
. Układy cyfrowe – teoria i przykłady. Wydawnictwo
Pracowni Komputerowej Jacka Skalmierskiego, Gliwice 2003, wyd. V uzupełnione.
[10] Praca zbiorowa pod redakcj
ą
J. Siwi
ń
skiego i H. Małysiaka. Zbiór zada
ń
z układów przeł
ą
czaj
ą
cych.
Wydawnictwo Politechniki
Ś
l
ą
skiej, Gliwice 1997, Wydanie V.
Wyszukiwarka
Podobne podstrony:
więcej podobnych podstron