Jacek Kabziński
Automatyka i sterowanie
————————————————————————————————————————
2
Automatyka i sterowanie 9 Sterowanie forsujące
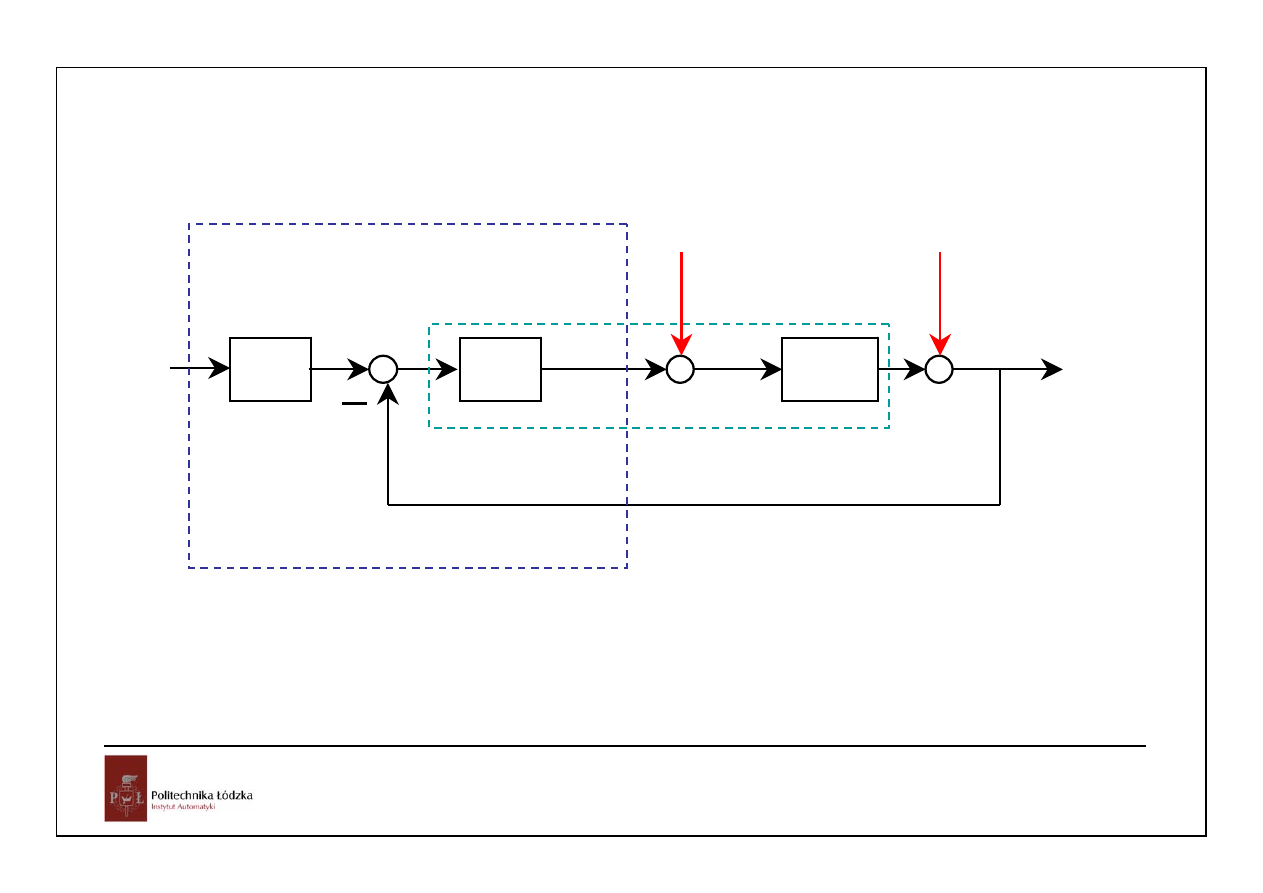
Układy czasu ciągłego
C(s)
P(s)
D(s)
R(s)
Y(s)
E(s)
U(s)
regulator
obiekt
N(s)
F(s)
v(s)
n(s)
F(s)=1 – sprz. od uchybu
3
Automatyka i sterowanie 9 Sterowanie forsujące
Układy czasu ciągłego
6 transmitancji:
YN
T
,
YD
T
,
YR
T
;
N
PC
D
PC
P
R
PC
FPC
Y
+
+
+
+
+
=
1
1
1
1
,
N
PC
PC
D
PC
P
R
PC
FPC
n
+
−
+
+
+
+
=
1
1
1
,
N
PC
C
D
PC
R
PC
FC
v
+
−
+
+
+
+
=
1
1
1
1
,
UN
T
,
UD
T
,
UR
T
:
N
PC
C
D
PC
PC
R
PC
FC
U
+
−
+
+
−
+
+
=
1
1
1
,
N
PC
D
PC
P
R
PC
F
E
+
−
+
+
−
+
+
=
1
1
1
1
Na sygnał zadający
Na szum pomiarowy
Na zakłócenie
P(s)C(s) Transmitancja układu otwartego
1
1
S( s )
P( s )C( s )
=
+
funkcja wrażliwości
1
YR
S( s ) T ( s )
+
=
4
Automatyka i sterowanie 9 Sterowanie forsujące
Układy czasu ciągłego
Poszukamy innych konfiguracji układu, które pozwolą:
• Usunąć wpływ mierzalnych zakłóceń
• Poprawić odpowiedź na sygnał zadający
• Nie pogarszają stabilności
• Mogą być łączone ze sprzężeniem zwrotnym
Ale wymagają dokładnych modeli obiektu
5
Automatyka i sterowanie 9 Sterowanie forsujące
Układy czasu ciągłego
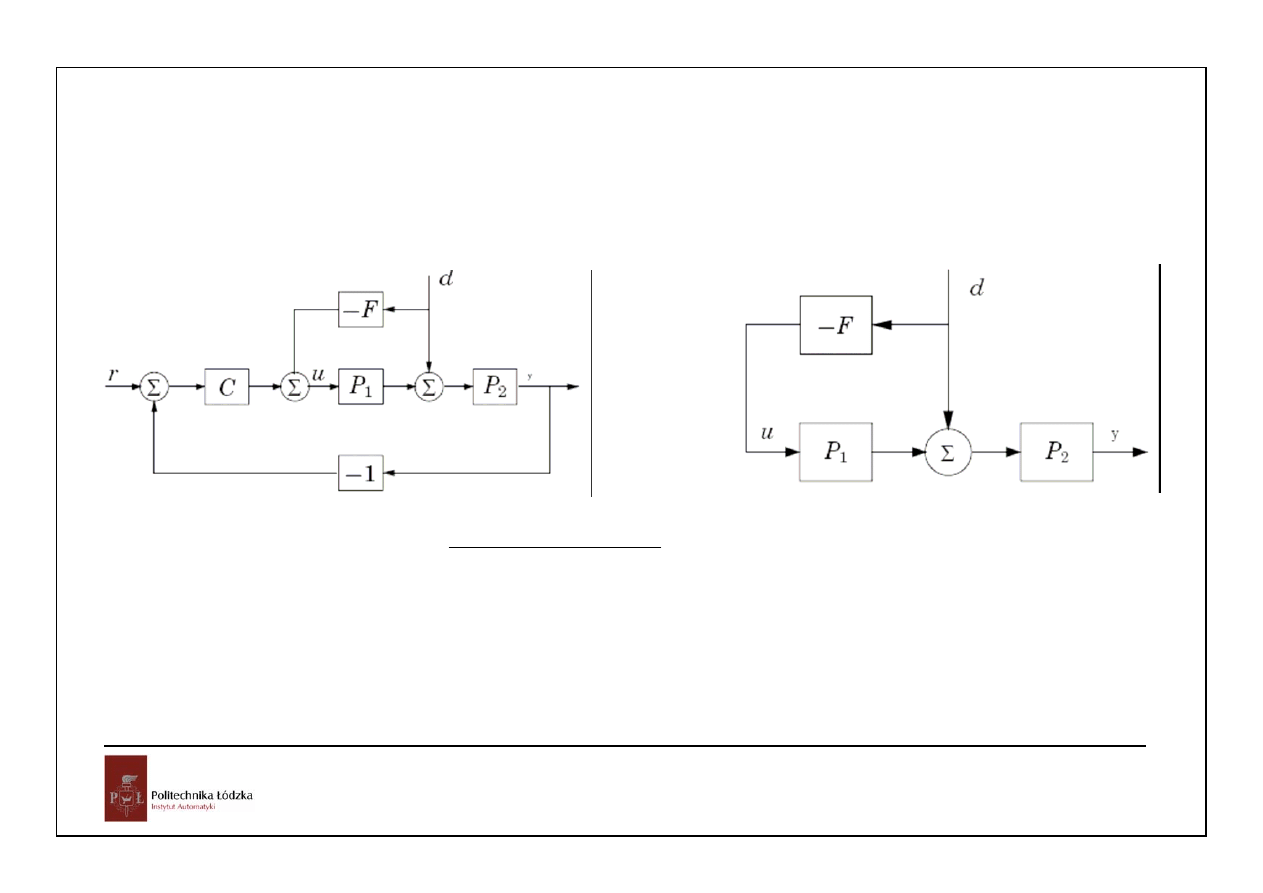
Usunąć wpływ mierzalnych zakłóceń Jeżeli
1
1
F( s ) P ( s )
−
=
to wpływ zakłócenia znika
(
)
1
2
1
2
1
1
1
yd
T ( s )
F( s )P ( s ) P ( s )
C( s )P ( s )P ( s )
= −
+
(
)
1
2
1
yd
T ( s )
F( s )P ( s ) P ( s )
= −
mniejsza wrażliwość na zmiany obiektu
Jak znaleźć realizowalną odwrotność P
1
(s) ( nazwijmy ją X(s))?
1
V ( s ) X ( s )P ( s )U( s )
=
, v(t) musi być bliskie u(t),
(
)
2
0
J
v( t ) u( t ) dt
min
∞
=
−
→
∫
6
Automatyka i sterowanie 9 Sterowanie forsujące
Układy czasu ciągłego
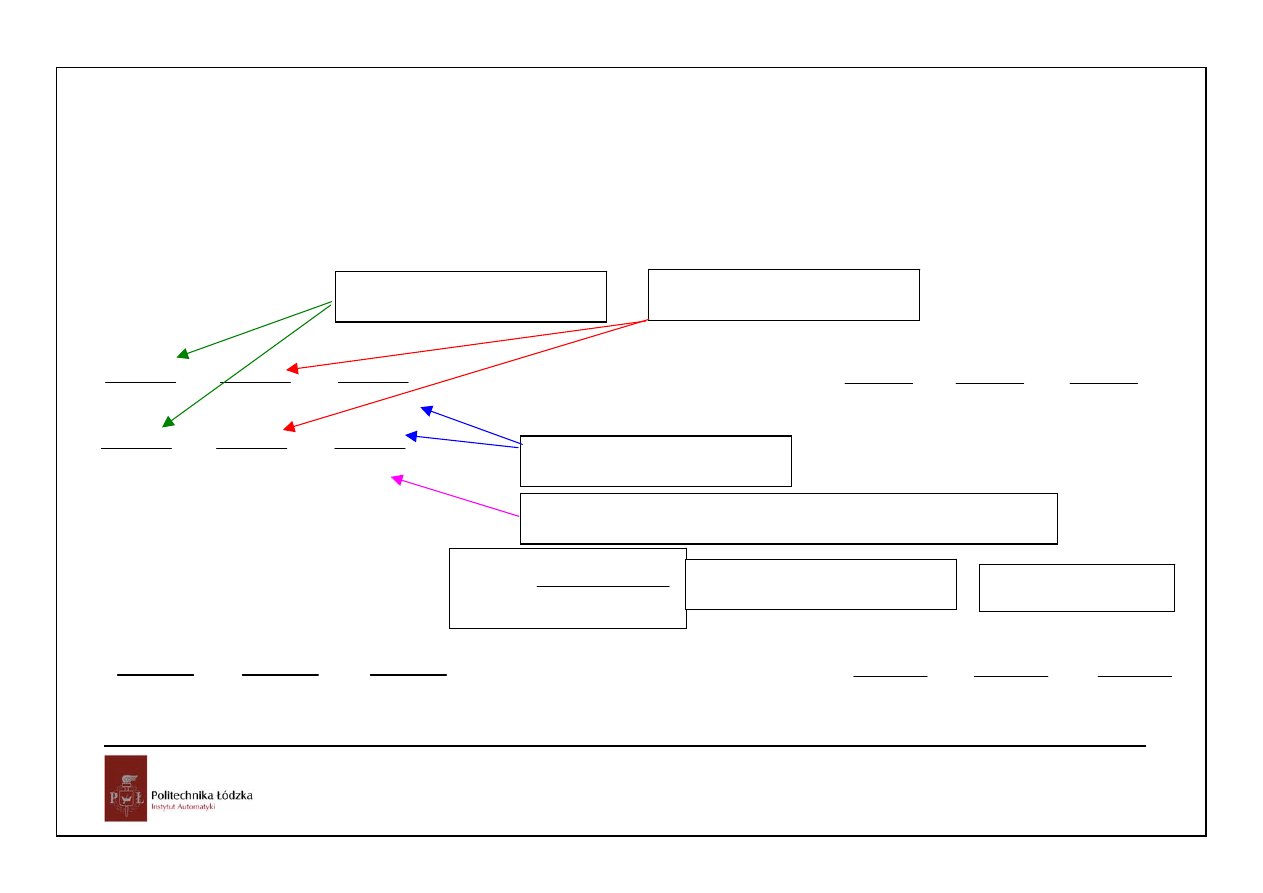
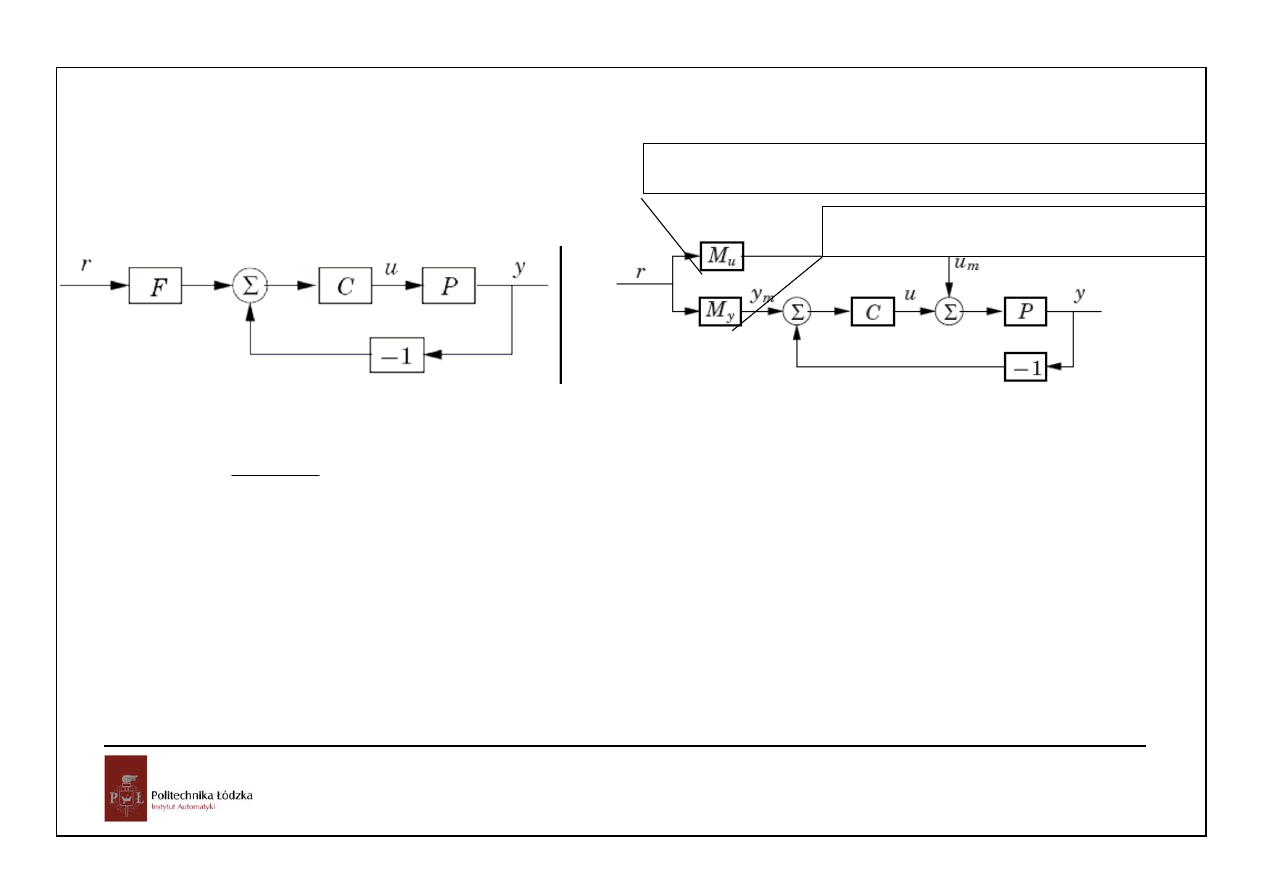
Poprawić odpowiedź na sygnał zadający
y
u
F( s )C( s ) M ( s )C( s ) M ( s )
=
+
Jeśli
y
u
M ( s )
M ( s )
P( s )
=
, to
y
Y ( s ) M ( s )R( s )
=
.
Żeby uzyskać realizowalność:
• Niestabilne zero P musi być zerem M
y
• Opóźnienie P musi być opóźnieniem M
y
• Różnica między liczbą biegunów a zer w M
y
musi być większa niż w P
Sterowanie forsujące ma zwykle działać dobrze dla małych częstotliwości – można używać
przybliżonych modeli.
Generator pożądanej odpowiedzi
Generator sterowania dla pożądanej odpowiedzi
7
Automatyka i sterowanie 9 Sterowanie forsujące
Układy czasu ciągłego
Sprężenie zwrotne
Działa tylko w przypadku wystąpienia uchybu
Jest sterowaniem prowadzonym przez wyjście
Daje odporność na zmiany obiektu (
1
S( j )
ω
<
)
Ryzyko niestabilności
Potrafi ustabilizować niestabilny obiekt
Sterowanie forsujące
Uprzedza wystąpienie uchybu
Jest sterowaniem według planu/algorytmu
Nie poprawia odporności na zmiany obiektu
Nie powoduje niestabilności
Tylko dla obiektów stabilnych
8
Automatyka i sterowanie 9 Sterowanie forsujące
Układy czasu ciągłego
Wyszukiwarka
Podobne podstrony:
automatyka i sterowanie wyklad 15
automatyka i sterowanie wyklad Nieznany (8)
automatyka i sterowanie wyklad Nieznany (2)
automatyka i sterowanie wyklad 3
automatyka i sterowanie wyklad Nieznany (7)
automatyka i sterowanie wyklad Nieznany (14)
automatyka i sterowanie wyklad 16
automatyka i sterowanie wyklad Nieznany (12)
automatyka i sterowanie wyklad Nieznany (16)
automatyka i sterowanie wyklad Nieznany (5)
automatyka i sterowanie wyklad 11
automatyka i sterowanie wyklad 4
automatyka i sterowanie wyklad 5
automatyka i sterowanie wyklad Nieznany (10)
automatyka i sterowanie wyklad Nieznany (3)
automatyka i sterowanie wyklad 8
automatyka i sterowanie wyklad 2
automatyka i sterowanie wyklad 15
automatyka i sterowanie wyklad Nieznany (8)
więcej podobnych podstron