PRZYKŁADY RUCHU
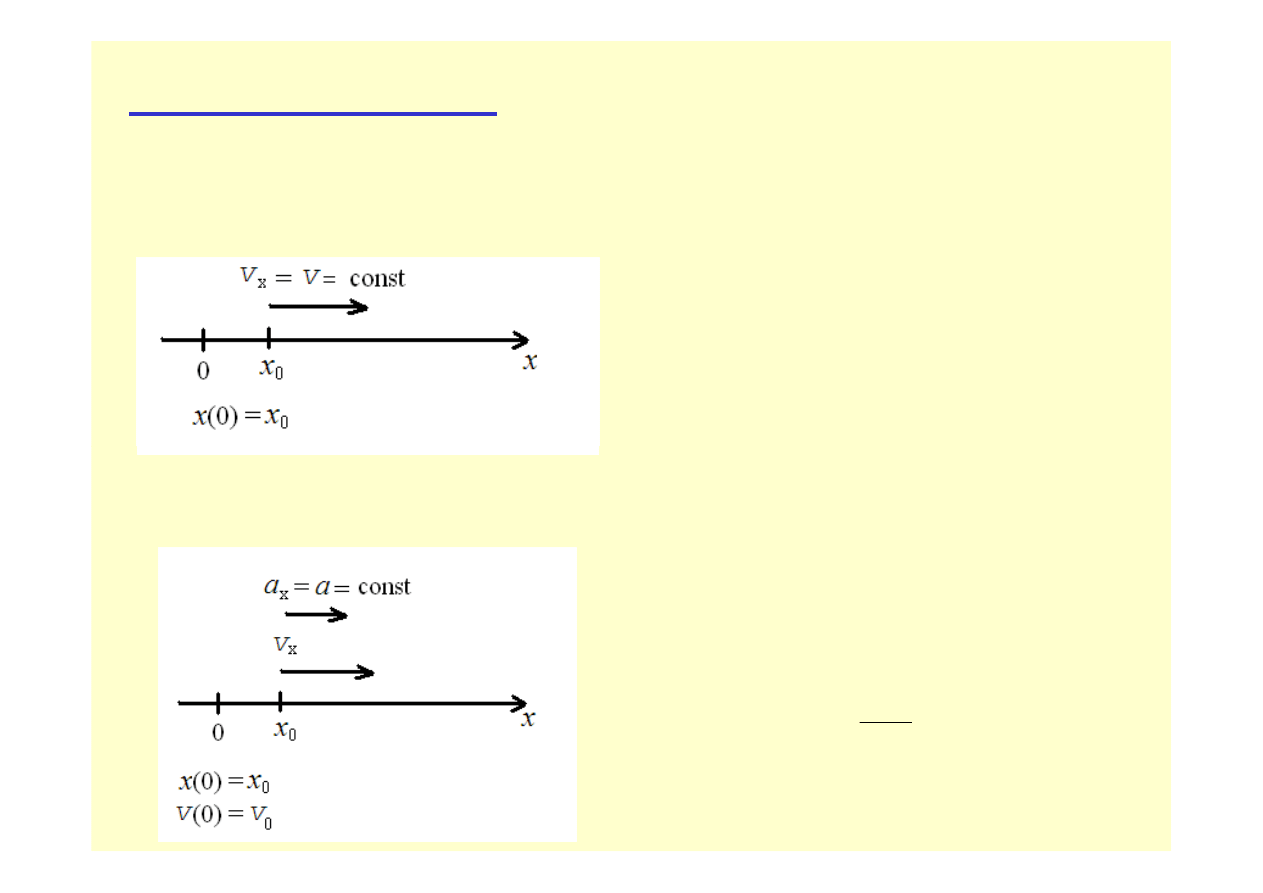
Ruch w jednym wymiarze (y=0, z=0):
Ruch jednostajny prostoliniowy
onst
c
=
v
t
x
x
v
±
=
0
równanie ruchu
Ruch jednostajnie zmienny prostoliniowy
onst
c
a
=
t
a
±
=
0
v
v
2
2
0
0
at
t
x
x
±
±
=
v
równanie ruchu
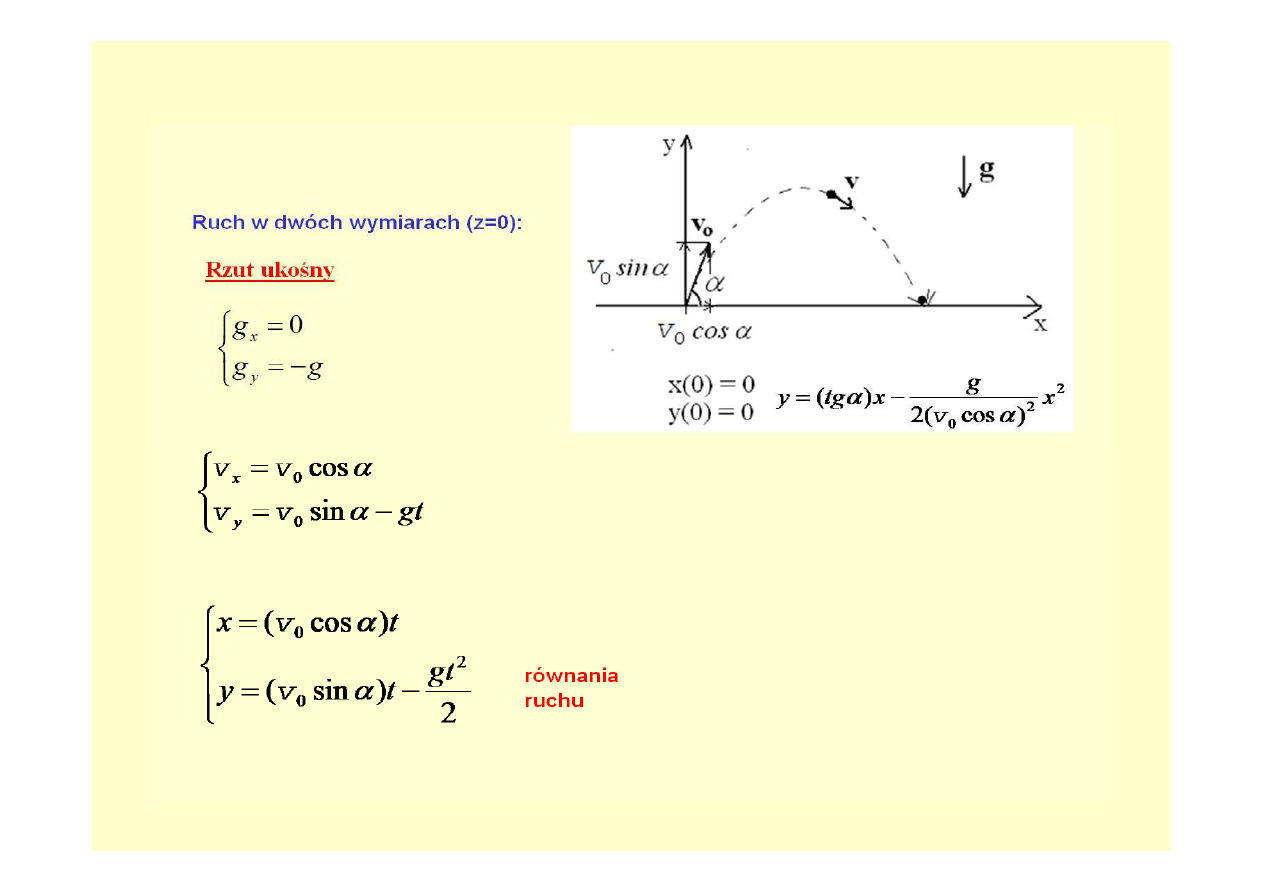
Ruch w dwóch wymiarach (z=0):
−
=
=
g
g
g
y
x
0
2
2
0
)
cos
(
2
)
(
x
g
x
tg
y
α
α
v
−
=
Rzut ukośny
=
α
cos
v
v
−
=
=
gt
y
x
α
α
sin
cos
0
0
v
v
v
v
−
=
=
2
)
sin
(
)
cos
(
2
0
0
gt
t
y
t
x
α
α
v
v
równania
ruchu
2
2
0
2
0
0
2
sin
2
sin
t
g
gt
g
t
g
dt
d
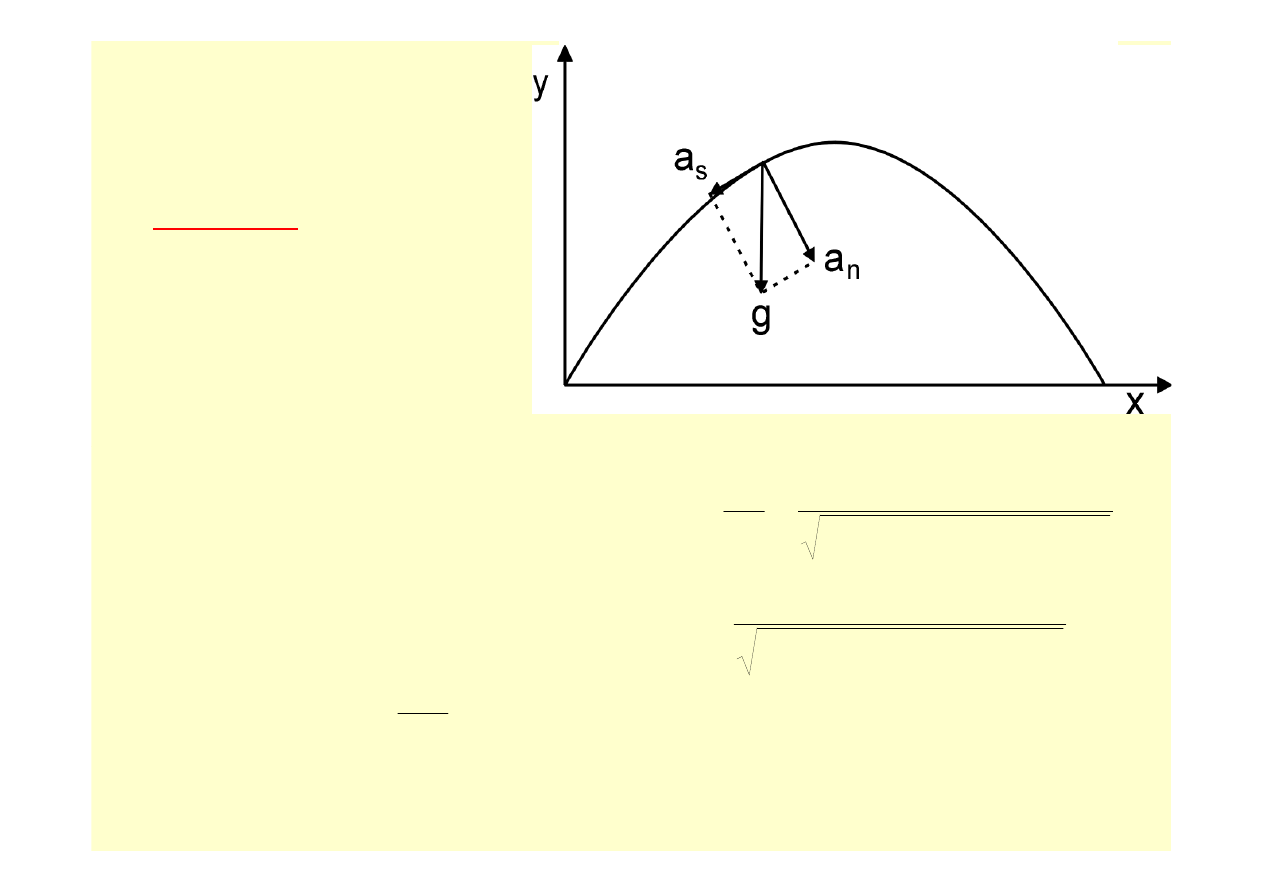
a
S
+
−
−
=
=
α
α
v
v
v
v
2
2
0
2
0
0
sin
2
cos
t
g
gt
g
a
n
+
−
=
α
α
v
v
v
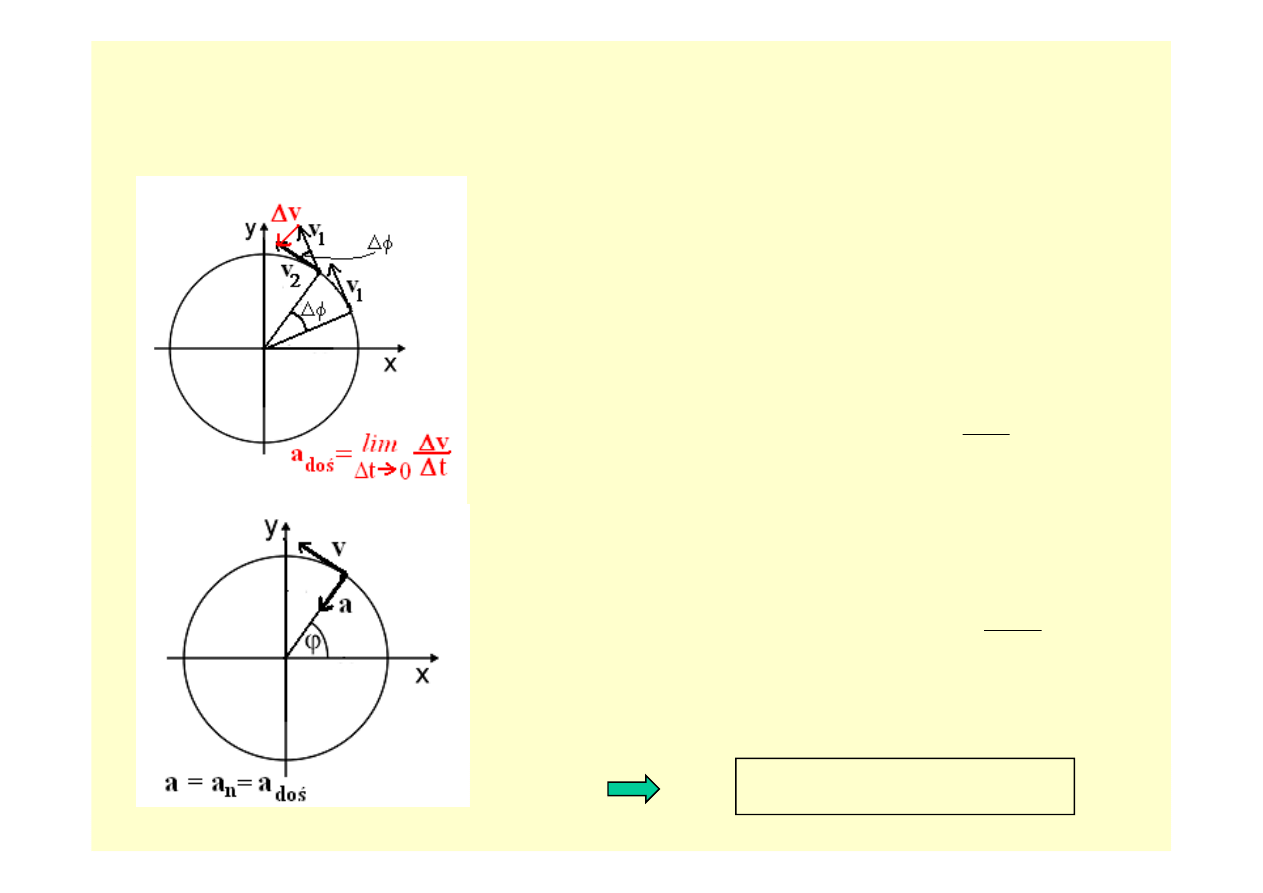
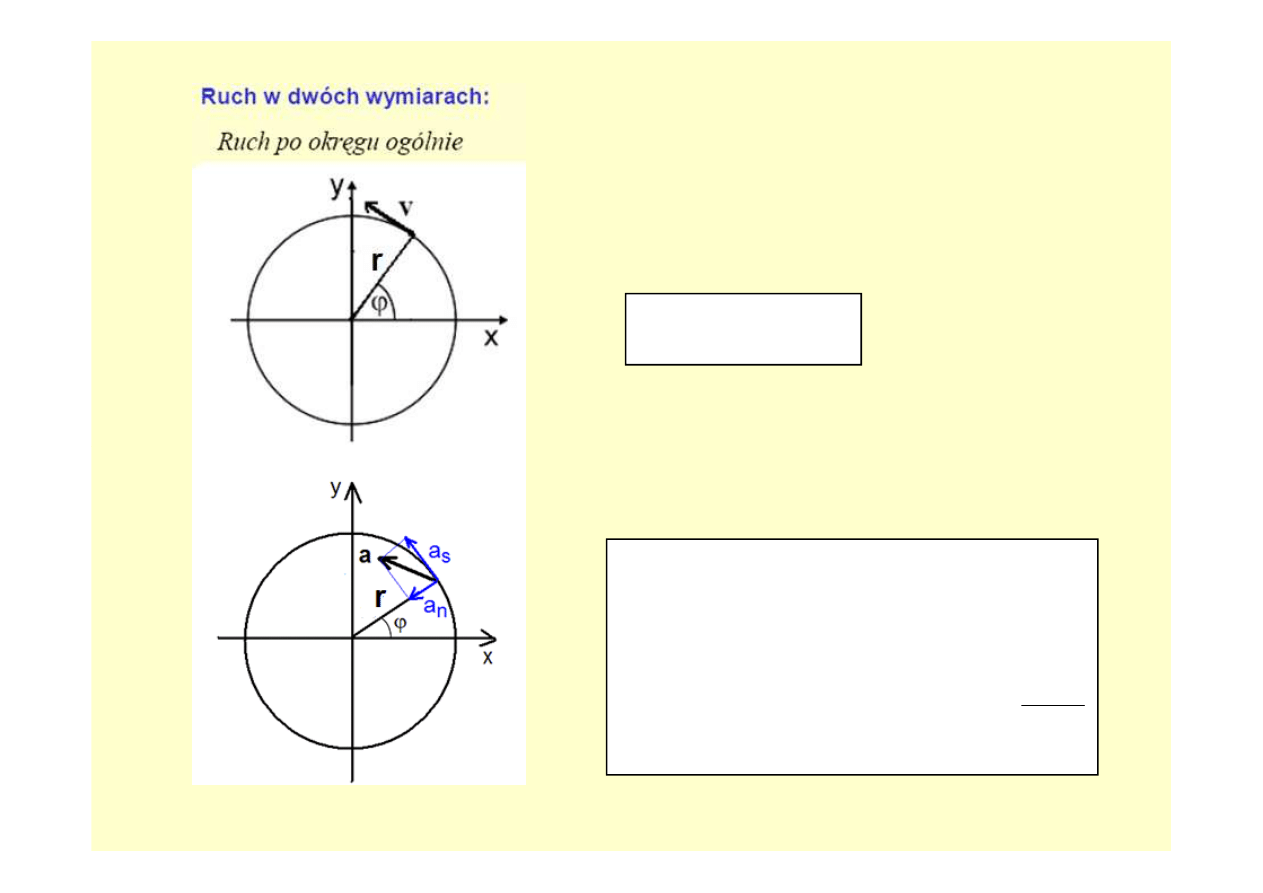
Ruch w dwóch wymiarach:
Ruch po okręgu – stała prędkość kątowa
+
=
=
0
)
(
.
)
(
ϕ
ω
ϕ
t
t
const
t
r
+
=
+
=
)
sin(
)
(
)
cos(
)
(
0
0
ϕ
ω
ϕ
ω
t
r
t
y
t
r
t
x
+
=
+
−
=
)
cos(
)
sin(
0
ϕ
ω
ϕ
ω
t
rω
t
rω
x
v
const
dt
d
=
=
ϕ
ω
równania
ruchu
Układ kartezjański:
Układ biegunowy:
+
=
)
cos(
0
ϕ
ω
t
rω
y
v
const
dt
=
=
ω
−
=
−
=
2
2
yω
a
xω
a
y
x
0
=
=
dt
d
ω
ε
2
,
0
rω
a
a
a
doś
n
S
=
=
=
r
a
2
ω
−
=
lub inaczej:
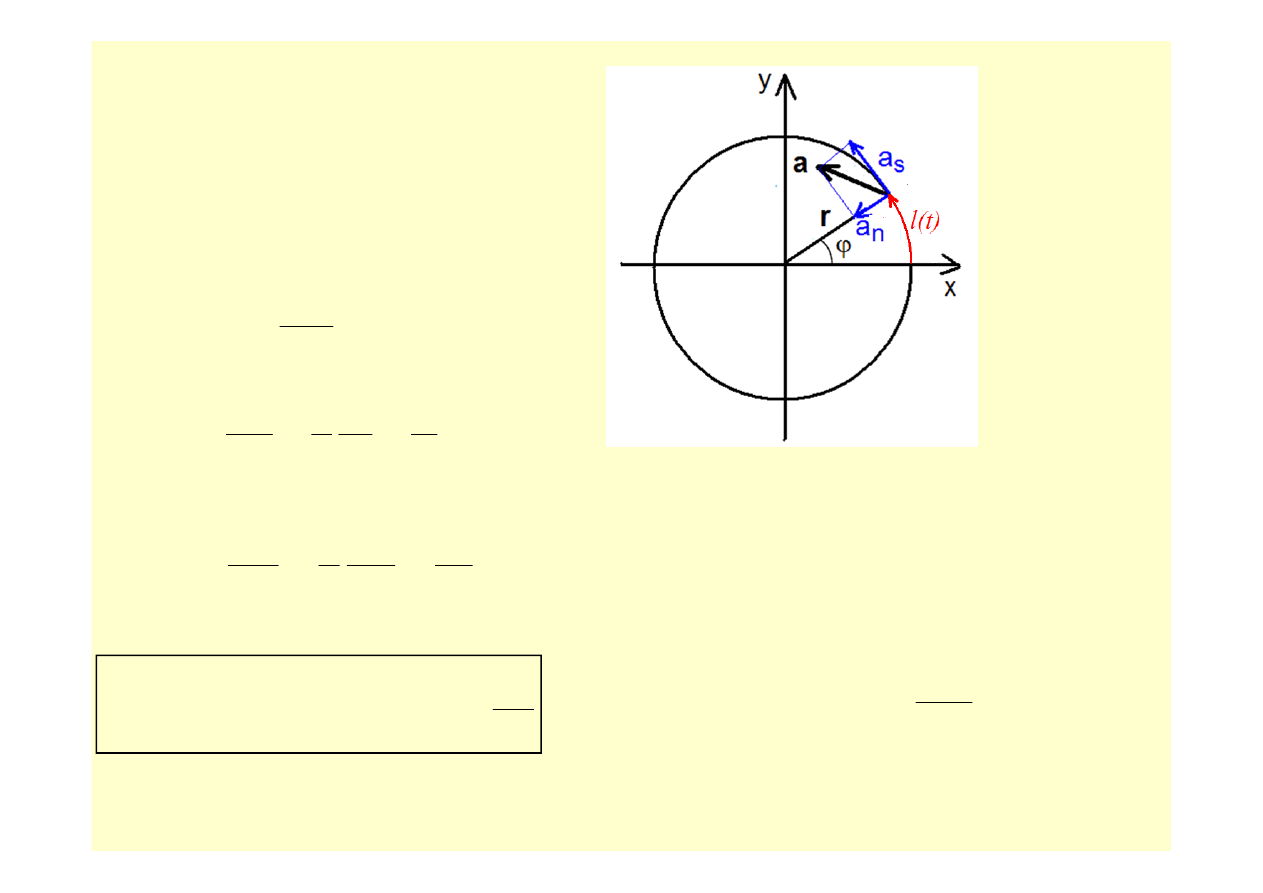
Ruch w dwóch wymiarach:
Ruch po okręgu - zmienny
=
=
=
r
t
l
t
const
t
r
)
(
)
(
0
oraz
.
)
(
0
ϕ
ϕ
r
t
l
r
t
v
=
=
=
d
d
1
d
d
ϕ
ω
Układ biegunowy:
r
t
r
t
=
=
=
d
d
ω
r
a
t
r
t
s
=
=
=
d
d
1
d
d
v
ω
ε
r
r
a
a
ε
r
a
doś
n
S
2
2
,
v
=
=
=
=
ω
±
±
=
±
=
=
2
.
zmienny
ie
jednostajn
2
0
0
0
t
t
t
const
ε
ω
ϕ
ϕ
ε
ω
ω
ε
rω
=
v
=
=
=
=
r
rω
a
a
ε
r
a
doś
n
S
2
2
v
Wyszukiwarka
Podobne podstrony:
więcej podobnych podstron