WOJSKOWA AKADEMIA TECHNICZNA
ZAKŁAD AWIONIKI I UZBROJENIA LOTNICZEGO
Ćwiczenie laboratoryjne:
BADANIE STABILNOŚCI UKŁADÓW DYNAMICZNYCH
Warszawa 2009
2
1. Wstęp
Układy nadążne położenia lub siły nazywamy serwomechanizmami. Zadanie sterowania
układów nadążnych (śledzących) nie jest z góry określone, lecz zależy od wyników pomiarów
w innym procesie, np. układ sterownia lufą działa – śledzi poruszający się cel.
Serwomechanizm – układ regulacji nadążnej służący do precyzyjnego sterowania ruchem
obiektu, działającym na zasadzie objęcia ujemnym sprzężeniem zwrotnym układu wykonawczego
(silnik elektryczny, siłownik hydrauliczny). Układy wykonawczy sterowany jest sygnałem
odchylenia sygnału wyjściowego od wejściowego.
Serwomechanizmy możemy podzielić w zależności od:
a) rodzaju energii zasilania:
- elektryczne;
- hydrauliczne;
- pneumatyczne.
b) rodzaju przemieszczenia elementu wykonawczego:
- o ruchu obrotowym;
- o ruchu postępowym.
c) sygnału wyjściowego:
- serwomechanizm przemieszczenia;
- serwomechanizm siły.
WW
EW
SZ
Z
y
e
1
y
1
x
e
-
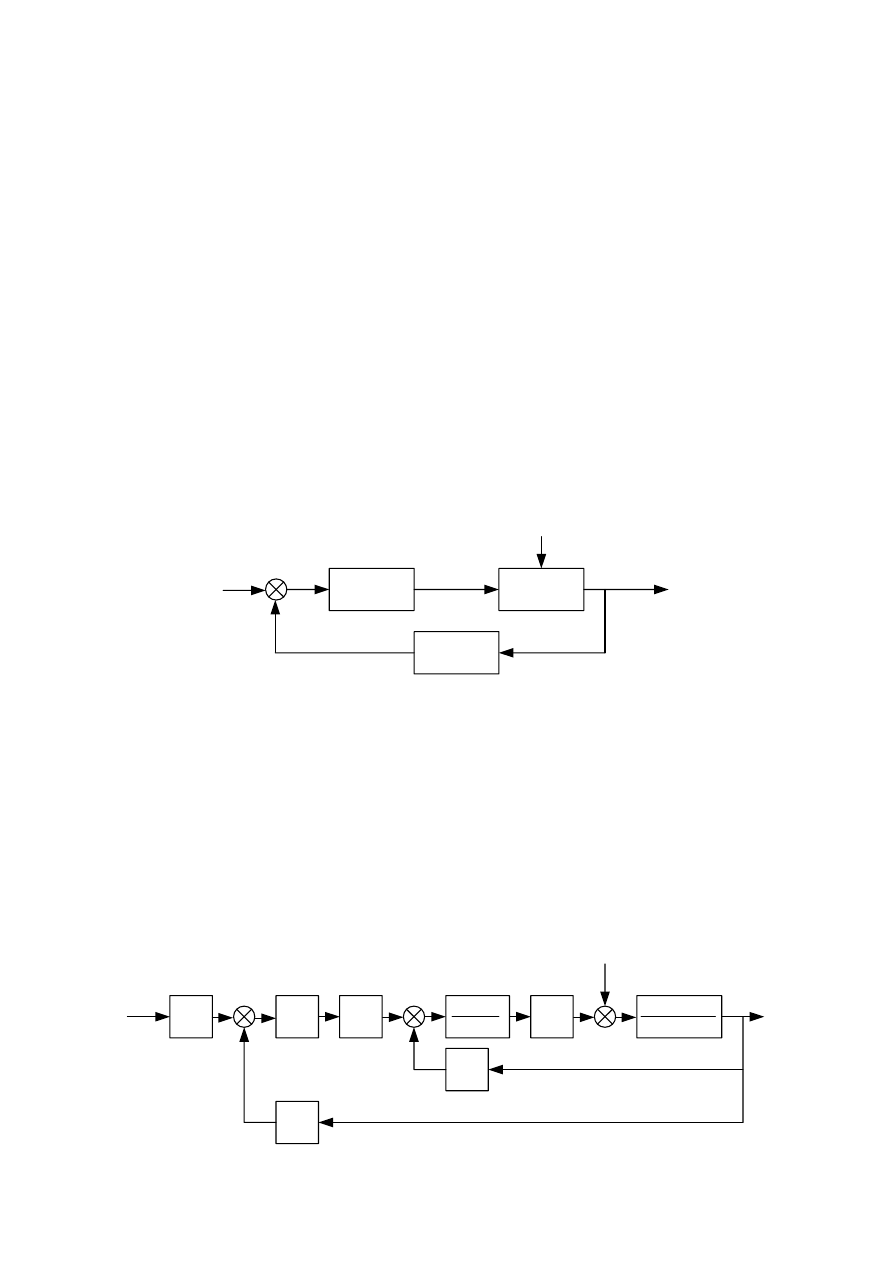
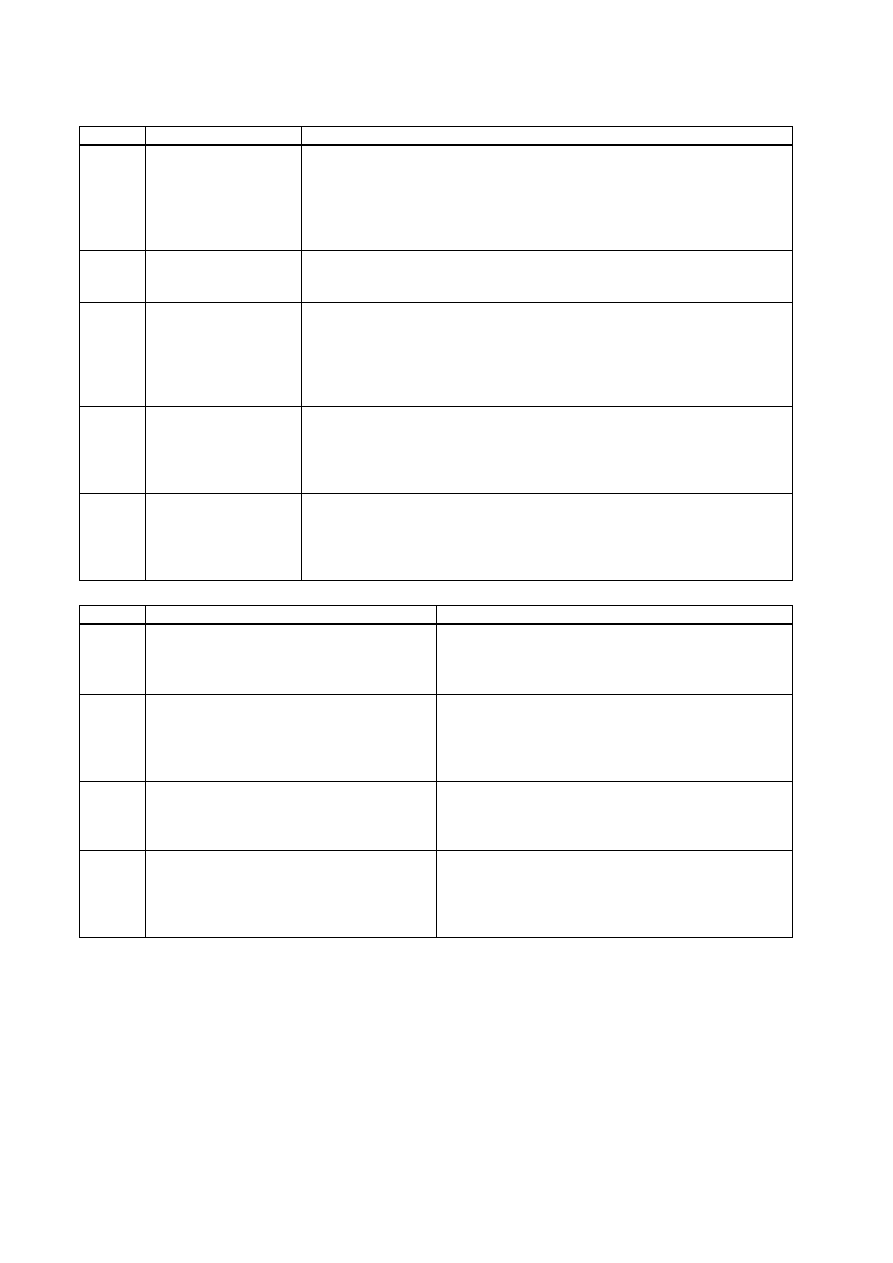
Rys. 1. Schemat blokowy serwomechanizmu
Schemat blokowy serwomechanizmu przedstawiony jest na rys. 1., gdzie układ
wykonawczy składający się ze wzmacniacza wstępnego WW i elementu wykonawczego (silnika)
EW, objęty jest układem ujemnego sprzężenia zwrotnego SZ. Na układ działają zakłócenia Z,
najczęściej w postaci sił obciążenia serwomechanizmu.
2. Schemat blokowy i transmitancja serwomechanizmu.
W trakcie ćwiczenia modelowany będzie serwomechanizm który składa się z:
- elementu wykonawczego w postaci pneumatycznego układu rozdzielacz – siłownik;
- wzmacniacza wstępnego;
- układu sprzężenia zwrotnego.
a
b
K
1
K
X
1
T
h
s+1
A
K
V
s(T
m
s+1)
b
×s
y
-
-
x
e
e
1
P
-
F
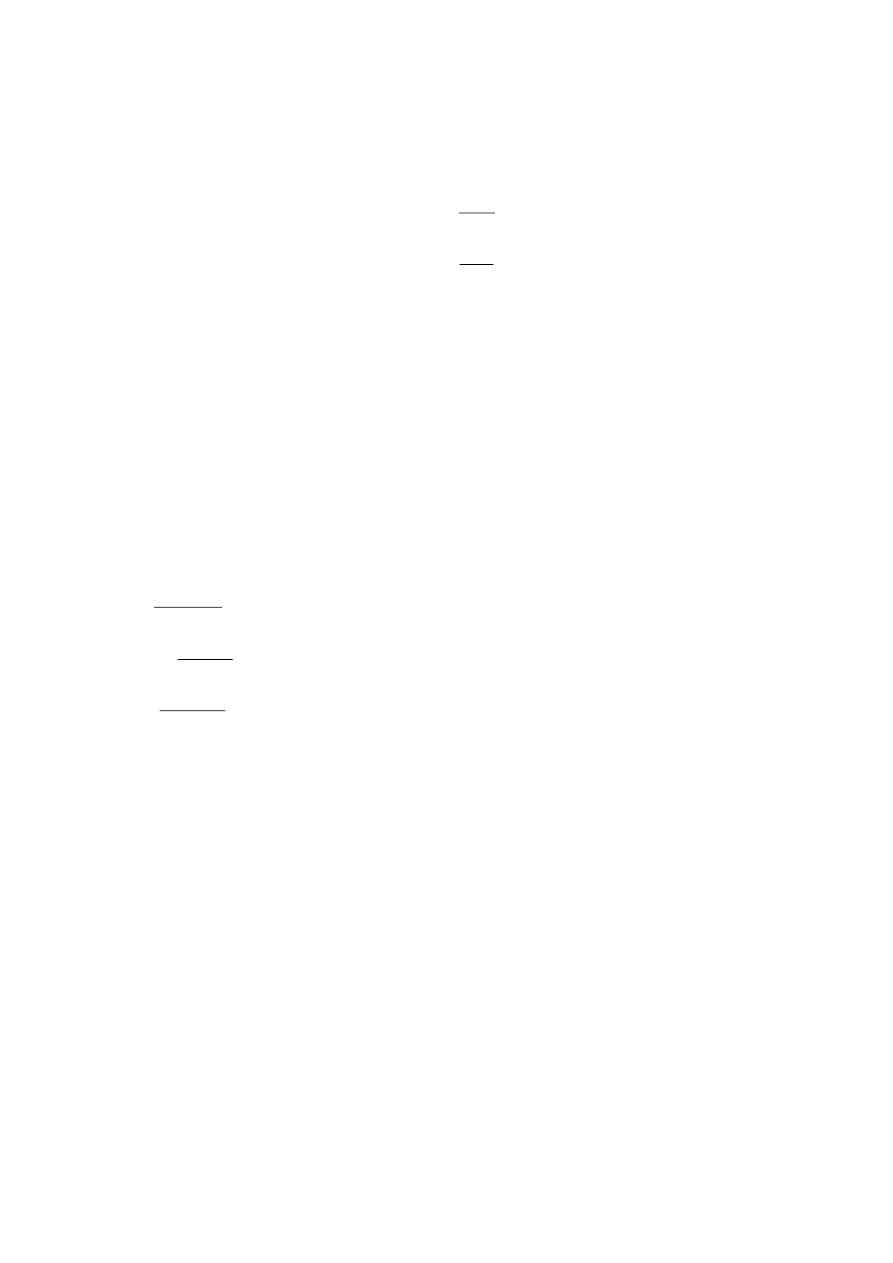
Rys. 2. Schemat blokowy modelowanego serwomechanizmu
3
Schemat blokowy rozpatrywanego układu przedstawiony jest na rys. 2. Wielkości występujące
na rysunku:
a
– wzmocnienie wejściowe;
K
1
– wzmocnienie wzmacniacza wstępnego;
K
X
– wzmocnienie położeniowe rozdzielacza;
T
h
– płynowa stała czasu siłownika;
A – powierzchnia czynna tłoka;
P – różnica ciśnień na powierzchni tłoka;
F – zakłócenia;
K
V
– wzmocnienie elementu wykonawczego
T
m
– stała czasu elementu wykonawczego
b – wzmocnienie prędkościowe;
b
– wzmocnienie sprzężenia zwrotnego.
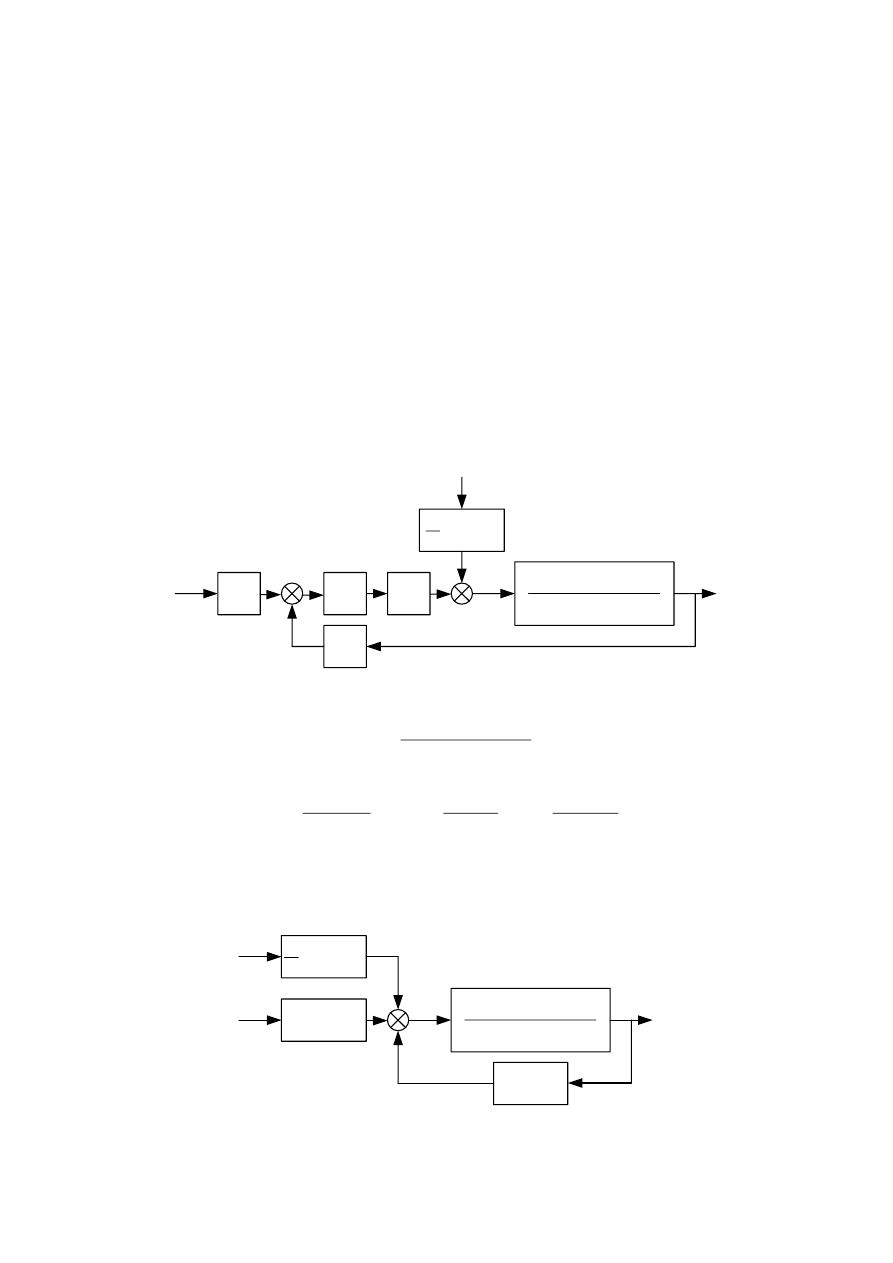
Do analizy dynamiki układu należy przekształcić podany schemat. Przekształcenie polega na
przeniesieniu zakłócenia F z trzeciego węzła sumacyjnego do drugiego węzła sumacyjnego.
Następnie obliczamy transmitancję układu objętego wewnętrznym sprzężeniem zwrotnym.
Schemat po przekształceniu będzie miał postać
a
b
K
1
K
X
y
-
x
F
2
0
0
2
2
0
2
s
s
s
K
1
1
s
T
A
h
-
Rys. 3. Schemat blokowy serwomechanizmu po przekształceniach (1 etap)
Transmitancja zastępcza układu objętego wewnętrznym sprzężeniem zwrotnym:
2
0
0
2
2
0
2
s
s
K
G
z
gdzie:
b
AK
A
K
V
1
,
m
h
m
h
T
T
T
T
0
2
,
m
h
V
T
T
b
AK
1
2
0
.
Serwomechanizm traktujemy jako układ wielowymiarowy o jednym sygnale wyjściowym y i
dwóch
sygnałach
wejściowych:
sygnał
sterujący
x
oraz
zakłócający F. W celu wyraźnego przedstawienia wpływu sygnałów wejściowych na dynamikę
układu, schemat można przekształcić do postaci:
b
K
1
K
X
y
-
x
F
2
0
0
2
2
0
2
s
s
s
K
1
1
s
T
A
h
-
a
K
1
K
X
Rys. 4. Schemat blokowy serwomechanizmu po przekształceniach (2 etap)
4
W trakcie ćwiczenia należy wyznaczyć transmitancje:
s
F
s
Y
s
G
s
X
s
Y
s
G
yf
yx
3. Badanie dynamiki układu w pakiecie Matlab – Simulink
Pakiet Matlab – Simulink daje szerokie możliwości analizy dynamiki układów automatycznej
regulacji.
W pakiecie tym wykorzystywane są następujące postaci liniowych modeli dynamicznych:
Równania stanu;
Macierze
transmitancji dla układów SIMO (jedno wejście wiele wyjść);
Macierze transmitancji (układy SIMO) w postaci iloczynu zer, biegunów i wzmocnienia.
Transmitancja układu dynamicznego jest funkcją wymierną operatora s (dla układów ciągłych)
lub z (dla układów dyskretnych). W bibliotece Control Toolbox transmitancję podaje się w postaci
pary wektorów zawierających współczynników licznika i mianownika, przy czym umieszcza się je
tam wg. malejących potęg operatorów s lub z, np.: L=[1 2]; M=[1 3 2];
Takiemu zapisowi odpowiada transmitancja:
2
3
2
2
s
s
s
s
G
. Aby określić transmitancję układu
SIMO należy:
Podać wektor współczynników mianownika transmitancji;
Podać macierz zawierającą w kolejnych wierszach współczynniki liczników
odpowiadających kolejnym wyjściom układu.
Na przykład, zapis L=[1 2; 3 1]; M=[1 3 2] odpowiada transmitancji:
2
3
1
3
2
3
2
2
2
s
s
s
s
s
s
s
G
.
W programie MATLAB posługujemy się wyłącznie transmitancjami spełniającymi warunek
mówiący, ze stopień mianownika powinien być większy od stopnia licznika. Aby określić macierz
transmitancji przez podanie zer, biegunów i wzmocnienia należy podać:
Kolumnowy wektor biegunów transmitancji P (ang. poles);
Macierz Z (ang. zeros) zawierającą w kolejnych kolumnach zera odpowiadające kolejnym
wyjściom układu;
Podać wektor kolumnowy G (ang. gains) zawierający wzmocnienia odpowiadające kolejnym
wyjściom układu.
5
W pakiecie Matlab – Simulink wykorzystujemy następujące polecenia:
Skrót
Zapis
Opis
impulse
dimpulse
impulse(A,B,C,D,iu,t)
impulse(L,M,t)
Funkcje te wyznaczają odpowiedź układu ciągłego (dimpulse- dyskretnego) na
impuls jednostkowy. W przypadku układu opisanego równaniami stanu
kreślona jest odpowiedź wszystkich wyjść na impuls pojawiający się na
wejściu o numerze iu. Dla układów ciągłych można dołączyć własny wektor
czasu symulacji odpowiedzi. W przypadku pominięcia parametru t wektor
czasu zostanie pominięty.
initial
dinitial
initial(A,B,C,D,X0,T)
Funkcja ta wyznacza odpowiedź układu opisanego równaniami stanu na
warunek początkowy określony parametrem X0. Czas symulacji i wektor chwil
czasu jest określany automatycznie lub przez użytkownika (parametr T).
step
dstep
step(A,B,C,D,iu)
step(A,B,C,D,iu,t)
step(L,M)
Funkcja ta wyznacza odpowiedź układu ciągłego na skok jednostkowy. W
przypadku układu opisanego równaniami stanu kreślona jest odpowiedź
wszystkich wyjść na skok jednostkowy pojawiający się na wejściu o numerze
iu. Dla układów ciągłych można dołączyć własny wektor czasu symulacji
odpowiedzi. W przypadku pominięcia parametru t wektor czasu zostanie
pominięty.
bode
bode(A,B,C,D,iu,w)
bode(L,M,w)
Funkcja ta wyznacza charakterystykę częstotliwościową Bode. Częstotliwości i
liczba punktów dobierana jest automatycznie lub zgodnie z wymaganiami
użytkownika (parametr w). W przypadku układu opisanego równaniami stanu
kreślona jest odpowiedź wszystkich wyjść na skok jednostkowy pojawiający
się na wejściu o numerze iu.
nyquist
nyquist(A,B,C,D,iu,w)
nyquist(L,M,w)
Funkcja ta wyznacza charakterystykę Nyquista. Częstotliwości i liczba
punktów dla których kreślona jest charakterystyka dobierane są automatycznie
lub zgodnie z wymaganiami użytkownika (parametr w). W przypadku układu
opisanego równaniami stanu kreślona jest odpowiedź wszystkich wyjść na skok
jednostkowy pojawiający się na wejściu o numerze iu.
Skrót
Zapis
Opis
margin
[Gm, Pm, Wcg, Wcp] = margin(A,B,C,D)
[Gm, Pm, Wcg, Wcp] = margin(L,M)
Funkcja ta oblicza zapas amplitudy (Gm) i fazy (Pm) dla
układu opisanego równaniami stanu lub transmitancją
oraz odpowiadające im częstotliwosci graniczne-
odpowiednio Wcg i Wcp.
imargin
[Gm, Pm, Wcg, Wcp] = margin(ampl,faza,w)
Funkcja ta działa podobnie jak funkcja margin z tym, że
obliczenia opierają się o zadane wektory amplitudy i
fazy oraz odpowiadające im częstotliwości, które można
uzyskać funkcją bode lub dbode, dzięki czemu funkcja ta
działa zarówno dla układów ciągłych, jak i dyskretnych.
rlocus
rlocus(A,B,C,D)
rlocus(L,M)
rlocus (L,M,K)
rlocus(A,B,C,D,K)
Funkcja ta wyznacza drogi pierwiastków układu
otwartego.
rlocfind
[K,R]=rlocfind(A,B,C,D)
[K,R]=rlocfind (L,M)
[K,R]=rlocfind (L,M,n)
[K,R]=rlocfind (A,B,C,D,n)
Jeżeli w aktywnym oknie znajduje się wykres zależności
położenia biegunów od wzmocnienia uzyskany funkcją
rlocus, to funkcja rlocfind umożliwia wybranie myszką
żądanego bieguna układu SISO opisanego transmitancją
lub równaniami stanu.
6
4. Przebieg ćwiczenia.
W skład stanowiska laboratoryjnego wchodzi komputer z zainstalowanym pakietem Matlab –
Simulink.
A. Przed rozpoczęciem obliczeń należy wyznaczyć transmitancje
s
F
s
Y
s
G
s
X
s
Y
s
G
yf
yx
zgodnie z rys. 4.
B. Danymi wejściowymi do obliczeń będą:
a
– wzmocnienie wejściowe;
K
1
– wzmocnienie wzmacniacza wstępnego;
K
X
– wzmocnienie położeniowe rozdzielacza;
T
h
– płynowa stała czasu siłownika;
A – powierzchnia czynna tłoka;
K
V
– wzmocnienie elementu wykonawczego
T
m
– stała czasu elementu wykonawczego
b – wzmocnienie prędkościowe;
b
– wzmocnienie sprzężenia zwrotnego.
C. Obliczyć pozostałe parametry
b
AK
A
K
V
1
,
m
h
m
h
T
T
T
T
0
2
,
m
h
V
T
T
b
AK
1
2
0
.
D. Przeprowadzić analizę dynamiki układu oddzielnie dla transmitancji G
yx
(s) i G
yf
(s).
Należy określić wektory współczynników licznika L i mianownika M analizowanej
transmitancji.
W celu analizy dynamiki i stabilności układu korzystamy z poleceń przedstawionych
w punkcie 3 instrukcji. Analizę prowadzimy dla kolejnych wartości danych wejściowych,
do momentu gdy układ znajdzie się na granicy stabilności. Uzyskane wykresy należy archiwizować
np. w postaci plików graficznych, oraz zanotować przyjęte do obliczeń dane.
5. Wytyczne do wykonania sprawozdania.
Sprawozdanie powinno zawierać:
1) w części teoretycznej
- schemat blokowy układu;
- wyprowadzenie transmitancji G
yx
(s) i G
yf
(s).
2) w części praktycznej
- zapis opracowanego programu („skryptu”)
- uzyskane wybrane wykresy obrazujące zmianę stabilności układu w zależności od przyjętych
danych; do każdego wykresu powinny być dołączone dane, dla jakich prowadzone były obliczenia.
3) wnioski
Wyszukiwarka
Podobne podstrony:
więcej podobnych podstron