
1
DR INŻ. KRZYSZTOF CHODNIKIEWICZ
Rok akademicki: 2012
Tylko do użytku własnego
Za zgodą @LMoszczynski
2. DOBÓR SILNIKA ELEKTRYCZNEGO
2.1. Uwagi wstępne
2.2. Czynniki ograniczające moc silnika
2.3. Metody doboru silnika
2.1. Uwagi wstępne.
Dobór silnika powinien być poprzedzony zebraniem informacji na temat maszyny roboczej oraz
warunków, w których ma być ona zainstalowana. Na temat maszyny roboczej należy wiedzieć:
- rodzaj maszyny (pompa, prasa hydrauliczna, obrabiarka, itd.),
- charakter jej pracy (ciągła, przerywana, dorywcza; definicje podano w punkcie 2.3),
- cykl pracy (jeżeli maszyn działa cyklicznie),
- wymagane obroty silnika i ewentualnie zakres ich zmienności,
- potrzebną moc silnika napędowego,
- potrzebny moment rozruchowy oraz moment maksymalny,
- zależność momentu oporowego od prędkości kątowej,
- przewidywane chwilowe przeciążenie silnika (w stosunku do warunków znamionowych),
- szczególne wymagania związane z pracą maszyny (np. dopuszczalny czas rozruchu)
- szczególne wymagania, które ma spełniać silnik (np.silnik z wałem dwustronnym, silnik na łapach),
- informacje dotyczące silników stosowanych w istniejących maszynach takiego samego, lub
podobnego typu.
Informacje dotyczące warunków, w których maszyna ma być zainstalowana, dotyczą:
- napięcia zasilania i częstotliwości tego napięcia,
- rodzaju sieci zasilającej (jednofazowa, trójfazowa),
- warunków klimatycznych (temperatura, wilgotność, zapylenie),
- otoczenia (hala fabryczna, otwarta przestrzeń, kopalnia, statek, itp.).
Dobór silnika polega na określeniu typu silnika (prądu przemiennego, prądu stałego), rodzaju budowy
(otwarta, zamknięta), obrotów, mocy (ewentualnie momentu), napięcia, odmiany wykonania
(mocowanie na łapach, mocowanie kołnierzowe), końców wału (jednostronny, dwustronny). Jeżeli
silnik ma mieć zmienną prędkość obrotową, to wraz z silnikiem należy dobrać urządzenia
umożliwiające zmienność prędkości.
Trudno jest jednoznacznie odpowiedzieć na pytanie jaki typ silnika (prądu stałego lub przemiennego)
należy zastosować do napędu danej maszyny lub urządzenia. Kilkadziesiąt lat temu sytuacja była
klarowniejsza, gdyż jeżeli prędkość obrotowa maszyny miała być zmienna, to wybierano silnik prądu
stałego. Obecnie, do maszyn o zmiennej prędkości obrotowej stosowane są zarówno silniki prądu
stałego jak i przemiennego. Można jednak stwierdzić, że jeżeli maszyna ma pracować ze stałą
prędkością obrotową, to korzystniejsze, szczególnie z uwagi na cenę, jest zastosowanie silnika prądu
przemiennego.
2.2. Czynniki ograniczające moc silnika
Są to czynniki: 1) mechaniczne, 2) elektromagnetyczne i 3) termiczne. Ograniczenia mechaniczne
związane są z wytrzymałością elementów silnika. Pierwsze ograniczenie wytrzymałościowe dotyczy
wału silnika. Konstruktor silnika musi tak zwymiarować jego wał, aby maksymalny moment
rozwijany przez silnik powodował naprężenia skręcające mniejsze od dopuszczalnych. Użytkownik
silnika nie musi się tym ograniczeniem zajmować. Drugie ograniczenie mechaniczne jest z punktu
2
widzenia użytkownika ważne i dotyczy siły działającej na wał silnika, prostopadłej do jego osi.
Wartość tej siły jest ograniczona, gdyż powoduje ona niekorzystne ugięcie wału silnika, a tym samym
zmianę szczeliny powietrznej pomiędzy wirnikiem i statorem. Dopuszczalna siła, prostopadła do osi
wału jest zazwyczaj podawana przez producenta silnika.
Ograniczenia elektromagnetyczne dotyczą maksymalnego momentu rozwijanego przez silnik. Można
przyjąć, że maksymalny moment elektromagnetyczny silnika (zarówno prądu stałego jak i
przemiennego) jest w warunkach powolnego wzrostu obciążenia 2 do 3 razy większy od momentu
znamionowego. Jeżeli natomiast wzrost obciążenia trwałby bardzo krótko, to silnik może – dzięki
momentowi dynamicznemu - pokonać moment obciążający większy od maksymalnego momentu
elektromagnetycznego.
Na moc silnika najbardziej wpływają ograniczenia termiczne i dlatego warto poświecić im szczególną
uwagę. Zacznijmy od parametrów silnika, które określa się przymiotnikiem „znamionowy”. Jest to
synonim słowa „nominalny”. W przypadku urządzeń mechanicznych mówimy najczęściej o
nominalnym udźwigu (np. dźwigi, haki), o nominalnym nacisku (np. prasy), o nominalnym ciśnieniu
(np. zbiorniki), itp. Pojęcia te wiążą się z naprężeniami, które konstruktor danego urządzenia uznał za
dopuszczalne i które odpowiadają stosownym przepisom polskim i międzynarodowym. Przepisy te
dotyczą w szczególności urządzeń, których działanie wiąże się z bezpieczeństwem i określają
minimalny współczynnik bezpieczeństwa tychże urządzeń. Przykładami są dźwigi, haki, windy, itp.
W przypadku silników elektrycznych, słowo „znamionowy” (moment, moc, obroty, sprawność)
określa takie warunki pracy, w których - przy temperaturze otoczenia 40
0
C - temperatura uzwojeń
silnika osiąga (lecz nie przekracza) temperaturę dopuszczalną, która zależy od klasy izolacji
uzwojenia, przy czym:
- klasa izolacji B odpowiada dopuszczalnej temperaturze 130
0
C,
- klasa izolacji F – temperaturze 155
0
C,
- klasa izolacji H – temperaturze 180
0
C.
Uzwojenia silnika nagrzewają się w wyniku strat mocy (rys.2.2.1). Straty w miedzi wynikają z
nagrzewania się uzwojeń i są wprost proporcjonalne do kwadratu prądu silnika. Straty w żelazie
spowodowane są pętlą histerezy oraz prądami wirowymi i występują podczas magnesowania i
rozmagnesowywania rdzenia prądem przemiennym. Warto sobie uświadomić, że przy częstotliwości
50 Hz rdzeń silnika jest magnesowany i rozmagnesowywany 100 razy na sekundę. Zmniejszenie strat
spowodowanych prądami wirowymi osiąga się wykonując rdzeń z cienkich blach. W przypadku
silników zasilanych z przekształtników napięcia straty wynikają także z niedoskonałego przebiegu
napięcia w czasie: niedokładnie stałego lub niedokładnie sinusoidalnego. Czytelnik zainteresowany
problemem jakości energii elektrycznej znajdzie wiele interesujących publikacji na stronie
www.sep.krakow.pl/kjee/publikacje/index.htm.
Sprawność silnika wyraża się wzorem
S
U
U
P
P
P
P
S
- MOC STRAT:
- w miedzi,
- w żelazie (tylko silniki prądu
przemiennego)
- wentylatorowe,
- tarcia.
P
U
- MOC
UŻYTECZNA
MOC DOSTARCZONA
DO SILNIKA
Rys.2.2.1
3
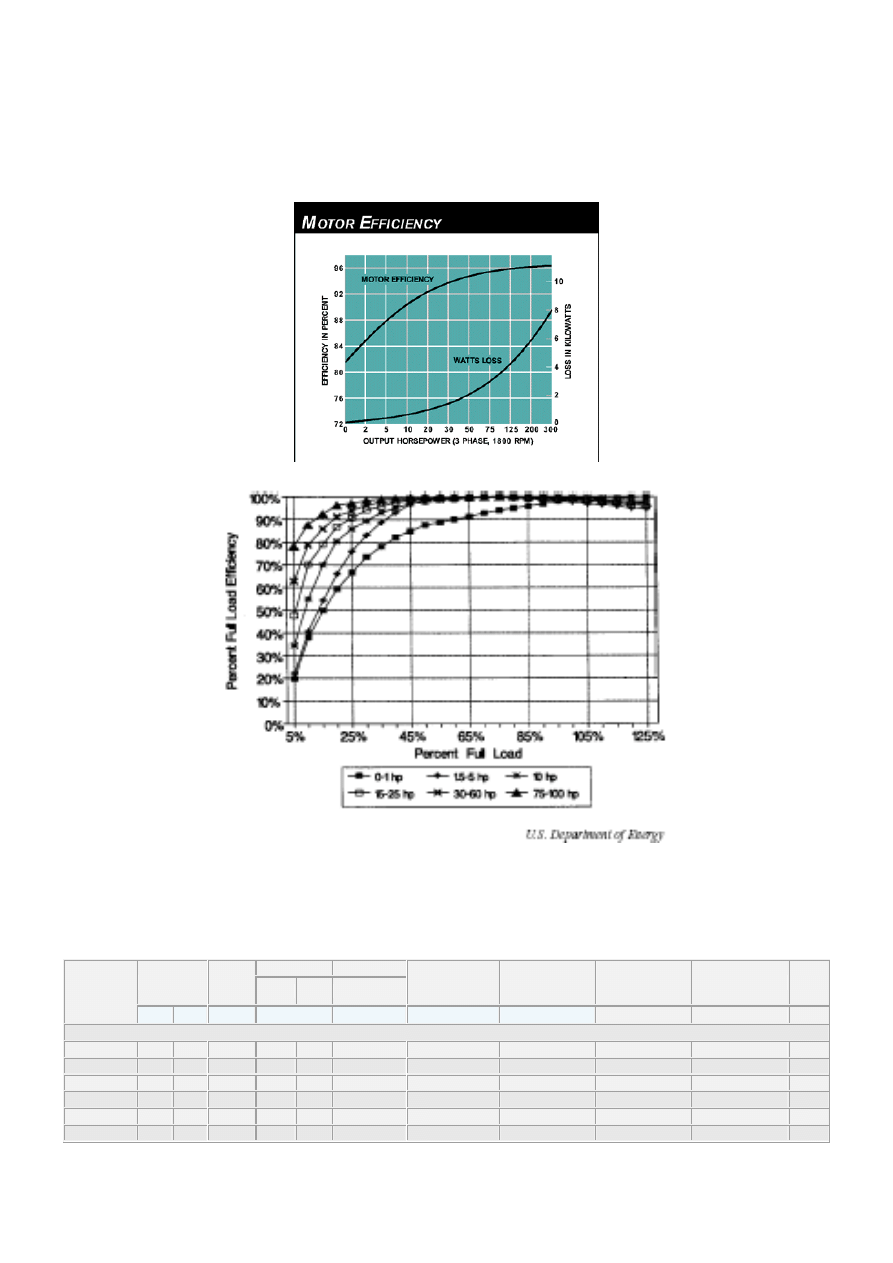
Symbole użyte w powyższym wzorze są wyjaśnione na rys.2.2.1. Sprawność znamionowa zależy od
mocy znamionowej silnika (rys.2.2.2a), a przy danej mocy znamionowej - od jego obciążenia
(rys.2.2.2b). Dolny wykres na pierwszy rzut oka wygląda dziwnie, ponieważ linia osiąga poziom
100%. Prawidłowa interpretacja wykresu wymaga właściwego zrozumienia określenia Percent Full
Load Efficiency, który oznacza wyrażony w procentach stosunek sprawności przy danym obciążeniu
do sprawności przy obciążeniu znamionowym.
W poniższej tablicy podano fragment katalogu z podstawowymi danymi technicznymi dotyczącymi
znamionowych parametrów silników indukcyjnych.
Typ
silnika
Moc
Obroty
Prąd przy
Sprawność
Współczynnik
mocy
Krotność
prądu
rozruchowego
Krotność
momentu
rozruchowego
Przeciążalność Masa
220V 380V
η
[kW] [KM] [min
-1
]
[A]
[%]
[cos
]
I
r
/I
n
M
r
/M
n
M
max/
M
n
[kg]
2p=2 Obroty synchroniczne 3000 min
-1
, 50Hz
STg 80-2i 0.55 0.75 2750
2.78 1.61
68
0.78
3.60
2.20
2.30
8.40
STg 80-2A 0.75 1.00 2800
3.39 1.96
68
0.86
4.30
2.30
2.50
9.10
STg 80-2B 1.10 1.50 2800
4.44 2.57
75
0.86
4.20
2.80
3.00
11.20
STg 90-2C 1.50 2.00 2800
6.49 3.76
73
0.83
4.50
3.40
3.70
13.90
STg 90-2D 2.20 3.00 2800
8.36 4.84
82
0.84
5.50
2.90
3.00
15.00
STg 90-2F 3.00 4.00 2800 11.60 6.70
85
0.79
5.50
3.50
3.50
18.00
(b)
Rys.2.2.2
(a)
4
Interesującym opracowaniem na temat sprawności silników elektrycznych jest dokument
www.fewe.pl/dok/refpompy.doc.
Przejdźmy do zjawisk cieplnych zachodzących w silniku. Wiadomo, że zarówno nagrzanie jak i
wystudzenie dowolnego ciała wymaga określonego czasu. Zmienność temperatury silnika w czasie
można wyznaczyć na podstawie modelu, w którym uzwojenia silnika są zastąpione jednorodną bryłą o
masie m i o małym oporze przewodzenia ciepła, do której w czasie dt zostaje doprowadzone ciepło
dt
P
dQ
S
Przypomnijmy, ze symbol
P
S
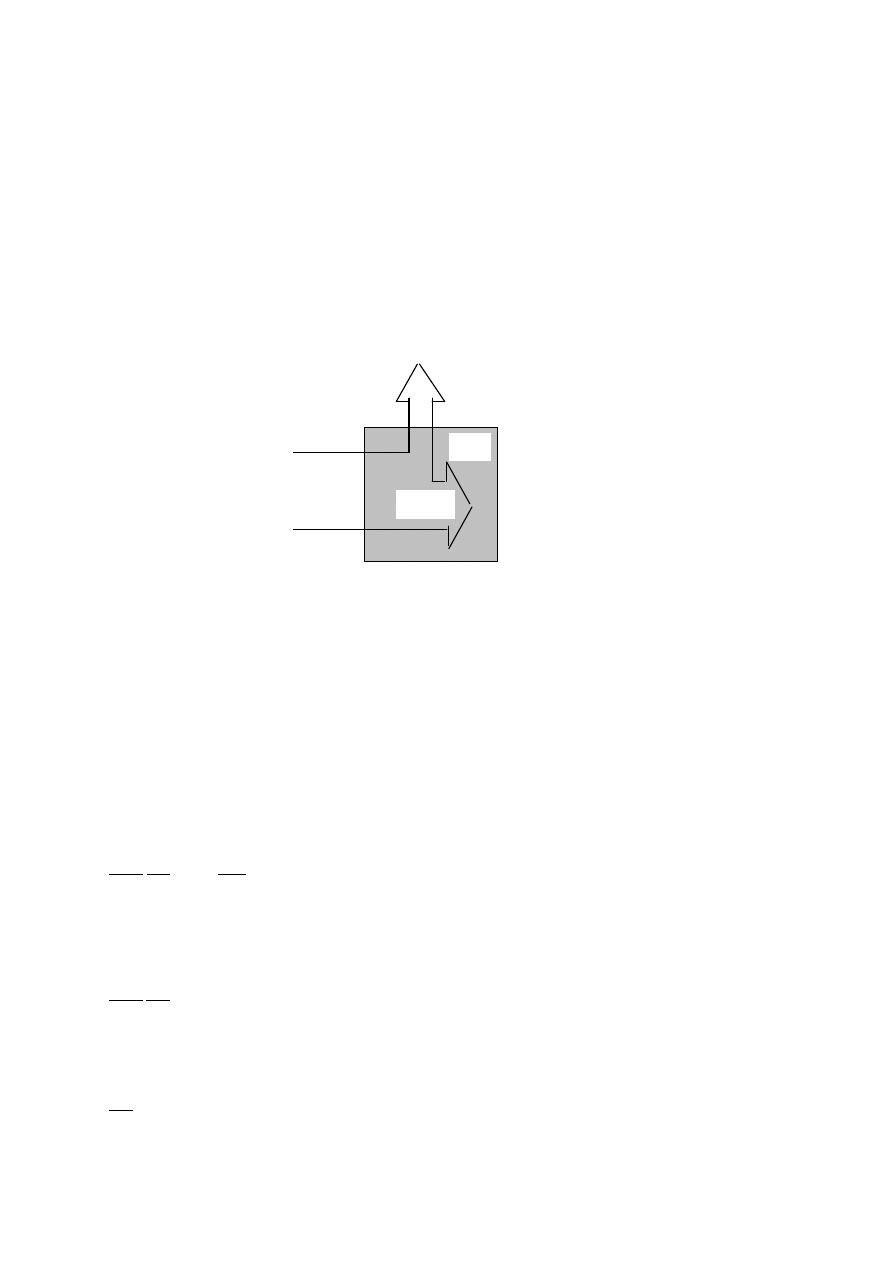
oznacza moc strat. Zgodnie z zasadą zachowania energii (rys.2.2.3) jest
O
S
dQ
dQ
dQ
+
=
Ciepło dQ
S
pozostaje w bryle nagrzewając ją, zaś ciepło dQ
0
, zostaje odprowadzone do otoczenia,
przy czym
d
c
m
dQ
p
S
dt
A
dQ
0
gdzie:
c
p
– ciepło właściwe w
kg
K
/
J
,
- nadwyżka temperatury bryły ponad temperaturę otoczenia w K,
A – powierzchnia bryły przez którą odprowadzane jest ciepło w m
2
,
- współczynnik przejmowania ciepła w
2
m
K
/
J
.
Można więc napisać
dt
P
dt
A
d
mc
S
p
czyli
A
P
dt
d
A
mc
S
p
(#)
Jest to równanie różniczkowe liniowe, zwyczajne o stałych współczynnikach. Rozwiązanie takiego
równania jest sumą rozwiązania pełnego równania uproszczonego (jednorodnego) i rozwiązania
szczególnego równania pełnego.
Równanie uproszczone
0
dt
d
A
mc
p
(*)
Przewidywanym rozwiązaniem tego równania jest
rt
e
C
(**)
gdzie C jest stałą. Różniczkując otrzymuje się
rt
e
rC
dt
d
(***)
Podstawiając (**) oraz (***) do (*), a następnie przekształcając, można obliczyć
dQ
0
dQ
dQ
S
Rys.2.2.3
m
5
p
mc
A
r
czyli rozwiązanie pełne równania uproszczonego ma postać
t
p
mc
A
e
C
Łatwo sprawdzić, że rozwiązaniem szczególnym równania (#) jest
A
P
S
czyli pełne rozwiązanie równania (#) ma postać
A
P
e
C
S
t
p
mc
A
Przyjmując, że w chwili t=0 jest
p
uzyskuje się
A
P
C
S
p
i następnie
A
P
e
A
P
S
t
p
mc
A
S
p
Ilorazy występujące w powyższej zależności wydają się być dość złożone. Maja one jednak prostą
interpretację fizyczną. Zinterpretujmy iloraz
A
/
P
S
zakładając, że osiągnięta została ustalona
nadwyżka temperatury
u
, czyli, że
0
dt
d
u
. Z równania (#) wynika, że
A
P
S
u
czyli ostatecznie
t
0
t
u
e
e
1
Przy czym symbolem Θ oznaczono cieplną stałą czasowa równa
A
mc
p
Dla małych silników Θ jest rzędu kilkunastu minut, dla dużych – kilku godzin. Z ostatecznego
rozwiązania wynika, że temperatura w modelowej bryle, a więc w przybliżeniu i w uzwojeniach
silnika, zmienia się wykładniczo.
Można zauważyć, że ustalona nadwyżka temperatury jest wprost proporcjonalna do mocy strat P
S
.
Największy udział w mocy strat przypada na straty w miedzi (rys.2.2.1), a te, jak już wiadomo, są
wprost proporcjonalne do kwadratu prądu I. Z kolei, prąd jest w przybliżeniu wprost proporcjonalny
do momentu silnika, M, i - dalej z coraz gorszym przybliżeniem - do mocy silnika P. Dlatego dla
ustalonej nadwyżki temperatury,
u
, można napisać
2
n
un
2
n
un
2
n
un
u
P
P
M
M
I
I
gdzie dolny indeks n oznacza znamionowe warunki pracy silnika. Z powyższych stwierdzeń wynikają
metody doboru mocy silnika. Najdokładniejszą jest metoda średnich strat. Innymi metodami są:
metoda prądu zastępczego, metoda momentu zastępczego i metoda mocy zastępczej.
2.3. Dobór mocy silnika
6
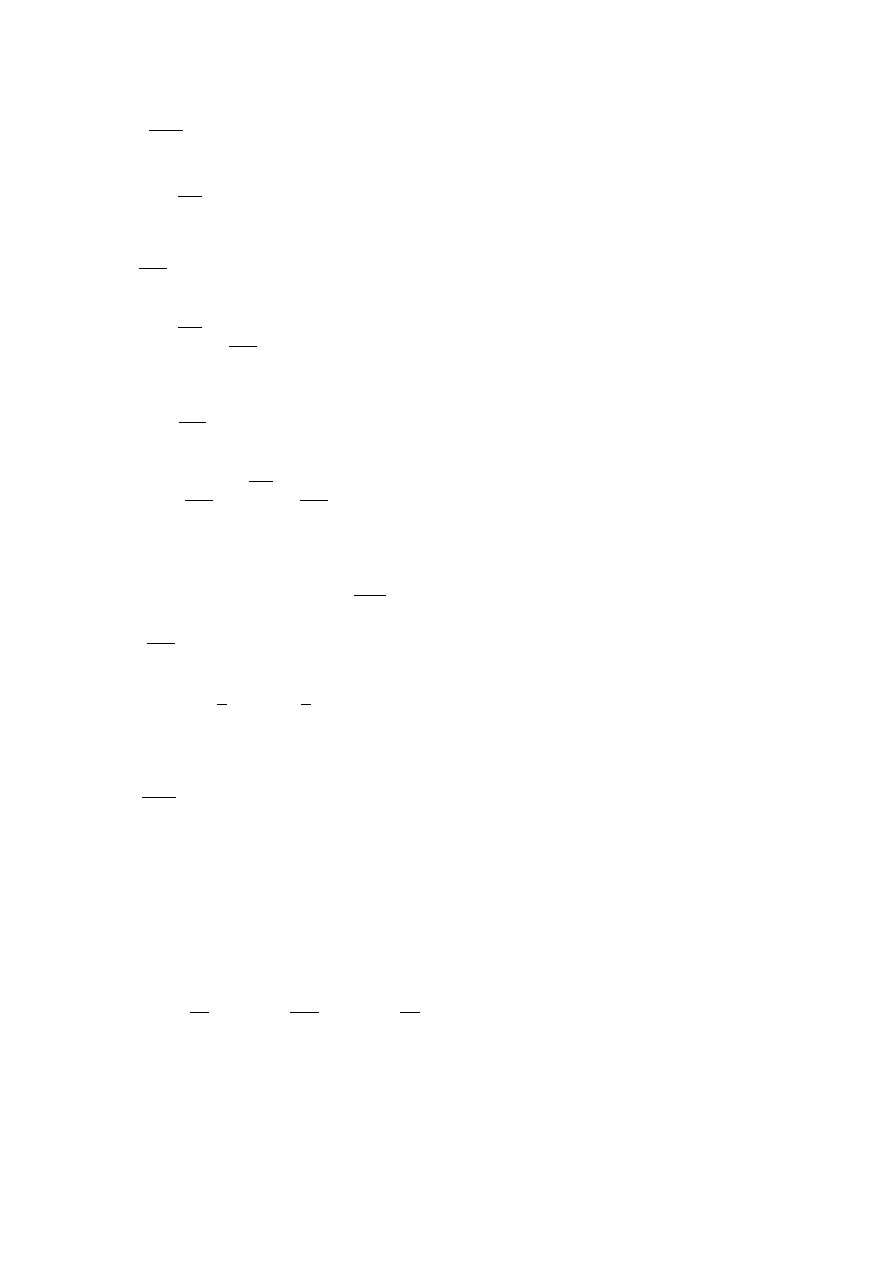
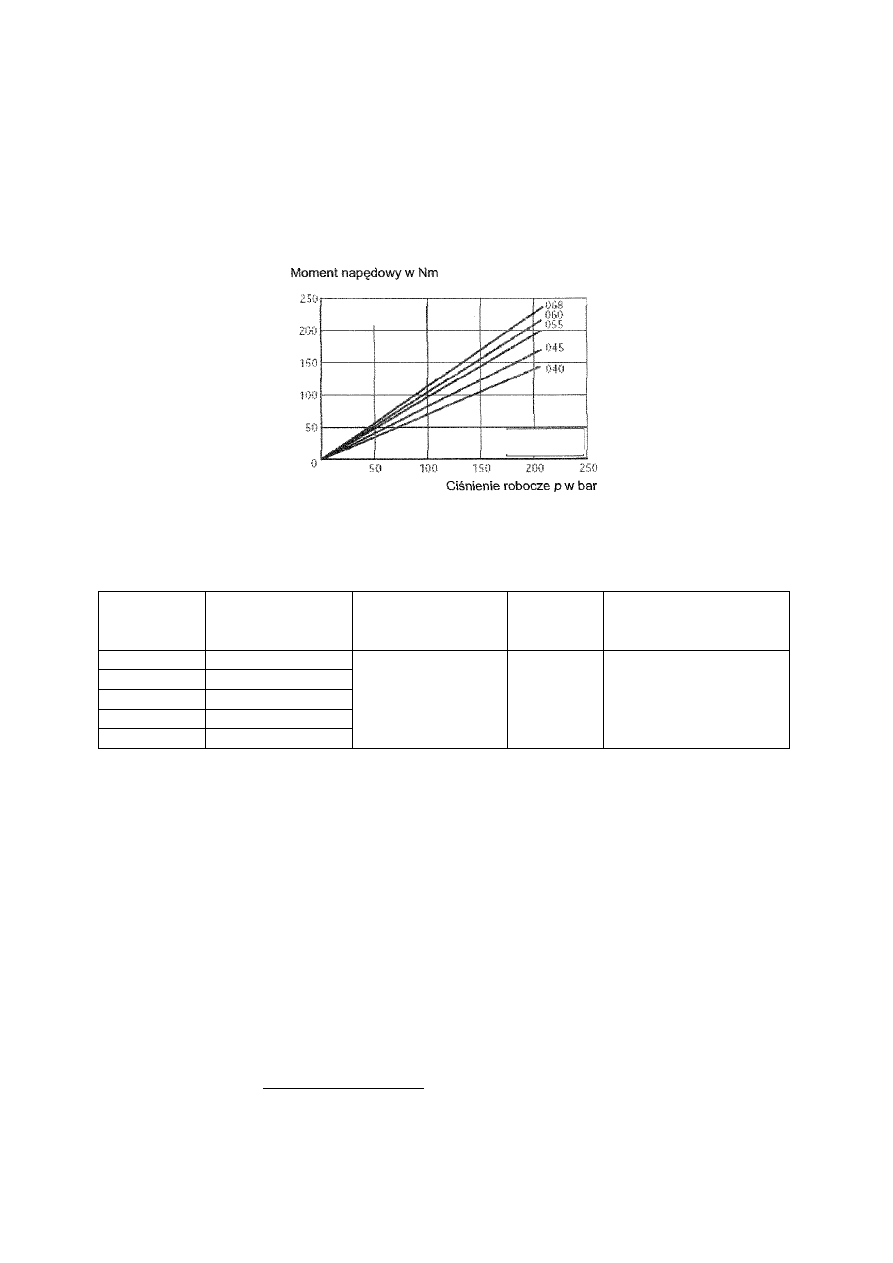
Najłatwiej jest dobrać silnik do maszyny lub urządzenia, które pracuje przy stałym obciążeniu.
Niektórzy producenci urządzeń napędzanych silnikami elektrycznymi podają w katalogach wymaganą
moc, albo wymagany moment obrotowy silnika potrzebnego do napędu tego urządzenia. Na rys.2.3.1
pokazano przykładowy wykres wymaganego momentu obrotowego (napędowego) dla grupy pomp
hydraulicznych. Symbole literowo-cyfrowe oznaczają typ pompy, natomiast symbole cyfrowe przy
liniach – umowne oznaczenie wielkości pompy. Producent informuje, że wykresy zostały wykonane
dla cieczy o lepkości kinetycznej 41 mm
2
/s i temperatury 50
0
C.
.
Rys.2.3.1
Pozostałe dane techniczne pomp wybrane z katalogu, istotne z punktu widzenia doboru silnika, są
następujące:
Wielkość
pompy
Strumień
przepływu w l/min
przy 1500obr/min
Ciśnienie
maksymalne w
barach
Obroty
minimalne
obr/min
Obroty maksymalne
obr/min
040
100
210
600
2500
045
89
055
80
060
66
068
59
Niestety, nie zawsze dysponuje się informacjami jak w powyższym przykładzie i wówczas należy
dobrze poznać budowę i działanie urządzenia do napędu którego dobierany jest silnik.
Rozróżnia się następujące rodzaje pracy silnika:
a) praca ciągła (symbol S1) – silnik pracuje pod stałym obciążeniem i osiąga ustalony przyrost
(nadwyżkę) temperatury;
b) praca dorywcza (symbol S2) – silnik pracuje krócej niż to potrzebne do uzyskania ustalonej
nadwyżki temperatury, a następnie zostaje wyłączony i stygnie aż do temperatury otoczenia;
c) praca okresowa przerywana (symbol S3) – silnik pracuje z przerwami, przy czym podczas
pracy nie zostaje osiągnięta ustalona nadwyżka temperatury, a w okresie wyłączenia nie
zostaje osiągnięta temperatura otoczenia.
Pozostałe rodzaje pracy (S4 do S8) związane są ze sposobem hamowania i rozruchu oraz biegiem
jałowym, natomiast rodzaje S7 i S8 dotyczą dużej liczby załączeń. Szczegółowe informacje można
znaleźć w PN-EN 60034-1-2005
Punkt 2.2 zakończono informacją, że istnieją następujące metody doboru mocy silnika: metoda
średnich strat, prądu zastępczego, momentu zastępczego i mocy zastępczej.
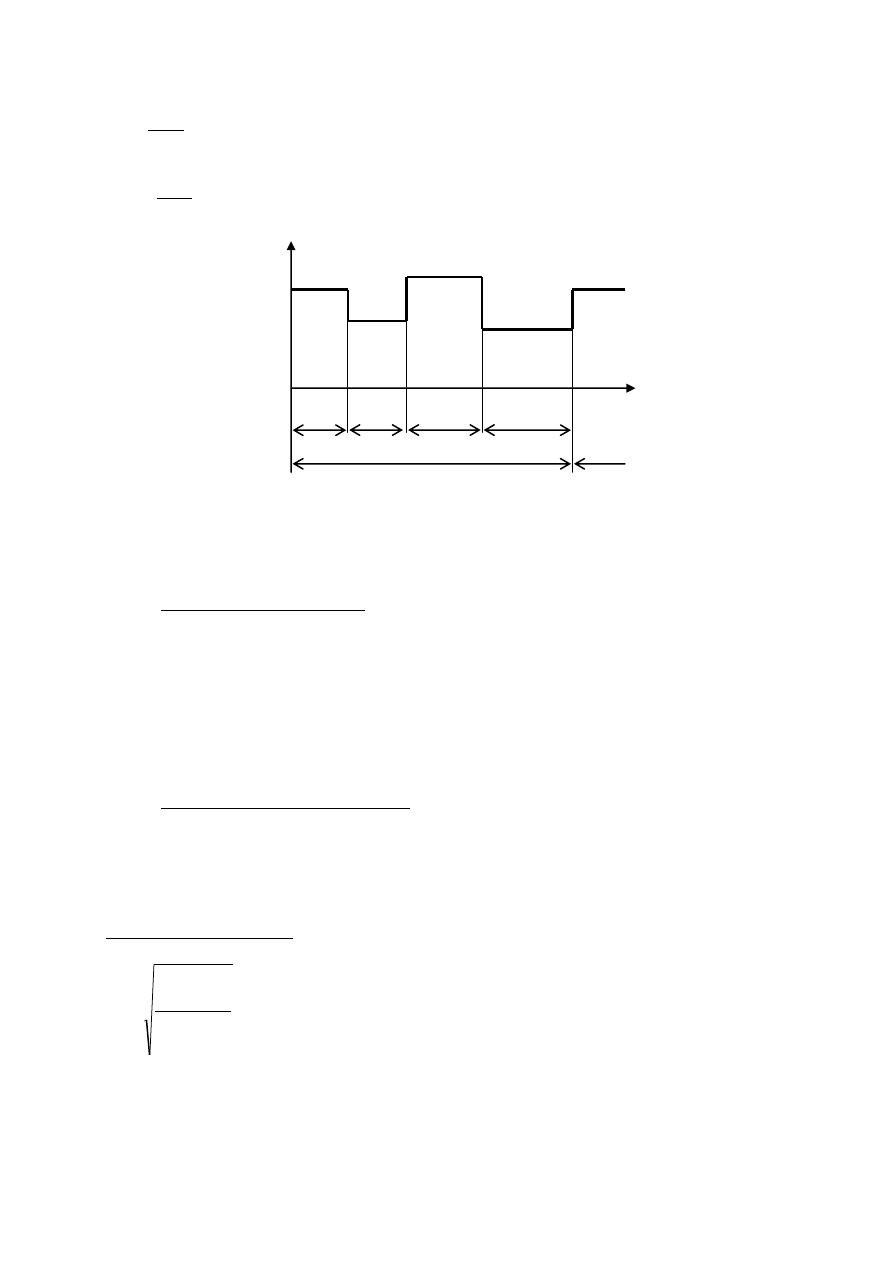
W celu omówienia metody średnich strat rozpatrzmy rys.2.3.2, na którym przedstawiono
przykładowe, zmieniające się w czasie, zapotrzebowanie mocy przez maszynę. Ze wzoru
definiującego sprawność wynika, że straty mocy w silniku wynoszą
7
U
S
P
1
P
czyli jeżeli silnik przekazuje maszynie moc P
1
, to w tym czasie moc tracona jest równa
1
1
P
η
η
1
P
Δ
=
. Podobne zależności można napisać dla ΔP
2
, ΔP
3
, itp.
W tym miejscu należy zauważyć przydatność wykresów obrazujących zależność współczynnika
sprawności od obciążenia takich jak pokazane na rys.2.2.2a. Wykresy te pozwalają obliczać straty
mocy przy uwzględnieniu sprawności charakterystycznej dla danego obciążenia silnika. Średnie straty
mocy w cyklu pracy są równe
4
3
2
1
4
3
3
2
2
1
1
śr
t
t
t
t
P
t
P
t
P
t
P
P
Silnik uznaje się za dobrany prawidłowo jeżeli spełniona jest nierówność
n
śr
P
P
(a)
gdzie symbol
n
P
oznacza straty w silniku obciążonym znamionowo.
Jeżeli w czasie cyklu pracy silnika występują hamowania, postoje i rozruchy, to odpowiadające im
czasy występujące w mianowniku wzoru analogicznego do powyższego, należy pomnożyć przez
współczynniki mniejsze od jedności, bowiem w tych okresach chłodzenie silnika pogarsza się. Jest
więc
P
3
2
H
R
H
H
2
2
2
R
R
śr
t
t
t
)
t
t
(
t
P
...
P
t
P
t
P
P
gdzie dolne indeksy
R
,
H
oraz
P
oznaczają odpowiednio rozruch, hamowanie i postój. Współczynniki
α i β występujące w mianowniku są w przybliżeniu równe
)
6
,
0
4
,
0
(
)
8
,
0
6
,
0
(
Metoda prądu zastępczego polega na wyznaczeniu prądu I
Z
, który spowodowałby takie samo
nagrzanie silnika jak prądy zmieniające się w cyklu pracy. Prąd zastępczy określony jest wzorem
n
1
j
j
n
1
j
j
2
j
Z
t
)
t
I
(
I
(b)
Dobór silnika uważa się za prawidłowy jeżeli spełniony jest warunek
n
Z
I
I
(c)
gdzie I
n
oznacza znamionowy prąd silnika.
czas
P
1
P
4
P
3
P
2
P
1
Cykl pracy
Następny cykl
t
4
t
3
t
2
t
1
moc P
0
Rys.2.3.2

8
Analogiczne do (b) wzory określają moment zastępczy i moc zastępczą, zaś nierówności analogiczne
do (c) - warunki doboru silnika metodą momentu zastępczego i mocy zastępczej.
Dobór mocy silnika do pracy dorywczej i przerywanej jest nieco bardziej złożony, lecz jego istotą, tak
jak w przypadku pracy ciągłej, jest analiza zjawiska nagrzewania i chłodzenia silnika.
Wyszukiwarka
Podobne podstrony:
5 pradnice i silniki id 40384 Nieznany
IMW W02 Dobor napedu id 212334 Nieznany
Dobor regulatorow id 138181 Nieznany
klasyfikacja silnikow id 235931 Nieznany
projekt silniki id 399540 Nieznany
projekt silniki 1 id 399542 Nieznany
Dobor elementow id 138148 Nieznany
5 pradnice i silniki id 40384 Nieznany
Opis silnikow krokowych id 3370 Nieznany
(Sciaga silniki dobra)id 733 Nieznany
ZJAWISKA CIEPLNE W SILNIKU id 5 Nieznany
Dobor srodkow transportu id 138 Nieznany
Parametry silnika SSMT id 34916 Nieznany
Dobor DN ZbP AS skrot SC id 138 Nieznany
Opis silnikow krokowych id 3370 Nieznany
Abolicja podatkowa id 50334 Nieznany (2)
4 LIDER MENEDZER id 37733 Nieznany (2)
katechezy MB id 233498 Nieznany
metro sciaga id 296943 Nieznany
więcej podobnych podstron