HAMOWANIE SILNIKA INDUKCYJNEGO
Wiadomości wstępne
Potrzeba hamowania występuje w dwóch przypadkach: gdy chodzi o zatrzymanie maszyny będącej
w ruchu lub utrzymanie stałej prędkości czy jej ograniczenie. Silniki indukcyjne można hamować jednym
z poniżej podanych sposobów:
hamowanie wybiegiem
hamowanie mechaniczne
hamowanie silnikiem (dynamiczne lub przeciwprądem)
hamowanie odzyskowe
Hamowanie wybiegiem - stosuje się w napędach małej mocy, gdzie czas hamowania nie ma istotnego
znaczenia, a ze strony urządzenia napędzanego nie występuje moment napędowy (tarcze szlifierskie, napędy
wrzecion, małych tokarek itp.). Hamowanie wybiegiem polega na tym, że po wyłączeniu zasilania silnika,
hamowany jest on jedynie poprzez tarcie w łożyskach i przekładniach.
Hamowanie mechaniczne – najbardziej rozpowszechniony sposób hamowania silników – polega na
celowym zwiększaniu tarcia pomiędzy elementem wirującym a dociskanym do niego hamulcem bębnowym.
Hamowanie mechaniczne stosowane może być jako jedyne lub jako współpracujące z hamowaniem
silnikowym, którym nie zawsze można doprowadzić do całkowitego zatrzymania silnika i urządzenia
napędzanego.
+
+
+
+
+
+
-
-
-
-
-
-
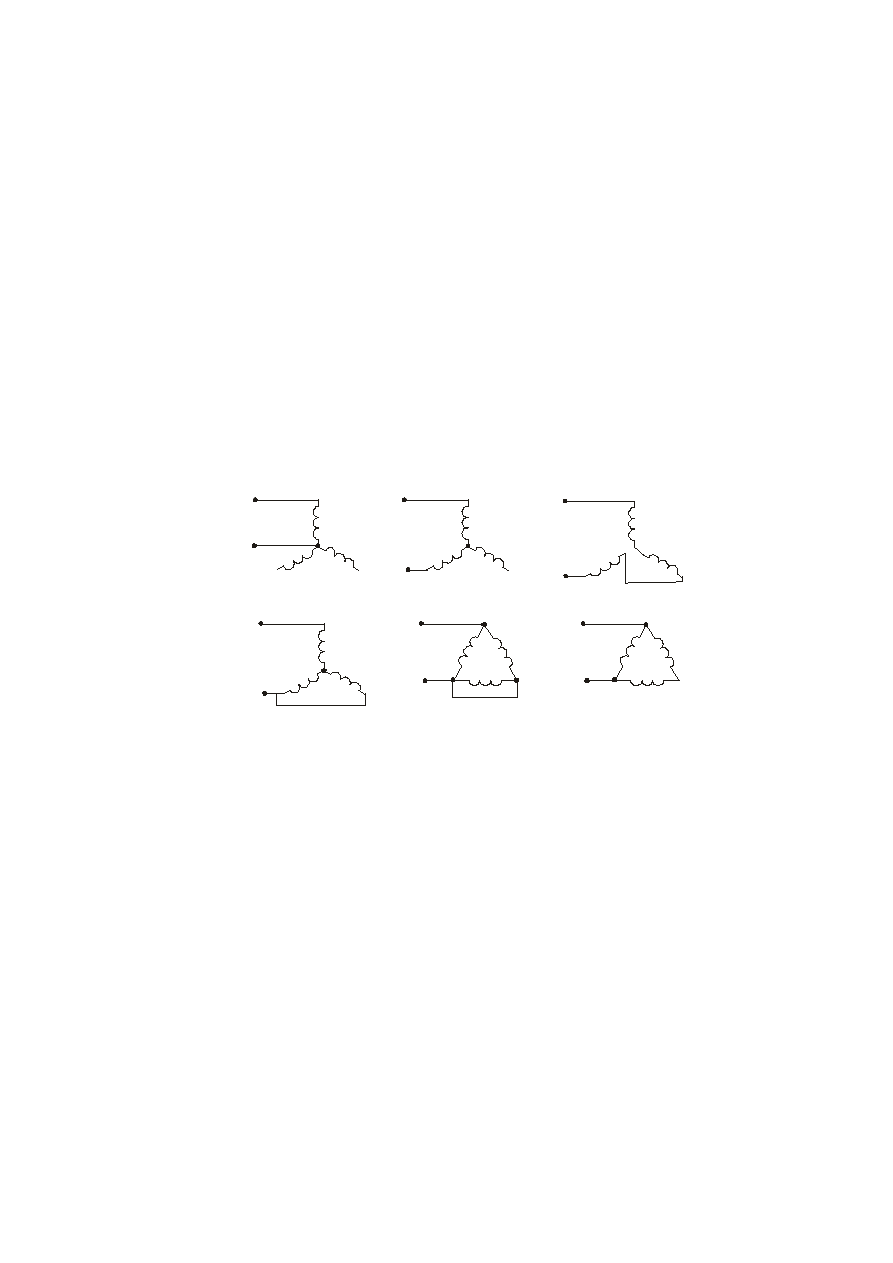
Rys. 12.1. Sposoby zasilania uzwojeń silnika indukcyjnego przy hamowaniu dynamicznym
Hamowanie silnikiem – elektryczne, jest sposobem najskuteczniejszym, ze względu na to, że
wytworzony poprzez silnik moment hamujący może być równy, a często i większy od momentu
znamionowego silnika. Silnik elektryczny hamowany tym sposobem może być więc hamowany bardzo
szybko. Hamowanie silnikowe może być realizowane dynamicznie – prądem stałym lub przemiennym
jednofazowym, albo przeciwprądem.
Hamowanie dynamiczne silnika indukcyjnego polega na tym, że po odłączeniu go od sieci (po zakończeniu
normalnej pracy silnikowej), włącza się uzwojenia stojana połączone wg jednego ze sposobów z rysunku
12.1. do sieci prądu stałego lub przemiennego jednofazowego. Przy hamowaniu dynamicznym prądem
stałym silnika asynchronicznego wytwarzany jest poprzez stały prąd stojana stały w czasie i przestrzeni
strumień magnetyczny. Strumień ten indykuje w wirujących uzwojeniach wirnika siłę elektromotoryczną,
która powoduje w zamkniętym jego uzwojeniu przepływ prądu. Prąd ten współdziałając ze strumieniem
stojana daje, zgodnie z regułą Lenza, efekt hamowania wirnika. Tak hamowany silnik indukcyjny można
porównać z generatorem synchronicznym pracującym przy zmiennej częstotliwości. Uzwojenie wirnika
silnika indukcyjnego spełnia analogiczną rolę, jak obwód obciążenia generatora. Przy tym hamowaniu silnik
nie może być wyhamowany do końca, jeśli w chwili rozpoczęcia hamowania silnika urządzenie napędzane
staje się urządzeniem napędzającym. W takim przypadku ustala się pewna prędkość obrotowa silnika
pracującego hamulcowo, będąca równowagą momentów: napędzającego i hamującego. Aby całkowicie
zatrzymać urządzenie będące w ruchu należy „dohamować” je mechanicznie. Wartość momentu
hamującego zależy od wielkości stałego strumienia wytworzonego w stojanie, a poślizg krytyczny, podobnie
jak przy pracy silnikowej, jest określony przez rezystancję obwodu wirnika. Poprzez zmianę tych wielkości
(strumienia i rezystancji dodatkowej R
d
wtrąconej w obwód wirnika) można wpływać na przebieg
hamowania. Na strumień można wpływać poprzez zmianę prądu, lub zmieniając sposób połączenia uzwojeń
stojana przy hamowaniu. Wpływ prądu i rezystancji R
d
na moment hamujący M
h
przy hamowaniu został
przedstawiony na rysunku 12.2. Napięcie źródła prądu zasilającego stojan silnika ma wielokrotnie niższą
1
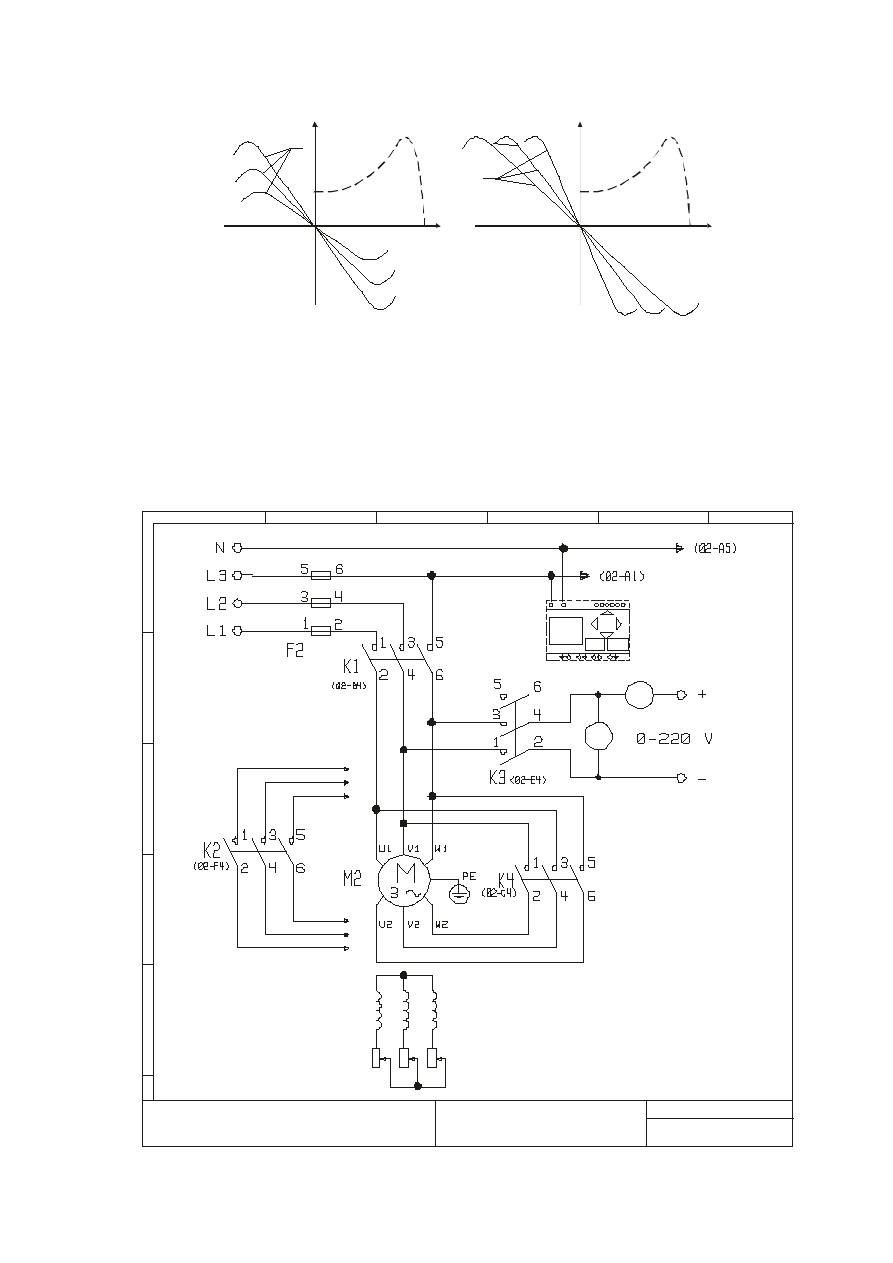
wartość od znamionowego napięcia prądu przemiennego, co wynika stąd, że w stanie ustalonym uzwojenia
przedstawiają dla prądu stałego tylko rezystancję.
M
M
n
n
I
R
R
R
R
= 0
I
I
I
I
1
d
d 1
d 1
d 2
1
3
2
2
<
<
<
a )
b )
M
h
M
h
Rys. 12.2. Charakterystyki mechaniczne maszyny indukcyjnej pierścieniowej przy hamowaniu dynamicznym: a) wpływ
wartości prądu stałego, b) wpływ rezystancji dodatkowej w obwodzie wirnika
Przy hamowaniu dynamicznym prądem przemiennym jednofazowym wytworzone w stojanie pole
magnetyczne jest polem pulsującym, które rozkłada się na składowe: zgodną i przeciwną. Istotnym
warunkiem przy tym sposobie hamowania jest to, aby rezystancja wtrącona w obwód zapewniała poślizg
krytyczny większy od jedności. Ten sposób hamowania, ze względu na pulsujący charakter pola
magnetycznego jest dużo mniej skuteczny od hamowania dynamicznego prądem stałym – przy którym
wytwarzane jest stałe pole magnetyczne.
1
2
3
4
5
A
B
C
D
E
F
ILO ŚĆ RYSUN KÓ W
W PR O J EKC IE
NUMER
RYSUNKU
Hamowanie silnika indukcyjnego
OBWODY MOCY
2
01
A
V
uzw.
wirnika
R
d
ESC OK
N
L1
Rys.12.3 . Schemat obwodów mocy do hamowania silnika indukcyjnego prądem stałym
2
Hamowanie przeciwprądem silnika asynchronicznego polega na wytworzeniu przez uzwojenie stojana
strumienia magnetycznego wirującego przeciwnie do aktualnego kierunku obracania się silnika.
Wytworzenie takiego strumienia jest spowodowane zamianą miejscami dwu faz zasilających stojan.
Strumień ten powoduje wytworzenie w uzwojeniach wirnika siły elektromotorycznej, pod wpływem której
w uzwojeniach tych płyną prądy o dużych wartościach. Z uwagi na to, że pola magnetyczne stojana i
wirnika wirują przeciwnie względem siebie, to wytwarzają efekt silnego hamowania. Na przebieg
hamowania przeciwprądem silnika pierścieniowego można wpływać poprzez zmianę rezystancji dodatkowej
R
d
wtrąconej w obwód wirnika lub przez zmianę układu połączeń obwodu stojana (gwiazda lub trójkąt).
Pierwszy sposób nie powoduje zmian wartości momentu – zmienia jedynie wartość poślizgu krytycznego,
przy którym występuje maksimum momentu. Hamowanie przeciwprądem występuje w zakresie poślizgu
większego od jedności.
Hamowanie odzyskowe. Maszyna indukcyjna pracująca przy prędkości nadsynchronicznej (s<0) może
być wykorzystana do celów hamowania. Hamowanie to nie jest możliwe przy prędkości mniejszej niż
synchroniczna, co znacznie ogranicza zakres stosowania tego sposobu hamowania. W czasie pracy
z prędkością większą od synchronicznej maszyna wiruje w jednym kierunku a moment elektromagnetyczny
działa w kierunku przeciwnym co świadczy o pracy hamulcowej. W czasie hamowania energia kinetyczna
układu jest zamieniana w energię elektryczną i oddawana do sieci oraz częściowo tracona w maszynie.
Zasada pracy układu sterowania dynamicznym hamowaniem prądem stałym w funkcji czasu
silnika indukcyjnego.
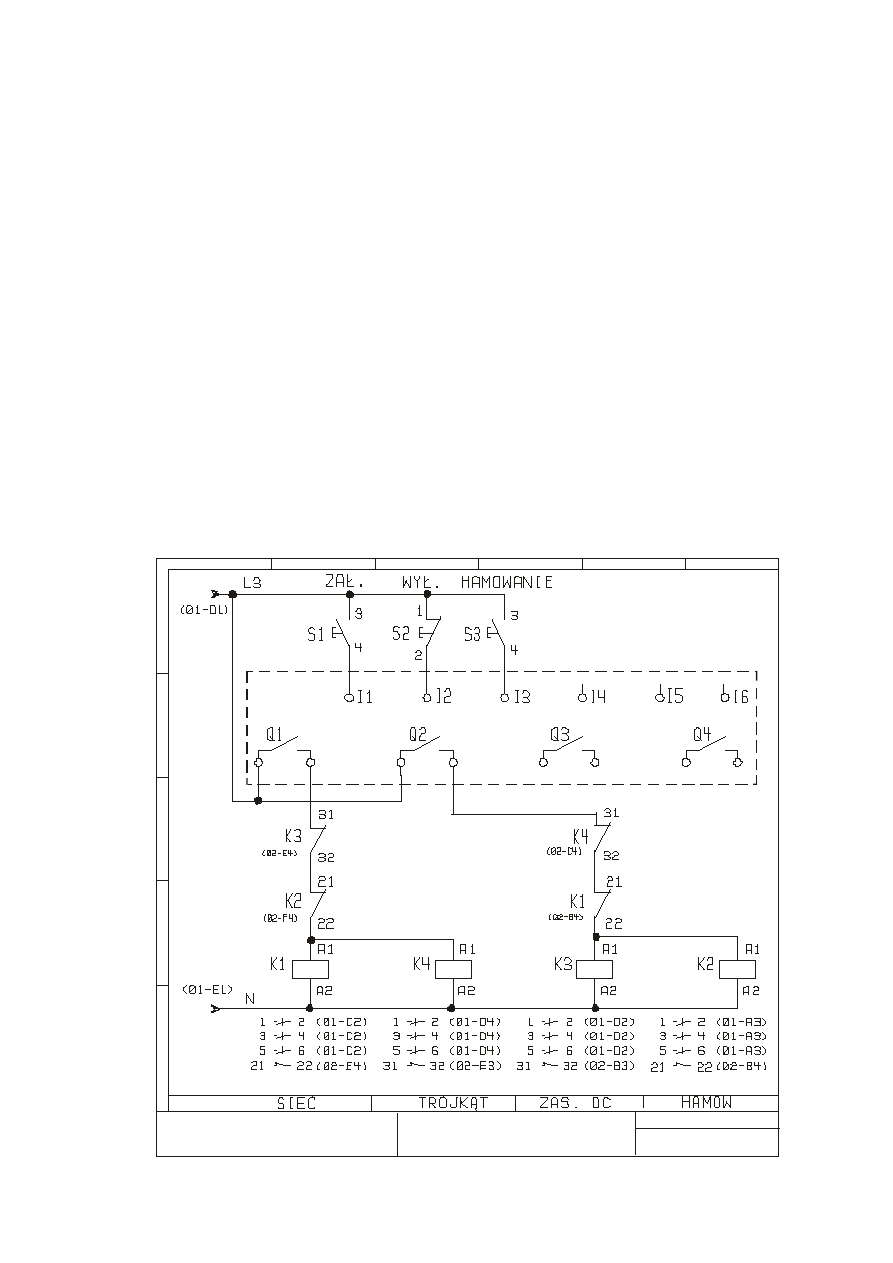
Układ przedstawiony na rysunkach 12.3 i 12.4. umożliwia dokonanie dynamicznego hamowania
silnikiem pierścieniowym w warunkach laboratoryjnych. Hamowanie może być przeprowadzone przy
różnych prądach stałych nastawionych poprzez zmianę napięcia stałego, różnych rezystancjach R
d
,
wtrąconych w obwód wirnika, a także różnych skojarzeniach uzwojeń możliwych do wybrania z rysunku
12.1. Różne skojarzenia otrzymuje się poprzez odpowiednie połączenie zestyków mocy stycznika K2.
Opis sposobu programowania modułu logicznego, oraz opis dokumentacji elektrycznej znajduje się
w § 14.
ILO ŚĆ RYSUN KÓ W
W PR O J EKC IE
2
NUMER
RYSUNKU
02
Hamowanie silnika indukcyjnego
OBWODY STEROWANIA
1
2
3
4
5
A
B
C
D
E
F
Rys. 12.4. Schemat obwodów sterowania do hamowania silnika indukcyjnego prądem stałym
3
Załączenie układu odbywa się poprzez wciśnięcie łącznika S1. Powoduje to zwarcie przekaźnika Q1
modułu programowalnego, podanie napięcia na cewki styczników K1 i K4. Rozwierają się zestyki
rozwierne tych styczników, a zwierają zestyki mocy. Układ zaczyna pracować w pracy silnikowej przy
uzwojeniach stojana skojarzonych w trójkąt. Po uzyskaniu przez silnik prędkości znamionowej można
przystąpić do jego hamowania dynamicznego prądem stałym. W tym celu należy przycisnąć łącznik S3.
Powoduje to rozłączenie przekaźnika Q1 modułu logicznego. Cewki styczników K1 i K4 zostają odłączone
od napięcia, co w efekcie daje odłączenie silnika od sieci trójfazowej i rozłączenie uzwojeń stojana. Po
zwłoce czasowej (ok. 0,1s) następuje załączenie przekaźnika Q2 modułu logicznego.
I2
T=2s
T=0,1s
B05
B04
I3
x
x
I1
I3
Q1
Załącz
Sieć
B01
B03
B07
B08
T=0,1s
I2
Hamowanie
Wyłącz
B06
B02
Hamowanie
a)
Q1
Q2
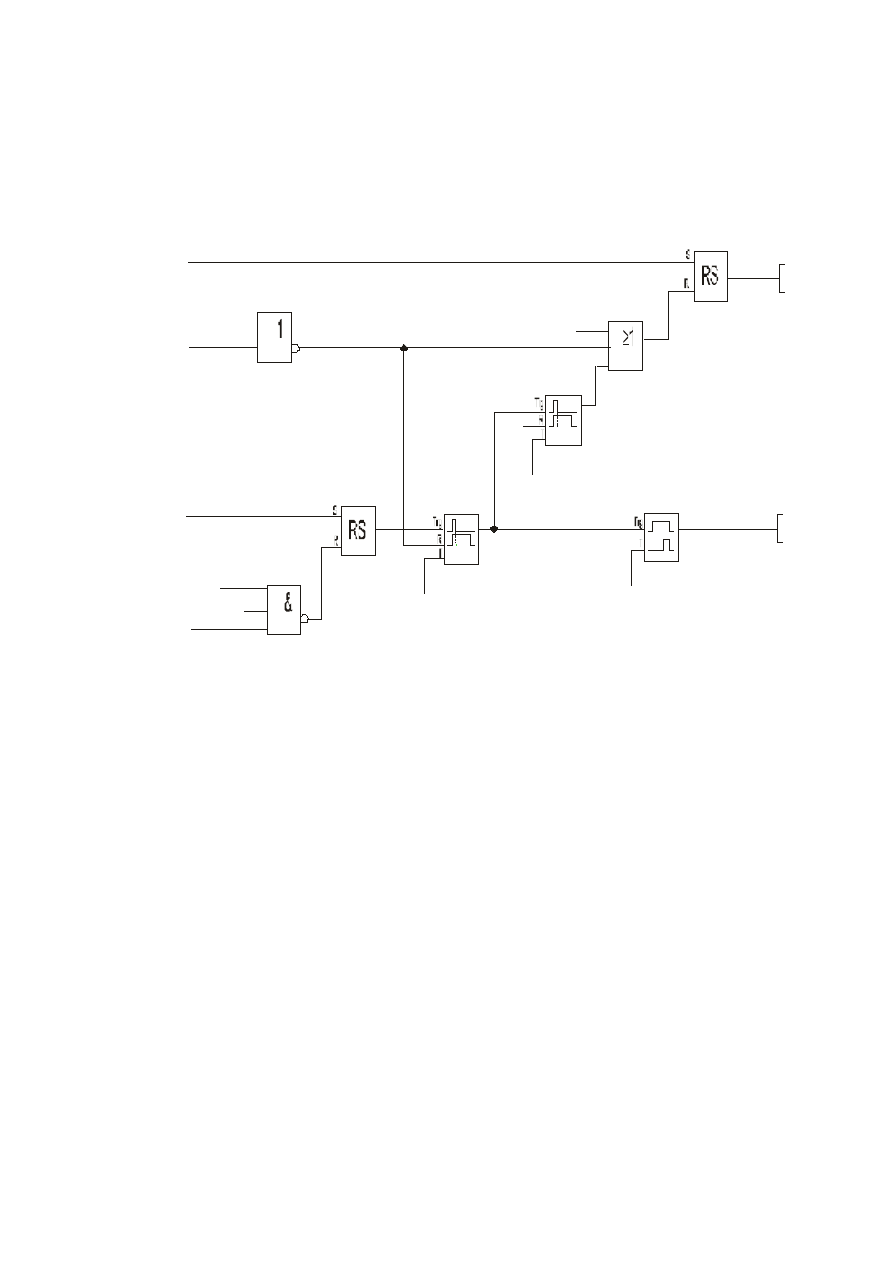
Rys. 12.5. Program do hamowania silnika pierścieniowego prądem stałym
Powoduje to podanie napięcia na cewki styczników K2 i K3, rozwarcie zestyków pomocniczych,
a następnie zwarcie zestyków mocy tych styczników. Zostaje podłączone napięcie stałe, a silnik skojarzony
w zależności od sposobu podłączenia zestyków mocy stycznika K2. Po czasie ustawionym w module
programowalnym następuje rozłączenie całego układu. Powtórne załączenie hamowania jest możliwe
dopiero po ponownym rozruchu silnika. Przyciśnięcie łącznika S2 powoduje rozłączenie silnika zarówno
w pracy silnikowej jak i hamulcowej. Należy zwrócić uwagę, że w przycisku S2 wykorzystano zestyk
rozwierny. Może to stanowić zabezpieczenie przed zanikiem napięcia, lub przed ponownym rozruchem
w przypadku zadziałania zabezpieczenia termicznego .
Na rysunku 12.5. przedstawiono programy modułu logicznego do hamowania prądem stałym
i przeciwprądem.
12.1. Cel ćwiczenia
Celem ćwiczenia jest zapoznanie się z metodami hamowania silników indukcyjnych, układami
automatyki występującymi w badanych metodach, oraz obserwacja zjawisk występujących przy hamowaniu
silnika.
12.2. Przebieg ćwiczenia
12.2.1. Zapoznanie się z aparaturą
Przed rozpoczęciem ćwiczenia należy zapoznać się z charakterystycznymi danymi aparatury
przeznaczonej do wykonania ćwiczenia (rodzaje aparatów, napięcia, prądy znamionowe).
4
12.2.2. Wprowadzenie programu do modułu logicznego
Zaprogramować moduł logiczny odpowiednio do rodzaju hamowania, zwracając szczególną uwagę na
wpisanie odpowiednich czasów w blokach opóźnionego załączenia i wyłączenia. Opis sposobu
programowania i bloków logicznych znajduje się w § 14.
12.2.3. Zmontowanie i uruchomienie układu
Zmontować układ odpowiedni do rodzaju hamowania w taki sposób, aby najpierw dokonać sprawdzenia
poprawności działania samego obwodu sterowania. Po stwierdzeniu prawidłowej kolejności zamykania
i otwierania się poszczególnych elementów i właściwego działania blokad można uruchomić również
obwody mocy.
12.2.4. Badanie hamowania dynamicznego prądem stałym
Przeprowadzić hamowanie dla następujących wartości prądu stałego: I
s
= (0,25; 0,5; 0,75; 1; 1,25)I
N
(I
N
znamionowy prąd silnika), dla swobodnego wybiegu (I
s
=0), oraz dla dwóch różnych wartości
rezystancji R
d
włączonych w obwód wirnika i R
d
= 0. Badanie hamowania przeprowadzić dla jednego
wybranego z rysunku 12.1. układu połączeń uzwojeń. Przy każdej próbie odczytać wartość napięcia, prądu
i czasu hamowania. Wyniki wpisuje się w tabeli 12.1. Na podstawie pomiarów wykonuje się
charakterystyki:
)
R
(
f
t
);
P
(
f
t
);
I
(
f
t
d
h
h
s
h
.
s
s
I
U
P
Tabela 12.1.
U
s
I
s
t
h
R
d
=0
R
d1
R
d2
Dla różnych I
s
oraz R
d
zarejestrować przy pomocy oscyloskopu przebiegi
)
(t
f
n
.
12.3. Sprawozdanie.
Sprawozdanie powinno zawierać:
dane znamionowe i opis badanych układów
charakterystyki
)
(t
f
n
,
)
(
);
(
d
h
s
h
R
f
t
I
f
t
; dla różnych R
d
, I
s
, oraz dla swobodnego wybiegu
przy hamowaniu dynamicznym - obliczenia wartości strat mocy i charakterystyki
)
P
(
f
t
h
, dla
różnych prądów hamowania I
s
wnioski i spostrzeżenia.
5
Wyszukiwarka
Podobne podstrony:
Rozruch i hamowanie silnika indukcyjnego klatkowego, wojtek studia, Automatyka, studia 2010
Pomiary Automatyka Robotyka 12 Nieznany
automatyka10001 id 73404 Nieznany
automatyka i sterowanie wyklad Nieznany (8)
automatyka i sterowanie wyklad Nieznany (2)
Podstawy Automatyki Egzamin pyt Nieznany
Motul Produkty Osobowe Silnik S Nieznany
Automatyzacja w OiK (cwiczenie Nieznany
hamowanie silnika cisnieniem
automatyka id 73112 Nieznany (2)
Naped z bezszczotkowym silnikie Nieznany
automaty id 72943 Nieznany (2)
Automatyzacja w KiC (cwiczenie Nieznany (5)
automatyka i sterowanie wyklad Nieznany (7)
automatyczny sterownik oswietle Nieznany (2)
automatyka i sterowanie wyklad Nieznany (14)
Automatyzacja i robotyzacja pro Nieznany
Automatyczna analiza wilekosci Nieznany
więcej podobnych podstron