Spis treści
Wstęp..........................................................................................................5
1. Przegląd stosowanych systemów sterowania i kontroli
na dużych odległościach......................................................................6
1.1. Systemy wykorzystujące sieć internetową do sterowania i
kontroli urządzeń........................................................................7
1.2. Systemy wykorzystujące sieć energetyczną do sterowania i
kontroli urządzeń.......................................................................15
2. Charakterystyka rozległej sieci TCP/IP pod kątem możliwości
jej
wykorzystania w systemach sterowania i kontroli.....................18
2.1. Warstwowy model sieci TCP/IP..............................................19
2.2. Protokół TCP............................................................................22
2.3. Protokół UDP...........................................................................25
2.4. Protokół IP................................................................................26
2.5. Protokół ICMP.........................................................................29
3. Propozycje sposobów przyłączania nadzorowanych urządzeń
do sieci TCP/IP ...................................................................................32
3.1. Sterownik jako konwerter między siecią TCP/IP
a urządzeniem.........................................................................33
4. Projekt sterownika mikroprocesorowego umożliwiającego
zadawanie i odczyt stanów urządzeń poprzez sieć TCP/IP.............34
4.1. Wybór mikrokontrolera...........................................................35
4.2. Projekt schematu blokowego...................................................41
4.3. Blok mikrokontrolera..............................................................43
4.4. Blok pamięci............................................................................44
4.5. Blok PHY................................................................................46
4.6. Blok RTC i adresu MAC........................................................49
4.7. Blok zasilania..........................................................................50
4.8. Blok interfejsu.........................................................................51
4.9. Przystawka do odczytu temperatury oraz
włączania diody LED..............................................................53
4.10. Wykaz elementów..................................................................54
5. Wykonanie i uruchomienie zaprojektowanego sterownika.............56
5.1. Projekt płytki drukowanej.........................................................57
5.2. Wykonanie sterownika..............................................................60

4
5.3. Zainstalowanie środowiska wykonawczego do sterowania.....62
5.4. Uruchomienie przykładowych aplikacji...................................65
6. Przeprowadzeni badań wykonanego sterownika w warunkach
przyłączenia go do wybranych sieci TCP/IP....................................68
6.1. Analiza przepływu danych sterownika podłączonego
do sieci LAN przy wykorzystaniu programu IRIS..................69
Podsumowanie.....................................................................................71
Literatura.............................................................................................72
Załączniki:
Płyta CD

5
Wstęp
Etap mikroprocesorowej rewolucji, która dokonała się w minionym 20-
leciu w obszarze urządzeń powszechnego użytku, na trwałe skomputeryzował
sprzęt gospodarstwa domowego,
sprzęt audio-video czy też branżę
motoryzacyjną. Obsługa tych urządzeń wcale nie musi się odbywać bezpośrednio
przez użytkownika, już dziś mamy wiele systemów sterujących czy też
kontrolujących stan tych urządzeń na odległość. Technologie do centralnego
zarządzania sprzętem powszechnego użytku są rozwijane przez większość
liczących się producentów podzespołów elektronicznych. Sieci internetowe,
które dotąd były wykorzystywane przeważnie do świadczenia usług WWW
(World Wide Web), mogą być wykorzystywane teraz do sterowania i kontroli
innych urządzeń. Wiele urządzeń domowego użytku w przyszłości może być
wyposażone w charakterystyczne gniazdo RJ – 45, np. piekarnik, który może
otrzymywać przepisy kulinarne z internetowej bazy, telewizor kontrolowany
zdalnie przez komputer PC lub magnetowid programowany za pomocą
sieciowego interfejsu.
Celem niniejszej pracy jest charakterystyka sieci TCP/IP pod względem
zastosowania do sterowania i kontroli urządzeń oraz projekt sterownika
umożliwiającego zadawanie i odczyt stanów urządzeń poprzez sieć TCP/IP.

6
1. Przegląd stosowanych systemów
sterowania i kontroli na dużych
odległościach
W rozdziale pierwszym pracy przedstawiono systemy
wykorzystujące sieci internetowe oraz sieci energetyczne do sterowania i
kontroli urządzeń.

7
1.1. Systemy wykorzystujące sieć internetową do
sterowania i kontroli urządzeń
Obecnie jest wiele firm produkujących systemy sterowania i kontroli
urządzeń przez sieć typu Ethernet/Internet. Systemy te charakteryzują się szeroką
gamą urządzeń z nimi współpracujących. Prekursorem zasługującym na uwagę
była firma Dallas Semiconductor a obecnie Maxim/Dallas [1], która
zaproponowała w 1998 roku miniaturowe moduły programowalne w języku
Java, służące do kontroli domowych urządzeń elektrycznych. Medium
komunikacyjne stanowiła w tym przypadku domowa sieć energetyczna . Jednak,
proponowane od roku 1999 rozwiązania bazują na sieci Ethernet i protokołach
standardu TCP/IP. Są to mikroserwery TINI oparte na 8-bitowym
mikrokontrolerze z zaimplementowanym w pamięci stosem TCP/IP. Powszechny
w większości krajów rozwiniętych dostęp do sieci LAN/WAN i jej globalny
zasięg oferuje duże możliwości dla obszaru urządzeń powszechnego użytku
współpracujących z mikroserwerami TINI ( rys. 1.1).
Rys. 1.1. Obszar zastosowań mikroserwerów TINI do sterowania i kontroli
urządzeń (na podstawie materiałów firmy Maxim/Dallas).
Wbudowane w moduł mikroserwera TINI środowisko uruchomieniowe
JVM (Java Virtual Machine), w tym biblioteka java.net do obsługi warstwy
8
gniazd protokołu TCP/IP, pozwoliły na realizację następujących protokołów
warstwy aplikacyjnej: HTTP (Hypertext Transfer Protocol), DNS (Domain
Name System), DHCP (Dynamic Host Configuration Protocol) , Telnet oraz FTP
(File Transfer Protocol). Schemat blokowy modułu TINI został przedstawiony
na rysunku 1.2.[2]
Rys.1.2. Schemat blokowy modułu TINI firmy Maxim/Dallas
W pamięci modułu oprócz stosu TCP/IP i JVM zaimplementowany jest też
prosty system operacyjny RTOS zarządzający obsługę stosu i uruchamiania
aplikacji. Aplikacje są pisane w języku java i wykonywane na mikroserwerze
przez JVM po wcześniejszym skompilowaniu i odpowiednim przygotowaniu
plików. Pomiędzy warstwą aplikacyjną a warstwą protokołów pośredniczy
interfejs gniazd odwzorowujący zunifikowane żądania aplikacji na działania
specyficzne dla implementacji protokołów transportowych (TCP, UDP). Poniżej
warstwy sieci (IP) znajdują się programy komunikujące się z urządzeniami
sieciowymi - kontrolerem Ethernet lub z modemem - za pośrednictwem łącza
szeregowego i protokołu PPP (Point-to-Point Protocol). Urządzeniem sieciowym
wbudowanym w moduł mikroserwera jest kontroler Ethernet obsługujący
standard 10Base-T i 100Base-TX pozwalający na bezpośrednie podłączenie
9
modułu do sieci LAN (Local Area Network). Mikroserver TINI charakteryzuje
się szerokim zestawem interfejsów z urządzeniami zewnętrznymi. Jest on
wyposażony w rozszerzony port I/O, dwa porty szeregowe, interfejs 1-Wire,
magistralę CAN oraz złącze dla układów iButton [3] firmy Maxim/Dallas.
Mikroserver wyposażony jest też w układ RTC (Real Time Clock) mierzący czas,
który może być używany przez użytkownika w niektórych aplikacjach. Cały
mikroserver występuje w postaci dwóch oddzielnych płytek tzn. modułu o
oznaczeniu TINI390 zawierającego mikrokontroler, pamięć i kontroler
Ethernetu oraz z płytki o symbolu E10 wyposażonej we wszystkie niezbędne
interfejsy mikroserwera do komunikacji z urządzeniami zewnętrznymi i
pozostałe układy do jego pracy. Obie płytki łączą się za pomocą gniazda 72 Pin
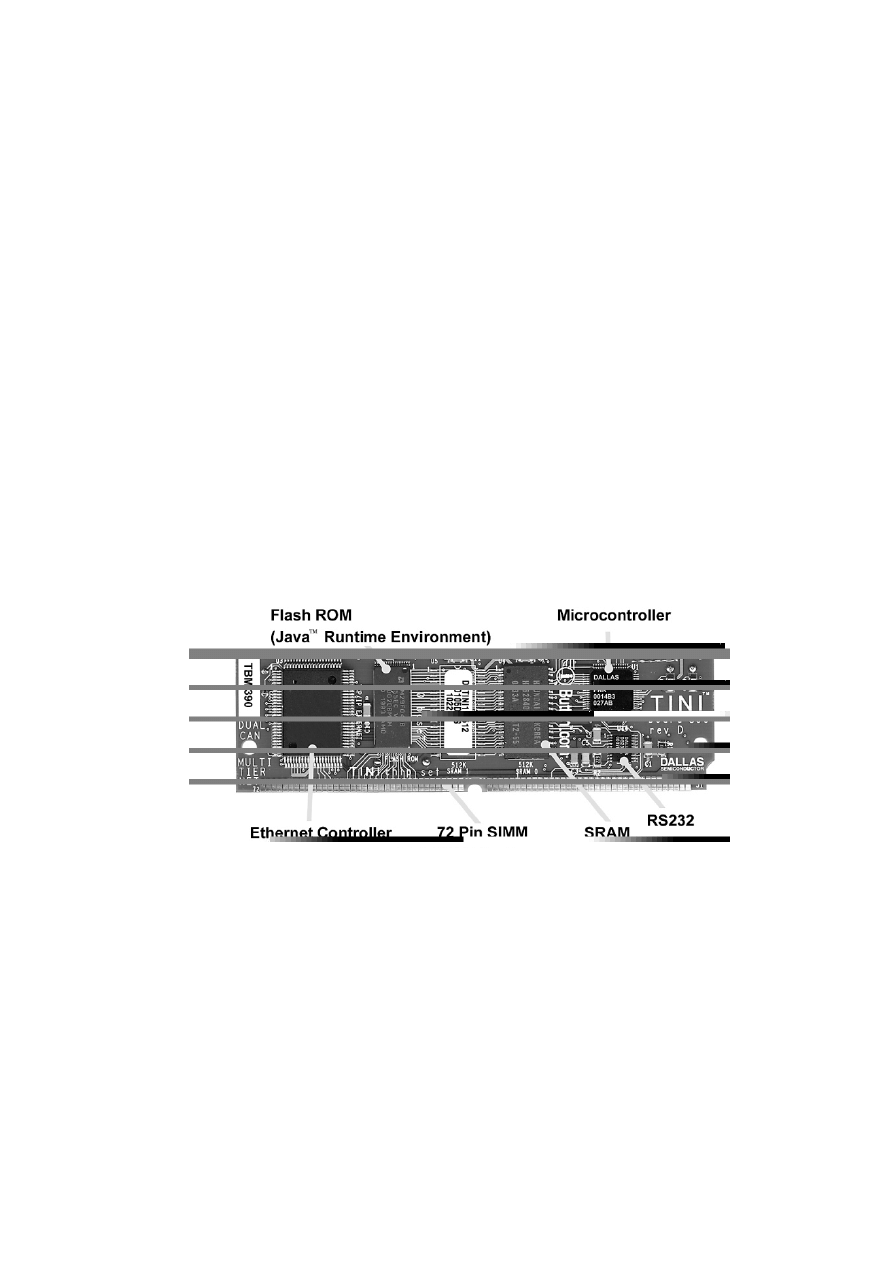
SIMM. Na rysunku 1.3. przedstawiony jest wygląd modułu TINI390 bazującego
na mikrokontrolerze DS80C390. [3]
Rys.1.3. Widok modułu TINI390 firmy Maxim/Dallas
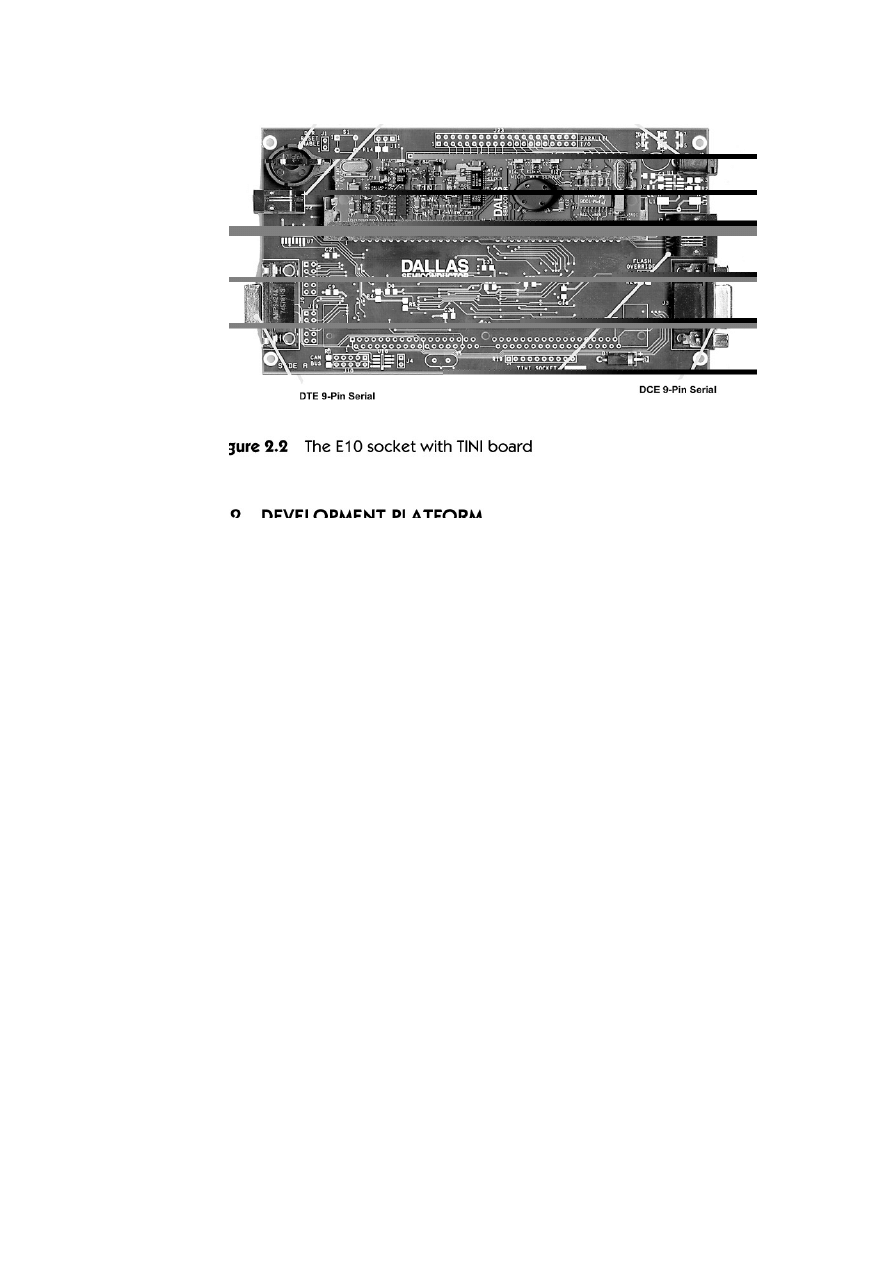
Na rysunku 1.4. przedstawiony jest widok kompletnego mikroserwera
(płyta E10 z modułem TINI390). [3]
10
Rys.1.4. Widok kompletnego mikroserwera TINI firmy Maxim/Dallas
Zainstalowany w module system operacyjny RTOS umożliwia
nawiązanie połączeń FTP z innymi stacjami w sieci, skonfigurowanie połączenia
sieciowego lub ustawianie czasu mierzonego przez układ RTC. W zależności od
aplikacji wykonywanej przez JVM mikroserwera TINI możliwe jest sterowanie
lub kontrola urządzeń dołączonych do odpowiedniego interfejsu mikroserwera
poprzez sieć TCP/IP. Producent udostępnia wiele przykładowych aplikacji
wykorzystujących sieć TCP/IP do obsługi innych urządzeń dołączonych do
modułu TINI. Interfejs graficzny użytkownika między stanem urządzeń może
stanowić przeglądarka internetowa.
Innym przykładem systemów do sterowania i kontroli urządzeń na
dużych odległościach mogą być konwertery RS-232 – Ethernet . Obecnie jest
dużo firm produkujących takie konwertery, można spotkać również firmy
krajowe produkujące te urządzenia. Jedną z takich firm jest firma
ESP Sp. z o.o.
11
produkująca konwerter RS232-ETHERNET [4], wygląd tego konwertera jest
przedstawiony na rysunku 1.5.
Rys. 1.5. Konwerter RS-232 / ETHERNET firmy ESP
Konwerter RS232/ETHERNET zbudowany jest w oparciu o
mikrokontroler 8-bitowy, obsługuje standard 10Base-T Ethernetu oraz umożliwia
współpracę za pośrednictwem sieci Ethernet z dowolnym urządzeniem
wyposażonym w łącze szeregowe RS232 (lub RS485). Urządzenie z łączem
szeregowym widziane jest jako lokalne urządzenie posiadające unikalny adres.
Dostęp do niego uzyskiwany jest za pośrednictwem protokołu TCP. Dzięki temu
w prosty sposób można monitorować, sterować lub konfigurować urządzenia
rozproszone praktycznie po całym świecie. Oczywiście jeśli nie zachodzi taka
potrzeba, to można ograniczyć się do sieci lokalnej i przy jej wykorzystaniu
zbierać oraz gromadzić na jednym komputerze np. dane pomiarowe z całego
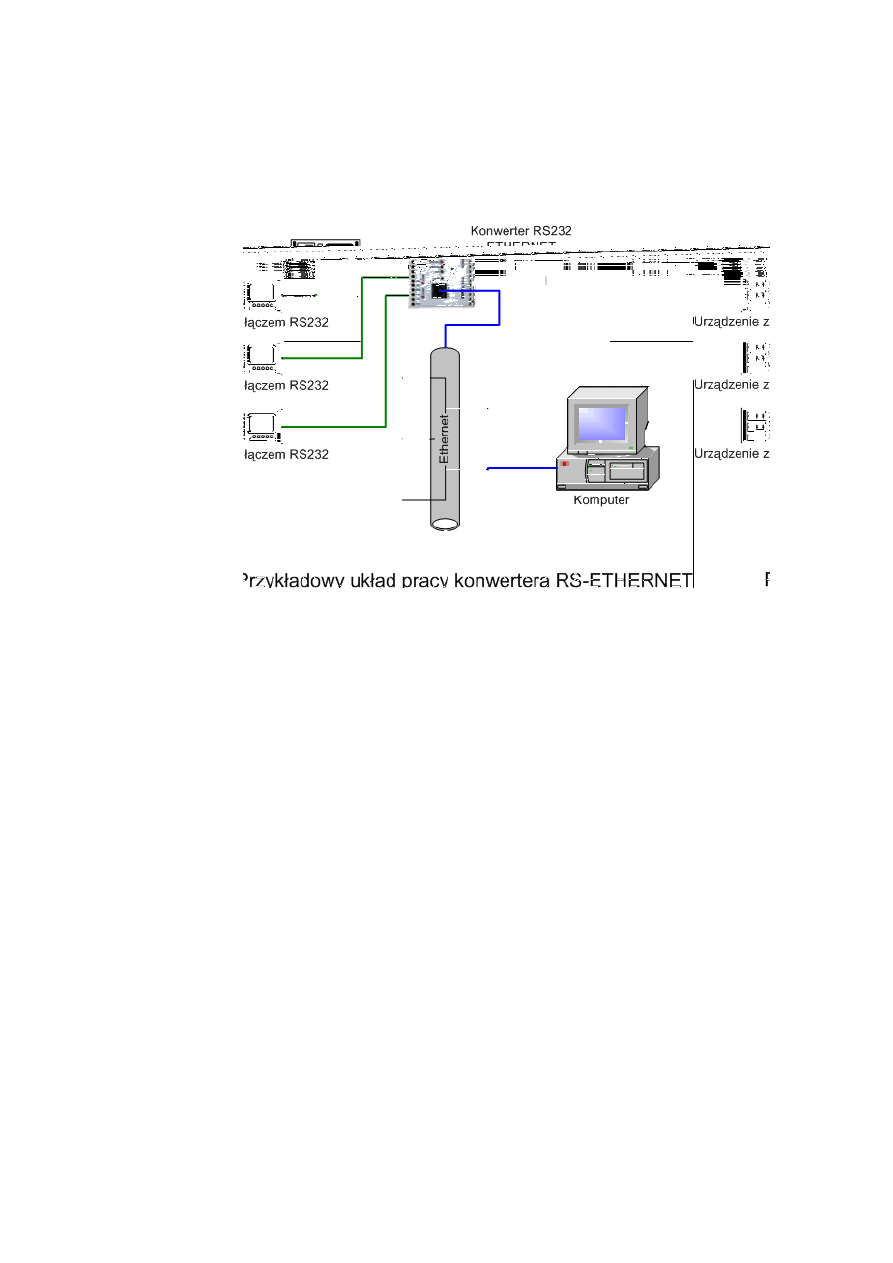
budynku czy kompleksu budynków. Przykład zastosowania konwertera RS-232 /
ETHERNET przedstawiono na rysunku 1.6. Konwerter pozwala na jednoczesne
otwarcie do czterech kanałów komunikacyjnych typu RS232 lub RS485.
Ponieważ konwerter pracuje w oparciu o protokół TCP/IP musi mieć przypisany
unikalny adres sieciowy w postaci xxx.xxx.xxx.xxx (np.: 10.0.0.1). Dostęp do
12
poszczególnych portów szeregowych uzyskuje się poprzez dodanie do adresu
sieciowego odpowiedniego numeru portu TCP. Kompletny adres wygląda
następująco xxx.xxx.xxx.xxx:nn gdzie nn to numer portu TCP (np.: 10.0.0.1:51).
Rys. 1.6. Przykład zastosowania konwertera RS232/Ethernet
(na podstawie materiałów firmy ESP)
Przedstawiony konwerter posiada zestaw diód LED informujący między
innymi: stan połączenia z siecią ethernet, transmisję danych, numer aktywnego
portu szeregowego oraz napięcie zasilania. Przed rozpoczęciem pracy konwerter
RS-ETH powinien zostać skonfigurowany. Parametry konwertera takie jak adres
IP, prędkości kanałów szeregowych konfiguruje się za pomocą łącza
serwisowego i dowolnego terminala znakowego (np. HyperTeminal, Telix lub
Norton Commander Terminal). W celu sprawdzenia komunikacji urządzenia
podłączonego do konwertera można uruchomić usługę Telnet na komputerze PC
poprzez wpisanie w programie Telnet adresu IP konwertera wraz z
przyporządkowanym dla danego numeru portu szeregowego numeru portu TCP.
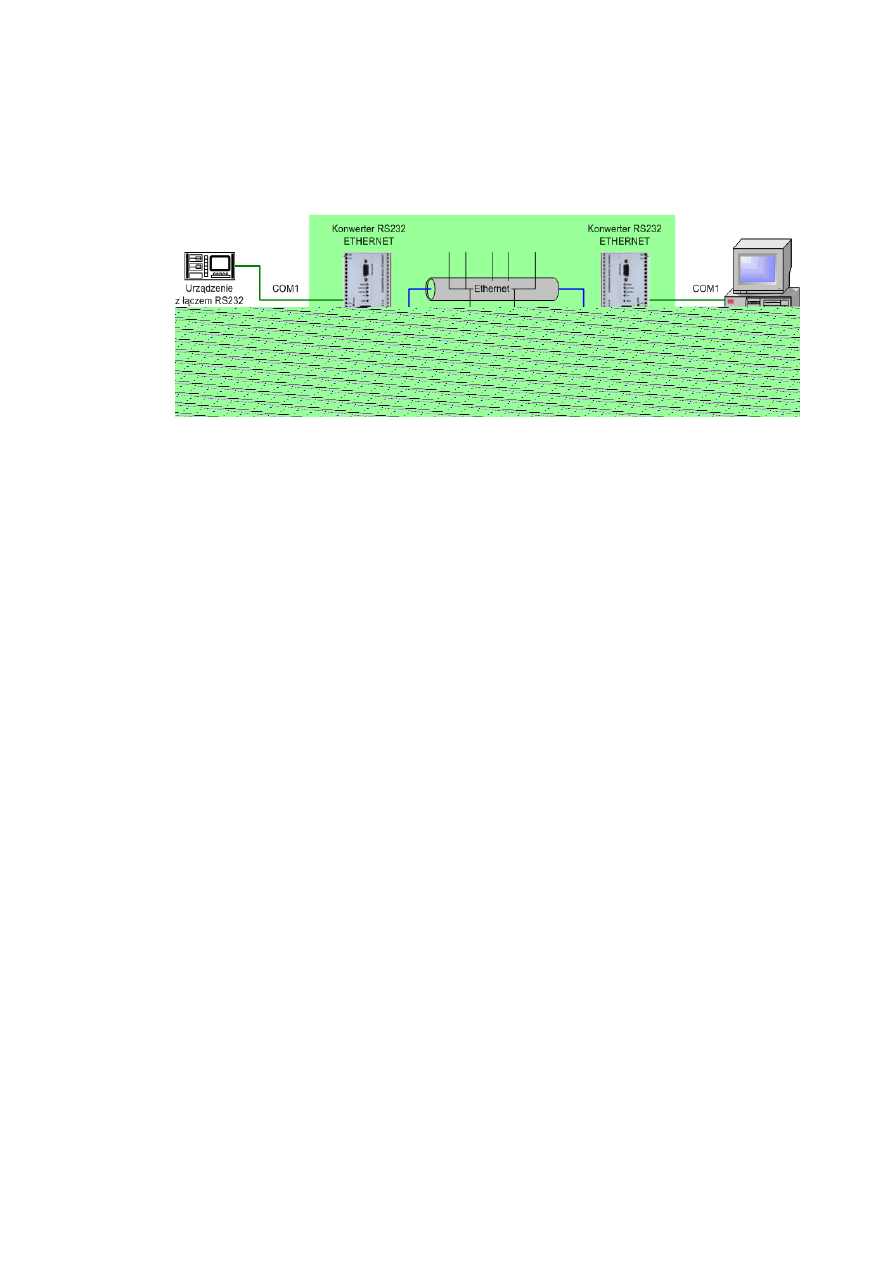
Zastosowanie dwóch konwerterów RS-232/Ethernet umożliwia prace w trybie
13
wirtualnego kanału RS-232. Tryb kanału wirtualnego dla łącza szeregowego
został przedstawiony na rysunku 1.7.
Rys.1.7. Tryb kanału wirtualnego dla łącza szeregowego z wykorzystaniem
dwóch konwerterów RS232/Ethernet
(na podstawie materiałów firmy ESP)
Zestawienie takiego połączenia umożliwia przesyłanie danych w obu
kierunkach przez sieć Ethernet/Internet. Sieć ethernet „traktowana” jest w tym
wypadku jak kabel RS232 .
Następnym przykładem urządzenia sterującego poprzez sieć internetową
jest miniserwer WebEmbed firmy NETICA [5]. Na rysunku 1.8. został
przedstawiony wygląd miniserwera WebEmbed. Jest on samodzielnym,
maksymalnie zminiaturyzowanym kompletnym serwerem sieci web (serwer
HTTP i FTP), dostosowanym do pracy w warunkach przemysłowych. Jest on
przeznaczony - jako gotowy "front-end" do sieci z protokołem TCP/IP - dla
zarówno już istniejących jak i nowo powstających systemów elektroniki,
automatyki i pomiarów, które takiego interfejsu nie posiadają. Szybka i łatwa
integracja WebEmbed z systemami użytkownika zwiększa ich globalny zasięg,
atrakcyjność i obszar zastosowań. Możliwości zastosowań WebEmbed są
niemalże nieograniczone. Faktycznym ograniczeniem może być wymagana moc
obliczeniowa procesora, pojemność krytycznych zasobów (np. pamięci systemu),
14
czy wymagany czas reakcji systemu na zdarzenia zewnętrzne (np. jeśli musiałby
on być krótszy niż 100 milisekund). Generalnie, potencjalne obszary zastosowań
WebEmbed mogą dla przykładu obejmować:
•
Przemysłowe systemy zdalnego sterowania i monitoringu,
•
Teleserwis, telemetria,
•
Systemy alarmowe,
•
Inteligentne budynki,
•
Systemy grzewcze i klimatyzacyjne, oczyszczalnie ścieków
•
Windy,
•
Telekomunikacja,
•
Parkingi,
•
Stacje pogodowe i monitoring środowiska,
•
Automaty biletowe, z napojami, z papierosami, bankomaty, itp.
•
Medycyna i laboratoria,
•
Kontrola dostępu,
•
Rejestracja danych,
•
E-banking,
•
Monitoring ruchu drogowego,
•
Automatyzacja gospodarstwa domowego i wiele, wiele innych.
Rys. 1.8. Widok miniserwera WebEmbed firmy NETICA
15
1.2. Systemy wykorzystujące sieć energetyczną do
sterowania i kontroli urządzeń
Sterowanie i kontrola urządzeń na dużych odległościach może odbywać
przy wykorzystaniu linii energetycznych. Systemy takie wykorzystują
technologię PLC (Power Line Comunication) jest to metoda transmisji danych w
oparciu o dostępną sieć elektryczną. W chwili obecnej zgodnie z regulacjami
istniejącymi w Unii Europejskiej istnieje kanał transmisji w sieci elektrycznej o
określonej częstotliwości dostępny dla odbiorcy bez specjalnych zezwoleń o
zakresie: 3...148.5kHz. Do połączenia urządzenia z siecią energetyczną
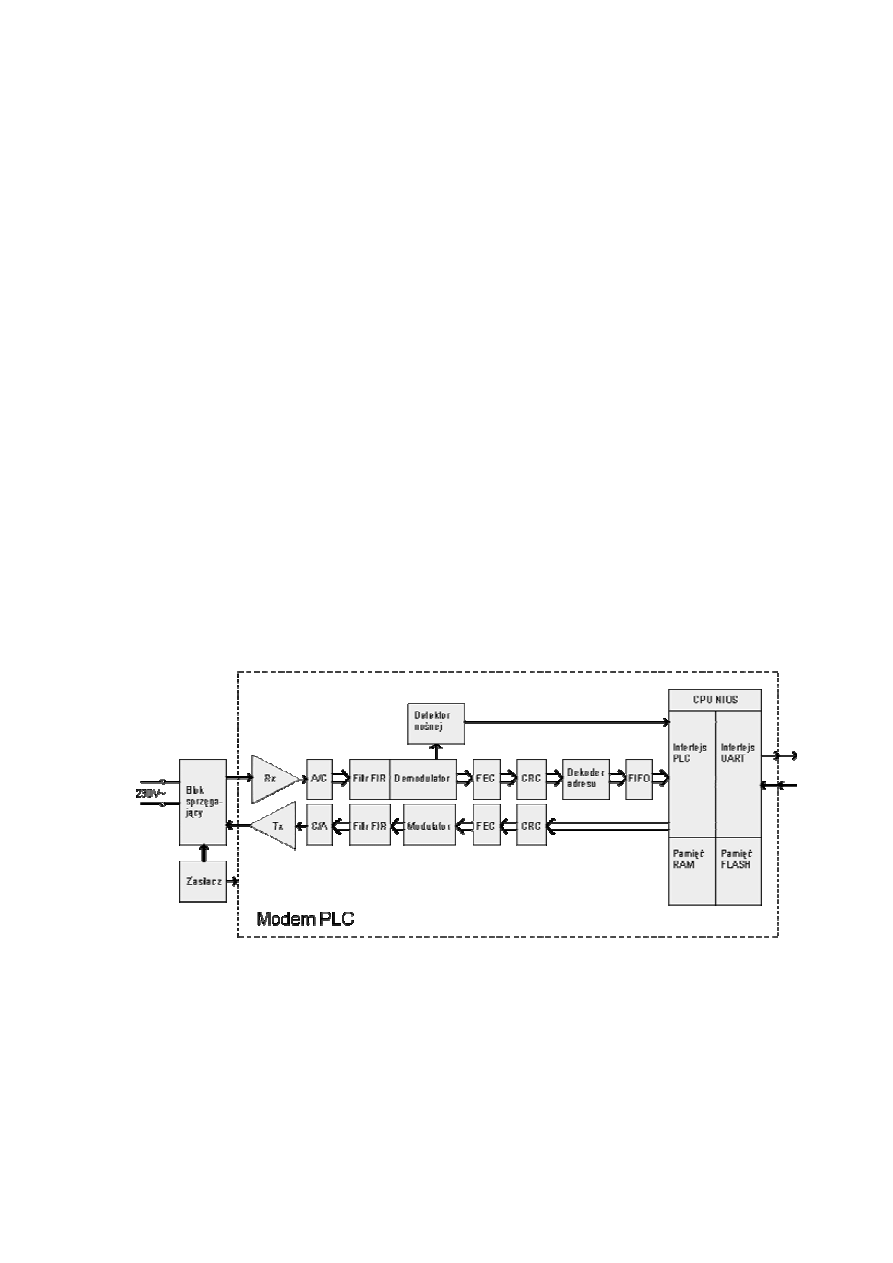
wykorzystywane są modemy PLC. Na rysunku 1.9. przedstawiony jest schemat
blokowy modemu PLC [6].
Rys. 1.9. Schemat blokowy modemu PLC
Podstawową zasadą działania komunikacji PLC jest modulacja i
demodulacja. Modulowany sygnał wysokiej częstotliwości jest dodawany do
przebiegu napięcia zasilania w linii zasilającej. Sygnał ten rozchodzi się po

16
przewodach zasilających. Moduł odbiorczy oddziela ten sygnał w paśmie
nadawczym z napięcia zasilającego. Wyizolowanie sygnału użytecznego z pasma
nadawczego odbywa się za pomocą filtrów wąskopasmowych o ostrych
zboczach oraz szybkiej transformacji Fouriera. Demodulacja sygnału pozwala na
odtworzenie oryginalnych danych. Jako, że sygnał przesyłany linią zasilającą
podlega różnym interferencjom niezbędne jest dokonanie weryfikacji
poprawności. Weryfikacja poprawności odebranych danych jest dokonywana za
pomocą sumy kontrolnej CRC. W innych słowach wartość sumy kontrolnej musi
się zgadzać z wartością sumy kontrolnej obliczonej podczas nadawania i
przesyłanej wraz z danymi. Aby zwiększyć bezpieczeństwo transmitowanych
danych, zastosowano dodatkowe procedury, jak automatyczne powtarzanie,
potwierdzanie odbioru danych lub 100% redundancja wysyłanych informacji, ich
przeplot podczas wysyłania i odbioru.
Jednym z systemów wykorzystujących technologie PLC są moduły
TransTherm oferowane przez firmę TEST-THERM Sp. z o.o [6] . Na rysunku
1.10. przedstawiony jest wygląd modułów TransTherm .
Rys.1.10. Moduły TransTherm firmy TEST-THERM wykorzystujące
technologię PLC do sterowania i kontroli urządzeń

17
Moduły TransTherm są kompleksowym systemem zorientowanym na
pomiary, sterowanie, i odczyt wielkości pomiarowych - temperatury,
wilgotności, ciepła itp. System może być sterowany i wszystkie jego funkcje
dostępne z jednego punktu centralnego, np. komputera podłączonego do
firmowej sieci komputerowej. Komunikacja pomiędzy indywidualnymi
modułami jest utrzymywana z wykorzystaniem technologii PLC. Technologia ta
zapewnia niezawodną komunikację poprzez sieć zasilającą na odległość do 3 km.
Oprogramowanie producenta modułów TransTherm umożliwia gromadzenia
danych pomiarowych, ich archiwizację i przetwarzanie. Ze względu na
modułowość można je łatwo przystosować do szczegółowych wymagań klienta.
System może pracować na pojedynczym komputerze albo na serwerze, skąd
może być dostępny dla całej sieci intranetowej.

18
2. Charakterystyka rozległej sieci
TCP/IP pod kątem możliwości
jej wykorzystania w systemach
sterowania i kontroli urządzeń
Sterowanie i kontrola urządzeń w sieciach internetowych wymaga
wymiany danych między jednostką sterującą/kontrolującą a urządzeniem
sterowanym lub kontrolowanym. Wymiana tych danych musi spełniać
zasady, reguły jakie panują w obszarach połączeń internetowych, gdyż w
przeciwnym razie, może dojść do nieprawidłowego zarządzania czy też
działania wspomnianych urządzeń.
W rozdziale drugim pracy został przedstawiony czterowarstwowy
model TCP/IP służący do wymiany danych między aplikacjami urządzeń
pracujących w sieci internetowej.
19
2.1. Warstwowy model sieci TCP/IP
W teorii sieci internetowej bardzo ważne miejsce zajmuje tzw.
warstwowy model sieci. Najczęściej opisuje się go korzystając z modelu OSI
(Open Systems Interconnection), który wyróżnia 7 warstw. Model OSI opisuje
sposób przepływu informacji między aplikacjami w jednej stacji sieciowej a
aplikacjami w innej stacji sieciowej przy użyciu medium transmisyjnego. W
modelu tym warstwy są to oddzielne części oprogramowania sieciowego
(realizującego funkcje komunikacyjne, organizującego sieć). Jedna warstwa
odpowiada za pewną część funkcji i "kompetencji". Dostarcza usług warstwie
wyższej i korzysta z usług warstwy niższej. Sposób komunikacji między stacjami
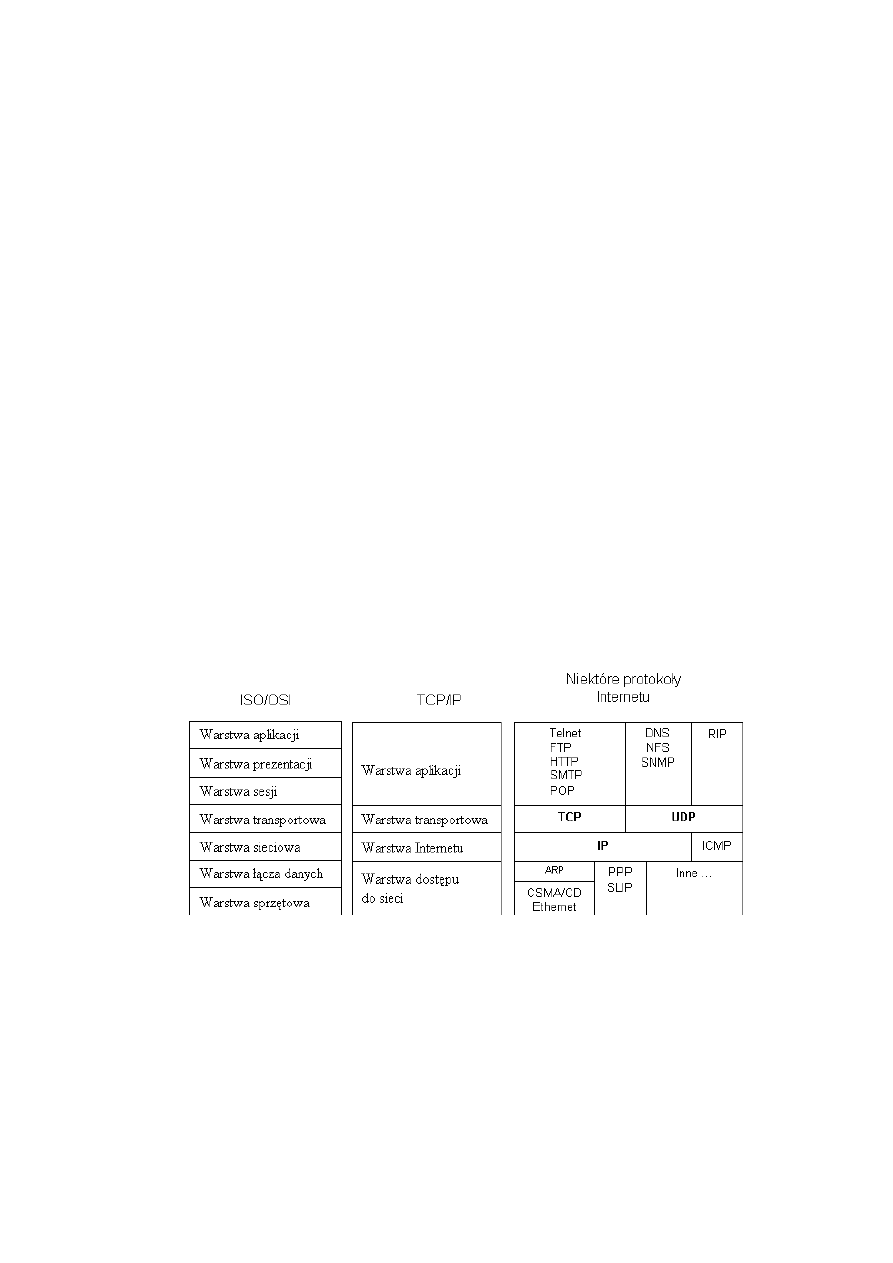
sieciowymi można również opisać czterowarstwowym modelem TCP/IP. Na
rysunku 2.1. przedstawione jest porównanie modelu ISO/OSI z modelem
TCP/IP.[7]
Rys. 2.1. Porównanie modelu ISO/OSI i modelu TCP/IP
Warstwa dostępu do sieci odpowiada za dostarczanie danych do innych
urządzeń bezpośrednio dołączonych do sieci. Współpracuje ona bezpośrednio ze
sprzętem i sterownikami odpowiedzialnymi za współpracę z siecią. W sieci

20
lokalnej mogą to być Ethernet lub Token-Ring (różne rozwiązania sieci
lokalnych). W przypadku innych sieci mogą to być protokoły PPP, SLIP lub
inne. Warstwa ta współpracuje więc z interfejsem sieciowym (kartą sieciową),
modemem lub innym urządzeniem pozwalającym na bezpośrednie połączenie
dwóch lub więcej stacji sieciowych i separuje resztę warstw od zastosowanych
rozwiązań fizycznych (niskopoziomowych). Świadczy ona usługę warstwie
wyższej polegającą na wysyłaniu i odbieraniu porcji danych (zwanych ramkami)
z stacjami w danej sieci fizycznej.
Warstwa internet (IP) odpowiada za dostarczanie danych do urządzeń
nie tylko w danej sieci fizycznej. Organizuje ona ruch tzw. pakietów IP między
poszczególnymi sieciami fizycznymi połączonymi w intersieć. Korzysta z usług
warstwy dostępu do sieci, sama zaś świadczy usługi dostarczania pakietu do
dowolnego komputera w Internecie.
Warstwa transportowa odpowiedzialna jest za niezawodną wymianę
danych z dowolnym komputerem w Internecie. Organizuje też i utrzymuje tzw.
sesje, czyli wirtualne połączenia między komputerami. Korzysta z warstwy IP,
sama zaś dostarcza usług niezawodnego transportu danych.
Warstwa aplikacji jest najwyżej położona. Tej warstwie odpowiadają
wszelkie programy (aplikacje) internetowe korzystające z warstwy
transportowej. Tu znajdują się wszelkie konkretne zastosowania Internetu -
przesyłanie plików (FTP), poczty (SMTP) i inne.
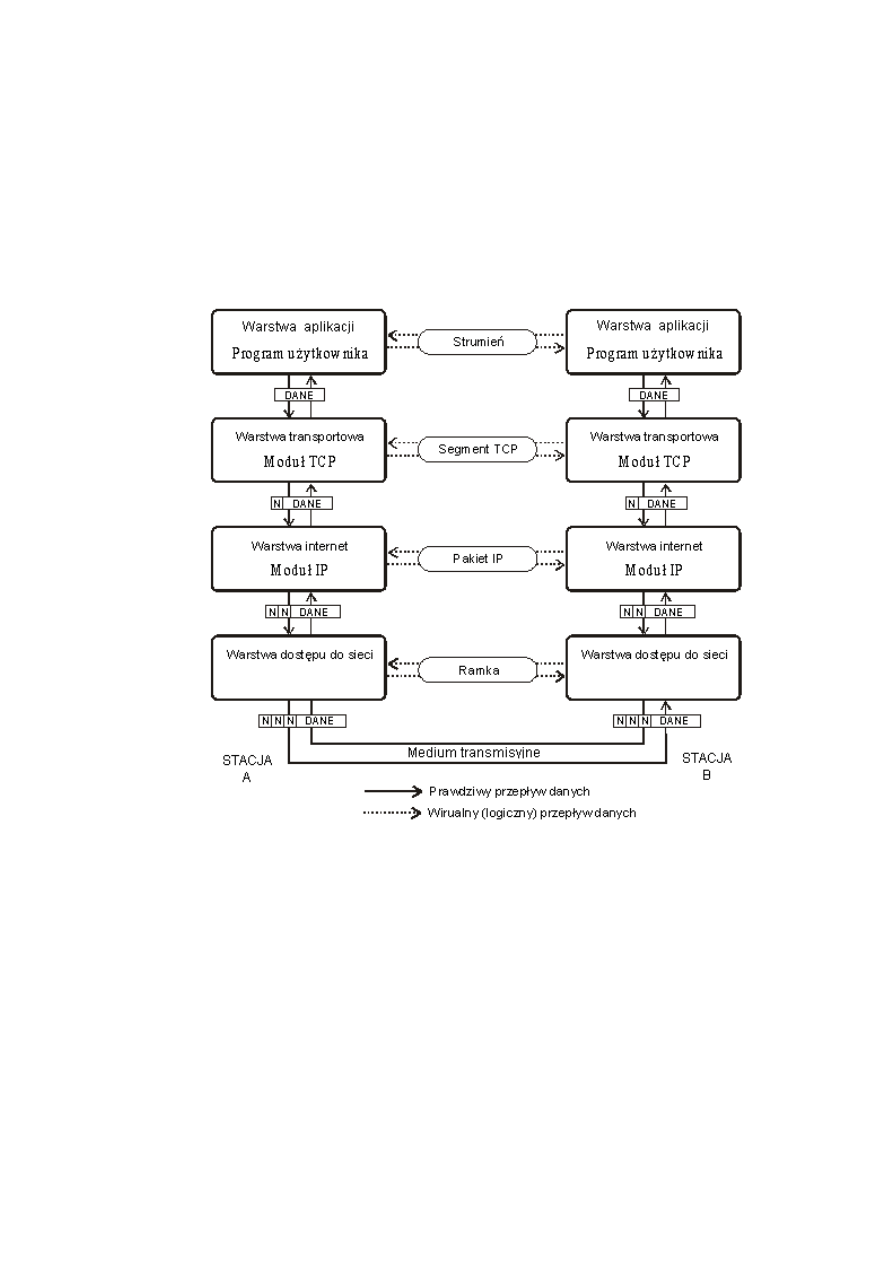
Współpraca między warstwami polega na świadczeniu usług przez
warstwy niższe warstwom wyższym (Rys.2.2.) Związane to jest także z
przepływem danych w dół sterty warstw (przy wysyłaniu danych) i w górę (przy
odbieraniu). Moduł warstwy aplikacji w stacji A (najczęściej program
użytkownika) wysyła dane do warstwy transportowej. Ta odpowiednio formatuje
je (dzieli lub łączy, dodaje nagłówek) i wysyła do warstwy IP. Ta z kolei dodaje
swój nagłówek i wysyła do warstwy dostępu do sieci. Warstwa również dołącza
swój nagłówek (związany ze sprzętowym rozwiązaniem komunikacji, np. tzw.
21
nagłówek MAC) i wysyła pakiet fizycznie do sieci. Podobna droga, ale w drugą
stronę, czeka dane w stacji je odbierającej (stacja B). Pakiet wędruje ku górze i
jest pozbawiany odpowiednich nagłówków, by wreszcie dotrzeć do warstwy
aplikacji w formie identycznej porcji danych jaką wysłała warstwa aplikacji w
stacji wysyłającej.
Rys. 2.2
Współpraca międzywarstwowa w modelu TCP/IP
W koncepcji warstw istnieje jeszcze coś takiego jak wirtualny (logiczny)
obieg danych. Występuje on pomiędzy odpowiadającymi sobie warstwami w
odległych systemach. Warstwy dostępu do sieci wymieniają między sobą ramki -
tu jeszcze wspomniana wirtualność jest mało widoczna. Warstwy IP wysyłają do
siebie pakiety IP - choć w rzeczywistości muszą się ze sobą komunikować
poprzez swoje niższe warstwy, to z logicznego punktu widzenia istnieje między
22
nimi wirtualne połączenie, które pozwala na wymianę pakietów. Podobnie jest z
warstwami transportowymi, które wysyłają między sobą poprzez swój wirtualny
kanał pakiety danych (segmenty TCP) i inne komunikaty zapewniające
utrzymanie sesji i niezawodne dostarczenia danych (potwierdzanie).
2.2 Protokół TCP
Protokół TCP (Transmission Control Protocol) jest to protokół
zorientowany połączeniowo, czyli umożliwia zestawienie połączenia w którym
efektywnie i niezawodnie przesyłane są dane. Połączenie to charakteryzuje się
możliwością sterowania przepływem, potwierdzania odbioru, zachowania
kolejności danych, kontroli błędów i przeprowadzania retransmisji. Blok danych
wymieniany między współpracującymi komputerami nosi nazwę segmentu
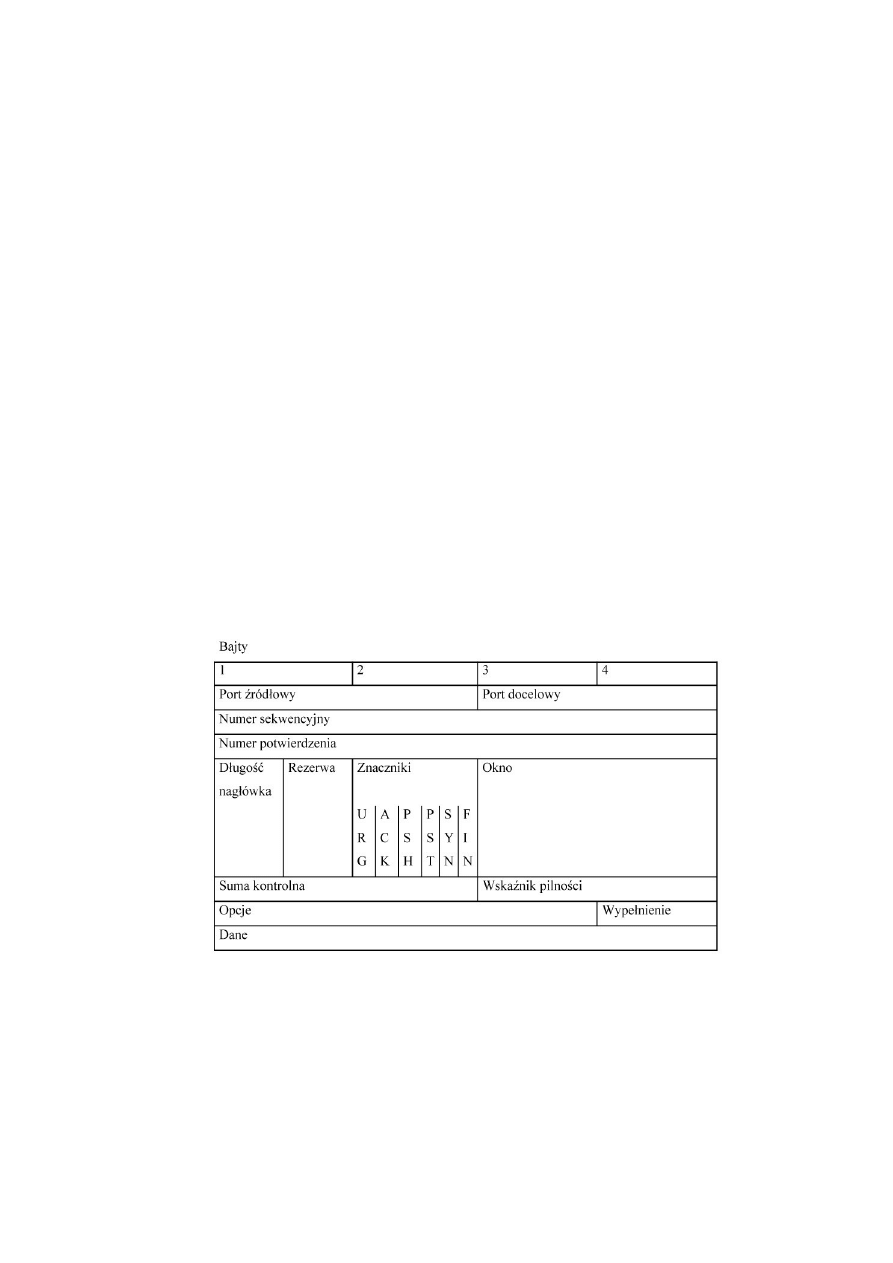
(nagłówek + dane) . Na rysunku 2.3. przedstawiony jest format segmentu TCP .
Rys. 2.3. Format segmentu TCP

23
Pole port źródłowy (16 bitów) i pole port docelowy (16 bitów)
zawierają numery portów procesów aplikacyjnych korzystających z usług TCP.
Kombinacja tych numerów z adresami sieciowymi określa parę gniazd
tworzących połączenie protokołu TCP. Pole numer sekwencyjny (32 bity)
zawiera numer sekwencyjny pierwszego bajtu danych w segmencie. Ta wartość
określa pozycję segmentu w strumieniu bajtów. Podczas ustanawiania
połączenia, i jeśli bit syn w polu znaczniki jest ustawiony na 1, to w tym polu
zawarty jest inicjujący numer sekwencyjny isn, od którego rozpoczyna się
numerację bajtów w połączeniu. Zatem pierwszy wysłany bajt ma numer isn + 1.
Pole numer potwierdzenia (32 bity) zawiera numer sekwencyjny następnego
oczekiwanego bajtu po stronie odbiorczej. Jednocześnie jest to potwierdzenie
poprawnego odbioru bajtów o numerach sekwencyjnych mniejszych od
zawartego w tym polu. Potwierdzenia mówią nadawcy ile bajtów danych zostało
już poprawnie odebranych. Pole długość nagłówka (4 bity) określa liczbę 32 -
bitowych słów w nagłówku segmentu TCP. Tym samym określone zostaje
miejsce, w którym rozpoczynają się dane. Pole to ma tak określone znaczenie
tylko wtedy, gdy bit ack równy jest 1. Pole rezerwa (6 bitów) jest przeznaczone
dla przyszłych zastosowań. Zawiera same zera. Pole znaczniki składa się z
sześciu bitów sterujących, które ustawione na 1 mają następujące znaczenie :
a) UGR wskazuje na ważność pola wskaźnik pilności,
b) ACK wskazuje na ważność pola numer potwierdzania,
c) PSH wskazuje na działanie funkcji wymuszającej wysyłanie
segmentu,
d) RST wyzerowanie połączenia,
e) SYN wskazuje, że w polu numer sekwencyjny umieszczony jest inicjujący
numer sekwencyjny INS. Jest on przeznaczony do synchronizacji numerów
sekwencyjnych w fazie ustanowienia połączenia.
f) FIN wskazuje, że nadawca nie ma nic więcej do nadania - sygnał końca
danych.

24
Pole okno (16 bitów) określa liczbę bajtów jaką może jeszcze
zaakceptować odbiorczy moduł TCP. Pole suma kontrolna jest 16 - bitowym
jedynkowym uzupełnieniem jedynkowo uzupełnionej sumy wszystkich 16 -
bitowych słów w segmencie. Ta suma obejmuje zarówno nagłówek jak i dane
segmentu. Pole wskaźnik pilności (16 bitów) jest interpretowane tylko wtedy,
gdy bit UGR jest równy 1. Pole to zawiera numer sekwencyjny bajtu
następującego po pilnych danych. Pole opcje ma długość zmienną będącą
wielokrotnością 8 bitów. Zawiera ono numery opcji - każdy numer zapisany w
jednym bajcie. Dla protokołu TCP zdefiniowano trzy opcje.
0 - koniec listy opcji,
1 - brak działania,
2 - maksymalna długość segmentu.
Pole wypełnienie uzupełnia nagłówek do wielokrotności 32 bitów.
Ponieważ
TCP jest protokołem zorientowanym połączeniowo, więc w celu przesłania
danych między dwoma modułami TCP, zainstalowanymi w różnych stacjach
sieciowych , konieczne jest ustanowienie, utrzymanie i rozłączenie połączenia
wirtualnego. Ustanowienie połączenia odbywa się w następujących etapach :
-nadawczy moduł TCP wysyła do odbiorczego modułu TCP segment z
bitem SYN=1 i z proponowanym numerem ISN w polu numer sekwencyjny,
-odbiorczy moduł TCP, jeśli zgadza się na ustanowienie połączenia, to
przesyła zwrotnie segment z bitami SYN=1 i ACK=1, a w polu numer
sekwencyjny podaje numer INS, z którym rozpocznie działanie,
-nadawczy moduł TCP wysyła segment z potwierdzeniem otrzymania
zgody (ACK=1) na ustanowienie połączenia i równocześnie zawierający dane.
W ten sposób zostaje ustanowione połączenie wirtualne między dwoma
modułami TCP i mogą zostać przesyłane segmenty z danymi. Segmenty te mogą

25
być przesyłane tym połączeniem w obu kierunkach, ponieważ TCP umożliwia
transfer danych między dwoma modułami w trybie dupleksowym.
Dla zapewnienia niezawodnej transmisji TCP wykorzystuje sekwencyjną
numerację bajtów oraz mechanizm pozytywnych potwierdzeń z retransmisją.
Numer sekwencyjny przypisany do każdego przesyłanego bajtu danych pozwala
na jego jednoznaczną identyfikację, a także jest używany w mechanizmie
przesyłania potwierdzeń. Ponieważ kolejne bajty są numerowane począwszy od
ISN, a zatem numer pierwszego bajtu wysłanego w połączeniu wirtualnym
wynosi ISN+1 ( zazwyczaj ISN=0).
Nadawczy moduł TCP dokonuje retransmisji danych do czasu, aż
otrzyma potwierdzenie poprawnego ich przyjęcia przez odbiorczy moduł TCP.
Rozpoczęcie retransmisji uwarunkowane jest przekroczeniem wcześniej
ustalonego czasu oczekiwania na nadejście potwierdzenia. Po stronie odbiorczej
poprawność odbioru danych sprawdzana jest przy użyciu pola suma kontrolna
znajdującego się w nagłówku segmentu. Jeżeli dane są akceptowane to moduł
TCP wysyła zwrotnie pozytywne potwierdzenie. Jest ono zawarte w polu numer
potwierdzenia. Wszystkie bajty danych o numerach sekwencyjnych mniejszych
od wartości zawarte w tym polu zostały odebrane poprawnie. W sytuacji, gdy
dane zostały odebrane poprawnie, a nadawczy moduł TCP retransmitował je np.
z powodu zaginięcia segmentu z pozytywnym potwierdzeniem, odbiorczy moduł
TCP ma możliwość odrzucenia nadmiarowych danych (duplikatów).
2.3 Protokół UDP
Protokół UDP (User Datagram Protocol) jest protokołem
bezpołączeniowym, nie posiadającym mechanizmów sprawdzających
poprawność dostarczenia danych. Protokół UDP został opracowany w celu
stworzenia aplikacjom możliwości bezpośredniego korzystania z usług IP.
26
Pozwala on aplikacjom na dołączanie do datagramów IP adresów portów
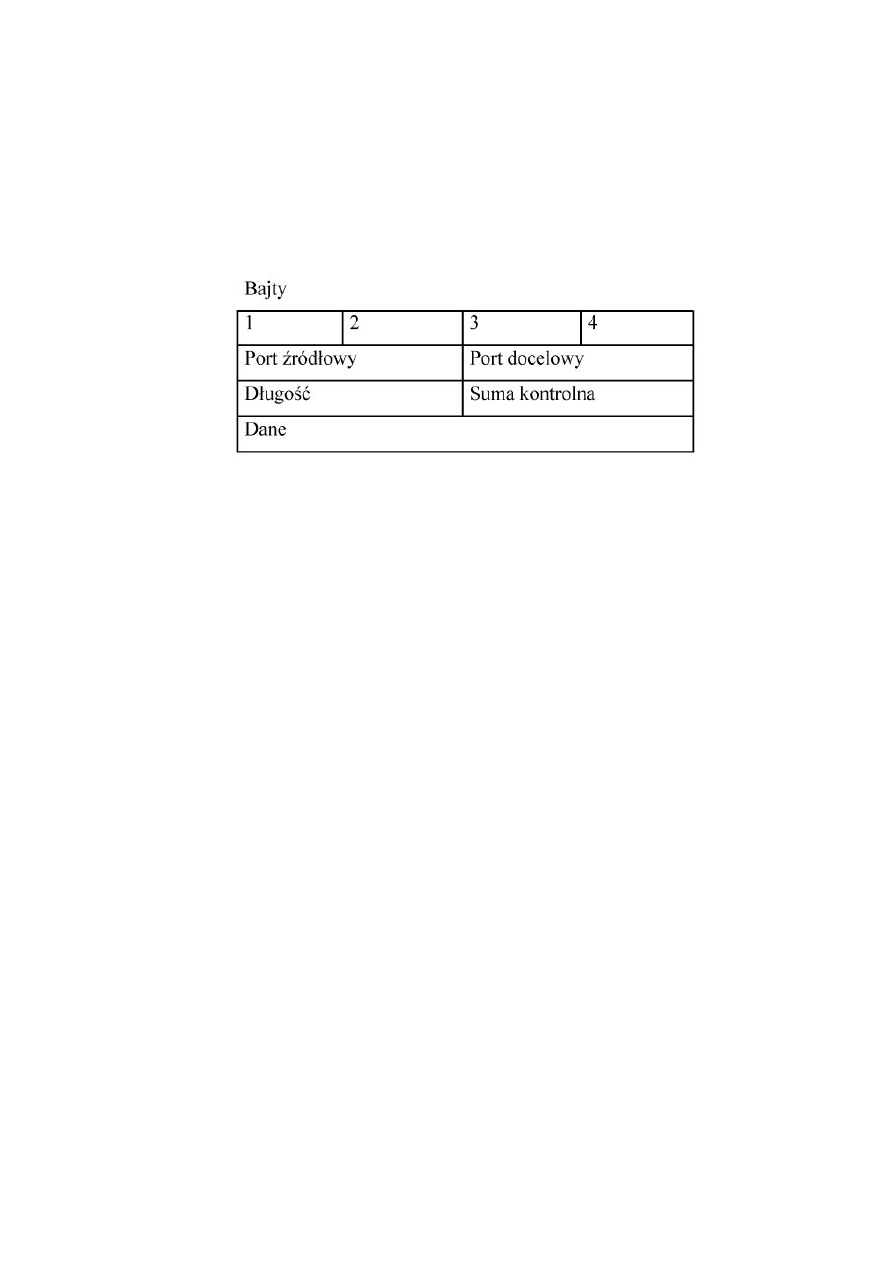
komunikujących się aplikacji. Strukturę pakietu protokołu UDP
przedstawiono na rysunku 2.4.
Rys. 2.4. Struktura pakietu protokołu UDP
Pole port źródłowy (16 bitów) określa numer portu nadawczego procesu
aplikacji. Jeśli pole to nie jest wykorzystane, to zawiera same zera. Pole port
docelowy (16 bitów) zawiera numer procesu aplikacji na komputerze
docelowym. Pole długość (16 bitów) zawiera całkowitą długość pakietu
(nagłówek i dane) w bajtach. Pole suma kontrolna jest szesnastobitowym
jedynkowym uzupełnieniem jedynkowo uzupełnionej sumy słów nagłówka i
danych pakietu. Protokół UDP jest wykorzystywany w sytuacjach, gdy
przesyłamy niewielką liczbę danych. Również protokół ten mogą używać
aplikacje działające według modelu zapytanie-odpowiedź. Ogólnie możemy
powiedzieć, że protokół UDP może być z powodzeniem używany tam gdzie nie
są wymagane usługi protokołu TCP.
2.4 Protokół IP
Protokół IP (Internet Protocol) jest przeznaczony do sieci z komutacją pakietów.
Pakiet jest nazywany przez IP datagramem. Każdy datagram jest podstawową,
samodzielną jednostką przesyłaną w sieci na poziomie warstwy Internet.
27
Datagramy mogą być adresowane do pojedynczych węzłów lub do wielu
węzłów. W przesyłaniu datagramów poprzez sieci uczestniczą routery (węzły
sieci), które określają dla każdego datagramu trasę od węzła źródłowego do
węzła docelowego. W różnych sieciach mogą być ustalone różne maksymalne
długości datagramów, więc w zależności od potrzeb, datagram może być
podzielony na kilka mniejszych części, tzn. na kilka datagramów. Tę operacją
nazywamy fragmentacją datagramów. Format każdego fragmentu jest taki sam
jak format każdego innego niepodzielnego datagramu. Konieczność fragmentacji
datagramu może być również następstwem przesyłania datagramów przez sieci
rozległe dopuszczające inne protokoły i inne długości pakietów, np. sieci X.25 z
pakietami o maksymalnej długości 128 bajtów. Kompletowanie pierwotnego
datagramu z fragmentów dokonuje się w komputerze docelowym. Z chwilą
nadejścia pierwszego fragmentu ustala się czas oczekiwania na skompletowanie
datagramu. Jeśli w tym okresie czasu nie nadejdą pozostałe fragmenty to
następuje przerwanie oczekiwania i skasowanie już otrzymanych fragmentów.
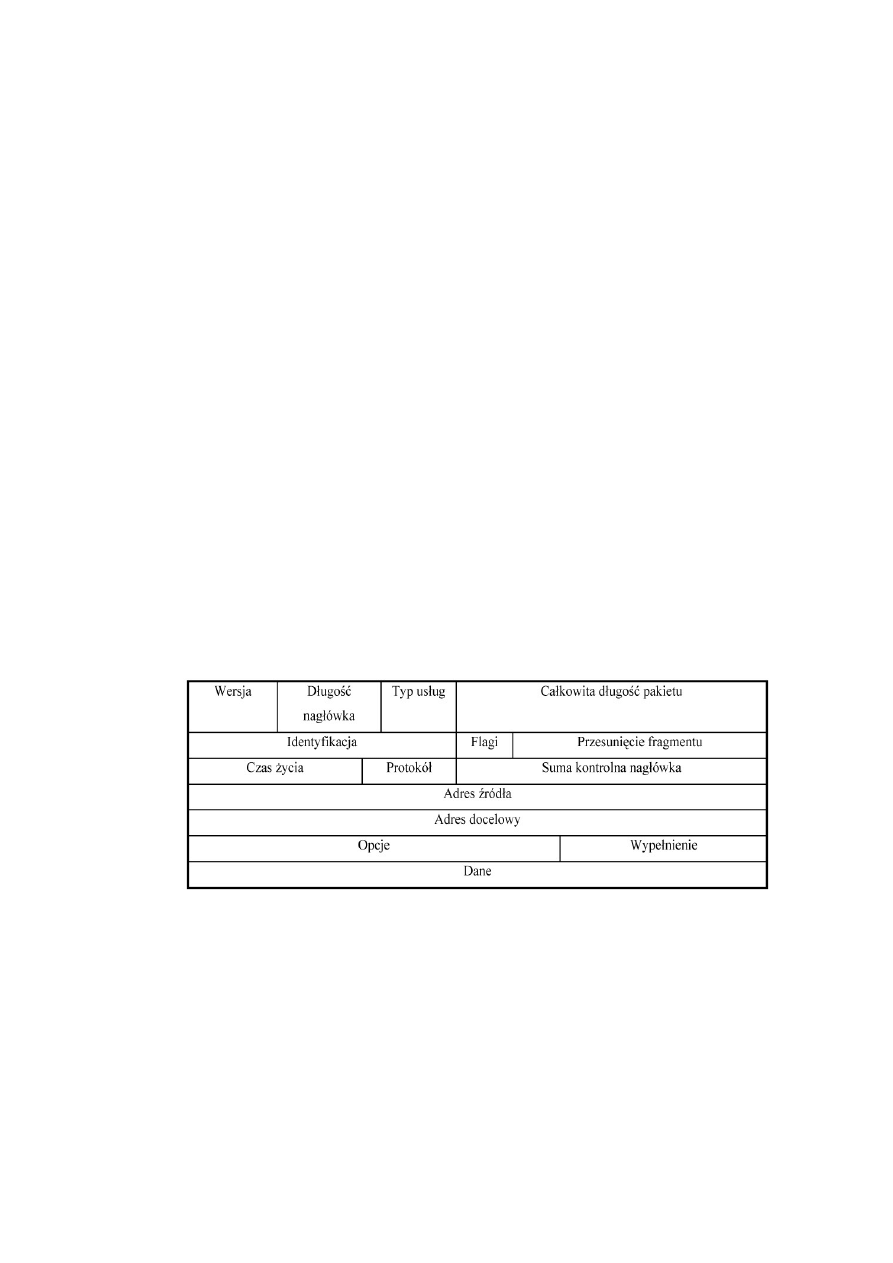
Na rysunku 2.5. została przedstawiona struktura datagramu IP.
Rys. 2.5. Struktura datagramu IP
Pole wersja (4 bity) określa numer użytej wersji protokołu IP. Jest ono
konieczne, ponieważ routery lub komputery w sieci mogą używać różnych wersji
IP. Pole długość nagłówka (4 bity) określa liczbę słów 32 bitowych

28
składających się na nagłówek datagramu. Typowa (minimalna) długość
nagłówka wynosi 5. Pole typ usług (8 bitów) określa jakość usług jakiej wymaga
się od sieci. Znaczenie poszczególnych bitów tego pola jest następujące:
1. Pierwsze trzy pola określają tzw. pierwszeństwo, np. 000 - oznacza datagram
zwykły, 001 - priorytetowy, 010 - natychmiastowy, 011 błyskawiczny, a 100 -
datagram super błyskawiczny.
2. Bit czwarty to bit D określający opóźnienie w sieci (D=0 oznacza normalne,
D=1 małe opóźnienie).
3. Kolejny bit to bit T związany z przepustowością (T=0 oznacza normalną, a
T=1 dużą przepustowość).
4. Bit szósty R pozwala wybrać niezawodność w dostarczeniu datagramu (R=0
normalna, R=1 duża niezawodność).
5. Ostatnie dwa bity mają wartości równe zeru i są zarezerwowane dla
przyszłych zastosowań.
Pole całkowita długość pakietu (16 bitów)definiuje długość datagramu
IP w bajtach (oktetach). Maksymalna długość datagramu wynosi 65535 bajtów.
Kolejne trzy pola w nagłówku są wykorzystywane przez protokół IP do
fragmentacji datagramów i do operacji odwrotnej, tzn. do składnia z krótkich
fragmentów pierwotnego datagramu. Te pole to identyfikacja, flaga i przesunięci
fragmentu. Pole identyfikacja (16 bitów) jest używane do jednoznacznego
oznaczenia każdego fragmentu pierwotnego datagramu. Identyfikator
zamieszczony w tym polu jest powtarzany we wszystkich fragmentach
składających się na pierwotny datagram. Pole flagi zawiera 3 bity. (pierwszy -
zawsze zero, drugi określa czy można (1) czy nie można (0) fragmentować
datagram, trzeci - identyfikacja ostatniego fragmentu składającego się na
pierwotny datagram (wartość 0 określa ostatni, 1 oznacza kolejny fragment).
Pole przesunięcie fragmentu (13 bitów) wskazuje, którą częścią całości
pierwotnego datagramu jest dany fragment.

29
Poszczególne fragmenty mają pola danych o długości będącej wielkością
8 bitów. Wyjątkiem jest ostatni fragment, którego długość wynika z długości
pierwotnego datagramu. W polu tym podaje się o ile zawartość fragmentu jest
przesunięta w stosunku do początku pola danych pierwotnego datagramu.
Pole
czas życia (8 bitów) jest parametrem określającym ile czasu datagram może
przebywać w sieci. Czas życia datagramu ustala nadawca umieszczając w tym
polu liczbę naturalną. Przy przejściu przez kolejny router liczba ta jest
zmniejszana o 1. Zmniejszenie do zera powoduje odrzucenie datagramu. Pole
protokół (8 bitów) określa numer protokołu warstwy transportowej, do którego
należy przesłać dane z datagramu; np. numer 6 oznacza protokół TCP, a numer 1
protokół ICMP. Pole suma kontrolna nagłówka (16 bitów) służy do
sprawdzania poprawności odbioru wyłącznie nagłówka datagramu. Jest to
szesnastobitowe jedynkowe uzupełnienie jedynkowo uzupełnionej sumy
wszystkich szesnastobitowych słów nagłówka i danych pakietu. Przy obliczaniu
sumy kontrolnej przyjmuje się, że pole to zawiera same zera. Suma ta podlega
weryfikacji i modyfikacji np. w trakcie zmian pola czas życia w każdym węźle
sieci. Pola adres źródła i adres docelowy (po 32 bity) zawierają adresy IP
odpowiednio komputera źródłowego i docelowego. Pole opcje, zmiennej
długości będącej wielokrotnością 8 bitów, jest wykorzystywane do określenia
dodatkowych wymagań dotyczących sposobu przesyłania datagramu, np. do
rejestrowania przebytej trasy lub do zapamiętania trasy zdefiniowanej w węźle
źródłowym. Pole to nie musi występować w nagłówku datagramu. Pole
wypełnienie jest ewentualnym dopełnieniem pola opcje do wielokrotności 32
bitów .
2.5. Protokół ICMP
Protokół IP jako protokół bezpołączeniowy nie posiada mechanizmów
informowania o błędach. Do tego celu przeznaczony jest protokół ICMP(Internet
30
Control Message Protocol). Umożliwia on przesyłanie między komputerami lub
routerami informacji o błędach występujących w funkcjonowaniu sieci IP np.:
a) brak możliwości dostarczenia datagramu do miejsca przeznaczenia,
b) zmiana wcześniej wyznaczonej trasy przez jeden z pośredniczących routerów,
c) brak wolnej pamięci buforowej dla zapamiętania datagramu.
Informacje o tych zaburzeniach w działaniu sieci noszą nazwę
komunikatów. Komunikaty protokołu ICMP są przesyłane wewnątrz
datagramów IP. Każdy komunikat ma własny format. Jednak wszystkie
rozpoczynają się takimi samymi polami: typ, kod oraz suma kontrolna. Dalsze
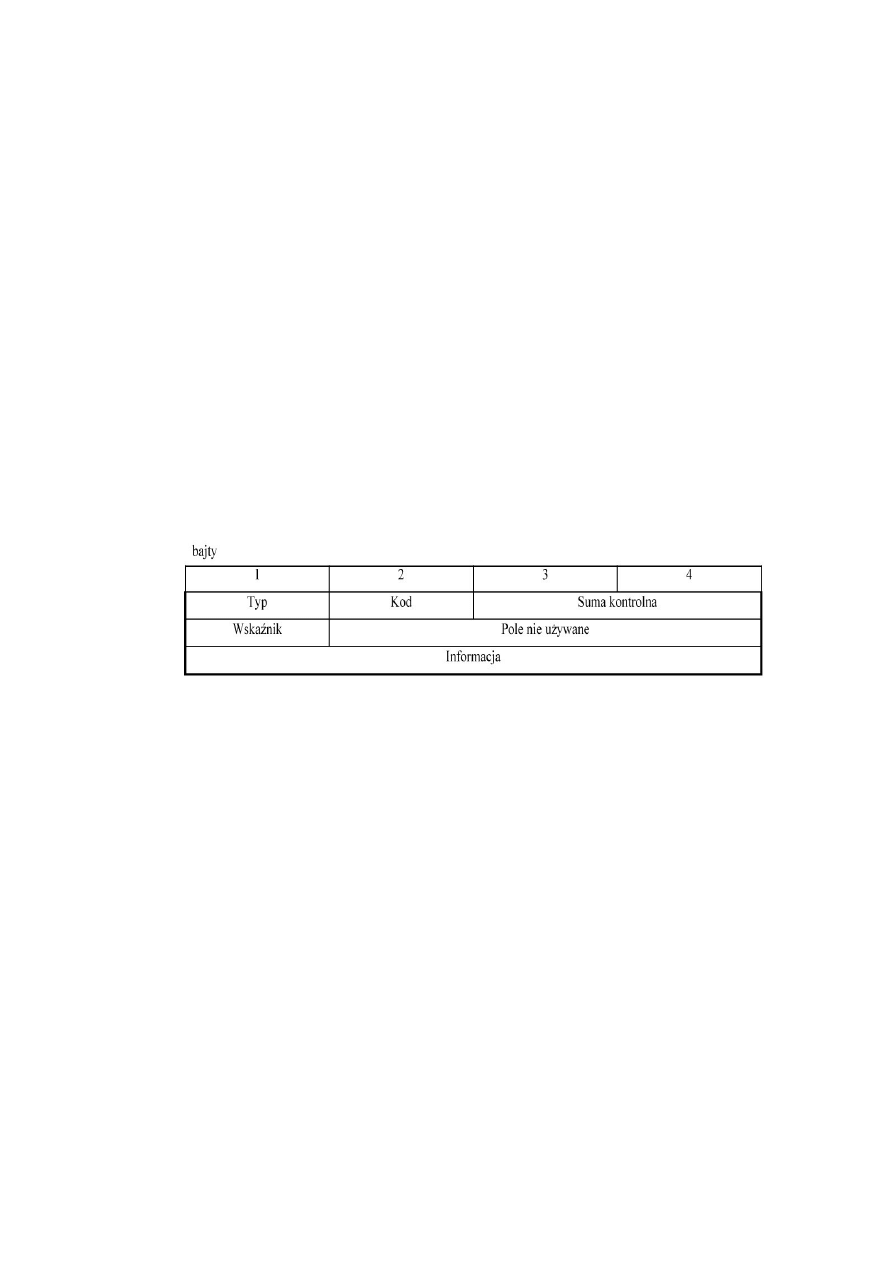
pola zależą od typu komunikatu ICMP. Przykład formatu komunikatu o
kłopotach z parametrami datagramu IP jest przedstawiony na rysunku 2.6.
Rys. 2.6. Format komunikatu o ICMP
Pole typ określa rodzaj komunikatu, a pole kod opisuje kod błędu. W
polu suma kontrolna zawarte jest szesnastobitowe jedynkowe uzupełnienie
jedynkowo uzupełnionej sumy szesnastobitowych słów komunikatu ICMP. Pole
wskaźnik określa bajt, w którym wystąpił błąd, natomiast pole informacja
zawiera nagłówek oraz pierwsze 64 bity datagramu IP, w którym wykryto błąd .
Protokół ICMP posługuje się 12 komunikatami, które są wymieniane między
routerami i / lub komputerami. Komunikaty te dotyczą przede wszystkim:

31
a) przekroczenie czasu życia datagramu. Komunikat jest wysyłany jeśli po
wykonaniu odpowiednich obliczeń, wartość pola czas życia datagramu IP
osiągnie zero,
b) wystąpienia niezrozumiałego parametru. Komunikat ten sygnalizuje
wystąpienie niedopuszczalnej wartości w pewnym polu nagłówka datagramu IP,
c) wykrycie nieosiągalnych miejsc przeznaczenia. Jeśli nieosiągalnym adresatem
jest komputer w sieci, to komunikat ten jest wysyłany przez routery
pośredniczące w transferze datagramów. Jeżeli nieosiągalnym miejscem
przeznaczenia jest port, to komunikaty wysyła docelowy komputer,
d) chwilowego wstrzymania nadawania, gdy datagramy przybywają do
komputera lub pośredniczącego routera szybciej niż można je przetworzyć i
brakuje wolnej pamięci buforowej do ich zapamiętania,
e) sprawdzenia zasobów sieciowych. W celu sprawdzenia poprawności działania
zdalnego systemu wysyła się sygnał echa. System, po otrzymaniu tego
komunikatu, musi natychmiast odesłać go do nadawcy. Brak odpowiedzi
oznacza, że testowany system nie jest sprawny,
f) wskazania innej (krótszej) trasy dla datagramów,
g) określenia opóźnienia związanego z przesyłaniem datagramów przez sieć,
h) identyfikacji sieci przez dołączony do niej komputer (konfiguracja
komputera),
i) otrzymania przez komputer maski podsieci wykorzystywanej w sieci fizycznej.

32
3. Propozycje sposobów przyłączania
nadzorowanych urządzeń do sieci
TCP/IP
W trzecim rozdziale pracy został przedstawiony sposób
podłączania urządzeń do sieci TCP/IP przy wykorzystaniu sterownika
mikroprocesorowego pracującego jako konwerter interfejsów między
danym urządzeniem a różnym typem sieci.
33
3.1. Sterownik jako konwerter między siecią TCP/IP
a urządzeniem
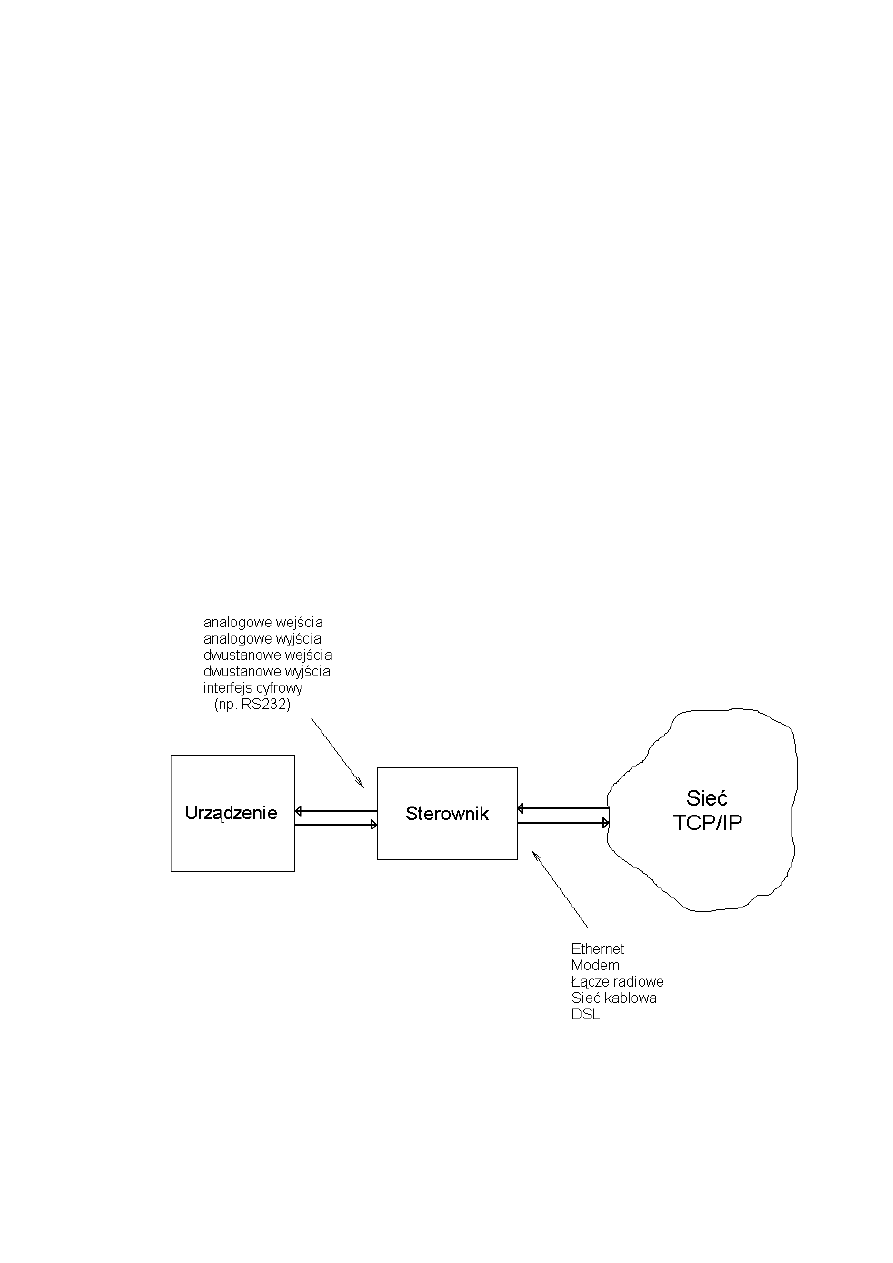
Nadzorowanie urządzeń poprzez sieć TCP/IP, które nie posiadają
interfejsu sieciowego umożliwiającego bezpośrednie podłączenie urządzenia do
danego typu sieci, wymaga podłączenia modułu (sterownika) między interfejsem
danego urządzenia a interfejsem sieciowym. Moduł ten powinien odpowiadać za
konwersję sygnałów wejścia/wyjścia danego urządzenia na sygnały panujące w
medium transmisyjnym w danym typie sieci internetowej i odwrotnie, czyli
konwertować sygnały sieciowe na sygnały odpowiadające obsłudze danego
urządzenia. Przykład urządzenia podłączonego do sieci TCP/IP poprzez
sterownik odpowiadający za konwersję interfejsów jest przedstawiony na
rysunku 3.1.
Rys.3.1. Sposób podłączania nadzorowanych urządzeń do sieci TCP/IP
34
4. Projekt sterownika mikropro-
cesorowego umożliwiającego
zadawanie i odczyt stanów
urządzeń poprzez sieć TCP/IP
W tym rozdziale przedstawiłem projekt sterownika
umożliwiającego zadawanie i odczyt stanów poprzez sieć TCP/IP.
Najpierw scharakteryzowałem wybrany do sterownika mikrokontroler a
następnie przedstawiłem schemat blokowy urządzenia i schematy ideowe
jego poszczególnych bloków. Na końcu tego rozdziału umieściłem wykaz
elementów użytych w zaprojektowanym sterowniku.

35
4.1. Wybór mikrokontrolera
Projekt sterownika mikroprocesorowego umożliwiającego zadawanie i
odczyt stanów urządzeń poprzez sieć TCP/IP wykonałem na bazie
mikrokontrolera DS80C400 firmy Maxim/Dallas[8]. Wybrałem ten
mikrokontroler ze względu, iż producent zaimplementował pełny stos
protokołów TCP/IP w pamięci ROM mikrokontrolera oraz udostępnia pełne
oprogramowanie do tego mikrokontrolera. Przy projektowaniu sterownika
pomocny przydał się kit oferowany przez firmę Maxim/Dallas o nazwie TINI400
[10], gdzie wykonany przeze mnie projekt oparty jest na tym zestawie.
Wbudowanie stosu TCP/IP przez producenta ułatwiło mi wykonanie sterownika
pracującego w sieci internetowej. Oprócz zaimplementowania stosu TCP/IP,
producent wyposażył mikrokontroler DS80C400 w wiele urządzeń
peryferyjnych. Posiada on trzy porty szeregowe, kontroler interfejsu CAN 2.0B,
interfejs jednoliniowy (1-Wire Master) i 64 linie we/wy. Zaimplementowany stos
TCP/IP pozwala na obsługę jednocześnie do 32 połączeń TCP i na transfer
danych do 5Mbps przez sieć Ethernet. Maksymalna częstotliwość oscylatora
zasilającego mikrokontroler wynosząca 75MHz pozwala na uzyskanie
minimalnego cyklu instrukcji równego 54ns. Dostęp do zewnętrznej pamięci
programu i danych jest realizowany przez 24-bitowe adresowanie, które
umożliwia zaadresowanie 16MB obszaru danych. W celu poprawy transferu
danych pomiędzy mikrokontrolerem a pamięcią wprowadzono cztery rejestry
indeksowe, które mogą być konfigurowane tak, aby inkrementowały lub
dekrementowały swoją zawartość w zależności od wykonywanej instrukcji.
Sprzętowy „math accelerator” znacznie przyspiesza wykonywanie 32- i 16-
bitowego mnożenia i dzielenia i innych operacji arytmetycznych.
Cechy układu :

36
• Wykonuje pojedynczy cykl instrukcji w 54 ns .
• Częstotliwość oscylatora od DC do 75MHz.
• Ciągła przestrzeń adresowa do 16MB.
• Cztery rejestry indeksowe z automatyczną inkrementacją/dekrementacją.
• Sprzętowy 16/32-bitowy Math Accelator.
• Kontroler 10/100Ethernet Media Accese Controller (MAC).
• Kontroler interfejsu 1-Wire Net.
• Trzy full-duplex porty szeregowe.
• Do ośmiu dwukierunkowych 8-bitowych portów (64 linie we/wy).
• Zapewnia możliwość bootowania (Network Boot Over Ethernet) za
pomocą protokołów DHCP i TFTP.
• Posiada zaimplementowany w ROM pełny, dostępny przez aplikację
użytkownika stos TCP/IP.
• Zaimplementowano protokóły IPv4 i IPv6.
• Zaimplementowano protokoły UDP, TCP, DHCP, ICMP, i IGMP.
• Adres MAC może być opcjonalnie pobrany z układu IEEE-Registered
DS2502-E48.
• Interfejs Ethernet obsługujący standardy IEEE 802.3 MII (10/100Mbps) i
ENDEC (10Mbps) z możliwością wybory PHY.
• 8kB pamięci w układzie dla pakietów danych wysyłanych i odbieranych
na TX/RX z jednostką kontroli bufora redukującą obciążenie jednostki
centralnej.
• Realizuje operacje half- lub full-duplex z kontrolą przepływu danych.
• Filtracja adresów Multicast/Broadcast z obsługą VLAN.
• W pełni funkcjonalny kontroler interfejsu CAN 2.0B(obsługa 11-
bitowych i 29-bitowych identyfikatorów).
• Obsługa 16 źródeł przerwań w tym 6 zewnętrznych.
• Układ posiada cztery 16-bitowe Timer/Couters.
• Układ redukcji zakłóceń elektromagnetycznych (EMI).
• Programowalny układ watchdog.
• Układ detekcji uszkodzenia oscylatora.
• Programowany generator wykorzystywany przez interfejs IrDA.
• Zaawansowany układ redukcji pobieranej mocy (praca rdzenia przy 1,8V,
operacje przy napięciu 3,3V, tryby idle i stop.
• Możliwość wyboru 8/10-bitowego wskaźnika stosu.
• Dodatkowa 1kB wewnętrzna pamięć SRAM wykorzystywana jako stos
dla danych.
• 16-bitowe/24-bitowe strony w trybie 24-bitowej obsługi pamięci.
• Możliwość wyboru pracy interfejsu do obsługi pamięci zewnętrznej :praca
multipleksowa lub niemultipleksowa.
•
Możliwość programowania mikrokontrolera w systemie (In-System
Programming).
37
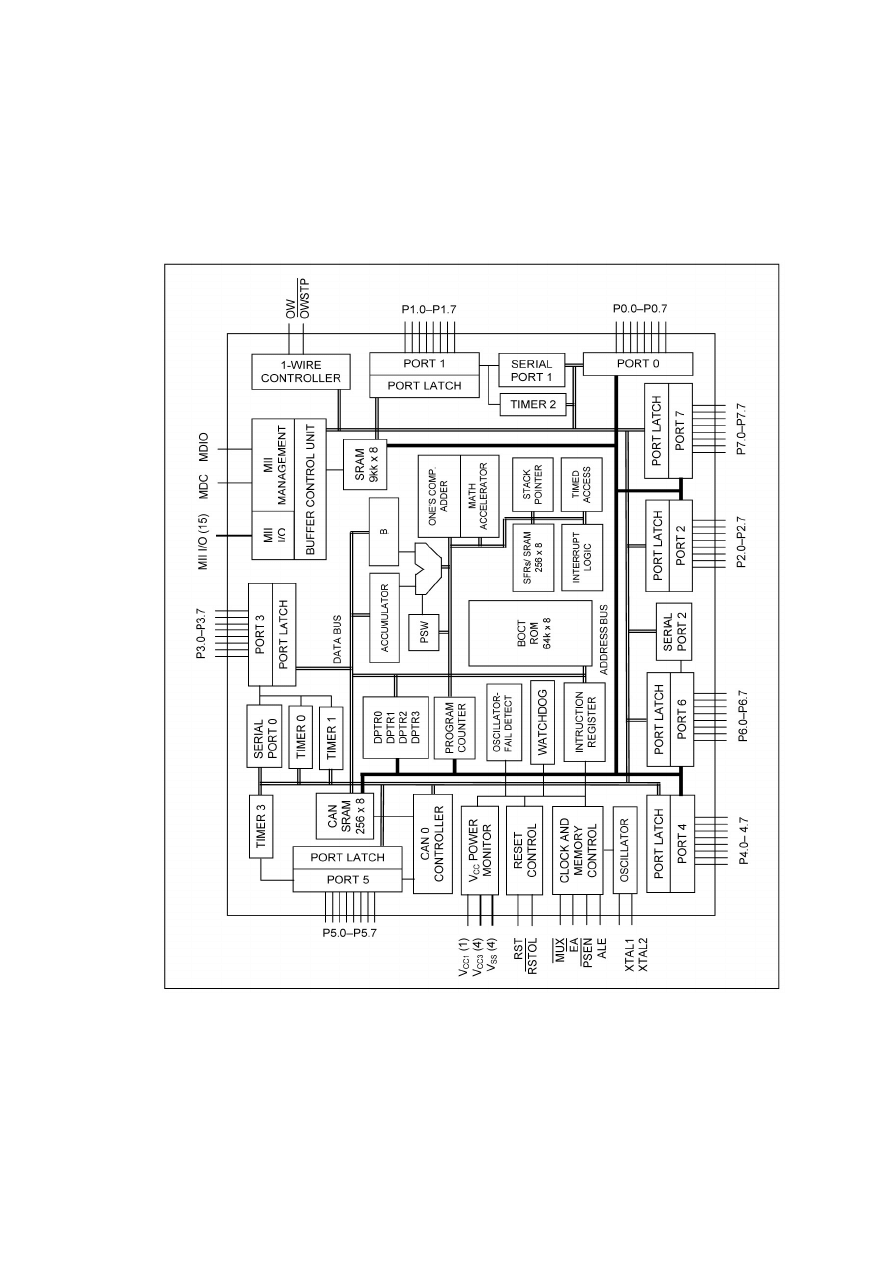
Schemat blokowy mikrokontrolera DS80C400 jest przedstawiony na rysunku
4.1.
Rys.4.1. Schemat blokowy mikrokontrolera DS80C400
38
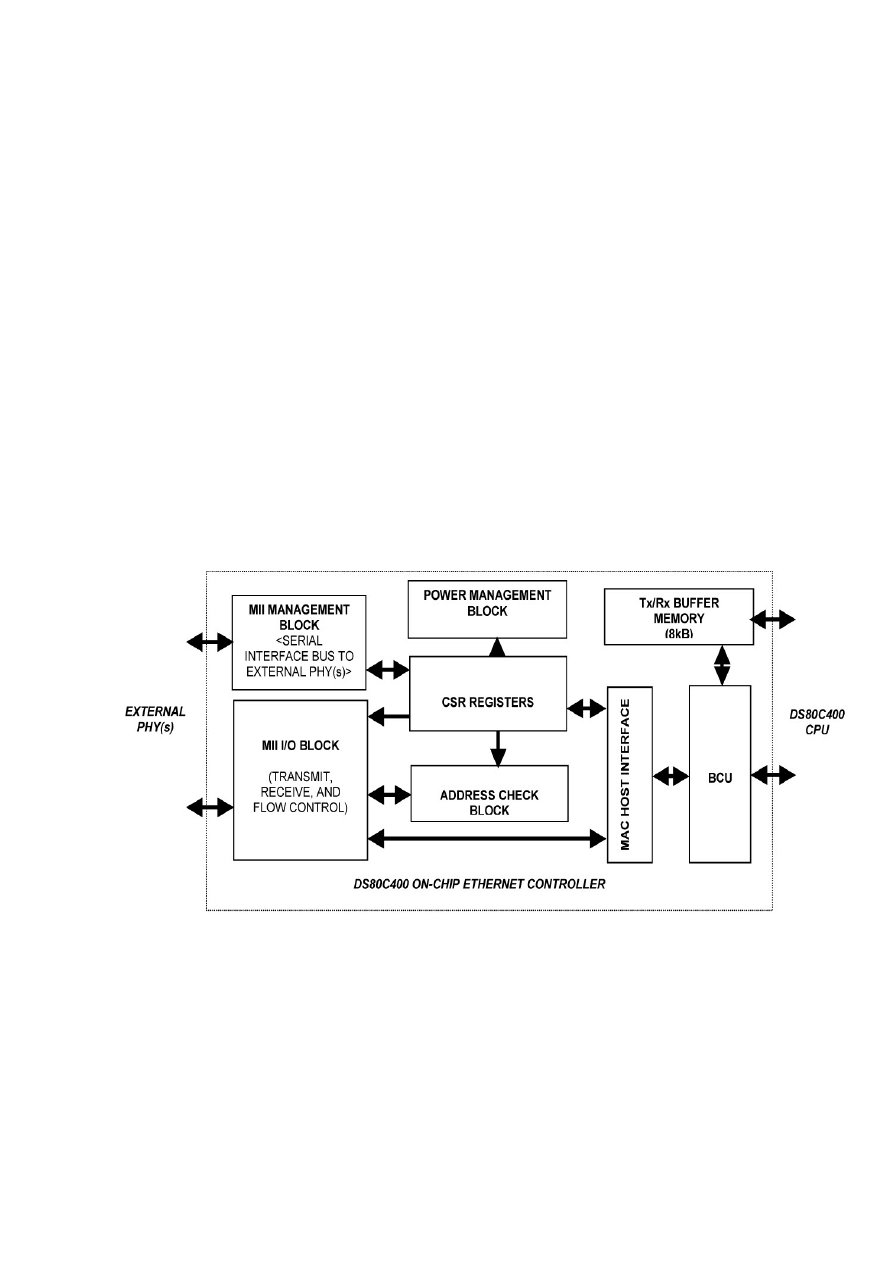
Kontrloler Ethernetu 10/100Mbps układu DS80C400 obsługuje
protokoły warstwy fizycznej wymagane przez standard Ethernet/IEEE 802.3.
Zapewnia on mechanizmy do odbioru, nadawania i kontroli przepływu danych
przez niezależny od nośnika interfejs (MII), który zawiera szeregowy interfejs
pozwalający na konfiguracje zewnętrznych urządzeń fizycznych (external PHY
devices). Interfejs MII może być konfigurowany do pracy w trybie half-duplex
lub full-duplex przy prędkości 10Mbps lub 100Mbps, lub może pracować w
trybie 10Mbps ENDEC. Dla trybu half-duplex układ DS80C400 współdzieli
fizyczny nośnik Ethernetu z innymi stacjami w sieci. DS80C400 przy dostępie
do sieci korzysta z metody CSMA/CD. Schemat blokowy interfejsu Ethernet
mikrokontrolera DS80C400 jest przedstawiłem na rysunku 4.2.
Rys.4.2. Schemat blokowy interfejsu Ethernet mikrokontrolera DS80C400
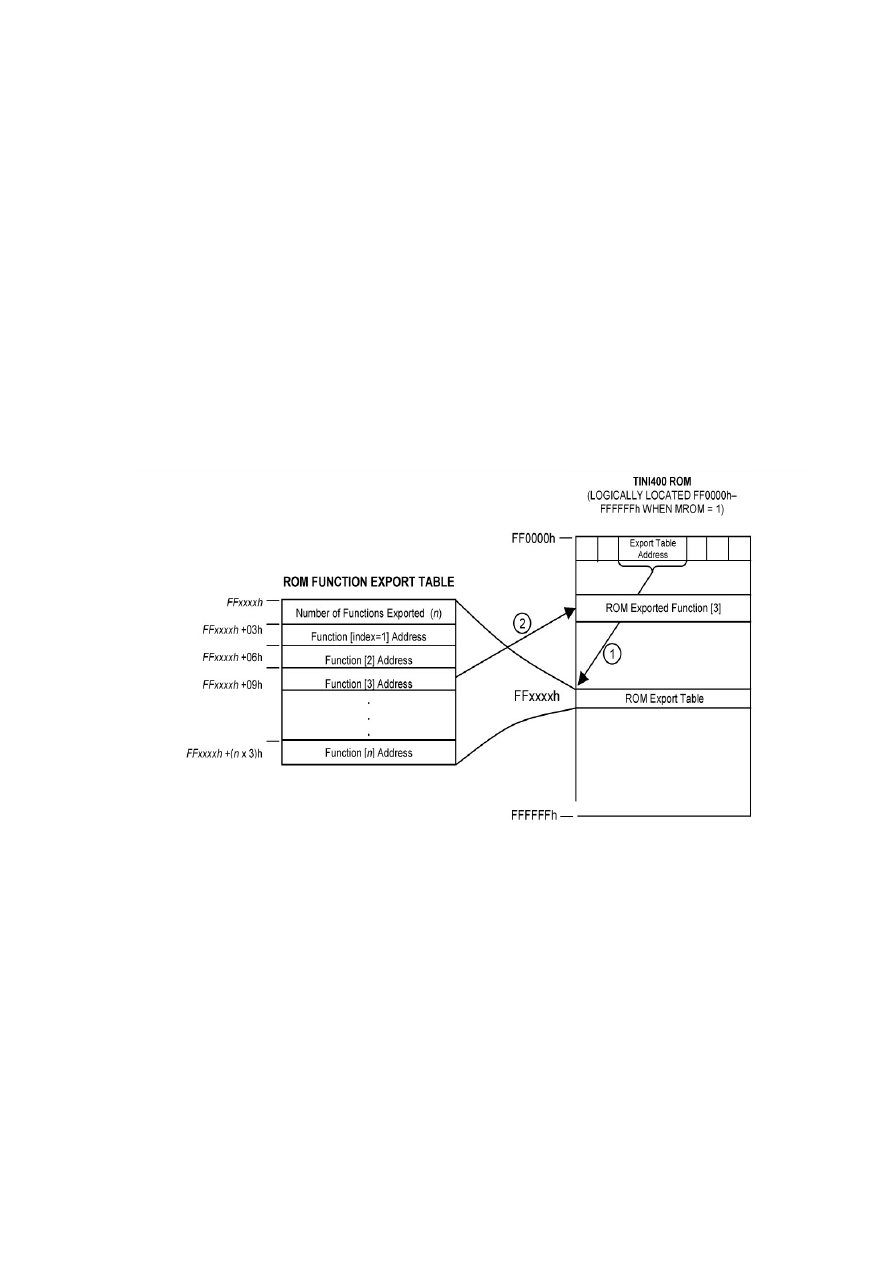
Mikrokontroler DS80C400 posiada 64kB wewnętrzną pamięć ROM
(TINI400 ROM), w której zaimplementowano wiele funkcji dostępnych dla
aplikacji napisanych przez użytkownika. Każda z tych funkcji znajduje się pod
39
określonym adresem w pamięci programu. Adres absolutny każdej funkcji z
TINI400 ROM musi być przeczytany z tabeli eksportu adresów (również
znajdującej się w pamięci ROM). Ze względu na elastyczność oprogramowania
tabela eksportu adresów nie znajduje się pod określonym adresem, lecz jej
początek jest wskazywany przez 3-bajtowy wskaźnik znajdujący się pod adresem
(trzema adresami): FF0002h (XSB), FF0003h (MSB), FF0004h (LSB). Trzy
pierwsze bajty tabeli zawierają liczbę funkcji w niej zawartych. Pozostałe bajty
tabeli (z krokiem co 3 bajty) zawierają absolutne adresy funkcji eksportowanych
z pamięci ROM. Sposób obliczania absolutnych adresów funkcji jest
przedstawiony na rysunku 4.3
.
Rys. 4.3. Sposób obliczania absolutnych adresów funkcji w mikrokontrolerze
DS80C400
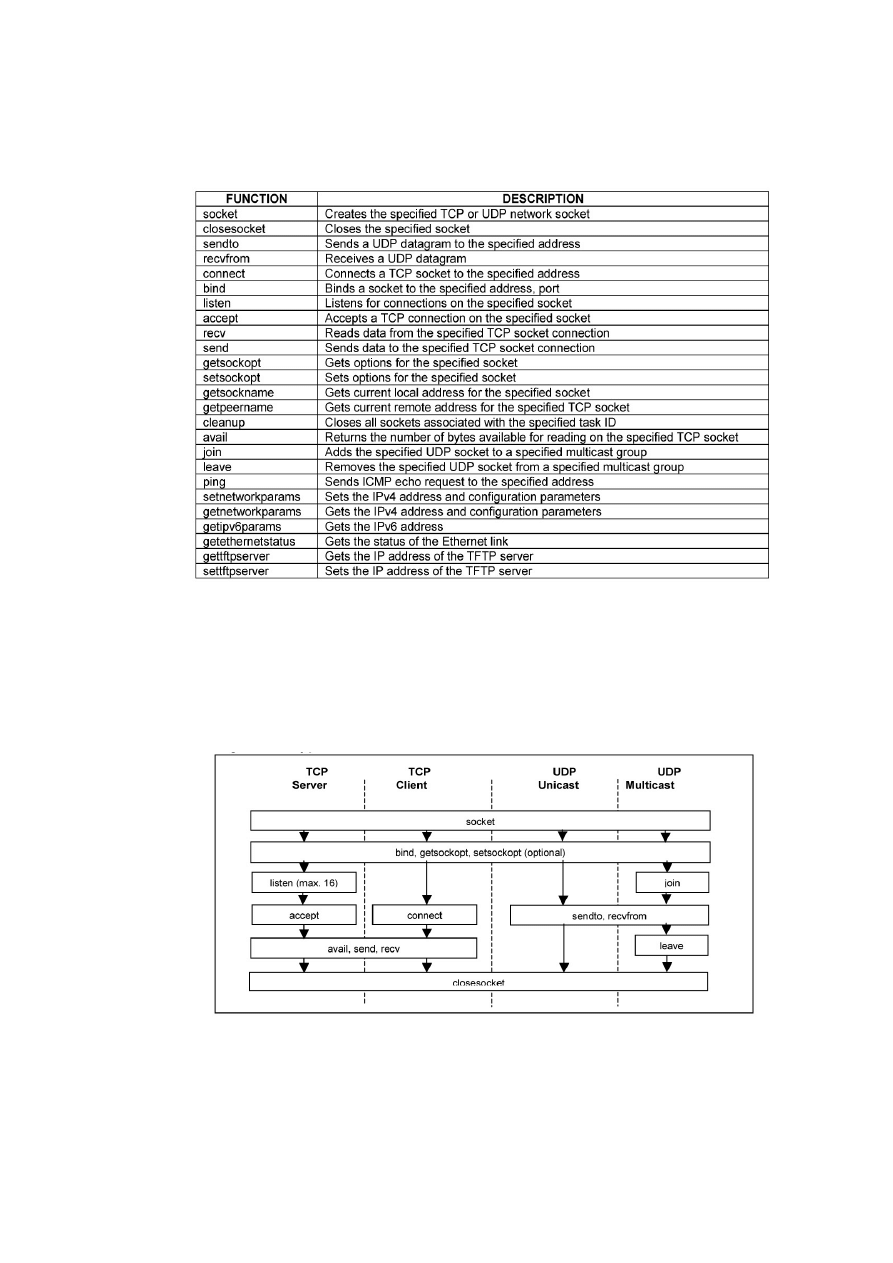
W pamięci ROM mikrokontrolera zostały zaimplementowane funkcje
obsługi gniazd TCP/IP zgodnie ze standardem Berkley. Stos obsługuje protokoły
TCP i UDP, umożliwiając utworzenie do 24 gniazd klient/serwer dla IPv4 lub
IPv6. W tabeli 4.1 przedstawiona jest lista funkcji obsługi gniazd, które zostały
zaimplementowane w pamięci ROM.
40
Tabela. 4.1 Funkcje obsługi gniazd zaimplementowane w pamięci ROM.
N
Na rysunku 4.4. przedstawiona jest typowa kolejność wywołań funkcji do
tworzenia połączeń server - klient dla protokołów TCP i UDP w
mikrokontrolerze DS80C400.
Rys.4.4. Tworzenie połączeń TCP i UDP

41
4.2. Projekt schematu blokowego sterownika
Przy projektowaniu schematu blokowego sterownika umożliwiającego
zadawanie i odczyt stanów poprzez sieć TCP/IP uwzględniłem następujące
czynniki:
• Mikrokontroler DS80C400 nie ma wewnętrznej pamięci do
przechowywania aplikacji napisanych przez użytkownika .
• Sterownik będzie korzystał z aplikacji napisanych w języku Java oraz
do pamięci programu zostanie zainstalowanie środowisko wykonawcze
TINI Java Runtime Environment [9] poprzez program MTK
(Microcontroller Tool Kit) [10] całość jest udostępniona przez firmę
Maxim/Dallas.
•
Sterownik zostanie podłączony do sieci typu Ethernet standardu
10Base-T i 100Base-TX.
• Mikrokontroler będzie się łączył z układem PHY(PHysical laYer)
wykorzystując interfejs MII (Media Independent Interface).
• Adres fizyczny MAC będzie odczytywany przez mikrokontroler z
układu DS2502-E48 [11].
• Sterownik zostanie wyposażony w układ RTC (Real Time Clock).
•
Uruchamianie aplikacji na sterowniku będzie wymagało wyposażenia
go w port szeregowy RS-232 typu DCE (Data Communication
Equipment) dodatkowo sterownik będzie wyposażony w port
szeregowy RS-232 typu DTE(Data Terminal Equipment).
42
• Sterownik będzie wyposażony w układ rezerwowego zasilania (battery
backup) dla przechowywania zawartości pamięci RAM i modułu
liczącego w układzie RTC, w chwili zaniku zasilania zasadniczego.
• Projekt sterownika zostanie wyposażony w blok zasilania z
odpowiednimi wartościami napięć do poszczególnych bloków
sterownika.
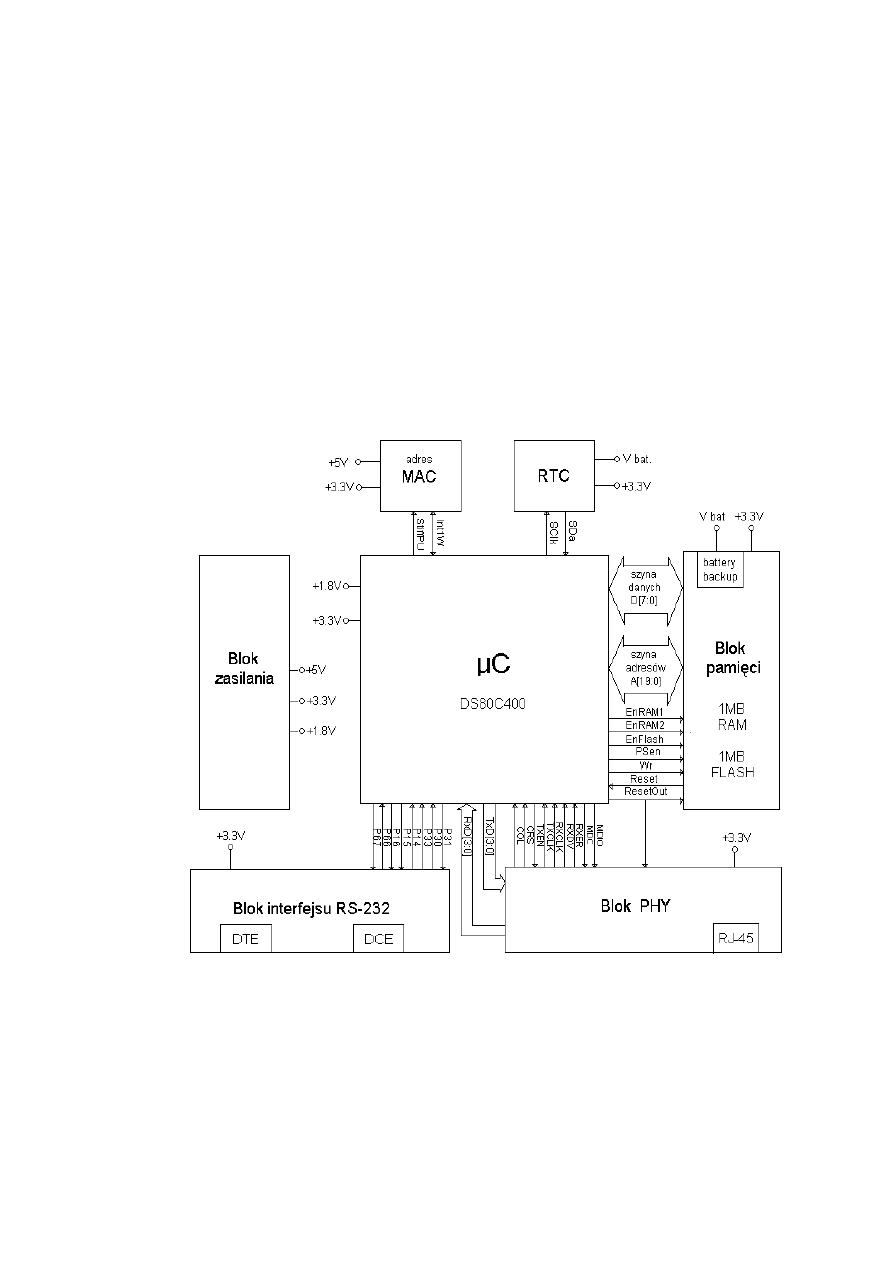
Projekt schematu blokowego umieściłem na rysunku 4.5
Rys.4.5 Schemat blokowy sterownika
43
4.3. Blok mikrokontrolera
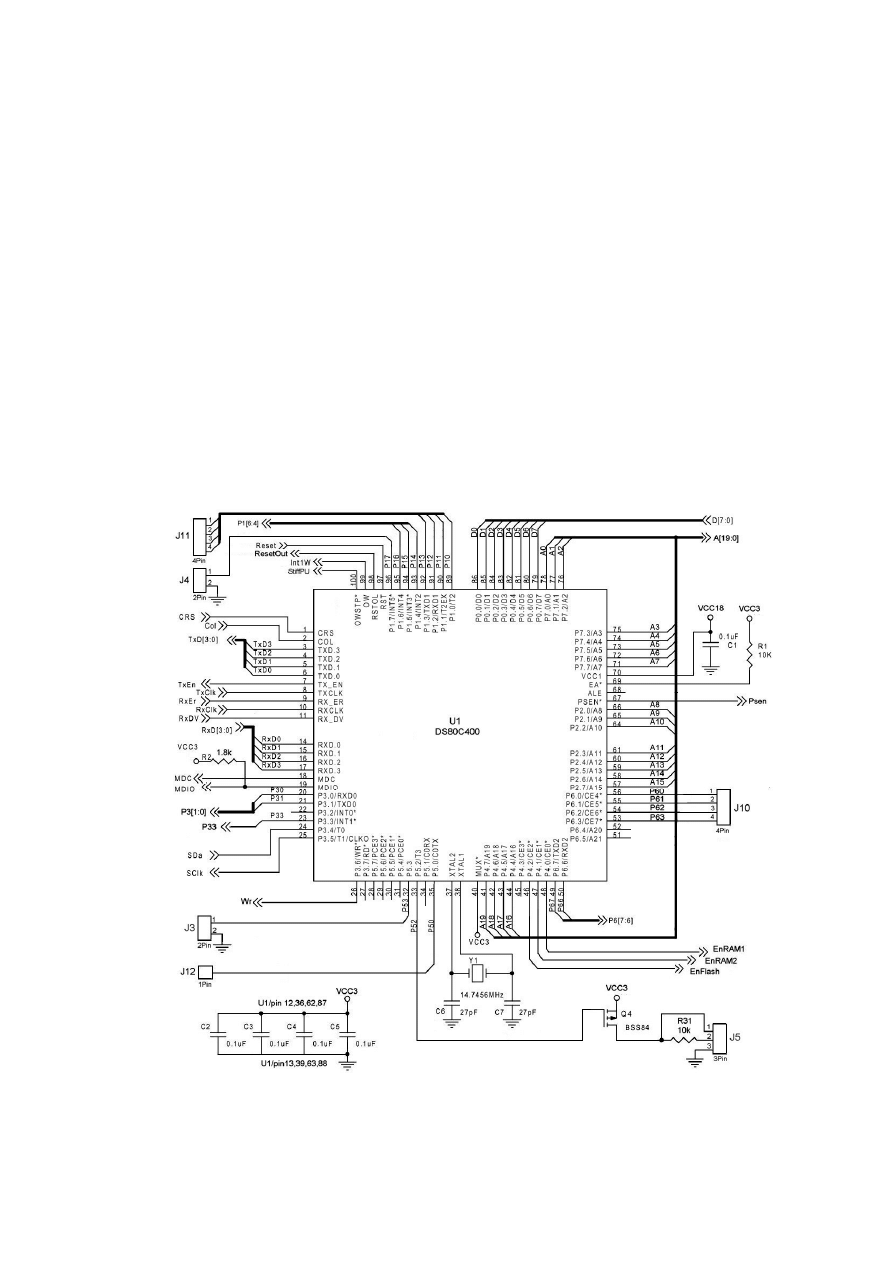
Schemat ideowy bloku mikrokontrolera przedstawiłem na rysunku 4.6.
Mikrokontroler DS80C400 jest zasilany dwoma napięciami +1,8V(praca rdzenia)
i +3V(operacje logiczne na I/O). Z blokiem pamięci pracuje w trybie
demultipleksowym. Mikrokontroler taktowany jest kwarcem o częstotliwości
14,7456 MHz, jest to optymalna częstotliwość kwarcu dla tego mikrokontrolera,
z faktu, że DS80C400 ma wewnętrzny mnożnik 2X/4X częstotliwości
rezonatora kwarcowego.
Rys.4.6. Schemat ideowy bloku mikrokontrolera
44
Blok mikrokontrolera został wyposażony w dwie listwy szpilkowe 4Pin
(J10 i J11) oraz punkt lutowniczy J12, służące jako port I/O sterownika.
4.4. Blok pamięci
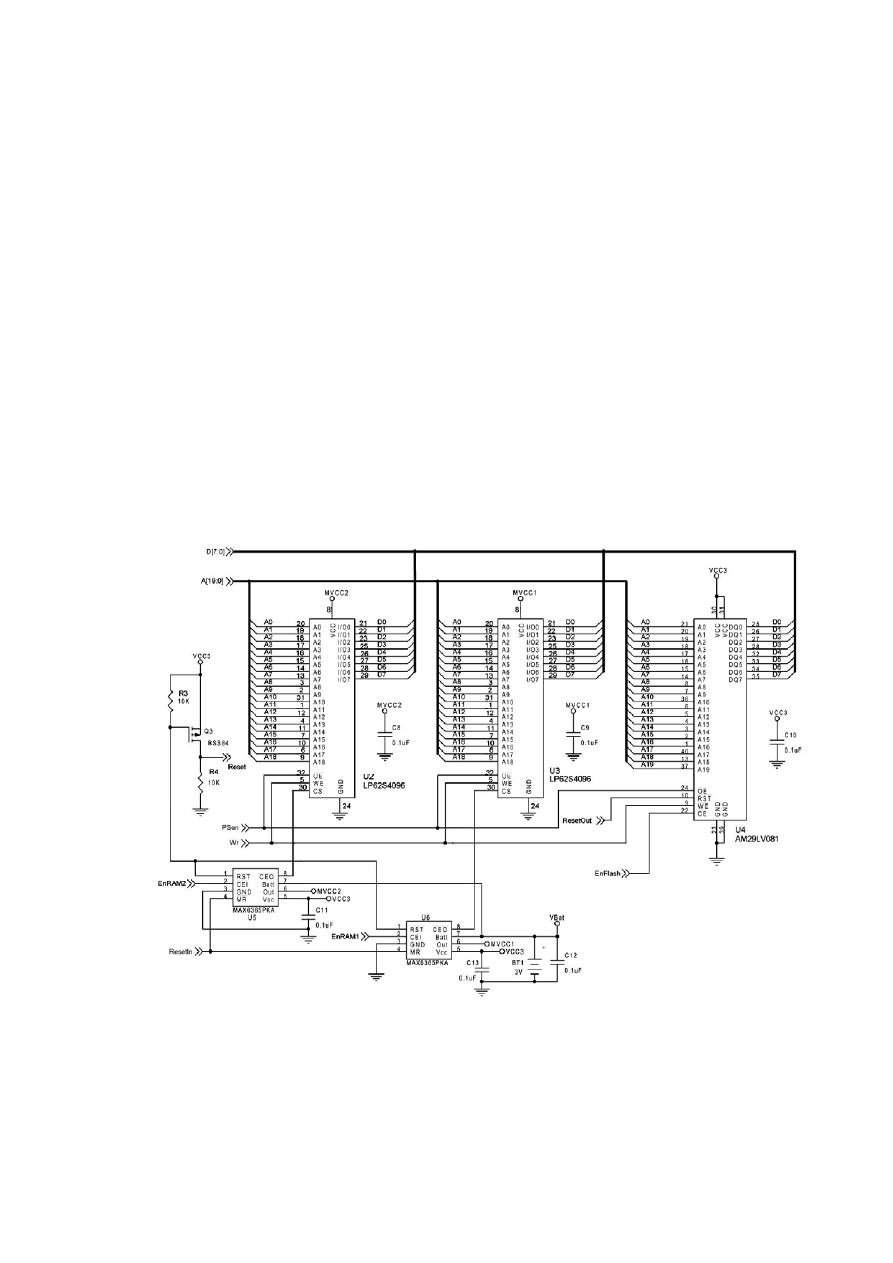
Schemat ideowy bloku pamięci jest przestawiony na rysunku 4.7. Blok
pamięci został wyposażony w 1MB pamięci Flash realizowanej na układzie U4
firmy AMD o oznaczeniu AM29LV081[12]. Jest to pamięć o organizacji
1MBx8bit, pamięć ta cechuje się niskim poborem mocy oraz ma gwarantowaną
przez producenta ilość cykli zapisu danych równą 10
6
.
Rys.4.7. Schemat ideowy bloku pamięci

45
Uaktywnienie pamięci Flash przez mikrokontroler jest dokonywane poprzez
wstawienie stanu niskiego na linii EnFlash. Podanie przez mikrokontroler stanu
niskiego na linii OutReset powoduje reset pamięci Flash. Blok pamięci RAM
mikrosterownika tworzą dwie 512kB pamięci RAM, o organizacji 512kBx8bit,
układy U2 i U3 firmy AMIC o symbolu LP62S4096[13]. Pamięci RAM również
mają niski pobór mocy oraz mogą pracować w trybie rezerwowego zasilania w
tzw. „battery backup operation”. Wybór danej pamięci RAM jest dokonywany
przez wstawienie przez mikrokontroler stanu niskiego na linii EnRAM1 lub
EnRAM2. Zastosowane pamięci, zarówno Flash i RAM maja jednakowy czas
dostępu równy 70ns. Układy U5, U6 produkcji Maxim/Dallas o oznaczeniu
MAX 6365[14], tworzą wraz z 3-voltową baterią litową układ rezerwowego
zasilania pamięci RAM. Układy firmy w zależności od wersji mają różny próg
napięcia V
TH
, przy którym w przypadku zaniku napięcia zasilania pamięci RAM
następuje przełączenie na zasilania bateryjne tej pamięci. W projekcie
sterownika zastosowane są układy MAX6365PKA31 z typową wartością
napięcia progu przełączania V
TH
= 3,08V, tak więc jeżeli napięcie zasilania
pamięci RAM obniży się poniżej danej wartości V
TH
, nastąpi przełączenie
zasilania na zasilanie bateryjne pamięci RAM. W czasie zaniku
zasilania układy
U5 i U6 generują sygnał resetu poprzez wyjście
RST
dla mikrokontrolera oraz
wstawiają stan niski na wyjściach
CEO
, uniemożliwiając w ten sposób wybór
pamięci dokonywany na liniach EnRAM1 i EnRAM2. Linia ResetIn służy do
resetowania mikrokontrolera DS80C400 w momencie uruchamiania programu
MTK na komputerze PC. Linia ta wykorzystuje sygnał DTR portu szeregowego.
Podanie stanu niskiego na linii ResetIn powoduje wstawienie sygnału niskiego
na wyjściach
RST
układów U5 i U6. Ponieważ mikrokontroler DS80C400 do
resetowania się potrzebuje sygnału wysokiego na linii Reset, konieczne jest
zastosowanie inwertera, który jest wykonany na tranzystorze Q3 produkcji
Fairchild semiconductor o symbolu BS84. Zapis i odczyt pamięci RAM i Flash
jest wykonywany przez mikrokontroler poprzez podanie sygnału niskiego
odpowiednio na liniach Wr i Psen.
46
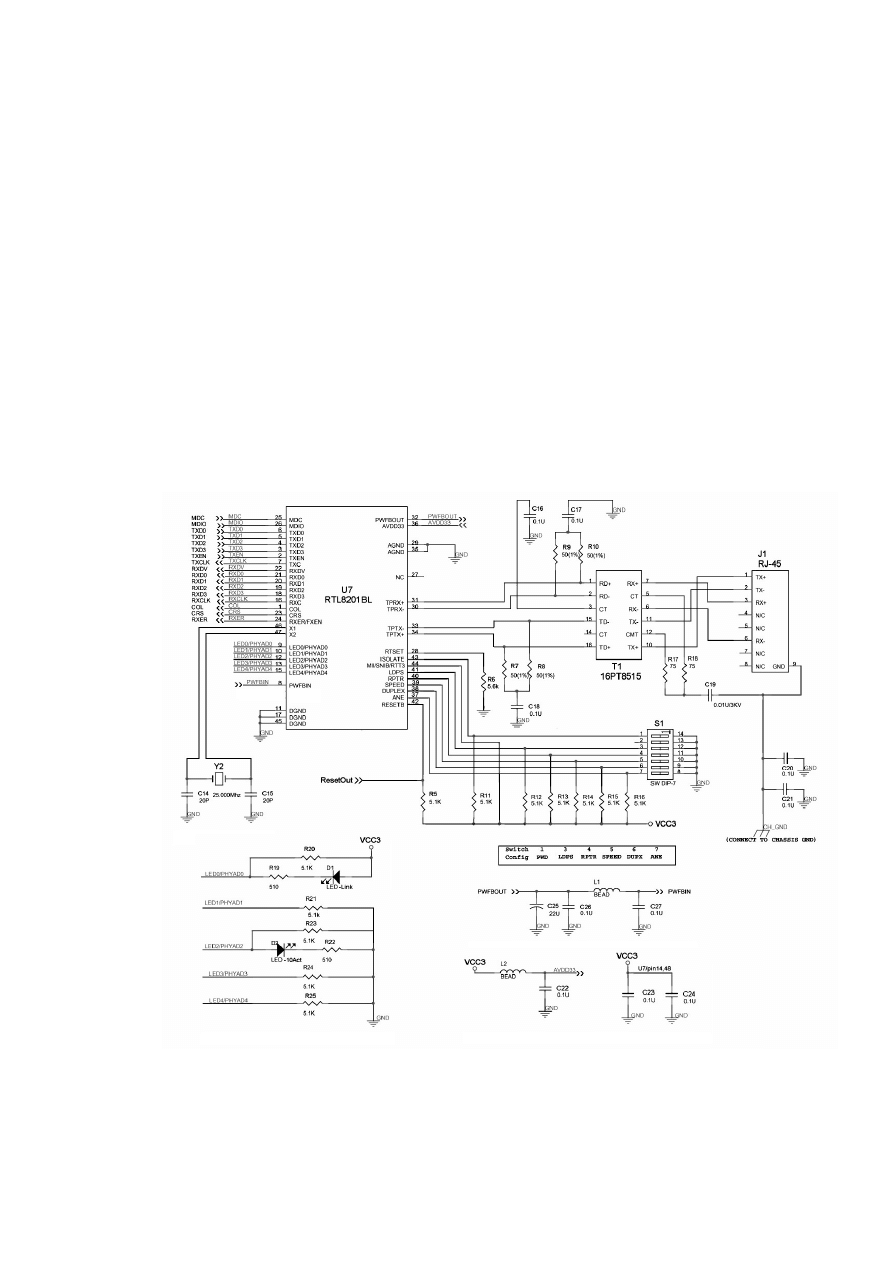
4.5. Blok PHY
Schemat ideowy bloku PHY przedstawiłem na rysunku 4.8. Transceiver
do sieci Ethernet tworzy układ U7 produkcji Realtek o oznaczeniu RTL
8201BL[15]. Układ ten obsługuje standardy sieci Ethernet typu 10Base-T,
100Base-TX oraz 100Base-FX. Praca układu może odbywać się w trybie full
duplex / half duplex, w strukturze układu zawarty jest mechanizm
autonegocjacji, służący do ustalania parametrów łącza(100Base-TX), układ
obsługuje interfejs MII i SNI, ten ostatni jest dostępny tylko dla standardu
10Base-T.
Rys.4.8. Schemat ideowy bloku PHY
47
Konfiguracja układu może odbywać sprzętowo poprzez podanie odpowiednich
stanów logicznych na wybranych wejściach układu, lub tez może odbywać
programowo przez kontroler MAC poprzez linie MDC/MDIO
.
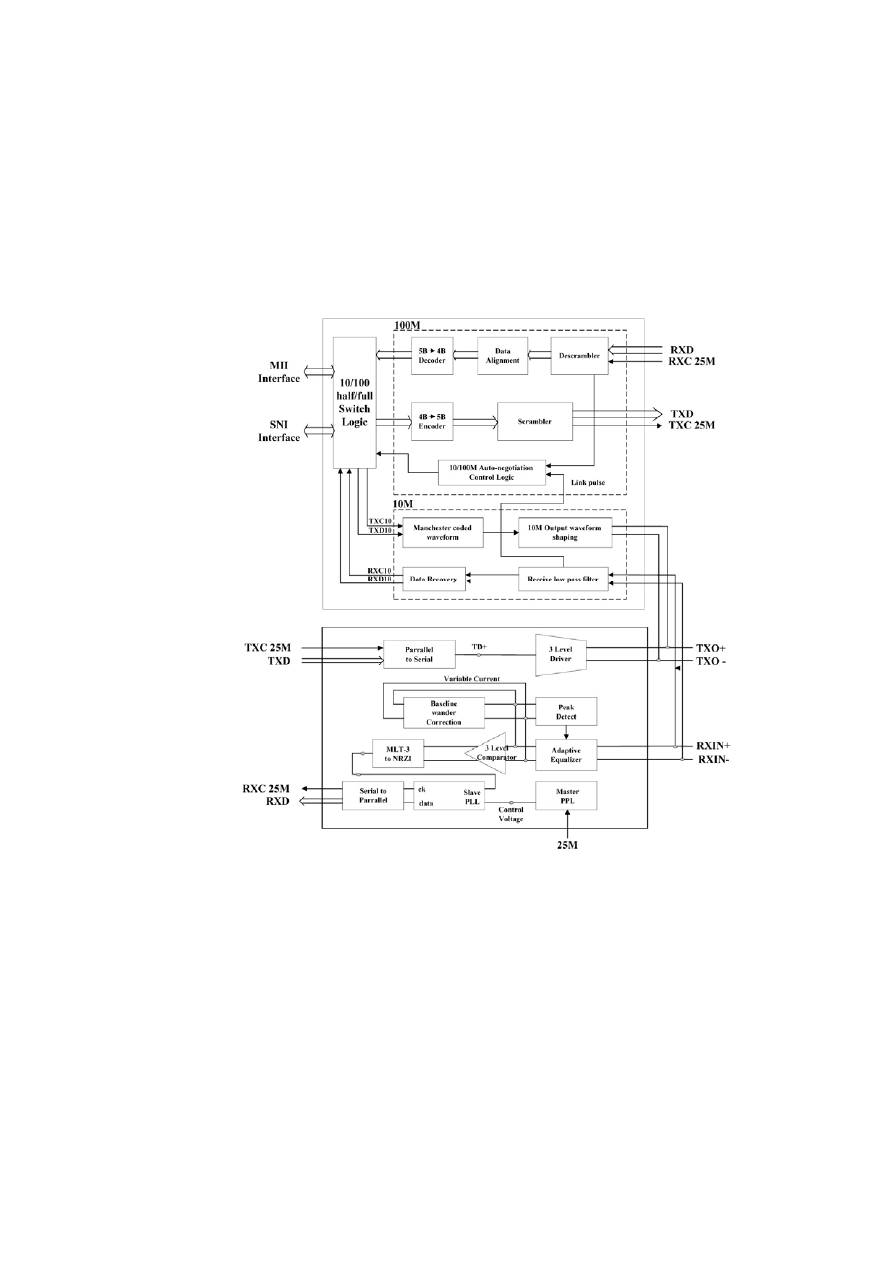
Schemat blokowy
układu RTL8201 BL umieściłem na rysunku 4.9.
Rys.4.9. Schemat blokowy układu RTL8201 BL
Struktura układu zawiera blok obsługi prędkości łącza 100Mbit/s (
wykorzystuje kod 4B/5B oraz liniowy trójpoziomowy kod MLT-3), blok obsługi
prędkości łącza 10Mbit/s (wykorzystywany kod Manchester) oraz jednostkę
przełączającą 10/100 half/full Switch Logic, która komunikuje bezpośrednio z
48
kontrolerem MAC poprzez interfejs MII/SNI . Interfejs MII składa się z 18
sygnałów (TXD[3:0], TXEN, TXCLK, CRS, COL, MDC, MDIO, RXD[3:0],
RXDV, RXCLK oraz RXER/FXEN). Dane są obsługiwane w sposób
synchroniczny i w zależności od prędkości łącza sygnały zegara TXCLK,
RXCLK wynoszą 25MHz przy 100Mbit/s i 2,5MHz przy 10Mbit/s. Podczas
nadawania MAC najpierw wstawia „jedynkę” na linii TXEN a następnie
zamienia dane na 4-bitowe ramki i podaje je na linie TXD[3:0] bloku PHY.
Transceiver PHY próbkuje dane na liniach TXD[3:0] z częstotliwością zegara na
linii TXCLK. Podczas odbioru danych układ PHY wstawia „jedynkę” na linii
RXEN a następnie podaje układowi MAC z częstotliwością zegara RXCLK, 4-
bitową ramkę na linie RXD[3:0]. Linie CRS i COL służą do detekcji i obsługi
kolizji. Układ RTL8201BL jest odseparowany od sieci Ethernet poprzez
transformator separujący. W projekcie został użyty transformator T1 firmy
Bothhand o oznaczeniu 16PT8515[20], z specyfikacją zgodną do układu
RTL8201BL. Jest to podwójny transformator separujący, z przekładnią sygnałów
nadawania równą 1:
2
oraz z przekładnią sygnałów odbierania równą 1:1.
Sprzętowa konfiguracja parametrów łącza jest wykonywana przez
przełącznik S1, gdzie poszczególne sekcje przełącznika oznaczają:
1. Tryb PWD (Power Down Mode), tryb o obniżonym poborze mocy, odłączony
zostaje interfejs zarządzania MDC/MDIO, tryb aktywowany stanem wysokim.
2. Sekcja nie podłączona
3. Tryb LDPS (Link Down Power Saving)
4. Tryb RPTR
5.Wybór prędkości pracy transceivera (10Mbit/s -stan niski lub 100Mbit/s-stan
wysoki).
6.Wybór trybu pracy transceivera Full duplex-stan wysoki lub Half duplex-stan
niski.
7. Tryb autonegocjacji.
49
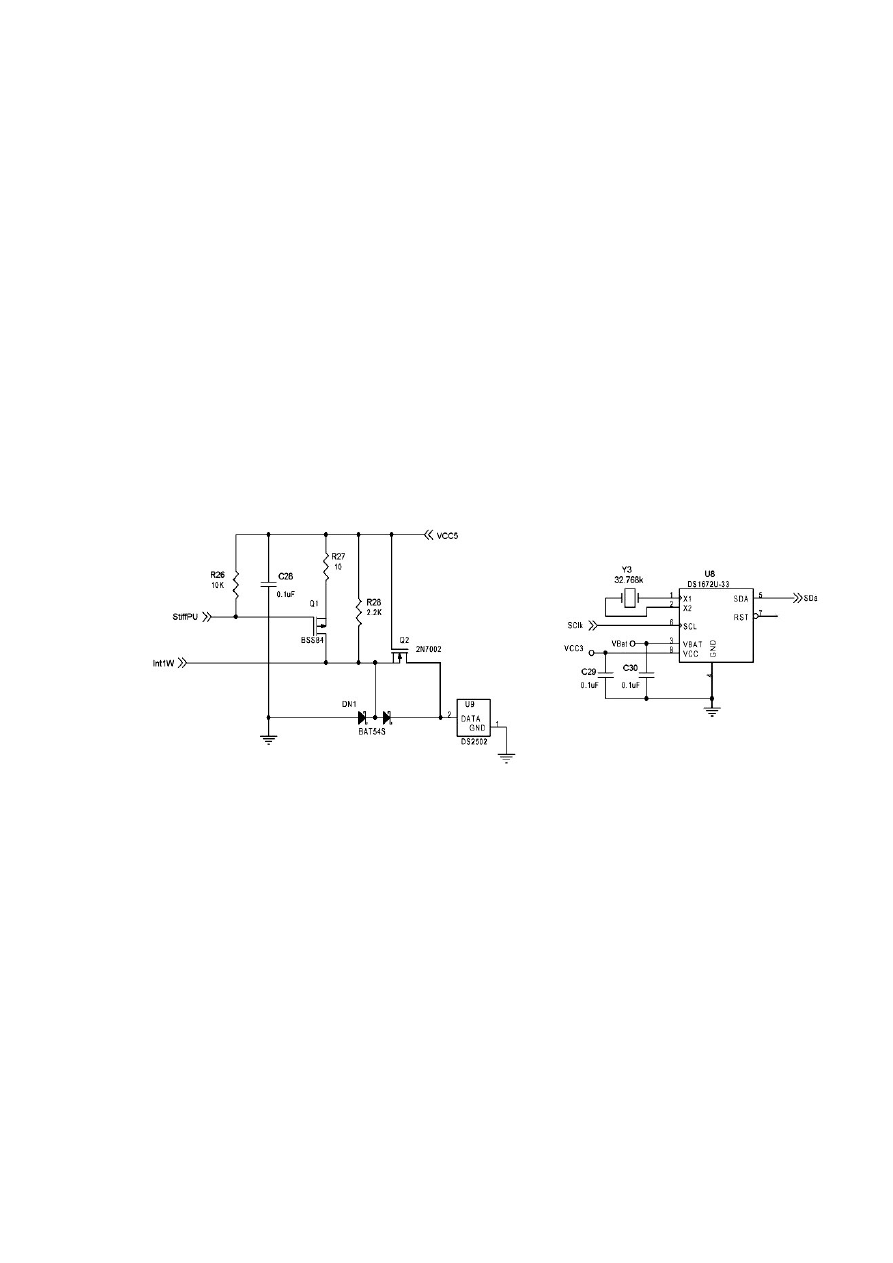
4.6. Blok RTC i adresu MAC
Schemat ideowy bloku RTC i adresu MAC przedstawiłem na rysunku
4.10. Adres fizyczny MAC sterownika jest pobierany z układu U9 firmy
Maxim/Dallas o oznaczeniu DS2502-E48. Jest to pamięć o pojemności 1kbit-a
typu OTP-EPROM, gdzie w pierwszych 32-bajtach tej pamięci jest zawarty
unikatowy 48-bitowy adres MAC przydzielony przez IEEE. Pierwsze 32-bajty
pamięci DS2502-E48 są chronione przed zapisem, tak więc dla użytkownika jest
dostępne raz programowalne 768 bity. Do komunikacji pamięci U9 z
mikrokontrolerem wykorzystywany jest interfejs 1-Wire.
Rys.4.10. Schemat ideowy bloku adresu MAC (po lewej stronie) i bloku RTC (po
prawej stronie)
Blok RTC oparty jest na układzie U8 o symbolu DS1672U-33 [16] firmy
Maxim/Dallas. Jest to układ czasowy rodziny Timekeeper, wyposażony w
wewnętrzny obwód resetujący i przełącznik zasilania podtrzymującego. Pozwala
wyeliminować kilka niezależnych układów scalonych, wymaganych dotąd do
realizacji tych funkcji oraz pracuje z niskim napięciem zasilania z zakresu od
2,0V do 3,3V. Komunikacja z mikroprocesorem jest realizowana za

50
pośrednictwem 2-żyłowego interfejsu. DS1672U-33 zawiera 32-bitowy licznik
sekund, z którego na podstawie programowego algorytmu wyznaczane są data i
godzina. W projekcie sterownika układ DS1672 jest
taktowany wbudowanym
generatorem, wymagającym dołączenia zewnętrznego rezonatora kwarcowego
32,768 kHz. Podtrzymanie pracy zegara zapewnia dodatkowe wyprowadzenie
zasilające, przeznaczone do podłączenia baterii o napięciu 3 V.
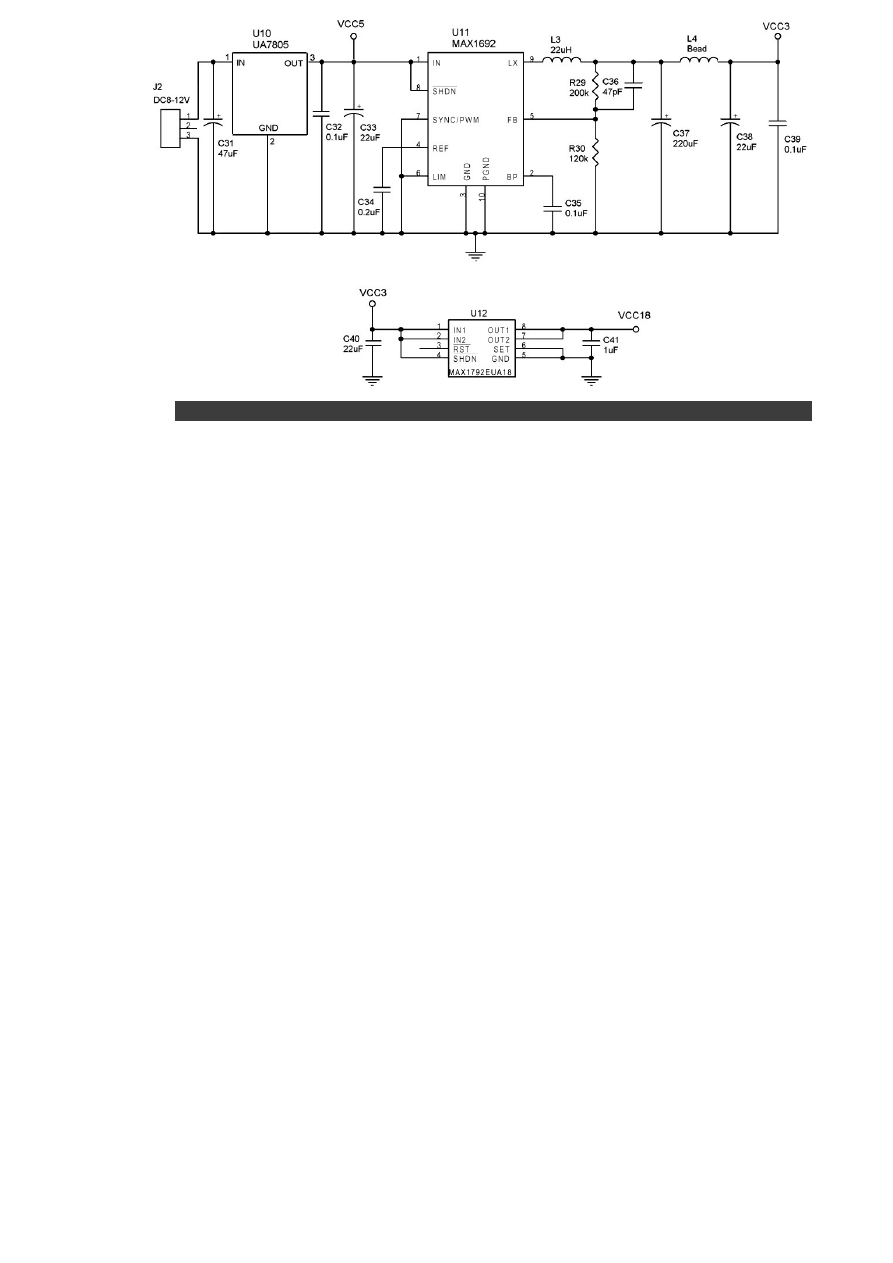
4.7. Blok zasilania
Schemat ideowy bloku zasilania jest przedstawiony na rysunku 4.11. Do złącza
J2 dostarczane jest napięcie niestabilizowane ze zewnętrznego zasilacza o
wartości DC = 8 V...12V. Układ U9 jest to typowy stabilizator 5V w obudowie
TO-220 o oznaczeniu UA7805. Układ U11 tworzy stabilizator napięcia 3,3V,
który jest wykonany na układzie MAX1692 [17] firmy Maxim/Dallas. Jest to
impulsowy stabilizator PWM, charakteryzujący się bardzo dobrą sprawnością
(95% według danych producenta) i z wydajność prądową około 600mA Na
rysunku 4.11 jest przedstawiony typowy układ połączeń dla tego stabilizatora.
Ponieważ jest to stabilizator impulsowy na wyjściu został zastosowany koralik
ferrydowy L4 służący do tłumienia częstotliwość pracy stabilizatora. Układ U12
o symbolu MAX1792EUA18 [18] również produkcji MaximDallas jest 1,8 V
stabilizatorem napięcia typu Low-dropout dla zasilania rdzenia mikrokontrolera
DS80C400.
51
Rys. 4.11 Schemat ideowy bloku zasilania
4.8. Blok interfejsu RS-232
Schemat ideowy bloku interfejsu RS-232 umieściłem na rys.4.12. Układ
U13 o oznaczeniu MAX560 [19] produkcji Maxim/Dallas, jest 3,3V
transceiverem obsługującym standard transmisji szeregowej RS-232. W 28-
nóżkowej obudowie typu SOP producent umieścił bufory odwracające składające
się z czterech linii nadawczych i pięciu linii odbiorczych oraz konwerter
poziomów napięć z +3,3V na
±6,6V. Konwerter napięć wymaga dołączenia
czterech kondensatorów o pojemności 1
µF .
Rys.4.12 Schemat ideowy bloku interfejsu RS-232
W projekcie został użyty port typu DCE (złącze J8), do którego jest
„ładowane” oprogramowanie sterownika poprzez komputer PC z interfejsem
52
szeregowym oraz port typu DTE (złącze J9) oraz port typu DTE (złącze J9),
gdzie w przypadku odpowiedniego programu umieszczonego w sterowniku
mogą zostać podłączone inne urządzenia posiadające port szeregowy. Układ
MAX560 posiada tzw. tryb „Shutdown Mode”, przy którym linie nadawcze
transceivera są odłączone, wyłączony zostaje też konwerter napięć a sygnały +V
i –V zostają podłączone z sygnałami odpowiednio VCC i GND. Uaktywnienie
tego trybu jest dokonywane przez wstawieni stanu L na linii
SHDN
transceivera
do którego służy złącze J7. Złącze J6 umożliwia reset mikrokontrolera w
momencie uruchamiania programu MTK na komputerze PC.
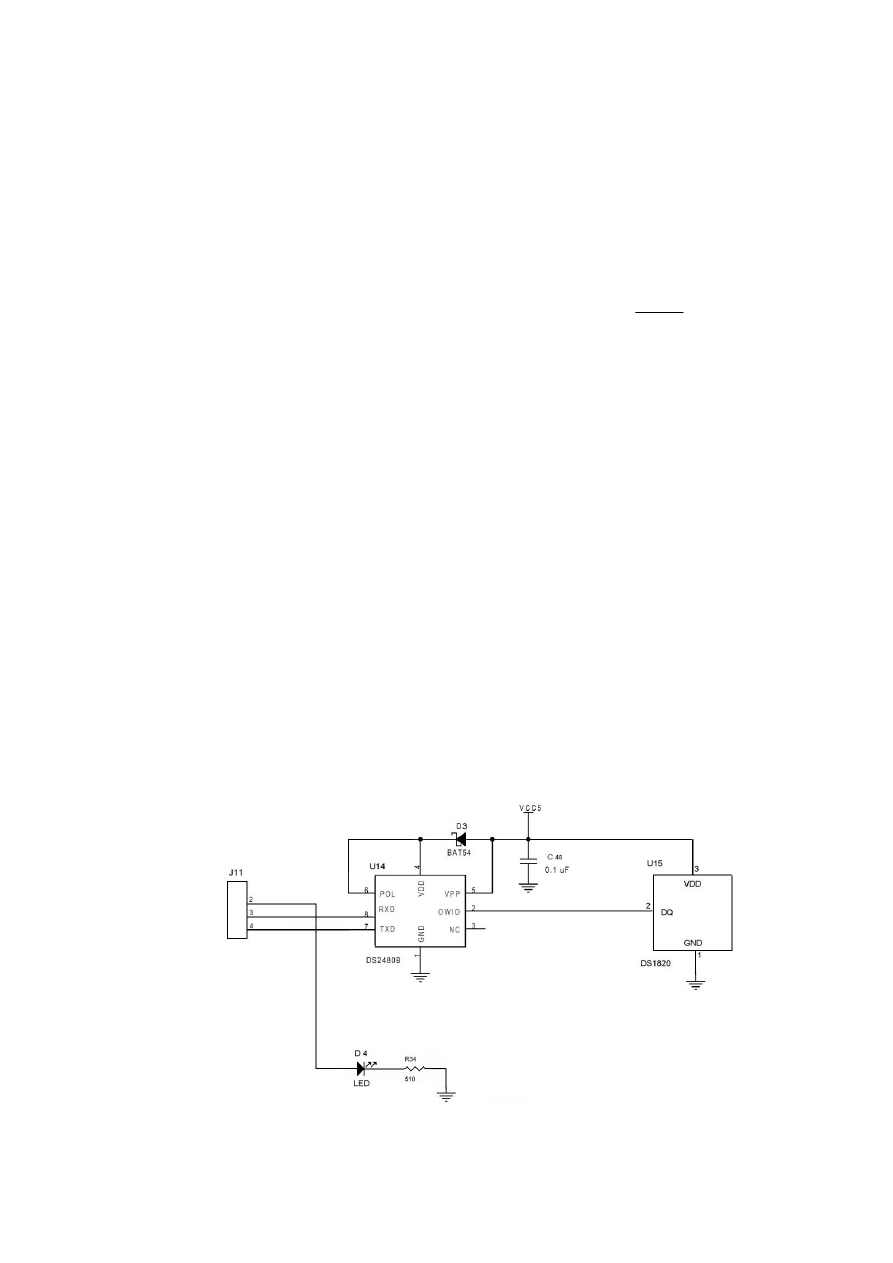
4.9. Układ do odczytu temperatury i włączania
diody LED
Zaprojektowany sterownik umożliwia poprzez sieć TCP/IP odczyt
temperatury z zewnętrznego czujnika temperatury oraz zapalanie diody LED .
Do obsługi tych urządzeń potrzeba jest przystawka (oddzielna płytka PCB),
schemat ideowy przystawki umieściłem na rysunku 4.13.

53
Rys.4.13. Schemat ideowy przystawki do pomiaru temperatury i
włączania
diody LED
Czujnikiem temperatury jest układ U15 o oznaczeniu DS1820 [20]
produkcji Maxim/Dallas. Jest cyfrowy czujnik temperatury o bardzo dobrej
dokładności pomiaru (
± 0,5°C w zakresie od -10°C do +85°C), wyposażony w
interfejs 1-Wire. Układ U14 o symbolu DS2480B [21] również firmy
Maxim/Dallas jest konwerterem interfejsu jednoliniowego (1-Wire) na interfejs
szeregowy. Dioda D4 jest zapalana przez odpowiednią aplikację wykorzystującą
sieć TCP/IP.
4.10. Wykaz elementów
Wykaz elementów użytych do wykonania sterownika jest przedstawiony poniżej.
Rezystory :
R5,R11,R12,R13,R14,R15,R16....................................................................5,1k
R27............................................................................................................... 10
Rezystory SMD :
R1,R3,R4,R10,R31,R33............................................................................... 10k
R2................................................................................................................ 1,8k
R6................................................................................................................ 5,6k
R20,R21,R24,R25...................................................................................... 5,1k
R7,R8,R9,R10.............................................................................................. 50
R17,R18....................................................................................................... 75
R19,R22,R34................................................................................................ 510
R28............................................................................................................... 2,2k
R29.............................................................................................................. 200k
R30.............................................................................................................. 120k
R32.............................................................................................................. 47k
Kondensatory SMD :
C1,C2,C3,C4,C5,C8,C9,C10,C11,C12,C13,C16, C17,C18,
C20,C21,C22,C23,C24,C26,C27,C28,C30,C32,C35,C39,C45,C48...........100nF
C6,C7...........................................................................................................27pF
C14,C15.......................................................................................................20pF
C34...............................................................................................................220nF
C36...............................................................................................................47pF
Kondensatory tantalowe SMD :

54
C25,C33,C38,C40........................................................................................22uF/16V
C41,C42,C43,C44,C46................................................................................1uF/16V
Kondensatory elektrolityczne :
C31.......................................................................................... ...................47uF/16V
Diody SMD :
DN1..............................................................................................................BAT54S
D3.................................................................................................................BAT54
Tranzystory SMD :
Q1,Q3,Q4…………………………………………………………………..BSS84
Q2…………………………………………………………………………..2N7002
Układy scalone :
U1……………………………………………………………………….DS80C400
U2,U3……………………………………………….………………… LP62S4096
U4.............................................................................................................AM29LV081
U5,U6.....................................................................................................MAX6365PKA31
U7............................................................................................................RTL8201BL
U8............................................................................................................DS1672U-33
U9............................................................................................................DS2502-E48
U10............................................................................................................UA7805
U11............................................................................................................MAX1672
U12.......................................................................................................MAX1792EUA18
U13..............................................................................................................MAX560
U14..............................................................................................................DS2480B
U15...............................................................................................................DS1820
Rezonatory kwarcowe:
Y1................................................................................................................14,7456MHz
Y2................................................................................................................25,0000MHz
Y3................................................................................................................32,768kHz
Inne :
Bateria litowa 3V BT1: CR2016
Diody LED :D1,D2
Gniazda : RJ-45, DB9-M, DB9-F, gniazdo zasilania
Przełącznik typu „SwitchDIP”
Listwy szpilkowe

55
:
5. Wykonanie i uruchomienie zapro-
jektowanego sterownika
W rozdziale piątym pracy przedstawiłem projekt płytki drukowanej
sterownika, sposób wykonania płytki drukowanej, uruchomienie
sterownika oraz zainstalowanie przykładowych aplikacji do danego
sterownika.

56
5.1. Projekt płytki drukowanej
Płytkę drukowaną sterownika internetowego zaprojektowałem przy
pomocy programu Protel 99 SE, firmy Protel International. Projekt płytki
drukowanej wykonałem przy użyciu dwóch warstw, co zminimalizowało
wymiary płytki, jej wymiary wynoszą 115mmx115mm. Dla skutecznego
rozprowadzenia prądów zasilania, szerokości ścieżek zasilających i masy zostały
powiększone do niezbędnych rozmiarów. Szerokości ścieżek zaczynają się od
0,2mm do 3mm. Małe szerokości połączeń są użyte do komunikacji
mikrokontrolera z blokiem pamięci i blokiem PHY, ponieważ większość tych
układów ma rozstaw wyprowadzeń równy 0,5mm, a to z kolei wymusza
odpowiednią szerokość ścieżki. Najgrubsze połączenia stanowią linie zasilające
poszczególne układy sterownika. Na płytce drukowanej sterownika zostały
umieszczone wszystkie złącza występujące w schemacie ideowym sterownika.
W warstwie tylnej płytki drukowanej zostało przewidziane miejsce na 3-voltową
57
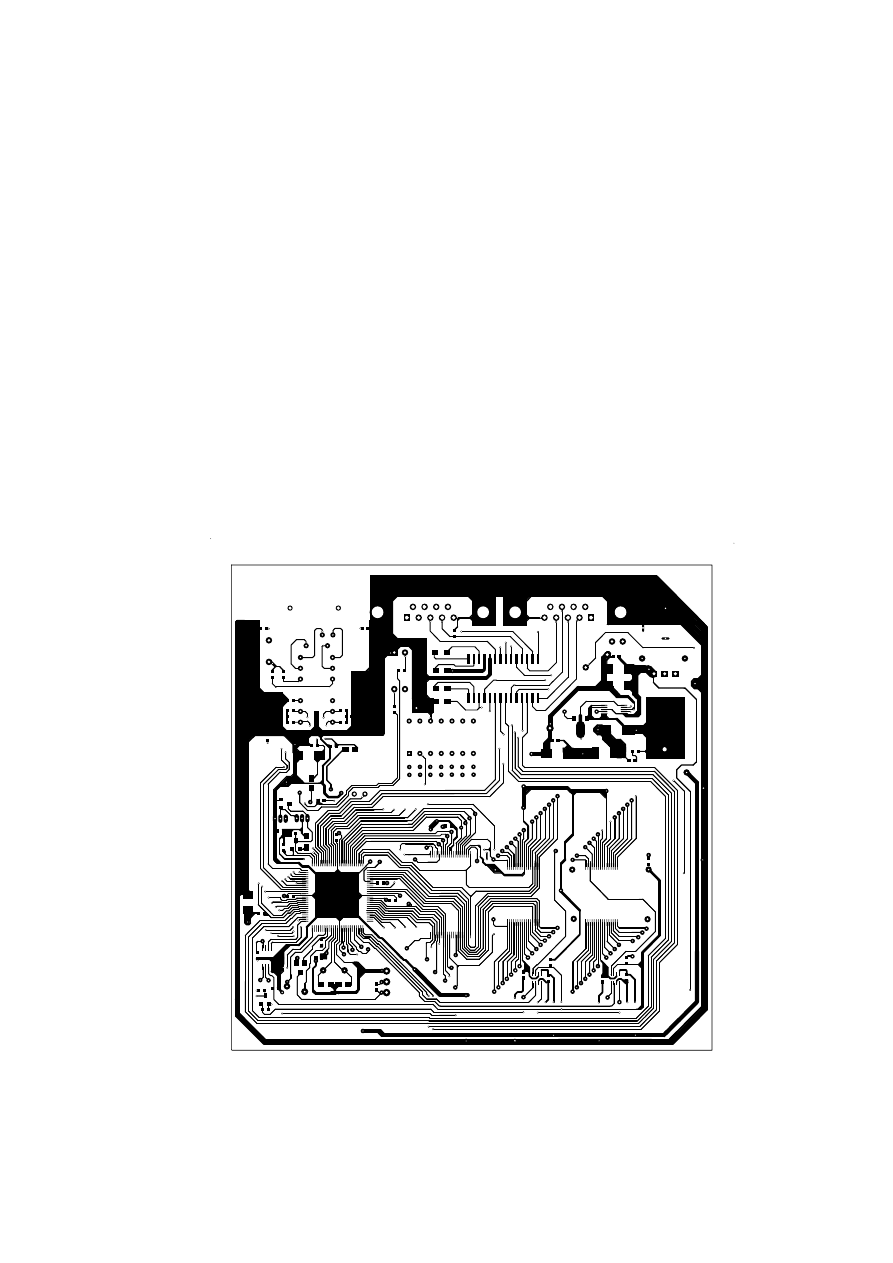
baterię BT1 dla układu rezerwowego zasilania. Na rysunku 5.1. przedstawiłem
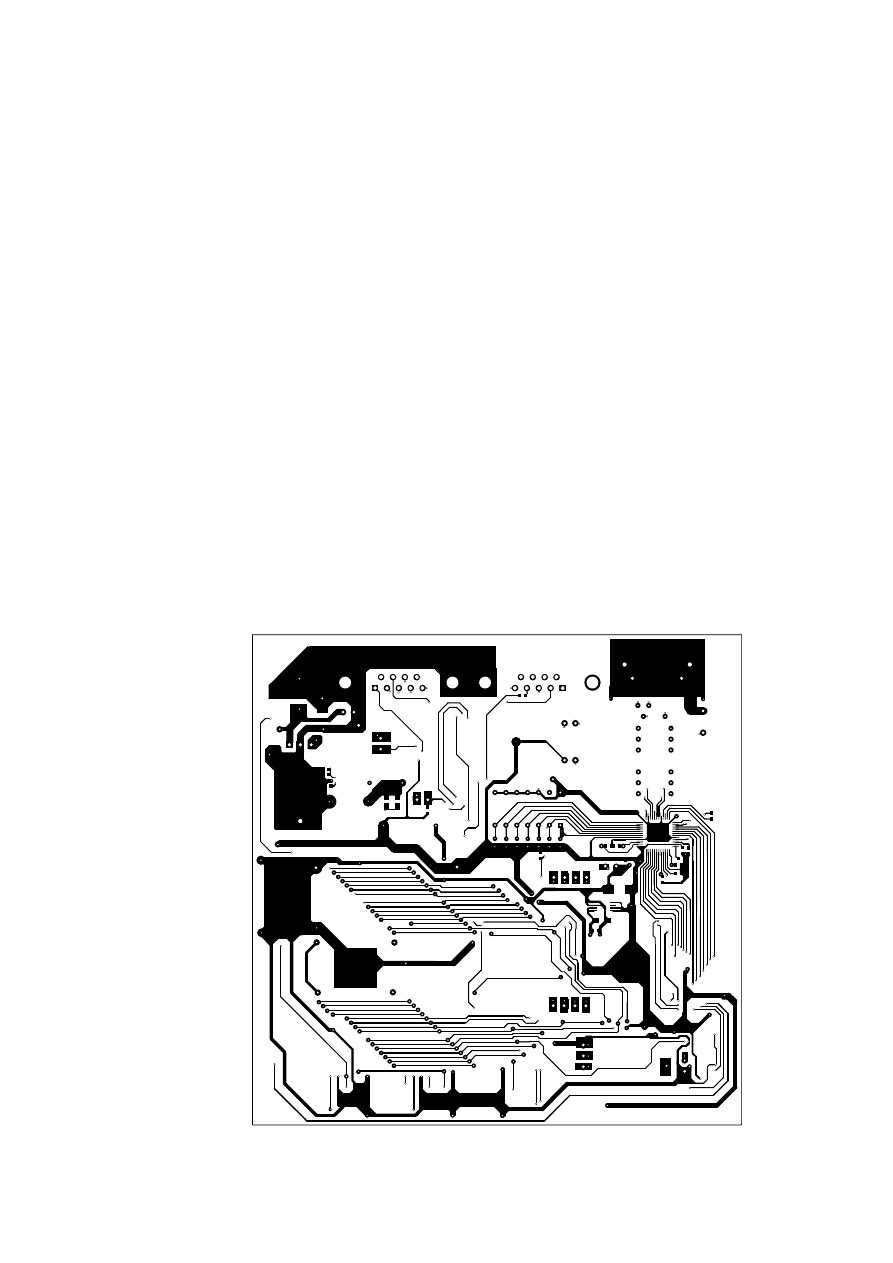
widok górnej warstwy płytki drukowanej (Top Layer), natomiast na rysunku 5.2
przedstawiony jest widok tylnej warstwy płytki drukowanej (Bottom Layer).
Zamieszczone na rysunkach płytki są przedstawione w skali 1:1.
58
Rys.5.1. Widok górnej warstwy płytki drukowanej sterownika
w skali 1:1

59
Rys.5.2. Widok dolnej warstwy płytki drukowanej sterownika
w skali 1:1
5.2 Wykonanie sterownika
Płytka drukowana została wykonana metodą fotolitografii. Jako środek
światłoczuły został użyty positiv20. Na początku laminat dwustronny został
odpowiednio wycięty (1cm więcej od każdego boku ) a następnie został
wypolerowany bardzo drobnoziarnistym papierem ściernym. Użycie papieru
ściernego dokładnie wyczyściło laminat od innych substancji. Po przygotowaniu
laminatu została nałożona warstwa emulsji światłoczułej (positiv20), która
następnie została wysuszona. Widoki warstwy górnej i dolnej zostały
wydrukowane na folii z drukarki atramentowej ustawionej na maksymalną
rozdzielczość. Do naświetlania emulsji użyłem lampy halogenowej. Na każdą
powierzchnię laminatu nakładem folię z wzorem płytki ( atramentem do
powierzchni laminatu) i przyciskałem kawałkiem pleksy w celu dokładnego
dociśnięcia folii do laminatu. Przedstawiony proces naświetlania wymagał około
30 minut naświetlenia emulsji światłoczułej dla każdej z obu powierzchni
laminatu. Trudnością przy naświetlaniu laminatu okazało się spasowanie obu
60
warstw co wymagało wywiercenia kilku otworów służących jako przelotki na
płytce drukowanej i spasowania folii pod „światło”. Po naświetleniu
poszczególnych warstw płytka drukowana musiała zostać wywołana
wykorzystując do tego wodorotlenek sodu NaOH w odpowiedniej proporcji z
wodą. Po wywołaniu płytki drukowanej została ona wytrawiona za pomocą
środka trawiącego B327. Mając gotowa płytkę drukowaną sterownika
przystąpiłem do nawiercania otworów na poszczególne elementy sterownika oraz
przelotek, które w projekcie są wykonane poprzez cienki drucik lutowany na
górnej i dolnej warstwie płytki. Otwory były wiercone wiertłem o średnicy od
0,5mm do 0,8mm. Następnym etapem wykonania sterownika było wlutowanie
wszystkich układów sterownika. Na początku zostały zalutowane druciki służące
jako przelotki oraz najmniejsze elementy ( rezystory SMD, kondensatory SMD
diody SMD i tranzystory SMD). Następnym krokiem było zmontowanie bloku
zasilania , gdzie po sprawdzeniu zgodności napięć wyjściowych zamontowane
zostały pozostałe układy sterownika. Płytka drukowana została wyposażona w
„stopki” wykonane z czterech śrubek M3 wkręconych na rogach płytki. Zdjęcie
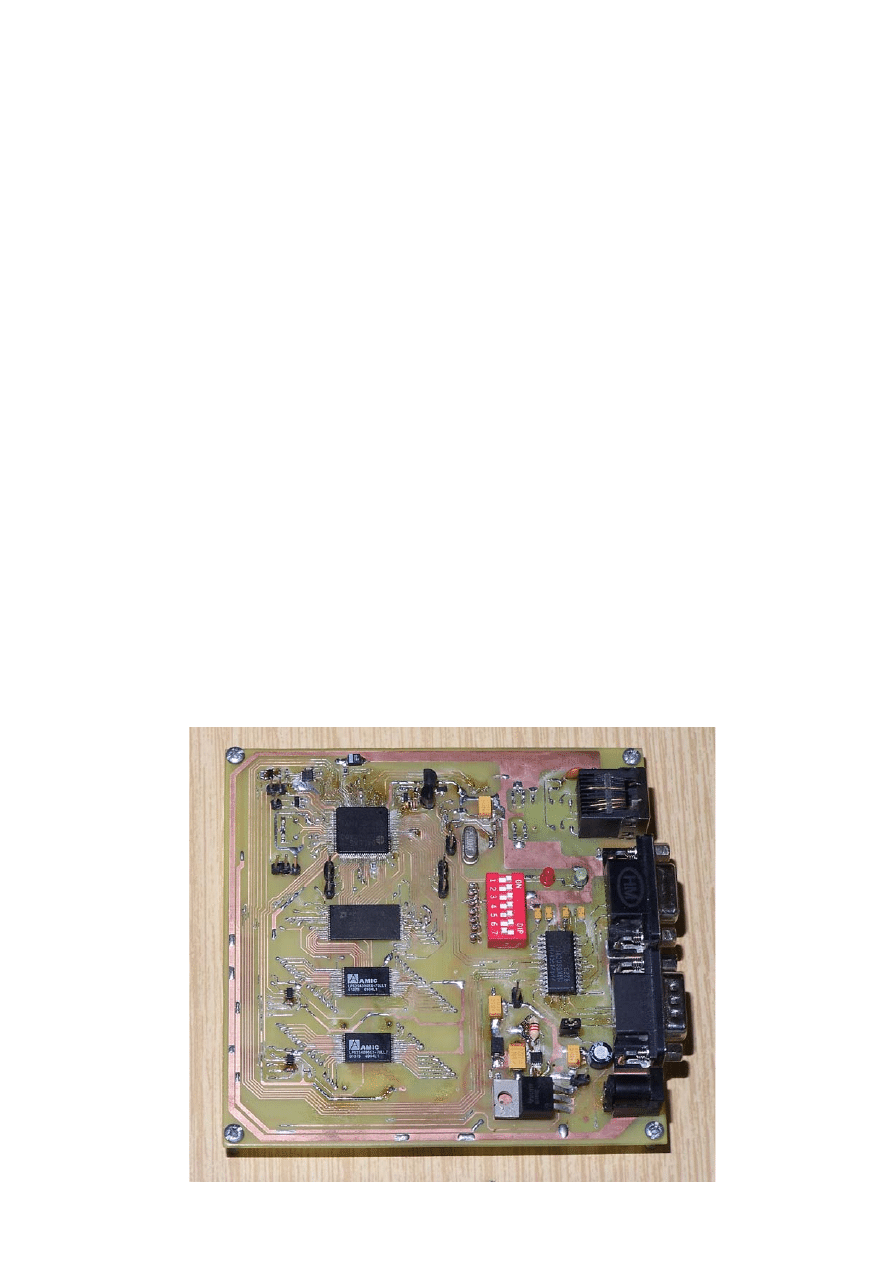
wykonanego sterownika umieściłem na rysunku 5.3.

61
5.3.
Zdjęcie wykonanego sterownika umożliwiającego zadawanie i odczyt
stanów poprzez sieć TCP/IP
5.3. Zainstalowanie środowiska wykonawczego do
sterownika
Przedstawiony projekt sterownika umożliwiający zadawanie i odczyt
stanów poprzez sieć TCP/IP wykorzystuje aplikacje napisane w języku Java.
Aplikacje te są wykonywane w sterowniku poprzez środowisko wykonawcze
TINI Java Runtime Environment, które musi być zainstalowane wewnątrz
sterownika. Do zainstalowania środowiska wykonawczego potrzebny jest
program o nazwie MicroController Tool Kit (MTK) oraz oprogramowanie TINI
SDK w wersji co najmniej 1.1. Program MTK pracuje pod systemem Windows
98/Me/2000/XP. Po uruchomieniu programu MTK, musimy skonfigurować port
szeregowy do którego jest podłączony sterownik. Połączenie sterownika z
komputerem PC odbywa się kablem typu „prosty”. Po skonfigurowaniu portu
szeregowego i jego otwarciu wyświetla program ładujący tzw. Auto Boot
Loader, który jest na stałe zapisany w pamięci ROM mikrokontrolera. Program
ładujący zarządza ładowanie środowiska wykonawczego do pamięci flash
62
sterownika. Na rysunku 5.4. przedstawiłem widok programu MTK z
uruchomionym Auto Boot Loader-em. Do zainstalowania TINI Java Runtime
Environment wymagane jest załadowanie dwóch plików : tini.tbin oraz
slush.tbin, które znajdują się w oprogramowaniu TINI SDK. Pliki można
załadować wybierając zakładkę File
→Load Tbin i ustawiająć ścieżkę dostępu do
TINI SDK. Plik tini.tbin jest ładowany w pamięci flash o adresie od 400000h do
47000h natomiast plik slush.tbin załadowany zostaje w pamięci flash od adresu
47100h do adresu 48000h ,przestań pamięci miedzy adresami 47000h a 47100h
zostaje wykorzystana do zapamiętywania ustawień sieciowych. sterownika. Po
załadowaniu tych dwóch plików sterownik ma zainstalowane środowisko
wykonawcze, które składa się z systemu operacyjnego TINI OS wirtualnej
maszyny Java i interfejsu API (Application Programming Interface ). Widok
programu MTK przedstawiającego system operacyjny TINI OS umieściłem na
rysunku 5.5.
Rys.5.4 Widok programu MTK z uruchomionym Auto Boot Loader -em
63
Rys.5.5 Widok programu MTK z uruchomionym systemem operacyjnym
TINI OS
Po zalogowaniu się do środowiska TINI uruchamia się prosty interpretator
poleceń systemu operacyjnego tzw. Slush. Interpretator ten steruje funkcjami
sytemu poprzez wpisanie odpowiedniego polecenia np. dane o konfiguracji
sieciowej są wywoływane poprzez wpisanie polecenia ipconfig. Na rysunku 5.6.
umieściłem widok programu MTK przedstawiającego ustawienia sieciowe
sterownika, wyświetlany jest również na nim adres MAC (Ethernet Address)
pochodzący od układu DS2502-E48.

64
Rys.5.6 Widok programu MTK przedstawiającego ustawienia sieciowe sterownika
Zmiana ustawień sieciowych jest dokonywana poprzez dodanie do polecenia
odpowiedniego znaku oraz wartości danej np. polecenie ipconfig –a 192.168.0.2
ustawia adres IP sterownika. Oprócz ustawień sieciowych slush umożliwia
sterowaniem układu RTC, umożliwia połączenia sieciowe FTP oraz połączenia
Telnet. Uruchamia również aplikację pisane w języku Java po wcześniejszym
przekształceniu beta kodu ( pliki z rozszerzeniem .class) na pliki uruchamiane
przez maszynę wirtualną Java w środowisku TINI (pliki z rozszerzeniem .tini).
5.4. Uruchomienie przykładowych aplikacji
W projekcie zostały użyte dwie aplikacje napisane w języku Java (po
niewielkiej modyfikacji), które dostępne są na stronie internetowej
producenta mikrokontrolera po DS80C400. Aplikacje te umożliwiają
zadawanie i odczyt stanów poprzez sieć TCP/IP. Pierwsza z nich o
nazwie TINIWebServer umożliwia odczyt temperatury z czujnika
dołączonego do sterownika. Druga aplikacja o nazwie TINIWebSwitch
umożliwia zadawanie stanu (włączanie/wyłącznie diody LED
podłączonej do sterownika). Do komunikacji z użytkownikiem obie
aplikacje wykorzystują przeglądarkę internetową np. Internet Explorer.
Uruchomienie danej aplikacji wymaga załadowania do pamięci RAM
sterownika poprzez połączenie ftp komputera PC z sterownikiem, pliku

65
odpowiednio TINIWebSwitch.tini lub TINIWebServer.tini. Najpierw
pliki źródłowe muszą zostać skompilowane do czego wykorzystuje się
środowisko JDK Standard Edition 1.2.2 firmy Sun [22], które jest
instalowane na komputerze PC. Po skompilowaniu plików źródłowych
muszą one zostać poddane konwersji aby mogły być uruchamiane przez
JVM środowiska TINI, do czego służą aplikacje Java o nazwie
TINIConvertor lub BuildDependency znajdujące się w TINI SDK w
pliku tini.jar . Uruchamiane są one na komputerze PC korzystając z
wiersza poleceń. Przykład konwersji plików z rozszerzeniem .class na
pliki z rozszerzeniem .tini aplikacji TINIWebServer umieściłem poniżej:
C:\jdk1.2.2\bin>java –classpath h:\tini1.12\bin\tini.jar BuildDependency –f
h:\tini1.12\bin\WebWorker.class –f h:\tini1.12\bin\TemperatureWorker.class
-f h:\tini1.12\bin\TINIWebServer.class -o h:\tini1.12\bin\TINIWebServer.tini
-d h:\tini1.12\bin\tini.db –add OneWireContainer10 –x h:\tini1.12\bin\owapi_
dep.txt –p h:\tini1.12\bin\owapi_dependencies_TINI.jar –p h:\tini1.12\bin\
modules.jar –add HTTPSERVER
Ścieżka dostępu h:\tini1.12\bin wskazuje na oprogramowanie TINI SDK dla
systemu TINI .Poszczególne znaczniki oznaczają:
-f - wskazuje , które pliki muszą być skonwertowane (pliki z
rozszerzeniem .class),
-o - wskazuje miejsce umieszczenia pliku skonwertowanego (plik z
rozszerzeniem .tini),
-d - wskazuje miejsce utworzenia bazy danych dla systemu TINI,
-p -wskazuje miejsce klasy zależnej,
-x -wskazuje listę plików zależnych,
-add -dodaje bibliotekę,
Po wygenerowaniu pliku z rozszerzeniem .tini należy umieścić go w
pamięci sterownika, do czego wykorzystujemy połączenie ftp. Następnie
przy włączonym interpretatorze poleceń Slush uruchamiamy aplikację
TINIWebServer poprzez polecenie java TINIWebServer.tini .Możemy
teraz włączyć przeglądarkę i w pasku adresu wpisać adres internetowy
sterownika poprzez http:// 192. 168. 0. 2. przy prawidłowo skonfigurowanej
66
sieci lokalnej uruchamia się strona internetowa sterownika odczytująca
temperaturę czujnika w stopniach Fahrenheita oraz czas odczytujący z
układu RTC. Na rysunku 5.7 przedstawiłem widok uruchomionej strony .
Rys.5.7. Widok strony generowanej przez sterownik (aplikacja TINIWebServer)
Uruchomienie aplikacji TINIWebSwitch wymaga zainstalowania do
przeglądarki internetowej wirtualnej maszyny java JVM, ponieważ
aplikacja ta uruchamia Aplett Java na przeglądarce. Widok strony
przedstawiający aplikacje pozwalającą na włączanie i wyłączanie diody
LED jest przedstawiony na rysunku 5.8.

67
Rys.5.8. Widok strony generowanej przez sterownik (aplikacja
TINIWebSwitch)
6. Przeprowadzenie badań wyko-
nanego sterownika w warunkach
przyłączenia go do wybranych sieci
TCP/IP.
W szóstym punkcie pracy została dokonana analiza przepływu
danych sterownika podłączonego do sieci lokalnej przy pomocy programu
IRIS w wersji 4.06.

68
6.1. Analiza przepływu danych sterownika
podłączonego do sieci LAN przy wyko-
rzystaniu programu IRIS.
Sterownik został podłączony do innego komputera w sieci LAN, gdzie na
tym komputerze odbywało się włączanie i wyłączanie diody LED podłączonej do
sterownika. Uruchomiony program IRIS na komputerze pozwalał na odczyt
ruchu przepływu danych w sieci między komputerem a sterownikiem. Na
rysunku 6.1. przedstawiony jest widok programu IRIS z pokazanym ruchem
przepływu danych między komputerem a sterownikiem. Dla lepszego widoku
został wycięty i powiększony obszar z danymi programu, który jest
przedstawiony na rysunku 6.2.
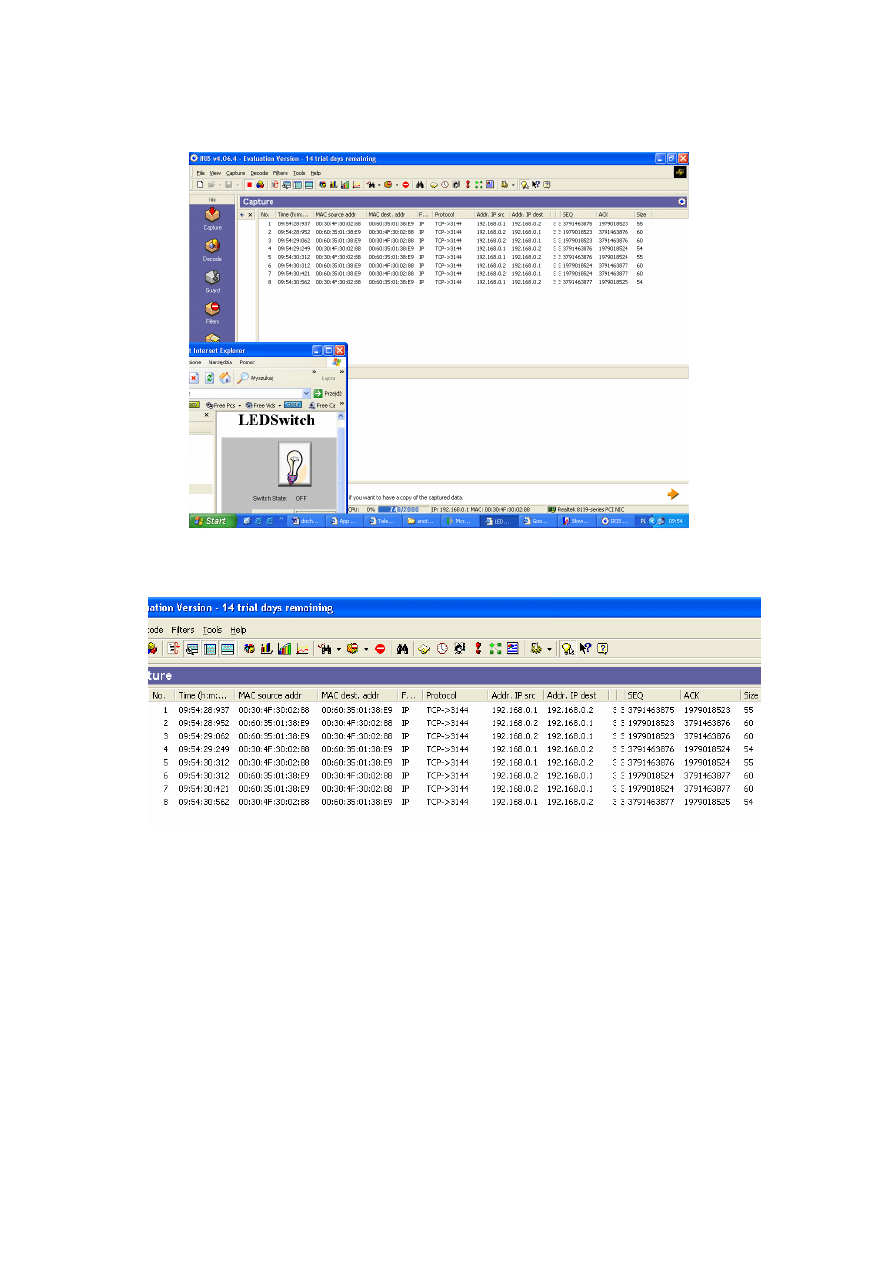
69
Rys.6.1. Widok programu IRIS z wyświetlonym przepływem danych w sieci między
komputerem a sterownikiem.
Rys.6.2. Widok programu IRIS z wyświetlonym przepływem danych w sieci między
komputerem a sterownikiem (powiększenie).
Konfiguracja sieciowa komputera i sterownika jest przedstawiona na
rysunku 6.3. Cztery pierwsze linie danych w programie IRIS przedstawiają
proces ruchu danych w sieci przy włączeniu diody LED zainicjowany przez
przeglądarkę internetową komputera. Cztery ostatnie linie pokazują proces ruchu
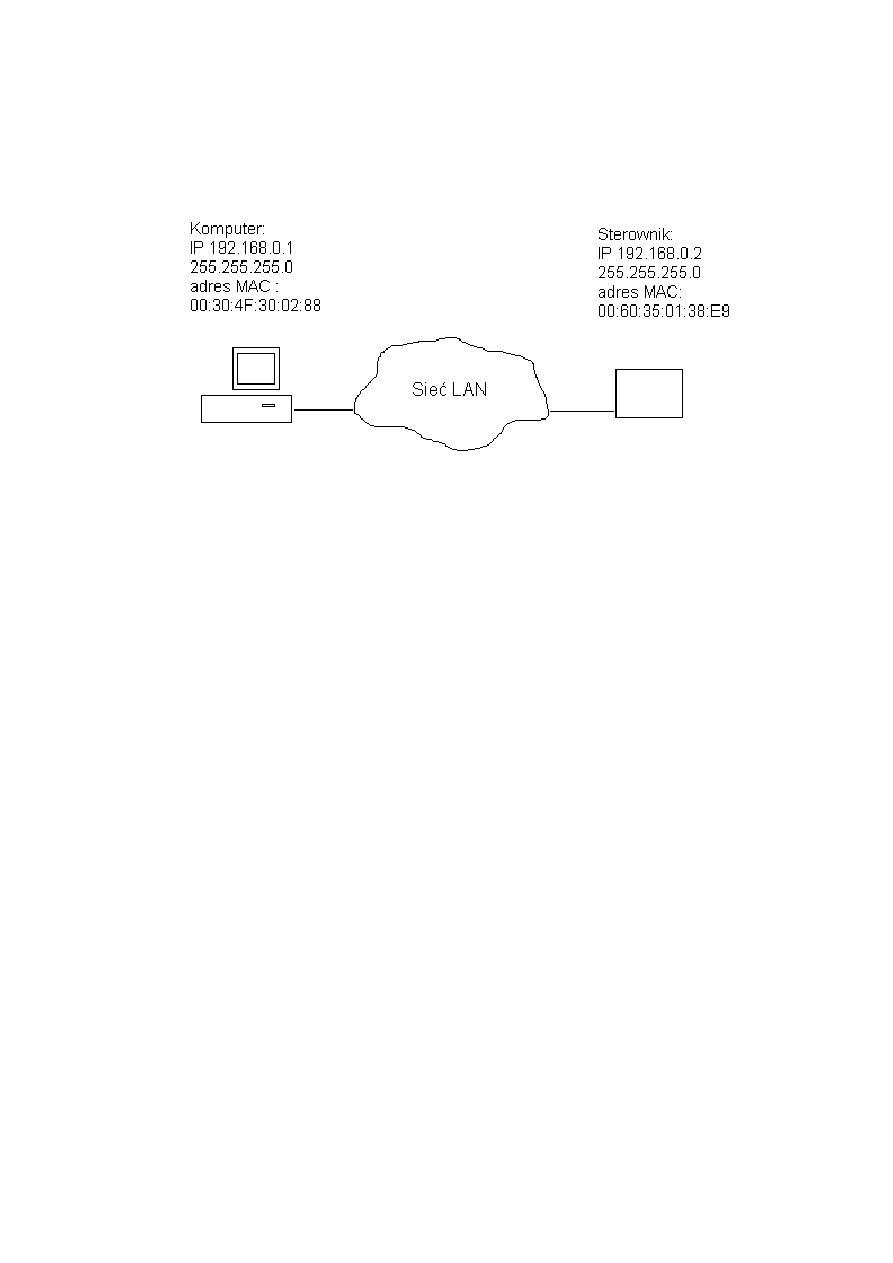
70
danych w sieci przy wyłączeniu diody LED zainicjowany przez przeglądarkę
komputera.
Rys. 6.3. Widok konfiguracji sieciowej komputera i sterownika w sieci LAN
Podsumowanie
Zaprojektowany sterownik do sterowania i kontroli urządzeń
poprzez sieć TCP/IP całkowicie spełnił swoje zadania. Bardzo duży obszar
możliwości współpracy z urządzeniami zewnętrznymi sprawia, że
sterownik jest doskonałym systemem do kontroli i sterowania urządzeń
rozproszonych praktycznie na całym świecie. W dobie wielkiej i
obciążonej sieci internetowej systemy te być może nie najlepiej się
sprawdzą przy kontrolowaniu czy też sterowaniu urządzeń wymagających
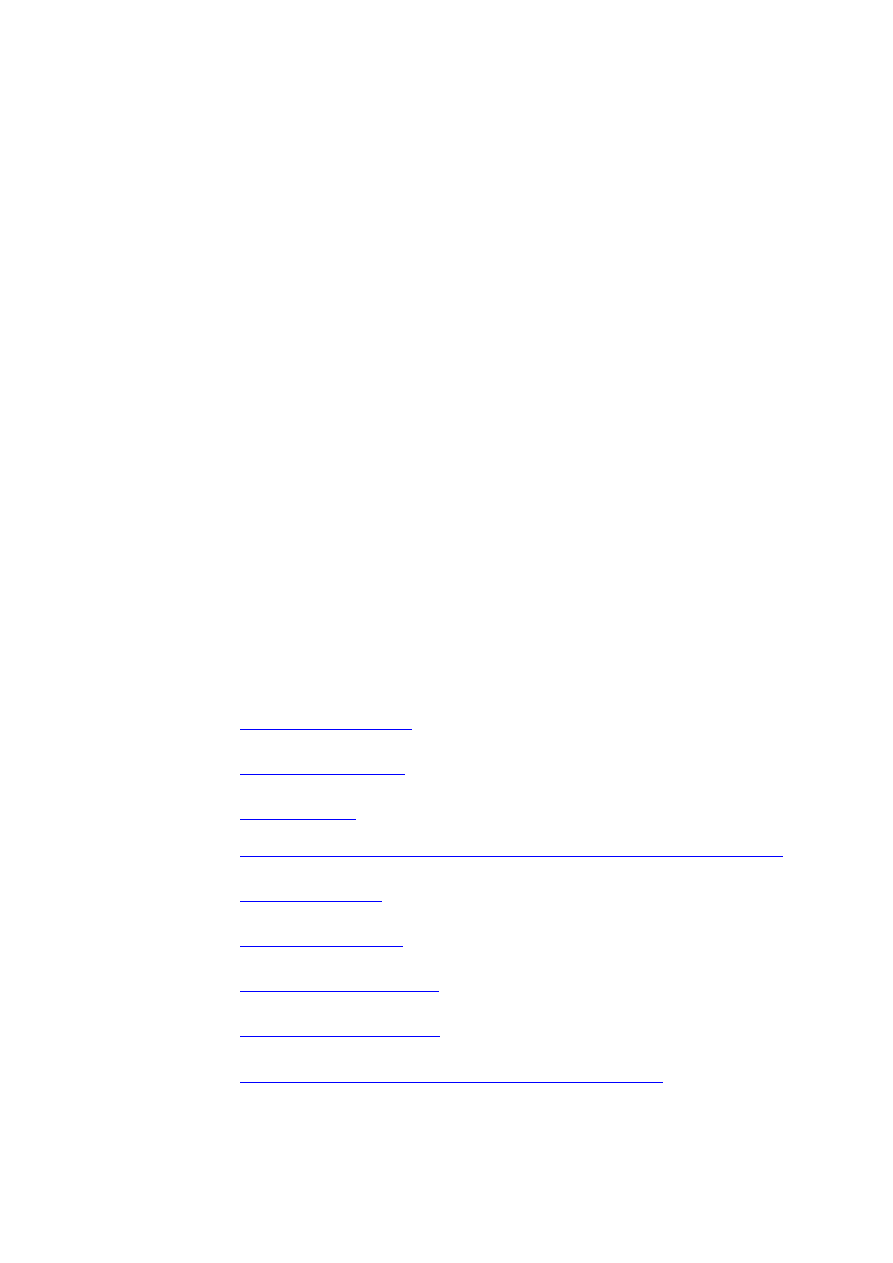
71
dużych przepustowości danych, jednak z pewnością systemy te poradzą z
urządzeniami wykorzystywanymi przez człowieka do powszechnego
użytku, które nie wymagają aż tak znacznej ilości danych do ich działania.
Literatura:
1.
www.maxim-ic.com
2.
www.I-buttom.com
3.
www.maxim-
ic.com/products/microcontrollers/pdf/DS80c390_user_guide.pdf
4.
www.pomiary.pl
5.
www.netica.com.pl
6.
www.test-therm.com.pl
7.
www.computerworld.pl
8.
http://pdfserv.maxim-ic.com/en/ds/DS80C400.pdf
72
9.
ftp://ftp.dalsemi.com/pub/tini
10.
ftp://ftp.dalsemi.com/pub
11.
http://www.maxim-ic.com/quick_view2.cfm/qv_pk/3748
12.
www.amd.com
13.
www.amic.com
14.
http://www.maxim-ic.com/quick_view2.cfm/qv_pk/2251
15.
www.realtek.com.tw
16.
http://www.maxim-ic.com/quick_view2.cfm/qv_pk/2750
17.
http://www.maxim-ic.com/quick_view2.cfm/qv_pk/1932
18.
http://www.maxim-ic.com/quick_view2.cfm/qv_pk/2355
19.
http://www.maxim-ic.com/quick_view2.cfm/qv_pk/1544
20.
http://www.maxim-ic.com/quick_view2.cfm/qv_pk/2815
21.
http://www.maxim-ic.com/quick_view2.cfm/qv_pk/2923
22.
www.sun.com
Wyszukiwarka
Podobne podstrony:
Prezentacja praca dyplom
Praca dyplomowa Strona tytułowa etc
PRACA DYPLOMOWA BHP - ORGANIZACJA PRACY W PSP, TEMATY PRAC DYPLOMOWYCH Z BHP
praca dyplomowa 1 strona wzor, Szkoła, prywatne, Podstawy informatyki
d druku BIBLIOGRAFI1, cykl VII artererapia, Karolina Sierka (praca dyplomowa; terapia pedagogiczna z
Praca dyplomowa(1)
streszczenie panelu, Prace dyplomowe i magisterskie, praca dyplomowa, materiały z internetu
praca dyplomowa BR5VQ5NYN263L77S7YKAVS66LCHECBHKF2E3GEQ
praca dyplomowa informatyka programowanie 7B5PTOE5KXERFXSEJISGCMFJDQ5X6LRRZEBNOJY
praca dyplomowa
Protokół TCP IP, R03 5
praca dyplomowa edycja wbn1 2011
PRACA DYPLOMOWA MAGISTERSKA OCZ SC TYPU LEMMNA
Protokol TCP IP R08 5 id 834124 Nieznany
Bardzo krótko o TCP IP adresacja w sieciach lokalnych
Protokół TCP IP, R12 5
Internet - UE prawo, Studia - IŚ - materiały, Semestr 07, Praca dyplomowa
do druku ROZDZIAŁ III, cykl VII artererapia, Karolina Sierka (praca dyplomowa; terapia pedagogiczna
więcej podobnych podstron