Teoria maszyn i mechanizmów Kinematyka mechanizmów. Metoda analityczna 1
Opracowali: J. Felis, H. Jaworowski
ANALIZA KINEMATYCZNA MECHANIZMÓW PŁASKICH
METODA ANALITYCZNA
Analiza kinematyczna mechanizmów dźwigniowych metodą wieloboku
wektorowego
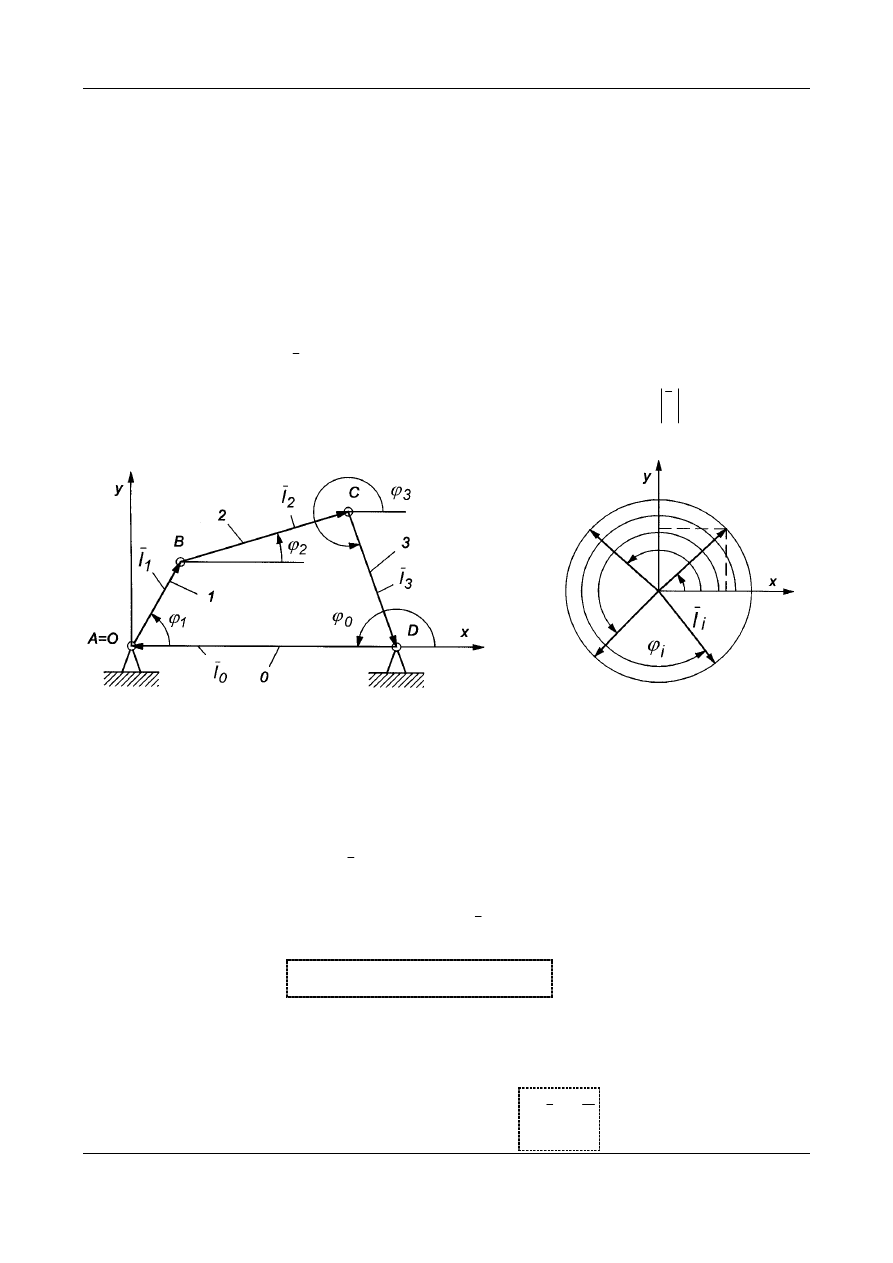
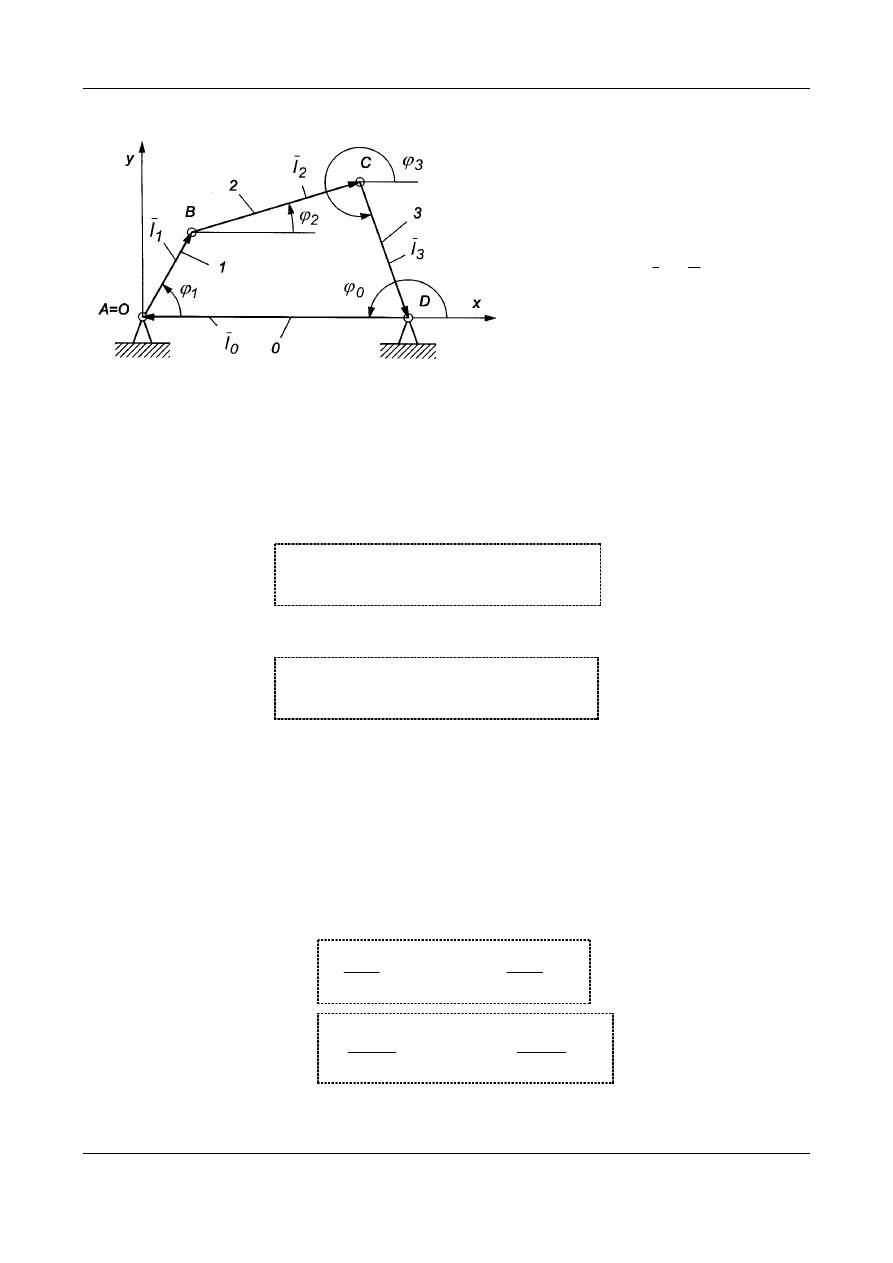
W opisywanej metodzie łańcuch kinematyczny dowolnego płaskiego
mechanizmu dźwigniowego przedstawia się w postaci zamkniętego
wieloboku wektorowego (Rys. 1), który określa chwilowe położenie
członów.
Każdy z wektorów
i
I
tego wieloboku zdefiniowany jest we współrzędnych
biegunowych przez dwa parametry: długość wektora
i
i
I
I
=
oraz kąt
i
ϕ
określający jego kierunek.
Rys. 1. Mechanizm dźwigniowy Rys. 2. Określanie kątów w metodzie
jako wielobok wektorowy wieloboku wektorowego
Dodatni kąt
i
ϕ
jest to taki kąt o jaki należy obrócić oś x układu
współrzędnych Oxy w kierunku przeciwnym do ruchu wskazówek zegara w
prawoskrętnym układzie współrzędnych aby jej dodatni zwrot pokrył się z
dodatnim zwrotem wektora
i
I co przedstawiono na Rys. 2.
Przy takiej umowie współrzędne wektora
)
I
,
I
(
I
iy
ix
i
wynoszą zawsze:
i
i
iy
i
i
ix
sin
I
I
,
cos
I
I
ϕ
ϕ
=
=
(1)
a znaki współrzędnych są określone poprzez znaki funkcji
ϕ
i
sin
i
ϕ
i
cos
.
Mechanizm płaski zdefiniowany jest przez zamknięty wielobok składający
się z n wektorów, co zapisujemy następująco:
0
I
n
1
i
i
=
∑
=
(2)
Teoria maszyn i mechanizmów Kinematyka mechanizmów. Metoda analityczna 2
Opracowali: J. Felis, H. Jaworowski
Wielobok wektorowy zbudowany na
członach mechanizmu posiada
2
⋅⋅⋅⋅
n parametrów.
(2)
Rys. 1. Mechanizm dźwigniowy jako wielobok wektorowy
Wielobok wektorowy opisany równaniem (2) po zrzutowaniu go na osie
płaskiego układu współrzędnych odpowiada dwóm równaniom skalarnym:
0
cos
l
,
0
l
i
n
1
i
i
n
1
i
ix
=
∑
⇒
=
∑
=
=
ϕ
(3)
0
sin
l
,
0
l
i
n
1
i
i
n
1
i
iy
=
∑
⇒
=
∑
=
=
ϕ
(4)
Ponieważ układ równań (3), (4) musi być oznaczony, na jego podstawie
można wyznaczyć dwa szukane parametry geometryczne np. dwie długo-
ści, długość i kąt lub dwa kąty. Pozostałe 2n - 2 parametry muszą być zatem
znane i należy je przyjąć jako dane w momencie definiowania mechanizmu.
Po zróżniczkowaniu równań (3), (4) względem czasu otrzymujemy układy
równań:
0
dt
dl
,
0
dt
dl
n
1
i
iy
n
1
i
ix
=
∑
=
∑
=
=
(5)
oraz
0
dt
l
d
,
0
dt
l
d
n
1
i
2
iy
2
n
1
i
2
ix
2
=
∑
=
∑
=
=
(6)
Z układu równań (5) wyznacza się dwie szukane prędkości liniowe lub kątowe
a na podstawie (6) dwa szukane przyspieszenia liniowe lub kątowe.
0
I
n
1
i
i
=
∑
=
Teoria maszyn i mechanizmów Kinematyka mechanizmów. Metoda analityczna 3
Opracowali: J. Felis, H. Jaworowski
Przy różniczkowaniu układu (5) względem czasu mogą zajść dwa przypadki:
a) długość danego członu jest stała
const
l
i
=
, wtedy
0
dt
dl
,
0
dt
dl
iy
ix
=
=
oraz
0
dt
l
d
,
0
dt
l
d
2
iy
2
2
ix
2
=
=
,
(7)
b) długość danego członu jest zmienna
const
l
i
≠
, wtedy
0
dt
dl
,
0
dt
dl
iy
ix
≠
≠
oraz
0
dt
l
d
,
0
dt
l
d
2
iy
2
2
ix
2
≠
≠
(8)
Dla prowadnic prostoliniowych wyrażenie dt
dl
i
określa prędkość linio-
wą skracania lub wydłużania się danego wektora reprezentującego człon.
Kierunek tej prędkości pokrywa się z kierunkiem członu.
Wyrażenie
2
i
2
dt
l
d
określa przyspieszenie liniowe wynikające ze skracania
lub wydłużania się danego wektora reprezentującego człon. W przypadku
członów prostoliniowych (prowadnic) przyspieszenie
2
i
2
dt
l
d
jest przyspiesze-
niem stycznym leżącym na linii danego członu a jego kierunek jest zgodny
z kierunkiem prędkości.
Zachodzą cztery możliwe przypadki zmian prędkości i przyspieszenia:
a)
0
dt
l
d
a
,
0
dt
dl
v
2
i
2
t
i
i
i
>
=
>
=
- wektor
i
l reprezentujący element zwięk-
sza swą długość i na tej podstawie określamy graficznie zwrot prędkości
końca tego wektora. Przyspieszenie styczne
t
i
a i prędkość
i
v
mają zwroty
zgodne,
b)
0
dt
l
d
a
,
0
dt
dl
v
2
i
2
t
i
i
i
<
=
<
=
- wektor
i
l reprezentujący element zmniej-
sza swą długość i na tej podstawie określamy graficznie zwrot prędkości
końca tego wektora. Przyspieszenie styczne
t
i
a i prędkość
i
v
mają zwroty
zgodne,
Teoria maszyn i mechanizmów Kinematyka mechanizmów. Metoda analityczna 4
Opracowali: J. Felis, H. Jaworowski
c)
0
dt
l
d
a
,
0
dt
dl
v
2
i
2
t
i
i
i
<
=
>
=
- wektor przyspieszenia stycznego
t
i
a ma
zwrot przeciwny do zwrotu wektora prędkości
i
v
. Element zwiększa dłu-
gość.
d)
0
dt
l
d
a
,
0
dt
dl
v
2
i
2
t
i
i
i
>
=
<
=
- wektor przyspieszenia stycznego
t
i
a ma
zwrot przeciwny do zwrotu wektora prędkości
i
v . Element zmniejsza dłu-
gość.
Powyższe rozważania mają również zastosowanie dla każdej współrzędnej
wektora
ix
l oraz
iy
l
.
Obliczając pochodne kątów
i
ϕ
względem czasu otrzymujemy odpowiednio:
dt
d
i
i
ϕ
ω =
- prędkość kątową wektora reprezentującego człon,
2
i
2
i
i
dt
d
dt
d
ϕ
ω
ε
=
=
- przyspieszenie kątowe wektora reprezentującego
człon.
Teoria maszyn i mechanizmów Kinematyka mechanizmów. Metoda analityczna 5
Opracowali: J. Felis, H. Jaworowski
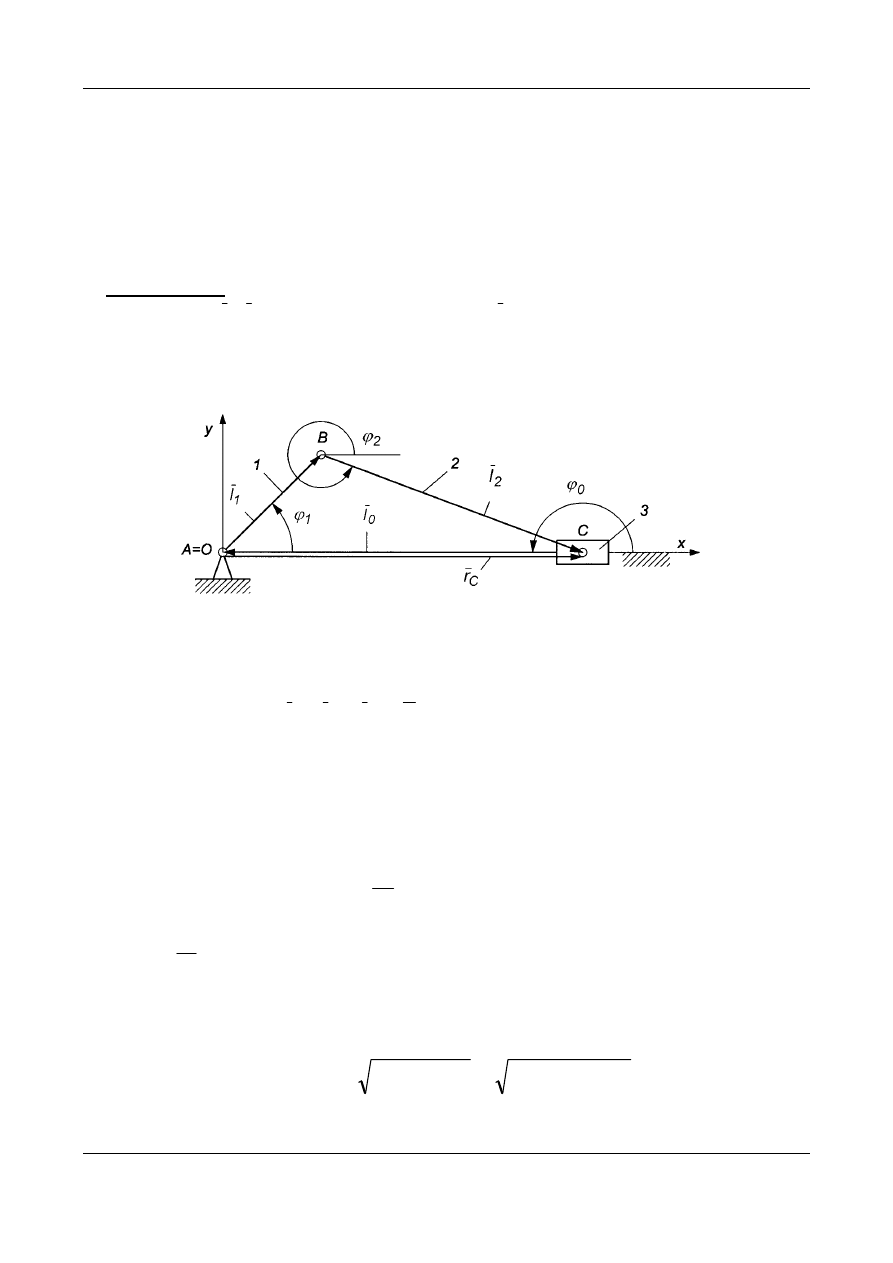
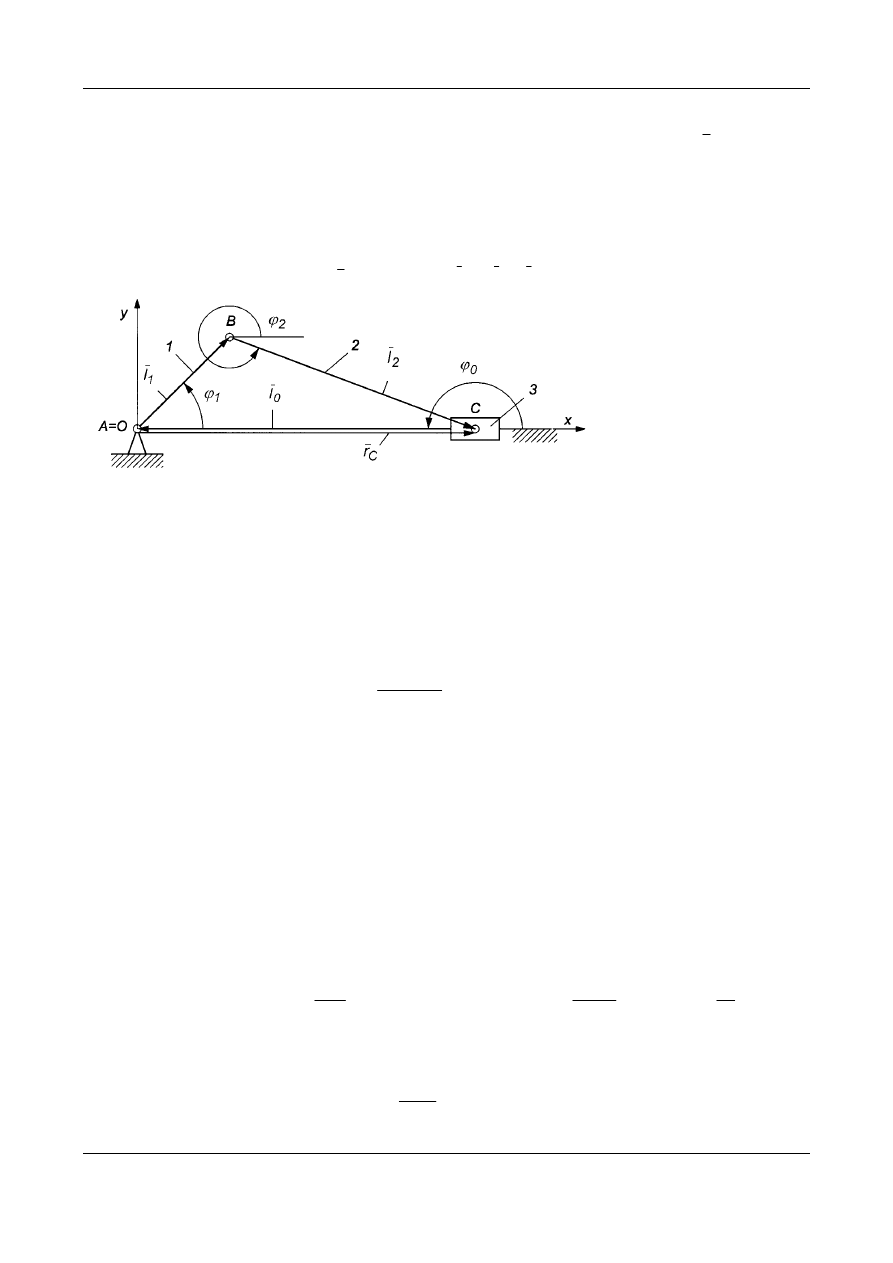
Przykład 1. Mechanizm korbowo-suwakowy
Mechanizm można zapisać trzema wektorami w sposób pokazany na Rys. 3. Należy
zatem przyjąć 2
⋅
3 – 2 = 4 parametry.
Dane:
π
ϕ
ϕ
ϕ
=
=
0
1
1
),
t
(
,
2
1
l
BC
,
l
AB
=
=
Szukane:
)
t
(
),
t
(
x
x
2
2
C
C
ϕ
ϕ =
=
,
)
t
(
),
t
(
v
v
2
2
C
C
ω
ω =
=
,
)
t
(
),
t
(
a
a
2
2
C
C
ε
ε =
=
Rozwiązanie
Dwa wektory
2
1
l
,
l
mają stałą długość. Wektor
0
l
zmienia swoją długość w czasie ru-
chu mechanizmu. Wpisujemy wielobok wektorowy w kontur mechanizmu i oznaczamy po-
łożenia kątowe poszczególnych wektorów względem osi Ox za pomocą kątów skierowa-
nych.
Rys. 3. Wielobok wektorowy mechanizmu korbowo-suwakowego
Opisujemy wielobok wektorowy równaniem wektorowym:
0
l
l
l
0
2
1
=
+
+
(P1.1)
Następnie piszemy odpowiednie równania skalarne:
0
l
cos
l
cos
l
0
2
2
1
1
=
−
+
ϕ
ϕ
(P1.2)
0
sin
l
sin
l
2
2
1
1
=
+
ϕ
ϕ
(P1.3)
Przyjmując oznaczenie mamy z (P1.3) mamy:
ϕ
λ
ϕ
ϕ
1
1
2
1
2
sin
sin
l
l
sin
−
=
−
=
(
P1.4)
i stąd
)
sin
sin(
arc
1
2
ϕ
λ
ϕ
−
=
(P1.5)
Dalej oznaczymy:
1
2
2
2
2
2
sin
1
sin
1
cos
A
ϕ
λ
ϕ
ϕ
−
=
−
=
=
(P1.6)
2
1
l
l
=
λ
Teoria maszyn i mechanizmów Kinematyka mechanizmów. Metoda analityczna 6
Opracowali: J. Felis, H. Jaworowski
W celu wyznaczenia prędkości liniowej oraz przyspieszenia liniowego punktu C ko-
nieczne jest wprowadzenie wektora promienia wodzącego tego punktu
C
r
.
Wektor promień wodzący dowolnego mechanizmu płaskiego lub prze-
strzennego prowadzony jest zawsze od początku układu współrzędnych do
danego punktu, którego prędkość lub przyspieszenie chcemy obliczyć.
2
1
0
C
C
l
l
l
)
0
,
x
(
r
+
=
−
=
(P1.7)
Rys. 3
Współrzędna wektora promienia wodzącego określająca położenie su-
waka wynosi:
A
l
cos
l
cos
l
cos
l
l
l
x
2
1
1
2
2
1
1
x
2
x
1
C
⋅
+
=
+
=
+
=
ϕ
ϕ
ϕ
P1.8)
W celu obliczenia prędkości kątowej różniczkujemy (P1.5) względem czasu:
1
1
1
2
1
1
2
2
1
1
2
2
cos
A
cos
cos
cos
cos
ϕ
ϕ
λ
ϕ
ϕ
ϕ
λ
ϕ
ω
ϕ
ϕ
λ
ϕ
ϕ
−
−
=
−
=
=
−
=
&
&
&
&
&
(
P1.9)
Następnie różniczkując (P1.8) względem czasu obliczymy prędkość liniową punktu C:
)
2
sin
A
5
,
0
(sin
l
x
v
1
1
1
1
1
C
C
ϕ
λ
ϕ
ϕ
−
+
−
=
=
&
&
(P1.10)
W celu obliczenia przyspieszenia kątowego różniczkujemy (P1.9) względem czasu:
(P1.11)
Następnie różniczkujemy (P1.10) i otrzymamy przyspieszenie liniowe punktu C:
P1.12)
+
+
−
+
−
=
=
1
1
2
3
3
1
2
1
1
1
1
1
1
C
C
2
cos
A
2
sin
A
4
cos
l
2
sin
A
2
sin
l
x
a
ϕ
λ
ϕ
λ
ϕ
ϕ
ϕ
λ
ϕ
ϕ
&
&&
&&
Jeżeli korba
1
I
AB
=
obraca się ze stałą prędkością kątową, wtedy jej przyspieszenie
kątowe jest równe zero czyli
0
dt
d
1
1
1
=
=
=
ω
ε
ϕ
&&
, co należy uwzględnić w równaniach.
Teoria maszyn i mechanizmów Kinematyka mechanizmów. Metoda analityczna 7
Opracowali: J. Felis, H. Jaworowski
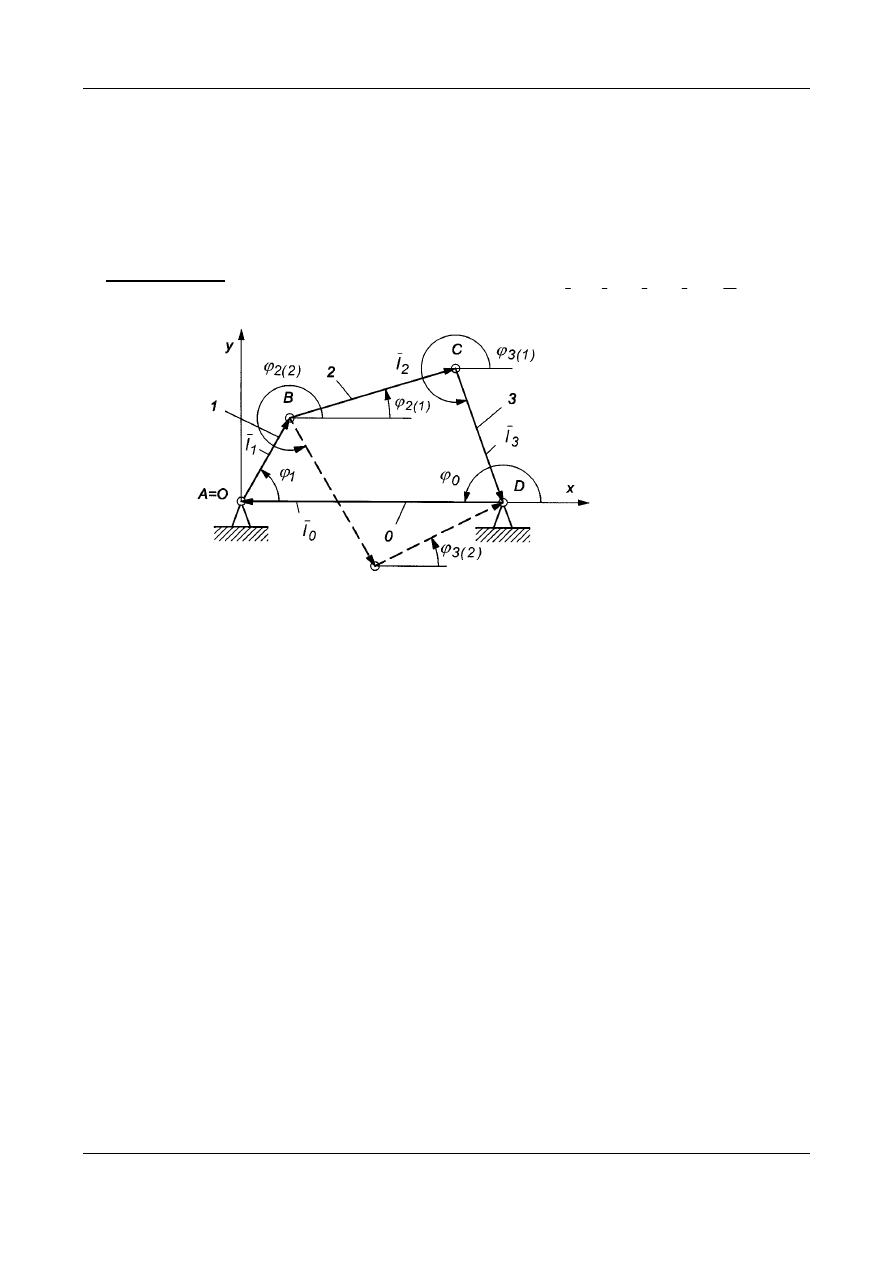
Przykład 2. Mechanizm czworoboku przegubowego
W ten mechanizm wpisujemy cztery wektory (Rys. 4). Należy zatem przyjąć 2
⋅
4 – 2 = 6
parametrów. Wszystkie wektory w przypadku tego mechanizmu mają stałą długość.
Dane:
π
ϕ
ϕ
=
0
0
3
2
1
1
,
l
,
l
,
l
,
l
,
Szukane:
3
2
3
2
3
2
,
,
,
,
,
ε
ε
ω
ω
ϕ
ϕ
.
Rozwiązanie
Mechanizm zapisujemy wielobokiem wektorowym:
0
l
l
l
l
0
3
2
1
=
+
+
+
(P2.1)
Rys. 4. Wielobok wektorowy mechanizmu czworoboku przegubowego
Po rzutowaniu równania (P2.1) na osie układu współrzędnych otrzymamy:
0
sin
l
sin
l
sin
l
0
l
cos
l
cos
l
cos
l
3
3
2
2
1
1
0
3
3
2
2
1
1
=
+
+
=
−
+
+
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
(P2.2)
Przekształcamy układ równań (P2.2) do postaci:
3
3
2
2
1
1
3
3
0
2
2
1
1
sin
l
sin
l
sin
l
cos
l
l
cos
l
cos
l
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
−
=
+
−
=
−
+
(P2.3)
Po wprowadzeniu oznaczeń:
,
sin
l
B
,
l
cos
l
A
1
1
0
1
1
ϕ
ϕ
=
−
=
otrzymamy:
3
3
2
2
3
3
2
2
sin
l
sin
l
B
cos
l
cos
l
A
ϕ
ϕ
ϕ
ϕ
−
=
+
−
=
+
(P2.4)
Równania (P2.4) podnosimy do kwadratu i dodajemy stronami
0
l
l
sin
Bl
2
B
cos
Al
2
A
2
3
2
2
2
2
2
2
2
2
=
−
+
+
+
+
ϕ
ϕ
(P2.5)
Równanie (P2.5) dzielimy przez
2
Al
2
Teoria maszyn i mechanizmów Kinematyka mechanizmów. Metoda analityczna 8
Opracowali: J. Felis, H. Jaworowski
0
sin
A
B
cos
Al
2
l
l
B
A
2
2
2
2
3
2
2
2
2
=
+
+
−
+
+
ϕ
ϕ
(P2.6)
Przyjmiemy oznaczenia:
2
2
3
2
2
2
2
Al
2
l
l
B
A
C
−
+
+
=
,
A
B
D
=
, zatem (P2.6) przyjmie
postać:
0
sin
D
cos
C
2
2
=
+
+
ϕ
ϕ
(P2.7)
Po podniesieniu (P2.6) stronami do kwadratu otrzymujemy:
0
)
D
C
(
cos
C
2
cos
)
D
1
(
2
2
2
2
2
2
=
−
+
+
+
ϕ
ϕ
(P2.8)
Po podstawieniu
2
cos
w
ϕ
=
otrzymamy równanie kwadratowe w postaci:
0
)
D
C
(
Cw
2
w
)
D
1
(
2
2
2
2
=
−
+
+
+
(P2.9)
z którego wyznaczymy dwa pierwiastki
,
w
,
w
2
1
a następnie dwie wartości
kąta
2
ϕ
, tj. kąty
)
2
(
2
)
1
(
2
,
ϕ
ϕ
.
Dwa rozwiązania równania kwadratowego (P2.9) odpowiadają dwóm wa-
riantom położenia członów mechanizmu czworoboku przegubowego przy
ustalonym położeniu członu napędzającego
1
ϕ
co pokazano na Rys. 4. Kąt
3
ϕ
znajdziemy z równania (P2.4). Otrzymamy odpowiednio:
)
2
(
3
)
1
(
3
,
ϕ
ϕ
.
W celu wyznaczenia prędkości kątowej członów 2 i 3 różniczkujemy pierw-
sze z równań (P2.2) i otrzymujemy:
0
sin
l
sin
l
sin
l
3
3
3
2
2
2
1
1
1
=
+
+
ϕ
ω
ϕ
ω
ϕ
ω
(P2.10)
gdzie:
,
dt
d
,
dt
d
,
dt
d
3
3
2
2
1
1
ϕ
ω
ϕ
ω
ϕ
ω
=
=
=
- pochodne kątów,
W celu wyznaczenia prędkości kątowej
3
ω
obracamy układ współrzędnych
o kąt
2
ϕ
. Równanie (P2.10) przyjmie postać:
0
)
sin(
l
)
sin(
l
)
sin(
l
2
3
3
3
2
2
2
2
2
1
1
1
=
−
+
−
+
−
ϕ
ϕ
ω
ϕ
ϕ
ω
ϕ
ϕ
ω
(P2.11)
a ponieważ wyrażenie
0
)
sin(
l
2
2
2
2
=
−
ϕ
ϕ
ω
to otrzymamy:
)
sin(
l
)
sin(
l
2
3
3
2
1
1
1
3
ϕ
ϕ
ϕ
ϕ
ω
ω
−
−
−
=
(P2.12)

Teoria maszyn i mechanizmów Kinematyka mechanizmów. Metoda analityczna 9
Opracowali: J. Felis, H. Jaworowski
Analogicznie obracając układ współrzędnych o kąt
ϕ
3
mamy:
0
)
sin(
l
)
sin(
l
)
sin(
l
3
3
3
3
3
2
2
2
3
1
1
1
=
−
+
−
+
−
ϕ
ϕ
ω
ϕ
ϕ
ω
ϕ
ϕ
ω
(P2.13)
Ponieważ
0
)
sin(
3
3
=
−
ϕ
ϕ
to
prędkość kątowa członu 2:
1
3
2
2
3
1
1
2
)
sin(
l
)
sin(
l
ω
ϕ
ϕ
ϕ
ϕ
ω
⋅
−
−
−
=
(P2.14)
W celu obliczenia przyspieszeń kątowych różniczkujemy równanie (P2.10)
0
sin
l
cos
l
sin
l
cos
l
sin
l
cos
l
3
3
3
3
3
2
3
2
2
2
2
2
2
2
1
1
1
1
1
2
1
=
+
+
+
+
+
ϕ
ε
ϕ
ω
ϕ
ε
ϕ
ω
ϕ
ε
ϕ
ω
(P2.15)
Przyspieszenie kątowe członu 3 -
3
ε
otrzymamy obracając układ współrzęd-
nych o kąt
ϕ
2
)
sin(
l
)
cos(
l
l
)
sin(
l
)
cos(
l
2
3
3
2
3
3
2
3
2
2
2
2
1
1
1
2
1
1
2
1
3
ϕ
ϕ
ϕ
ϕ
ω
ω
ϕ
ϕ
ε
ϕ
ϕ
ω
ε
−
−
+
+
−
+
−
−
=
2.16)
Przyspieszenie kątowe członu 2 -
2
ε
otrzymamy obracając układ współrzęd-
nych o kąt
ϕ
3
)
sin(
l
l
)
cos(
l
)
sin(
l
)
cos(
l
3
2
2
3
2
3
3
2
2
2
2
3
1
1
1
3
1
1
2
1
2
ϕ
ϕ
ω
ϕ
ϕ
ω
ϕ
ϕ
ε
ϕ
ϕ
ω
ε
−
+
−
+
−
+
−
−
=
(P2.17)
Równania (P2.15), (P2.16) i (P2.17) ulegną uproszczeniu jeżeli prędkość ką-
towa
const
1
=
ω
, wówczas przyspieszenie
0
1
=
ε
.
Teoria maszyn i mechanizmów Kinematyka mechanizmów. Metoda analityczna 10
Opracowali: J. Felis, H. Jaworowski
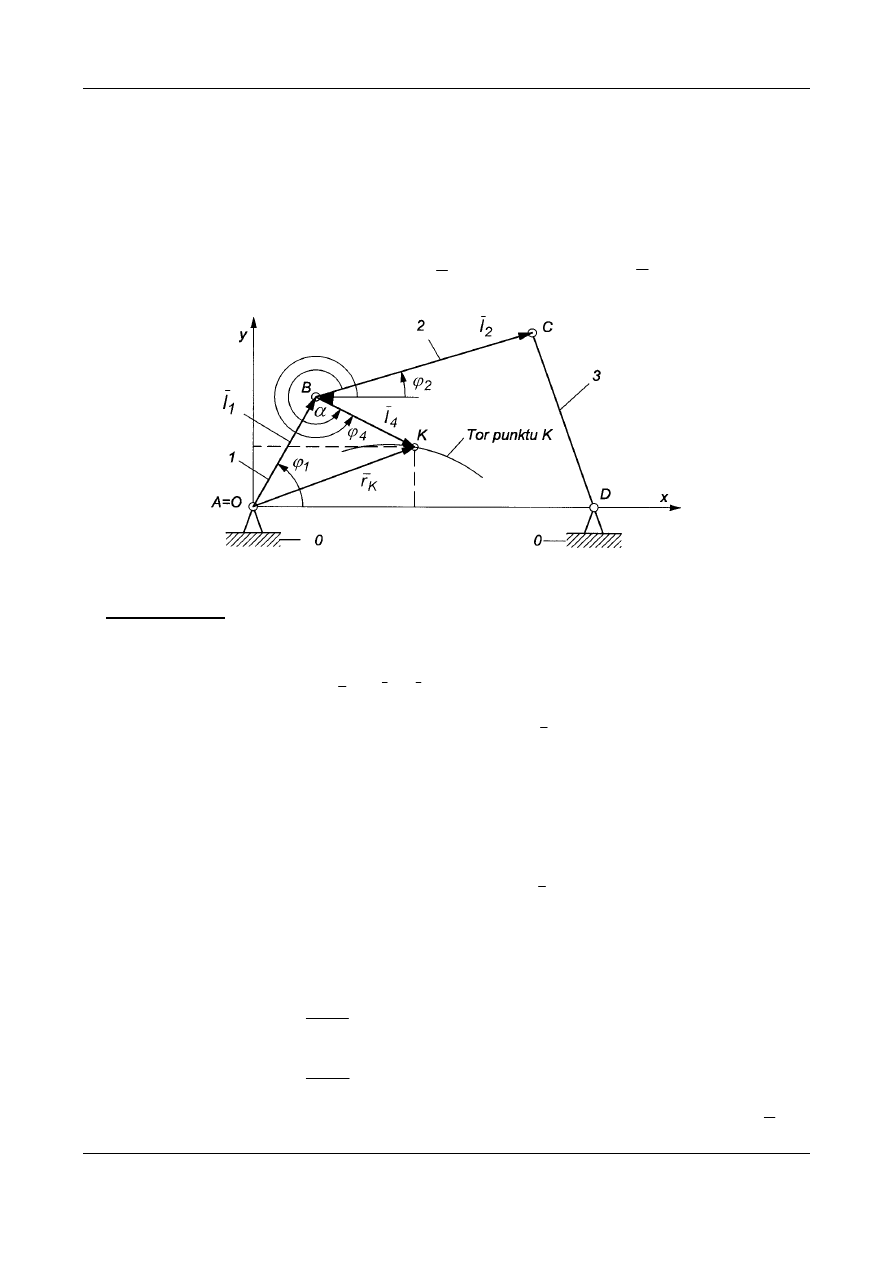
Przykład 3. Analiza toru, prędkości i przyspieszenia punktu płaszczy-
zny łącznikowej mechanizmu czworoboku przegubowego.
Dla mechanizmu czworoboku przegubowego wyznaczymy parametry kinematyczne
punktu K należącego do płaszczyzny łącznikowej (Rys. 5).
Dane:
2
4
2
4
2
4
4
1
1
,
,
,
l
),
t
(
,
l
ϕ
ϕ
ϕ
ϕ
α
ϕ
ϕ
ϕ
&&
&&
&
&
=
=
+
=
Szukane: tor punktu K, prędkość punktu
K
v
oraz przyspieszenie
K
a
.
Rys. 5. Czworobok przegubowy z oznaczonym punktem K płaszczyzny łącznikowej
Rozwiązanie
Na podstawie Rys. 5 zapiszemy równanie wektora promienia wodzącego
punktu K:
4
1
K
l
l
r
+
=
(P3.1)
Następnie wyznaczymy współrzędne wektora
K
r
.
)
sin(
l
sin
l
r
)
cos(
l
cos
l
r
2
4
1
1
Ky
2
4
1
1
Kx
α
ϕ
ϕ
α
ϕ
ϕ
+
+
=
+
+
=
(P3.2)
Zależności (P3.2) są parametrycznymi równaniami toru punktu K czyli równa-
niami hodografu wektora promienia wodzącego
K
r
Następnie różniczkujemy równania (P3.2) i znajdujemy współrzędne wektora
prędkości punktu K.
)
cos(
l
cos
l
dt
dr
v
)
sin(
l
sin
l
dt
dr
v
2
2
4
1
1
1
Ky
Kx
2
2
4
1
1
1
Kx
Kx
α
ϕ
ω
ϕ
ω
α
ϕ
ω
ϕ
ω
+
+
=
=
+
−
−
=
=
(P3.3)
Zależności (P3.3) są parametrycznymi równaniami hodografu prędkości
K
v .
Teoria maszyn i mechanizmów Kinematyka mechanizmów. Metoda analityczna 11
Opracowali: J. Felis, H. Jaworowski
Wartość wektora prędkości punktu K określimy z zależności
2
Ky
2
Kx
K
v
v
v
+
=
(P3.4)
Cosinusy kierunkowe jaki tworzy wektor
K
v z osiami układu współrzęd-
nych określają zależności:
K
Kx
K
v
v
)
x
,
v
cos(
=
,
K
Ky
K
v
v
)
y
,
v
cos(
=
(P3.5)
Analogicznie wyznaczymy współrzędne wektora przyspieszenia
K
a
)
sin(
l
)
cos(
l
sin
l
cos
l
dt
dr
a
)
cos(
l
)
sin(
l
cos
l
sin
l
dt
dr
a
2
2
2
4
2
2
4
1
2
1
1
1
1
1
2
2
Ky
Kx
2
2
2
4
2
2
4
1
2
2
1
1
1
1
2
2
Kx
Kx
α
ϕ
ω
α
ϕ
ε
ϕ
ω
ϕ
ε
α
ϕ
ω
α
ϕ
ε
ϕ
ω
ϕ
ε
+
−
+
+
−
=
=
+
−
+
−
−
−
=
=
(P3.6)
Zależność (P3.6) przestawiają parametryczne równania hodografu przy-
spieszenia. Wartość całkowitego przyspieszenia punku K wynosi:
2
Ky
2
Kx
K
a
a
a
+
=
(P3.7)
a jego cosinusy kierunkowe
K
Kx
K
a
a
)
x
,
a
cos(
=
,
K
Ky
K
a
a
)
y
,
a
cos(
=
(P3.8)
Teoria maszyn i mechanizmów Kinematyka mechanizmów. Metoda analityczna 12
Opracowali: J. Felis, H. Jaworowski
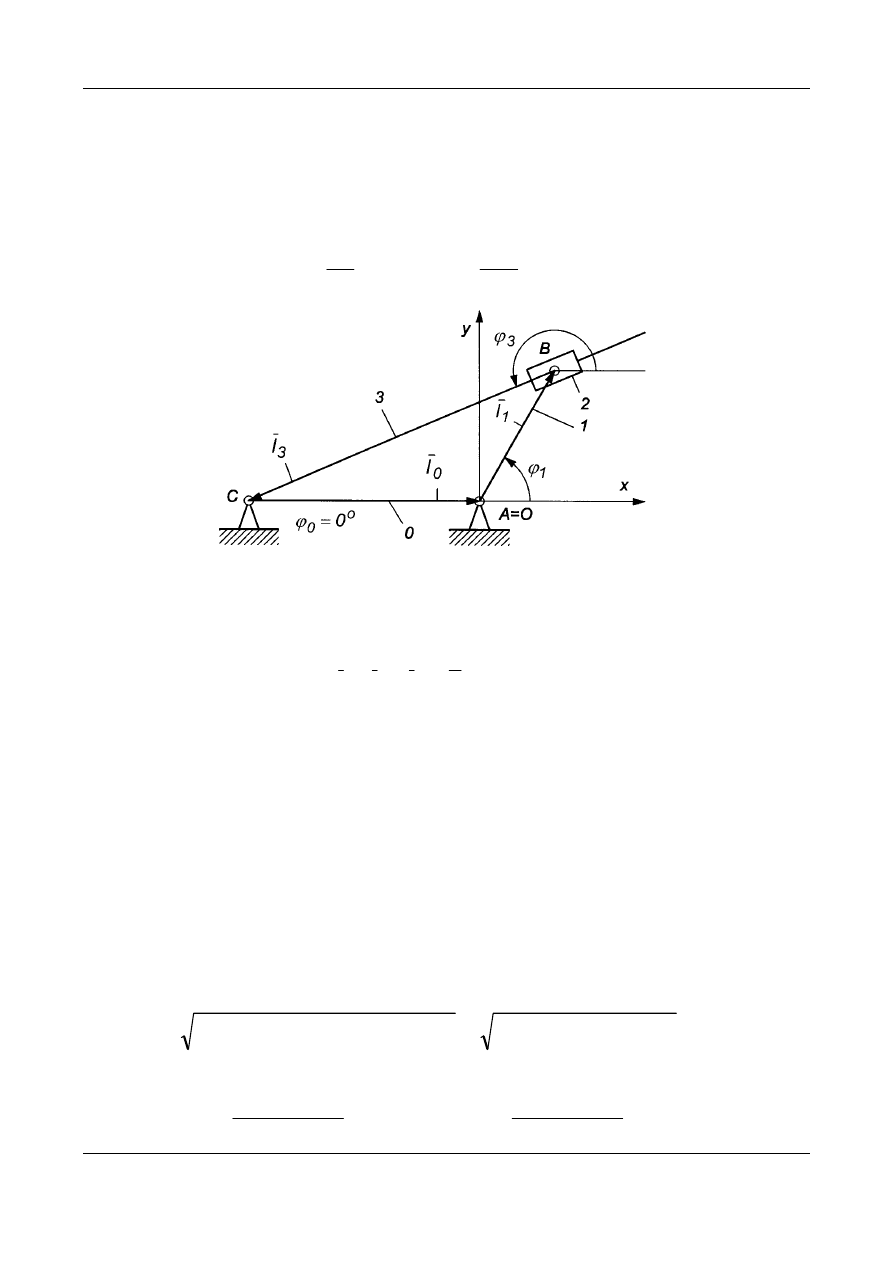
Przykład 4. Mechanizm jarzmowy
Mechanizm jarzmowy przedstawiony na Rys. 6 podobnie jak mechanizm korbowo-
suwakowy można zapisać za pomocą wieloboku trzech wektorów. Należy zatem założyć
2
⋅
3 - 2 = 4 parametry mechanizmu. Jedynym członem o zmiennej długości jest jarzmo 3.
Dane:
0
,
CA
l
),
t
(
,
AB
l
0
0
1
1
1
=
=
=
=
ϕ
ϕ
ϕ
Szukane:
3
l
,
3
ϕ
,
dt
dl
v
3
3
B
2
B
=
,
3
ω
,
2
3
2
t
3
B
2
B
dt
l
d
a
=
,
3
ε
Rys. 6. Wielobok wektorowy mechanizmu jarzmowego
Wpisujemy w analizowany mechanizm zamknięty trójkąt wektorów i zapisu-
jemy go równaniem:
0
l
l
l
0
3
1
=
+
+
(P4.1)
Po zrzutowaniu na osie układu współrzędnych otrzymamy równania ska-
larne:
0
sin
l
sin
l
0
l
cos
l
cos
l
3
3
1
1
0
3
3
1
1
=
+
=
+
+
ϕ
ϕ
ϕ
ϕ
(P4.2)
Z układu równań (P4.2) wyznaczymy długość jarzma
3
l
:
ϕ
ϕ
ϕ
ϕ
1
1
3
3
1
1
0
3
3
sin
l
sin
l
cos
l
l
cos
l
−
=
−
−
=
(P4.3)
Po podniesieniu układu równań (P4.3) do kwadratu i dodaniu stronami znaj-
dziemy długość jarzma
3
l
:
2
1
1
1
0
2
0
2
1
1
2
1
1
0
3
I
cos
l
l
2
I
)
sin
l
(
)
cos
l
l
(
l
+
+
=
+
+
=
ϕ
ϕ
ϕ
(P4.4)
Dzieląc stronami równania (P4.3) mamy:
1
1
0
1
1
3
1
1
0
1
1
3
cos
l
l
sin
l
tg
arc
,
cos
l
l
sin
l
tg
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
+
=
+
=
(P4.5)

Teoria maszyn i mechanizmów Kinematyka mechanizmów. Metoda analityczna 13
Opracowali: J. Felis, H. Jaworowski
W celu znalezienia prędkości kątowych i liniowych jarzma 3 różniczkujemy
pierwsze z równań (P4.2) tj. równanie:
0
l
cos
l
cos
l
0
3
3
1
1
=
+
+
ϕ
ϕ
podstawiając
1
1
ϕ
ω
&
=
i
3
3
ϕ
ω
&
=
:
0
sin
l
cos
dt
dl
sin
l
3
3
3
3
3
1
1
1
=
−
+
−
ϕ
ω
ϕ
ϕ
ω
(P4.6)
Prędkość względną suwaka 2 względem prowadnicy 3 tj.
dt
dl
v
3
3
B
2
B
=
znajdziemy obracając układ współrzędnych Oxy o kąt
ϕ
3
,
0
)
sin(
l
)
cos(
dt
dl
)
sin(
l
3
3
3
3
3
3
3
3
1
1
1
=
−
−
−
+
−
−
ϕ
ϕ
ω
ϕ
ϕ
ϕ
ϕ
ω
(P4.7)
Ostatecznie prędkość względna suwaka 2 względem prowadnicy 3 :
)
sin(
l
dt
dl
v
3
1
1
1
3
3
B
2
B
ϕ
ϕ
ω
−
=
=
(P4.8)
Prędkość kątową jarzma
3
ω
znajdziemy obracając układ współrzędnych
o kąt (
o
90
3
−
ϕ
). Z równania:
0
)
90
sin(
l
)
90
(
cos
dt
dl
)
90
sin(
l
o
3
3
3
3
o
3
3
3
3
1
1
1
=
+
−
−
+
+
−
+
+
−
−
ϕ
ϕ
ω
ϕ
ϕ
ϕ
ϕ
ω
o
(P4.9)
Ostatecznie prędkość kątowa jarzma:
)
cos(
l
l
3
1
1
3
1
3
ϕ
ϕ
ω
ω
−
−
=
(P4.10)
W celu znalezienia przyspieszeń kątowych i liniowych różniczkujemy rów-
nanie (P4.6) podstawiając
3
3
1
1
,
ε
ϕ
ε
ϕ
=
=
&&
&&
:
(P4.11)
0
cos
l
sin
l
sin
dt
dl
2
cos
dt
l
d
cos
l
sin
l
3
2
3
3
3
3
3
3
3
3
3
2
3
2
1
2
1
1
1
1
1
=
−
−
−
+
−
−
ϕ
ω
ϕ
ε
ϕ
ω
ϕ
ϕ
ω
ϕ
ε
Przyspieszenie styczne suwaka 2 względem prowadnicy 3 tj.
2
3
2
t
3
B
2
B
dt
l
d
a
=
znajdziemy obracając układ współrzędnych o kąt
3
ϕ
:
0
l
dt
l
d
)
cos(
l
)
sin(
l
2
3
3
2
3
2
3
1
2
1
1
3
1
1
1
=
−
+
−
−
−
−
ω
ϕ
ϕ
ω
ϕ
ϕ
ε
(P4.12)
ostatecznie:
2
3
3
3
1
2
1
1
3
1
1
1
2
3
2
t
3
B
2
B
l
)
cos(
l
)
sin(
l
dt
l
d
a
ω
ϕ
ϕ
ω
ϕ
ϕ
ε
+
−
+
−
=
=
(P4.13)
Teoria maszyn i mechanizmów Kinematyka mechanizmów. Metoda analityczna 14
Opracowali: J. Felis, H. Jaworowski
Obracając układ współrzędnych o kąt (
o
90
3
−
ϕ
): otrzymamy przyspieszenie
kątowe jarzma:
0
)
90
cos(
l
)
90
sin(
l
)
90
sin(
dt
dl
2
)
90
cos(
dt
l
d
)
90
cos(
l
)
90
sin(
l
3
3
2
3
3
3
3
3
3
3
3
3
3
3
3
2
3
2
3
1
2
1
1
3
1
1
1
=
+
−
−
+
−
−
+
+
−
−
+
−
+
+
+
−
−
+
−
−
o
o
o
o
o
o
ϕ
ϕ
ω
ϕ
ϕ
ε
ϕ
ϕ
ω
ϕ
ϕ
ϕ
ϕ
ω
ϕ
ϕ
ε
(P4.14)
ostatecznie:
3
3
3
3
1
2
1
3
1
3
1
1
3
1
3
l
dt
dl
2
)
sin(
l
l
)
cos(
l
l
ω
ϕ
ϕ
ω
ϕ
ϕ
ε
ε
−
−
+
−
−
=
(P4.15)
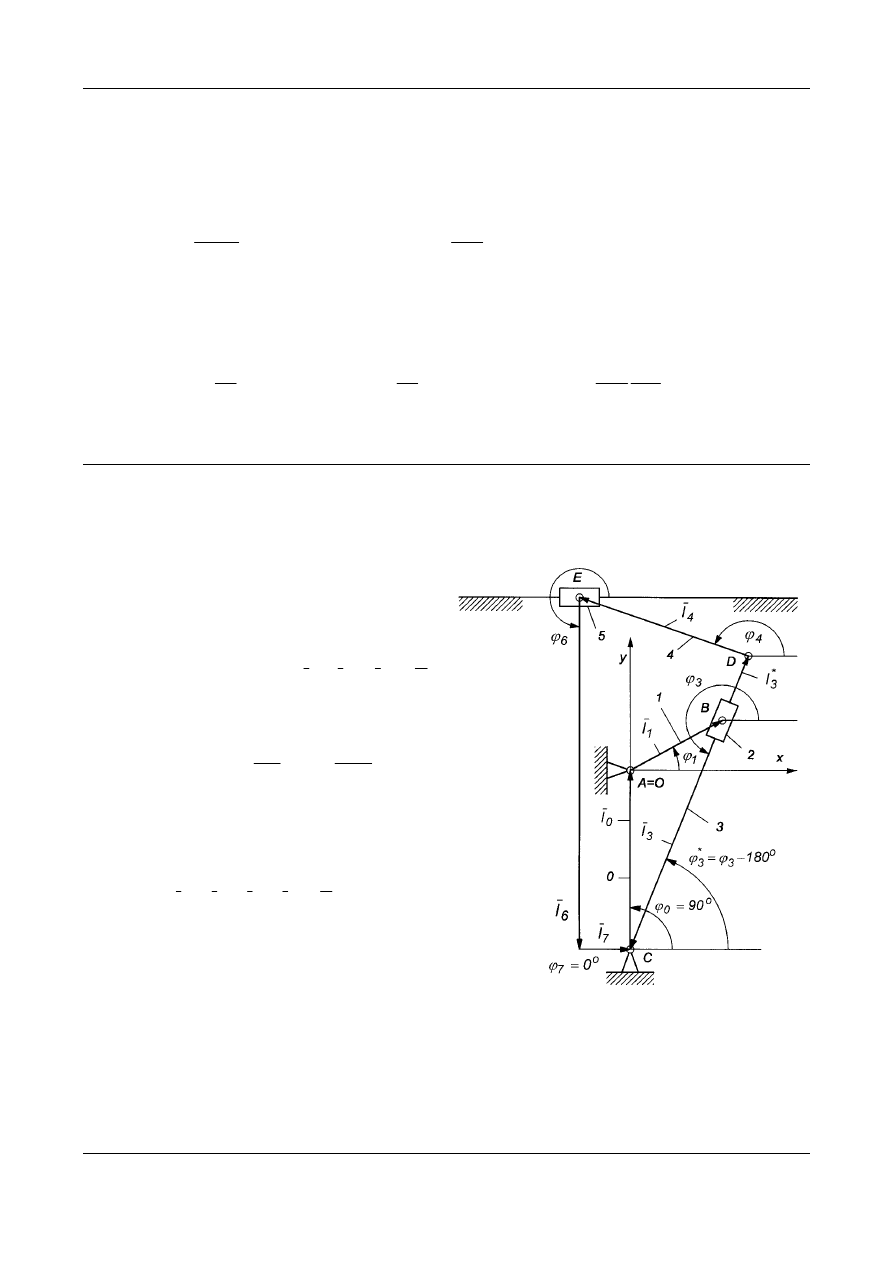
Przykład 5. Mechanizm złożony
Analiza kinematyczna mechanizmu złożonego zostanie pokazana na przykładzie me-
chanizmu napędu stołu strugarki przedstawionego w postaci schematu na Rys. 7.
Zadanie można rozwiązać w dwóch etapach:
Etap – 1. Analiza mechanizmu jarzmowego opisanego
wielobokiem wektorowym:
0
l
l
l
0
3
1
=
+
+
P5.1
()
Dane:
,
90
,
l
),
t
(
,
l
o
0
0
1
1
=
ϕ
ϕ
Szukane:
3
l ,
3
ϕ
,
dt
dl
3
,
3
ω
,
2
3
2
dt
l
d
,
3
ε
Etap – 2. Analiza mechanizmu korbowo-suwakowego
opisanego wielobokiem wektorowym:
0
l
l
l
l
7
6
4
*
3
=
+
+
+
(P5.2)
Dane:
o
o
o
0
,
270
,
l
,
l
,
180
,
l
7
6
6
4
3
*
3
*
3
=
=
−
=
ϕ
ϕ
ϕ
ϕ
Szukane:
7
4
7
4
7
4
l
,
,
l
,
,
l
,
&&
&&
&
&
ϕ
ϕ
ϕ
Rys. 7. Wielobok wektorowy
mechanizmu złożonego
Ponieważ przykłady analizy kinematycznej mechanizmu jarzmowego jak również
korbowo-suwakowego zostały pokazane już w niniejszym rozdziale należy je wykorzy-
stać i zastosować w rozważanym przypadku mechanizmu złożonego.
Wyszukiwarka
Podobne podstrony:
Metoda PEST id 294420 Nieznany
Metoda Eurela id 294267 Nieznany
metoda grupowa id 294297 Nieznany
metoda sil 2 id 294543 Nieznany
METODA FIBERGLASS id 294273 Nieznany
Mechanika analityczna id 290740 Nieznany
metoda Rockwella id 294505 Nieznany
metoda ibad id 294307 Nieznany
metoda aktywna id 294176 Nieznany
Metoda projektowa id 294456 Nieznany
METODA OWAS 5 id 294405 Nieznany
BO2 metoda geometryczna id 9105 Nieznany
Metoda PEST id 294420 Nieznany
Metoda Eurela id 294267 Nieznany
metoda grupowa id 294297 Nieznany
analityczna test id 59602 Nieznany (2)
Anestezyna metoda 1 id 63594 Nieznany (2)
metoda rezonansowa EPR id 29449 Nieznany
8 metoda Newtona Raphsona id 47 Nieznany (2)
więcej podobnych podstron