Fizyka I
– egzamin
1.
Ruch krzywoliniowy (droga, prędkość, przyspieszenie).
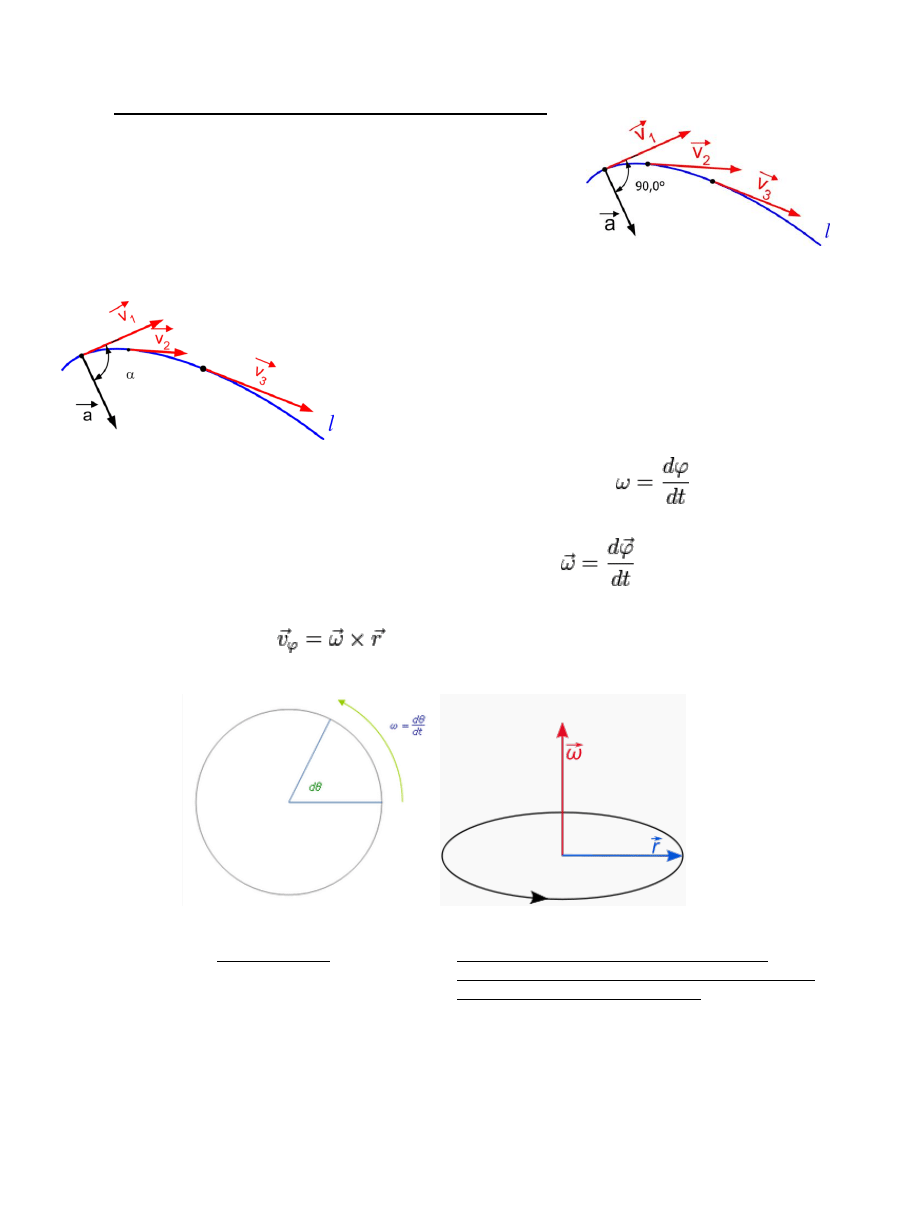
Ruch krzywoliniowy jednostajny: Jest to ruch punktu po torze
krzywoliniowym l, w którym wektor prędkości w każdej chwili jest styczny
do toru, a jego wartość nie zmienia się z czasem (zmienia się tylko jego
kierunek).
Ruch krzywoliniowy zmienny: Jest to ruch punktu po torze krzywoliniowym,
w którym wektor prędkości ruchomego punktu zmienia wartość i kierunek.
W ruchu krzywoliniowym zmiennym wektor przyspieszenia punktu tworzy
z wektorem prędkości tego punktu pewien kąt α (ostry lub rozwarty).
PREDKOŚĆ - W ruchach krzywoliniowych definiowana jest prędkość kątowa
gdzie φ jest kątem obrotu wokół pewnej osi ustalonej osi. Traktując φ jako kąt skierowany, można przypisać prędkości
kątowej kierunek osi obrotu i zwrot zgodny z regułą śruby prawoskrętnej
Tak zdefiniowana prędkość kątowa jest pseudowektorem. Pomiędzy prędkością kątową a prędkością transwersalną
zachodzi następujący związek
{kind=link}
{kind=link}
Prędkość kątowa
Prędkość kątowa jest wielkością wektorową ω,
której kierunek pokrywa się z osią obrotu, a zwrot jest
zgodny z regułą śruby prawoskrętnej
DROGA w fizyce to długość odcinka toru (krzywej lub prostej), jaką pokonuje ciało lub punkt materialny podczas
swojego ruchu. Droga nie oznacza odległości pomiędzy dwoma punktami wyznaczającymi początek i koniec ruchu.
Liczy się ją po torze ruchu, czyli po krzywej, po której porusza się ciało
.
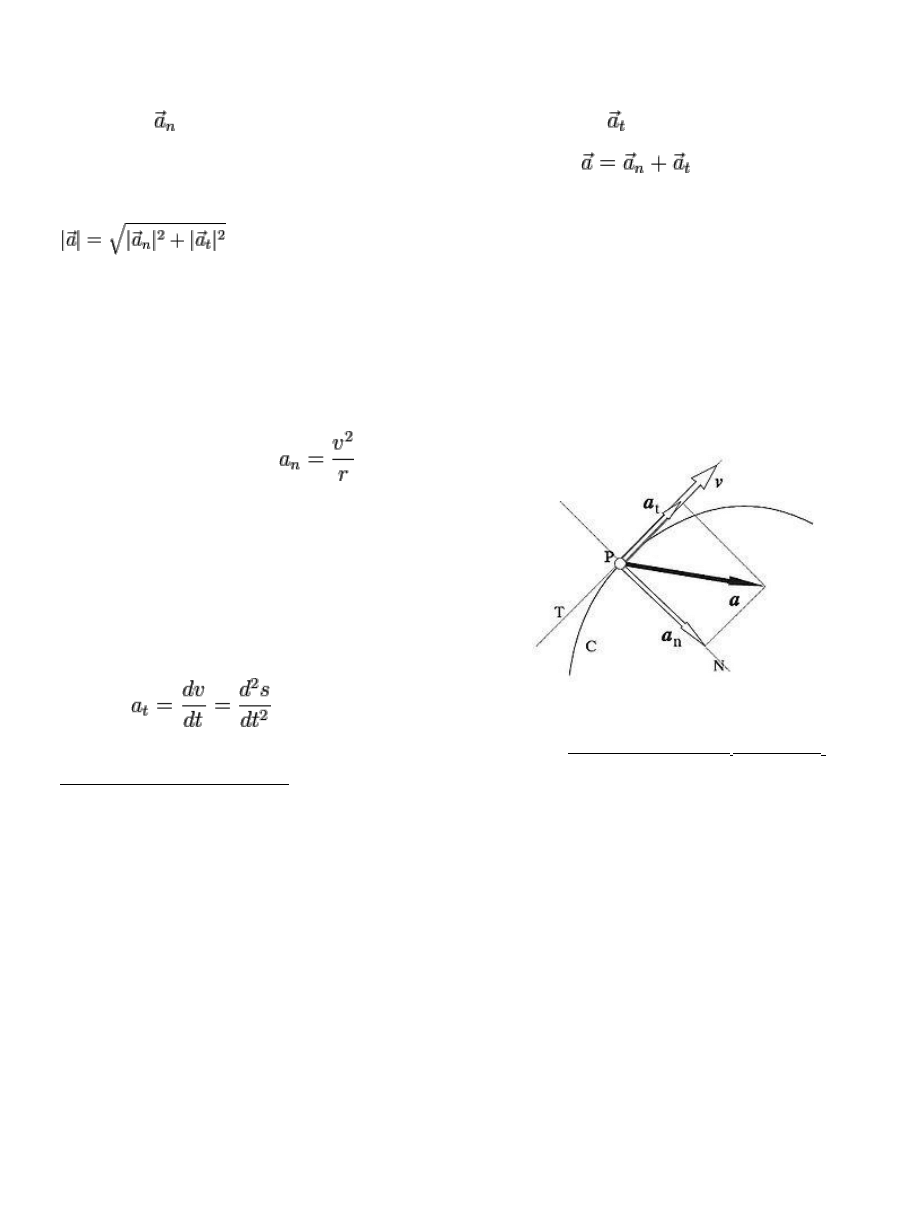
PRZYŚPIESZENIE: Jeżeli ciało porusza się po torze krzywoliniowym, wówczas całkowite przyspieszenie może być
rozłożone na dwie składowe: prostopadłą do toru ruchu zwaną przyspieszeniem dośrodkowym lub normalnym
(oznaczanym
) i składową równoległą zwaną przyspieszeniem stycznym (ozn.
).
Wektor przyspieszenia całkowitego jest sumą składowej normalnej i stycznej:
Składowe styczna i normalna są prostopadłe, dlatego wartość przyspieszenia całkowitego jest równa:
Przyspieszenie dośrodkowe (normalne)
Jest to składowa przyspieszenia prostopadła do toru ruchu. Reprezentuje tę część przyspieszenia, która wpływa na
zmianę kierunku prędkości, a zatem na kształt toru, ale nie wpływa na zmianę wartości prędkości. Jeżeli prędkość
chwilowa oznaczona jest jako v, a chwilowy promień zakrzywienia toru (promień okręgu stycznego do toru, czyli
promień krzywizny toru) ruchu wynosi r, to wartość a
n
przyspieszenia dośrodkowego ciała jest równa:
Przyspieszenie styczne
Jest to składowa przyspieszenia styczna do toru ruchu, powodująca
zmianę wartości prędkości, ale nie powodująca zmiany kierunku
ruchu. Stosując oznaczenie v dla wartości prędkości chwilowej i
oznaczenie s dla drogi pokonanej przez ciało, przyspieszenie
styczne a
t
określają wzory:
Przyspieszenie styczne a
t
i normalne a
n
2. Zasady dynamiki Newtona.
Zasady dynamiki Newtona – trzy zasady leżące u podstaw mechaniki klasycznej sformułowane przez Isaaca
Newtona i opublikowane wPhilosophiae Naturalis Principia Mathematica w 1687 roku. Zasady dynamiki określają
związki między ruchem ciała a siłami działającymi na nie, dlatego zwane są też prawami ruchu. W mechanice
kwantowej nie mają zastosowania, w mechanice relatywistycznej obowiązują w ograniczonym zakresie. Obecnie w
wersji popularnonaukowej (podręcznikowej) funkcjonuje kilka wersji tych praw.
I zasada dynamiki (zasada bezwładności)- W inercjalnym układzie odniesienia, jeśli na ciało nie działa żadna siła lub
siły działające równoważą się, to ciało pozostaje w spoczynku lub porusza się ruchem jednostajnym prostoliniowym.
Każde ciało trwa w swym stanie spoczynku lub ruchu prostoliniowego jednostajnego, jeżeli siły przyłożone nie
zmuszą ciała do zmiany tego stanu. O takim ruchu mówimy czasem jako o ruchu swobodnym.
Wybierzmy ciało spełniające założenia pierwszej zasady dynamiki i przypiszmy mu pewien układ odniesienia.
Każde ciało, na które też nie działa żadna siła będzie w tym układzie odniesienia również spoczywało lub poruszało się
po linii prostej ruchem jednostajnym. Każdemu takiemu ciału również można przypisać pewien nowy układ
odniesienia. Układy te będą względem siebie spoczywały lub poruszały się ruchem jednostajnym prostoliniowym.
Takie układy odniesienia nazywamy układami inercjalnymi.
Dlatego pierwsza zasada dynamiki jest traktowana jako postulat istnienia inercjalnego układu odniesienia i jest
formułowana: Istnieje układ odniesienia, w którym ciało nie podlegające oddziaływaniom zewnętrznym spoczywa lub
porusza się po prostej ze stałą prędkością.
Jeżeli istnieje jeden inercjalny układ odniesienia, to istnieje ich nieskończenie wiele. Układy inercjalne
spoczywają lub poruszają się względem siebie po linii prostej ze stałą prędkością.
Wyżej opisany sposób zamiany opisu ruchu z jednego układu odniesienia do innego w mechanice klasycznej
nazywany jest transformacją Galileusza.
Bezwładność ciał jest to zdolność ciał do przeciwstawiania się wszelkim zmianom ruchu. Miarą bezwładności
jest jego masa.
II zasada dynamiki- Jeśli siły działające na ciało nie równoważą się (czyli siła wypadkowa
jest różna od zera), to
ciało porusza się z przyspieszeniem wprost proporcjonalnym do siły wypadkowej, a odwrotnie proporcjonalnym do
masy ciała.
Współczynnik proporcjonalności jest równy odwrotności masy ciała:
Zmiana ruchu jest proporcjonalna do przyłożonej siły poruszającej i odbywa się w kierunku prostej, wzdłuż której siła
jest przyłożona.
W wersji zwanej uogólnioną (uogólniona druga zasada dynamiki), zasada ta obowiązuje również dla ciała o
zmiennej masie np. w mechanice relatywistycznej: Zmiana pędu ciała jest proporcjonalna do działającej siły
wypadkowej.
Przy prędkościach, w których nie występują efekty relatywistyczne czyli dla prędkości znacznie mniejszych od
prędkości światła, zasadę tę można wyrazić w wersji uproszczonej (ta wersja funkcjonuje na wstępnych etapach
nauczania fizyki i jest stosowana powszechnie do obliczeń): Przyspieszenie z jakim porusza się ciało jest
proporcjonalne do działającej siły, a odwrotność masy jest współczynnikiem proporcjonalności. Kierunek i zwrot
przyspieszenia jest zgodny z kierunkiem i zwrotem siły.
III zasada dynamiki (zasada akcji i reakcji)- Oddziaływania ciał są zawsze wzajemne. Siły wzajemnego
oddziaływania dwóch ciał mają takie same wartości, taki sam kierunek, przeciwne zwroty i różne punkty przyłożenia
(każda działa na inne ciało). Jeśli ciało A działa na ciało B siłą F (akcja), to ciało B działa na ciało A siłą (reakcja) o
takiej samej wartości i kierunku, lecz o przeciwnym zwrocie.
W wersji skróconej: Każdej akcji towarzyszy reakcja równa co do wartości i kierunku lecz przeciwnie
zwrócona. Lecz należy pamiętać, że siły się nie równoważą.
Względem każdego działania istnieje przeciwdziałanie zwrócone przeciwnie i równe, to jest wzajemne działania
dwóch ciał są zawsze równe i zwrócone przeciwnie.
III Zasada dynamiki, słuszna tylko w mechanice nierelatywistycznej, zwana jest zasadą akcji i reakcji. Zasada ta
zakłada, że oddziaływania rozchodzą się w przestrzeni z nieskończoną prędkością. Doświadczenia wskazują, że
wszystkie oddziaływania rozchodzą się ze skończoną prędkością nieprzewyższającą prędkości światła.
W zasadach dynamiki ciało oznacza punkt materialny, ruch dotyczy ruchu względem układu
odniesienia będącego układem inercjalnym. Zasady dynamiki można również zapisać dla wielkości kątowych w ruchu
obrotowym, ale prosta analogia ma miejsce tylko w przypadkach, gdy oś obrotu nie zmienia kierunku (ustalona oś,
toczenie prostoliniowe). Zasady te mogą być stosowane w układach nieinercjalnych po uwzględnieniu sił bezwładności.
Czyli
:
I ZASADA DYNAMIKI NEWTONA -
Jeżeli siły działające na punkt materialny równoważą się, to w
inercjalnym układzie odniesienia ciało porusza się ruchem prostoliniowym jednostajnym lub spoczywa.
II ZASADA DYNAMIKI NEWTONA -
Zmiana pędu ciała jest równa popędowi działającej na nie wypadkowej
siły F
III ZASADA DYNAMIKI NEWTONA -
Jeśli ciało A działa na ciało B siłą F, to B działa na A siłą o tej samej
wartości i kierunku, lecz o przeciwnym zwrocie (zasada akcji i reakcji). Dla ciał o stałej masie II zasada
dynamiki Newtona ujmowana jest w postaci równania
gdzie m - masa ciała,
- przyspieszenie,
- wypadkowa działająca siła.
Równanie:
jest prawdziwe również dla układów o zmiennej masie - jest ogólniejsze - i dlatego często
określane jako II zasada dynamiki Newtona w postaci uogólnionej.
Zasady dynamiki Newtona są fundamentem klasycznej fizyki. W świetle mechaniki kwantowej i teorii
względności okazały się prawami przybliżonymi.

3.
Układy inercjalne i nieinercjalne, siły bezwładności.
Układ inercjalny (inaczej inercyjny) – układ odniesienia, względem którego każde ciało, niepodlegające
zewnętrznemu oddziaływaniu z innymi ciałami, porusza się bez przyspieszenia (tzn. ruchem jednostajnym
prostoliniowym lub pozostaje w spoczynku). Istnienie takiego układu jest postulowane przez pierwszą zasadę dynamiki
Newtona. Zgodnie z zasadą względności Galileusza wszystkie inercjalne układy odniesienia są równouprawnione i
wszystkie prawa mechaniki i fizyki są w nich identyczne.
Inercjalny układ odniesienia można również zdefiniować jako taki układ, w którym nie pojawiają się pozorne siły
bezwładności.
Układ inercjalny w ogólnej teorii względności
Uogólnienie zasady równouprawnienia wszystkich układów na układy nieinercjalne jest podstawową treścią ogólnej
teorii względności. W teorii tej wprowadzone zostało pojęcie układu lokalnego, czyli ograniczonego w przestrzeni.
Układ taki, poruszając się swobodnie wraz z jakimś ciałem w polu grawitacyjnym, mimo że jako całość przyspiesza,
wewnątrz pozostaje inercjalny – nie pojawiają się w nim pozorne siły bezwładności. Z kolei w sytuacji, gdy układ taki
spoczywa na powierzchni planety, znajdujący się w nim obserwator nie jest w stanie stwierdzić, czy działająca na niego
siła jest siłą grawitacji, czy wynika z przyspieszenia, z jakim układ się porusza.
Poszukiwania uniwersalnego układu odniesienia
Ziemię przyjmuje się często za układ inercjalny. W rzeczywistości, układ związany z Ziemią nie jest inercjalny
ponieważ w związku z jej ruchem obrotowym, na ciała materialne znajdujące się na jej powierzchni, działają siły
bezwładności: siła odśrodkowa oraz siła Coriolisa. Lepszym przybliżeniem układu inercjalnego jest układ związany ze
Słońcem. Ten układ z kolei, też nie jest dokładnie inercjalny, ponieważ Układ Słoneczny okrąża centrum naszej
Galaktyki. Arystoteles a za nim również Kopernik wiązali uniwersalny układ odniesienia z gwiazdami stałymi, czyli
gwiazdami, które na sferze niebieskiej wydawały się nieruchome. Obecnie wiemy, że gwiazdy, całe galaktyki i ich
gromady poruszają się względem siebie z prędkościami, które mogą zbliżać się do prędkości światła.
Po odkryciu przez A.A. Penziasa i R.W. Wilsona promieniowania reliktowego powstała nowa możliwość
ustalenia uniwersalnego inercjalnego układu odniesienia. Okazało się bowiem, że promieniowanie to wykazuje bardzo
wysoki stopień jednorodności. I tak mierząc przesunięcie ku czerwieni (a w przeciwnym kierunku przesunięcie ku
fioletowi) tego promieniowania udało się wyznaczyć prędkość naszej Galaktyki w ruchu wokół jej centrum.
Można zatem zdefiniować Uniwersalny Inercjalny Układ Odniesienia jako taki, w którym promieniowanie
reliktowe nie jest przesunięte ku czerwieni w żadnym kierunku.
Nieinercjalny układ odniesienia – układ odniesienia poruszający się ruchem niejednostajnym względem
jakiegokolwiek inercjalnego układu odniesienia.
Transformacja równań ruchu z układu inercjalnego do układu nieinercjalnego powoduje, że w równaniu ruchu
zapisanym w układzie nieinercjalnym pojawiają się dodatkowe wyrazy, których wartość zależy od ruchu układu
nieinercjalnego względem inercjalnego. Wyrazy te mają wymiar siły i dlatego mówimy, że w takim układzie występują
pozorne siły. Przykładem takich sił jest siła bezwładności i siła Coriolisa.
Siła bezwładności (siła inercji, siła pozorna) - siła pojawiająca się w nieinercjalnym układzie odniesienia, będąca
wynikiem przyspieszenia tego układu. Siła bezwładności nie jest oddziaływaniem z innymi ciałami, jak to ma miejsce
przykładowo w sile klasycznie rozumianej grawitacji. Jeżeli zjawisko, w którym pojawiła się siła bezwładności,
opisywane jest w inercjalnym układzie odniesienia, wówczas siła bezwładności nie występuje, zachowanie się ciał w
takim układzie można wyjaśnić działaniem innych sił. Siła bezwładności działająca na ciało o masie m znajdujące się
w nieinercjalnym układzie poruszającym się z przyspieszeniem a wyrażona jest wzorem:
We wzorze tym minus oznacza, że zwrot siły bezwładności jest przeciwny do zwrotu przyspieszenia układu.
Rodzaje sił bezwładności:
siła Coriolisa
siła odśrodkowa
transwersalna siła bezwładności
Cel wprowadzania siły bezwładności
Zasady dynamiki Newtona obowiązują dla układów inercjalnych (stacjonarnych). Możliwa jest jednak transformacja
tych równań do układów nieinercjalnych (niestacjonarnych). W wyniku otrzymujemy równania analogiczne do równań
Newtona, przy czym transformacja powoduje powstanie dodatkowych wyrazów (o wymiarze siły). Właśnie te
dodatkowe wyrazy nazywa się w siłami bezwładności, nie są to jednak siły fizyczne, a tylko matematyczne artefakty
zmiany układu współrzędnych.
W szczególności postępowanie takie da się przeprowadzić dla układów, których ruch jest złożeniem ruchu
obrotowego oraz liniowo przyspieszonego (pod pewnymi warunkami na zależność przyspieszenia od czasu, np.
różniczkowalność). Wszelkie ruchy, które mogą być uważane za złożenie takich ruchów prostych, dopuszczają zatem
opis za pomocą równań Newtona uzupełnionych o siły bezwładności.
Wyprowadzenie
Zakładając, że wypadkowa sił, których źródłem są ciała, wynosi F, zgodnie z II zasadą dynamiki Newtona
przyspieszenie u względem dowolnego układu inercjalnego wynosi: u = F/m
Jednak w układach nieinercjalnych pęd opisany jest wartością u', a różnica a przyspieszeń ciała w dwóch układach:
inercjalnym i nieinercjalnym wynosi: a = u-u' czyli otrzymujemy iż u' = u-a , a przyspieszenie ciała względem układu
nieinercjalnego wynosi: u' = F/m - a
Widać więc, że nawet jeśli nie działa żadna siła, to ciało porusza się względem układu z przyspieszeniem -a (tak jakby
na ciało działała pozorna siła Fb=-m a
4. Praca, moc, energia.
Praca - jest to iloczyn skalarny (patrz Działania na wektorach) wektora siły F oraz wektora przesunięcia s:W = F *s *α
α jest kątem zawartym między kierunkami obydwu wektorów. Oczywiście jeśli kierunki są równoległe pracę można
obliczyć ze wzoru: W = F * s

Jednostką pracy jest dżul [J]. Praca o wartości 1 J wykonana jest wtedy, gdy pod działaniem siły o wartości 1N punkt
materialny zostanie przesunięty na odległość 1m: 1J = 1N * 1m = 1 kg * m2/s2
Jak więc widać, aby wykonać jakąś pracę należy zadziałać jakąś siłą na przedmiot i przesunąć go. Dlatego np. możemy
pójść sobie do lasu i spróbować przesunąć drzewo. Będziemy je pchać i pchać, ale ono jak stało tak będzie stało.
Chociaż my możemy się zmęczyć, to i tak nie wykonamy żadnej pracy. Praca może być zarówno dodatnia jak i ujemna,
ale ponieważ wiąże się to z energią omówię to nieco później.
Moc - jest to stosunek pracy do czasu w jakim została wykonana: P=W/t
Jednostką pracy w układzie Si jest wat [W]: 1 W = 1J/1s
Aby bardziej przybliżyć pojęcie mocy i pracy posłużę się przykładami: mam do wykonania pracę - muszę posprzątać
pokój, niestety zajęło mi to cały dzień, ponieważ pracowałem z małą mocą. Miesiąc później znowu trzeba posprzątać,
ale tym razem mama powiedziała, że mi pomoże. Razem zajęło nam to 2 h. Prosty wniosek, że z mamą mieliśmy
- tę samą pracę wykonaliśmy w znacznie krótszym czasie.
Energia - jest to zdolność do wykonania pracy. definicja ta jest chyba najkrótszą i najprostszą definicją szerokiego
pojęcia jakim jest energia. Jest ona jednak raczej poglądowa i nie jest tak dokładna jak inne definicje. Wynika to z
faktu, że nie wyznaczamy całkowitej energii posiadanej przez ciało, ale najwyżej jej zmiany - przyrosty i ubytki.
Energia mechaniczna dzieli się na energię potencjalną i kinetyczną. Energia potencjalna jest związana z położeniem
danego ciała, natomiast energia kinetyczna z jego ruchem. Mówimy, że ciało posiada mechaniczną energię potencjalną
gdy np. jakieś ciało wyniesione zostanie na pewną wysokość nad ziemią: spadając może ono podnieść inne ciało,
zgnieść siebie lub inne ciało itp. Jest to energia potencjalna grawitacji. Inną postacią energii potencjalnej jest energia
potencjalna sprężystości, którą posiada np. rozciągnięta lub ściśnięta sprężyna, która rozprężając się lub kurcząc może
wykonać pracę. Jeśli chodzi o matematyczne ujęcie energii potencjalnej grawitacji to posłużę się przykładem. Załóżmy,
że ciało o masie m znajduje się na pewnym poziomie, któremu umownie możemy przypisać wartość energii
potencjalnej równą zeru. Energia potencjalna EP związana z podniesieniem ruchem jednostajnym tego ciała na
wysokość h ponad poziom początkowy powstaje kosztem pracy pokonania siły ciężkości (w tym przypadku
zaniedbujemy opór powietrza itp.). Wynika z tego proste równanie: EP = W = mgh
Ciało posiada energię kinetyczną wtedy i tylko wtedy, gdy posiada prędkość. Załóżmy, że pędzący samochód uderza w
drzewo. Jego energia kinetyczna została zużyta na zmianę kształtu samochodu i drzewa :)
Niestety, żeby dojść do matematycznego ujęcia energii kinetycznej potrzeba jest kilka przekształceń różnych innych
równań znanych z wcześniejszej nauki mechaniki. Zakładamy, że na ciało o masie m pozostające w spoczynku zaczyna
działać stała siła F. Z II zasady dynamiki wiemy, że ciało to zaczyna poruszać się ruchem jednostajnie przyspieszonym.
Siła ta działając w czasie t na pewnej drodze s wykonuje pracę W: W = Fs = F . at2/2
Praca ta zostaje zmagazynowana w ciele pod postacią przyrostu energii kinetycznej, która na początku była równa zeru
(ciało nie posiadało prędkość), a po czasie t było równe Ek: W = Ek
Z II zasady dynamiki wyznaczamy przyspieszenie: a = F/m
Ek = F2t/2m
Korzystamy teraz znowu z II zasady dynamiki Newtona, ale tym razem z innej postaci: wykorzystujemy zależność

między zmianą pędu ciała, a iloczynem siły i czasu (tzw. popęd siły): Ft = mV i ostatecznie otrzymujemy: Ek = mV2/2
Słownie można to wyrazić w następujący sposób: Energia kinetyczna ciała jest równa połowie iloczyny masy tego ciała
i kwadratu jego prędkości. Jeśli chodzi o jednostkę pracy, to ponieważ można z wcześniejszych rozważań zauważyć, że
praca jest równa energii (o czym dokładniej w następnym podrozdziale) zatem jednostką energii jest dżul [J].
Związek pracy z energią - Siła, która wykonuje pracę nad danym ciałem powoduje zmianę jego energii całkowitej, w
zależności od kierunku i zwrotu tej siły może ona zwiększać ją lub zmniejszać. Np. jadący samochód zaczyna hamować
(działa siła tarcia), i z czasem zatrzymuje się. Należy się jednak zastanowić, co dzieje się z tą energią odebraną przez
działanie jakiejś siły. Czy możliwe jest zniszczenie lub stworzenie energii? Otóż biorąc pod uwagę fizykę, tylko Bóg
ma taką możliwość (w końcu jest wszechmogący). Energia odebrana samochodowi z poprzedniego przykładu zostaje
zamieniona na energię cieplną, dźwięk itp. Znowu spotykamy się z powiedzeniem, że w przyrodzie nic nie ginie.
Dobitnym tego przykładem jest zasada zachowania energii.
Zasada zachowania energii
W układzie odosobnionym od zewnętrznego otoczenia w ten sposób, że energia w żadnej postaci nie przenika do niego
z zewnątrz ani nie uchodzi z niego na zewnątrz, całkowita wartość energii pozostaje niezmienna: mogą w nim tylko
zachodzić przemiany energetyczne jednej postaci energii w inną. Szczególnym przypadkiem powyższej zasady jest
zasada zachowania energii mechanicznej. Rozważmy przykład piłki o masie m zawieszonej na wysokości h. Posiada
ona energię potencjalną Ep = mgh, jednak kiedy zacznie spadać nabiera z każdą sekundą prędkości, przez co zwiększa
się jej energia kinetyczna, natomiast ponieważ zmniejsza się wysokość, zmniejsza się energia potencjalna. Wszelkie
opory ruchu pomijamy. Jasno widać z tego przykładu, że energia potencjalna przechodzi w energię kinetyczną. Dzięki
zasadzie zachowania energii wiemy, że w dowolnym momencie ruchu tej piłki
energii potencjalnej i kinetycznej: Ec = Ep + Ek
5.
Siły tarcia.
Siły tarcia są siłami bardzo często występującymi w przyrodzie. Pojawiają się one zawsze wtedy, gdy chcemy
przesunąć względem siebie dwie stykające się powierzchnie. W zależności od sytuacji, staramy się je zwiększyć lub
zmniejszyć. Na przykład, gdy idziemy po oblodzonej jezdni, staramy się, aby były jak największe. Natomiast, gdy
powodują nagrzewanie się powierzchni i straty energii, dążymy do ich zmniejszenia.
Siły tarcia dzielimy na
a) kinetyczne (poślizgowe) , kiedy powierzchnie trące ślizgają się
b) statyczne, kiedy powierzchnie trące się nie ślizgają
Siły tarcia kinetycznego - im powierzchnie trące są bardziej chropowate, tym większe są siły tarcia. Poza tym, zależą
one od siły wzajemnego nacisku. Im powierzchnie trące są bardziej do siebie dociskane, tym większe są siły tarcia. W
wielu przypadkach, ale nie zawsze, siła nacisku jest równa ciężarowi ciała.
Gdybyśmy natomiast ciągnęli dwa klocki jak na rys.
wtedy okazuje się, że siła pokonująca siły tarcia jest taka sama, co świadczy o
tym, że siły tarcia nie zależą od wielkości powierzchni trących.
Ostatecznie:
Siły tarcia nie zależą od wielkości powierzchni trących tylko od ich rodzaju i wzajemnego nacisku (wprost
proporcjonalne). Można to zapisać wzorem Tk=fk*N, gdzie fk- współczynnik tarcia kinetycznego.
Tarcie kinetyczne dzielimy na tarcie: toczne , poślizgowe, wiertne.
Tarcie poślizgowe - jest to odłam tarcia zewnętrznego, ma ono miejsce przy ocieraniu się o siebie płaszczyzn dwóch
ciał stałych. Dla przykładu możemy użyć klocka leżący na stole, który popychamy.
Tarcie toczne ma miejsce w czasie toczenia się jednego ciała po drugim. Klasyfikacja ta zależy od typu ruchu
względnego stykających się ciał. Z tarciem tocznym spotykamy się w przypadku, gdy klocek zastąpimy walcem lub
kulą, występuje zawsze w przypadku toczenia się ciała po danej powierzchni, dlatego min. samochód nie napędzany
silnikiem w końcu musi się zatrzymać. Z tarciem wiertnym mamy do czynienia, jak sama nazwa wskazuje, w
przypadkach gdy dokonujemy pewnego drążenia ciałem w określonej powierzchni.
Te wszystkie rodzaje tarcia kinetycznego, a także tarcie statyczne są to przykłady tarcia zewnętrznego, z którym
mamy do czynienia, gdy powierzchnie stykają się ze sobą, spoczywających lub będących w ruchu względem
siebie.
Tarcie wewnętrzne (lepkość) - Jest to tarcie jakie powstaje we wnętrzu cieczy bądź gazu, powodujące powstawanie sił
oporów pomiędzy poruszającymi się warstwami cieczy lub gazu.
Wszystkie jednak zjawiska tarcia prowadzą do podobnych efektów - rozpraszania energii kinetycznej ciała, poprzez
wydzielanie ciepła, elektryzowanie się, a nawet niszczenie.
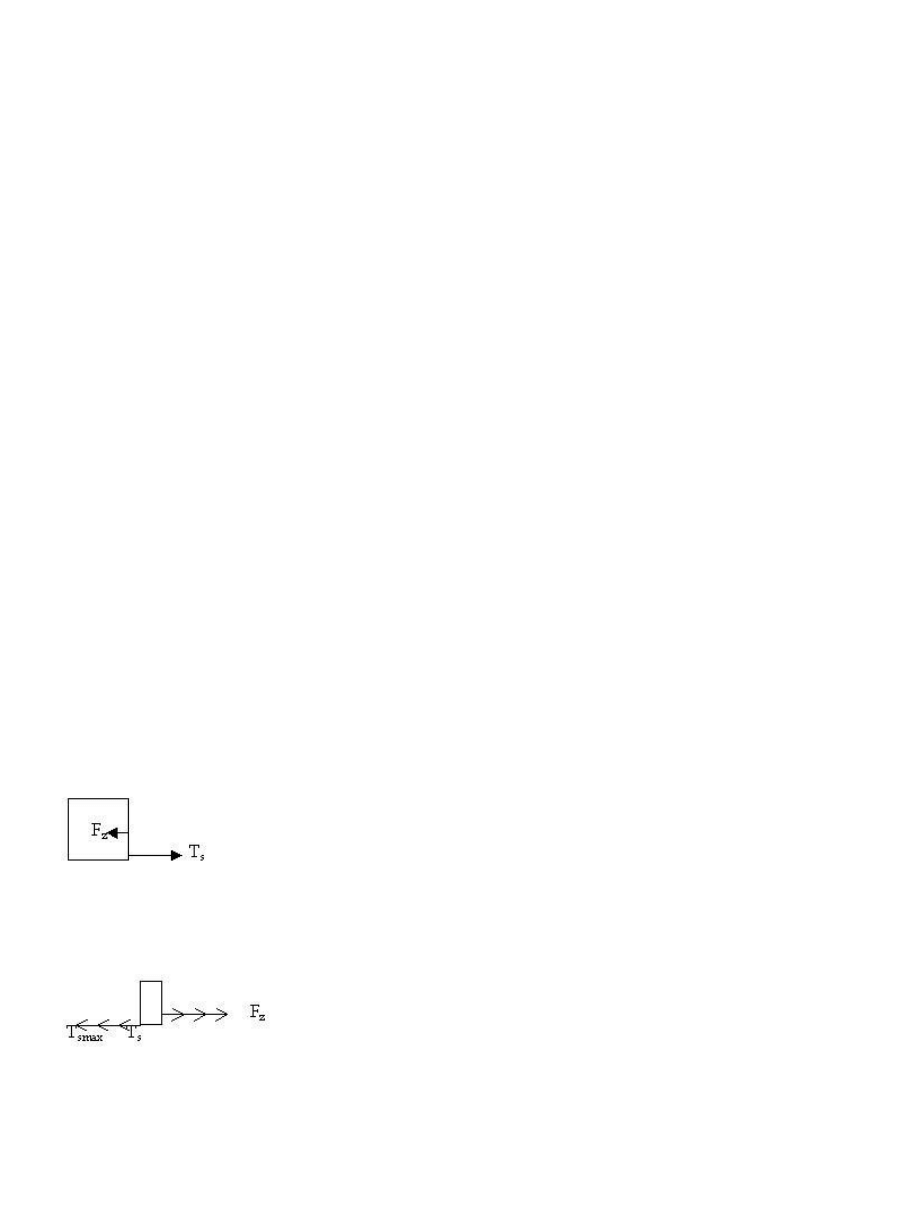
Tarcie statyczne jest trochę bardziej skomplikowane. Gdy na ciężką szafę podziałamy względnie małą siłą, to okazuje
się, że jest ona w spoczynku. Dlaczego tak jest? Dlaczego nie rusza z miejsca? Każdy odpowiada, że przeszkadza temu
siła tarcia. Jaka ona jest w stosunku do działającej siły zewnętrznej? Wiele osób sugeruje, że jest ona większa od siły
jaką my działamy i dlatego szafa nie rusza. Takie tłumaczenie jest jednak sprzeczne z 1-szą zasadą dynamiki ( aby ciało
pozostawało w spoczynku działające siły powinny się równoważyć).
Poza tym, gdyby tak było to, z drugiej zasady dynamiki wynikałoby, że na ciało działałaby
wtedy wypadkowa siła skierowana przeciwnie do siły zewnętrznej i szafa ruszyłaby na osobę
pchającą. ( W przypadku szafy nie byłoby to takie groźne, ale wyobrażam sobie, co by było
gdybym chciał pchnąć walec drogowy?)
Ostatecznie z tego wynika, że siła tarcia statycznego musi być dokładnie równa sile zewnętrznej. Gdy siła zewnętrzna
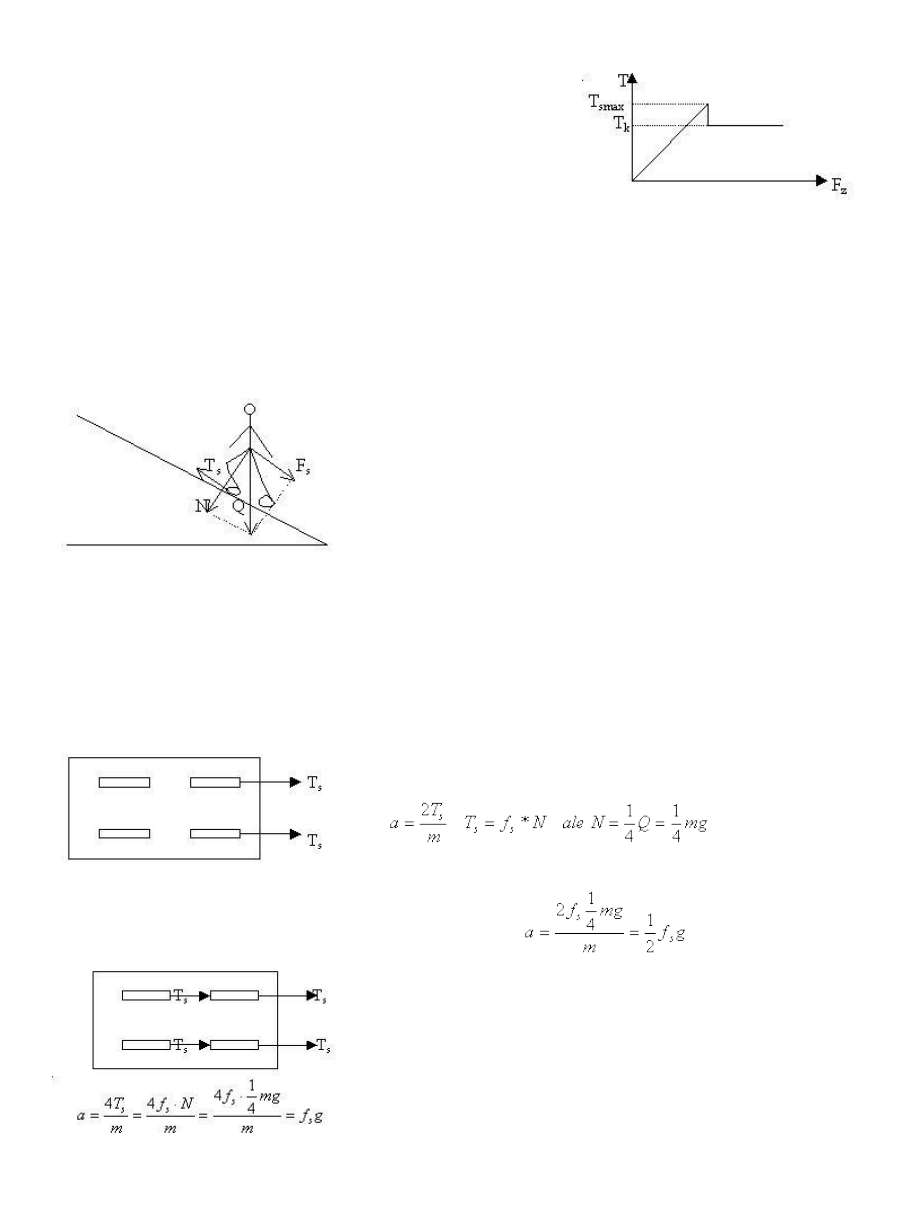
rośnie, to siła tarcia statycznego także rośnie, co ilustruje nam zamieszczony poniżej rysunek.
Proces zachodzi aż do osiągnięcia przez siłę tarcia pewnej maksymalnej wartości. Gdy
siła zewnętrzna będzie od niej większa, ciało ruszy z miejsca. Ta maksymalna siła tarcia statycznego może być
obliczona ze wzoru : Tsmax=fs*N , gdzie fs- współczynnik tarcia statycznego. Maksymalna siła tarcia statycznego jest
o kilka procent większa od siły tarcia kinetycznego, o czym możemy
przekonać się choćby podczas próby ruszenia sanek z miejsca. Na początku
musimy działać dużą siłą, aby je ruszyć, a później jest dużo łatwiej. Stąd
Tsmax>Tk, więc fs>fk.
Zależność siły tarcia od siły zewnętrznej można zilustrować wykresem
ZASTOSOWANIE SIŁ TARCIA STATYCZNEGO
Większa wartość siły tarcia statycznego od kinetycznego została wykorzystana w samochodach, w których zastosowano
ABS. Jest to system uniemożliwiający blokowanie się kół podczas hamowania. Dzięki temu po naciśnięciu hamulców
koła nie ślizgają się po jezdni. Występuje wtedy między oponami a jezdnią tarcie statyczne, które jest większe od
kinetycznego, dzięki czemu droga hamowania jest krótsza.
Podobnie jest podczas wchodzenia na oblodzoną górę. Stawiamy
względnie wolno nogi, aby występowało tarcie statyczne
Ts równoważące siłę ściągającą Fs. Jeżeli góra jest dość stroma, siła
tarcia osiąga prawie maksymalną wartość. Gdy wtedy się poślizgniemy
zaczyna działać siła tarcia kinetycznego, która jest mniejsza niż statyczne.
Wtedy siła ściągająca jest większa od siły tarcia kinetycznego i -
wędrówkę w górę trzeba rozpocząć od początku.
Rozpatrzmy teraz maksymalne przyśpieszenie z jakim może ruszyć samochód mający napęd na
a) dwa koła
b) cztery koła
jeżeli współczynnik tarcia opon o jezdnię wynosi fs
ad a)
Przyśpieszenie samochodu można obliczyć ze wzoru
, bo siła nacisku
przypadająca na jedno koło jest równa ¼ ciężarowi samochodu. ostatecznie:
ad b)
Widać od razu, że w przypadku napędu na cztery koła przyśpieszenie
samochodu jest dwukrotnie większe.
Podobnie jest podczas hamowania. Ponieważ w wielu przypadkach
skrócenie drogi hamowania decyduje o bezpieczeństwie jazdy, dlatego
hamulce są instalowane zawsze na wszystkie koła. To, że siła tarcia statycznego jest większa od kinetycznego zostało
wykorzystane w ABS, czyli w systemie uniemożliwiającym blokowanie się kół podczas hamowania. Wtedy między
oponami a jezdnią występuje tarcie statyczne, większe od kinetycznego, dzięki
czemu droga hamowania jest krótsza.
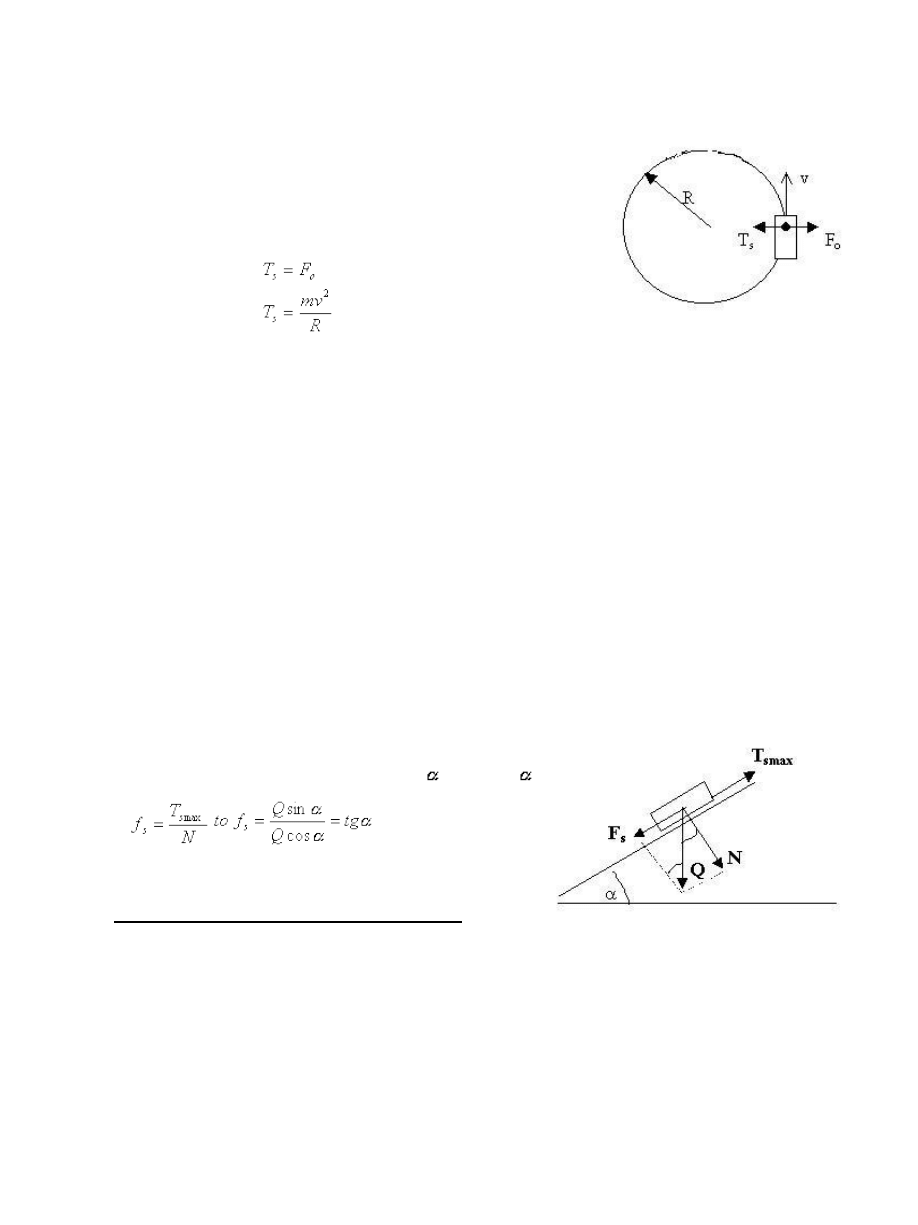
Pozytywne zastosowanie sił tarcia statycznego można także zaobserwować podczas
jazdy samochodem z prędkością v po zakręcie o promieniu R. Działająca wtedy na
samochód siła odśrodkowa Fo jest równoważona siłą tarcia Ts.
Zgodnie ze wzorem:
widać, że im większa prędkość samochodu, tym działa większa siła tarcia statycznego. Trwa to aż do momentu, gdy
siła odśrodkowa nie przekroczy maksymalnej siły tarcia statycznego. Wtedy tarcie statyczne zmieni się w tarcie
kinetyczne. A ponieważ jest ono mniejsze od statycznego to równowaga zostanie zachwiana i siła odśrodkowa wyrzuci
nas z zakrętu. Podane wyżej przykłady przedstawiają pozytywne skutki występowania sił tarcia. Jednak w
wielu sytuacjach, ich działanie jest niekorzystne.
Rozpatrzmy ruch samochodu ze stała prędkością. Moc silnika można opisać wzorem: P=F*v
gdzie F jest siłą ciągu, a v prędkością. W przypadku działania tylko sił tarcia, niezależnych od prędkości, moc
zależałaby liniowo od prędkości. Gdybyśmy natomiast uwzględniali tylko siły oporu powietrza , które są
proporcjonalne do prędkości (Fo=bv) i gdyby siła ciągu silnika tylko ją pokonywała, to podstawiając do wzoru na moc
otrzymalibyśmy: P=b*v2. Widać z tego, że gdyby prędkość wzrosła dwukrotnie, to moc silnika musiałaby wzrosnąć
czterokrotnie.
WYZNACZANIE STATYCZNEGO WSP. TARCIA
W celu wyznaczenia statycznego współczynnika tarcia szukamy takiego kąta a przy którym ciało zacznie się zsuwać.
Wtedy siła zsuwająca będzie się równać maksymalnej sile tarcia
statycznego Tsmax. Fs=Tsmax, ale z rysunku Fs=Qsin
, a N=Qcos
ponieważ
6.
Moment bezwładności, twierdzenie Stainera.
Moment bezwładności to miara bezwładności ciała w ruchu obrotowym względem określonej, ustalonej osi obrotu. Im
większy moment, tym trudniej zmienić ruch obrotowy ciała, np. rozkręcić dane ciało lub zmniejszyć jego prędkość
Twierdzenie Steinera – twierdzenie mechaniki oraz wytrzymałości materiałów opisujące sposób
znajdowania momentu bezwładności danej bryły względem danej osi przy danym momencie bezwładności względem
osi równoległej i przechodzącej przez środek masy bryły. Jego autorem jest Jakob Steiner.
Mówi, że moment bezwładności bryły sztywnej względem dowolnej osi jest równy sumie momentu bezwładności
względem osi równoległej do danej i przechodzącej przez środek masy bryły oraz iloczynu masy bryły i kwadratu
odległości między tymi dwiema osiami, co można wyrazić wzorem:
gdzie:
– moment bezwładności względem osi przechodzącej przez środek masy,
– moment bezwładności względem osi równoległej do pierwszej osi,
– odległość między osiami,
– masa bryły.
Moment bezwładności osiąga minimalną wartość, gdy oś przechodzi przez środek masy.
7.
Zasady dynamiki Newtona dla ruchu obrotowego bryły sztywnej.
Bryłą sztywną nazywamy takie ciało, w którym wszystkie punkty mają zawsze względem siebie stałą odległość. Pewną
ilustracją zachowania się ciała, które jest w dobrym przybliżeniu bryłą sztywną lub nią nie jest próba wprawienia w
ruch obrotowy jajka. Jajo gotowane jest bryłą sztywną i długo obraca się po pokręceniu. Jajko surowe jest wypełnione
cieczą i dlatego nie jest bryłą sztywną. Po lekkim pokręceniu jego wnętrze pozostaje nieruchome, czyli jako całość ma
średnio bardzo niewielką prędkość obrotową, dlatego po ustaniu pokręcania dość szybko wytraca prędkość.
II ZASADA DYNAMIKI NEWTONA- jeśli na bryłę sztywna działa siła lub działają siły, których moment siły jest
stały różny od zera to porusza się ona ruchem obrotowym jednostajnie zmiennym z przyspieszeniem kątowym
wprostproporocjonalnym do momentu siły, a odwrotnie proporcjonalny do momentu bezwładności.
Czyli: przyspieszenie kątowe jest wprost proporcjonalne do działającego na bryłę momentu sił a odwrotnie
proporcjonalne do momentu bezwładności tej bryły.
9. Drgania harmoniczne. Energia w ruchu drgającym.
Ruch drgający - jest to ruch, przez który ciało pod wpływem działającej siły drga.
Wielkości opisujące ruch drgający to:
*amplituda - maksymalne wychylenie z położenia równowagi
*częstotliwość - liczba drgań w 1 sekundzie
*okres drgań - czas w którym ciało wykonuje jedno pełne drganie
Ruch harmoniczny - jest to ruch powtarzający się. Prędkość ciała ulega zmianie, zmienia się też jej wartość i zwrot. W
położeniach maksymalnego wychylenia szybkość ciała drgającego jest równa zero. Ciało zbliża się do położenia
równowagi ruchem przyspieszonym, a oddala opóźnionym. Ruch drgający harmoniczny/prosty; jego wykresem jest
sinusoida, która w interpretacji matematycznej jest funkcja harmoniczną. Jest to ruch okresowy, jako że powtarza się w
regularnych odstępach czasu. Mamy z nim do czynienia wtedy, gdy na ciało działa siła proporcjonalna do wychylenia.
Przykładem może być wahadło: ciężarek zawieszony na np. sprężynie.

Wahadło matematyczne - składa się z nierozciągliwej i nieważkiej linii, na której zawieszony jest punkt materialny.
Energia w ruchu harmonicznym prostym
Energia potencjalna sprężystości jest określona dla ciała zawieszonego na sprężynie. Wyrażana jest już wcześniej
wspomnianym wzorem: F= -kx;
Energia kinetyczna ciała wynika z jego ruchu: E=(m*v^2)/2 gdzie: m- masa
v- prędkość
Dla ciała, które drga z prędkością maksymalną (przechodzące przez położenie równowagi), mamy: v
0
= x
0
ω
0
a prędkość chwilowa zmienia się w zależności od czasu następująco: v(t)=x*w*cos(w*t+ f)
gdzie: x- wychylenie
w- prędkość kątowa omega
f- faza początkowa
Natomiast przyśpieszenie dane jest wzorem: a(t)= -x*(w^2)*cos(w*t+ f)
Na całkowitą energię układu składa się zarówno energia potencjalna, jak i kinetyczna.
10. Drgania tłumione logarytmiczny dekrement tłumienia.
Drgania tłumione- jeżeli na ciało działa siła sprężystości oraz odpowiednio słaba siła oporu, to ciało po wychyleniu ze
stanu równowagi wykonuje drgania tłumione o coraz to mniejszej amplitudzie.
Logarytmiczny dekrement tłumienia - wielkość fizyczna charakteryzująca zanikanie drgań swobodnych w układzie
drgającym (mechanicznym, akustycznym, elektrycznym); zdefiniowany jako logarytm naturalny stosunku 2 kolejnych
(w tę samą stronę) maksymalnych wychyleń drgającej cząstki lub wartości odpowiedniej wielkości fizycznej (np.
natężenia prądu elektrycznego)
Drgania
tłumione,
logarytmiczny
dekrement
tłumienia.
:D
Jeżeli drgania ciała odbywają się w ośrodku materialnym ( gaz, ciecz), to w skutek działania siły oporu ośrodka
(siły tłumienia )drgania będą się zmieniać. Niezależnie od natury ośrodka siła tłumiąca F jest proporcjonalna do prędkości ciała
drgającego, jeśli prędkość ta jest niewielka: Ft=-f*dx/dt, gdzie: f- współczynnik oporu, Ft - siła skierowana przeciwnie do
kierunku ruchu (stąd -). Uwzględniając działanie siły tłumienia możemy dla drgań tłumionych, zgodnie z druga zasadą dynamiki
możemy zapisać równanie: Fs+Ft=ma, czyli: -kx –f dx/dt= m d²x/dt² całośc podzielimy przez m i otrzymamy: d²x/dt²=-k/m*x-
f/m*dx/dt, k/m=
ο², f/m=2
Czyli po podstawieniu otrzymamy: d²x/dt²=-
ο²-2
dx/dt. x=r
e(-
t)cos[√(
²-
²t)+
,
gdzie:
√(
²-
²),
,
pulsacja drgań tłumionych,
współczynnik tłumienia. r=ro*e(-
t). T=2
√(
²-
²). Jeśli
to r=ro=const., (ruch charmoniczny z częstotliwością
Jeśli
²=
² (tłumienie duże ruch aperiodyczny). Logarytmiczny
dekrement tłumienia.
ln(roe(-
t))/roe(-
t+T))= ln e(
T)=
T.
, współczynnik tłumienia,
f=2
m=2
m.
Logarytmiczny dekrement tłumienia jest to logarytm naturalny stosunku dwóch amplitud w chwilach t i t+T. Czas relaksacji (
) jest
to czas po którym amplituda zmaleje e-krotnie, (
-czas relaksacji) .
,
, N- liczba drgań po ktorej amplituda zmaleje e-
krotnie. r
r
e,
11. Drgania wymuszone, rezonans.
Okres drgań wahadła wychylonego o bardzo małym kącie nie zależy od kąta wychylenia.
Raz wprawione w ruch wahadło wykonuje drgania o nie zmieniającym się okresie, zwanym okresem drgań własnych.
Ta własność wahadła nazywa się izochronizmem. Odwrotność okresu drgań własnych to częstotliwość drgań właśnych.
Odmienna sytuacja zachodzi wtedy, gdy drgania ciała wywołuje zewnętrzna siłą, zmieniającą się okresowo;
np:* most, który drga pod wpływem maszerującej po nim kolumny żołnierzy - Takie drgania nazywamy drganiami
wymuszonymi. Jeżeli częstotliwość siły wymuszonej i częstotliwości drgań własnych są równe lub prawie równe, to
amplituda osiąga maksymalną wartość. Takie zjawisko nazywa się rezonansami a częstotliwość wymuszająca drgania
rezonansowe - częstotliwością rezonansową.
Drgania tłumione oraz rezonans mechaniczny.
Zjawisko rezonansu dotyczy ciał drgających harmonicznie w sposób tłumiony (np. wahadło fizyczne, huśtawka). Jest to
przekazywanie drgań z jednego ciała na drugie, pod warunkiem, że częstotliwość drgań własnych obu wahadeł jest taka
sama (przykładem mogą być drgania głośników, wywołane przez bardzo głośną muzykę lub brzęczenie szyb w
autobusach spowodowane drganiami silnika pojazdu. Częstotliwość drgań własnych ciała opisuje kilka parametrów:
masa, tłumienie oraz współczynnik sprężystości określają jego częstotliwość drgań zanikających podczas tłumienia
(amplituda maleje wykładniczo). Jeżeli do tego dojdzie trzecia siła o pewnej częstotliwości f, będzie ona źródłem
energii dla ciała drgającego (np. popychanie huśtawki co pewien czas). Gęstość ośrodka wpływa na siłę oporu, od której
z kolei zależy tłumienie drgań.
12. Fale, podstawowe własności, równanie fali.
Fala - zaburzenie rozprzestrzeniające się w ośrodku lub przestrzeni. W przypadku fal mechanicznych cząstki ośrodka, w
którym rozchodzi się fala, oscylują wokół położenia równowagi, przy czym przenoszą energię z jednego miejsca do
drugiego bez transportu jakiejkolwiek materii.
Wszystkie fale wykazują następujące własności:
prostoliniowe rozchodzenie się fali w ośrodkach jednorodnych,
odbicie – po dojściu do granicy ośrodków fale zmieniają kierunek poruszając się nadal w tym samym ośrodku
załamanie – na granicy ośrodków fala przechodząc do ośrodka, w którym porusza się z inną prędkością,
zmienia kierunek swego biegu,
dyfrakcja – uginanie się fali na krawędziach, czego skutkiem jest zdolność do omijania przeszkód mniejszych
niż długość fali, oraz powstawanie pasków dyfrakcyjnych po przejściu fali przez wąską szczelinę albo
przeszkodę;
Rozchodzące fale nakładają się na siebie w wyniku czego zachodzą zjawiska:
interferencja – nakładanie się spójnych fal z różnych źródeł, które prowadzi do wzmocnienia lub wygaszenia się
fal;
dudnienie – oscylacje amplitudy fali;
Fale o różnych długościach mogą w różnych ośrodkach rozchodzić się z różnymi prędkościami. Efekt ten, nazywamy
dyspersją fali, powoduje na przykład:
rozszczepienie – załamanie fal pod różnymi kątami, zależnie od ich długości, powoduje rozkład fali na fale
składowe, np. rozszczepienie światła w pryzmacie.
Fale poprzeczne i podłużne
Fale poprzeczne mają kierunek drgań prostopadły do kierunku rozchodzenia się (np. fala na sznurze, fale
elektromagnetyczne). W falach podłużnych drgania odbywają się w tym samym kierunku, w którym następuje ich
propagacja (np. fale dźwiękowe). W przypadku fal rozchodzących się na wodzie mamy do czynienia z superpozycją
drgań poprzecznych i podłużnych.
Polaryzacja - Fale poprzeczne mogą być spolaryzowane, co oznacza, że kierunek drgań jest w pewien sposób
uporządkowany, na przykład odbywają się one w jednej płaszczyźnie (polaryzacja liniowa). Fale radiowe generowane
przez anteny są spolaryzowane. Większość źródeł fal świetlnych generuje fale niespolaryzowane, w których drgania w
różnych kierunkach się nakładają.
Matematyczny opis fali
Matematycznie fala to rozwiązanie równania falowego. Jest to dowolna funkcja różniczkowalna spełniająca to równanie.
Rozwiązania równania falowego tworzą przestrzeń liniową, która jest przestrzenią Hilberta. Jako bazę tej przestrzeni
można wybrać drgania podstawowe w postaci przebiegów harmonicznych (dla prostokątnego układu współrzędnych, w
wypadku innych symetrii zjawiska właściwsze stają się inne bazy, jak np. harmoniki sferyczne czy bardziej
skomplikowane funkcje specjalne). Dowolne rozwiązanie równania falowego, a więc dowolną falę można przedstawić
jako sumę szeregu funkcji bazowych, a więc przebiegów harmonicznych, co jest zasadą analizy harmonicznej odkrytej
przez Fouriera.
Fala harmoniczna- Najprostszym rodzajem fali jest fala harmoniczna biegnąca, zwana też falą sinusoidalną,
rozchodząca się w ośrodku jednowymiarowym (np. lince).
Falę harmoniczną opisuje równanie fali biegnącej, które jest rozwiązaniem równania falowego w jednym wymiarze
(wzdłuż np. osi z). Wielkością drgającą jest pewna wielkość fizyczna y (np. wysokość nad poziomem morza, gęstość,
natężenie pola elektrycznego). Dla fali o okresie T i długości λ rozwiązanie równania falowego można przedstawić w
postaci
co można zapisać prościej:
gdzie:
A – amplituda fali,
T – okres drgań,
λ – długość fali,
ω – częstość kołowa zwana krótko częstością lub pulsacją fali,
,
k – liczba falowa,
φ – faza początkowa
Argument funkcji sinus
to faza fali.
Punkt o danej fazie porusza się z prędkością, zwaną prędkością fazową:
Jeżeli amplituda fali zmienia się, to zmiana amplitudy może rozchodzić się z inną prędkością niż prędkość fazowa.
Prędkość rozchodzenia zmiany amplitudy nazywana jest prędkością grupową fali v
g
określona jest wzorem:
Z prędkością zmiany amplitudy (czoła fali) poruszają się modulacje fali, oznacza to że informacje przenoszone przez
falę rozchodzą się z prędkością grupową. Jeżeli prędkość fazowa nie zależy od liczby falowej fali, prędkość fazowa i
grupowa są sobie równe a falę taką określa się jako niedyspersyjną, w przeciwnym przypadku fala ulega zjawiskom z
tym związanym zwanymi dyspersją.
W ośrodkach wielowymiarowych kształt czoła fali zależy od warunków jej wytworzenia. Może być np.
płaszczyzną (fala płaska), kołem (fala kolista) powierzchnią kuli (fala kulista) a nawet stożkiem (gdy źródło fali porusza
się z prędkością większą od prędkości grupowej).
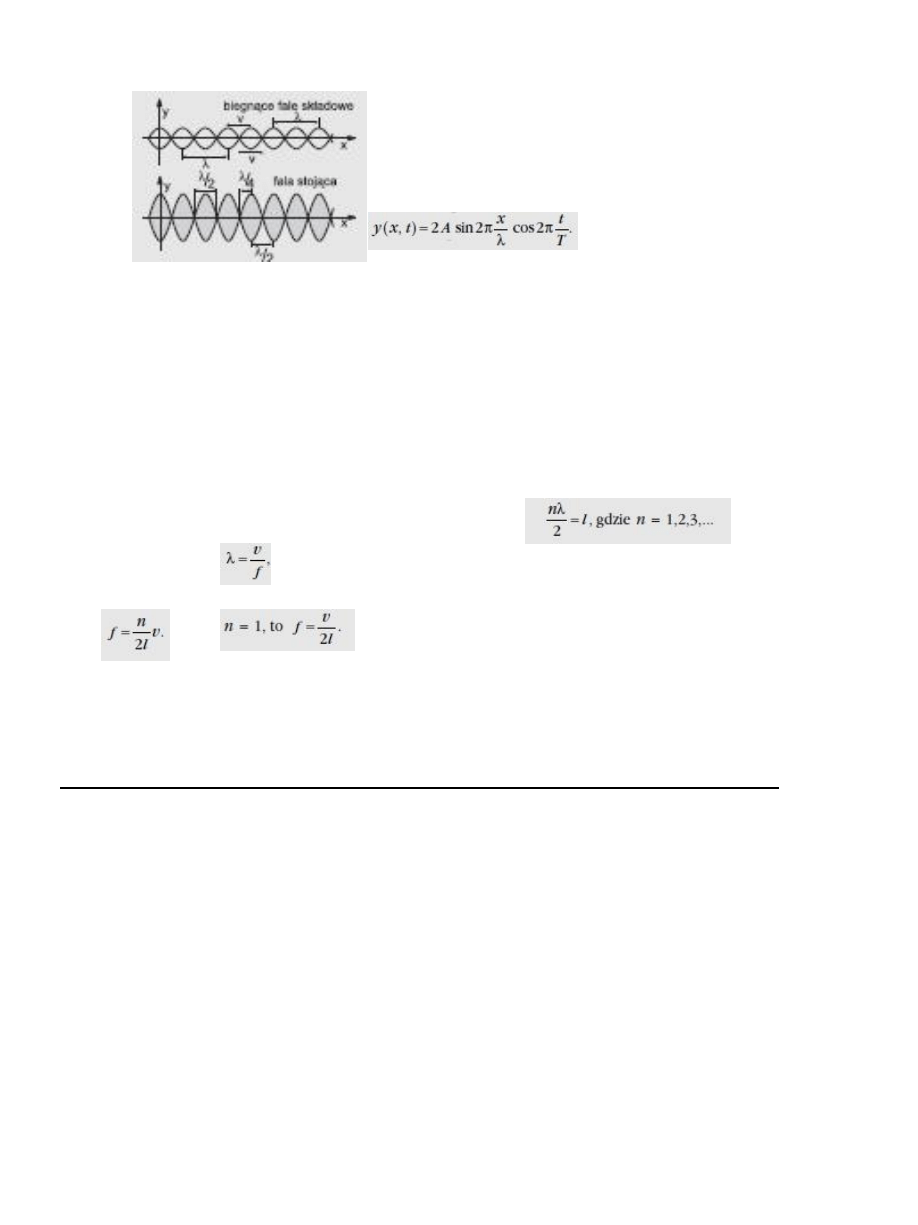
13. Fale stojące.
Fala, która powstaje z nałożenia się dwóch fal spójnych jest fala stojącą. Falą stojącą nazywana jest taka fala, której
amplituda wychylenia zależy tylko od położenia. Można więc zaobserwować punkty, które są węzłami fali oraz takie,
które są strzałkami fali. Odległość między sąsiednimi węzłami lub strzałkami wynosi połowę długości fali.
Fale stojące mogą powstawać w obszarach ograniczonych. Wtedy fala biegnąca w jednym kierunku nakłada się na falę
odbitą od granicy obszaru i biegnącą w kierunku przeciwnym. W wyniku interferencji takich fal powstaje fala stojąca.
Różne cząsteczki ośrodka, w którym obecna jest fala stojąca wykonują drgania o różnych amplitudach, ale o tej samej
częstości.
Równanie
fali stojącej ma postać:
Falę stojącą charakteryzują następujące pojęcia:
• węzeł fali stojącej to miejsce, w którym cząsteczka ośrodka nie wykonuje drgań,
• strzałka fali stojącej to miejsce, w którym cząsteczka ośrodka wykonuje drgania z maksymalną amplitudą.
Przykład:
Fala stojąca powstanie wtedy, gdy najpierw wygniemy, a potem puścimy swobodnie strunę gitarową. Ponieważ końce
struny są zamocowane, to muszą powstać w nich węzły fali stojącej. Pomiędzy zamocowanymi końcami struny
o długości l musi zmieścić się całkowita ilość połówek długości fali.
Korzystając z tego, że
możemy wyprowadzić wzór na częstotliwości fal, jakie mogą powstać na tej strunie:
Gdy
Tę częstotliwość nazywamy częstotliwością podstawową. Możemy więc powiedzieć, że częstotliwość fali, jaka może
powstać na strunie, jest całkowitą wielokrotnością częstotliwości podstawowej.
14. Fale świetlne. Fala świetlna na granicy dwóch ośrodków. Prawa optyki. Zasada Fermata.
Fale świetlne są falami elektromagnetycznymi, a więc rozchodzą się w przestrzeni jako zaburzenia pól: elektrycznego i
magnetycznego. Falę świetlną można również traktować jako strumień fotonów. Wiadomo bowiem ,że światło ma
dwoistą, korpuskularno - falowa naturę. Istnieją zjawiska przemawiające zarówno za jednymi jak i drugimi
własnościami światła. Do zjawisk będących dowodem na istnienie fotonów jest zjawisko fotoelektryczne zewnętrzne.
Zjawisko to polega na wybijaniu elektronów z atomów przez fotony, które padają na materię. Cała energia fotonu
zostaje przekazana elektronowi. Innym dowodem na korpuskularną naturę światła jest efekt Comptona. On również
polega na wybijaniu elektronów, ale z wewnętrznych powłok elektronowych. Foton nie ulega całkowitemu zanikowi,
ale zmienia swój bieg część energii przekazując elektronowi.
Zachowanie się fali świetlnej na granicy dwóch ośrodków opisują dwa prawa: prawo odbicia i załamania światła.
Okazuje się, że dla fal, które ulegną odbiciu kąt padania jest zawsze równy kątowi odbicia. A promień padający,
promień odbity i normalna do powierzchni styku leżą w jednej płaszczyźnie. Tego dotyczy prawo odbicia.
Kątem padania nazywa się kąt, który został zawarty między normalna do powierzchni a promieniem padającym.
Natomiast kąt między promieniem odbitym a normalną do powierzchni to kąt odbicia. Tych promieni, które przeszły do
drugiego ośrodka dotyczy prawo załamania światła. Według tego prawa stosunek sinusa kąta padania do sinusa kąta
załamania promienia świetlnego na granicy dwóch ośrodków równa się stosunkowi bezwzględnego współczynnika
załamania ośrodka drugiego do bezwzględnego współczynnika załamania ośrodka pierwszego czyli względnemu
współczynnikowi załamania światła drugiego ośrodka względem pierwszego. Dzięki zjawisku odbicia światła można
obserwować obrazy przedmiotów przy pomocy zwierciadeł. W zależności od kształtu wyróżnia się: zwierciadła płaskie
oraz kuliste. Z kolei zwierciadła kuliste można jeszcze podzielić na wklęsłe oraz wypukłe.
Podstawowe prawa optyki to prawo odbicia i załamania światła.
Wg prawa odbicia w tej samej płaszczyźnie znajdują się: promień padający, promień odbity i normalna do powierzchni
wyprowadzone w miejscu padania promienia świetlnego. Przy tym kąt padania jest zawsze równy kątowi odbicia.
Wg prawa załamania stosunek sinusa kąta padania do sinusa kąta załamania promienia świetlnego na granicy dwóch
ośrodków równa się stosunkowi bezwzględnego współczynnika załamania ośrodka drugiego do bezwzględnego
współczynnika załamania ośrodka pierwszego czyli względnemu współczynnikowi załamania światła drugiego ośrodka
względem pierwszego
Zasada Fermata w optyce jest szczególnym przypadkiem zasady najmniejszego działania.
Zasadę tę sformułował Pierre de Fermat. Treść jej w ujęciu Fermata miała następujące brzmienie:
Promień świetlny poruszający się (w dowolnym ośrodku) od punktu A do punktu B przebywa zawsze lokalnie
minimalną drogę optyczną, czyli taką, na której przebycie potrzeba czasu najkrótszego.
Obecnie wiadomo, że sformułowanie to nie jest ścisłe. Światło w istocie porusza się po takiej drodze optycznej, która
jest stacjonarna, co oznacza, że czas jej pokonania nie zmienia się przy niewielkiej zmianie kierunku biegu promienia.
W klasycznych zagadnieniach (załamanie, odbicie od płaskiej powierzchni) jest to droga pokonywana w minimalnym
czasie. Ale w przypadku soczewkowania grawitacyjnego światło porusza się po drodze maksymalnej, podczas gdy przy
odbiciu od zwierciadła eliptycznego droga promienia osiąga punkt siodłowy (zmiana w jednym kierunku powoduje
wzrost czasu pokonania drogi a w kierunku prostopadłym do pierwszego – zmniejszenie).
Na podstawie zasady Fermata można wyprowadzić prawo odbicia i załamania.
15. Interferencja światła. Dyfrakcja światła. Dyfrakcja na szczelinie. Siatka dyfrakcyjna.
Dyfrakcja
Promienie światła rozchodzą się po liniach prostych, lecz przechodząc przez małe otwory ulegają ugięciu, czyli
dyfrakcji. Dyfrakcja, jako zjawisko typowe dla ruchu falowego, jest świadectwem falowej natury światła. Ponieważ
dyfrakcję można obserwować tylko wtedy, gdy rozmiary szczeliny są porównywalne z długością fali padającej na
szczelinę, to dyfrakcja światła, ze względu na małą długość fal świetlnych, zachodzi tylko na bardzo małych szczelinach.
Dla promieni rentgenowskich, które mają dużo krótszą falę, takimi szczelinami mogą być odstępy między atomami ciał
stałych. Dzięki dyfrakcji tych promieni na sieci krystalicznej ciał stałych można badać ich strukturę wewnętrzną.
Interferencja
Innym zjawiskiem zdradzającym falową naturę światła jest interferencja, będąca zjawiskiem charakterystycznym dla
każdego ruchu falowego. Polega ona na nakładaniu się fal pochodzących z różnych źródeł. Aby powstał stabilny i
możliwy do zaobserwowania obraz interferencyjny, to światło pochodzące z tych źródeł musi być spójne. Takie
warunki można uzyskać, kierując światło pochodzące z jednego źródła na dwie szczeliny, z których każda będzie
stanowiła odrębne źródło światła spójnego. Na skutek interferencji powstają naprzemiennie obszary wzmocnień i
wygaszeń fal składowych. Przy czym wzmocnienie fali nastąpi w tych punktach, dla których różnica dróg optycznych
dla obu fal delta r = d sinα będzie równa całkowitej wielokrotności długości fali:
Wygaszenie fali nastąpi w tych punktach, dla których delta r = d sinα będzie nieparzystą wielokrotnością połówek
długości fali:
Zjawisko dyfrakcji i interferencji jest wykorzystywane do wyznaczania długości fali świetlnej za pomocą siatki
dyfrakcyjnej. Siatka dyfrakcyjna to układ wielu szczelin, które można utworzyć, wykonując szereg równoległych rys
na szklanej lub plastikowej płytce. Rysy stanowią przeszkodę dla światła, a odstępy między nimi stanowią szczeliny,
przez które światło przechodzi, uginając się na nich. Fale ugięte na sąsiednich szczelinach interferują ze sobą. Znając
odległość między sąsiednimi szczelinami – d, którą nazywamy stałą siatki, i mierząc kąt ugięcia α, możemy obliczyć
długość fali λ.
16. Polaryzacja światła. Prawo Malusa.
Prawo Malusa – prawo odkryte przez francuskiego fizyka Malusa określające natężenie światła spolaryzowanego po
przejściu przez polaryzator. Natężenie światła spolaryzowanego liniowo po przejściu przez idealny polaryzator
optyczny jest równe iloczynowi natężenia światła padającego i kwadratu cosinusa kąta między płaszczyzną polaryzacji
światła padającego a płaszczyzną polaryzacji światła po przejściu przez polaryzator
gdzie:
I
0
– natężenie światła padającego,
θ – kąt między płaszczyzną polaryzacji światła padającego i płaszczyzną polaryzacji polaryzatora.
Prawo to wynika z faktu, że przez polaryzator przechodzi tylko składowa wektora natężenia pola elektrycznego fali
elektromagnetycznej zrzutowana na kierunek polaryzacji polaryzatora
Natomiast natężenie fali jest proporcjonalne do kwadratu jej amplitudy.
Gdy na idealny polaryzator pada światło niespolaryzowane, to wychodzące z niego światło spolaryzowane ma
dwukrotnie mniejsze natężenia w porównaniu do światła padającego
Zależność ta wynika z tego, że średnia wartość cos
2
θ jest równa 1/2.
W rzeczywistych polaryzatorach natężenie światła jest mniejsze z powodu pochłaniania światła w materiale
polaryzatora.
17. Prawo zachowania ładunku.
Zasada zachowania ładunku elektrycznego – jedna z zasad zachowania, którą można sformułować na kilka sposobów
W izolowanym układzie ciał całkowity ładunek elektryczny, czyli suma algebraiczna ładunków dodatnich i ujemnych,
nie ulega zmianie
Zmiana ładunku układu może zachodzić tylko na drodze przepływu ładunku
Potocznie zasada zachowania ładunku znaczy tyle co: "ładunek elektryczny jest niezniszczalny; nigdy nie ginie i nie
może być stworzony. Ładunki elektryczne mogą się przemieszczać z jednego miejsca w inne, ale nigdy nie biorą się
znikąd. Mówimy więc, że ładunek elektryczny jest zachowany." Mimo, iż ta definicja dobrze obrazuje samą zasadę, to
jednak nie jest ona do końca ścisła, ponieważ, jak współczesne badania wykazały, nie jest prawdą twierdzenie, że
ładunki są niezniszczalne i nie można ich wytworzyć. Podczas anihilacji dwie cząstki o przeciwnych ładunkach
przestają istnieć zamieniając się na energię pola elektromagnetycznego. Znikają również ich ładunki, ale całkowity
ładunek układu (równy 0) pozostaje niezmieniony. Odwrotnie dzieje się w procesie kreacji par (np. proton-antyproton),
gdzie kosztem energii pola powstają dwie cząstki o przeciwnych ładunkach).
Przykłady i konsekwencje
Jedną z bezpośrednich konsekwencji zasady zachowania ładunku jest pierwsze prawo Kirchhoffa. Może ono być
sformułowane w sposób nawiązujący do zasady zachowania ładunku w następujący sposób:
Ilość ładunków wpływających do węzła sieci równa jest ilości ładunków wypływających z tego węzła.
Zasada zachowania ładunku a symetrie
Zachowanie ładunku elektrycznego wynika z niezmienniczości względem transformacji cechowania funkcji
falowej cząstki naładowanej (np. elektronu)
Transformacje e
iα
generowane są przez ciągły kąt α, ich zbiór tworzy prostą grupę Liego jednowymiarowych macierzy
unitarnych U(1). Lokalna ( gdy kąt α(x,t) jest zmienny w czasie i przestrzeni) grupa cechowania U(1) jest przyczyna
istnienia fundamentalnego oddziaływania elektromagnetycznego.
Konsekwencją tej niezmienniczości jest bezmasowość fotonu (m=0), fakt, że światło w próżni propaguje się z
prędkością fundamentalną c (nazywaną z powodów historycznych prędkością światła). Następną konsekwencją jest
dalekozasięgowość oddziaływania elektromagnetycznego, potencjał
Zasada zachowania ładunku jest przykładem zasady, która wynika z symetrii różnych od symetrii czasu i przestrzeni.
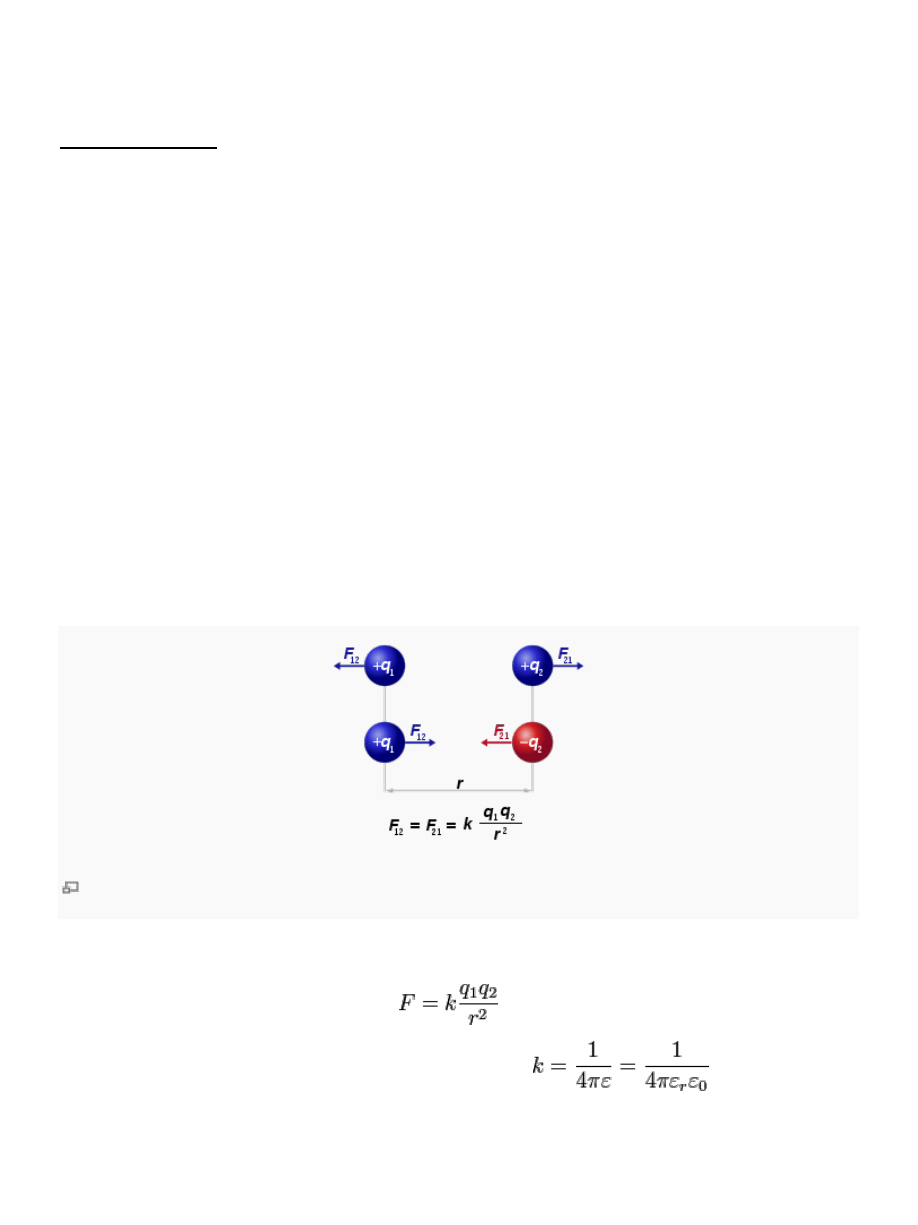
18. Prawo Culomba.
Prawo Coulomba – jedno z podstawowych praw fizyki, opisujące siłę oddziaływania elektrostatycznego ładunków
elektrycznych. Zostało opublikowane w 1785 przez francuskiego fizyka Charlesa Coulomba. Prawo Coulomba mówi,
że siła wzajemnego oddziaływania dwóch punktowych ładunków elektrycznych jest wprost proporcjonalna do iloczynu
tych ładunków i odwrotnie proporcjonalna do kwadratu odległości między nimi.
Historia
W latach 1745–1756 badania siły oddziaływania między okładkami naładowanej butelki lejdejskiej prowadził
gdańszczanin Daniel Gralath
. Nie sformułował on systematycznych zależności ilościowych.
W 1767 Joseph Priestley w książce The History and Present State of Electricity zauważył, że siły elektryczne są
podobne do sił grawitacji
, ale nie rozwinął tego tematu.
Prawdopodobnie pierwszym badaczem, który ilościowo określił siły oddziaływanie między ładunkami był Henry
Cavendish, który w 1771 i 1776 napisał na temat zjawisk elektrycznych duże artykuły dla brytyjskiego Royal
. Prace te nie znalazły szerszego oddźwięku.
W 1785 Charles Coulomb opisał cykl prac, w których posługując się skonstruowaną przez siebie precyzyjną wagą
skręceń określił siły działające pomiędzy ładunkami elektrycznymi.
Sformułowanie skalarne
{kind=link}
Siła F oddziaływania dwóch ładunków punktowych q
1
i q
2
jest wprost proporcjonalna do wielkości każdego z ładunków
i odwrotnie proporcjonalna do kwadratu odległości między nimi r. Można to przedstawić za pomocą wzoru:
,
w którym:
k – współczynnik proporcjonalności wyrażany w układzie SI przez:
gdzie:
ε – przenikalność elektryczna ośrodka;
ε
r
– względna przenikalność elektryczna ośrodka;
ε
0
– przenikalność elektryczna próżni.
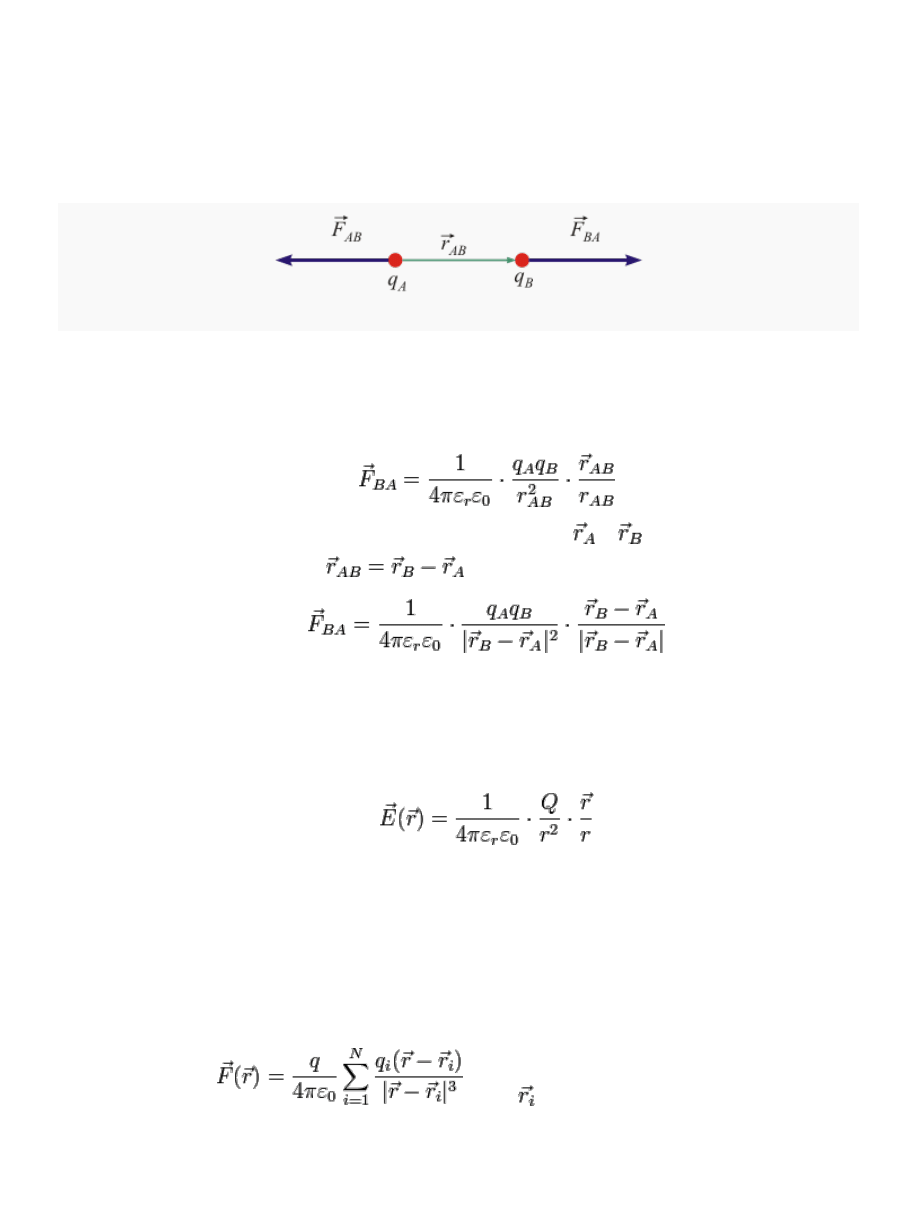
Sformułowanie wektorowe
{kind=link}
Kierunek działania siły oddziaływania ładunków wyznacza prosta przechodząca przez oba te ładunki, natomiast zwrot
określają znaki ładunków. Jeżeli są one jednoimienne, oddziaływanie jest odpychaniem. W przypadku ładunków
różnoimiennych ładunki przyciągają się. Siłę oddziaływania ładunku A na ładunek B można przedstawić wzorem
wektorowym:
gdzie poszczególne wielkości pokazane są na rysunku. Jeżeli przez
i
oznaczymy wektory wodzące
odpowiednio ładunków Q
A
i Q
B
wtedy
i otrzymujemy
Konsekwencje prawa Coulomba
Określona zgodnie z prawem Coulomba siła oddziaływania ładunku Q na inne ładunki w jego sąsiedztwie jest siłą
centralną. Jest również siłą zachowawczą. W otoczeniu ładunku Q można określićpole elektryczne i przypisać mu
natężenie
Prawo Coulomba zostało sformułowane jako prawo doświadczalne, a wielkość wykładnika przy r równa −2 ma
bardzo zasadnicze znaczenie. Jedynie przy jego wielkości równej dokładnie −2 pole elektryczne zanika wewnątrz
sferycznych ładunków i możemy dla niego sformułować prawo Gaussa
. Według aktualnych danych
doświadczalnych wykładnik jest równy −2 z dokładnością co najmniej (2,7±3,1)⋅10
Prawo Coulomba dla układu ładunków punktowych
Z wykorzystaniem zasady superpozycji możemy znaleźć siłę, z którą układ N ładunków punktowych q
i
działa na
ładunek punktowy q:
gdzie
to położenie ładunku q
i
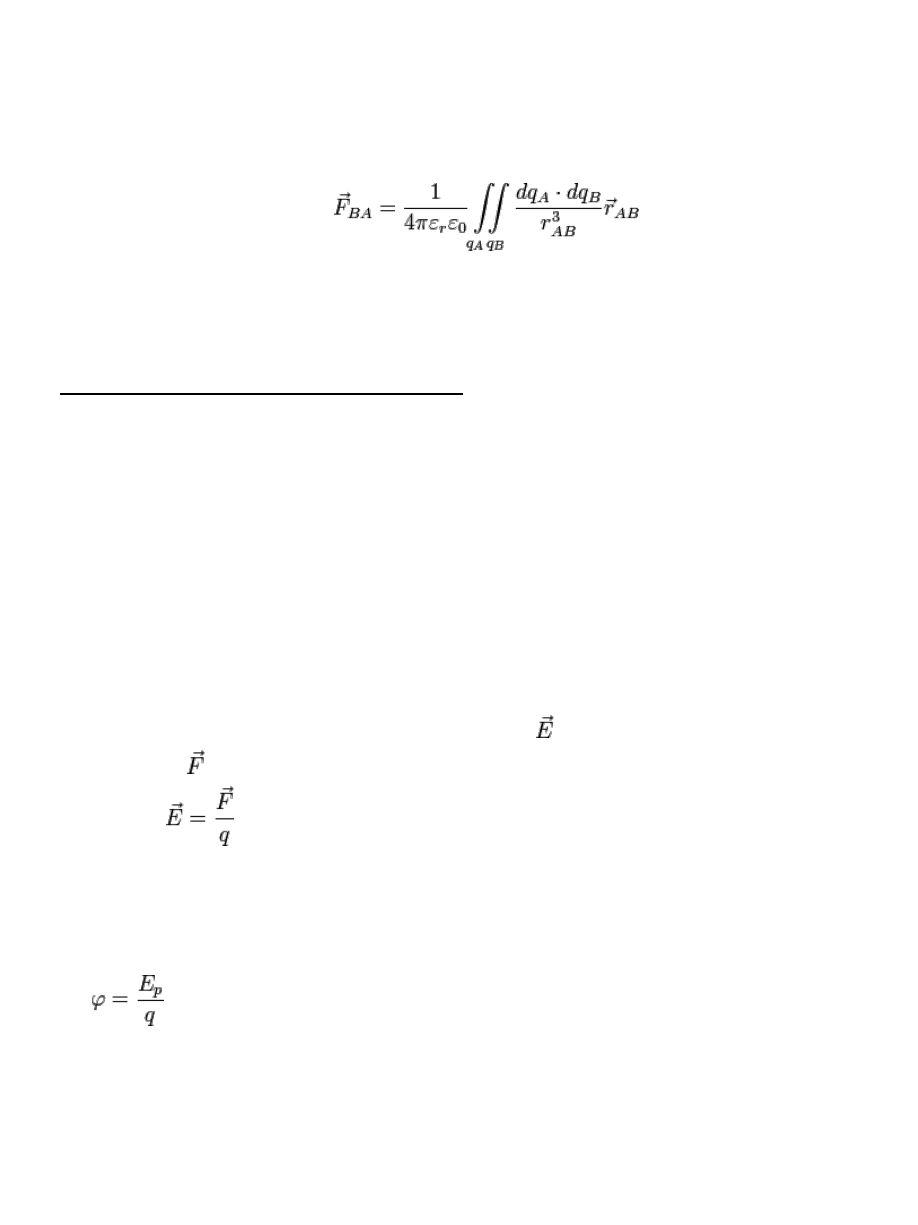
Prawo Coulomba dla ładunków rozciągłych
Prawo Coulomba umożliwia obliczenie siły oddziaływania nie tylko ładunków punktowych, ale również dowolnego
rozkładu ładunków elektrycznych. Obliczenie oddziaływania dwóch ciał o ciągłym rozkładzie ładunków wymaga
całkowania po oddziaływaniach cząstkowych
W szczególnych przypadkach, dla ciał o symetrycznym rozkładzie ładunku, wzór na siłę oddziaływania staje się
prostszy. W szczególności, dla symetrii sferycznej (np. kula, sfera, centralnie wydrążona kula, kula o gęstości
ładunku zmieniającym się radialnie) wzór ten jest taki sam jak dla dwóch ładunków punktowych
19. Pole elektryczne. Wielkości je charakteryzujące.
Pole elektryczne – stan przestrzeni otaczającej ładunki elektryczne lub zmienne pole magnetyczne. W polu
elektrycznym na ładunek elektryczny działa siła elektrostatyczna. Koncepcję pola elektrycznego wprowadził Michael
Faraday (w połowie XIX wieku) jako opis oddziaływania ładunków elektrycznych. Z biegiem czasu okazało się, że pole
elektryczne ma dużo szersze znaczenie. Ładunek poruszający się wytwarza nie tylko pole elektryczne, ale również pole
magnetyczne. W ogólności oba te pola nie mogą być traktowane oddzielnie, mówi się wtedy o polu
elektromagnetycznym. Podstawowymi prawami opisującymi pole elektromagnetyczne są równania Maxwella.
Nośnikami oddziaływań elektromagnetycznych są fotony.
Wielkości opisujące pole elektryczne
Natężenie pola elektrycznego - jest podstawową wielkością opisującą pole elektryczne (i niekiedy samo jest
nazywane krótko polem elektrycznym). Jest to pole wektorowe
, zdefiniowane w danym punkcie pola jako
stosunek siły
wywieranej przez pole na ładunek próbny q umieszczony w tym punkcie do wartości tegoż
ładunku q:
Ładunek z pomocą którego określa się pole musi być na tyle mały, by nie zmieniać rozkładu ładunków w otaczającej go
przestrzeni.
Potencjał pola elektrycznego - jest polem skalarnym φ, zdefiniowane w każdym punkcie pola elektrycznego jako
stosunek energii potencjalnej E
p
ładunku próbnego q umieszczonego w tym punkcie, do wartości tegoż ładunku q:
Energia pola elektrycznego - W polu elektrycznym zgromadzona jest energia. Jest ona równa pracy potrzebnej do
ułożenia układu ładunków wytwarzających dane pole elektryczne, można więc stwierdzić, że energia potencjalna
układu ładunków jest równoważna energii w wytworzonym przez nie polu elektrycznym.
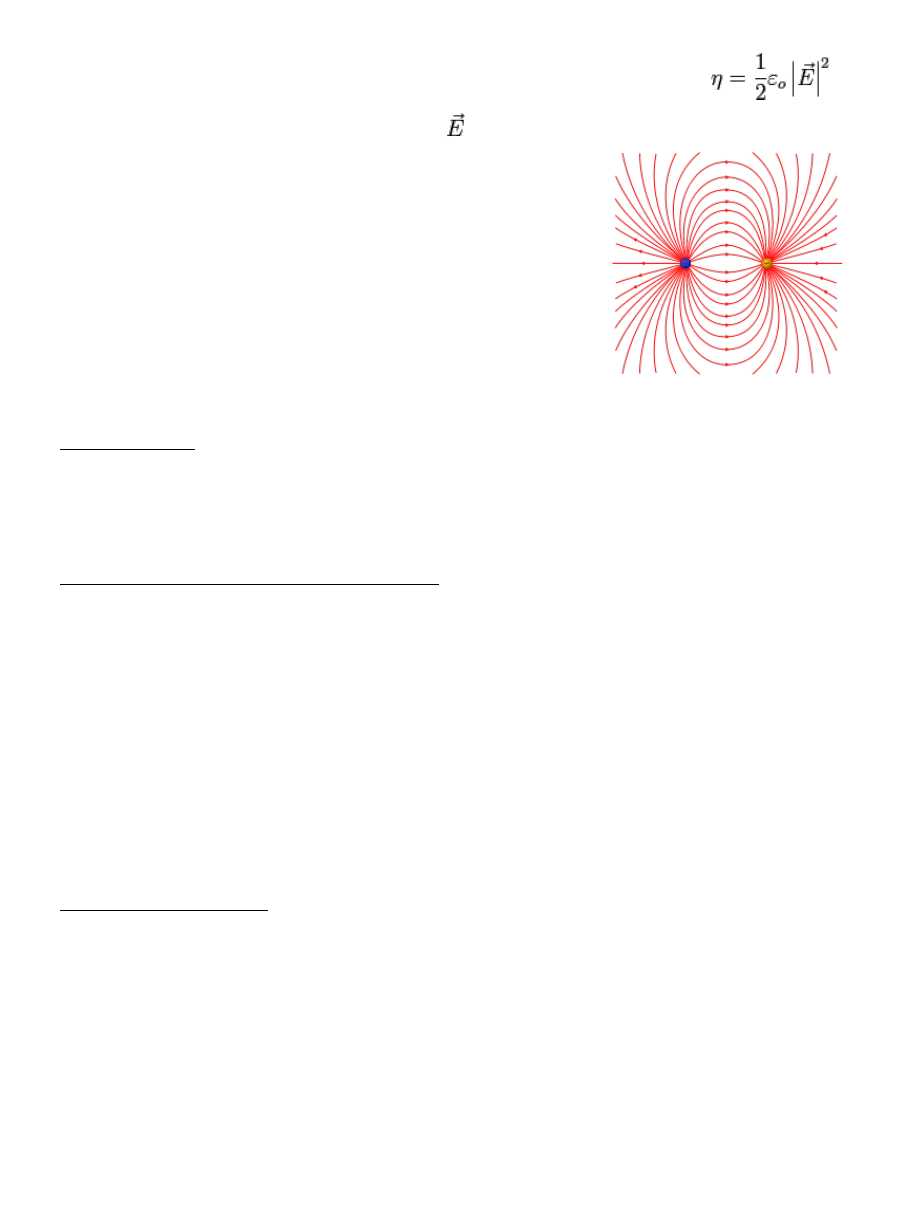
Gęstość energii pola elektrycznego (energia zawarta w jednostce objętości) wyraża się przez:
gdzie: ε
0
- przenikalność elektryczna próżni,
- natężenia pola
elektrycznego.
Linie sił pola elektrycznego - Do obrazowego przedstawienia pola elektrycznego
używa się linii sił pola elektrycznego, są to linie, które w każdym punkcie
przestrzeni są styczne do wektora siły działającej w tym polu na dodatni ładunek
próbny.
Linie sił pola elektrycznego wytworzonego przez dwa ładunki różnych znaków
Właściwości pola elektrycznego
Zasada superpozycji
W ośrodkach jednorodnych i anizotropowych siła pochodzące od kilku pól elektrycznych jest wektorową sumą sił, jakie
wytwarza każde z tych pól. Możliwość sumowania wkładów od wielu pól jest dziedziczona przez wielkości opisujące
pole elektryczne, takie jak natężenie pola elektrycznego, czy jego potencjał.
Zachowawczość pola elektrycznego (Siła zachowawcza).
Siły elektryczne wytworzone przez spoczywające lub poruszające się ruchem jednostajnym ładunki, są zachowawcze,
czyli praca wykonana przy przesunięciu ładunku w polu elektrycznym na drodze zamkniętej jest równa zeru. Często
krótko nazywa się zachowawczym samo pole elektryczne ładunków spoczywających zwane polem elektrostatycznym.
Wynikiem zachowawczości pola elektrycznego jest jego
Potencjalność, czyli istnienie energii potencjalnej i potencjału.
Obie te cechy są matematycznie równoważne z zachowawczością. Pole elektryczne wytworzone przez zmieniające się
pole magnetyczne nie jest zachowawcze i powinno być rozpatrywane wspólnie z polem magnetycznym jako pole
Źródłowość pola elektrycznego
Pole elektryczne wytworzone przez ładunki elektryczne jest polem źródłowym, linie sił tego pola rozpoczynają się i
kończą na ładunkach. Matematycznym wyrazem źródłowości pola elektrycznego jest prawo Gaussa.
8. Zasady zachowania w mechanice.
Siły zachowawcze
Jeśli praca siły po drodze zamkniętej nie równa się zeru, to siła ta jest dyssypatywna (rozpraszająca).
Praca siły zachowawczej nie zależy od drogi, a tylko od położenia punktu początkowego i końcowego.

Zasada zachowania pędu – prawo zachowania pędu
Zasada zachowania energii mechanicznej - Prawo zachowania energii
Wyszukiwarka
Podobne podstrony:
Fizyka pytania na egzamin
Fizyka pytania na egzamin
Fizyka - pytania na egzamin cz. 2, PWSTE Jarosław, Budownictwo, Fizyka
pytania na egzamin fizyka
Pytania na egzamin z fizyki, BUDOWNICTWO, Inżynierka, semestr 2, Fizyka
Pytania na egzamin inżynierski, Fizyka
Bof pytania na egzamin, PK, Budownictwo ogółne i fizyka budowli, zaliczenie, BOF (Fizyka Budowli) T.
~$ronaRUDA PYTANIA NA EGZAMIN DYPLOMOWY całość bez 2 doc
Medycyna Katastrof pytania na egzamin (opracowane)
Długi pytania na egzamin, PWTRANSPORT, semIII, Elektrotechnika II
zoologia pytania na egzamin, Leśnictwo, zoologia
pytania na egzamin, zarządzanie przedsięwzięciami budowlanymi
1.Rodzaje i geneza gruntów budowlanych, Opracowane pytania na egzamin
testy 2000 m rodz, pytania na egzamin medycyne, LEP , PES
pytania na egzamin PWR, PWSZ, SEMESTR 3, PODSTAWY MARKETINGU
Pedagogika ogĂllna pytania na egzamin
Pytania na egzamin nowa podstawa programowa, sem I
więcej podobnych podstron