Analiza kinematyczna i kinetostatyczna mechanizmu dźwigniowego
Mechanizm suwakowy. Zadanie 6B
1. Synteza strukturalna i geometryczna mechanizmu
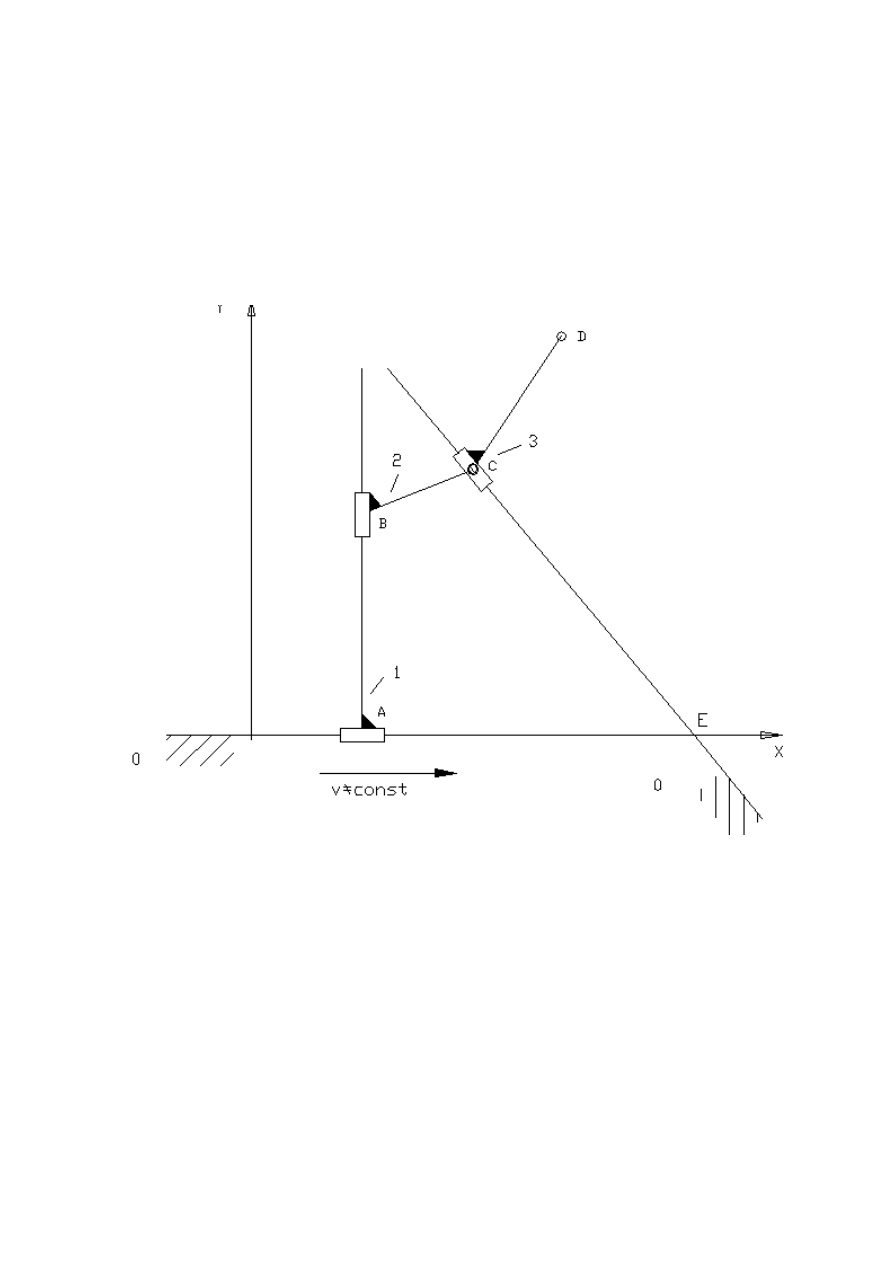
Schemat kinematyczny mechanizmu
Dane mechanizmu:
A=(250,0)
B=(250,500)
C=(500,600)
D=(700,900)
E=(1000,0)
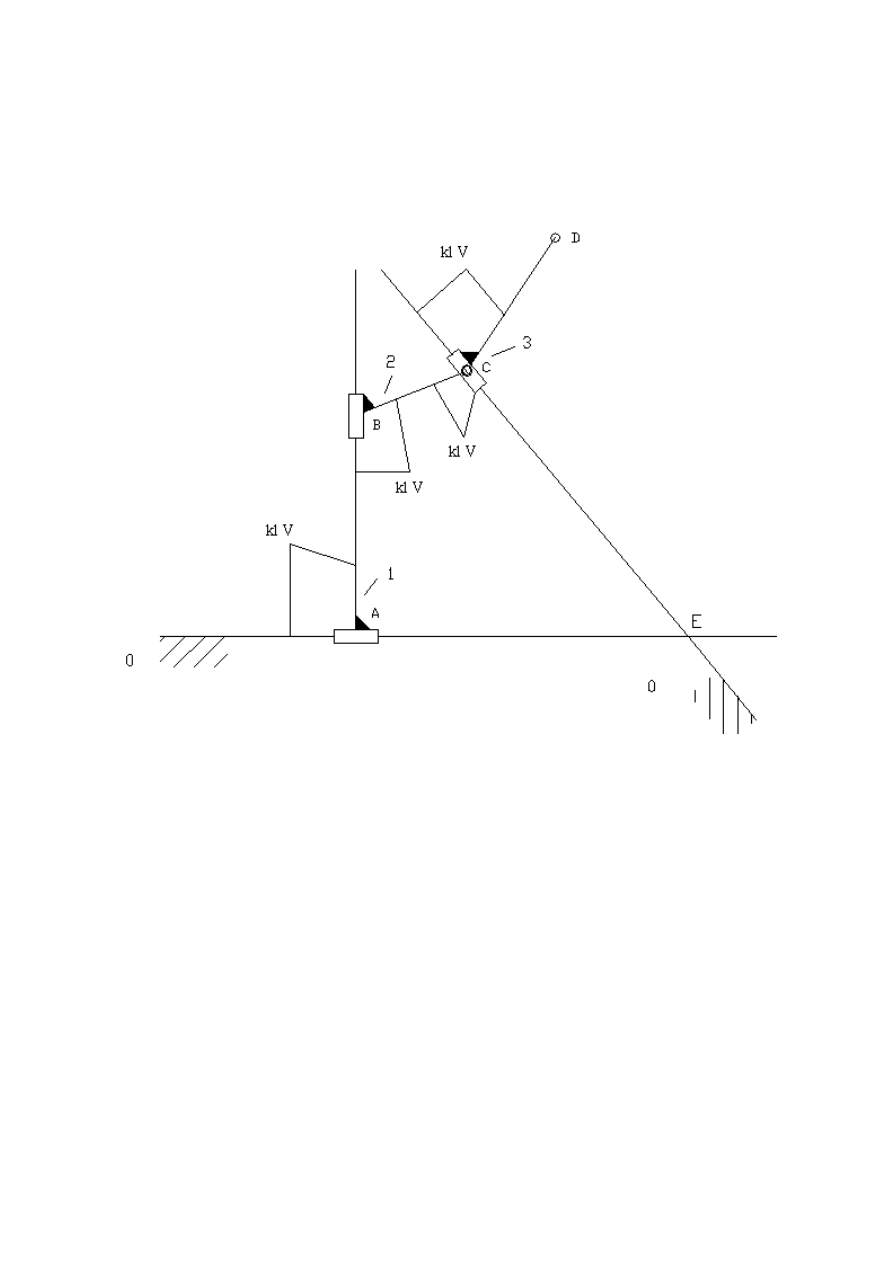
Wyznaczenie ruchliwości i klasy mechanizmu:
Ruchliwość mechanizmu płaskiego obliczamy ze wzoru:
w
=3⋅n – 2⋅p
v
− p
iv
n-liczba członów ruchomych mechanizmu
W tym przypadku:
n
=3
p
v
=4
p
iv
=0
w
=3⋅3 – 2⋅4 – 0=1
Ruchliwość tego mechanizmu wynosci 1.
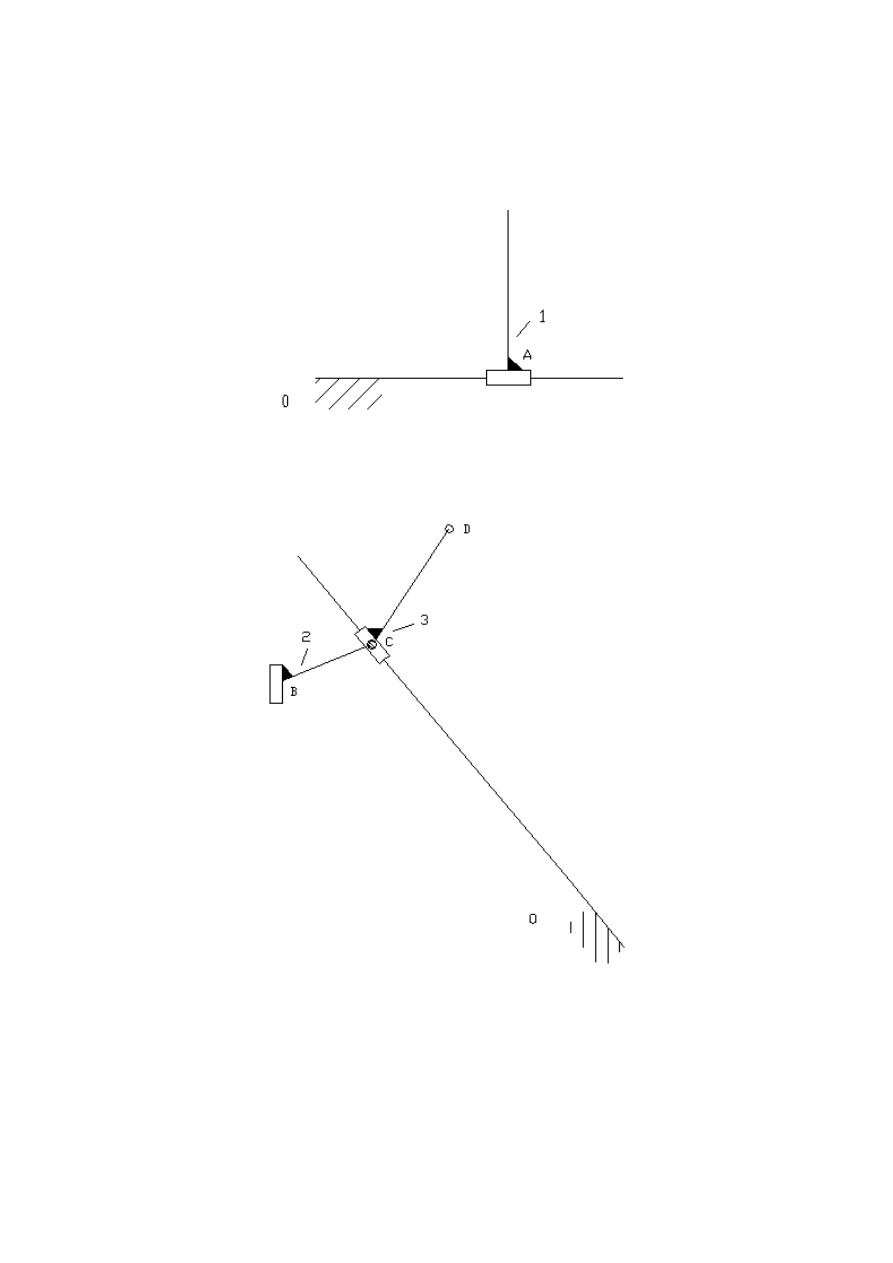
Podział mechanizmu na grupy strukturalne:
-człon napędzający
-grupa strukturalna
N
=2
p
v
=3
w
gr
=3⋅2 – 2⋅3=0
Ruchome człony mechanizmu ( 2 i 3 ) tworzą grupę strukturalną klasy II
Wyszukiwarka
Podobne podstrony:
6B tmm1 analiza
6b Kwiatek Analiza zagrozen i ryzyka SSP 11 dnia 20.02.2010, specjalizacja mięso
Metodologia badań z logiką dr Izabela Krejtz wykład 6b Wprowadzenie do analizy regresji
analiza złożonych aktów ruchowych w sytuacjach patologicznych
Prezentacja 2 analiza akcji zadania dla studentow
Wypadkoznawstwo analiza wypadków
Zarz[1] finan przeds 11 analiza wskaz
Analiza czynnikowa II
4 ANALIZA WSKAŹNIKOWA Rachunkowość
analiza finansowa ppt
Analiza rys w twarzy
Analiza rynku konsumentów
Analiza
ANALIZA KOSZTU BIOLOGICZNEGO WYKONYWANEJ PRACY
Analiza genetyczna w medycynie sądowej
więcej podobnych podstron