- 1 -
Liniowe stabilizatory napi
ę
cia i pr
ą
du
1.
Wst
ę
p
Stabilizatory dzieli si
ę
według zasady działania na stabilizatory parametryczne oraz
kompensacyjne tzn. ze sprz
ęż
eniem zwrotnym. Stabilizatory kompensacyjne dzieli si
ę
na układy o
działaniu ci
ą
głym oraz o działaniu impulsowym. W obydwu tych grupach wyró
ż
nia si
ę
stabilizatory
szeregowe i równoległe. Stabilizatory parametryczne stosowane s
ą
w przypadku małych mocy
wyj
ś
ciowych lub jak stabilizatory pomocnicze. Cechuj
ą
si
ę
one mał
ą
sprawno
ś
ci
ą
, niezbyt dobrymi
parametrami oraz brakiem mo
ż
liwo
ś
ci regulacji stabilizowanego napi
ę
cia lub pr
ą
du wyj
ś
ciowego.
Parametry liniowego stabilizatora kompensacyjnego, a zwłaszcza sprawno
ść
, s
ą
znacznie lepsze ni
ż
stabilizatora parametrycznego.
Niniejsze
ć
wiczenie ma charakter projektowo-do
ś
wiadczalny i jego celem jest wykształcenie
umiej
ę
tno
ś
ci samodzielnego projektowania i realizacji praktycznej kompensacyjnych stabilizatorów o
działaniu ci
ą
głym w postaci aplikacji wybranych popularnych układów scalonych.
2.
Wprowadzenie. Stabilizatory kompensacyjne o pracy ci
ą
głej.
Zadaniem stabilizatorów napi
ę
cia lub pr
ą
du stałego jest dostarczenie do obci
ąż
enia
stabilizowanego napi
ę
cia lub pr
ą
du, którego warto
ść
w bardzo małym stopniu b
ę
dzie zale
ż
ała od
takich czynników jak zmieniaj
ą
ce si
ę
:
-
napi
ę
cie wej
ś
ciowe
U
I
±
∆
U
I
-
rezystancja obci
ąż
enia
R
L
±
∆
R
L
-
temperatura otoczenia
T
±
∆
T
oraz innych czynników zewn
ę
trznych, takich jak zmiany ci
ś
nienia i wilgotno
ś
ci powietrza
atmosferycznego, oraz odporno
ść
na działanie czynników chemicznych, a branych pod uwag
ę
wył
ą
cznie w zastosowaniach specjalnych.
Jednak wpływ wymienionych czynników zewn
ę
trznych oraz temperatury na warto
ś
ci
stabilizowanych napi
ęć
i pr
ą
dów wyj
ś
ciowych jest zazwyczaj do pomini
ę
cia w stosunku do zmian
wpływu napi
ę
cia wej
ś
ciowego i obci
ąż
enia w szczególno
ś
ci w scalonych stabilizatorach napi
ę
cia i
pr
ą
du. Mo
ż
na wówczas powiedzie
ć
,
ż
e napi
ę
cie wyj
ś
ciowe U
O
lub pr
ą
d wyj
ś
ciowy I
O
jest w głównej
mierze funkcj
ą
napi
ę
cia zasilaj
ą
cego U
I
i obci
ąż
enia R
L
(
)
(
)
L
I
O
L
I
O
R
U
f
I
R
U
f
U
,
,
=
=
(2.1)
Ró
ż
niczki zupełne tych funkcji maj
ą
te
ż
posta
ć
O
O
O
I
I
O
O
O
O
O
I
I
O
O
U
dU
dI
U
dU
dI
dI
I
dI
dU
U
dU
dU
dU
∆
⋅
+
∆
⋅
=
∆
⋅
+
∆
⋅
=
(2.2)
- 2 -
Stabilizator jest dwuwrotnikiem wł
ą
czonym pomi
ę
dzy
ź
ródło niestabilizowanego napi
ę
cia lub
pr
ą
du wej
ś
ciowego a obci
ąż
enie (rys. 2.1.)
R
I
E
I
±
∆
E
I
Stabilizator
U
I
±
∆
U
I
I
o
±
∆
I
o
I
I
±
∆
I
I
U
o
±
∆
U
o
R
L
Rys. 2.1. Stabilizator w warunkach roboczych.
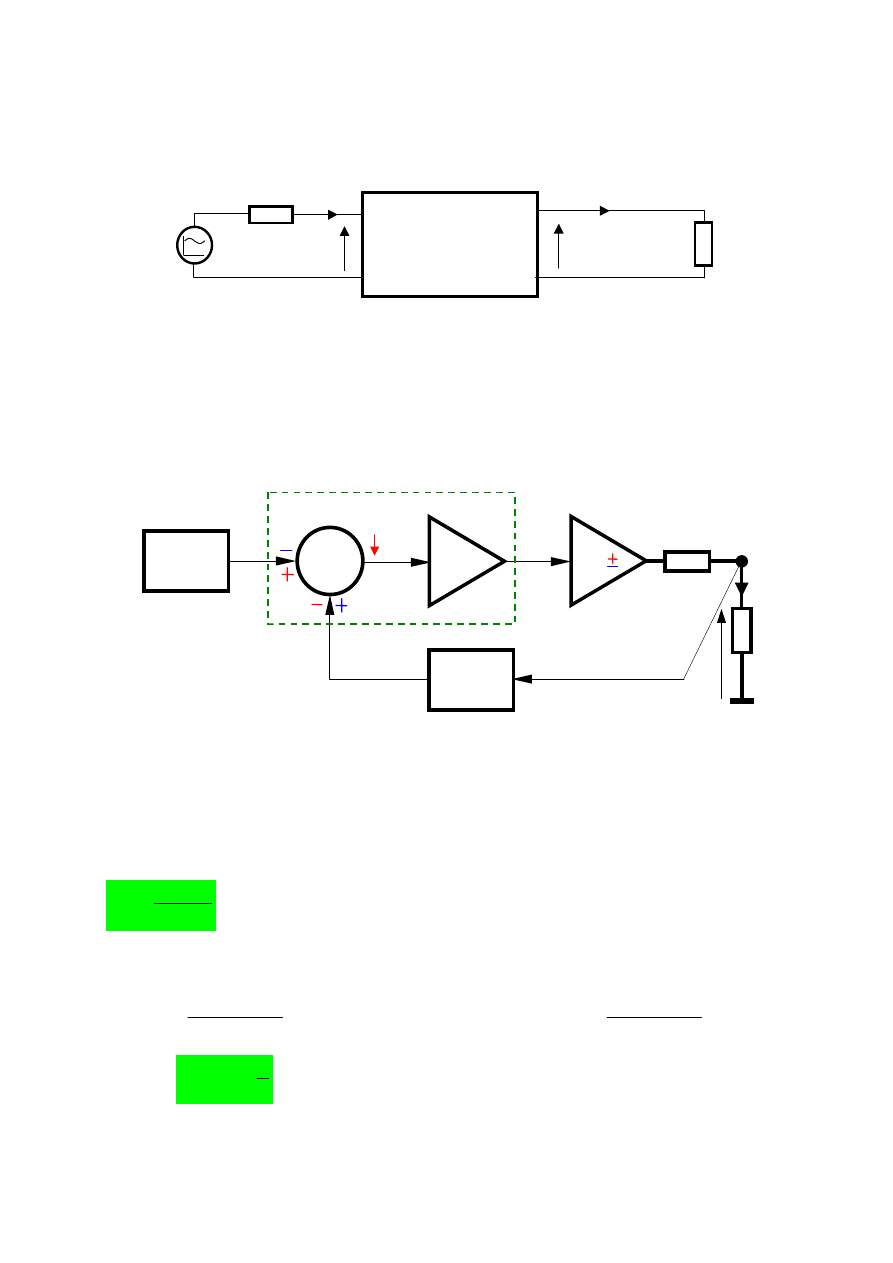
Rozwa
ż
ane w
ć
wiczeniu stabilizatory sterowane o działaniu ci
ą
głym (Kompensacyjne) działaj
ą
dzi
ę
ki regulacji stałopr
ą
dowej rezystancji elementu regulacyjnego (Tranzystora) sygnałem zwrotnym,
uzale
ż
nionym od ró
ż
nicy napi
ę
cia lub pr
ą
du wyj
ś
ciowego i napi
ę
cia odniesienia (Referencyjnego).
Ta ogólna zasada działania sterowanych stabilizatorów została pokazana na poni
ż
szym rysunku.
Ź
ródło napi
ę
cia
odniesienia
U
REF
γγγγ
ΣΣΣΣ
Wzmacniacz
bł
ę
du
K
U
Wzmacniacz pr
ą
du
stałego
K
U
= 1
R
L
R
O
O
G
m
=
I
o
/(K
U
⋅
U
B
)
I
o
U
o
Napi
ę
cie
Bł
ę
du
U
B
Rys. 2.2. Schemat blokowy i zasada działania stabilizatora kompensacyjnego
Na podstawie schematu blokowego stabilizatora z rys. 2.2, zgodnie z teori
ą
sprz
ęż
enia
zwrotnego, mo
ż
na zapisa
ć
nast
ę
puj
ą
ce wyra
ż
enia opisuj
ą
ce:
Rezystancj
ę
wyj
ś
ciow
ą
-
R
ƒƒƒƒ
O
γ
U
O
fO
K
R
R
+
=
1
(2.3)
Napi
ę
cie na wyj
ś
ciu stabilizatora -
U
O
L
m
U
L
m
U
REF
O
R
G
K
R
G
K
U
U
γ
+
=
1
, je
ś
li przyjmiemy,
ż
e K
U
→
∞
, czyli
+
∞
→
L
m
U
L
m
U
REF
K
R
G
K
R
G
K
U
U
γ
1
lim
,
wówczas
γ
1
REF
O
U
U
=
(2.4)
- 3 -
W przypadku stabilizatora pr
ą
du w układzie jak na rys.2.2, wyra
ż
enie opisuj
ą
ce zale
ż
no
ść
pr
ą
du stabilizowanego
I
O
na wyj
ś
ciu ma posta
ć
O
m
U
m
U
REF
O
R
G
K
G
K
U
I
γ
+
=
1
, je
ś
li równie
ż
przyjmiemy,
ż
e K
U
→
∞
, a wi
ę
c
+
∞
→
O
m
U
m
U
REF
K
R
G
K
G
K
U
U
γ
1
lim
,
wówczas
O
REF
O
R
U
I
γ
1
=
(2.5)
Zale
ż
no
ść
jest prawdziwa dla napi
ę
cia U
REF
b
ę
d
ą
cego w tym układzie napi
ę
ciem odniesienia
wzgl
ę
dem potencjału punktu „O”
W praktycznej realizacji układowej stabilizatora blok K
U
i
ΣΣΣΣ
zgodnie z rys. 2.2
(linia przerywana), stanowi napi
ę
ciowy wzmacniacz ró
ż
nicowy lub operacyjny z wej
ś
ciem
symetrycznym.
R
L
U
O
U
I
I
O
U
O
U
I
I
O
R
fO
(U
I
-U
O
) -
DROPOUT
I
Zakres
przeci
ąż
enia
Zakres stabilizacji
Stabilizator
∆
I
O
∆
U
O
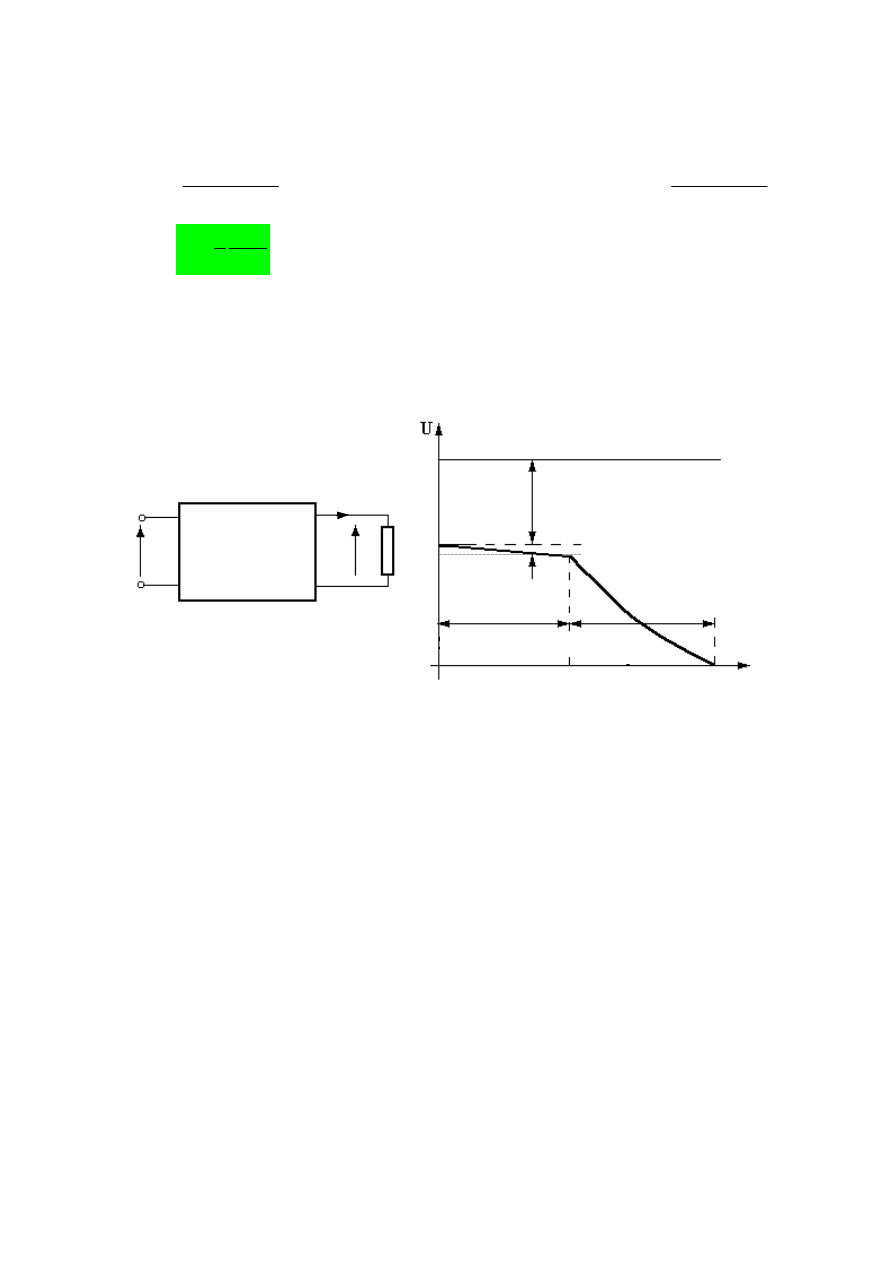
Rys. 2.3. Charakterystyka wyj
ś
ciowa stabilizatora napi
ę
cia w warunkach roboczych.
Podstawowe parametry stabilizatora s
ą
zwi
ą
zane z jego charakterystyk
ą
wyj
ś
ciow
ą
obrazuj
ą
c
ą
zale
ż
no
ść
napi
ę
cia wyj
ś
ciowego U
O
od pr
ą
du obci
ąż
enia I
O
(przy stałym napi
ę
ciu
wej
ś
ciowym U
I
). W typowej charakterystyce stabilizatora wyodr
ę
bnia si
ę
-
zakres stabilizacji (normalnej pracy)
-
zakres przeci
ąż
enia
W zakresie przeci
ąż
enia wyst
ę
puje znaczna zale
ż
no
ść
napi
ę
cia od pr
ą
du, tzn. zanikaj
ą
wła
ś
ciwo
ś
ci
stabilizuj
ą
ce układu, ponadto mo
ż
e znacznie powi
ę
kszy
ć
si
ę
moc wydzielana w szeregowym
elemencie regulacyjnym, co grozi jego uszkodzeniem. Obecnie stosuje si
ę
cz
ę
sto układy dodatkowe
modyfikuj
ą
ce charakterystyk
ę
U
O
(I
O
) w taki sposób,
ż
e poza zakresem stabilizacji moc wydzielana w
układzie stabilizatora nie powi
ę
ksza si
ę
w ogóle lub powi
ę
ksza si
ę
umiarkowanie (
FoldBack
lub
Safe Operation Area Protection Circuit
) - rys. 3.4.
Podstawowe parametry stabilizatora to:
U
0
– nominalne ( znamionowe ) napi
ę
cie stabilizacji
U
REF
– napi
ę
cie odniesienia ( dioda zenera,
ź
ródło typu band-gap, przetwornik C/A )
I
0max
,
I
K
– maksymalny pr
ą
d wyj
ś
ciowy w zakresie stabilizacji

- 4 -
I
z
– pr
ą
d zwarcia
S
U
=
∆∆∆∆
U
I
/
∆∆∆∆
U
O
– współczynnik stabilizacji napi
ę
cia od zmian napi
ę
cia wej
ś
ciowego
S
RL
=
∆∆∆∆
U
O
/ U
O
– współczynnik stabilizacji napi
ę
cia od zmian obci
ąż
enia
R
fO
= |
∆∆∆∆
U
O
/
∆∆∆∆
I
O
|
– rezystancja wyj
ś
ciowa
ηηηη
= (U
O
I
O
)/(U
I
I
I
)
– sprawno
ść
energetyczna
(U
I
- U
O
)
min
– minimalna ró
ż
nica napi
ęć
pomi
ę
dzy wej
ś
ciem i wyj
ś
ciem niezb
ę
dna
do stabilizacji napi
ę
cia wyj
ś
ciowego w warunkach pełnych zmian obci
ąż
enia ( DropOut )
(U
I
- U
O
)
max
– maksymalna ró
ż
nica napi
ęć
pomi
ę
dzy wej
ś
ciem i wyj
ś
ciem nie powoduj
ą
ca
zniszczenia elementu regulacyjnego w warunkach pełnego obci
ąż
enia
R
O,
R
S
– rezystancja wyj
ś
ciowa stabilizatora z otwart
ą
p
ę
tl
ą
sprz
ęż
enia zwrotnego, rezystancja
szeregowa „próbkuj
ą
ca” zmiany napi
ę
cia wywołane zmianami pr
ą
du obci
ąż
enia
R
L
– rezystancja obci
ąż
enia
G
m
– transkonduktancja elementu regulacyjnego ( tranzystora mocy, wzmacniacza pr
ą
dowego )
definiowana jako
I
c
/U
be
, I
D
/U
gs
γγγγ
– współczynnik sprz
ęż
enia ( zwrotnego podziału napi
ę
cia – pr
ą
du wyj
ś
ciowego wzgl
ę
dem
napi
ę
cia odniesienia ), decyduje o warto
ś
ci napi
ę
cia lub pr
ą
du stabilizowanego na wyj
ś
ciu
3.
Rozwi
ą
zania układowe i projektowanie kompensacyjnych stabilizatorów liniowych.
Zgodnie z rys. 2.2, na którym przedstawiono ogólny schemat blokowy stabilizatora
kompensacyjnego, stabilizatory mo
ż
emy podzieli
ć
ze wzgl
ę
du na rodzaj ujemnego sprz
ęż
enia
zwrotnego, a wi
ę
c sposób jego realizacji b
ą
d
ź
za pomoc
ą
wzmacniacza bł
ę
du (sygnał zwrotny
podawany jest na wej
ś
cie ró
ż
nicowe ze znakiem minus „
−−−−
”, natomiast element regulacyjny pracuje w
układzie OC lub OD) - układy klasyczne, b
ą
d
ź
za pomoc
ą
inwertera w postaci elementu regulacyjnego
(sygnał zwrotny podawany jest na wej
ś
cie ró
ż
nicowe ze znakiem minus „
+
”, natomiast element
regulacyjny pracuje w układzie OE lub OS) - układy o małym spadku napi
ę
cia pomi
ę
dzy wej
ś
ciem i
wyj
ś
ciem (
Low DropOut
). Podziału stabilizatorów dokonuje si
ę
równie
ż
ze wzgl
ę
du na sposób
sterowania za pomoc
ą
elementu regulacyjnego jak to pokazano na rys. 3.2, z zachowaniem ujemnego
sprz
ęż
enia zwrotnego w p
ę
tli.
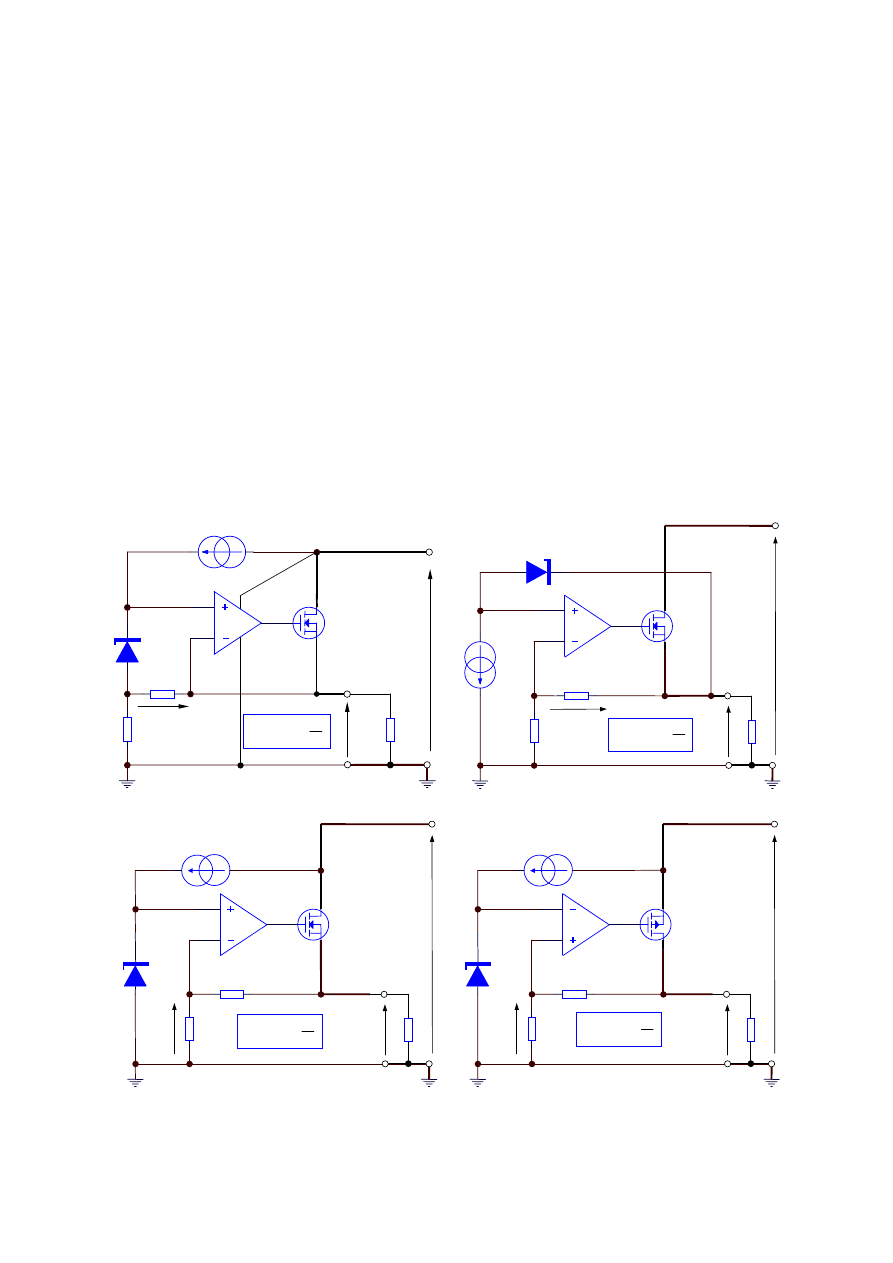
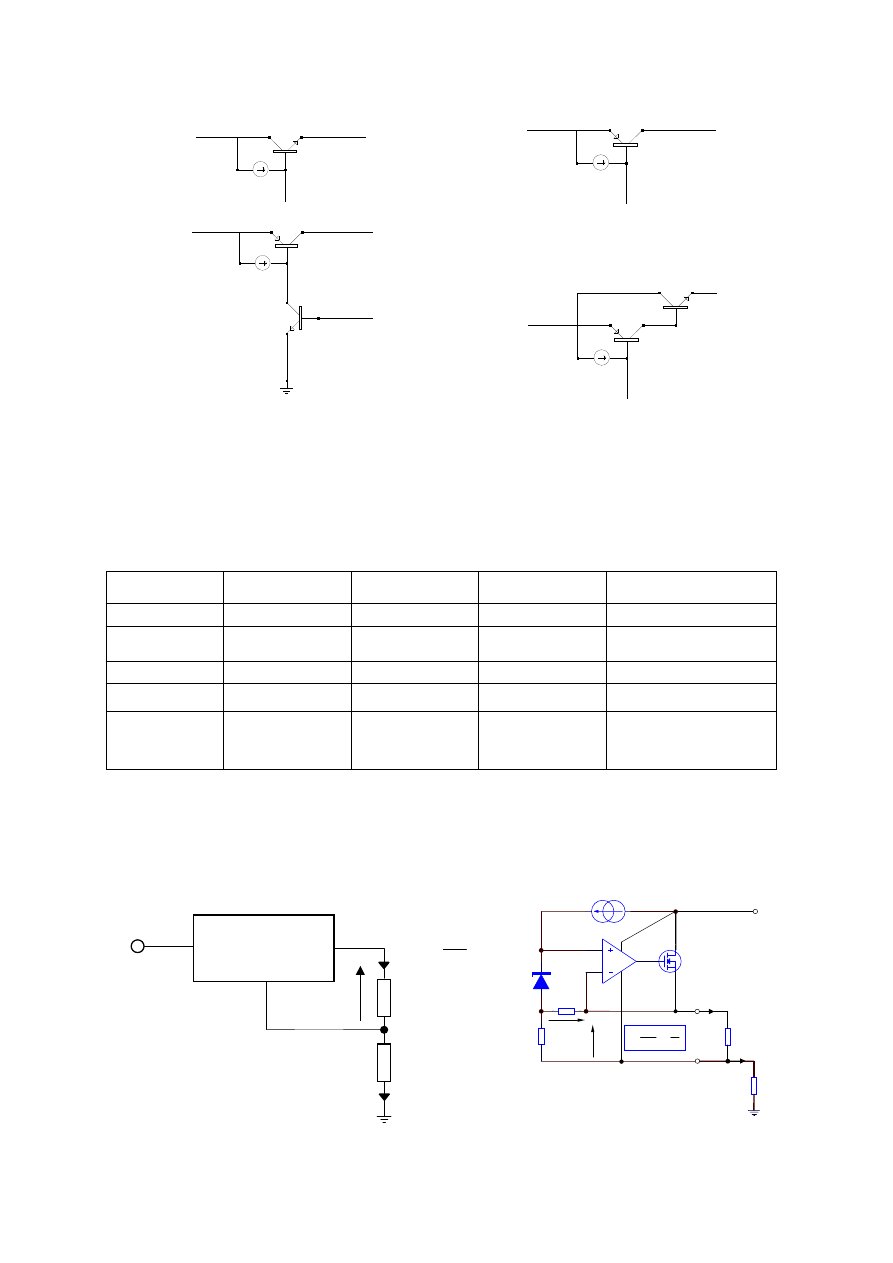
Na rys. 3.1, pokazano najwa
ż
niejsze powszechnie stosowane układy liniowych stabilizatorów
napi
ę
cia realizowane, w postaci monolitycznych układów scalonych, b
ą
d
ź
na elementach dyskretnych
z wykorzystaniem scalonych
ź
ródeł napi
ę
cia odniesienia (np.: 1N821, TL431, LM385, LM399). Układy
stabilizatorów z rys. 3.1 (a) i (b) znalazły szczególne zastosowanie w tzw. 3-ko
ń
cówkowych
programowanych stabilizatorach napi
ę
cia lub pr
ą
du, w których płynn
ą
lub skokow
ą
regulacj
ę
napi
ę
cia
mo
ż
emy uzyska
ć
poprzez zmian
ę
rezystancji R
2
, w zakresie od 0
Ω
do warto
ś
ci przy której ró
ż
nica
(U
I
- U
O
) jest wi
ę
ksza od (U
I
- U
O
)
min
. Dzi
ę
ki „rezystancji programuj
ą
cej R
2
” wł
ą
czonej pomi
ę
dzy mas
ę
a stabilizator mo
ż
liwe jest np. cyfrowe ustalanie napi
ę
cia wyj
ś
ciowego za pomoc
ą
kluczy
tranzystorowych, co ma szczególne zastosowanie w zasilaniu urz
ą
dze
ń
bezpo
ś
rednio sterownych
mikrokontrolerami jednoukładowymi. Nale
ż
y przede wszystkim wymieni
ć
tu kilka popularnych układów
monolitycznych LM78xx, LM317, LM350, MC33269, oraz programowany stabilizator 5-ko
ń
cówkowy
L200 pracuj
ą
cy w układzie jak na rys. 3.1 (c), w którym płynn
ą
regulacje napi
ę
cia uzyskuje si
ę
dzi
ę
ki
- 5 -
zmianom warto
ś
ci rezystancji R
1
. Na rys. 3.1 (d) przedstawiono podstawowy układ stabilizatora o
małym spadku napi
ę
cia pomi
ę
dzy wej
ś
ciem i wyj
ś
ciem (stabilizator LDO). Poza wymienionym
„dedykowanymi” układami liniowych stabilizatorów, produkowane s
ą
równie
ż
tzw. uniwersalne
monolityczne stabilizatory napi
ę
cia lub pr
ą
du, zawieraj
ą
ce: (i) skompensowane
ź
ródło napi
ę
cia
odniesienia, (ii) wzmacniacz bł
ę
du i (iii) układ zabezpieczenia nad pr
ą
dowego, b
ą
d
ź
stabilizator pr
ą
du
w postaci dodatkowego wzmacniacza - komparatora. Nale
ż
y tu w szczególno
ś
ci wymieni
ć
popularny
stabilizator monolityczny uA723. W oparciu o układy scalonych stabilizatorów uniwersalnych,
realizowane s
ą
najcz
ęś
ciej, układy stabilizatorów pokazane na rys. 3.1 (c) i (d). W celu realizacji
aplikacji układu stabilizatora ze stabilizatorem uniwersalnym najcz
ęś
ciej konieczne jest zastosowanie
zewn
ę
trznego dyskretnego tranzystora mocy BJT lub MOSFET jako elementu regulacyjnego.
Przyjmuj
ą
c,
ż
e blok
γγγγ
zgodnie z rys. 2.2, stanowi zewn
ę
trzny dzielnik napi
ę
cia R
1
, R
2
w
układach jak na rys. 3.1, mo
ż
emy zapisa
ć
odpowiednie wyra
ż
enia zgodnie ze wzorem (2.4), opisuj
ą
ce
zale
ż
no
ść
stabilizowanego napi
ę
cia wyj
ś
ciowego U
O
od napi
ę
cia odniesienia U
REF
. Zale
ż
no
ś
ci te
podano na schematach poszczególnych układów stabilizatorów.
a)
b)
0
R
1
0
T
IRF540
R
2
R
L
U
REF
I
s
U
I
U
o
U
REF
+
=
1
2
1
R
R
U
U
REF
O
0
R
1
0
T
IRF540
R
2
Is
U
REF
U
o
R
L
U
I
U
REF
+
=
1
2
1
R
R
U
U
REF
O
c)
d)
0
R
1
0
T
IRF540
R
2
Is
U
REF
U
o
R
L
U
I
U
REF
+
=
2
1
1
R
R
U
U
REF
O
0
R
1
0
T
IRF9540
R
2
Is
U
REF
U
o
R
L
U
I
U
REF
+
=
2
1
1
R
R
U
U
REF
O
Rys. 3.1. Podstawowe układy liniowych kompensacyjnych stabilizatorów napi
ę
cia. (a), (b) i (c) układy stabilizatorów
wtórnikowych, oraz (d) stabilizator typu LDO.
- 6 -
A
Q1
1
B
Q1
1
C
Q1
1
Q2
D
Q1
1
Q3
Rys. 3.2. Elementy regulacyjne - podstawowe sposoby sterowania wyj
ś
ciem stabilizatora.
W tabeli 3.1, zestawiono własno
ś
ci poszczególnych układów sterownia elementami
regulacyjnymi i elementów regulacyjnych pokazanych na rys. 3.2, w układach kompensacyjnych
stabilizatorów liniowych.
Tabel. 3.1 Podstawowe własno
ś
ci układów sterowania elementami regulacyjnymi z rys. 3.2.
Układ sterowania
A
B
C
D
U
DROPOUT [min]
> U
BE
U
CEsat
< 0.2V
U
CEsat
< 0.2V
U
CEsat PNP
+ U
BE NPN
< 1.5V
Impedancja
wyj
ś
ciowa
Niska
Wysoka
Wysoka
Wysoka
Pasmo
Szerokie
W
ą
skie
W
ą
skie
W
ą
skie
Stabilno
ść
Bezwzgl
ę
dna
Warunkowa
zale
ż
na od C
L
Warunkowa
zale
ż
na od C
L
Warunkowa
zale
ż
na od C
L
Rodzaj
sterowania
obci
ąż
eniem
Wtórnik
Inwerter
Podwójny
Inwerter
Inwerter
Stabilizator pr
ą
du w najprostszy sposób mo
ż
na zrealizowa
ć
, poprzez wykorzystanie
istniej
ą
cego ju
ż
3-ko
ń
cówkowego stabilizatora napi
ę
cia, w którym pomi
ę
dzy wyj
ś
cie, a mas
ę
stabilizatora (ko
ń
cówka
GND
lub
ADJ
) wł
ą
czony jest rezystor R
O
lub R
S
próbkuj
ą
cy przepływaj
ą
cy
pr
ą
d jak to pokazano na rys. 3.3.
Stabilizator U
o
ADJ
R
O
R
L
I
O
= const
U
o
O
O
O
R
U
I
=
R
1
0
T
R
2
R
O
U
REF
I
s
U
o
U
REF
+
=
1
2
1
R
R
R
U
I
O
REF
O
I
o
I
o
R
L
Rys. 3.3. Układ stabilizatora pr
ą
du (a) z wykorzystaniem stabilizatora napi
ę
cia, (b) ideowy schemat równowa
ż
ny.
- 7 -
Rozwi
ą
zanie to umo
ż
liwia w prosty sposób realizacj
ę
stabilizatorów pr
ą
du z wykorzystaniem topologii
układowych z rys. 3.1 (a) i (b) scalonych 3-ko
ń
cówkowych stabilizatorów napi
ę
cia. W przypadku
układów stabilizatorów, w których napi
ę
cie odniesienia U
REF
podł
ą
czone jest pomi
ę
dzy „mas
ę
” układu
scalonego i wej
ś
cie wzmacniacza bł
ę
du (rys. 3.1 (c)) jak przypadku układów L200, czy stabilizatora
uniwersalnego uA723, najcz
ęś
ciej w celu zabezpieczenia nad pr
ą
dowego lub przej
ś
cia układu w
stabilizacj
ę
pr
ą
du stosuje si
ę
dodatkowy układ ze wzmacniaczem bł
ę
du w posta
ć
pojedynczego
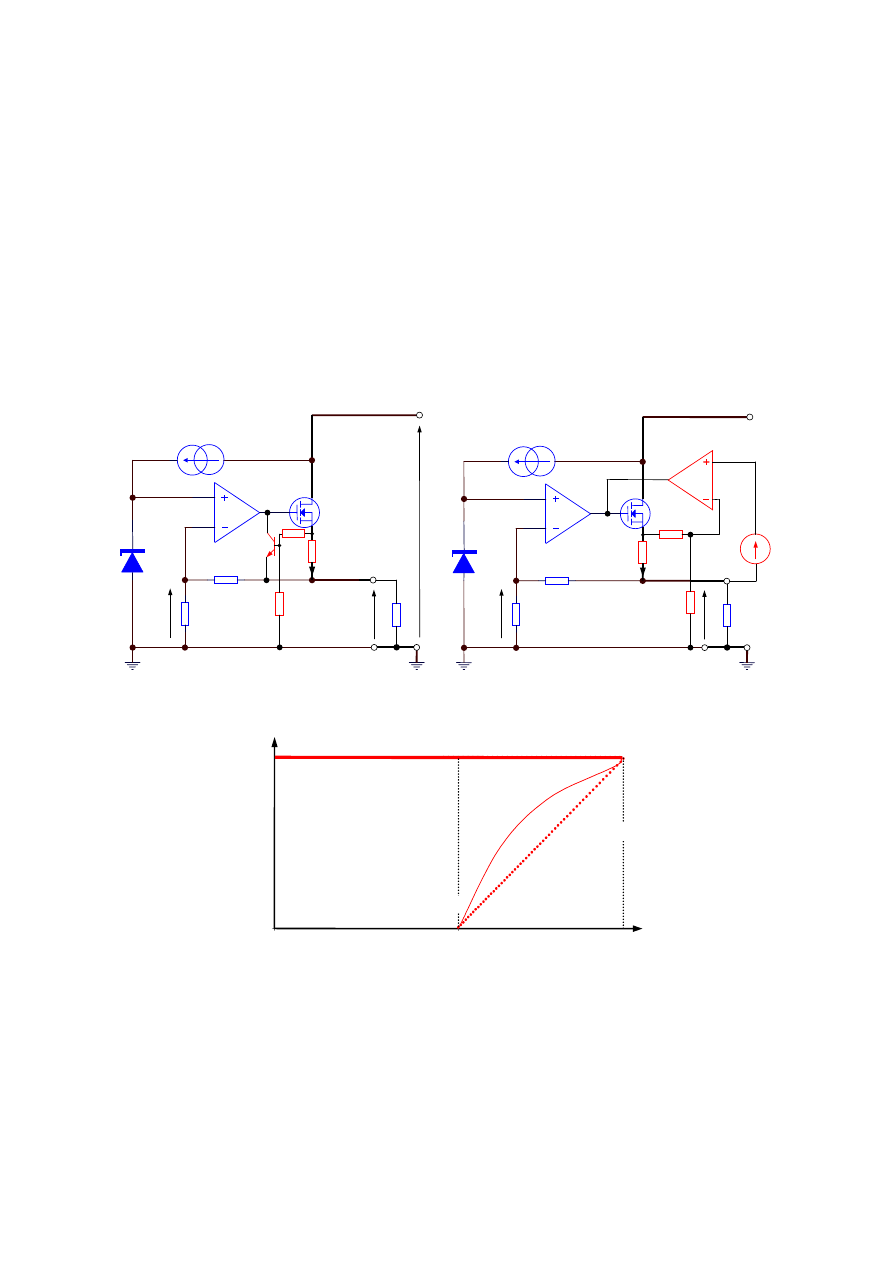
tranzystora lub WO. Na rys. 3.4, pokazano dwa równowa
ż
ne sposoby realizacji układów stabilizacji
pr
ą
du w których uzyskuje si
ę
zmniejszenie pr
ą
du obci
ąż
enia przy zmniejszeniu rezystancji obci
ąż
enia
(
FoldBack
), a wi
ę
c o charakterystyce jak na rys. 3.5. W układzie tym w odró
ż
nieniu od klasycznych
stabilizatorów pr
ą
du, poza rezystorem pomiarowym R
O
znajduje si
ę
dodatkowy dzielnik napi
ę
cia
zbudowany na rezystorach R
4
i R
5
.
0
R
1
0
T
R
2
Is
U
REF
U
o
R
L
U
I
U
REF
R
o
R
4
R
5
I
o
U
BE
= U
SENSE
0
R
1
0
T
R
2
Is
U
REF
U
o
R
L
U
I
U
REF
R
o
R
4
R
5
I
o
U
SENSE
Rys. 3.4. Układy stabilizatorów z układem stabilizacji pr
ą
du ze zmniejszonym pr
ą
dem zwarciowym.
I
U
I
max
= I
K
U
O
I
Z
Rys. 3.5. Charakterystyka pr
ą
dowo-napi
ę
ciowa układów z rys. 3.4.
Analizuj
ą
c prac
ę
obu układów nale
ż
y podkre
ś
li
ć
,
ż
e do uzyskania takiej samej warto
ś
ci pr
ą
du
I
O
= I
K
jak w układzie klasycznym w którym R
5
→
∞
spadek napi
ę
cia na rezystorze R
O
musi by
ć
wi
ę
kszy od warto
ś
ci napi
ę
cia panuj
ą
cego na rezystorze R
4
.
Wynika st
ą
d,
ż
e rezystancja próbkuj
ą
ca
R
O
musi wi
ę
c by
ć
wi
ę
ksza !
Stosuj
ą
c układ z ograniczeniem pr
ą
du typu
FoldBack
pokazany na rys.
3.4, nie nale
ż
y przyjmowa
ć
zbyt du
ż
ego stosunku
I
K
/
I
Z
,
poniewa
ż
prowadzi to do wyra
ź
nego
pogorszenia sprawno
ś
ci stabilizatora (w szczególno
ś
ci w układach stabilizatorów niskich napi
ęć
),
- 8 -
powi
ę
kszonych strat mocy w rezystorze R
O
i pogorszeniu si
ę
współczynnika stabilno
ś
ci od zmian
obci
ąż
enia.
Poni
ż
ej podano odpowiednie zale
ż
no
ś
ci do obliczania (syntezy i analizy) układów
ograniczenia i stabilizacji pr
ą
du z rys. 3.4. Aby unikn
ąć
zadziałania układu przy pr
ą
dach ni
ż
szych ni
ż
znamionowy nale
ż
y sprawdzi
ć
, czy warunek I
MAX
/I
Z
> 1, jest spełniony w całym zakresie napi
ęć
wyj
ś
ciowych U
O
(stabilizator regulowany) i pr
ą
dów, oraz temperatur elementu regulacyjnego. Ponadto
w celu wydatnego zmniejszenia strat, jakie powstały przy obci
ąż
eniu znamionowym w rezystorze R
O
,
gdy jest du
ż
y stosunek I
MAX
/I
Z
, korzystne jest zmodyfikowanie układu. Przy obni
ż
eniu rezystancji R
O
,
poci
ą
ga to jednak za sob
ą
konieczno
ść
zmiany I
Z,
a tym samym zmiany stosunku I
MAX
/I
Z
. Zmniejszenie
rezystancji R
O
, przy zachowaniu takiego samego stosunku I
MAX
/I
Z
jest mo
ż
liwe tylko i wył
ą
cznie
poprzez obni
ż
enie napi
ę
cia U
SENSE
.
Z
Z
K
O
SENSE
SENSE
O
I
I
I
U
U
U
R
1
1
1
−
−
=
(2.1)
O
SENSE
O
K
O
O
SENSE
Z
U
U
R
I
U
R
U
I
+
+
=
(2.3)
−
−
−
=
1
1
1
5
4
Z
K
O
SENSE
Z
K
O
SENSE
I
I
U
U
I
I
U
U
R
R
(2.2)
(
)
5
4
5
4
1
R
U
U
R
R
R
I
I
SENSE
O
K
Z
+
+
+
=
(2.4)
W scalonych stabilizatorach napi
ę
cia cz
ę
sto stosuje si
ę
taki sposób ograniczenia pr
ą
du
wyj
ś
ciowego,
ż
e poza zakresem stabilizacji moc wydzielana w układzie stabilizatora powi
ę
ksza si
ę
umiarkowanie lub nie powi
ę
ksza si
ę
dzi
ę
ki zastosowanej automatycznej regulacji wewn
ę
trznego
napi
ę
cia odniesienia U
sense,
np. w zale
ż
no
ś
ci od wydzielanej temperatury zwi
ą
zanej ze wzrostem mocy
traconej. Jednym z niewielu produkowanych na
ś
wiecie stabilizatorów monolitycznych z układem
zabezpieczenia pr
ą
dowego, nadnapi
ę
ciowego i termicznego, oraz automatyczn
ą
regulacj
ą
mocy
traconej jest układ L200.
- 9 -
4.
Badane układy
4.1.
Stabilizator napi
ę
cia i pr
ą
du z układem scalonym L200
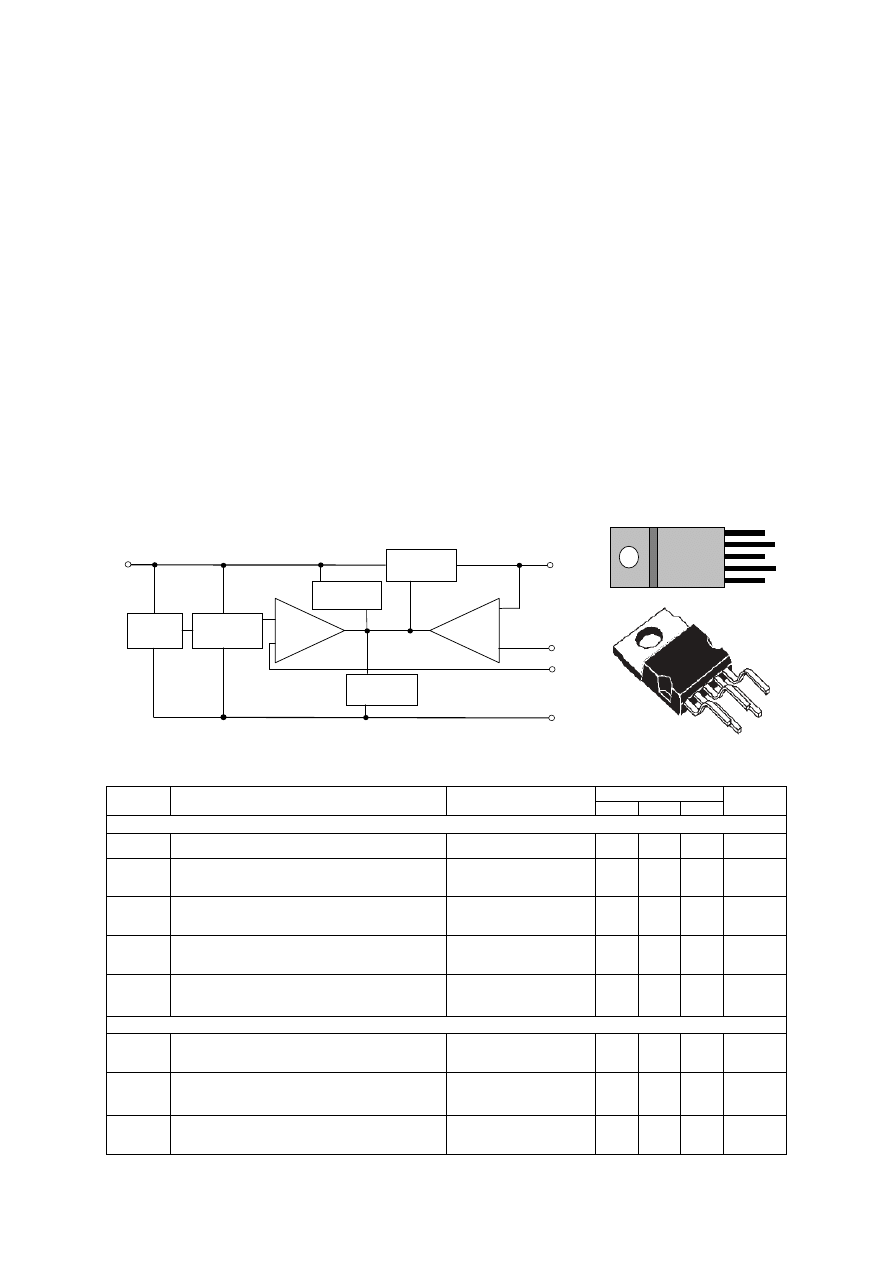
Układ scalony L200 zaproponowany przez firm
ę
SGS-Thomson jest monolitycznym
stabilizatorem napi
ę
cia i pr
ą
du. Podstawowe wła
ś
ciwo
ś
ci stabilizatora L200 to płynnie regulowane
napi
ę
cie wyj
ś
ciowe
U
O
od 2.75V do 30V (za pomoc
ą
pojedynczego rezystora), ustawiane
zabezpieczenie pr
ą
dowe, lub mo
ż
liwo
ść
regulacji płynnej pr
ą
du wyj
ś
ciowego
I
O
od ok. 20mA do 2A za
pomoc
ą
zewn
ę
trznego inwertera w postaci pojedynczego WO. Ponadto układ L200 wyposa
ż
ony
został przez konstruktorów w szereg zabezpiecze
ń
takich jak: ogranicznik pr
ą
du
I
Omax
= 2A, mocy
traconej (zgodnie z wykresem SOA – karta katalogowa), wył
ą
cznik termiczny 150
°
C, zabezpieczenie
przed zbyt wysokim napi
ę
ciem wej
ś
ciowym (do 60V przez 10ms) i ró
ż
nic
ą
napi
ęć
pomi
ę
dzy wej
ś
ciem
i wyj
ś
ciem wi
ę
ksz
ą
ni
ż
33V, które czyni
ą
go teoretycznie niezawodnym i eliminuj
ą
w praktyce potrzeb
ę
realizacji szeregu układów zabezpieczaj
ą
cych i posiadania całej gammy scalonych stabilizatorów
napi
ęć
stałych.
a)
b)
Ź
RÓDŁO
PRĄDOWE
Ź
RÓDŁO
NAPIĘCIA
REFERENCYJNEGO
WZMACNIACZ
BŁEDU
ELEMENT
REGULACYJNY
ZABEZPIECZENIE
SOA
KOMPARATOR
NAPIĘCIA
CZUJNIK
TERMICZNY
1 –
WEJŚCIE
5 –
WYJŚCIE
4 –
NAPIĘCIE
ODNIESIENIA
3 –
MASA
2 –
OGRANICZENIE
PRĄDOWE
5
4
3
2
1
Rys. 4.1.1. a) Schemat blokowy i b) opis wyprowadze
ń
„widok z góry” układu scalonego L200.
Tab. 4.1.1. Podstawowe parametry charakterystyczne scalonego stabilizatora L200
Warto
ś
ci
Symbol
Parametr
Warunki
pomiaru
Min
Typ
Max
Jedn.
Stabilizator napi
ę
cia T = 25
°°°°
C
U
o
Zakres napi
ęć
wyj
ś
ciowych
I
o
= 10mA
2.85
<>
36
V
∆∆∆∆
U
o
/U
o
Współczynnik stabilizacji napi
ę
cia wyj
ś
ciowego
od zmian obci
ąż
enia
I
min
= 10mA
I
max
= 1,5A
0.1
0.15
1
%
∆∆∆∆
U
o
/
∆∆∆∆
U
I
Współczynnik stabilizacji napi
ę
cia wyj
ś
ciowego
od zmian napi
ę
cia wej
ś
ciowego
U
I
= 8...20V
U
o
= 5V
0.1
<>
0.39
%
U
o
- U
I
Spadek napi
ę
cia pomi
ę
dzy wej
ś
ciem i wyj
ś
ciem
układu (pin 1 i 5)
I
o
= 1.5A
2
2.5
3
V
Z
o
Impedancja wyj
ś
ciowa
U
I
= 10V, U
o
= U
REF
I
o
= 500mA
F = 100Hz
1.5
1.5
3
m
Ω
Stabilizator pr
ą
du T = 25
°°°°
C
U
SC
Wewn
ę
trzne napi
ę
cie odniesienia
komparatora-ogranicznika pr
ą
du (pin 2 i 5)
U
I
= 10V, U
o
= U
REF
I
o
= 100mA
0.38
0.45
0.52
V
I
SC
Szczytowy pr
ą
d zwarcia
U
I
– U
o
= 14V
(pomi
ę
dzy pin 2 i 5
wł
ą
czono R
SC
< 0.01
Ω
)
<
<
3.5
A
∆∆∆∆
I
o
/I
o
Współczynnik stabilizacji pr
ą
du wyj
ś
ciowego od
zmian obci
ąż
enia
I
O
±∆
I
O
I
O
= 1A,
∆
I
O
= 1A
0.9
1
1.5
%
- 10 -
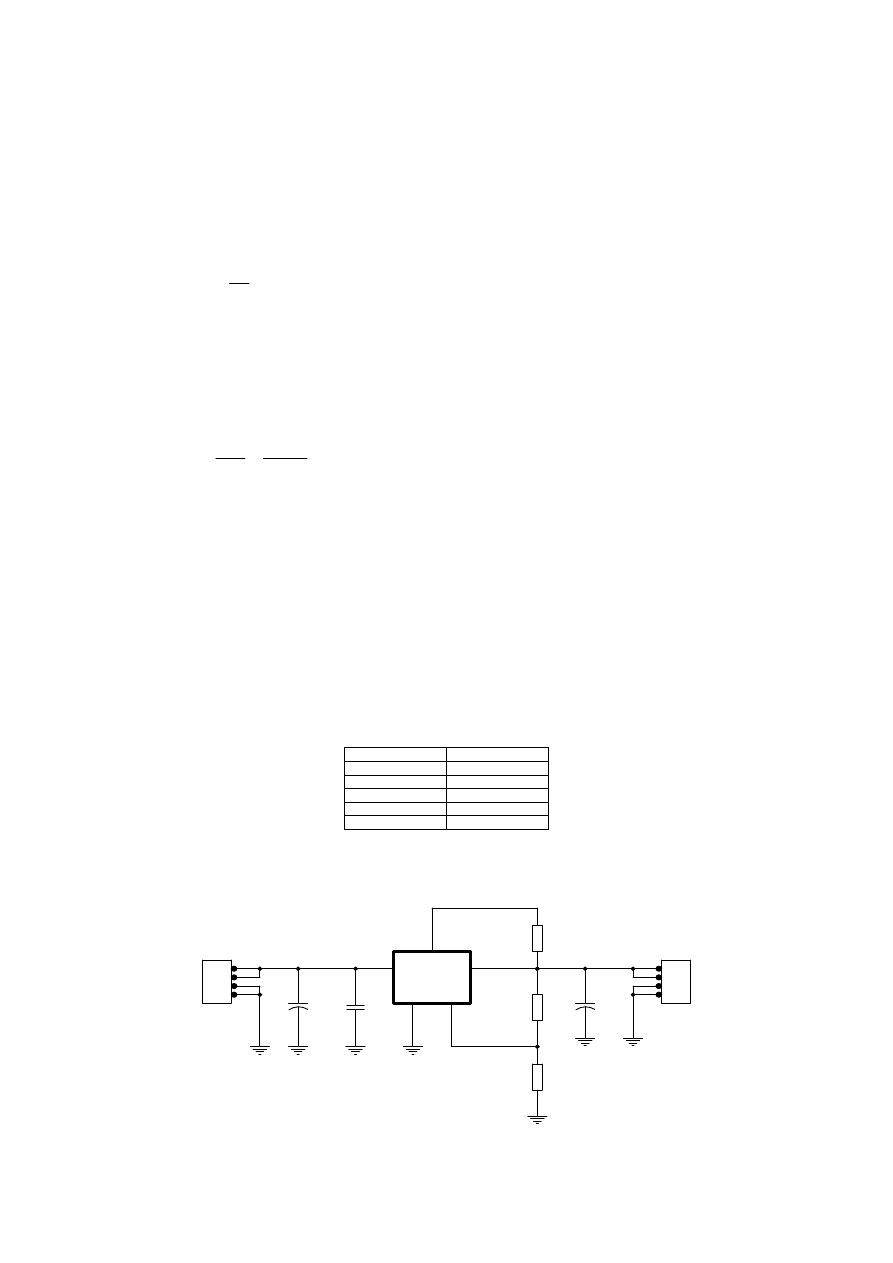
4.1.1. Stabilizator napi
ę
cia z ograniczeniem pr
ą
dowym z układem scalonym L200.
Rozwi
ą
zanie układowe.
Na rys. 4.1.1.1. przedstawiono schemat ideowy stabilizatora napi
ę
cia w postaci podstawowej
aplikacji układu scalonego L200. W układzie tym mo
ż
na programowa
ć
lub regulowa
ć
w sposób ci
ą
gły
za pomoc
ą
rezystora
5
R
stabilizowane napi
ę
cie wyj
ś
ciowe
O
U
zgodnie z zale
ż
no
ś
ci
ą
REF
O
U
R
R
U
+
=
6
5
1
(4.1.1.1)
w zakresie
(
)
BE
REF
I
O
REF
U
U
U
U
U
−
−
<
<
. W układzie tym pomi
ę
dzy ko
ń
cówk
ą
3 i 4 a wi
ę
c na
rezystorze
6
R
panuje napi
ę
cie referencyjne
REF
U
- rozwi
ą
zanie układowe z rys. 3.1 (c). Natomiast
maksymalny pr
ą
d wyj
ś
ciowy w tym konkretnym przypadku jest ograniczony do warto
ś
ci zgodnie ze
schematem rys. 4.1.1.1
Ω
=
=
47
.
0
45
.
0
4
max
V
R
U
I
SC
O
(4.1.1.2)
a wi
ę
c zdeterminowany jest warto
ś
ci
ą
rezystora próbkuj
ą
cego
4
R
. Zgodnie z karta katalogow
ą
układu L200 rezystor
6
R
mo
ż
e przyjmowa
ć
warto
ś
ci z zakresu od 330
Ω
do 1.5k
Ω
. Projektowanie
stabilizatora w aplikacji jak na rys. 4.1.1.1, sprowadza si
ę
do wyznaczenia stosunku rezystancji
5
R
/
6
R
zgodzie zale
ż
no
ś
ci
ą
(4.1.1.1), oraz wyznaczenia sumy rezystancji
6
5
R
R
+
, co umo
ż
liwi wyznaczenie
konkretnych warto
ś
ci
5
R
i
6
R
, przyjmuj
ą
c okre
ś
lony pr
ą
d dzielnika napi
ę
ciowego (spoczynkowy) od
4mA do 9mA. Rezystancje
5
R
i
6
R
mo
ż
na równie
ż
wyznaczy
ć
z zale
ż
no
ś
ci (4.1.1.1), przyjmuj
ą
c
zalecane warto
ś
ci
6
R
podane przez producenta w zale
ż
no
ś
ci od napi
ę
cia wyj
ś
ciowego jak to
pokazano w tabeli
U
o
±±±±
20%
R
6
±±±±
5%
5V
1.5k
Ω
Ω
Ω
Ω
12V
1k
Ω
Ω
Ω
Ω
15V
750
Ω
Ω
Ω
Ω
18V
330
Ω
Ω
Ω
Ω
24V
510
Ω
Ω
Ω
Ω
W przypadku gdy chcemy aby napi
ę
cie wyj
ś
ciowe było płynnie regulowane za pomoc
ą
5
R
, to
6
R
ma
ustalon
ą
optymaln
ą
warto
ść
podan
ą
przez producenta równ
ą
820
Ω
.
R4
0.47
R6
*
0
0
R5
*
IC1
L200C
1
5
3
4
2
IN
O
U
T
G
N
D
V
R
E
F
LIM
JP2
OUT
1
2
3
4
0
0
+
C3
220u/50
C2
220n
JP1
IN
1
2
3
4
0
0
0
+
C1
1000u/50
Rys. 4.1.1.1. Schemat ideowy programowanego stabilizatora napi
ę
cia z zabezpieczeniem pr
ą
dowym z układem scalonym L200.
- 11 -
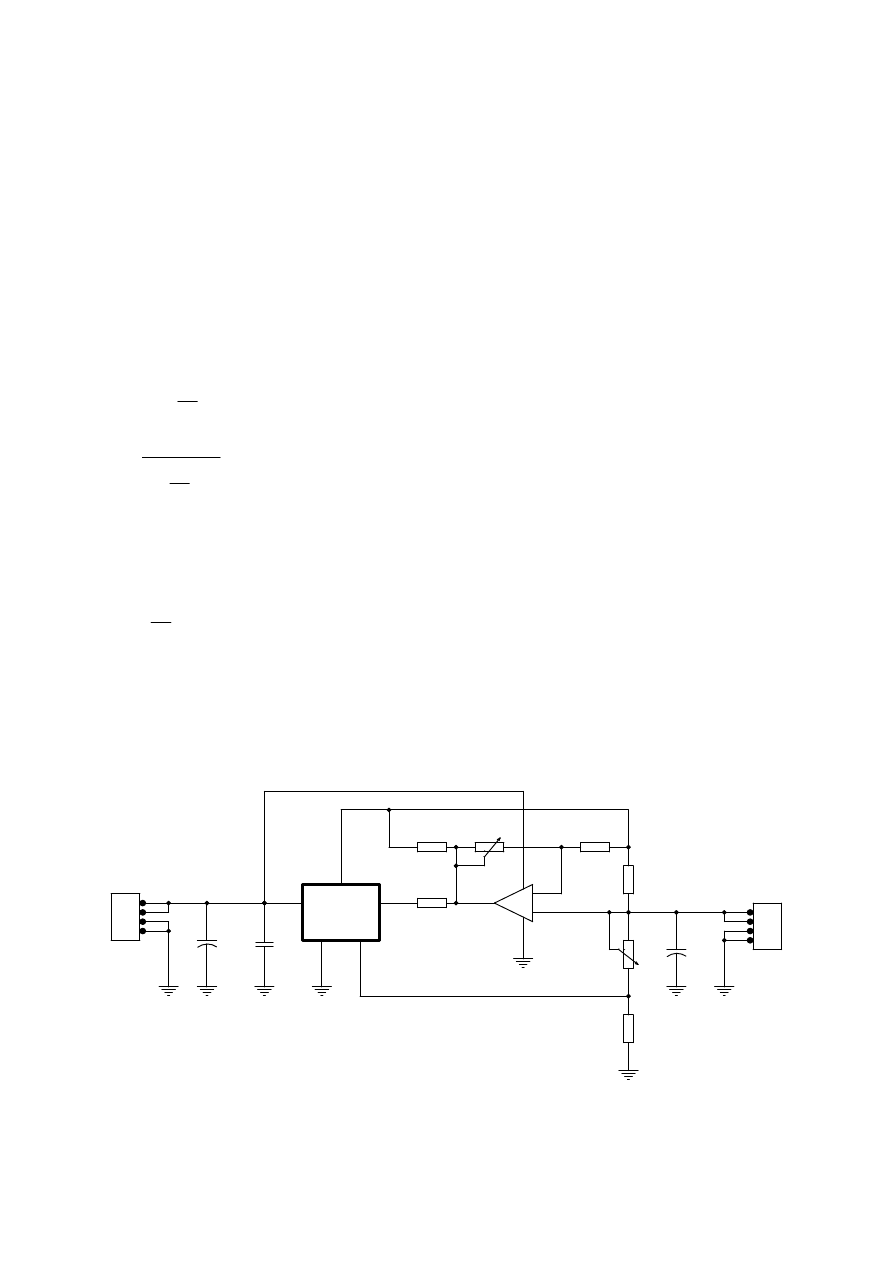
4.1.2. Regulowany stabilizator napi
ę
cia i pr
ą
du z układem scalonym L200. Rozwi
ą
zanie
układowe i projektowanie.
W celu jednoczesnej realizacji regulowanego stabilizatora napi
ę
cia i pr
ą
du z układem L200 w
układzie tzw. p
ę
tli pr
ą
dowej L200, zastosowano WO pracuj
ą
cy w układzie inwertera asymetrycznego
jak na rys. 4.1.2.1. Inwerter ten stanowi
ą
rezystory R
2
i R
3
, oraz WO LM741 zasilany asymetrycznie
(rys. 4.1.2.2). Przepływaj
ą
cy pr
ą
d przez rezystor próbkuj
ą
cy R
4
, powoduje na nim spadek napi
ę
cia
równy
4
R
I
O
. Spadek ten jest równy spadkowi napi
ę
cia na R
3
ze znakiem przeciwnym
3
4
R
I
R
I
SC
O
−
=
.
W oczku R
1
, R
2
i R
3
suma spadków napi
ęć
jest równa 0V. Na tej podstawie mo
ż
emy zapisa
ć
nast
ę
puj
ą
ce równanie
0
2
3
=
+
+
SC
SC
SC
U
R
I
R
I
. Podstawiaj
ą
c za
3
4
R
R
I
I
O
SC
−
=
, otrzymujemy ostatecznie
+
=
1
3
2
4
R
R
R
U
I
SC
O
(4.1.2.1)
Pomi
ę
dzy ko
ń
cówkami 2 i 5 układu scalonego L200 powstaje spadek napi
ę
cia U
SC
zale
ż
ny od
stosunku rezystancji R
2
/R
3
i pr
ą
du obci
ąż
enia Io. Je
ż
eli przy danym pr
ą
dzie obci
ąż
enia płyn
ą
cym
przez R4 stosunek warto
ś
ci rezystancji R
2
/R
3
jest tak dobrany,
ż
e
45
.
0
1
3
2
4
>
+
R
R
R
I
O
V , w temperaturze 300K,
to zwi
ę
kszanie napi
ę
cia wyj
ś
ciowego (np. za pomoc
ą
R5) przy tej samej rezystancji R
O
obci
ąż
enia
podł
ą
czonej do zacisków wyj
ś
ciowych JP2 nie spowoduje wzrostu pr
ą
du, poniewa
ż
I
o
jest
stabilizowany.
R0
10
0
+
C3
220u/50
0
+
-
IC2
LM741
3
2
6
7
4
JP1
IN
1
2
3
4
0
0
R4
0.47
C2
220n
R3
120
0
0
R1
1k
R6
820
JP2
OUT
1
2
3
4
IC1
L200C
1
5
3
4
2
IN
O
U
T
G
N
D
V
R
E
F
LIM
0
0
R2
100k
R5
4.7k
+
C1
1000u/50
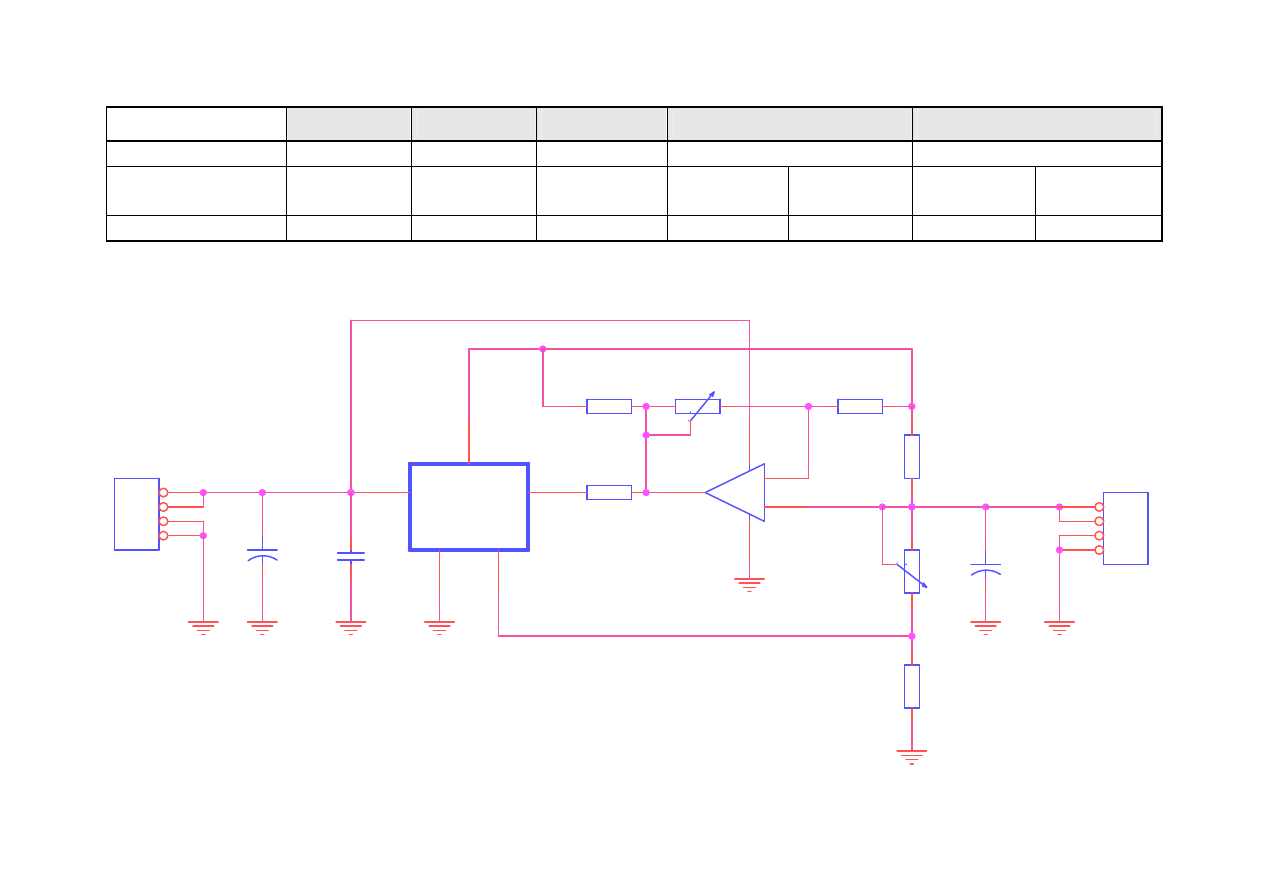
Rys. 4.1.2.1. Schemat ideowy regulowanego stabilizatora napi
ę
cia i pr
ą
du z układem scalonym L200.
- 12 -
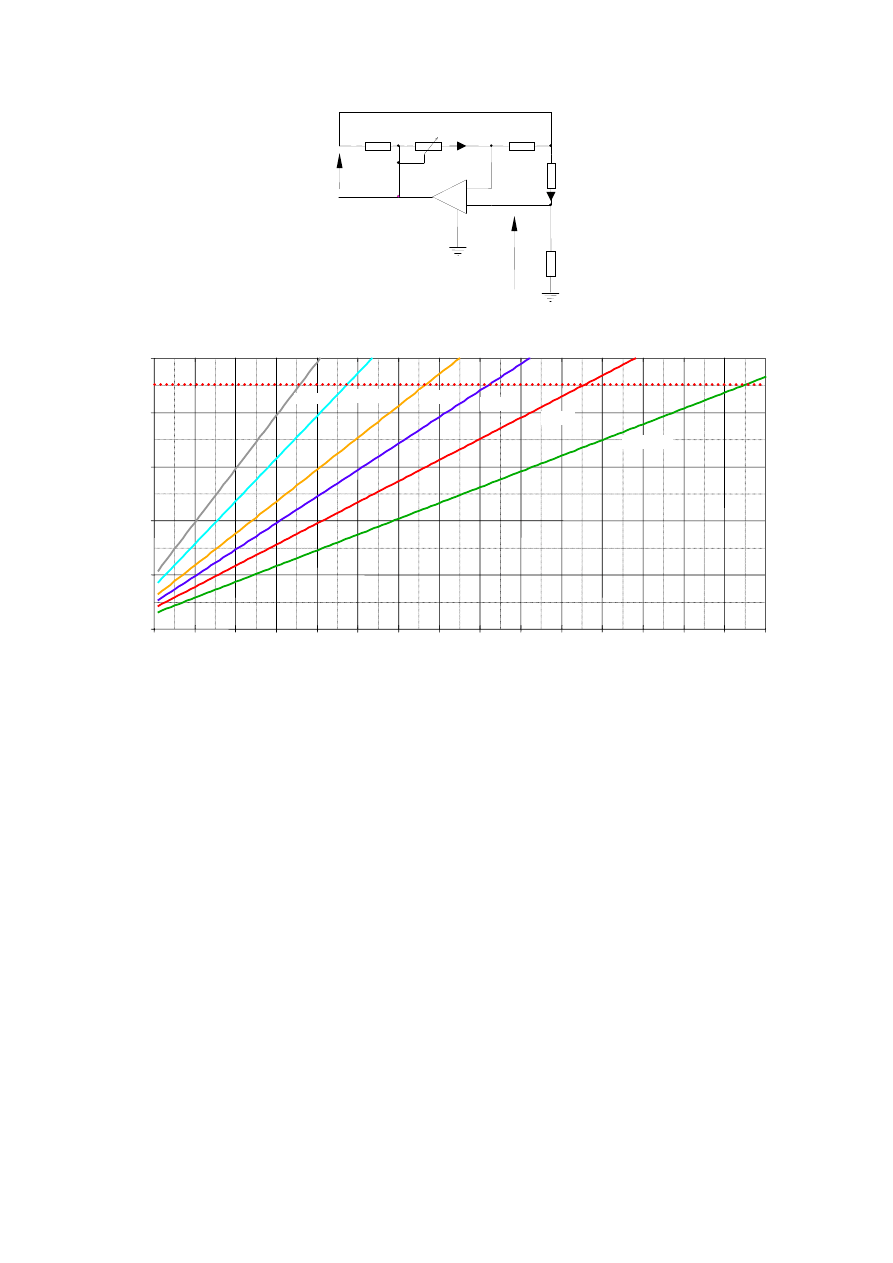
Rys. 4.1.2.2. Schemat inwertera pracuj
ą
cego w p
ę
tli pr
ą
dowej ze stabilizatorem L200.
R
2
[
Ω
]
0
0.1K
0.2K
0.3K
0.4K
0.5K
0.6K
0.7K
0.8K
0.9K
1.0K
1.1K
1.2K
1.3K
1.4K
1.5K
0V
100
200
300
400
500
I
O
= 300mA
400mA
500mA
I
O
= 1A
600mA
800mA
U
SC
nom
Rys. 4.1.2.3. Charakterystyki inwertera z rys. 4.1.2.2. Warto
ś
ci rezystancji przyj
ę
to odpowiednio
R
4
= 0.1
Ω
, R
3
= 100
Ω
, R
1
= 1k na podstawie karty katalogowej firmy SGS -Thomson.
Projekt programowanego lub regulowanego stabilizatora napi
ę
cia i pr
ą
du z układem L200
sprowadza si
ę
odpowiednio do obliczenia warto
ś
ci rezystorów R
6
i R
5
układu stabilizatora napi
ę
cia
zgodnie z procedur
ą
podana w pkt. 4.1.1. i zaprojektowania inwertera ze WO (LM741, TL061 lub
podobne) zgodnie z wyprowadzonymi zale
ż
no
ś
ciami w pkt. 4.1.2. W ostatnim przypadku projektu
stabilizatora pr
ą
du nale
ż
y obliczy
ć
warto
ść
rezystancji R3 przyjmuj
ą
c,
ż
e warto
ść
maksymalna
rezystancji nastawnej R2 (pr
ą
d minimalny) jest wcze
ś
niej znana i dodatkowo podany jest zakres
regulacji pr
ą
du wyj
ś
ciowego I
Omin
...I
Omax
. Gdy R
2
= 0, to pr
ą
d stabilizowany jest równy I
Omax
= U
SC
/R
4
.
Przy projektowaniu mo
ż
na równie
ż
przyj
ąć
ustalon
ą
warto
ść
rezystora R
3
z zakresu od 100
Ω
do
500
Ω
, a R
2
obliczamy dla zadanej górnej warto
ś
ci pr
ą
du, który b
ę
dzie pr
ą
dem stabilizowanym. Małe
warto
ś
ci rezystancji R
3
przyjmujemy wówczas gdy chcemy regulowa
ć
pr
ą
d w zakresie od warto
ś
ci
minimalnej do ok. 200mA, natomiast w przypadku regulacji pr
ą
du powy
ż
ej 1A wtedy R
3
przyjmuje
du
ż
e warto
ś
ci > 500
Ω
. Rezystor próbkuj
ą
cy R
4
ma przyj
ę
t
ą
warto
ść
równ
ą
0.47
Ω
.
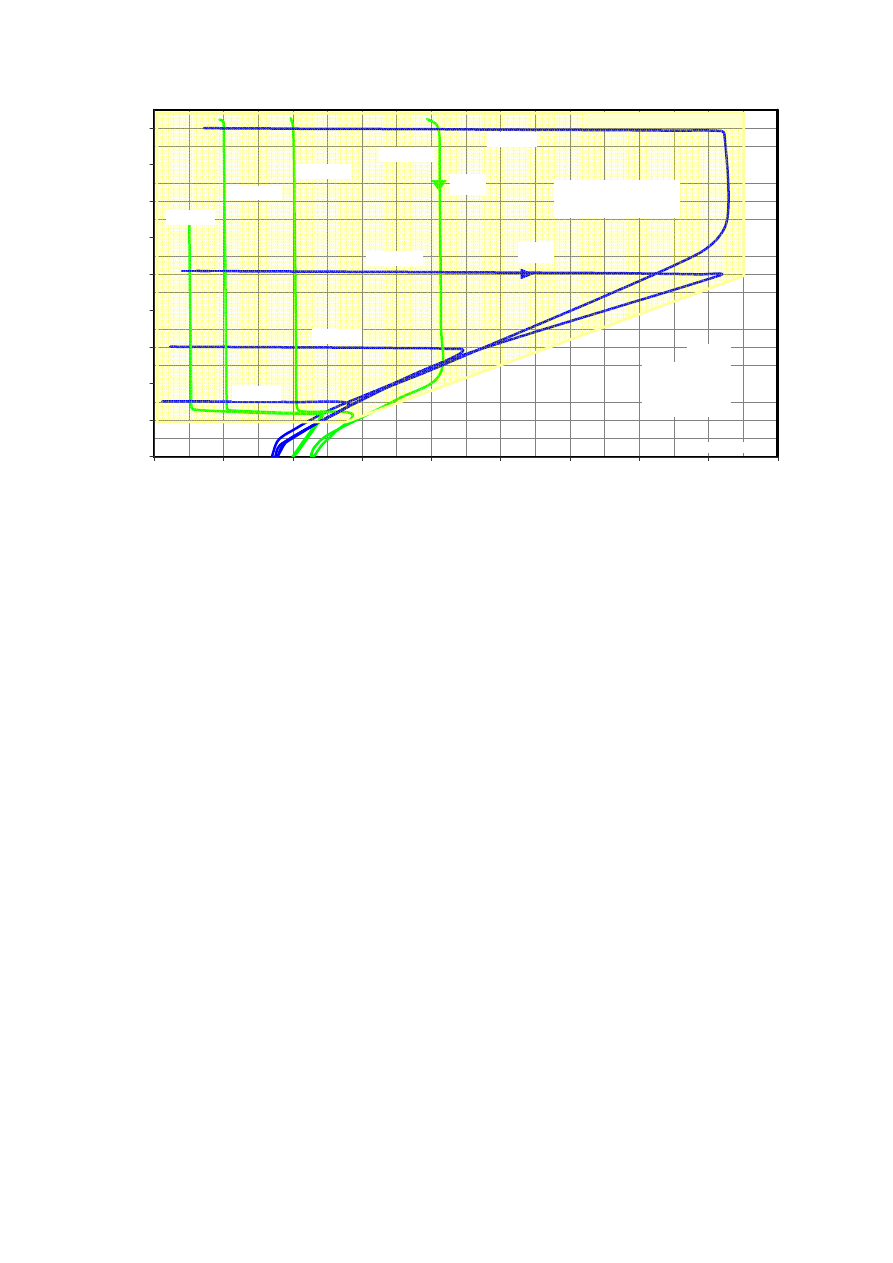
W celu przedstawienia zasady regulacji napi
ęć
i pr
ą
dów przy u
ż
yciu stabilizatora L200C, z
zastosowaniem dodatkowego inwertora w p
ę
tli pr
ą
dowej, na wspólnym wykresie pokazano pomiarowe
charakterystyki pr
ą
dowo-napi
ę
ciowe (krzy
ż
owe) układu w tzw. Obszarze Bezpiecznej Pracy
(
SOA
–
Safe Operation Area
) rys. 4.1.2.4.
R1
1k
R2
R3
+
-
3
2
6
4
Ro
R4
0.47
U
SC
I
SC
U
O
- 13 -
0
2
4
6
8
10
12
14
16
18
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
Io [A]
U
o
[
V
]
Warunki pomiaru
U
I
= 33V ± 1V
T
j
= 30°C
R
O
↓
R
O
↓
SOA - Obszar Bezpiecznej Pracy
Uo = 3V
Uo = 6V
Uo = 10V
Uo = 18V
Io = 425mA
Io =200mA
Io = 100mA
Io = 50mA
•
Stabilizacja napi
ę
cia
•
Stabilizacja pr
ą
du
L200C
opracowal dr M Zaradny
Rys. 4.1.2.4. Pomiarowe charakterystyki pr
ą
dowo-napi
ę
ciowe stabilizatora L200C uzyskane w układzie jak na rys. 4.1.2.1.
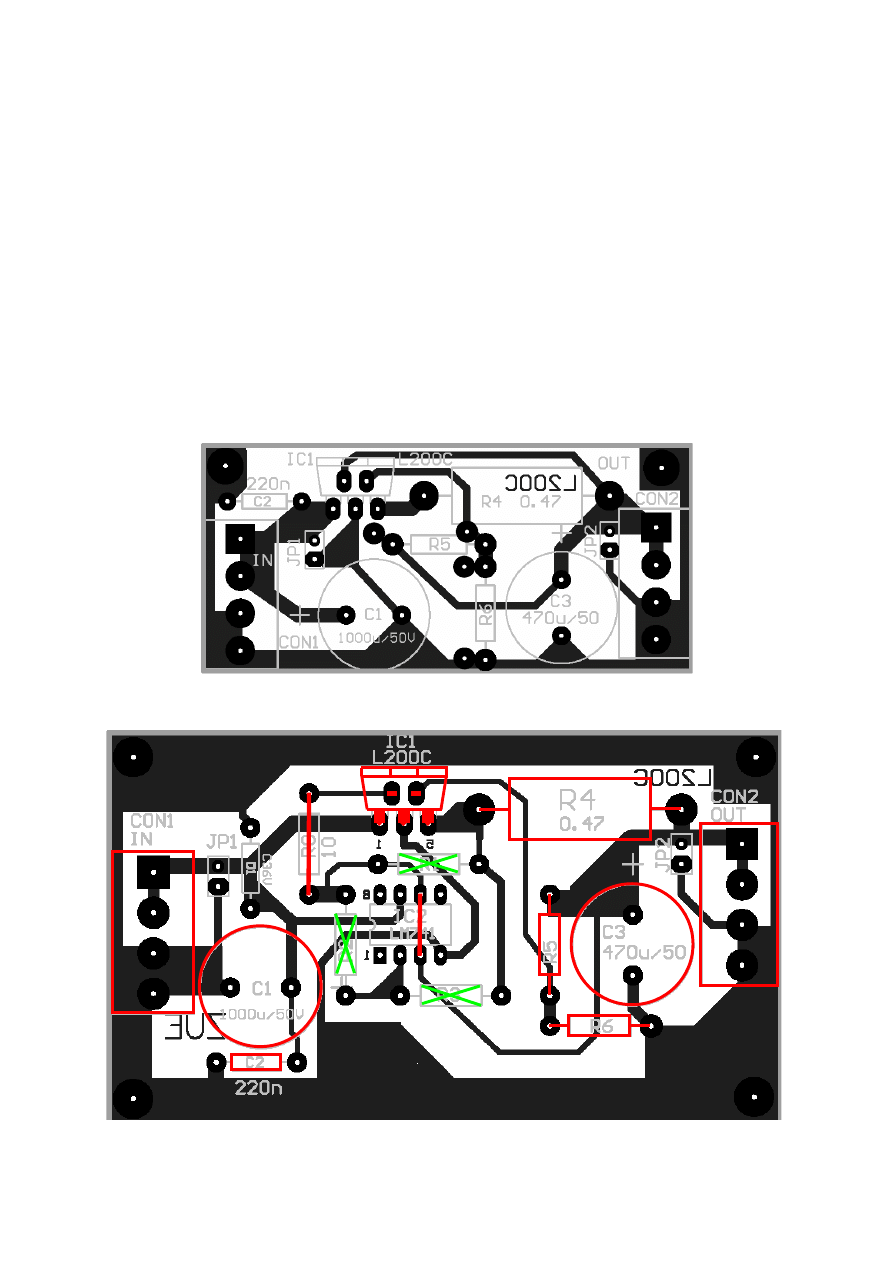
4.1.3. Realizacja układów. Płytka drukowana, monta
ż
i uruchomienie
Do monta
ż
u i pomiarów obliczonego stabilizatora napi
ę
cia z zabezpieczeniem nad pr
ą
dowym
z punktu 4.1.1 słu
ż
y dedykowana drukowana płytka monta
ż
owa, której widok przedstawiono na rys.
4.1.3.1. Struktura płytki umo
ż
liwia monta
ż
z kilku dyskretnych elementów biernych i układu scalonego
L200 szeregu stabilizatorów napi
ę
cia, w podstawowej aplikacji, które schemat ideowy przedstawiono
na rys. 4.1.1.1.
W celu samodzielnej realizacji, monta
ż
u i pó
ź
niejszych pomiarów laboratoryjnych
programowanego stabilizatora napi
ę
cia i pr
ą
du z punktu 4.1.2 o schemacie ideowym jak na rys.
4.1.2.1, przedstawiono drukowan
ą
płytk
ą
monta
ż
ow
ą
, której widok przedstawiono na rys. 4.1.3.2.
Struktura płytki umo
ż
liwia monta
ż
z elementów biernych, układu scalonego wzmacniacza
operacyjnego LM741 i wykonawczego układu stabilizatora scalonego L200, programowanego tzw.
stabilizatora krzy
ż
owego (pr
ą
dowo-napi
ę
ciowego), b
ą
d
ź
zgodnie z uproszczeniami zaznaczonymi
kolorem czerwonym i zielonym struktura płytki umo
ż
liwia równie
ż
realizacj
ę
układu z rys. 4.1.1.1.
To zadanie projektowo-laboratoryjne przeznaczone jest w szczególno
ś
ci dla studentów
chc
ą
cych
wykaza
ć
si
ę
umiej
ę
tno
ś
ci
ą
samodzielnego
projektowania
i
realizacji
eksperymentalnej w kierunku bardziej zaawansowanych układów elektronicznych.
Samodzielne
wykonanie płytki drukowanej z rys., monta
ż
i uruchomienie, oraz poprawna weryfikacja i interpretacja
charakterystyk pomiarowych stabilizatora napi
ę
ciowo-pr
ą
dowego
zasługuj
ą
na ocen
ę
celuj
ą
c
ą
.
Obie płytki drukowane zawieraj
ą
cz
ęść
wmontowanych na stałe elementów. S
ą
to: gniazda i
ko
ń
cówki pomiarowe JP1 i CON1, oraz JP2 i CON2 odpowiednio wej
ś
cia i wyj
ś
cia stabilizatora,
kondensatory zabezpieczaj
ą
ce C1 i C2 przed pojawieniem si
ę
składowej zmiennej na wej
ś
ciu, w
przypadku zasilania stabilizatora z laboratoryjnego zasilacza regulowanego. W przypadku statycznych
- 14 -
pomiarów charakterystyk przej
ś
ciowych, wyj
ś
ciowych itp. stabilizatora wielu długich przewodów
ł
ą
cz
ą
cych przyrz
ą
dy pomiarowe istnieje realne ryzyko wzbudzenia si
ę
stabilizatora. W tym celu mo
ż
na
wyeliminowa
ć
efekty wzbudzania si
ę
stabilizatora przez zastosowanie i dobór empiryczny pojemno
ś
ci
kondensatora blokuj
ą
cego C
2
(np. 100nF, 220nF).
Monta
ż
u elementów dokonujemy w nast
ę
puj
ą
cy sposób: (i) gniazda, elementy mechaniczne
mocowania radiatora układu scalonego, elementy bierne, (ii) półprzewodniki, przewody zasilaj
ą
ce i
pomiarowe.
Przed uruchomieniem układu nale
ż
y dokładnie sprawdzi
ć
jako
ść
poł
ą
cze
ń
lutowanych,
poprawne i zgodne ze schematem ideowym poł
ą
czenia wszystkich elementów i ich warto
ś
ci
!!!. Ostateczne przed uruchomieniem nale
ż
y skonsultowa
ć
si
ę
z prowadz
ą
cym zaj
ę
cia
laboratoryjne.
Rysunki płytek drukowanych PCB z zachowaniem liniowej skali 2:1.
Rys. 4.1.3.1. Widok płytki drukowanej „od strony elementów” do monta
ż
u stabilizatorów napi
ę
cia z układem L200.
Rys. 4.1.3.2. Widok uniwersalnej płytki drukowanej „od strony elementów” do monta
ż
u stabilizatorów napi
ę
cia (bez R
0
, R
1
, R
2
,
R
3
i IC2) i stabilizatorów napi
ę
ciowo-pr
ą
dowych, z układem L200.
- 15 -
5.
Projekt układu
Istot
ą
niniejszego
ć
wiczenia jest wcze
ś
niejsze zaprojektowanie układu wskazanego
stabilizatora o zadanych parametrach, a nast
ę
pnie jego monta
ż
i pomiary na laboratorium. W tym celu
student powinien si
ę
zgłosi
ć
po temat do prowadz
ą
cego zaj
ę
cia nie pó
ź
niej ni
ż
7 dni przed terminem
rozpocz
ę
cia laboratorium.
Temat projektu okre
ś
la:
1. Układ stabilizatora
2. Zakres zmian napi
ę
cia wej
ś
ciowego
±
∆
U
I
3. Napi
ę
cie wyj
ś
ciowe U
0
pr
ą
d wyj
ś
ciowy I
0
5. U
ż
yte elementy półprzewodnikowe
Ponadto wykonany projekt powinien zawiera
ć
:
1. Obliczenia projektowe (w tym rysunek układu zawieraj
ą
cy: oznaczenia i warto
ś
ci
rezystorów oraz kondensatorów, zwroty napi
ęć
oraz pr
ą
dów i ich warto
ś
ci,
charakterystyki, odpowiednie wzory). W przypadku układu scalonego (np. L200)
odpowiednie notatki i obliczenia mo
ż
na wykonywa
ć
we własnej wydrukowanej do tego
celu karcie katalogowej.
2. Je
ś
li to mo
ż
liwe - analiz
ę
programem PSpice
3. Wykaz elementów
4. Obliczenia radiatora (dopuszczalne straty mocy)
Gotowy staranny projekt nale
ż
y odda
ć
do sprawdzenia prowadz
ą
cemu zaj
ę
cia przed
rozpocz
ę
ciem laboratorium. Jest to warunek konieczny dopuszczenia do
ć
wiczenia !!!
6.
Program
ć
wiczenia
Na podstawie wykonanego projektu nale
ż
y zmontowa
ć
układ stabilizatora. Celowe jest
wcze
ś
niejszy sprawdzenie lub pomiar warto
ś
ci u
ż
ytych elementów. Nale
ż
y równie
ż
zamontowa
ć
obliczony radiator dla tranzystora regulacyjnego lub układu scalonego. Nale
ż
y unika
ć
zbyt du
ż
ej mocy
traconej w elemencie regulacyjnym lub układzie scalonym ze wzgl
ę
du na wzrost temperatury co
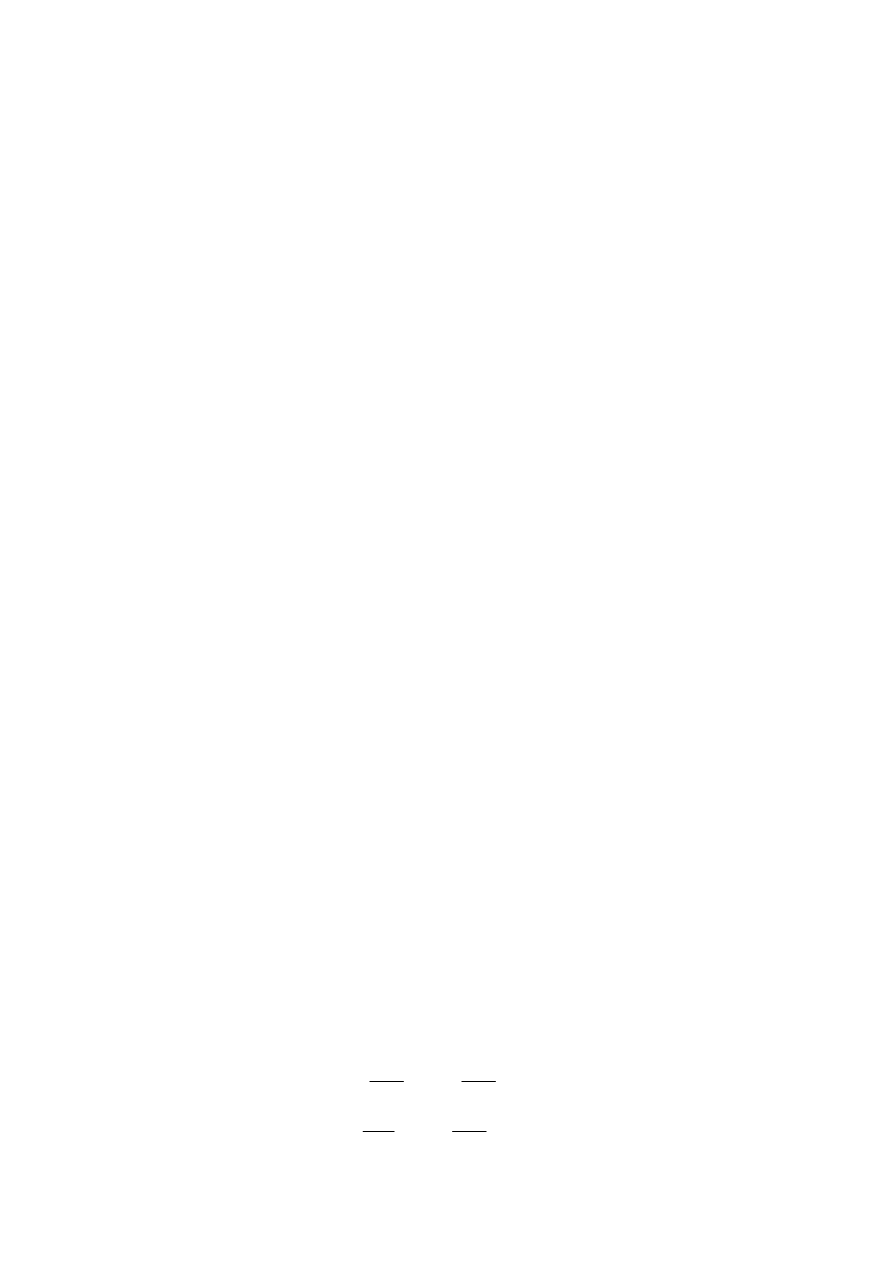
prowadzi do zmiany warunków dokonywanego pomiaru.
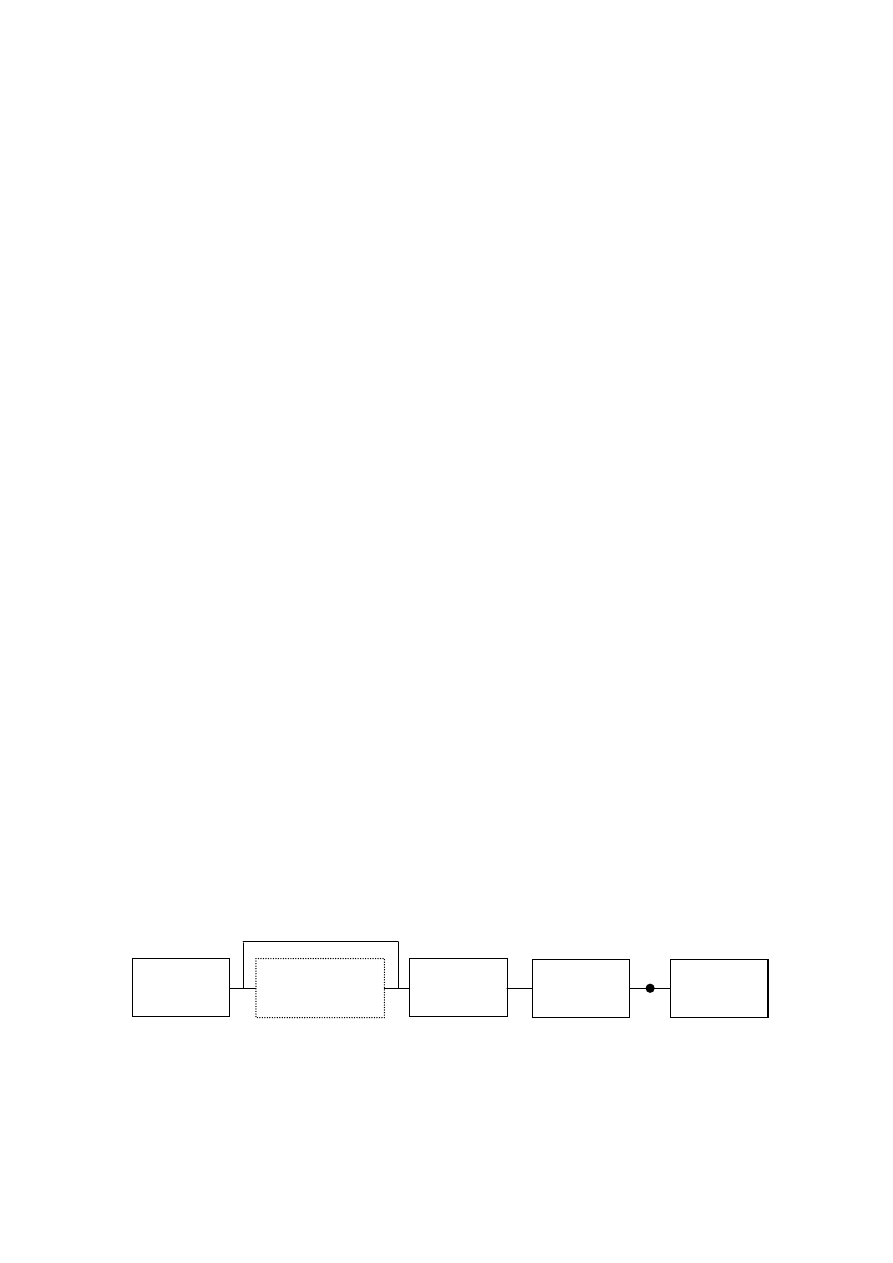
6. 1.
Zasilanie sieciowe
Układ prostownika sieciowego, przedstawiony w
ć
wiczeniu zasilacze niestabilizowane, nale
ż
y
zestawi
ć
zgodnie z rys. 6.1.1. Symulacj
ę
zmian napi
ę
cia sieci umo
ż
liwia autotransformator.
Sieć energetyczna
AC~230V
Transformator
Ochronny
230V/18V
Autotransformator
AC~0...250V
Prostownik
Stabilizator
Liniowy
Rys. 6.1.1. Układ regulowanego prostownika sieciowego.
Prostownik z transformatorem sieciowym wykorzystany w
ć
wiczeniu z prostownikami pozwala
na współprac
ę
ze stabilizatorami pobieraj
ą
cymi pr
ą
d maksymalny I
wemax
= 0.75A. W przypadku
stabilizatora o wi
ę
kszym poborze pr
ą
du, nale
ż
y zastosowa
ć
regulowany zasilacz laboratoryjny o
wi
ę
kszym pr
ą
dzie maksymalnym.
- 16 -
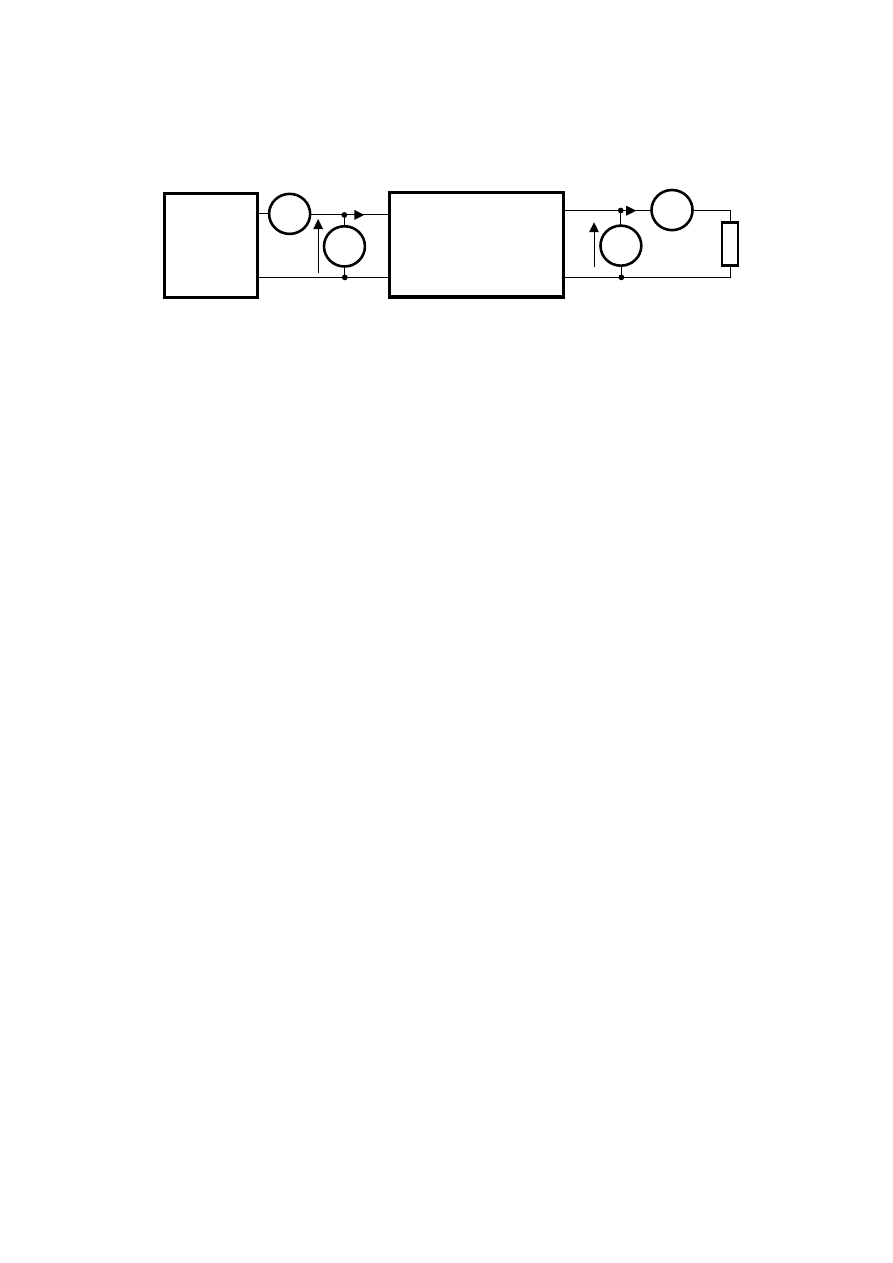
6. 2.
Układ pomiarowy
Układ pomiarowy stabilizatorów napi
ę
cia lub pr
ą
du przedstawiono na rys. 6.2.1.
Stabilizator
U
I
I
o
I
I
U
o
R
L
Prostownik
lub
Zasilacz
A
V
V
A
Rys. 6.2.1. Układ pomiarowy stabilizatorów.
6. 3.
Pomiary i zadanie laboratoryjne
6. 3. 1. Pomiary t
ę
tnie
ń
W przypadku zasilania stabilizatora (rys. 6.1.1) zasilaczem niestabilizowanym z
ć
wiczenia nr1,
wyznaczy
ć
metod
ą
oscyloskopow
ą
t
ę
tnienia prostownika k
t
oraz stabilizatora k
ts
przy pr
ą
dzie
wyj
ś
ciowym I
O
< I
Omax
. Pomiar nale
ż
y przeprowadzi
ć
dla wybranych warto
ś
ci kondensatora
filtruj
ą
cego
.
6. 3. 2. Stabilizator napi
ę
cia
6. 3. 2. 1. Pomiar charakterystyki U
0
= f(U
I
), R
L
- parametr
1. Zmierzy
ć
U
0
=f(U
I
) dla kilku wskazanych warto
ś
ci rezystancji obci
ąż
enia R
L
,
tak
ż
e I
O
< I
Omax
.
2. Wykre
ś
li
ć
zmierzone charakterystyki U
0
=f(U
I
).
3. Okre
ś
li
ć
zakresy stabilizacji
∆
U
0
dla ustalanych rezystancji obci
ąż
enia
oraz obliczy
ć
współczynniki stabilizacji S
u
.
4. Okre
ś
li
ć
tzw. Dropout stabilizatora dla wskazanych warto
ś
ci rezystancji R
L
6. 3. 2. 2. Pomiar charakterystyki U
0
= f(I
0
), U
I
- parametr
1. Zmierzy
ć
U
0
= f(I
0
) dla kilku wskazanych warto
ś
ci napi
ę
cia wej
ś
ciowego U
I
.
2. Wykre
ś
li
ć
zmierzone charakterystyki U
0
= f(I
0
).
3. Zaznaczy
ć
zakres stabilizacji
∆
U
0
i wyznaczy
ć
rezystancj
ę
R
ƒ
O
stabilizatora.
4. Wyznaczy
ć
współczynnik stabilizacji od zmian obci
ąż
enia S
RL
, przyjmuj
ą
c
maksymalny pr
ą
d I
O
nie powoduj
ą
cy przej
ść
układu w stabilizacj
ę
pr
ą
du
5. Zmierzy
ć
U
0
= f(I
0
), tu
ż
poza zakresem stabilizacji napi
ę
cia „na kolanie
charakterystyki”.
6. Zmierzy
ć
pr
ą
d zwarcia I
Z
, dla trzech wskazanych warto
ś
ci napi
ę
cia U
I
Uwaga!
Zmiany warto
ś
ci pr
ą
du I
O
uzyskujemy przez dyskretn
ą
zmian
ę
rezystancji
obci
ąż
enia R
L
.

- 17 -
6. 3. 3. Stabilizator pr
ą
du
(podpunkt 4.1.2)
6. 3. 3. 1. Pomiar charakterystyki I
0
= f (U
I
), R
L
- parametr
1. Zmierzy
ć
I
0
= f(U
I
) dla kilku wskazanych warto
ś
ci rezystancji obci
ąż
enia R
L
.
2. Wykre
ś
li
ć
zmierzone charakterystyki I
0
=f(U
I
).
6. 3. 3. 2. Pomiar charakterystyki I
0
= f(U
0
), U
I
– parametr
1. Zmierzy
ć
I
0
= f(U
0
) dla kilku wskazanych warto
ś
ci napi
ę
cia wej
ś
ciowego U
I
.
2. Zmierzy
ć
pr
ą
d zwarcia I
0
= f(U
0
= 0V) dla dwóch znacznie si
ę
ró
ż
ni
ą
cych
wskazanych warto
ś
ci napi
ę
cia wej
ś
ciowego U
I
3. Wykre
ś
li
ć
zmierzone charakterystyki I
0
= f(U
0
).
Uwaga!
Zmiany warto
ś
ci pr
ą
du U
O
uzyskujemy przez dyskretn
ą
zmian
ę
rezystancji
obci
ąż
enia R
L
.
7.
Zagadnienia
1.
Definicje parametrów oraz charakterystyki stabilizatorów napi
ę
cia i pr
ą
du.
2.
Schemat blokowy i zasada działania stabilizatora kompensacyjnego o pracy ci
ą
głej.
3.
Graficzna interpretacja działania kompensacyjnego stabilizatora napi
ę
cia przy zmianie
rezystancji obci
ąż
enia oraz zmianie napi
ę
cia wej
ś
ciowego.
4.
Metody poprawy parametrów stabilizatora kompensacyjnego.
5.
Rodzaje zabezpiecze
ń
nadpr
ą
dowych i stabilizatorów pr
ą
du.
6.
Rozwi
ą
zania układowe stabilizatorów napi
ę
cia i pr
ą
du.
7.
Układ scalony L200: budowa, działanie, parametry i zastosowania.
9.
Sprawno
ść
, straty mocy oraz dobór radiatorów.
10.
Projektowanie stabilizatorów z wykorzystaniem układu scalonego L200 i zasada działania.
8.
Literatura
[1]
Antoszkiewicz K., Nosal Z., „ Zbiór zada
ń
z układów elektronicznych liniowych”, WNT, 1998
[2]
Baranowski J., Czajkowski G., "Układy elektroniczne. Cz
ęść
I", WNT, ,1994. ss. 391-426
[3]
Borkowski A., „Układy scalone w stabilizatorach napi
ę
cia stałego”, WNT 1985
[4]
Borkowski A., „Zasilanie urz
ą
dze
ń
elektronicznych”, WKŁ, 1990, 98-198, 295-356
[5]
Golde W., "Układy elektroniczne. Cz
ęść
II", WNT, , 1976. ss.261-286
[6]
Kuta S., „ Układy elektroniczne. Cz
ęść
I”, AGH, 1995, ss. 423-466
[7]
Kwa
ś
niewski S., „Stabilizatory napi
ę
cia. Dane i zastosowania. Tom I i II”, Gda
ń
sk, 1996
[8]
SGS-Thomson ICs Databook, 1993
[9]
Pawłowski J., "Układy elektroniczne. Nieliniowe układy analogowe ", WNT, 1975. ss. 131-176
[10]
SGS-Thomson, Application Note – AN255/1288
[11]
Tietze U., Schenk Ch., „Układy półprzewodnikowe“ WNT 1997
[12]
J. Witkowski, Układy Elektroniczne I – wykłady
[13]
Z. Musiałowski, „Laboratorium układów elektronicznych. Cz. I”, Oficyna wyd. PWr., 1998

- 18 -
9.
Przygotowanie do
ć
wiczenia
Przed realizacj
ą
ć
wiczenia studenci otrzymuj
ą
od prowadz
ą
cego zaj
ę
cia zadanie i
odpowiednie zało
ż
enia projektowe. W zadaniu okre
ś
lony jest układ stabilizatora z wykorzystanie
układu scalonego L200, a wi
ę
c mo
ż
e to by
ć
programowany stabilizator napi
ę
cia z zabezpieczeniem
pr
ą
dowym (obowi
ą
zkowo), lub programowany stabilizator napi
ę
ciowo-pr
ą
dowy (
wówczas mo
ż
na
samodzielnie wykona
ć
płytk
ę
drukowan
ą
). Student dopuszczony b
ę
dzie do
ć
wiczenia na
podstawie znajomo
ś
ci
ć
wiczenia i zagadnie
ń
teoretycznych dotycz
ą
cych
ć
wiczenia (zaliczona
kartkówka), a ponadto warunkiem koniecznym jest staranne przygotowanie zadania projektowego i
szablonu
ć
wiczenia według poni
ż
szych wskazówek.
9. 1.
Zadanie projektowe
1. W zadaniu nale
ż
y przedstawi
ć
sposób wyznaczania elementów układu i ich
warto
ś
ci np. według procedury podanej w opisie do
ć
wiczenia pkt. 4. – parametry
zadane i uzyskane. Nale
ż
y pami
ę
ta
ć
o doborze warto
ś
ci elementów (w
szczególno
ś
ci rezystorów) ze znormalizowanych szeregów nie wi
ę
kszych ni
ż
E-24
(tj. dokładno
ść
nie lepsza ni
ż
5%). Na płytce drukowanej (rys. 4.1.3.1) dla
rezystorów „programuj
ą
cych” R
5
i R
6
przewidziano równoległe miejsca lutownicze,
tak
ż
e ka
ż
dy z rezystorów mo
ż
e stanowi
ć
równoległe poł
ą
czenie dwóch
rezystorów z szeregu 5% w celu uzyskania dowolnego stabilizowanego napi
ę
cia
wyj
ś
ciowego.
2. Schemat ideowy układu z naniesionymi symbolami zgodnie z instrukcj
ą
do
ć
wiczenia i obliczonymi warto
ś
ciami elementów.
3. Na papierze milimetrowym przed
ć
wiczeniem nale
ż
y przygotowa
ć
i nanie
ść
odpowiednie
przewidywane
skale
mierzonych
warto
ś
ci
i
wielko
ś
ci
(
np. dla U
o
= f(I
o
), U
o
= f(U
I
), gdzie parametrem s
ą
odpowiednio U
I
, oraz I
O
). Ka
ż
d
ą
z charakterystyk lub rodzin
ę
charakterystyk nale
ż
y przygotowa
ć
na osobnym
wykresie (stronie).
4. Na
płytce
drukowanej
PCB
nale
ż
y
naszkicowa
ć
(
najlepiej
kolorami
),
rozmieszczenie wykorzystywanych elementów, zaznaczy
ć
ich symbole i warto
ś
ci
zgodnie ze schematem. Wskazówka - rys. 4.1.3.2.
9. 2.
Szablon
1.
Strona tytułowa (
http://qe.ita.pwr.wroc.pl/~zue/
)
2.
Na schemacie ideowym z pkt. 9.1. (2), nale
ż
y pozostawi
ć
miejsce na wpisanie
warto
ś
ci rezystancji rezystorów R
5
, R
6
i R
4
(opcjonalnie dla schematu z
rys. 4.1.2.1, rezystorów R
1
, R
2
, R
3
) uzyskanych w wyniku pomiaru multimetrem.
3.
Tabela wyników oblicze
ń
i pomiarów, oraz pomiarów wskazanych charakterystyk
stabilizatora opisanych w zadaniu laboratoryjnym pkt. 6.3.
Wzór w instrukcji do
ć
wiczenia str. 22-23.
4.
Samodzielnie przygotowane siatki wykresów w skali liniowej na papierze
milimetrowym jak to podano ju
ż
w pkt. 9.1 (3), lub odpowiednio przygotowane
wcze
ś
niej, wykonane na komputerze i wydrukowane.

- 19 -
5. Na ostatniej stronie szablonu sprawozdania nale
ż
y zamie
ś
ci
ć
wnioski i
spostrze
ż
enia. W tym celu nale
ż
y przygotowa
ć
jedn
ą
wolna stron
ę
zatytułowan
ą
„Wnioski i spostrze
ż
enia”.
6. W trakcie
ć
wiczenia nale
ż
y wykona
ć
spis u
ż
ytej aparatury i przyrz
ą
dów
pomiarowych wraz z ich symbolami i numerami inwentarzowymi.
7. Je
ś
li w zadaniu projektowym okre
ś
lono wi
ę
cej ni
ż
jedno napi
ę
cie i/lub pr
ą
d
stabilizowane, wówczas dla ka
ż
dego przypadku nale
ż
y wypełni
ć
osobn
ą
tabel
ą
wg.
wzoru podanego na str. 20-21 instrukcji
.
Sprawozdanie nale
ż
y wykona
ć
w czasie zaj
ęć
laboratoryjnych i odda
ć
prowadz
ą
cemu bezpo
ś
rednio po ich zako
ń
czeniu !!!
W celu sprawnego wykonania
ć
wiczenia i sporz
ą
dzenia sprawozdania, nale
ż
y przed planowym terminem zaj
ęć
starannie si
ę
przygotowa
ć
zgodnie z wytycznymi
. Ł
ą
cznie ze sprawozdanie
oddajemy „na papierze” cz
ęść
dotycz
ą
c
ą
zadania projektowo-obliczeniowego
zadanego przez prowadz
ą
cego !!!
Wszystkie strony sprawozdania i projektu
musz
ą
by
ć
ponumerowane, podpisane i spi
ę
te przed oddaniem prowadz
ą
cemu !
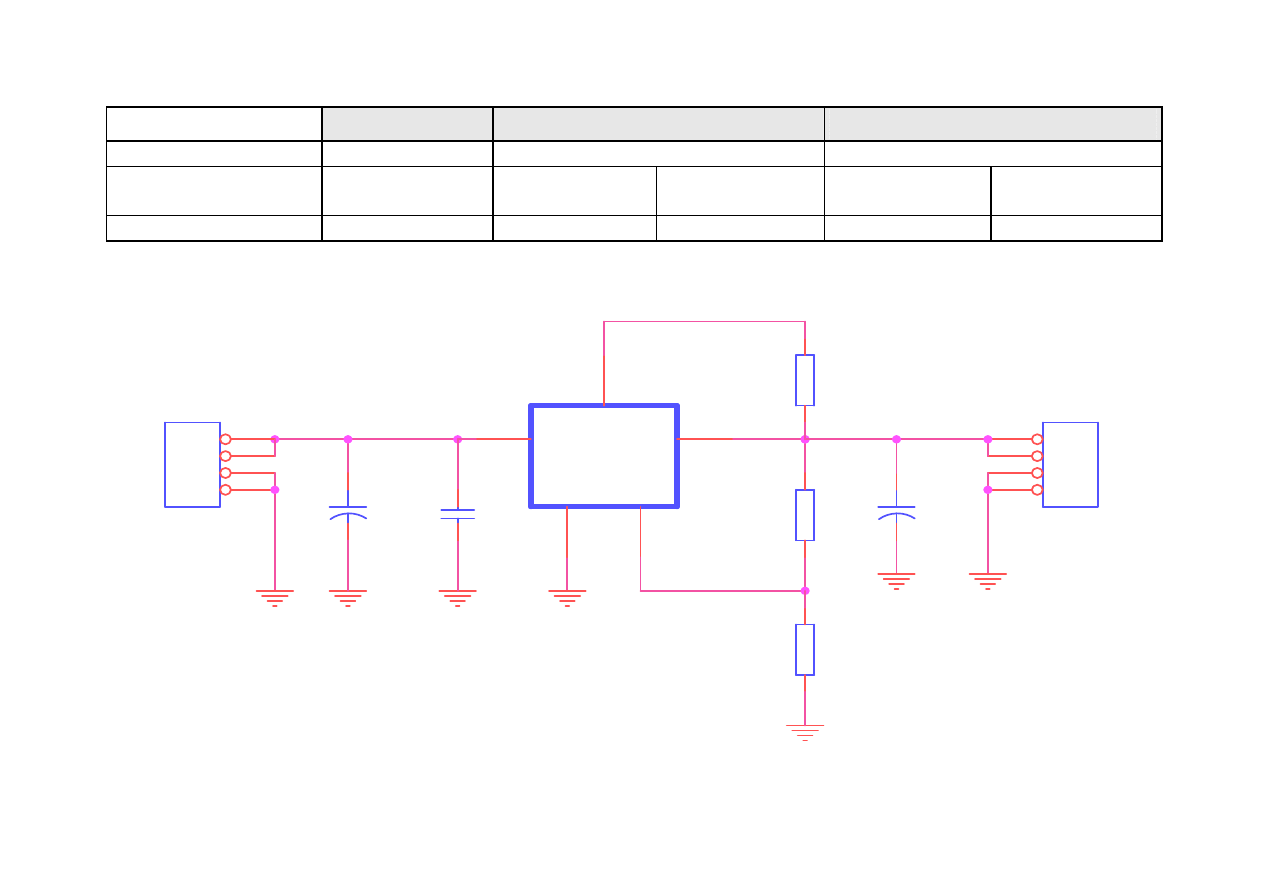
- 20 -
R4
R5
R6
Obliczone
Wybrane warto
ś
ci z
szeregu E-24
Zmierzone
Odpowiednie warto
ś
ci wpisujemy odpowiednimi kolorami zgodnie z pierwsz
ą
kolumn
ą
R4
0.47
R6
*
0
0
R5
*
IC1
L200C
1
5
3
4
2
IN
O
U
T
G
N
D
V
R
E
F
LIM
JP2
OUT
1
2
3
4
0
0
+
C3
220u/50
C2
220n
JP1
IN
1
2
3
4
0
0
0
+
C1
1000u/50
- 21 -
R2
R3
R4
R5
R6
Obliczone
Wybrane warto
ś
ci z
szeregu E-24
Zmierzone
Odpowiednie warto
ś
ci wpisujemy odpowiednimi kolorami zgodnie z pierwsz
ą
kolumn
ą
R0
10
0
+
C3
220u/50
0
+
-
IC2
LM741
3
2
6
7
4
JP1
IN
1
2
3
4
0
0
R4
0.47
C2
220n
R3
120
0
0
R1
1k
R6
820
JP2
OUT
1
2
3
4
IC1
L200C
1
5
3
4
2
IN
O
U
T
G
N
D
V
R
E
F
LIM
0
0
R2
100k
R5
4.7k
+
C1
1000u/50
- 22 -
Pomiary charakterystyki U
o
=
ƒƒƒƒ
(U
I
)
U
o dla R
L
=
∞
=
U
o dla R
L
=
∞
=
U
o dla R
L
=
∞
=
U
o dla R
L
=
∞
=
U
o dla R
L
=
∞
=
U
o dla R
L
=
∞
=
U
o dla R
L
=
∞
=
R
L
=
R
L
=
R
L
=
R
L
=
R
L
=
R
L
=
R
L
=
S
U
=
S
U
=
S
U
=
S
U
=
S
U
=
S
U
=
S
U
=
U
I
[V]
U
o
[V]
U
I
[V]
U
o
[V] U
I
[V]
U
o
[V]
U
I
[V]
U
o
[V]
U
I
[V]
U
o
[V]
U
I
[V]
U
o
[V]
U
I
[V]
U
o
[V]
- 23 -
Pomiary charakterystyki U
o
=
ƒƒƒƒ
(I
O
)
U
o dla R
L
=
∞
=
U
o dla R
L
=
∞
=
U
o dla R
L
=
∞
=
U
o dla R
L
=
∞
=
U
o dla R
L
=
∞
=
U
o dla R
L
=
∞
=
U
o dla R
L
=
∞
=
U
I
=
U
I
=
U
I
=
U
I
=
U
I
=
U
I
=
U
I
=
S
R
L
=
S
R
L
=
S
R
L
=
S
R
L
=
S
R
L
=
S
R
L
=
S
R
L
=
U
o
[V]
I
o
[mA]
U
o
[V]
I
o
[mA]
U
o
[V]
I
o
[mA]
U
o
[V] I
o
[mA]
U
o
[V]
I
o
[mA] U
o
[V]
I
o
[mA]
U
o
[V]
I
o
[mA]
Wyszukiwarka
Podobne podstrony:
liniowe stabilizatory napiecia (2)
liniowe stabiliatory napiecia
liniowe stabilizatory napiecia i pradu
3 STABILIZATORY NAPIECIA STALE Nieznany
cw4 Stabilizator napiecia z dio Nieznany
4 Stabilizacja napiecia id 373 Nieznany (2)
3 STABILIZATORY NAPIECIA STALE Nieznany
stabilizatory napiecia
MCP1700 stabilizatory napiecia
Ćw 10 Stabilizatory napięć i pr±dów stałych
Algebra liniowa1 id 57289 Nieznany
Stabilizator napięcia i prądu stałego
Badanie stabilizatorów napięcia, Impulsowy stabilizator napięcia, Cel i przeznaczenie
Badanie stabilizatorów napięcia, stabilizator (GOTOWE), Mirosław Dziewit GR
Badanie stabilizatorów napięcia, SCIAGAII, Układy stabilizacyjne
prezentacja 3 stabilnosc finans Nieznany
więcej podobnych podstron