
Marian OSTWALD
PODSTAWY MECHANIKI
MECHANIKA TECHNICZNA
DLA STUDENTÓW
KIERUNKÓW NIEMECHANICZNYCH
Materiały z wykładów
Wersja 04
Maj 2010
Politechnika Poznańska

01 Wprowadzenie do mechaniki
2
SPIS TREŚCI
1. Wprowadzenie ................................................................................. 1
2. Statyka ........................................................................................... 10
3. Statyka
– przykłady do rozwiązania ............................................... 38
4. Kinematyka .................................................................................... 39
5. Dynamika ....................................................................................... 63
6. Drgania
– wprowadzenie ............................................................... 82
7.
Wytrzymałość materiałów – charakterystyka ................................. 87
8.
Pręty, układy prętów ....................................................................... 91
9.
Momenty bezwładności ................................................................ 102
10.
Stany naprężenia i odkształcenia. Hipotezy wytrzymałościowe ... 108
11.
Skręcanie wałów okrągłych .......................................................... 110
12. Zginanie belek .............................................................................. 117
13.
Wytrzymałość złożona ................................................................. 135
14. Zagadnienia wybrane ................................................................... 141
Opanowanie
materiału z przedmiotu MECHANIKA TECHNICZNA wymaga
działań na dwóch płaszczyznach:
– poznanie i zrozumienia podstaw teoretycznych,
– nabycie praktycznych umiejętności posługiwaniem się wiedzą teoretyczną.
Podstawy teoretyczne to przede wszystkim przyswojenie i zrozumienie
podstawowych pojęć związanych z przedmiotem, nabycie umiejętności kojarze-
nia oraz zastosowania omawianych zagadnień. To również „wiedza” o tym,
gdzie w lite
raturze można znaleźć szczegółowe informacje (wzory, procedury,
przykłady).
Niniejszy materiał zawiera materiał prezentowany na wykładach i stanowi
rodzaj przewodnika
umożliwiający opanowanie podstaw teoretycznych. Umie-
jętności praktyczne nabyć można poprzez analizę przykładów liczbowych, a
przede wszystkim przez SAMODZIELNE ROZWIĄZYWANIE ZADAŃ. Cechą
zawodu
inżyniera jest praktyczne wykorzystywanie swojej wiedzy i umiejętności
w działalności zawodowej, stąd studiowanie MECHANIKI TECHNICZNEJ wy-
maga uwzględnienia obu tych aspektów.
LITERATURA
UZUPEŁNIAJACA
[1] Kozak B.: Mechanika techniczna. WSiP, Warszawa2004.
[2]
Niezgodziński T.: Mechanika ogólna. Wydawnictwo Naukowe PWN, War-
szawa 1999
[3]
Ostwald M.: Podstawy wytrzymałości materiałów. Wydawnictwo Politechniki
Poznańskiej, Poznań 2007.
[4] Ostwald M.:
Wytrzymałość materiałów. Zbiór zadań. Wydawnictwo Poli-
techniki Poznańskiej, Poznań 2008
[5] Siuta W.: Mechanika techniczna. WSiP, Warszawa.
01 Wprowadzenie do mechaniki
3
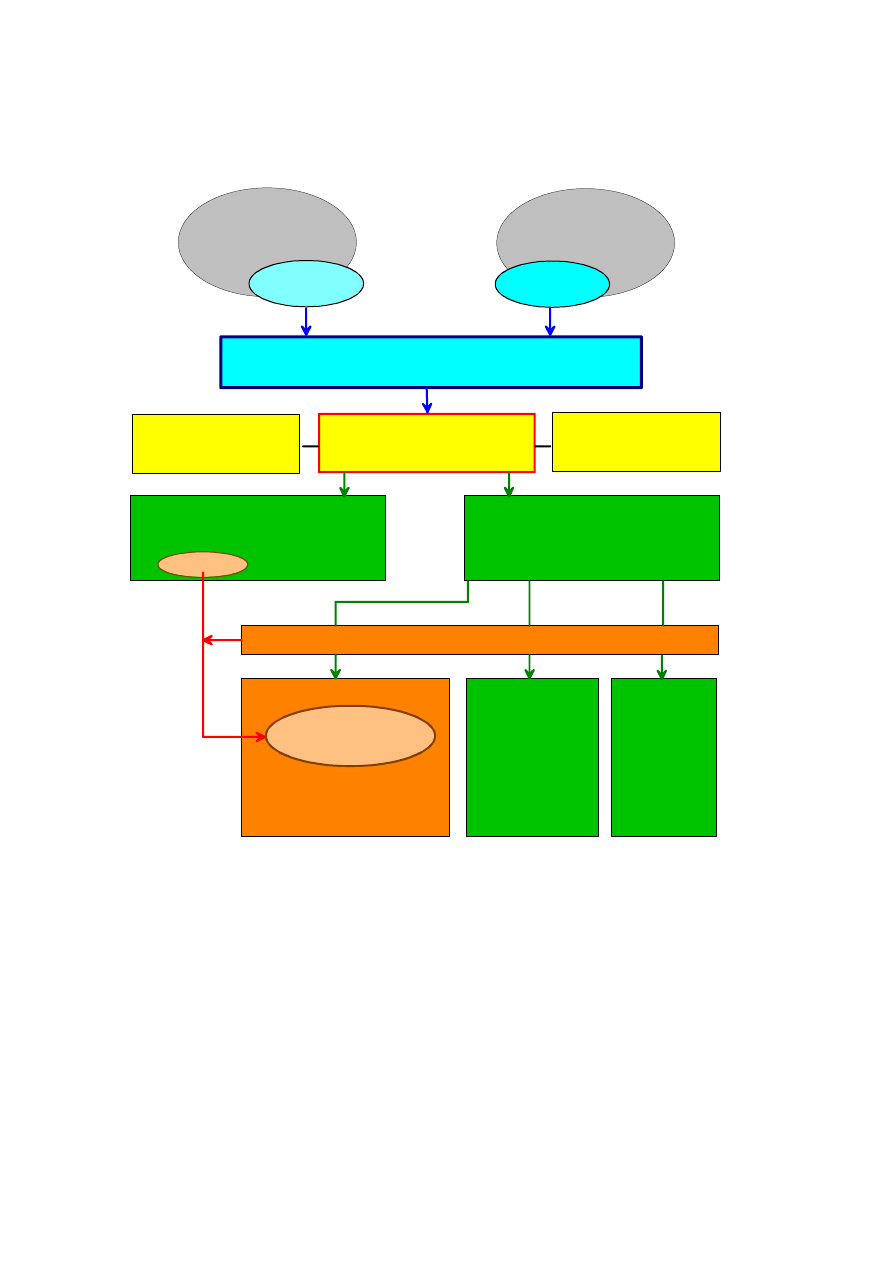
MECHANIKA TECHNICZNA
Struktura przedmiotu
MECHANIKA
TEORETYCZNA (OGÓLNA)
Fizyka
Matematyka
Mechanika
relatywistyczna
(skala makro, E = mc
2
)
Mechanika
kwantowa
(skala mikro, chaos)
MECHANIKA
STOSOWANA (TECHNICZNA)
(newtonowska)
MECHANIKA
PŁYNÓW:
- hydromechanika
- aeromechanika
MECHANIKA
GRUNTÓW
(budownictwo)
MECHANIKA CIAŁA SZTYWNEGO:
- dynamika
- kinematyka
-
statyka
Doświadczenie
Obserwacja
rzeczywistości
Metody i pojęcia
matematyki
do badania zjawisk
MECHANIKA CIAŁ STAŁYCH
WYTRZYMAŁOŚĆ
MATERIAŁÓW:
MECHANIKA CIAŁ
ODKSZTAŁCALNYCH:
- teoria sprężystości
- teoria plastyczności
- reologia
- .............
Mechanika należy do najstarszych dziedzin ludzkiej aktywności. Początki mecha-
niki sięgają starożytnego Babilonu, starożytnej Grecji, Egiptu i Rzymu. Podstawy me-
chaniki jako nauki ścisłej w starożytności tworzyli m. in. Arystoteles ((384-322 p.n.e.),
Archimedes (287-212 p.n.e) i Ptolemeusz (II w n.e.). G
wałtowny rozwój mechaniki na-
stąpił w średniowieczu i związany jest z takimi nazwiskami jak Leonardo da Vinci (1452
-1519), Galieo Galilei (Galileusz 1564-1642), Ren
é Descarte (Kartezjusz 1596-1650)
Isaac Newton (1642-1727, autor "Philosophiae naturalis principia mathematica", Lon-
dyn, 1687r.), Pierre Varigon (1654-1722), Jan Bernoulli (1667-1748),
Michał Łomono-
sow (1711-1765), Leonard Euler (1701-1783), Jean D'Alambert (1717-1783), Ludwig
Lagrange (1737-1813) i wielu innych.
Twórcami mechaniki kwantowej byli m. in. Max
Planck (1858-1947) i Erwin Schr
ödinger (1887-1961), mechaniki relatywistycznej jest
Albert Einstein (1879-1955).
Spośród polskich uczonych którzy wnieśli znaczący wkład do rozwoju mechaniki
na
leży wymienić Mikołaja Kopernika (1473-1543), Feliksa Jasińskiego (1856-1899),
Maksymiliana Tytusa Hubera (1872-1950), Stefana Banacha (1895-1945) i innych.

01 Wprowadzenie do mechaniki
4
MECHANIKA TECHNICZNA
Mechanika jest dziedziną nauki zajmującą się badaniem ru-
chu i równowagi ciał materialnych. Ciało materialne jest
myślowym uproszczeniem ciała rzeczywistego. Modele:
punkt materialny
u
kład punktów materialnych
c
iało sztywne
TRADYCYJNY PODZIAŁ MECHANIKI:
STATYKA
– badanie warunków równowagi ciał w spo-
czynku.
KINEMATYKA
– badanie ruchu ciał bez analizy przyczyn
tego ruchu.
DYNAMIKA
– analiza oddziaływań między ciałami oraz
ich skutków.
Ciało doskonale sztywne stanowi przybliżony model cia-
ła stałego i wystarcza do rozwiązywania wielu ważnych
w
praktyce inżynierskiej przypadków ruchu i równowagi.
Podstawowe jednostki miar wielkości fizycznych
układ SI
długość: metr
m
masa: kilogram
kg
czas: sekunda
s
natężenie prądu: amper
A
temperatura: kelwin
K
ilość materii: mol
mol
światłość: kandela
cd
kąt płaski: radian
rd
kąt bryłowy: steradian
sr
Jednostki pochodne w mechanice:
prędkość =
długość (droga)
m
czas
s
praca =
siła
długość (droga)
N
m
moc
=
praca
N
m
= W
czas
s
01 Wprowadzenie do mechaniki
5
SKALARY
Liczby mianowane
Skalary są pojęciami opisującymi wartość liczbową wielkości fizycznej (me-
chanicznej)
poprzez porównanie jej ze wzorcem (np. długość, masa, temperatu-
ra, praca, moc itp.). Ska
larami są także wartości liczbowe (moduły) wektorów.
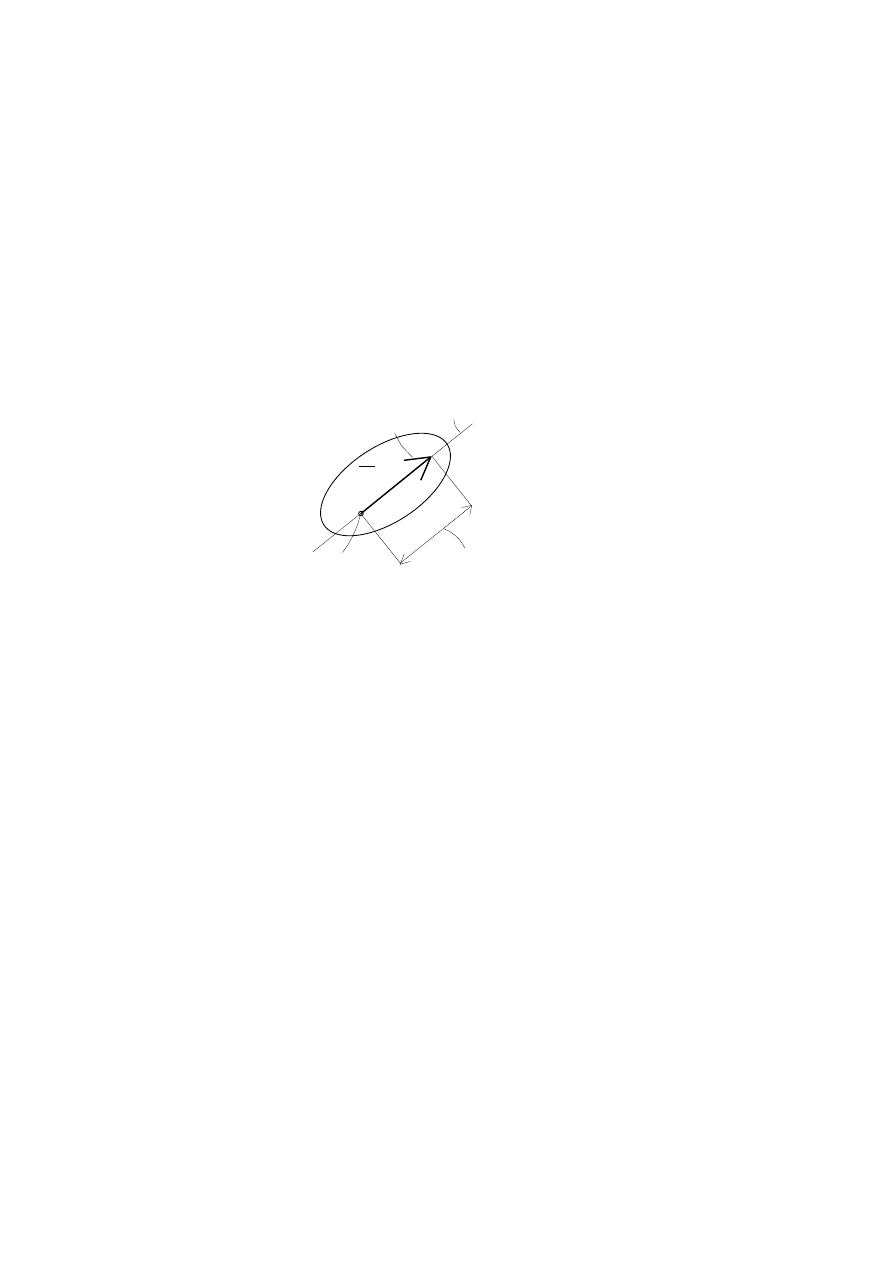
WEKTORY
wartość liczbowa (moduł)
kierunek w przestrzeni
zwrot na kierunku działania
punkt przyłożenia.
P
Kierunek działania
Zwrot
Wartość liczbowa (moduł)
Punkt przyłożenia
Wektor siły skupionej
Wektor jest obiektem geometrycznym opisanym za pomocą ww. czterech
parametrów. Przykłady wektorów: siła, moment siły, pęd, prędkość, przyspie-
szenie i. in.
RACHUNEK WEKTOROWY
Dział matematyki (geometrii analitycznej), analizujący działania na wekto-
rach (uogólnienia skalara) oraz tzw. tensorach (uogólnienie pojęcia wektora).
Rachune
k wektorowy jest bardzo przydatny w rozwiązywaniu wielu zagadnień
z mechaniki.
PODSTAWOWE POJĘCIA MECHANIKI
SIŁA – wynik wzajemnego mechanicznego oddzia-
ływania na siebie ciał (oddziaływanie bezpośrednie).
Siły zewnętrzne czynne i bierne (reakcje), wewnętrzne
Siły skupione, rozłożone liniowo, powierzchniowo, obję-
tościowo
Szersza definicja:
siła to wynik oddziaływań fizycznych ciał na siebie.
Pozwala to na wprowadzenie pojęcia sił elektrodynamicznych (magnetycznych),
działających na przewodniki umieszczone w polu magnetycznym, przez które
płynie prąd elektryczny, (maszyny elektryczne). Jest oddziaływanie pośrednie
(inny przykład – oddziaływanie magnesów).
01 Wprowadzenie do mechaniki
6
CIAŁA SWOBODNE
Stopnie swobody
CIAŁA NIESWOBODNE
Więzy (ograniczenia) ograniczające ruch
CIAŁA SWOBODNE
Ciało swobodne może się przemieszczać dowolnie w przestrzeni. W przy-
padku ogólnym ciało swobodne ma sześć stopni swobody. Oznacza to, że
mo
że się przemieszczać liniowo w trzech kierunkach oraz obracać względem
trzech osi.
CIAŁA NIESWOBODNE
Ciało nieswobodne nie ma możliwości dowolnego (swobodnego) prze-
mieszczania się w przestrzeni. Przemieszczanie ciała jest ograniczone przez
nałożone na ciało więzy.
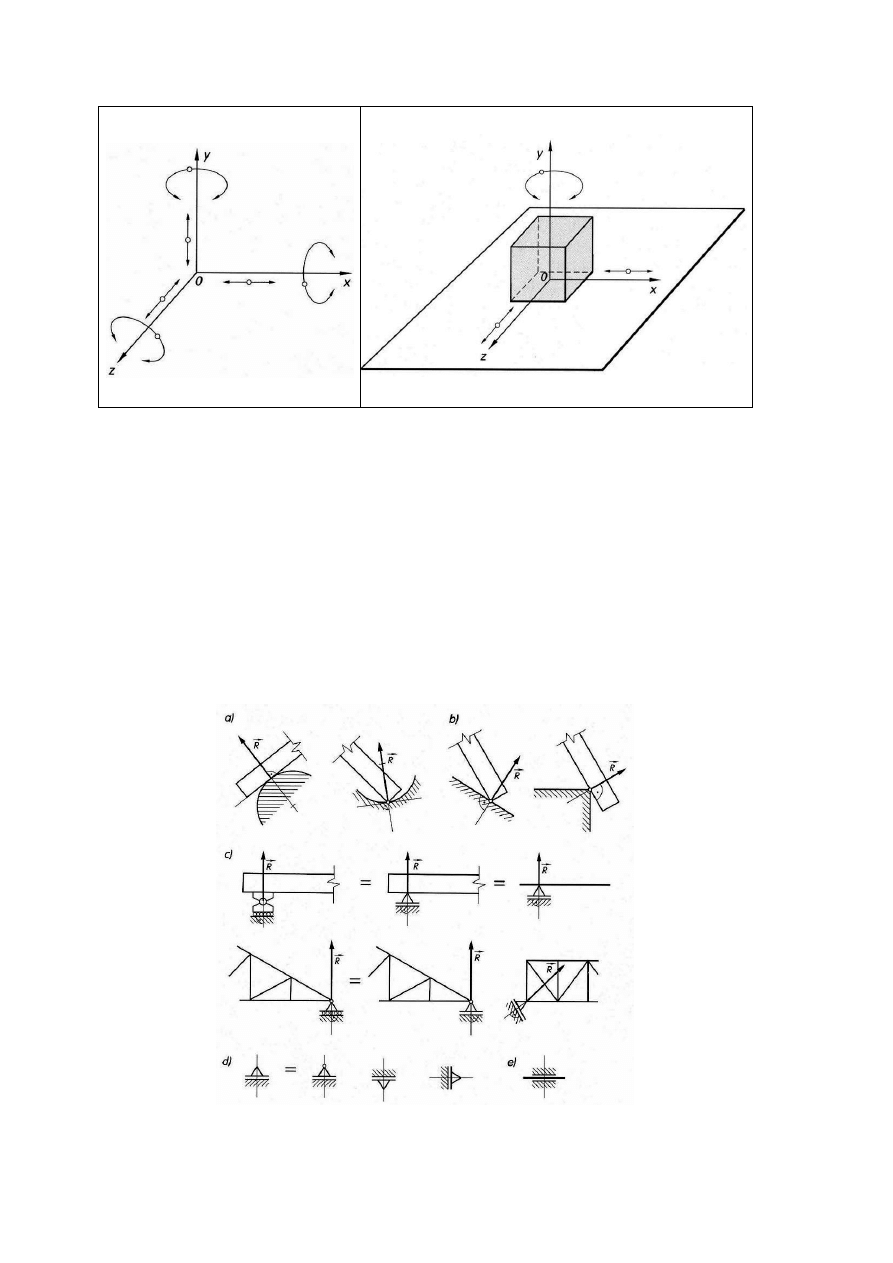
Więzy (ograniczenia) ograniczające ruch
Przykłady podpór ruchomych w statyce
01 Wprowadzenie do mechaniki
7
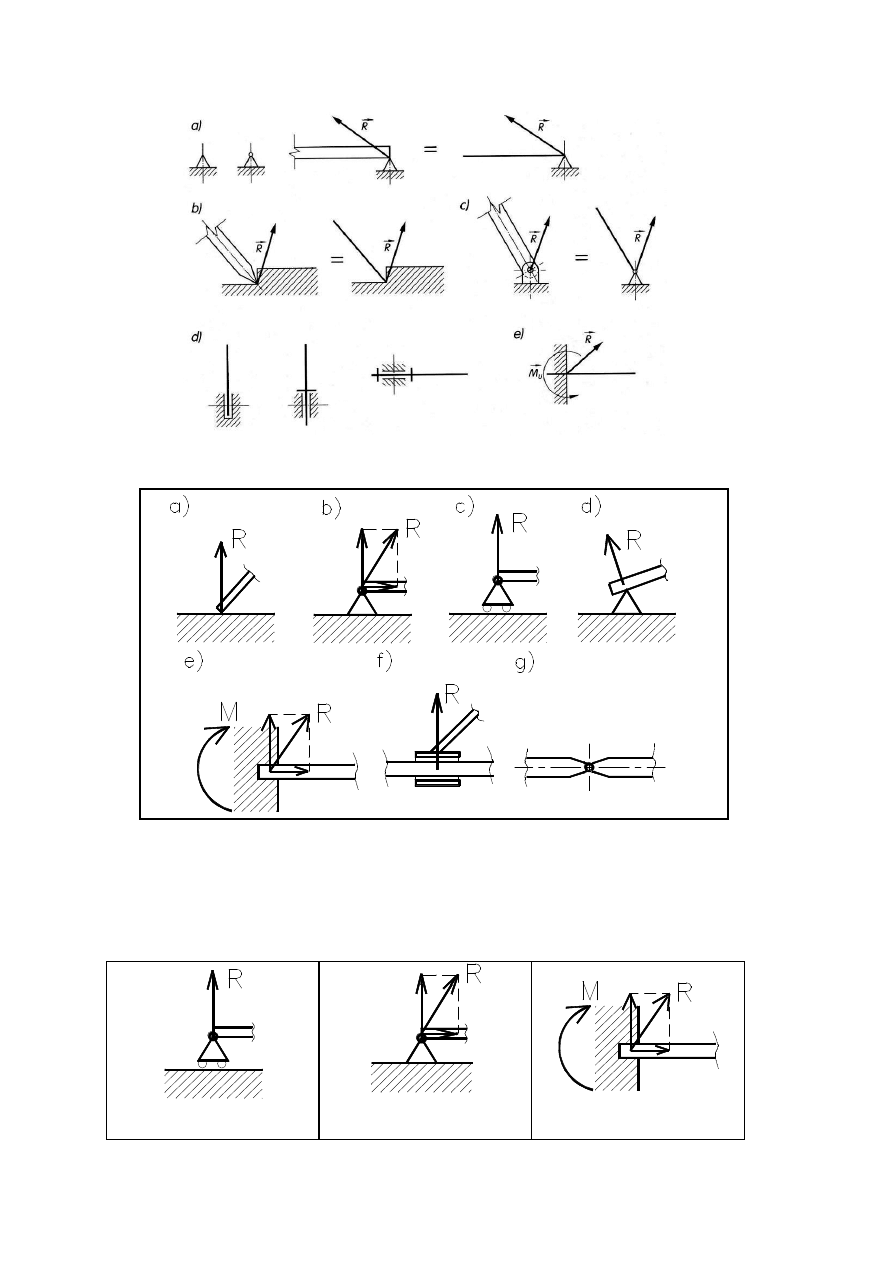
Przykłady podpór nieruchomych w statyce
Przykłady podparcia konstrukcji oraz reakcje podporowe:
a) pręt spoczywający na podłożu, b) podparcie przegubowe nieprzesuwne,
c) podparcie przegubowe przesuwne, d) ostrze, e) utwierdzenie, f) tuleja prze-
suwna, g) przegub po
średni
PODSTAWOWE WIĘZY W MECHANICE
Przegub ruchomy
Przegub nieruchomy
Utwierdzenie
01 Wprowadzenie do mechaniki
8
Podstawą mechaniki są trzy prawa Newtona, sformuło-
wane w 1687 r., mające fundamentalne znaczenie
w
mechanice i wytrzymałości materiałów.
I prawo Newtona
(prawo
bez
władności)
Punkt materialny, na który nie działa
żadna siła, pozostaje w spoczynku lub
porusza się ruchem jednostajnym po
linii prostej.
Właściwość ciał materialnych, polegająca na zachowy-
waniu swego stanu
– ruchu jednostajnego prostoliniowego,
a w szc
zególności stanu spoczynku, nazywa się bezwład-
nością.
II prawo Newtona
(prawo
zmienności ruchu)
Przyspieszenie punktu materialnego
jest pro
porcjonalne do siły działającej
na ten punkt i ma kie
runek siły.
Matematycznie II prawo Newtona zapisuje się w postaci
wektorowej:
P
=
a
m
,
gdzie m jest współczynnikiem proporcjonalności zwanym
masą. Masa jest miarą bezwładności, czyli właściwości
materii polegającej na tendencji do zachowywania stanu ru-
chu lub spoczynku. Masa jest wielkością skalarną charakte-
ryzującą ciało.
III prawo Newtona
(prawo akcji
i reakcji)
Siły wzajemnego oddziaływania
dwóch punktów materialnych są rów-
ne co do wartości i są przeciwnie
skierowane wzdłuż prostej łączącej
oba punkty.
01 Wprowadzenie do mechaniki
9
ZAKRES ZASTOSOWANIA MECHANIKI NEWTONA
(NIUTONOWSKIEJ)
Mechanika oparta o prawa Newtona w zupełności wystar-
cza do opisu wszystkich zjawisk mechanicznych, w których
występują prędkości znacznie niższe od prędkości światła
– dotyczy to inżynierskich zastosowań mechaniki w budo-
wie maszyn i budownictwie.
JEDNOSTKI MASY I SIŁY
2
2
s
m
kg
1
s
m
1
kg
1
N
1
niuton
1
1 kN = 10
3
N,
1 MN = 10
3
kN = 10
6
N
ZWIĄZEK MIĘDZY MASĄ A CIĘŻAREM
Siła ciężkości – siła z jaką Ziemia przyciąga
dane ciało materialne
Ciężar ciała = masa
przyspieszenie ziemskie
G = m
g
g = 9,81 m/s
2
m
g = 1kg
9,81 m/s
2
= 9,81 kg
m/s
2
= 9,81 N
Ciężar ciała o masie 1 kg wynosi 9,81 N.
ZWIĄZEK MIĘDZY MASĄ I CIĘŻAREM
Ciało 1: ciężar G
1
, masa m
1
Ciało 2: ciężar G
2
, masa m
2
G
1
= m
1
g,
G
2
= m
2
g,
2
1
2
1
m
m
G
G
Stosunek dwóch ciężarów jest równy stosunkowi ich mas.
Jest to podstawa pomiaru masy ciała za pomocą ważenia
(porównania ze wzorcem).
Wyszukiwarka
Podobne podstrony:
Mechanika Techniczna I Skrypt 2 4 Kinematyka
Mechanika Techniczna I Skrypt 4 2 4 Układ belkowy złożony
Mechanika Techniczna I Skrypt 1 2 1 Okreslenie i rodz
Mechanika Techniczna I Skrypt 5 03
Mechanika Techniczna I Skrypt 3 14
Mechanika Techniczna I Skrypt 5 02
Mechanika Techniczna I Skrypt 3 7
Mechanika Techniczna I Skrypt 3 1
Mechanika Techniczna I Skrypt przyklady do rozwiazania id 291
Mechanika Techniczna I Skrypt 2 8 Prety, układy pretów
Mechanika Techniczna I Skrypt 5 10
Mechanika Techniczna I Skrypt 5 06
Mechanika Techniczna I Skrypt 3 12
Mechanika Techniczna I Skrypt 2 14 Zagadnienia wybrane
Mechanika Techniczna I Skrypt 1 7 1 Przedmiot dynamiki
Mechanika Techniczna I Skrypt 5 08
Mechanika Techniczna I Skrypt 3 9
Mechanika Techniczna I Skrypt 3 15
Mechanika Techniczna I Skrypt 1 2 7 Pochodna funkcji wektorowej
więcej podobnych podstron