
Instrukcja do ćwiczenia nr 6 z Laboratorium Automatyki
1
Ćwiczenie 6.
Serwonapęd – MRJ3A
Instrukcja do ćwiczenia nr 6 z Laboratorium Automatyki
2
1. Program ćwiczenia
1. Poznawanie serwonapędu MRJ3A
2. Identyfikacja obiektu sterowania
3. Testowanie funkcji napędu
2. Obiekt regulacji
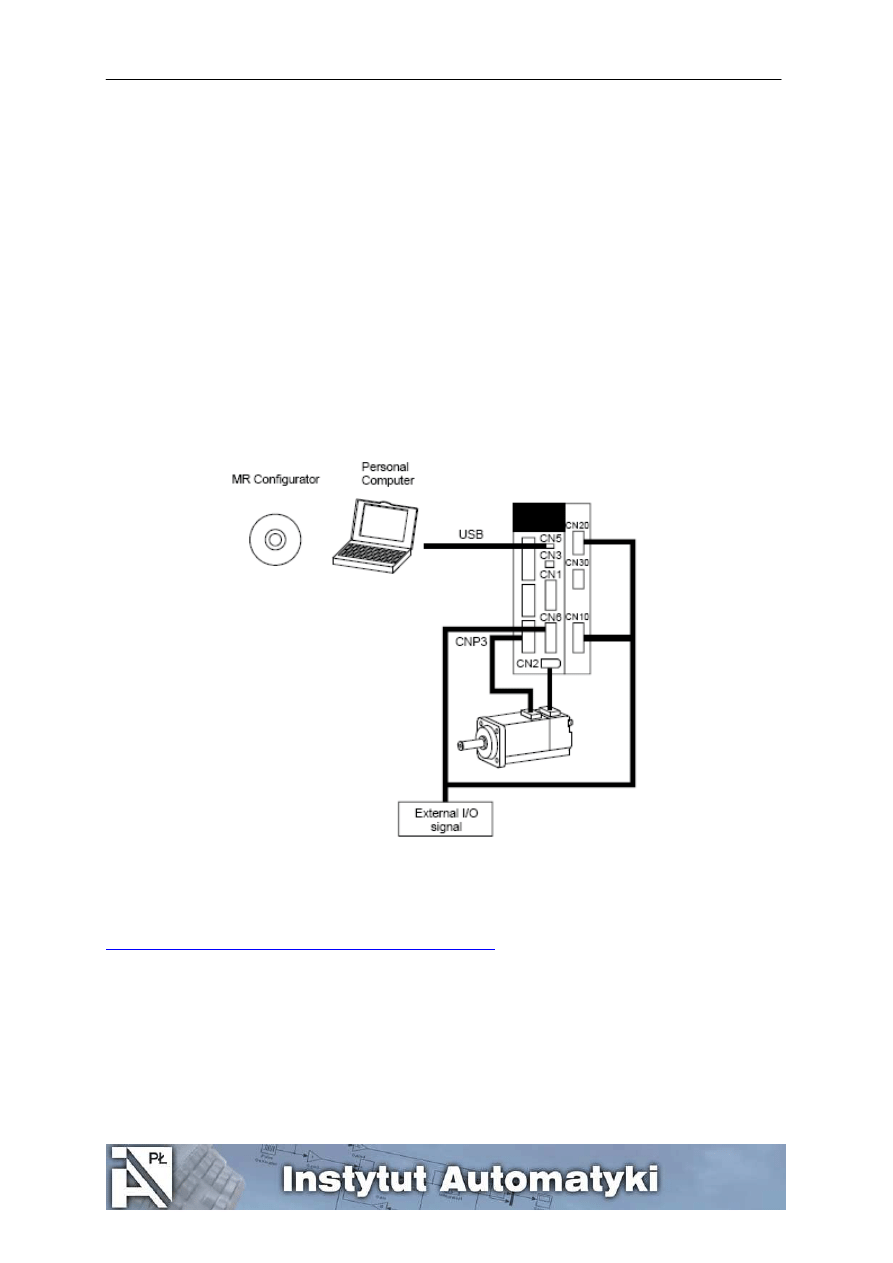
Stanowisko składa się z serwonapędu połączonego z PC poprzez złącze USB. Zainstalowane oprogramowanie
MR Configurator pozwala na identyfikację i sterowanie napędem. Silnik jest mechanicznie sprzęgnięty z
prądnicą obcowzbudną prądu stałego, która jest jego obciążeniem.
Rys.1. Połączenie komputera z serwonapędem
Więcej szczegółów dotyczących serwonapędów serii MRJ3 można znaleźć na stronie producenta
http://www.mitsubishi-automation.pl/products/servomotion.html
MRJ3A
Instrukcja do ćwiczenia nr 6 z Laboratorium Automatyki
3
3. Serwonapęd MRJ3A
W celu uruchomienia napędu należy
:
•
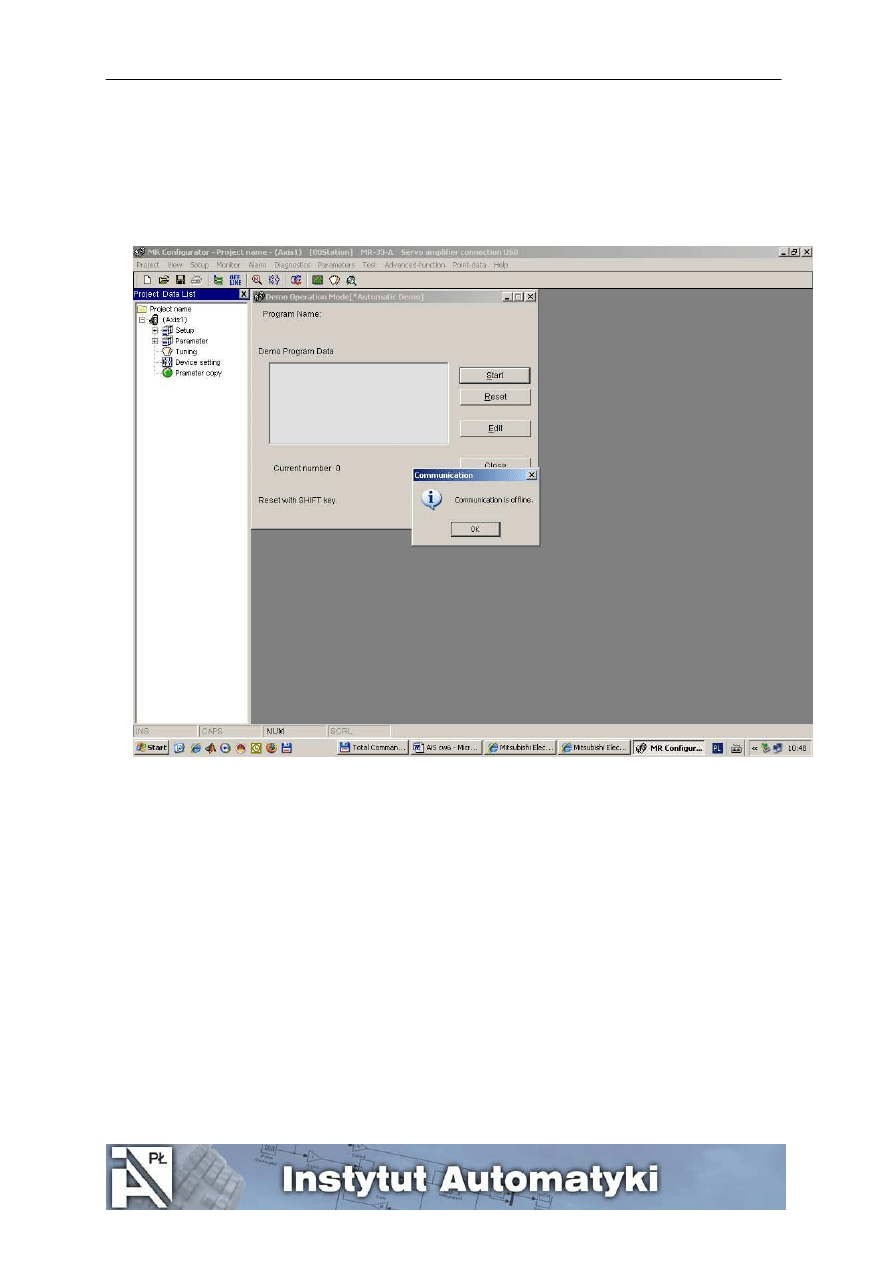
Włączyć zasilanie komputera (lewa listwa) i uruchomić MR configuratora SETUP221E z pulpitu.
Pojawi się ekran.
Ponieważ napęd nie jest podłączony do komputera pojawia się komunikat o pracy w trybie offline. Zamknąć
okno komunikatu i Demo Operation Mode.
•
Wczytać projekt o nazwie start.
•
Włączyć zasilanie falownika (prawa listwa). Powinien uruchomić się tryb pracy online.
•
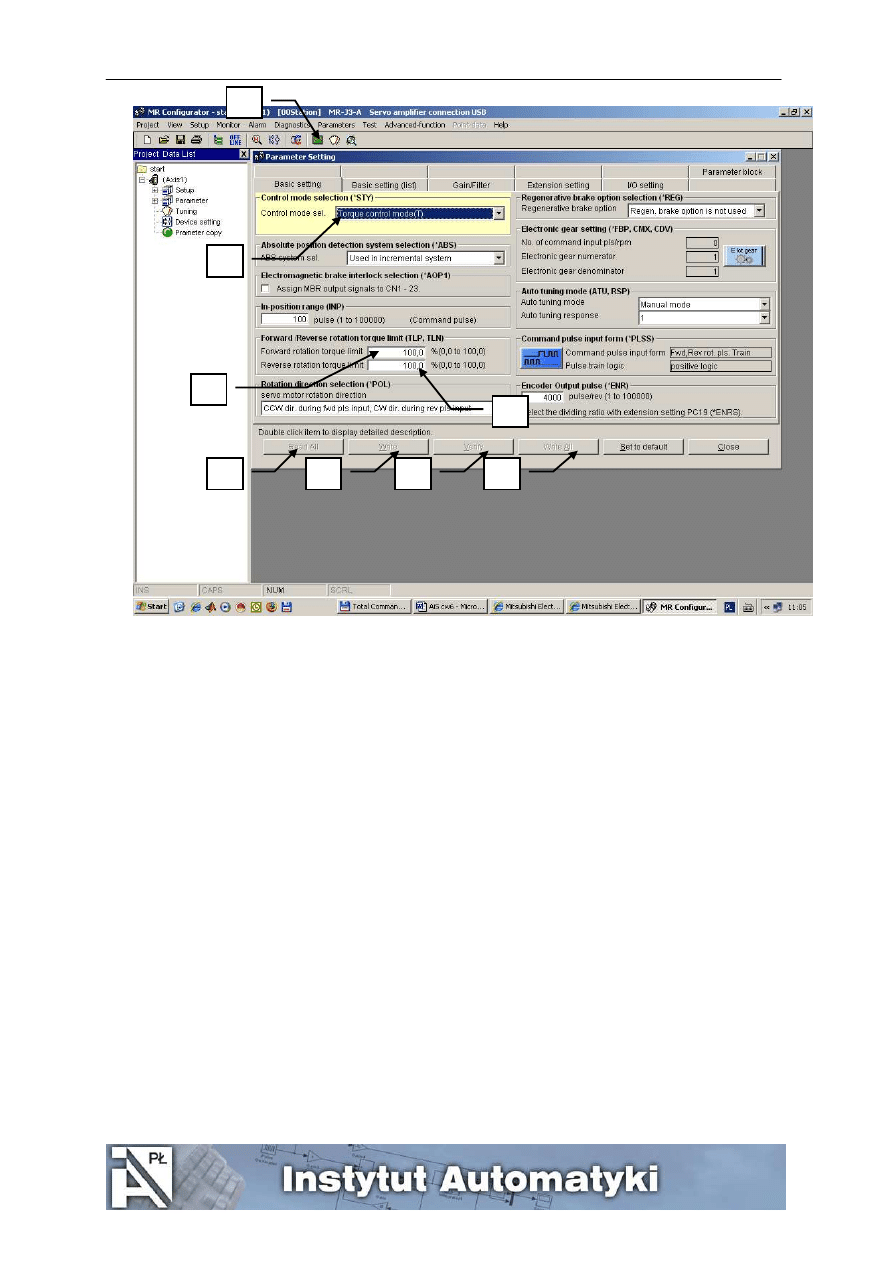
Z zakładki Parameters wybrać Parameter list ...
Instrukcja do ćwiczenia nr 6 z Laboratorium Automatyki
4
1. Tryb sterowania (lista rozwijana), tu: sterowanie momentem.
2. Ograniczenie momentu przy obrotach w przód.
3. Ograniczenie momentu przy obrotach w tył.
4. Wczytywanie parametrów napędu z falownika do komputera.
5. Wczytywanie pojedynczego parametru z komputera do falownika.
6. Porównanie parametrów ustawionych w falowniku i MR Configuratorze.
7. Wczytywanie wszystkich parametrów MR Configuratora do falownika.
8. Oscyloskop.
•
Wczytaj parametry do falownika (7), wyłącz zasilanie falownika i ponownie załącz (pojawi się
odpowiedni komunikat).
•
Uruchom oscyloskop (8)
•
Z zakładki Test wybierz Demo Mode ... i wczytaj plik demo.prg, uruchom oscyloskop.
8
1
2
3
4
5
6
7
Instrukcja do ćwiczenia nr 6 z Laboratorium Automatyki
5
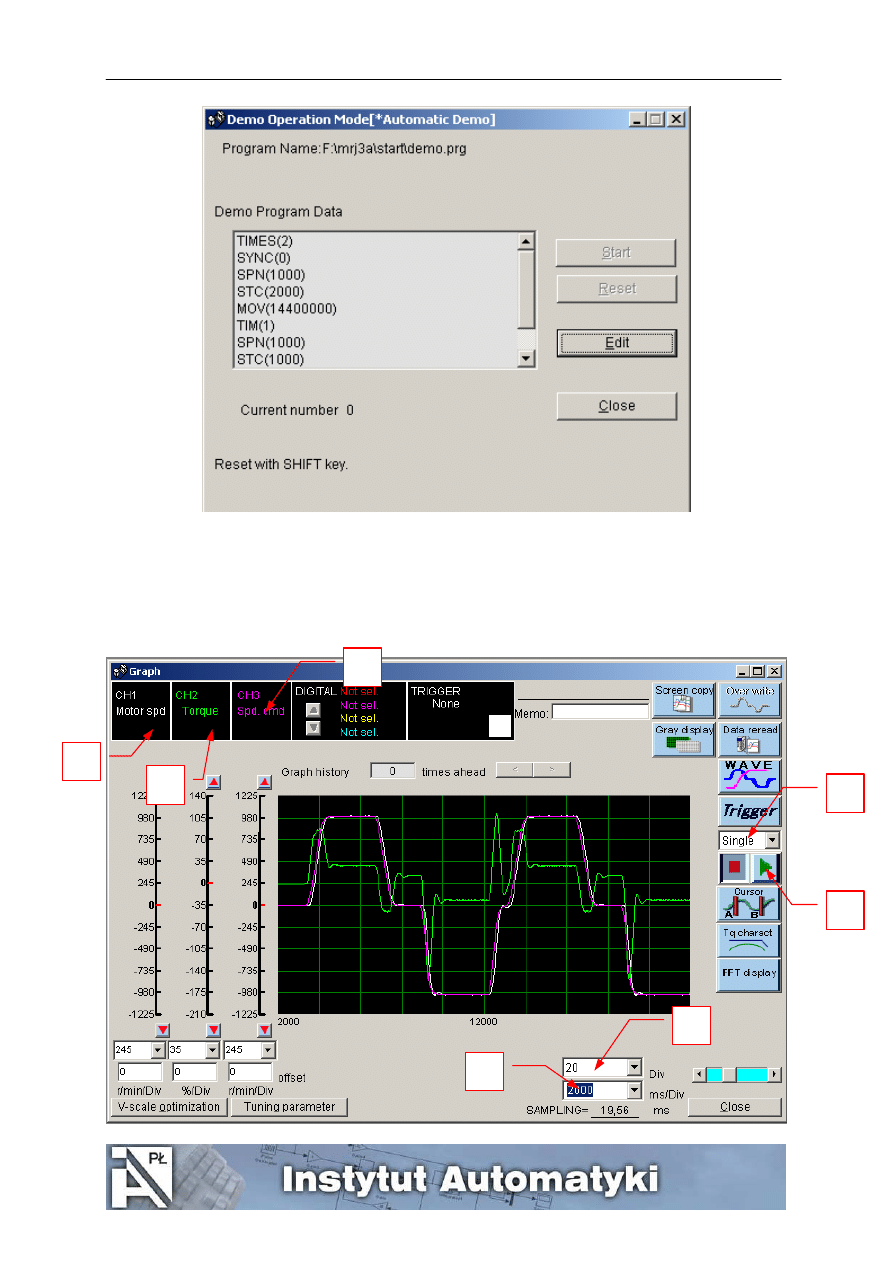
Dostępne są następujące komendy:
SPN() // ustawienie prędkości serwonapędu [obr/min]
STC() // czas hamowania i rozpędzania [ms]
MOV () // zadanie przesunięcie [impulsy]
SYNC() // oczekiwanie na sygnał zewnętrzny
TIM () // pauza [s]
TIMES () //ilość powtórzeń programu (pętla)
STOP
1
2
3
5
4
7
6
Instrukcja do ćwiczenia nr 6 z Laboratorium Automatyki
6
Na ekranie oscyloskopu ustaw wielkości zapisywane i tryb zapisu:
1. prędkość napędu
2. moment napędowy
3. zadana prędkość
4. tryb zapisu (single)
5. rozdzielczość (20)
6. czas zapisu (2000)
Uruchom zapis (7) i niezwłocznie uruchom demo. Po wykonaniu programu można zapisać wyniki w dwóch
formatach *.csv, *gpf.
Załącz obciążenie (przełącznik po prawej stronie stołu) i powtórz działanie demo.
Wyłącz obciążenie i zamknij okno demo.
4. Identyfikacja obiektu sterowania
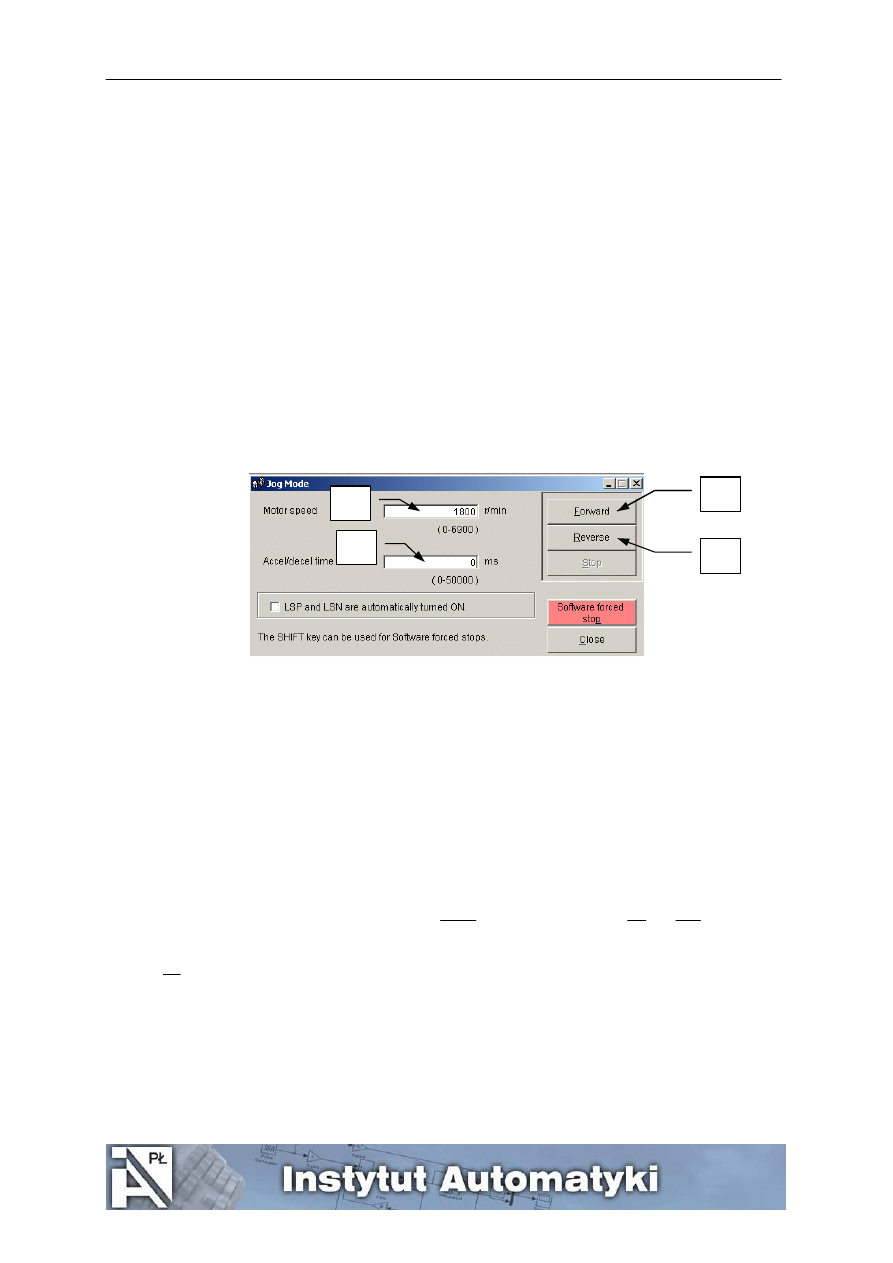
Z zakładki test wybierz Jog Mode i ustaw jak na rys. poniżej
1. uruchomienie napędu w przód
2. uruchomienie napędu w tył
3. prędkość silnika
4. czas przyspieszania
W zakładce Parameter Setting ustaw ograniczenie momentu przy obrotach w przód (2) na 5%. Uruchom napęd
w przód (1). Po ustaleniu prędkości obrotowej uruchom zapis w oscyloskopie i niezwłocznie zmień ograniczenie
momentu (2) na 6% i wczytaj do falownika (5). Po zarejestrowaniu przebiegów, zatrzymaj silnik, zapisz
przebiegi.
Przybliżyć badany obiekt odpowiednią transmitancją .... - jest to zadanie domowe.
Uwaga! Moment należy przeliczyć wg zależności
]
[
2
,
3
024
,
0
Nm
m
m
rej
=
, prędkość
ω
π
=
ω
s
rad
rej
60
2
,
czas
]
[s
a
t
t
rej
=
, gdzie a jest liczbą znajdującą się w drugim wierszu zapisanego pliku.
1
1
2
3
4
Instrukcja do ćwiczenia nr 6 z Laboratorium Automatyki
7
5. Obserwacja pracy napędu
Z zakładki test wybierz Jog Mode i ustaw prędkość silnika (3)
min
obr
1800
, czas przyspieszania
ms
1000
(4).
W zakładce Parameter Setting zmień ograniczenie momentu przy obrotach w przód (2) na 100%, lub liczbę z
przedziału (50-100)%.
Uruchom zapis i niezwłocznie uruchom napęd. Po około dwóch sekundach załącz obciążenie, po kolejnych
dwóch wyłącz obciążenie. Po zarejestrowaniu przebiegów, zatrzymaj silnik, zapisz przebiegi.
6. Testowanie innych funkcji napędu
•
Charakterystyka częstotliwościowa napędu
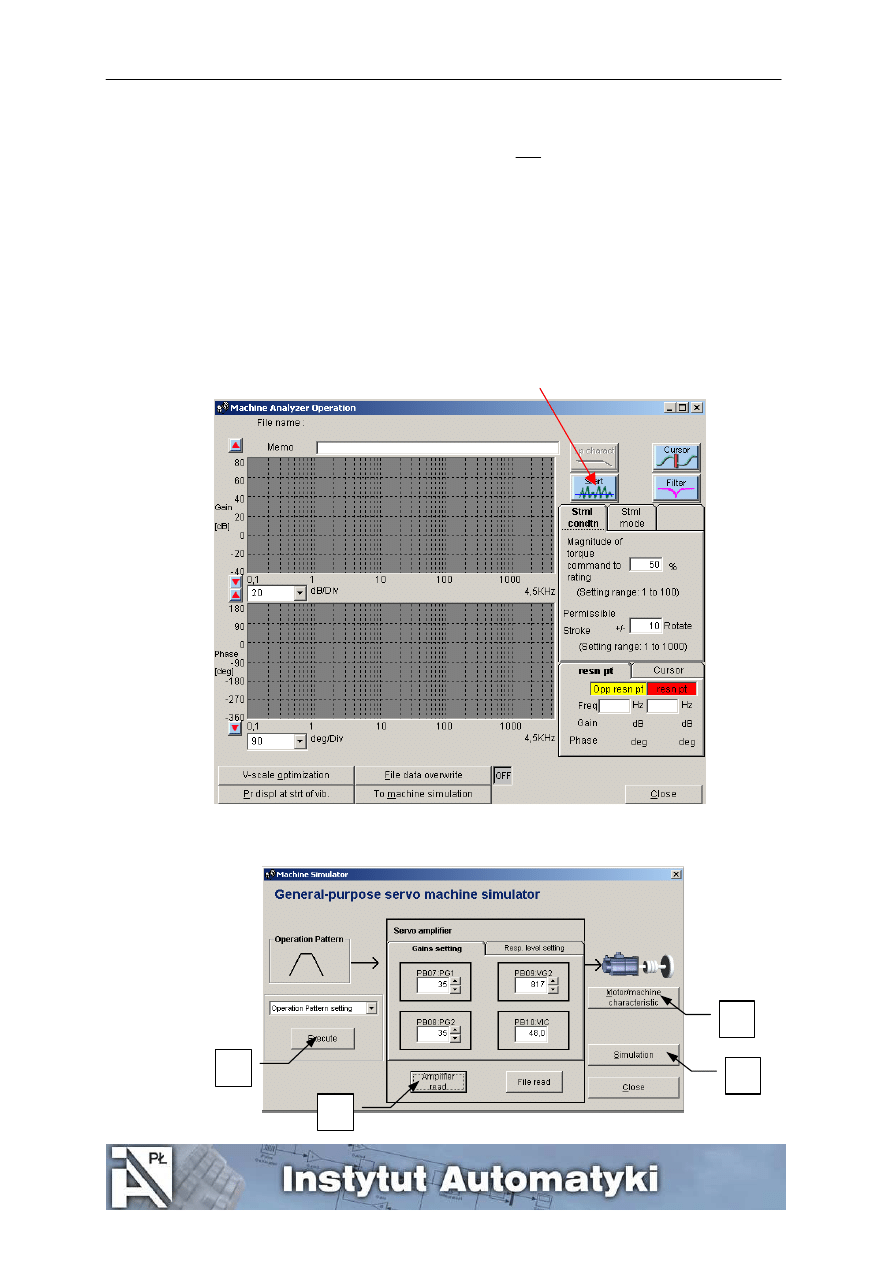
Z zakładki Advanced – function wybierz Machine analizer ... i uruchom.
•
Symulacja pracy napędu
Z zakładki Advanced – function wybierz Machine symulation ... i uruchom.
1
2
3
4
Instrukcja do ćwiczenia nr 6 z Laboratorium Automatyki
8
1. wczytywanie charakterystyki silnika
2. zadawanie trajektorii
3. wczytywanie parametrów regulatora z falownika do symulatora
4. uruchomienie symulacji
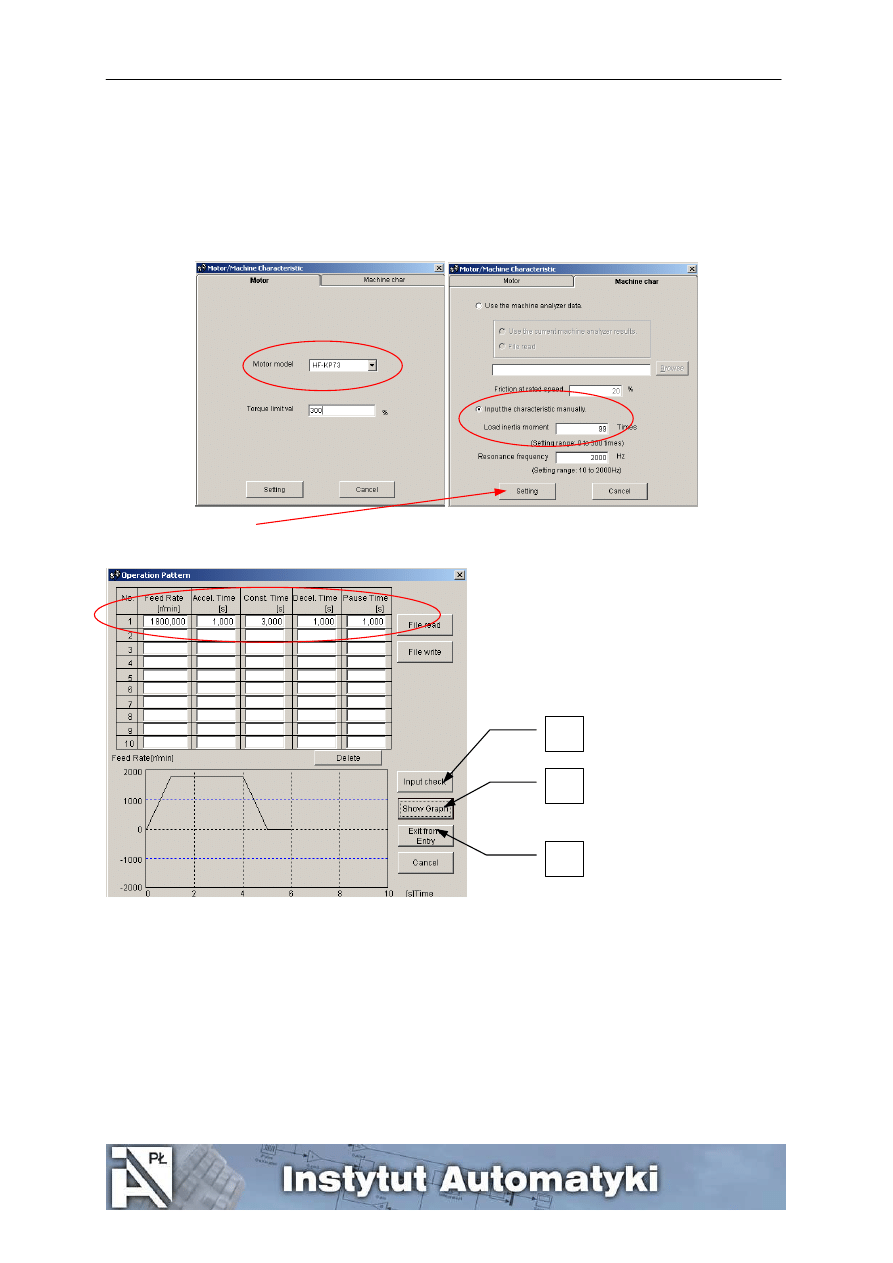
Do symulatora zostaną wczytane ustawienia domyślne regulatora. Wczytaj charakterystykę silnika (1) i ustaw w
zakładkach parametry jak na rys. poniżej
i wczytaj do symulatora
Następnie ustaw zadaną trajektorię
1. wczytaj trajektorię
2. wywołaj obraz trajektorii
3. wczytaj trajektorię do symulatora.
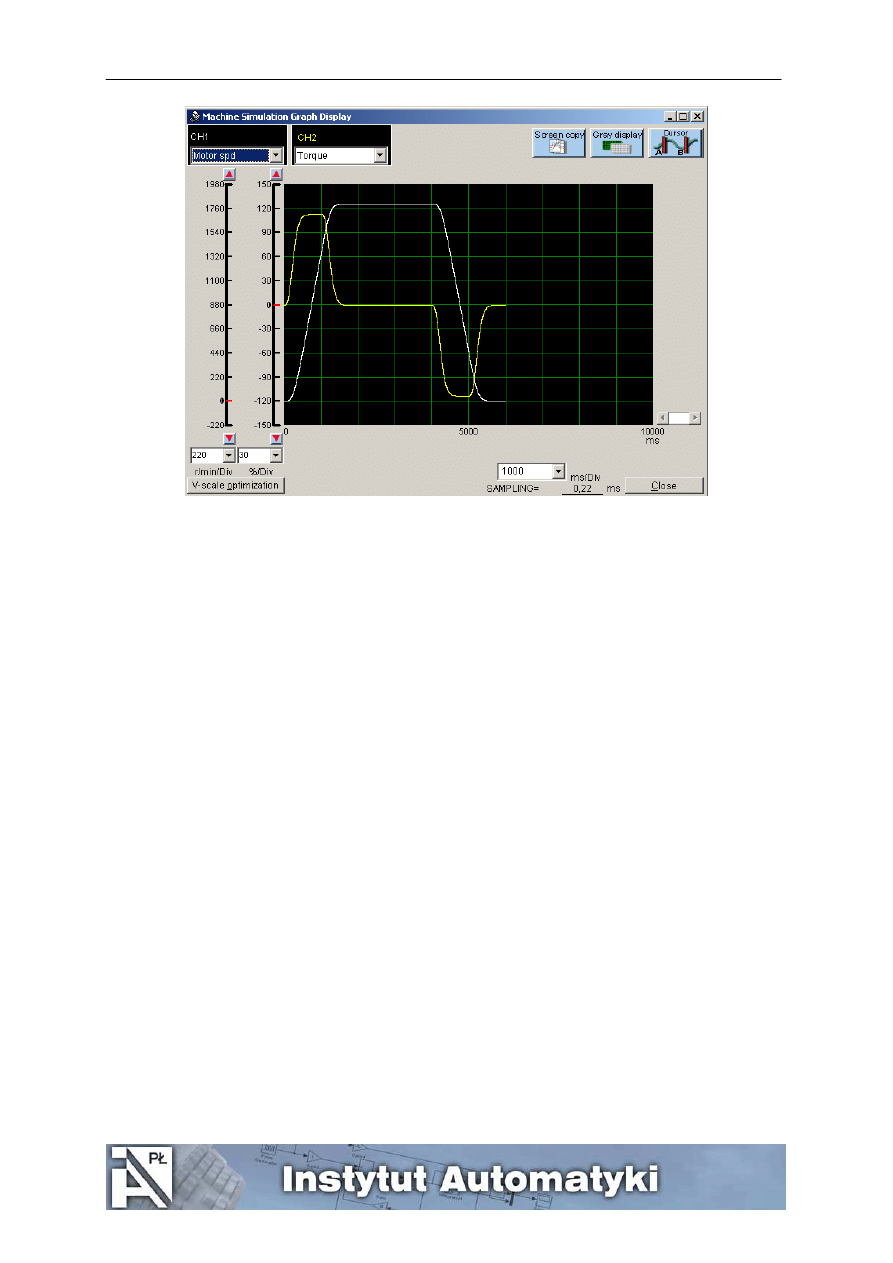
Uruchom symulację. Po wykonanej symulacji zostanie wywołane okno graficzne w którym można obserwować
jej wynik.
1
2
2
Instrukcja do ćwiczenia nr 6 z Laboratorium Automatyki
9
W kolejnym etapie wczytaj do symulatora parametry regulatora z falownika i powtórz symulację.
Porównaj wyniki, sformułuj wnioski.
Uwaga !
W razie zaobserwowania niepokojących objawów w pracy napędu (piski, nadmierny hałas, komunikat
alarmu) wyłącz niezwłocznie zasilanie falownika (prawa listwa) i powiadom prowadzącego.
Wyszukiwarka
Podobne podstrony:
AiR ais cw 6 MRJ3A id 53377 Nieznany (2)
cw med 5 id 122239 Nieznany
cw excel3 id 166408 Nieznany
cw 6 podobienstwo id 122439 Nieznany
cw 13 id 121763 Nieznany
Cw mikrob 2 id 122249 Nieznany
CW K2 id 217375 Nieznany
cw mocz id 100534 Nieznany
cw med 2 id 122233 Nieznany
cw 11 id 122151 Nieznany
Instrukcja cw 3 PI id 216486 Nieznany
cw 1 ZL id 100327 Nieznany
CW 08 id 122562 Nieznany
cw 12 id 122179 Nieznany
cw excel2 id 122222 Nieznany
Fundamentowanie cw cz 2 id 181 Nieznany
MD cw 08 id 290129 Nieznany
MD cw 02 id 290123 Nieznany
cw 5 stokes id 121301 Nieznany
więcej podobnych podstron