
WPROWADZENIE
DO SZTUCZNEJ INTELIGENCJI
POLITECHNIKA WARSZAWSKA
WYDZIAŁ MECHANICZNY ENERGETYKI I LOTNICTWA
MEL
MEL
NS 586
Dr in
ż
. Franciszek Dul
© F.A. Dul 2007

21. UCZENIE ZE WZMOCNIENIEM
© F.A. Dul 2007
Uczenie ze wzmocnieniem
W tym rozdziale zobaczymy w jaki
sposób – przy braku nauczyciela –
agent mo
ż
e uczy
ć
si
ę
na podstawie
kar i nagród otrzymywanych za swoje
© F.A. Dul 2007
kar i nagród otrzymywanych za swoje
działania prowadzone w nieznanym
ś
rodowisku.
Jak uczy
ć
si
ę
przy braku wzorców?
Ka
ż
dy rodzaj uczenia wymaga sprz
ęż
enia zwrotnego
informuj
ą
cego agenta o skuteczno
ś
ci nauki.
Uczenie indukcyjne i probabilistyczne wykorzystuje zbiory
wzorców ucz
ą
cych do dostrajania parametrów modeli.
Uczenie ze wzmocnieniem
(uczenie z krytykiem;
reinforcement learning) wykorzystuje
kary
i
nagrody
informuj
ą
ce agenta o poprawno
ś
ci jego działa
ń
.
Celem uczenia ze wzmocnieniem jest wykorzystanie
©
F.A. Dul 2007
Celem uczenia ze wzmocnieniem jest wykorzystanie
obserwowanych nagród i kar do znalezienia optymalnej
strategii działania w danym (nieznanym)
ś
rodowisku.
Uczenie ze wzmocnieniem jest niezast
ą
pione w grach
(np. w szachach), gdzie liczba mo
ż
liwych wzorców jest
tak du
ż
a,
ż
e wyklucza to uczenie indukcyjne.
Uczenie ze wzmocnieniem stanowi jedyn
ą
mo
ż
liwo
ść
uczenia w przypadku gdy
ś
rodowisko jest całkowicie
nieznane - w zadaniach eksploracji.

20.1. Wprowadzenie
• Uczenie pasywne ze wzmocnieniem
• Uczenie aktywne ze wzmocnieniem
• Poszukiwania strategii
•
Zastosowanie – autonomiczne sterowanie
ś
migłowcem
Plan rozdziału
© F.A. Dul 2007
21.2. Uczenie pasywne ze wzmocnieniem
Uczenie pasywne ze wzmocnieniem
polega na nauczeniu
si
ę
u
ż
yteczno
ś
ci stanów
U
π
(s)
przy danej strategii działania
π
(s)
(w stanie
s
agent wykonuje działanie
π
(s)
).
Zakłada si
ę
,
ż
e
ś
rodowisko jest obserwowalne.
W uczeniu pasywnym agent nie zna modelu przej
ś
cia
T(s,a,s’)
i funkcji nagrody
R(s).
Agent wykonuje w
ś
rodowisku zbiór
prób
u
ż
ywaj
ą
c strategii
π
.
Celem tych prób jest nauczenie si
ę
funkcji u
ż
yteczno
ś
ci
U
π
(s)
dla ka
ż
dego stanu
s,
© F.A. Dul 2007
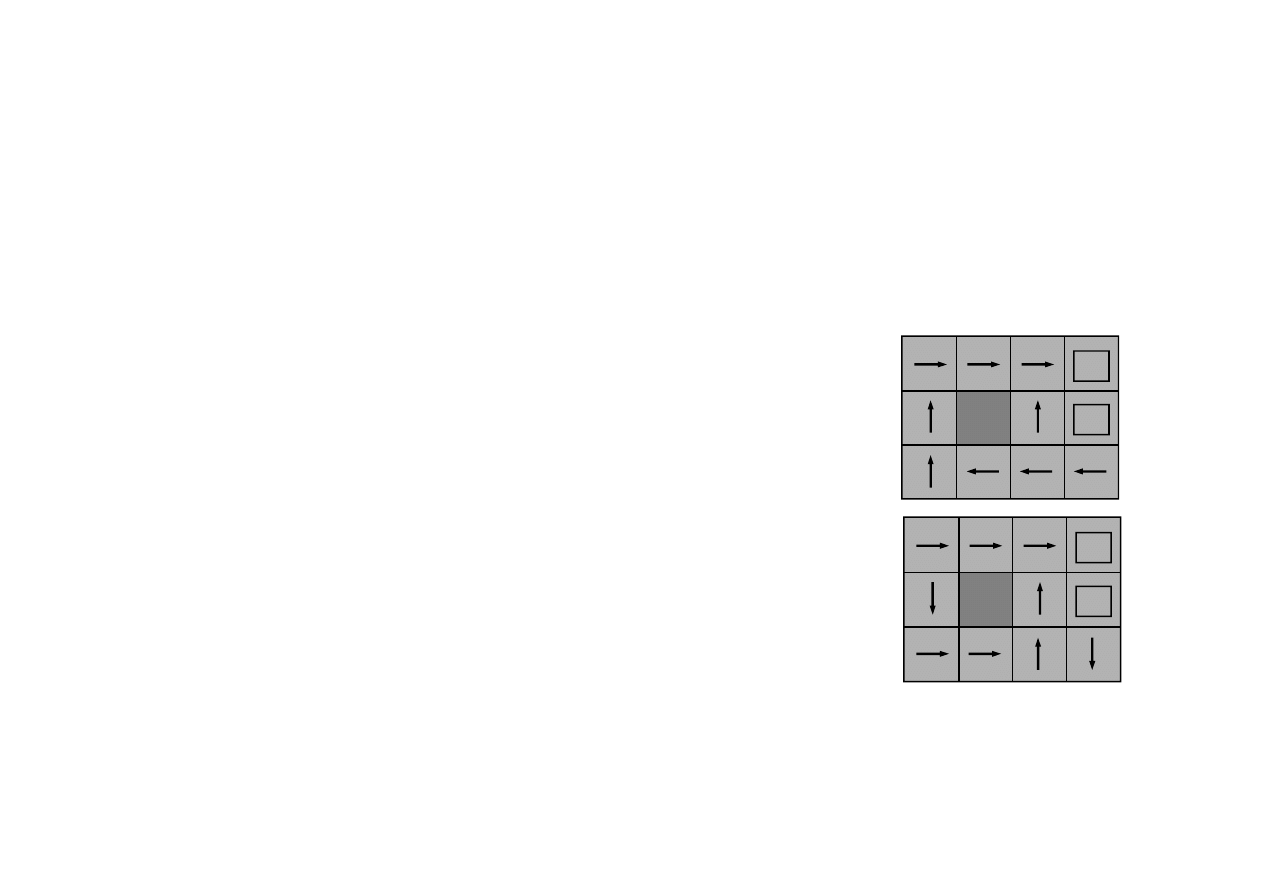
+1
-1
+1
-1
0.705
0.762
0.812 0.868 0.918
0.660
0.611 0.388
0.655
P
RZYKŁAD
Strategia
π
i u
ż
yteczno
ś
ci stanów w
ś
wiecie 4x3.
dla ka
ż
dego stanu
s,
=
=
∑
∞
=
s
s
s
R
E
s
U
t
t
t
0
0
,
|
)
(
)
(
π
γ
π
21.2. Uczenie pasywne ze wzmocnieniem
W adaptacyjnym programowaniu dynamicznym (ADP) agent
uczy si
ę
funkcji przej
ś
cia
T(s,a,s’)
.
Adaptacyjne programowanie dynamiczne
Uczenie metod
ą
adaptacyjnego programowania dynamicznego
Uczenie si
ę
funkcji przej
ś
cia
T(s,a,s’)
i obserwacje funkcji
nagrody
R(s)
pozwalaj
ą
wykorzysta
ć
równanie Bellmana
∑
+
=
'
)
'
(
)
'
),
(
,
(
)
(
)
(
s
s
U
s
s
s
T
s
R
s
U
π
π
π
γ
Umo
ż
liwia to uwzglednienie zale
ż
no
ś
ci mi
ę
dzy u
ż
yteczno
ś
cia-
mi stanów i w efekcie lepsze przybli
ż
enie funkcji u
ż
yteczno
ś
ci.
© F.A. Dul 2007
Uczenie metod
ą
adaptacyjnego programowania dynamicznego
jest łatwe, gdy
ż
odpowiadaj
ą
ce mu równanie Bellmana jest
liniowe (przy stałej strategii nie ma maksymalizacji).
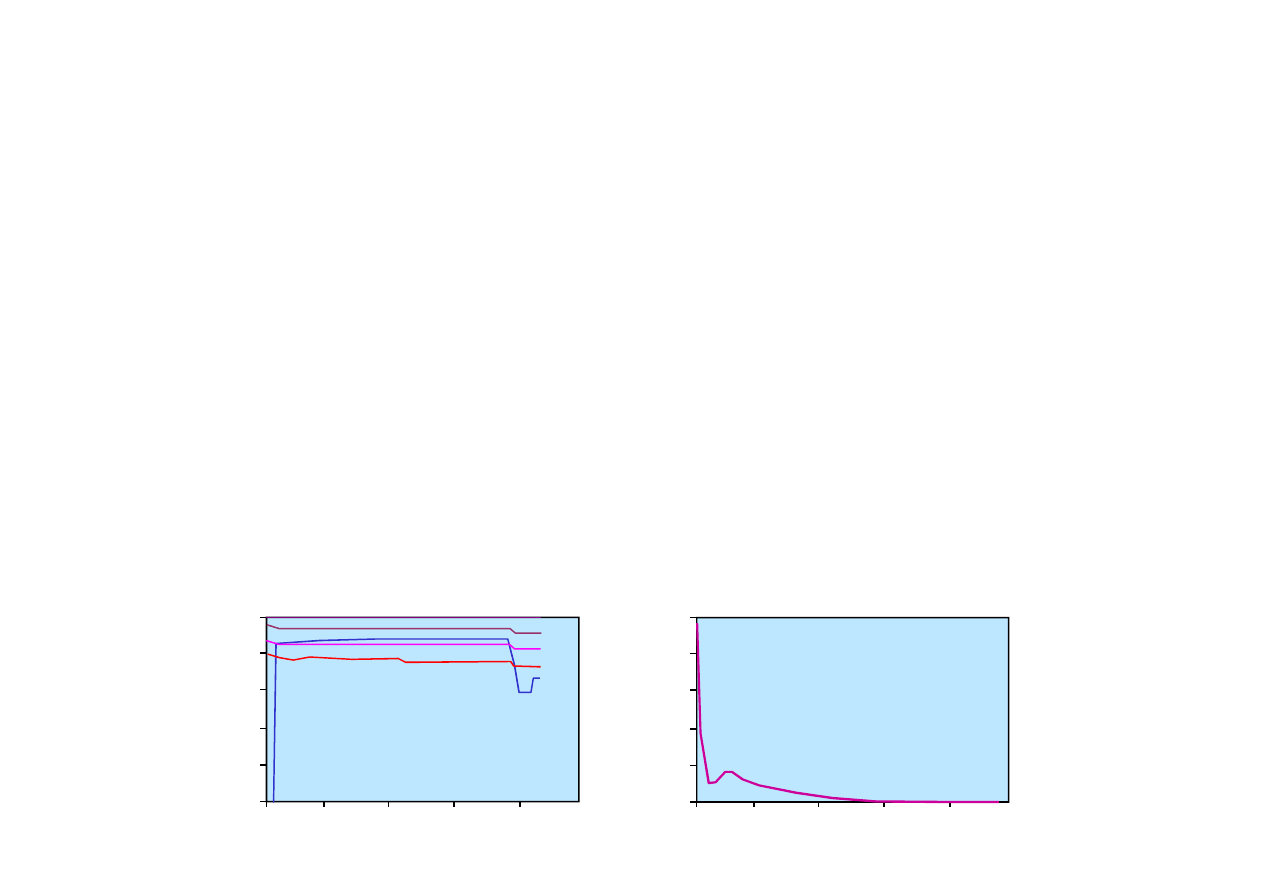
Liczba prób
0.2
0.4
0.6
0.8
1.0
0
20
40
60
80
100
B
ł
ą
d
Wyniki uczenia ADP dla zadania 4x3.
U
ż
y
te
c
z
n
o
ś
c
i
U
π
(s
)
0.2
0.4
0.6
0.8
1.0
0
20
40
60
80
100
Liczba prób
(4,3)
(3,3)
(1,3)
(1,1)
(3,2)

21.3. Uczenie aktywne ze wzmocnieniem
W uczeniu pasywnym strategia działa
ń
agenta jest ustalona.
W
uczeniu aktywnym
agent musi
nauczy
ć
si
ę
kompletnego
modelu
ś
rodowiska ł
ą
cznie z prawdopodobie
ń
stwami efektów
wszystkich działa
ń
.
Wybór działa
ń
optymalnych oraz wyznaczenie funkcji
u
ż
yteczno
ś
ci
U
mog
ą
by
ć
dokonane poprzez rozwi
ą
zanie
Mo
ż
na tego dokona
ć
metodami adaptacyjnego programowania
dynamicznego.
© F.A. Dul 2007
W przypadku iteracji strategii działania optymalne s
ą
otrzymy-
wane bezpo
ś
rednio z równania Bellmana.
u
ż
yteczno
ś
ci
U
mog
ą
by
ć
dokonane poprzez rozwi
ą
zanie
nieliniowego równania Bellmana
∑
+
=
'
)
'
(
)
'
,
,
(
max
)
(
)
(
s
a
s
U
s
a
s
T
s
R
s
U
γ
21.3. Aktywne uczenie ze wzmocnieniem
Eksploracja polega na poznawaniu nieznanego
ś
rodowiska.
Eksploracja
Agent nie posiada modelu
ś
rodowiska; musi si
ę
go nauczy
ć
na podstawie działa
ń
i obserwacji.
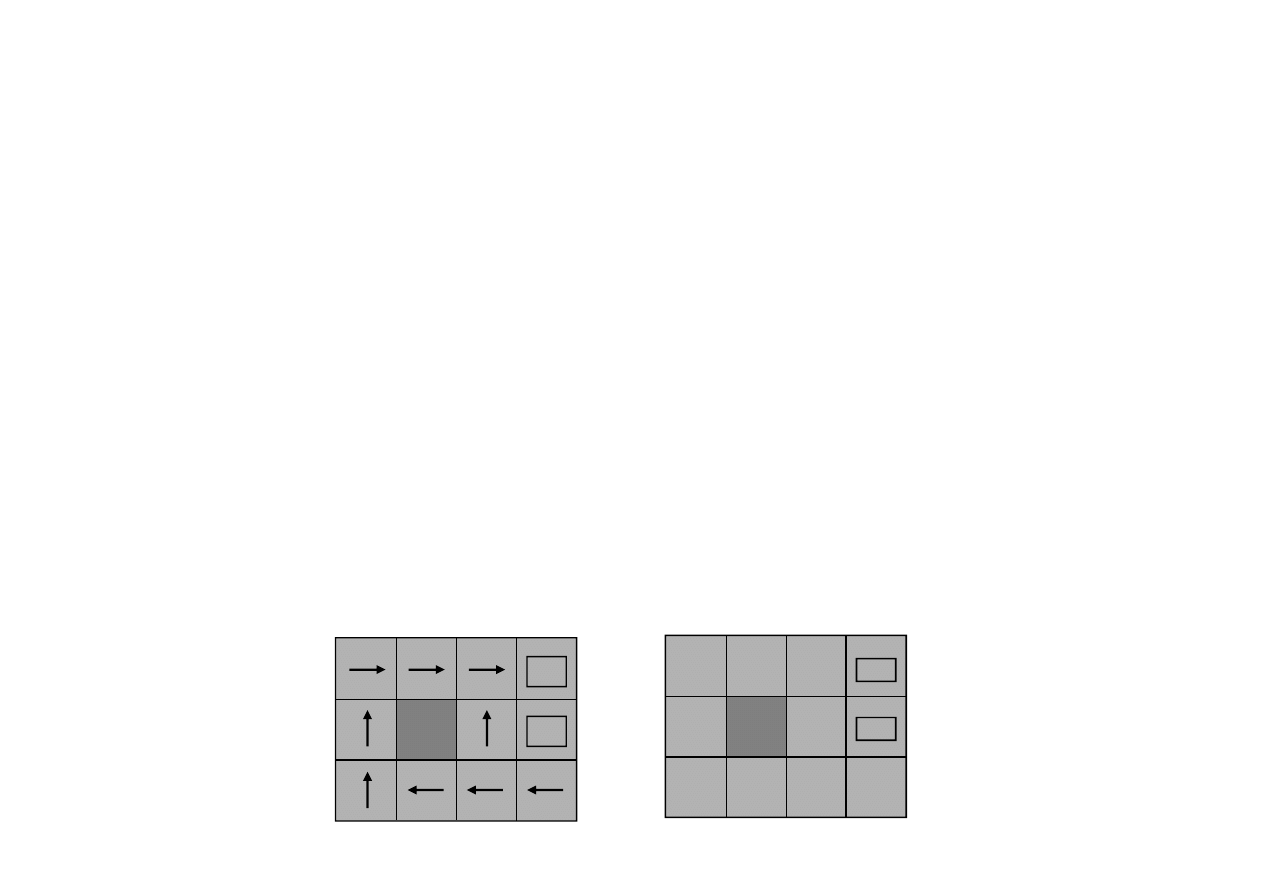
P
RZYKŁAD
Zadanie 4x3. Sekwencja działa
ń
optymalnych (dla modelu
ś
cisłego)...
Strategia wyznaczona na podstawie modelu wyuczonego
mo
ż
e jednak nie by
ć
optymalna.
+1
-1
...oraz wyznaczona na podstawie strategii
© F.A. Dul 2007
+1
-1
Agent nie nauczył si
ę
prawdziwej strategii
optymalnej; nie nauczył si
ę
te
ż
prawdziwych
warto
ś
ci u
ż
yteczno
ś
ci stanów.
...oraz wyznaczona na podstawie strategii
optymalnej dla modelu wyuczonego.
Wyznaczona strategia jest
suboptymalna
.
Agent wyznaczaj
ą
cy strategie suboptymalne nazywany jest
agentem zachłannym
(greedy agent).
Agent zachłanny bardzo rzadko uczy si
ę
strategii optymalnej.

21.3. Aktywne uczenie ze wzmocnieniem
Przyczyn
ą
wyznaczenia strategii suboptymalnych jest
bezkrytyczne uwzgl
ę
dnianie nagród, bez zwracania uwagi
na popraw
ę
jako
ś
ci modelu
ś
rodowiska.
Agent powinien zatem d
ąż
y
ć
do kompromisu pomi
ę
dzy
eksploatacj
ą
ś
rodowiska w celu maksymalizacji nagrody
a
eksploracj
ą
ś
rodowiska w celu poprawienia jako
ś
ci modelu.
Metoda
GLIE
(Greedy in the Limit of Infinite Exploration)
polega na próbowaniu wszystkich działa
ń
we wszystkich
stanach w celu unikni
ę
cia przeoczenia strategii optymalnej.
© F.A. Dul 2007
stanach w celu unikni
ę
cia przeoczenia strategii optymalnej.
Metoda GLIE pozwala agentowi nauczy
ć
si
ę
modelu
prawdziwego, ale odbywa si
ę
to du
ż
ym kosztem.

21.3. Aktywne uczenie ze wzmocnieniem
Uczenie funkcji działania
Agent aktywny który nie korzysta z ustalonej strategii mo
ż
e
u
ż
y
ć
metody czasowo-ró
ż
nicowej (TD),
Alternatywn
ą
wersj
ą
metody czasowo-ró
ż
nicowej jest
Q-uczenie
, które zamiast u
ż
yteczno
ś
ci u
ż
ywa reprezentacji
w postaci warto
ś
ci działania, tzw.
Q-warto
ś
ci
.
Q(a,s)
oznacza warto
ść
wykonania działania
a
dla stanu
s
.
Q-warto
ś
ci zwi
ą
zane s
ą
z u
ż
yteczno
ś
ci
ą
nast
ę
puj
ą
co
)
)
(
)
'
(
)
(
(
)
(
)
(
s
U
s
U
s
R
s
U
s
U
π
π
π
π
γ
α
−
+
+
←
© F.A. Dul 2007
Q-warto
ś
ci zwi
ą
zane s
ą
z u
ż
yteczno
ś
ci
ą
nast
ę
puj
ą
co
)
,
(
max
)
(
s
a
Q
s
U
a
=
Agent czasowo-ró
ż
nicowy ucz
ą
cy si
ę
Q-funkcji nie potrzebuje
modelu
ś
rodowiska ani do uczenia, ani do wyboru działania.
Q-uczenie wymaga znajomo
ś
ci modelu
ś
rodowiska.
∑
+
=
'
'
)
'
,
'
(
max
)
'
,
,
(
)
(
)
,
(
s
a
s
a
Q
s
a
s
T
s
R
s
a
Q
γ
Równanie dla Q-warto
ś
ci ma posta
ć

21.3. Aktywne uczenie ze wzmocnieniem
Równanie metody czasowo-ró
ż
nicowej dla Q-uczenia ma
posta
ć
,
)
)
,
(
)
'
,
'
(
max
)
(
(
)
,
(
)
,
(
'
s
a
Q
s
a
Q
s
R
s
a
Q
s
a
Q
a
−
+
+
=
γ
α
Efektywno
ść
metody TD dla Q-uczenia nie jest zadowalaj
ą
ca.
Metody adaptacyjnego programowania dynamicznego (ADP)
u
ż
ywaj
ą
ce (lub ucz
ą
ce si
ę
) modelu
ś
rodowiska s
ą
zazwyczaj
znacznie wydajniejsze.
Co jest zatem lepsze dla agenta:
© F.A. Dul 2007
Co jest zatem lepsze dla agenta:
Badania AI pokazały,
ż
e podej
ś
cie oparte na wiedzy jest
zazwyczaj lepsze.
Efektywny agent AI powinien zatem posiada
ć
modele
przynajmniej niektórych własno
ś
ci
ś
rodowiska.
uczenie si
ę
modelu i funkcji u
ż
yteczno
ś
ci czy te
ż
uczenie si
ę
funkcji działania bez modelu?
Im bardziej zło
ż
one jest
ś
rodowisko, tym wyra
ź
niej widoczne
s
ą
zalety podej
ś
cia opartego na wiedzy.

21.4. Uogólnienia w uczeniu ze wzmocnieniem
Pierwszym zastosowaniem uczenia ze wzmocnieniem było
opracowanie
programu do gry w warcaby
(1959).
Zastosowania uczenia ze wzmocnieniem - gry
Program wykorzystywał aproksymacj
ę
liniow
ą
z szesnastoma
parametrami; nie wykorzystywał w trakcie uczenia nagród!
Program grał na poziomie dobrych graczy w warcaby.
System TD-Gammon opracowany do
gry w trik-traka
(1992)
ukazuje mo
ż
liwo
ś
ci uczenia ze wzmocnieniem.
Funkcja szacuj
ą
ca była reprezentowana sieci
ą
neuronow
ą
© F.A. Dul 2007
Funkcja szacuj
ą
ca była reprezentowana sieci
ą
neuronow
ą
z jedn
ą
warstw
ą
ukryt
ą
zło
ż
on
ą
z czterdziestu w
ę
złów.
Nagrod
ą
był tylko ko
ń
cowy wynik gry.
Uczenie wykorzystywało metod
ę
TD w wersji parametrycznej.
Uczenie przeprowadzono za pomoc
ą
200,000 prób (obliczenia
trwały dwa tygodnie).
Pó
ź
niejsza wersja programu zawierała 80 w
ę
złów w warstwie
ukrytej i była uczona za pomoc
ą
300,000 prób.
Poziom gry programu TD-Gammon odpowiadał najlepszym
graczom w trik-traka na
ś
wiecie.
21.2. Sformułowanie statystyczne uczenia
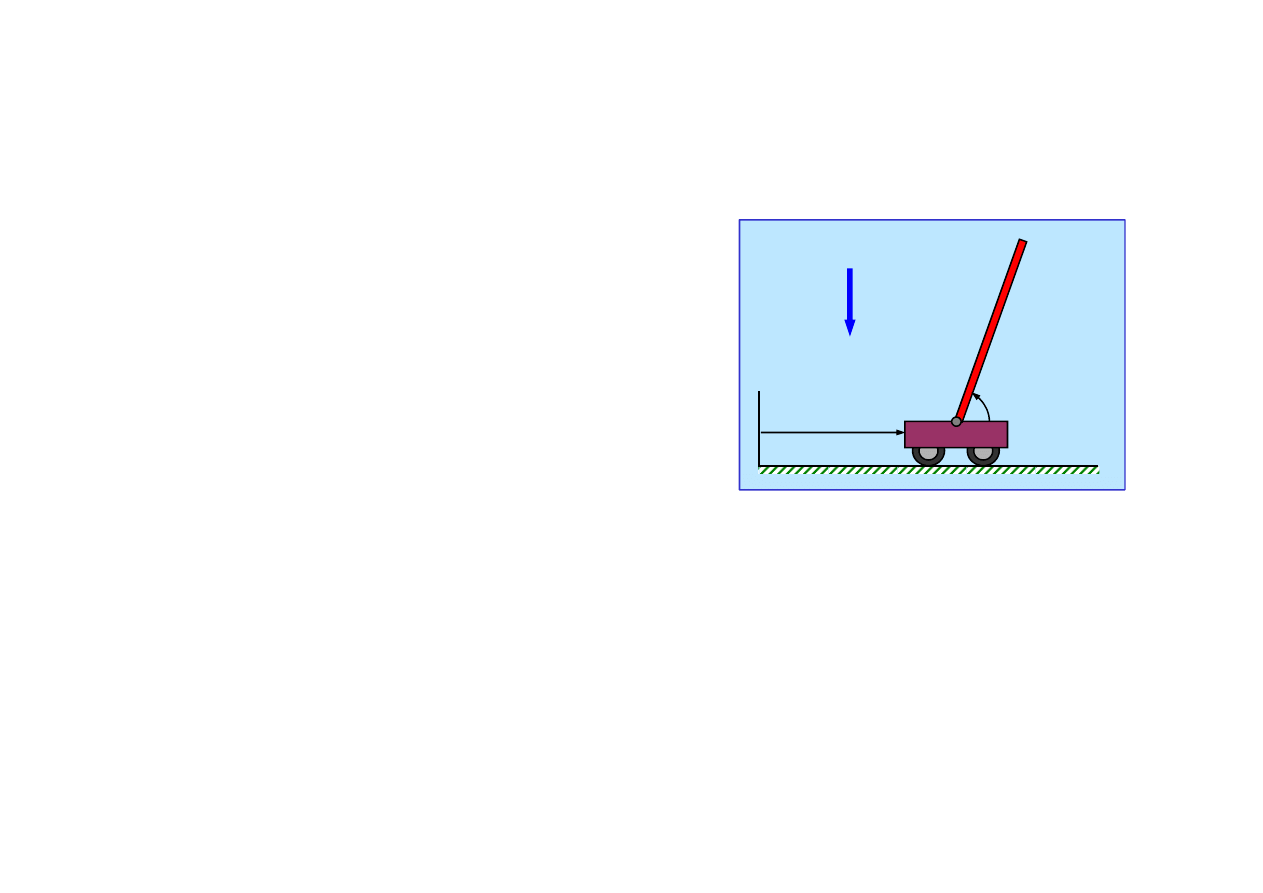
Zastosowania uczenia ze wzmocnieniem - robotyka
Przykładem zastosowania uczenia ze wzmocnieniem
w robotyce jest zadanie sterowania wahadłem odwróconym.
Nale
ż
y tak sterowa
ć
poło
ż
eniem
x
wózka aby utrzyma
ć
wahadło
w poło
ż
eniu pionowym,
θ
~
π
/2
.
g
θ
x
Poło
ż
enie wózka jest ograniczone,
x
∈
[0,L].
Zmienne stanu s
ą
ci
ą
głe.
© F.A. Dul 2007
Zadaniu temu po
ś
wi
ę
cono tysi
ą
ce prac z zakresu teorii
sterowania oraz AI.
Zmienne stanu s
ą
ci
ą
głe.
Sterowanie jest typu bang-bang.
Algorytm B
OXES
(1968) pozwalał wyznaczy
ć
sterowanie
za pomoc
ą
uczenia ze wzmocnieniem ju
ż
po 30 próbach.
Umo
ż
liwiało to sterowanie realnym urz
ą
dzeniem całymi
godzinami.
Obecnie algorytmy oparte na uczeniu ze wzmocnieniem
pozwalaj
ą
wyznacza
ć
sterowanie wahadłem potrójnym.

21.5 Poszukiwania strategii
Uczenie ze wzmocnieniem mo
ż
e by
ć
zastosowane
do poszukiwania strategii działania agenta.
Strategia jako funkcja odwzorowuj
ą
ca stany na działania
mo
ż
e by
ć
reprezentowana w postaci parametrycznej,
np. jako Q-funkcja liniowa wzgl
ę
dem parametrów,
Poszukiwanie strategii jest w ten sposób sprowadzone
do dostrojenia parametrów.
)
,
(
ˆ
max
)
(
s
a
Q
s
a
θ
π
=
© F.A. Dul 2007
do dostrojenia parametrów.
Algorytm P
EGASUS
(2000) wykorzystuje ci
ą
g N liczb losowych
do generowania strategii.
Algorytm P
EGASUS
był u
ż
ywany do wyznaczania efektywnych
strategii w wielu zagadnieniach, np. do
autonomicznego
sterowania
ś
migłowcem
.

Na podstawie artykułów:
„Autonomous helicopter flight via Reinforcement Learning”,
„P
EGASUS:
A policy search method for large MDPs and POMDPs”,
Andrew Y. Ng, Stanford University,
H. Jin Kim, Michael I. Jordan, and Shankar Sastry University of California, Berkeley
(2000). (
www.cs.berkeley.edu
)
Autonomiczne sterowanie
ś
migłowcem jest zadaniem trudnym,
gdy
ż
dynamika ruchu
ś
migłowca jest wyj
ą
tkowo zło
ż
ona.
21.6 Autonomiczne sterowanie
ś
migłowcem -
przykład zastosowania uczenia ze wzmocnieniem
© F.A. Dul 2007
gdy
ż
dynamika ruchu
ś
migłowca jest wyj
ą
tkowo zło
ż
ona.
Ze wzgl
ę
du na niesymetrie zjawisk dynamicznych i aerodyna-
micznych oraz sprz
ęż
enia pomi
ę
dzy poszczególnymi stopniami
swobody ruchu nawet proste manewry wymagaj
ą
precyzyjnego
sterowania.
Metody sztucznej inteligencji pozwoliły opracowa
ć
sterownik
autonomicznie pilotuj
ą
cy
ś
migłowiec w trakcie wykonywania
ró
ż
nych, nawet do
ść
trudnych, manewrów.
Sterownik został opracowany przy u
ż
yciu
algorytmu uczenia
ze wzmocnieniem P
EGASUS
oraz
filtracji Kalmana
.

21.6. Autonomiczne sterowanie
ś
migłowcem
Proces decyzyjny Markowa (MDP) jest opisany poprzez:
Uczenie ze wzmocnieniem: algorytm P
EGASUS
• zbiór stanów
S
,
• stan pocz
ą
tkowy
s
0
∈
S
,
• przestrze
ń
działa
ń
A
,
• prawdopodobie
ń
stwa przej
ś
cia stanów
(s,a)
→
s’ : P
sa
(·)
,
• funkcja nagrody
R(s): S a R
,
• współczynnik dyskonta
γ
< 1
,
• rodzina
Π
Π
Π
Π
strategii
π
: S a A
.
© F.A. Dul 2007
gdzie
s
0
, s
1
, s
2
,... jest trajektori
ą
, czyli ci
ą
giem stanów
odwiedzonych podczas realizacji strategii
π
.
]
|
)
(
)
(
)
(
[
)
(
2
2
1
0
π
γ
γ
π
K
+
+
+
=
s
R
s
R
s
R
E
U
Celem uczenia jest wyznaczenie strategii
π
* o najwi
ę
kszej
u
ż
yteczno
ś
ci,
Uczenie ze wzmocnieniem oparte jest na stochastycznej
funkcji u
ż
yteczno
ś
ci dla strategii
π
• rodzina
Π
Π
Π
Π
strategii
π
: S a A
.
*).
(
)
(
:
π
π
π
U
U
<
Π
∈
∀

21.6. Autonomiczne sterowanie
ś
migłowcem
U
ż
yteczno
ś
ci
U(
π
)
nie mog
ą
by
ć
obliczone bezpo
ś
rednio, ale
mo
ż
na wyznaczy
ć
ich przybli
ż
enia
Ū
(
π
)
metod
ą
Monte Carlo
.
Potrzebny jest do tego
stochastyczny model dynamiki obiektu.
Model taki wykorzystuje rozkład prawdopodobie
ń
stwa stanu
nast
ę
pnego
s’
,
P
sa
(s’),
przy danych: stanie
s
i sterowaniu
a
.
.
)
'
(
:
'
p
s
P
s
p
sa
=
→
Dla danej warto
ś
ci losowej
p
model generuje stan nast
ę
pny
s’
dla którego
P
sa
(s’) = p,
© F.A. Dul 2007
*
1
)
'
(
*,
)
'
(
2
1
p
s
P
p
s
P
sa
sa
−
=
=
Przykład Je
ż
eli dla pary stan-działanie
(s,a)
model mo
ż
e
generowa
ć
dwa stany
s
1
’
i
s
2
’
z prawdopodobie
ń
stwami:
to stan nast
ę
pny
s’
zale
ż
y od warto
ś
ci zmiennej
p
nast
ę
puj
ą
co:
s’= s
1
’
je
ż
eli
p
≤
p* ,
s’= s
2
’
je
ż
eli
p > p* .
Dla danej losowej warto
ś
ci
p
stan nast
ę
pny
s’
wyznaczany jest
deterministycznie
.

21.6. Autonomiczne sterowanie
ś
migłowcem
Model sparametryzowany losowo pozwala uwzgl
ę
dni
ć
zaburzenia stanu lub sterowania spowodowane czynnikami
losowymi (turbulencj
ą
, nierównomierno
ś
ci
ą
pracy silnika, itp.)
).
,
,
(
'
p
a
s
g
s
=
Model stochastyczny mo
ż
na przedstawi
ć
w postaci modelu
deterministycznego
g
sparametryzowanego zmienn
ą
losow
ą
p.
Model dynamiki
g
mo
ż
e by
ć
konstruowany w oparciu o prawa
podstawowe (model przyczynowy) lub te
ż
poprzez
© F.A. Dul 2007
W algorytmie P
EGASUS
sekwencje stanów obliczane s
ą
przy
u
ż
yciu modelu
g
deterministycznie
na podstawie sekwencji
liczb losowych
p
.
Ci
ą
gi liczb losowych na podstawie których oblicza si
ę
sekwencje stanów mog
ą
by
ć
generowane dla ka
ż
dej strategii
π
w sposób
powtarzalny
.
podstawowe (model przyczynowy) lub te
ż
poprzez
identyfikacj
ę
na podstawie pomiarów obiektu rzeczywistego.
21.6. Autonomiczne sterowanie
ś
migłowcem
Wyznaczenie przybli
ż
onych u
ż
yteczno
ś
ci
Ū
(
π
)
metod
ą
Monte
Carlo przebiega nast
ę
puj
ą
co:
• zakłada si
ę
liczb
ę
kroków czasowych
H
;
• generuje si
ę
ci
ą
g liczb losowych
p
1
, p
2
,..., p
H
;
• dla ka
ż
dej strategii
π ∈ Π
Π
Π
Π
:
– generuje si
ę
losowo
m
stanów pocz
ą
tkowych
s
0
(i)
∈
S
,
czyli tzw. scenariuszy;
– przy u
ż
yciu modelu
g
dla ka
ż
dego stanu pocz
ą
tkowego
s
0
(i)
generuje si
ę
trajektori
ę
s
1
(i)
,
s
2
(i)
, ... ,
s
H
(i)
,
© F.A. Dul 2007
– wyznacza si
ę
przybli
ż
on
ą
u
ż
yteczno
ść
.
1
,...,
0
,
)
),
(
,
(
1
)
(
)
(
)
(
1
−
=
=
+
+
H
k
p
s
s
g
s
k
i
k
i
k
i
k
π
∑
=
+
+
+
+
=
m
i
i
H
H
i
i
i
s
R
s
R
s
R
s
R
m
U
1
)
(
)
(
2
2
)
(
1
)
(
0
)
(
)
(
)
(
)
(
1
)
(
γ
γ
γ
π
K
U
ż
ycie tego samego ci
ą
gu liczb losowych
p
1
, p
2
,..., p
H
dla
wszystkich strategii
π∈Π
Π
Π
Π
i wszystkich scenariuszy zapewnia
porównywalno
ść
i powtarzalno
ść
obliczonych u
ż
yteczno
ś
ci
Ū
(
π
)
.
21.6. Autonomiczne sterowanie
ś
migłowcem
Przy zało
ż
eniu,
ż
e liczba scenariuszy
m
spełnia warunek
Obliczenie zbioru u
ż
yteczno
ś
ci
Ū
(
π
)
dla zbioru sekwencji
stanów pozwala wyznaczy
ć
najlepsz
ą
strategi
ę
π
* jako
0
,
)),
/
1
log(
,
/
1
(
~
>
δ
ε
δ
ε
m
m
.
|
)
(
)
(
|
:
ε
π
π
π
<
−
Π
∈
∀
U
U
przybli
ż
enie funkcji u
ż
yteczno
ś
ci aproksymuje z prawdopodo-
bie
ń
stwem 1-
δ
warto
ść
dokładn
ą
© F.A. Dul 2007
stanów pozwala wyznaczy
ć
najlepsz
ą
strategi
ę
π
* jako
)
(
max
arg
*
π
π
π
U
Π
∈
=
Poniewa
ż
funkcja u
ż
yteczno
ś
ci jest deterministyczna,
to wyznaczenie najlepszej strategii
π
*
mo
ż
e by
ć
przeprowadzone dowoln
ą
metod
ą
poszukiwa
ń
:
metod
ą
najwi
ę
kszego spadku lub metodami gradientowymi.

21.6. Autonomiczne sterowanie
ś
migłowcem
Wyposa
ż
enie
ś
migłowca:
• komputer nawigacyjny,
Do bada
ń
u
ż
yto zdalnie sterowanego modelu
ś
migłowca
Yamaha R-50
• masa 20 kg,
• długo
ść
3.6 m,
•
ś
rednica wirnika 2.8 m,
• warto
ść
70,000 $.
Dane
ś
migłowca:
Ś
migłowiec i jego model
© F.A. Dul 2007
Komputer nawigacyjny wyznaczał estymacj
ę
wektora stanu
na podstawie sygnałów z GPS, INS oraz kompasu cyfrowego
za pomoc
ą
filtru Kalmana
.
• komputer nawigacyjny,
• inercyjny system nawigacji (INS) z trzema akcelerometrami
oraz trzema
ż
yroskopami,
• ró
ż
nicowy system GPS zapewniaj
ą
cy z wyznaczenie poło
ż
enia
z rozdzielczo
ś
ci
ą
2 cm,
• kompas cyfrowy.
Sygnały wej
ś
ciowe z GPS, INS oraz sygnały steruj
ą
ce
były próbkowane z cz
ę
stotliwo
ś
ci
ą
50Hz.
21.6. Autonomiczne sterowanie
ś
migłowcem
Stan
ś
migłowca opisuje dwana
ś
cie zmiennych:
}
,
,
,
,
,
,
,
,
,
,
,
{
ψ
θ
φ
ψ
θ
φ
&
&
&
&
&
&
z
y
x
z
y
x
s
=
Sterowanie
ś
migłowcem opisuj
ą
cztery zmienne:
• x, y, z
- poło
ż
enie,
•
φ
,
θ
,
ψ
- orientacja (k
ą
ty Eulera),
ψ
θ
φ
&
&
&
,
,
•
- pr
ę
dko
ś
ci k
ą
towe.
z
y
x
&
&
&
,
,
•
- pr
ę
dko
ś
ci liniowe,
}
,
,
,
{
a
a
a
a
a
=
© F.A. Dul 2007
• a
1
- pochylenie wirnika,
• a
2
- przechylenie wirnika,
• a
3
- skok wirnika,
• a
4
- skok
ś
migła ogonowego.
}
,
,
,
{
4
3
2
1
a
a
a
a
a
=
Model dynamiki ma posta
ć
niejawn
ą
(„czarna skrzynka”)
...
,
1
,
0
,
12
...,
,
1
,
)
)
(
),
(
(
)
(
)
1
(
=
=
=
−
+
t
k
t
a
t
s
f
t
s
t
s
k
k
k

21.6. Autonomiczne sterowanie
ś
migłowcem
Identyfikacja modelu
Wej
ś
cie
x
modelu tworz
ą
: stan
s
b
zdefiniowany w układzie
zwi
ą
zanym ze
ś
migłowcem,
.
8
,
,
1
,
)
,
0
(
2
K
=
+
=
k
x
y
T
k
k
σ
η
β
Przy opracowaniu sterownika nie u
ż
ywano klasycznego
modelu dynamiki w postaci równa
ń
p
ę
du i kr
ę
tu, lecz
model
typu wej
ś
cie-wyj
ś
cie
z szumem gaussowskim o wariancji
σ
2
,
}
,
,
,
,
,
,
,
{
ψ
θ
φ
θ
φ
&
&
&
&
&
&
b
b
b
b
z
y
x
s
=
© F.A. Dul 2007
.
)
(
)
1
(
t
s
t
s
y
b
k
b
k
k
−
+
=
.
]
,
[
T
b
a
s
x
=
,
}
,
,
,
,
,
,
,
{
ψ
θ
φ
θ
φ
&
&
&
&
&
&
b
b
b
b
z
y
x
s
=
oraz sterowanie
a
w chwili
t
,
Wyj
ś
cia
y
k
tworz
ą
przyrosty zmiennych stanu dla
k=1,...,8,
Wektor współczynników
β
k
jest wyznaczany osobno dla ka
ż
dej
zmiennej stanu na podstawie
m
pomiarów wej
ść
i wyj
ść
modelu
w chwilach
t = 1,...,m.

21.6. Autonomiczne sterowanie
ś
migłowcem
.
y
X
)
X
X
(
1
k
T
T
k
W
W
−
=
β
Współczynniki regresji dla k-tej zmiennej stanu
s
k
s
ą
równe
Do identyfikacji modelu u
ż
yto metody lokalnej regresji liniowej,
któr
ą
zastosowano do ka
ż
dej zmiennej stanu
s
k
, k=1,...,8.
,
X
12
,
2
2
,
2
1
,
2
12
,
1
2
,
1
1
,
1
2
1
=
=
x
x
x
x
x
x
x
x
L
L
.
y
,
2
,
1
=
k
k
y
y
Pomiary wej
ść
i wyj
ść
modelu dynamiki dla
t = 1,...,m
mo
ż
na
zapisa
ć
w postaci macierzowej nast
ę
puj
ą
co
© F.A. Dul 2007
.
)
)
)
(
)
(
exp(
(
1
2
1
i
T
i
x
x
x
x
diag
W
−
Σ
−
−
=
−
Do identyfikacji modelu wykorzystano sze
ś
ciominutowe
rejestracje sterowania i stanu
ś
migłowca sterowanego zdalnie
przez do
ś
wiadczonego pilota.
,
X
12
,
2
,
1
,
12
,
2
2
,
2
1
,
2
2
=
=
m
m
m
m
x
x
x
x
x
x
x
x
L
M
O
M
M
L
M
.
y
,
,
2
k
=
k
m
k
y
y
M
Macierz
W
zdefiniowana jest poprzez zapytanie
x
jako
gdzie
Σ
jest wektorem wag dla poszczególnych pomiarów.
21.6. Autonomiczne sterowanie
ś
migłowcem
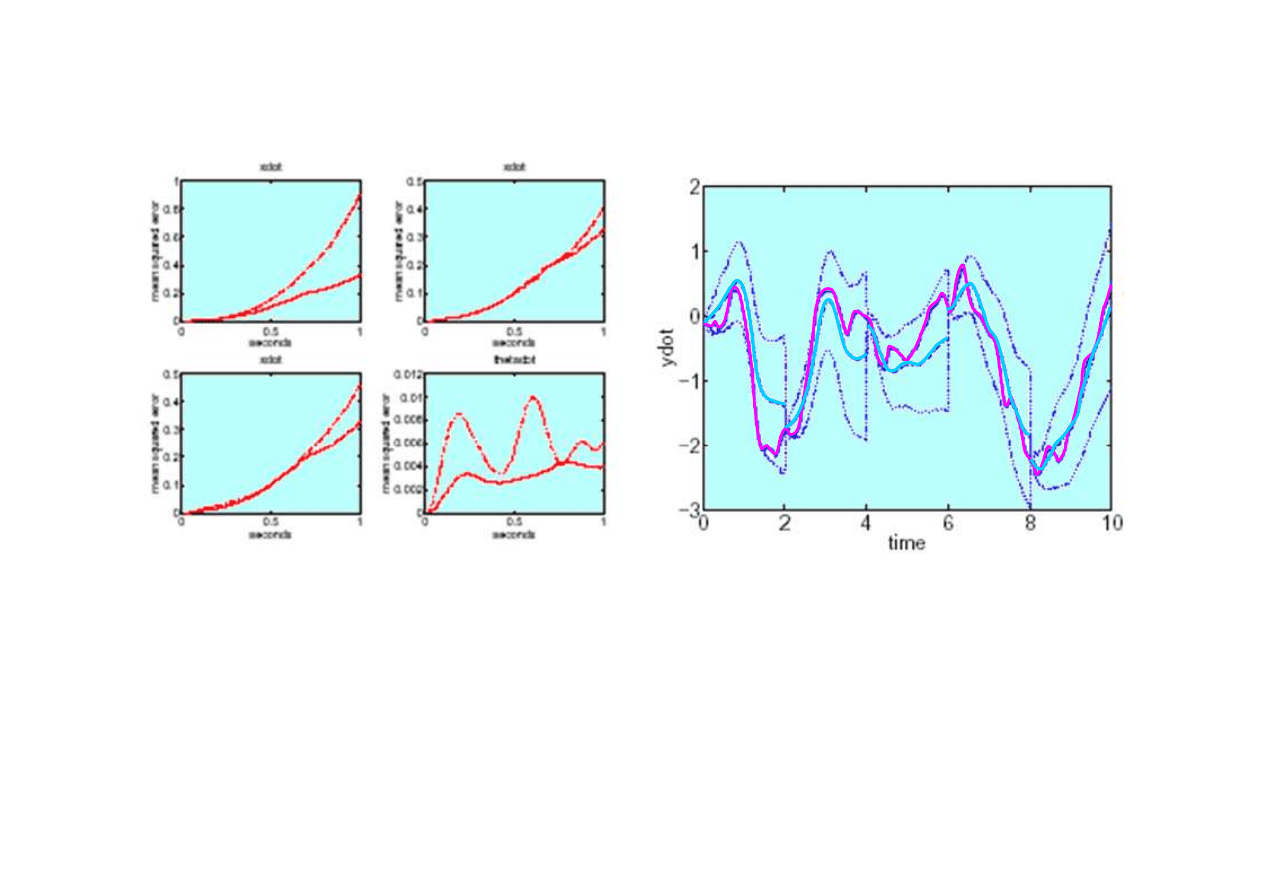
Wyniki identyfikacji
Przykład przebiegu zmiennej
stanu
y’(t)
(
——
) oraz jej predykcji
(
——
) wraz z odchyleniem
standardowym bł
ę
du (
- - - -
).
© F.A. Dul 2007
Narastanie bł
ę
dów estymacji w czasie
(a)
x’(t)
bez uwzgl
ę
dnienia
a
1
(b)
x’(t)
bez uwzgl
ę
dnienia szumu,
(c)
x’(t)
dla modelu liniowego,
(d)
θ
’(t)
dla modelu liniowego
21.6. Autonomiczne sterowanie
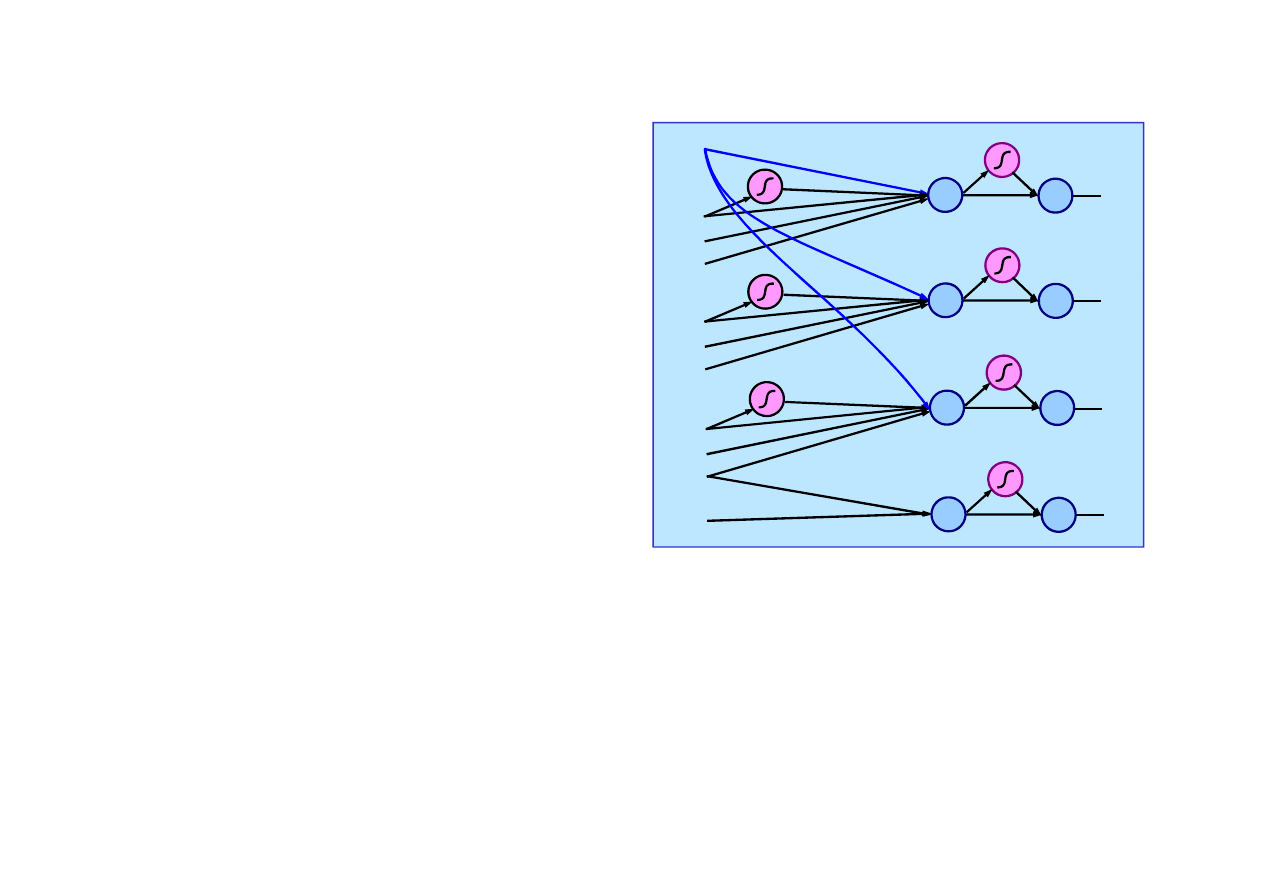
ś
migłowcem
Do reprezentacji strategii
sterowania
ś
migłowcem
w zawisie wykorzystano sie
ć
neuronow
ą
acykliczn
ą
.
Struktura sieci została wybrana
tak, aby sterowania były
zwi
ą
zane z odpowiadaj
ą
cym
im zmiennym stanu.
Uczenie lotu w zawisie
+1
ΣΣΣΣ
err
x
a
1
θ
x&
ΣΣΣΣ
ΣΣΣΣ
err
y
a
2
φ
y&
ΣΣΣΣ
ΣΣΣΣ
err
z
a
3
z&
ΣΣΣΣ
© F.A. Dul 2007
θ
6
5
4
3
2
1
1
)
tanh(
w
x
w
err
w
w
err
w
w
t
x
x
+
+
+
+
=
&
1
9
1
8
7
1
)
tanh(
t
w
t
w
w
a
+
=
z&
ψ
&
ΣΣΣΣ
err
ψ
a
4
ΣΣΣΣ
Bł
ę
dy stanu
s
wzgl
ę
dem stanu po
żą
danego
s*
odpowiadaj
ą
-
cego zawisowi s
ą
równe
*
s
s
err
s
−
=
Przykładowo, sterowanie pochyleniem wirnika ma posta
ć
Sie
ć
ma dziesi
ęć
wej
ść
, jedn
ą
warstw
ę
ukryt
ą
, cztery wyj
ś
cia
i 32 współczynniki wagowe
w
i
.
21.6. Autonomiczne sterowanie
ś
migłowcem
Funkcje nagrody dla stanu i sterowania maj
ą
postacie
)
*)
(
*)
(
*)
(
*)
(
(
)
(
2
2
2
2
2
2
2
ψ
ψ
α
α
α
α
α
α
α
ψ
−
+
+
+
+
+
−
+
−
+
−
−
=
&
&
&
&
&
&
&
z
y
x
z
z
y
y
x
x
s
R
z
y
x
z
y
x
)
(
)
(
2
4
2
3
2
2
2
1
4
3
2
1
a
a
a
a
a
R
a
a
a
a
α
α
α
α
+
+
+
−
=
Współczynniki
α
x
,...,
α
a4
zapewniaj
ą
porównywalne wkłady
poszczególnych wyrazów do funkcji nagród.
Do wyznaczania przybli
ż
onych u
ż
yteczno
ś
ci strategii
Ū
(
π
)
zastosowana została metoda P
EGASUS.
© F.A. Dul 2007
zastosowana została metoda P
EGASUS.
Poniewa
ż
strategie
π
s
ą
gładkimi funkcjami wag sieci, to
maksymalizacja
Ū
(
π
)
mo
ż
e by
ć
przeprowadzona metod
ą
najwi
ę
kszego spadku lub metod
ą
gradientow
ą
.
Najkosztowniejsz
ą
cz
ęś
ci
ą
algorytmu
P
EGASUS
jest wyznaczanie sekwencji
stanów
s’
metod
ą
Monte Carlo.
Pierwszy zawis sterowany autonomicznie
⇒
⇒
⇒
⇒
Wyznaczona strategia sterowania
umo
ż
liwiła autonomiczne pilotowanie
ś
migłowcem w zawisie.
21.6. Autonomiczne sterowanie
ś
migłowcem
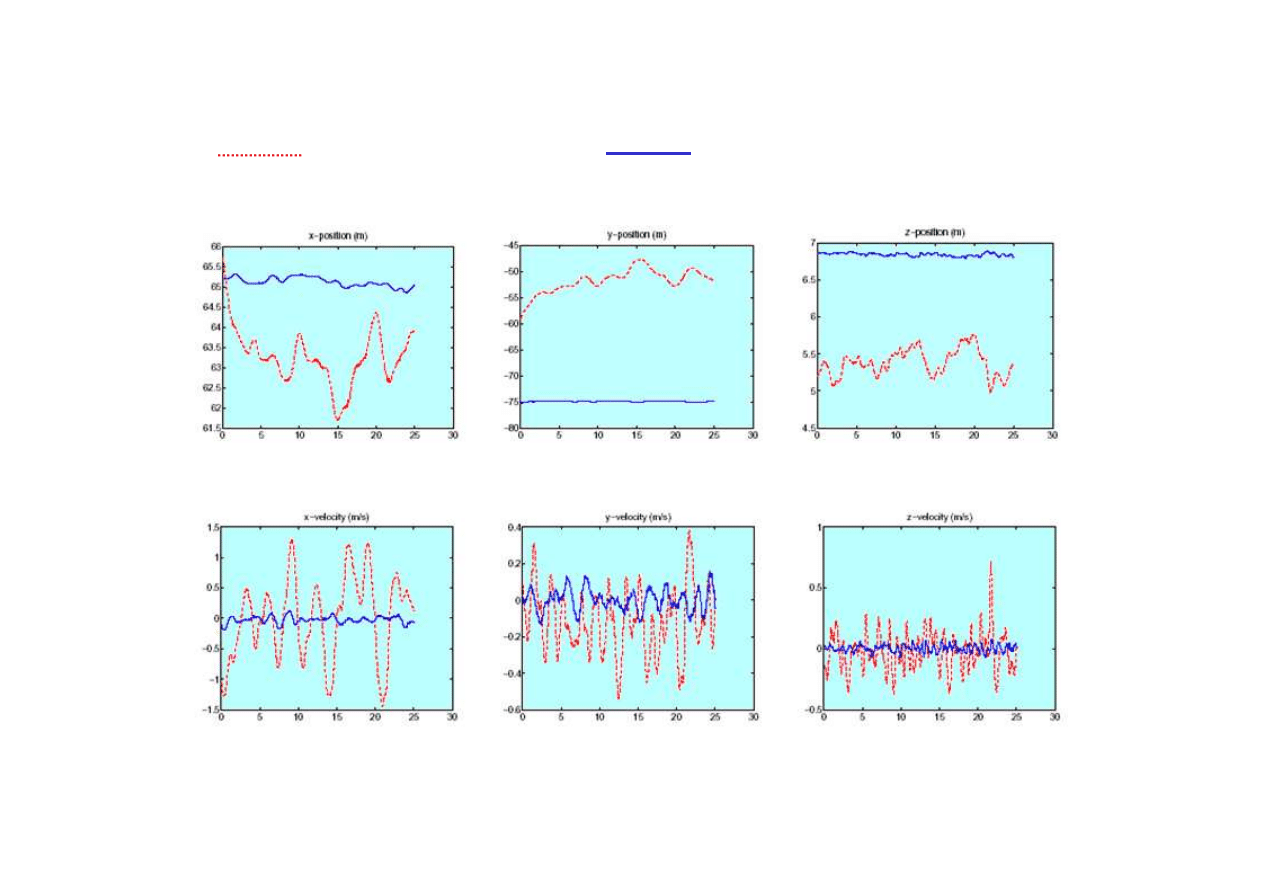
Porównanie sterowania
ś
migłowcem w zawisie:
do
ś
wiadczony pilot,
sterownik neuronowy
• bł
ą
d poło
ż
enia (x-x*,y-y*,z-z*)
© F.A. Dul 2007
Nauczony sterownik neuronowy jest w stanie utrzymywa
ć
zawis
ś
migłowca
bardziej precyzyjnie ni
ż
człowiek
.
• bł
ą
d pr
ę
dko
ś
ci (v
x
,v
y
,v
z
)
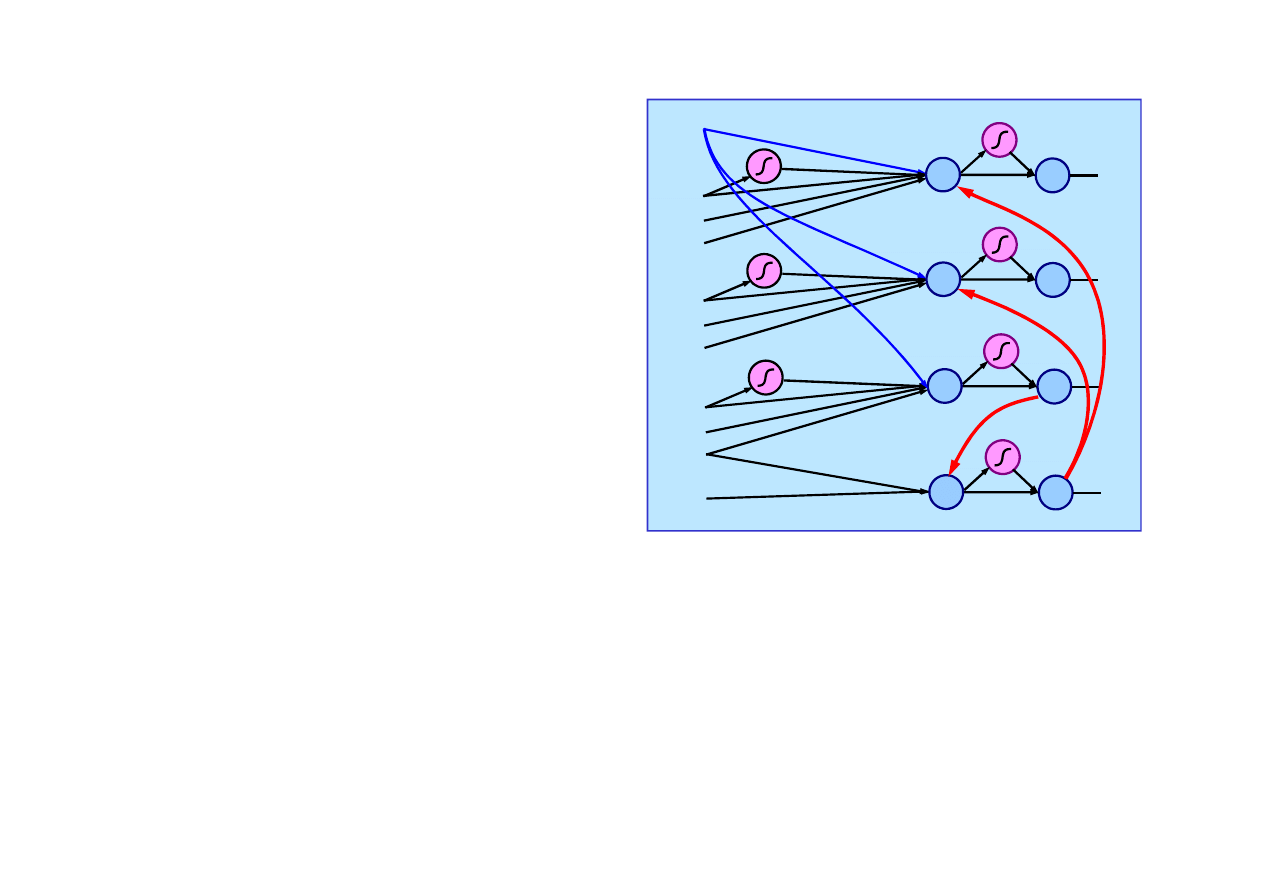
21.6. Autonomiczne sterowanie
ś
migłowcem
Do reprezentacji strategii
sterowania
ś
migłowcem w
manewrach u
ż
yto sieci
neuronowej stosowanej dla
zawisu, uzupełnionej trzema
poł
ą
czeniami (
→
→
→
→
).
Uczenie manewrów
Strategie sterowania dla
manewrów otrzymuje si
ę
poprzez gładkie przej
ś
cie ze
+1
Σ
err
x
a
1
θ
x&
Σ
Σ
err
y
a
2
φ
y&
Σ
Σ
err
z
a
3
z&
Σ
ψ
&
© F.A. Dul 2007
Metoda P
EGASUS
pozwoliła wyznaczy
ć
strategi
ę
sterowania
ś
migłowcem dla manewrów wykonywanych na zawodach
ś
migłowców sterowanych zdalnie w Klasie III,
odpowiadaj
ą
cej najwy
ż
szemu poziomowi trudno
ś
ci.
poprzez gładkie przej
ś
cie ze
stanu dla zawisu
s*
do stanu
dla manewru
s
p
(t),
Funkcje nagrody dla stanu i sterowania s
ą
zmodyfikowane
pod k
ą
tem uwzgl
ę
dnienia zmiennej trajektorii.
),
(
*
),
(
*
),
(
*
),
(
*
t
t
z
z
t
y
y
t
x
x
p
p
p
p
ψ
ψ
→
→
→
→
ψ
&
Σ
err
ψ
a
4
Σ
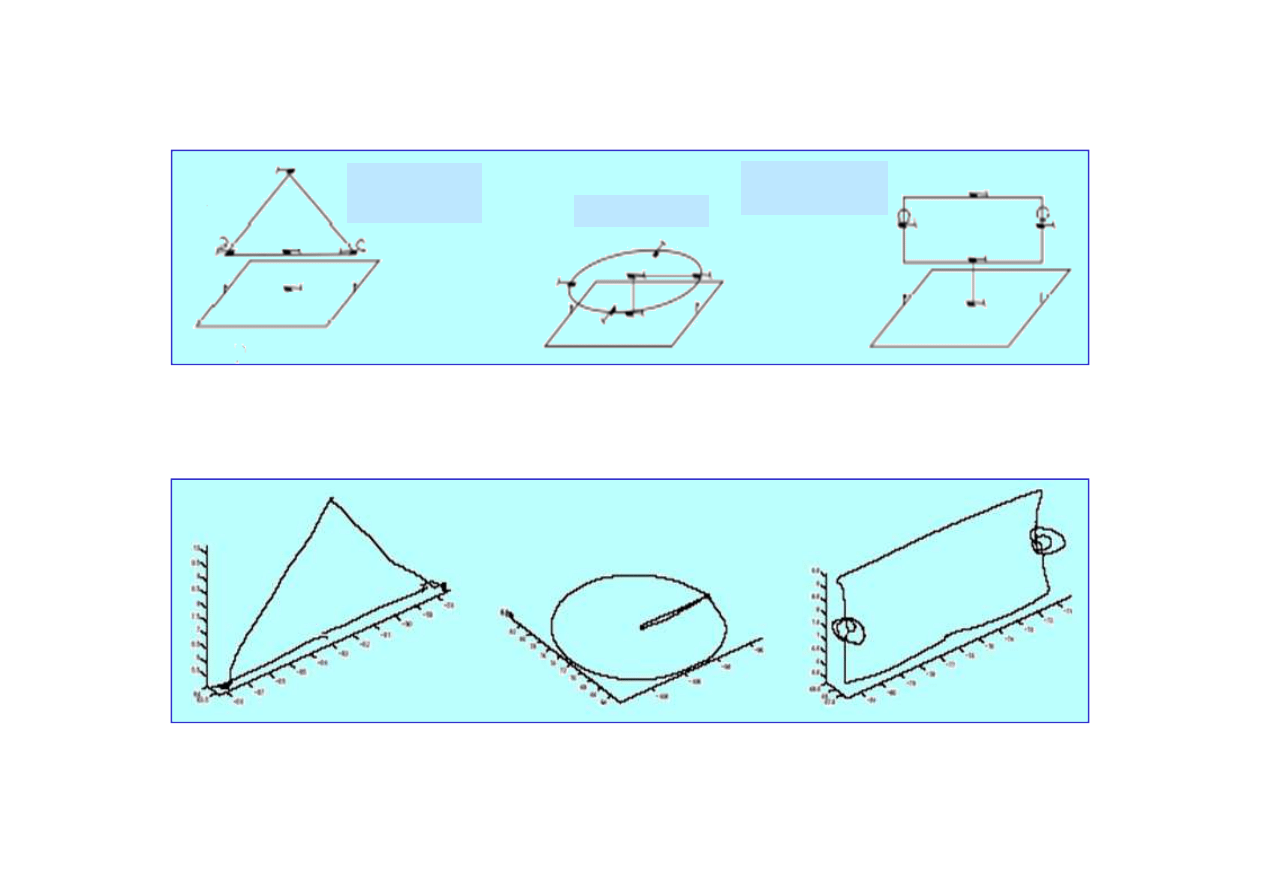
Trójk
ą
t pionowy
z obrotem o 180
stopni
Nos na okr
ę
gu
Prostok
ą
t pionowy
z obrotem o 360
stopni
Manewry
ś
migłowca wykonywane przez pilotów na zawodach
Manewry wykonywane przez
ś
migłowiec sterowany
autonomicznie sterownikiem uczonym algorytmem P
EGASUS.
21.6. Autonomiczne sterowanie
ś
migłowcem
© F.A. Dul 2007
autonomicznie sterownikiem uczonym algorytmem P
EGASUS.
Precyzja manewrów wykonywanych przez
ś
migłowiec
sterowany autonomicznie była zadowalaj
ą
ca.
Manewr „nos na okr
ę
gu”
21.6. Autonomiczne sterowanie
ś
migłowcem
© F.A. Dul 2007
Przedstawione rezultaty ilustruj
ą
potencjalne mo
ż
liwo
ś
ci
algorytmów uczenia ze wzmocnieniem w dziedzinie
bezpilotowych pojazdów autonomicznych (UAV).

Podsumowanie
• Uczenie ze wzmocnieniem polega na budowie modelu
na podstawie nagród i kar otrzymywanych przez agenta.
• Struktura agenta okre
ś
la rodzaj informacji ucz
ą
cej.
• Istniej
ą
trzy typy struktur agenta uczonego ze wzmocnieniem:
– oparta na modelu
ś
rodowiska
T
i funkcji u
ż
yteczno
ś
ci
U
,
– oparta n funkcji działania
Q,
nie wykorzystuj
ą
ca modelu
ś
rodowiska,
– refleksowa, u
ż
ywaj
ą
ca zało
ż
on
ą
strategi
ę
π
.
• Istniej
ą
trzy sposoby uczenia si
ę
u
ż
yteczno
ś
ci przez agenta:
– bezpo
ś
rednia estymacja u
ż
yteczno
ś
ci,
– adaptacyjne programowanie dynamiczne (ADP),
©
F.A. Dul 2007
– adaptacyjne programowanie dynamiczne (ADP),
– ró
ż
nicowa (TD).
• Uczenie z funkcj
ą
działania
Q
nie wymaga modelu
ś
rodowiska,
ale mo
ż
e by
ć
utrudnione w
ś
rodowisku zło
ż
onym.
• Wybór działania w trakcie uczenia wymaga kompromisu
pomi
ę
dzy jego skuteczno
ś
ci
ą
i u
ż
yteczno
ś
ci
ą
w nauce.
• Poszukiwanie strategii polega na bezpo
ś
redniej reprezentacji
strategii i jej ulepszaniu na podstawie oceny skuteczno
ś
ci
działa
ń
.
Wyszukiwarka
Podobne podstrony:
21 Uczenie ze wzmocnieniem
21 powodow,ze zyjesz XXI wieku
uczenie ze wzm41
21 Udowodnić, że w odwzorowaniu azymutalnym, ukośnym sfery, izoliniami skali pola są koła horyzontal
(odc 21) deser ze świeżych owoców
Ściąga ze sztucznej inteligencji(1), uczenie maszynowe, AI
Rola rodziców we wspomaganiu rozwoju dzieci ze specyficznymi trudnościami w uczeniu się
eco sciaga, 21. Rodzaje kosztow w przedsiebiorstwie, Prawo popytu - wraz ze wzrostem ceny danego dob
Dzieci ze specyficznymi trudnościami w uczeniu się matematyki
21, Dlaczego mówimy że poezja Kochanowskiego jest uniwersalna
E GRUSZCZYK KORCZYŃSKA DZIECI ZE SPECYFICZNYMI TRUDNOŚCIAMI W UCZENIU SIĘ MATEMATYKI(streszczenie)
E. GRUSZCZYK-KORCZYŃSKA - DZIECI ZE SPECYFICZNYMI TRUDNOŚCIAMI W UCZENIU SIĘ MATEMATYKI, E.Gruszczyk
Socjologia 21.04, Uchodźcy ze Sri Lanki
Pedersen Bente Raija ze śnieżnej krainy 21 W cieniu trosk
Dzieci ze spacyficznymi trudnościami w uczeniu się matematyki Gruszczyk kolczyńska zajęcia 5
Potrzeby uczniów ze specyficznymi trudnościami w nauce, specyficzne trudności w uczeniu się, SPE
gruszczyk kolczyska scenariusze zaj Dzieci ze spacyficznymi trudnociami w uczeniu si matematyki tema
Wewnątrzszkolny system wspomagania uczniów ze specyficznymi trudnościami w uczeniu się
więcej podobnych podstron