
1
Ćwiczenie 6
ZASTOSOWANIE STEROWNIKA PLC W KOMPUTEROWYCH
SYSTEMACH POMIAROWO-DIAGNOSTYCZNYCH
Spis treści
1.
CEL ĆWICZENIA ................................................................................................................................. 2
2.
STEROWNIKI PLC ............................................................................................................................... 2
3.
ELEMENTY STANOWISKA BADAWCZEGO .................................................................................. 3
3.1
S
TEROWNIK
PLC
CQM1-CPU21 ........................................................................................................... 3
3.2
P
ODSTAWOWE PARAMETRY CZUJNIKÓW
................................................................................................ 4
3.3
A
LOKACJA
W
E
/W
Y
................................................................................................................................ 6
4.
OPIS ŚRODOWISKA PROGRAMISTYCZNEGO CX-PROGRAMER VER.5.0 .............................. 6
4.1
E
KRANY ROBOCZE
.................................................................................................................................. 6
4.2
K
OMPILOWANIE
,
URUCHAMIANIE I PRZENOSZENIE PROGRAMU DO STEROWNIKA
PLC ........................... 8
5.
PRZEBIEG ĆWICZENIA ..................................................................................................................... 9
5.1
T
WORZENIE PROSTEGO PROGRAMU STERUJĄCEGO
................................................................................. 9
5.1.1
Tworzenie nowego projektu. Wykonywanie ustawień dla jednostki sterującej PLC ......................... 9
5.1.2
Wprowadzanie styków ..................................................................................................................... 11
5.1.3
Wprowadzanie cewek wyjściowych ................................................................................................. 13
5.1.4
Wprowadzenie pozostałych styków i cewek ..................................................................................... 13
5.2
B
ADANIE WŁAŚCIWOŚCI CZUJNIKÓW
.................................................................................................... 15
6.
WYKONANIE SPRAWOZDANIA ..................................................................................................... 15
6.1
O
PRACOWANIE WYNIKÓW
.................................................................................................................... 15
6.2
P
YTANIA I ZAGADNIENIA
...................................................................................................................... 15
LITERATURA ............................................................................................................................................. 16

2
1.
Cel ćwiczenia
Celem ćwiczenia jest zdobycie podstawowych umiejętności z zakresu programowania
i obsługi systemów sterowania opartych na programowalnych sterownikach PLC. Poznanie
właściwości typowych czujników stosowanych w przemyśle.
2.
Sterowniki PLC
PLC (Programowalny Sterownik Logiczny) (ang. Programmable Logic Controller) –
uniwersalne urządzenie mikroprocesorowe przeznaczone do sterowania pracą maszyny lub
urządzenia technologicznego. Sterownik PLC musi zostać dopasowany do określonego
obiektu sterowania poprzez wprowadzenie do jego pamięci żądanego algorytmu działania
obiektu. Cechą charakterystyczną sterowników PLC odróżniającą ten sterownik od innych
sterowników komputerowych jest cykliczny obieg pamięci programu. Algorytm jest
zapisywany w dedykowanym sterownikowi języku programowania. Istnieje możliwość
zmiany algorytmu przez zmianę zawartości pamięci programu. Sterownik wyposaża się
w odpowiednią liczbę układów wejściowych zbierających informacje o stanie obiektu
i żądaniach obsługi oraz odpowiednią liczbę i rodzaj układów wyjściowych połączonych
z elementami wykonawczymi, sygnalizacyjnymi lub transmisji danych.
Podstawową zasadą pracy sterowników jest praca cykliczna, w której sterownik
wykonuje kolejno po sobie pojedyncze rozkazy programu w takiej kolejności, w jakiej są one
zapisane w programie. Na początku każdego cyklu program odczytuje "obraz" stanu wejść
sterownika i zapisuje ich stany (obraz wejść procesu). Po wykonaniu wszystkich rozkazów i
określeniu (wyliczeniu) aktualnego dla danej sytuacji stanu wyjść, sterownik wpisuje stany
wyjść do pamięci będącej obrazem wyjść procesu a system operacyjny wysterowuje
odpowiednie wyjścia sterujące elementami wykonawczymi. Tak więc wszystkie połączenia
sygnałowe spotykają się w układach (modułach) wejściowych sterownika, a program śledzi
ich obraz i reaguje zmianą stanów wyjść w zależności od algorytmu.
Cykl pracy sterownika można zapisać krokowo:
1.
Autodiagnostyka
2.
Odczyt wejść
3.
Wykonanie programu
4.
Zadania komunikacyjne
5.
Ustawienia wyjść
Firmy produkujące sterowniki programowalne dostarczają zwykle wraz z nimi
ś
rodowisko programistyczne, pozwalające pisać aplikacje w jednym lub kilku językach
programowania. Języki te są zwykle mniej lub bardziej dokładną implementacją zaleceń
normy IEC 61131-3, która to norma definiuje następujące warianty:
•
LD (Ladder Diagram) logika drabinkowa - schemat zbliżony do klasycznego rysunku
technicznego elektrycznego;
•
FBD (Function Block Diagram) - diagram bloków funkcyjnych, sekwencja linii
zawierających bloki funkcyjne;
•
ST (Structured Text) tekst strukturalny - język zbliżony do Pascala;
•
IL (Instruction List) lista instrukcji - rodzaj asemblera;
•
SFC (Sequential Function Chart) sekwencyjny ciąg bloków - sekwencja bloków
programowych z warunkami przejścia.
3
Ś
rodowiska do programowania PLC są albo produktem firm wytwarzających sterowniki albo
też niezależnych firm informatycznych.
Sterowniki PLC składają się z:
•
jednostki centralnej (CPU)
•
bloków wejść cyfrowych
•
bloków wejść analogowych
•
bloków komunikacyjnych
•
bloków wyjść cyfrowych
•
bloków wyjść analogowych
•
bloków specjalnych
•
pamięci ROM, PROM, EPROM, EEPROM
3.
Elementy stanowiska badawczego
Stanowisko badawcze składa się z następujących elementów:
•
Komputer PC z zainstalowanym oprogramowaniem CX-Programmer Ver.5.0
•
Zasilacz 60W 24VDC, Mean Well DR-60-24
•
Sterownik PLC CQM1-CPU21 firmy OMRON
•
Czujniki:
o
pojemnościowy Carlo Gavazzi CA18CLN12PAM
o
ś
wiatłowodowy OMRON E3S-X3CB4
o
indukcyjny IFM Electronic IN5258
o
fotoelektryczny (laserowy) OMRON E3Z-LL83
o
indukcyjny czujnik zbliżeniowy ICZ D8 CN PNP A1 firmy IMPOL-1
o
fotoelektryczny Micro Detectors SSC/DP-0E
o
diody LED - 6 szt.
o
Stojak do badania własności czujników (zasięgu i kąta działania)
o
6 próbek wykonanych z różnego materiału (stal, stal nierdzewna, stal
kwasoodporna, miedź, aluminium, szkło (lustro)).
3.1
Sterownik PLC CQM1-CPU21
W ćwiczeniu został wykorzystany kompaktowy sterownik PLC CQM1-CPU21 firmy
OMRON. Składa się on z zasilacza, szybkiej jednostki obliczeniowej, oraz portów I/O. Jest
wyposażony w port RS-232C umożliwiający bezpośrednie połączenie z komputerem lub
innymi sterownikami PLC.
Główne cechy i funkcje sterowników z rodziny CQM1:
•
Jednostki CPU zapewniają 16 wbudowanych gniazd wejściowych
•
Porty I/O można rozbudowywać w celu zwiększenia ich liczby
•
CQM1 dysponują stosunkowo dużą mocą obliczeniową i szybkością wykonywania
obliczeń
•
Szybkie liczniki są wbudowane
•
Możliwość sterowania wyjściami podczas wykonywania instrukcji (wyjścia
bezpośrednie)
4
3.2
Podstawowe parametry czujników
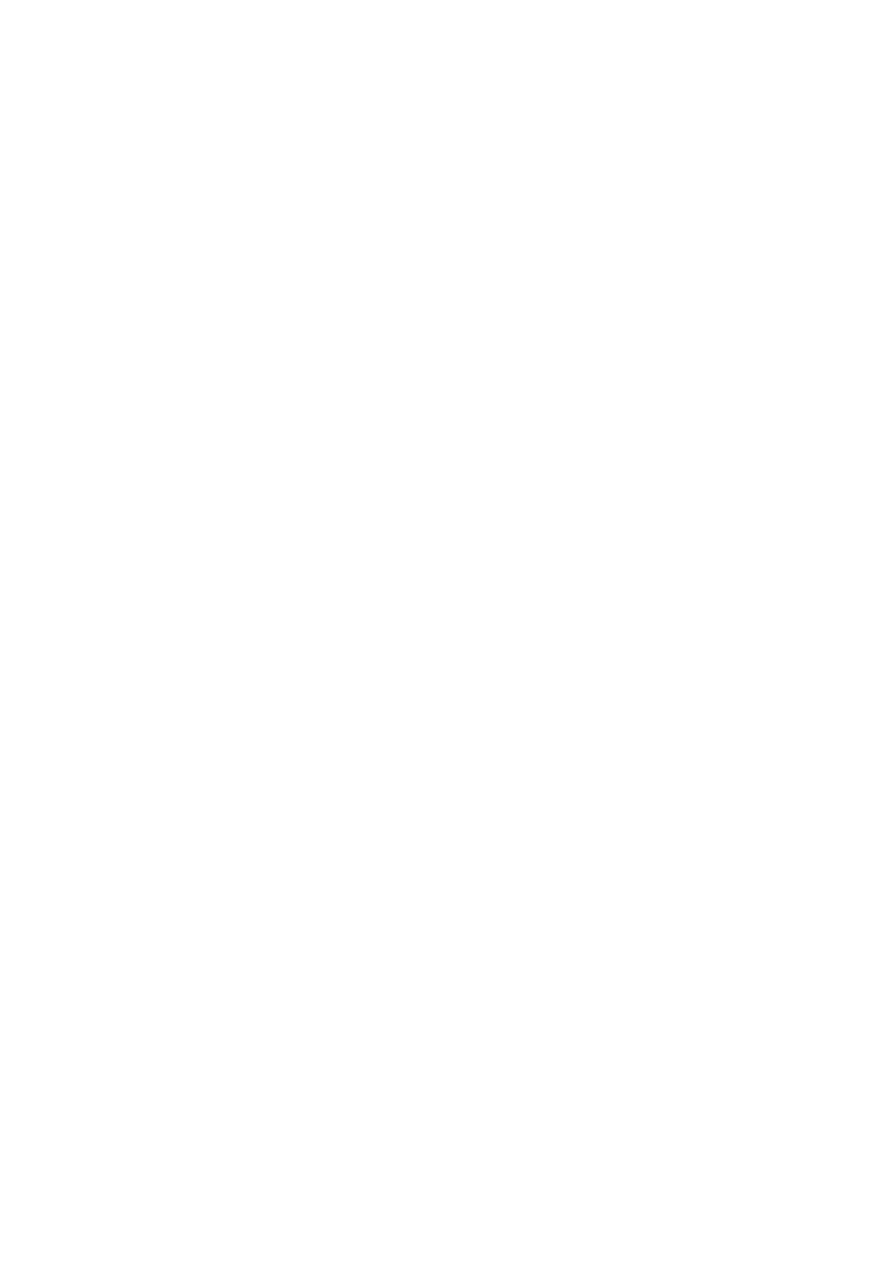
pojemnościowy Carlo Gavazzi CA18CLN12PAM
Znamionowy zasięg
pracy
3 – 12 mm (fabrycznie
ustawiony na 12 mm)
Temperatura pracy
Od -25°C do +80°C
Histereza
Od 4 do 20% zasięgu pracy
Napięcie znamionowe Od 10 do 40 VDC
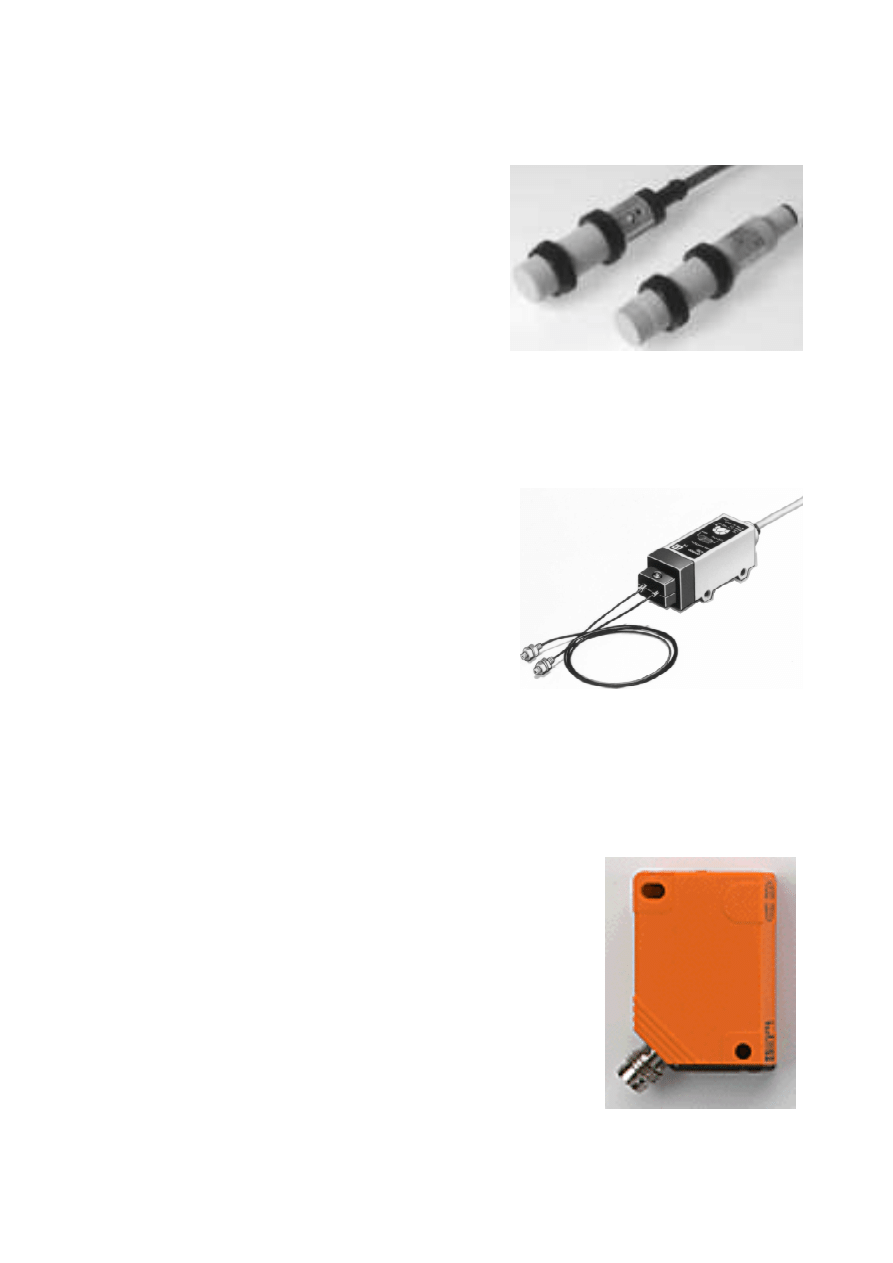
Światłowodowy OMRON E3S-X3CB4
Typ
PNP
Napięcie zasilania
12VDC –10% do 24VDC
+10%, pulsacja 10% max.
Pobór prądu
50 mA max.
Napięcie wyjściowe
2 V max.
Czas reakcji (ON,
OFF)
1 ms max.
Temperatura pracy
Od -25°C do +55°C
Ź
ródło światła
Podczerwień, dioda LED
Wrażliwość
Nastawna
Indukcyjny IFM Electronic IN5258
Wykonanie elektryczne
DC PNP/NPN
Napięcie zasilania
10…55 VDC
Wyjście
Normalnie otwarty/zamknięty
programowalne
Spadek napięcia
< 4,6 V
Minimalny prąd obciążenia
4 mA
Prąd znamionowy
400 mA
Zasięg działania
4 mm
Efektywny zasięg działania (Sr)
4 mm ± 10%
5
Gwarantowany zasięg działania
0…3,25 mm
Współczynnik korekcji
Stal (St37) = 1; V2A ok. 0,7;
mosiądz ok. 0,4; Al ok. 0,3; Cu
ok. 0,3
Temperatura pracy
-25°C…80°C
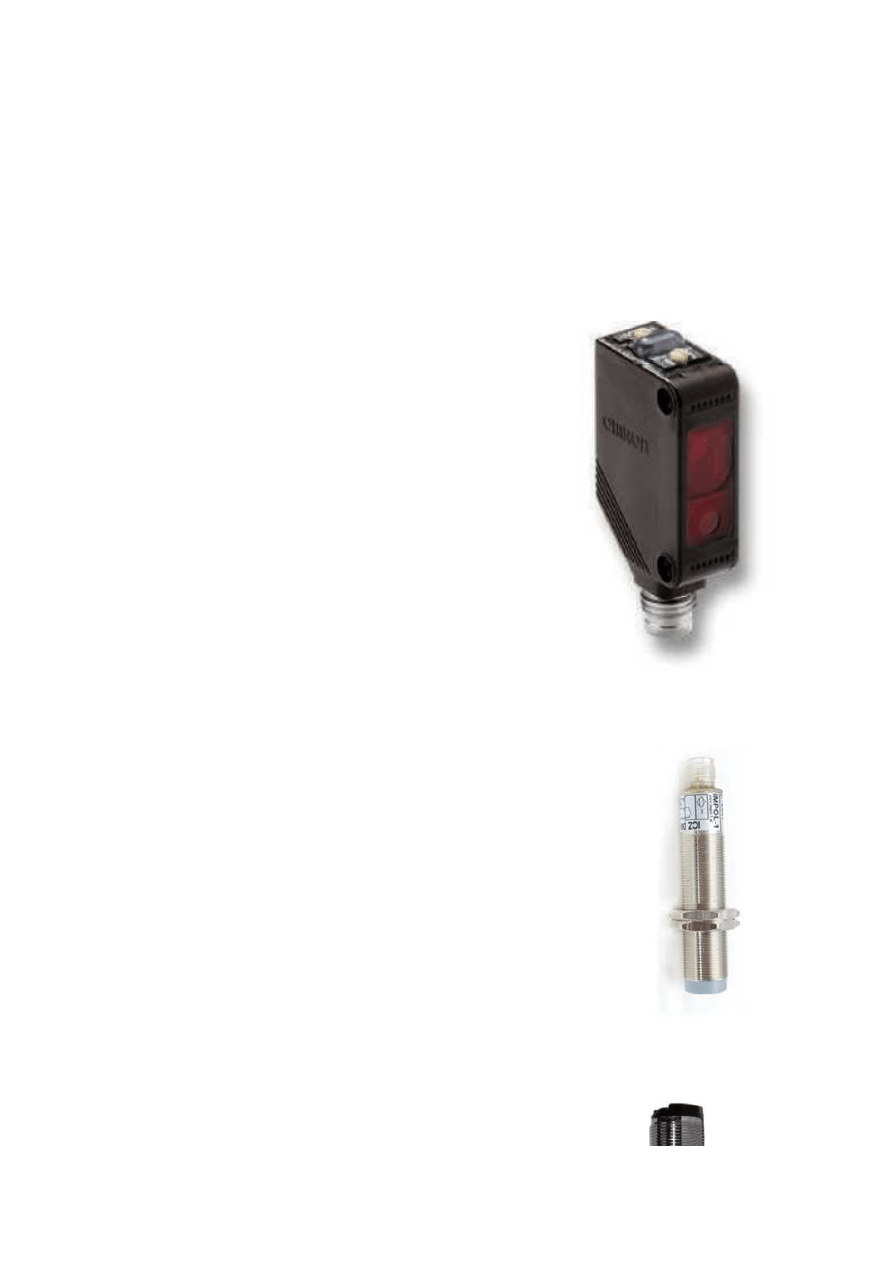
Fotoelektryczny (laserowy) OMRON E3Z-LL83
Zasięg pracy
Ustawiany, Biały papier (100 x 100
mm): 25-300 mm Czarny papier (100
x 100 mm): 25-100 mm
Ś
rednica plamki
0,5 mm przy odległości 300 mm
Błąd czerni/bieli
5% przy 100 mm
Napięcie zasilania
12-24V DC ±10%, pulsacja: maks.
10%
Pobór prądu
Maks. 30 mA
Czas reakcji
Maks. 05, MS
Temperatura pracy
Od -10°C do +55°C
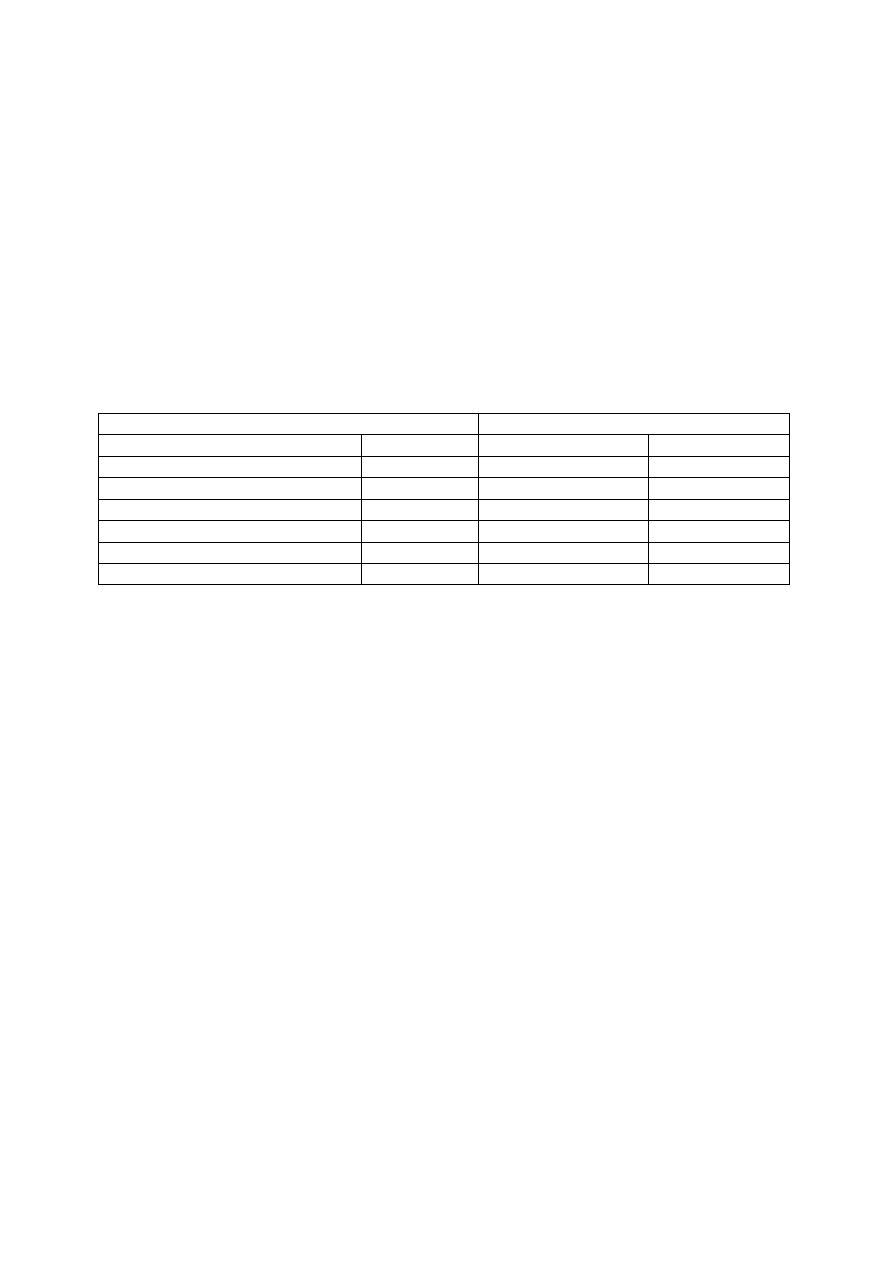
Indukcyjny czujnik zbliżeniowy ICZ D8 CN PNP A1 firmy
IMPOL-1
Napięcie pracy
6-30 V DC
Prąd obciążenia
0-400 mA
Napięcie szczątkowe
< 2 V
Histereza
1,5…15%
Zakres temperatur pracy
Od -25 do +70°C
Znamionowa odległość działania (Sn) 8 mm
Fotoelektryczny Micro Detectors SSC/DP-0E
Nominalny zasięg
4 m z odbłyśnikiem RL 110
6
działania
Emisja
Podczerwień (880 nm)
Napięcie pracy
10 – 30 V DC
Pobór prądu
30 mA
Prąd obciążenia
100 mA
Temperatura pracy
Od -25 do +70°C
3.3
Alokacja We/Wy
W tabeli poniżej przedstawiono adresy podłączonych urządzeń:
Wejścia
Wyjścia
Urządzenie
Adres
Etykieta diody
Adres
OMRON E3S-X3CB4
0.00
Fotolaser
100.00
IMPOL-1 ICZ D8 CN PNP A1
0.01
IND.4
100.01
Micro Detectors SSC/DP-0E
0.02
Foto
100.02
IFM Electronic IN5258
0.03
IND.8
100.03
Carlo Gavazzi CA18CLN12PAM
0.04
Pojem.
100.04
OMRON E3Z-LL83
0.05
Laser
100.05
4.
Opis środowiska programistycznego CX-Programer Ver.5.0
CX-Programer to oprogramowanie narzędziowe (software) służące do tworzenia
programów drabinkowych przeznaczonych m.in. dla modułu CQM1-CPU21. Jest ono częścią
zintegrowanego środowiska CX-One. Oprócz funkcji związanych z programowaniem oferuje
ono także szereg innych funkcji służących do ustawiania i obsługi modułu sterownika PLC,
takich jak np. usuwanie błędów w programach, wyświetlanie adresów i wartości, ustawianie
i monitorowanie sterownika PLC oraz zdalne programowanie i monitorowanie za
pośrednictwem sieci.
4.1
Ekrany robocze
W tym rozdziale przedstawiono i omówiono funkcje dostępne w oknie głównym
aplikacji CX-Programmer.
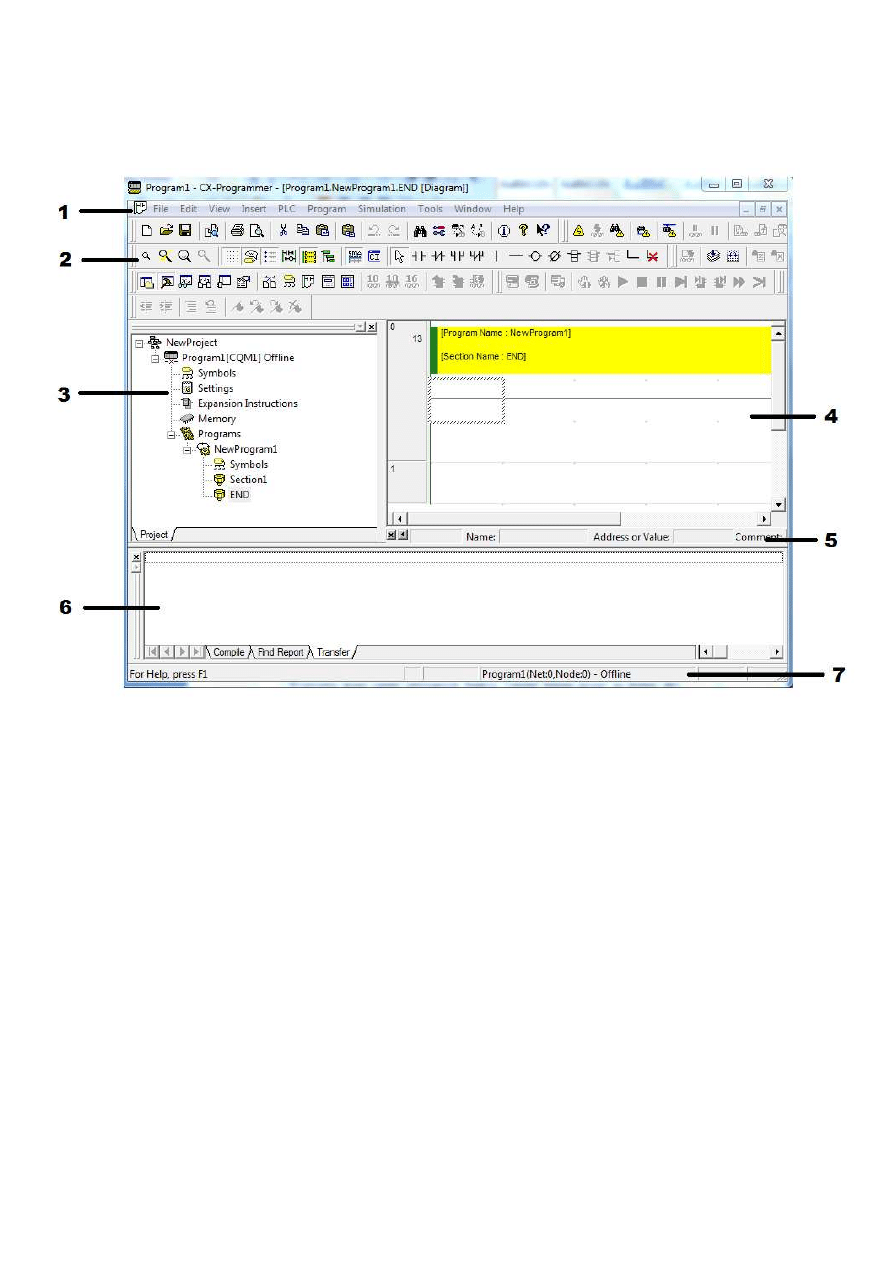
Na Rys.1. przedstawiono okno główne programu składające się z kilku elementów.
Menu główne (1) służy do wybierania funkcji aplikacji CX-Programmer. Paski narzędzi (2)
zawierają ikony często wybieranych funkcji programu. W obszarze roboczym projektu (3)
znajduje się drzewo projektu. Służy ono do zarządzania programami i ustawieniami. Do
tworzenia i edycji programów drabinkowych służy obszar roboczy diagramu (4). Pasek
komentarzy (5) wyświetla nazwę, adres/wartość i komentarz We/Wy dla zmiennej wybranej
za pomocą kursora myszy. Bardzo ważnym elementem jest okno wyjściowe (6). Pokazuje
ono wyniki kompilacji, błędy, wyniki wyszukiwania styków, instrukcji i cewek. Wyświetla
również błędy powstałe podczas ładowania pliku projektu. Pasek stanu (7) przedstawia
informacje takie jak nazwa sterownika PLC, stan online/offline i pozycja aktywnej komórki.
7
Jeśli w trybie online wystąpi błąd połączenia lub inny i zostanie zarejestrowany w dzienniku
błędów, to wyświetlany będzie migający czerwony komunikat o błędzie.
Rys.1. Okno główne programu roboczego
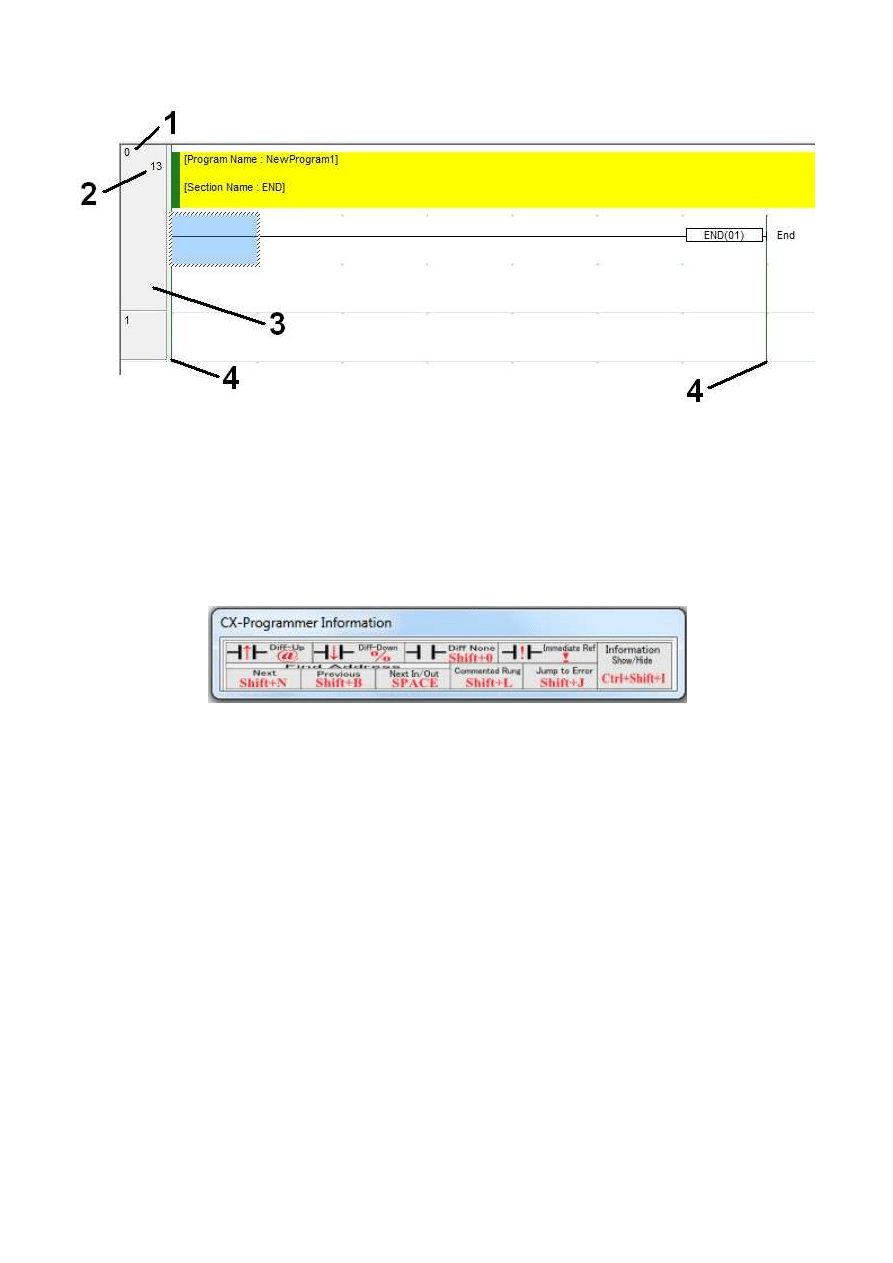
Obszar roboczy diagramu przedstawiono na rys.2. W lewym górnym rogu
umieszczony jest numer linii (1) i adres programu (2). Jeśli dana linia jest niekompletna na
prawo od pola nagłówka tej linii (3) wyświetlane będzie czerwone pole.
8
Rys. 2. Obszar roboczy diagramu. 1- numer linii, 2- adres programu, 3- pole nagłówka linii,
4- pasek magistrali.
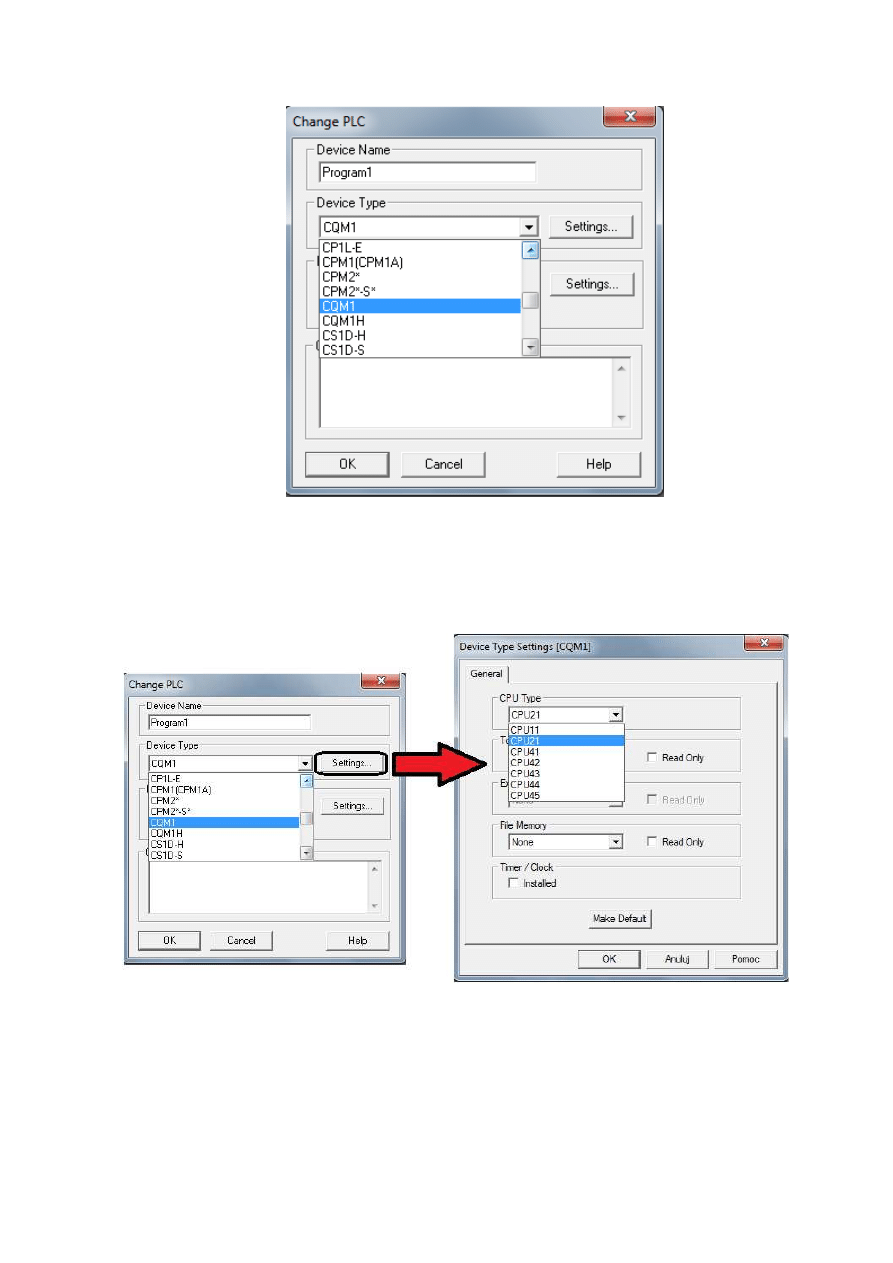
Okno informacyjne (rys.3.) wyświetla podstawowe skróty klawiaturowe używane
w aplikacji CX-Programmer. Aby pokazać/ukryć z menu głównego wybierz kolejno [View] –
[Windows] – [Information Window].
Rys.3. Okno informacyjne.
4.2
Kompilowanie, uruchamianie i przenoszenie programu do sterownika PLC
Kompilowanie programu
W trakcie kompilacji można sprawdzić, czy program zawiera błędy. Z menu głównego
wybierz kolejno [Program] – [Compile All PLC Programs]. Rozpocznie się kompilacja. Po jej
zakończeniu wyniki sprawdzania programu zostaną wyświetlone w oknie wynikowym. Jeśli
wykryty został błąd, kliknij podwójnie komunikat o błędzie w oknie wynikowym. Kursor
zostanie przeniesiony do miejsca, w którym wykryty został błąd. Skoryguj program i spróbuj
ponownie.
Aby konfigurować ustawienia modułu CQM1-CPU21, przenosić programy lub je
wykonywać, komputer i moduł CQM1 muszą być najpierw połączone online.
Połączenie online
Z menu głównego wybierz kolejno [PLC] – [Work Online]. Wyświetlone zostanie pole
dialogowe potwierdzenia przejścia w tryb online. Potwierdzamy [Yes]. Jeśli system wszedł
w tryb online, okno sekcji drabinkowej zostanie podświetlone na zielono. Jeśli przejście
systemu w tryb online nie powiedzie się, należy sprawdzić ustawienia typu sterownika PLC

9
i ustawienia komunikacji. W tym celu kliknij podwójnie pozycję [Program1[CQM1] Offline]
w drzewie projektu.
Stan online to taki, w którym komputer i moduł PLC są ze sobą połączone. W celu
zastosowania w module CQM1 programu stworzonego za pomoca aplikacji CX-Programmer
program ten musi zostać przeniesiony.
Zmiana trybu pracy
Z menu głównego wybierz kolejno [PLC] – [Operating Mode] – [Program]. Zostanie
wyświetlone okno dialogowe potwierdzenia zmiany trybu pracy. Tryb pracy zostanie
wyświetlony na pasku tytułu i w drzewie projektu.
Moduł CQM1-CPU21 ma 3 tryby pracy: PROGRAM, MONITOR i RUN. Tryb pracy
należy zmienić stosownie do operacji, jakie mają być wykonywane. Tryb pracy ma wpływ na
cały program użytkownika i jest wspólny dla wszystkich zadań.
•
Tryb PROGRAM – w tym trybie program jest zatrzymany. Tryb ten jest używany do
przygotowania wykonania programu przez dokonanie wstępnych ustawień, takich jak
konfiguracja
PLC,
przeniesienie
programu,
sprawdzenie
i
wymuszone
ustawienie/resetowanie.
•
Tryb MONITOR – w tym trybie program jest uruchomiony. Można przeprowadzić
edycję online, wymuszone ustawienie/resetowanie i zmiany wartości pamięci We/Wy.
Tryb ten jest także używany do dokonywania regulacji w trakcie uruchomień
testowych.
•
Tryb RUN – w tym trybie program jest uruchomiony. Z tego trybu korzysta się
w trakcie normalnej pracy.
5.
Przebieg ćwiczenia
5.1
Tworzenie prostego programu sterującego
W tej części ćwiczenia zajmiemy się wykonaniem prostego programu sterującego.
Pozwoli to na poznanie i zdobycie podstawowych umiejętności z zakresu obsługi
i programowania sterowników PLC przy pomocy aplikacji CX-Programmer. Krok po kroku
zostanie przedstawiony proces zaprogramowania sterownika PLC CQM1-CPU21 w taki
sposób, aby po wykryciu przez czujnik przedmiotu została włączona odpowiednia dioda LED.
Wykaz czujników i odpowiadających im diod LED znajduje się w podrozdziale 2.3 niniejszej
instrukcji.
5.1.1
Tworzenie nowego projektu. Wykonywanie ustawień dla jednostki
sterującej PLC
Przy pierwszym użyciu aplikacji CX-Programmer trzeba utworzyć nowy projekt.
Podczas wykonywania tej czynności należy ustawić typ urządzenia docelowego i typ
jednostki centralnej dla tworzonego programu i danych.
1.
Z menu głównego wybierz kolejno [File] – [New]. Wyświetlone zostanie pole
dialogowe Change PLC (rys.4). W polu „Device Name” wpisz „Program1”. Z listy
rozwijanej w polu „Device Type” wybierz [CQM1].
10
Rys. 4. Pole dialogowe Change PLC.
2.
Kliknij przycisk [Settings]. Wyświetlone zostanie okno dialogowe Device Type
Settings (rys. 5.). Z listy rozwijanej „CPU Type” Wybierz typ jednostki centralnej
„CPU21” i kliknij [OK.].
Rys. 5. Okno dialogowe wyboru typu jednostki sterującej.
3.
Sprawdź, czy w polu „Network Type” wyświetlona jest pozycja „SYSMAC WAY”
i kliknij [OK]. Okno dialogowe Change PLC zostanie zamknięte. Wyświetlone
zostanie okno główne nowego projektu (rys. 6.).
11
Rys. 6. Okno główne projektu.
5.1.2
Wprowadzanie styków
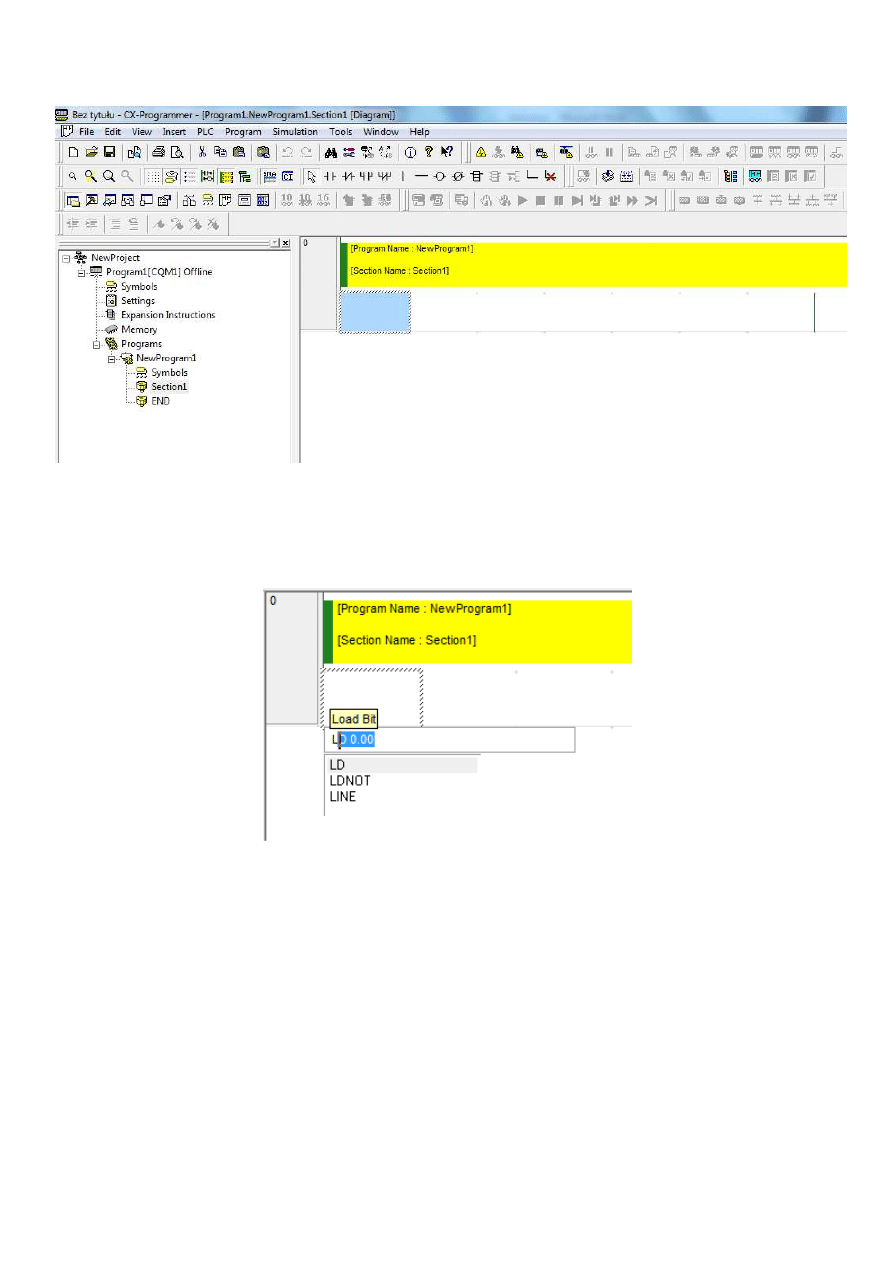
1.
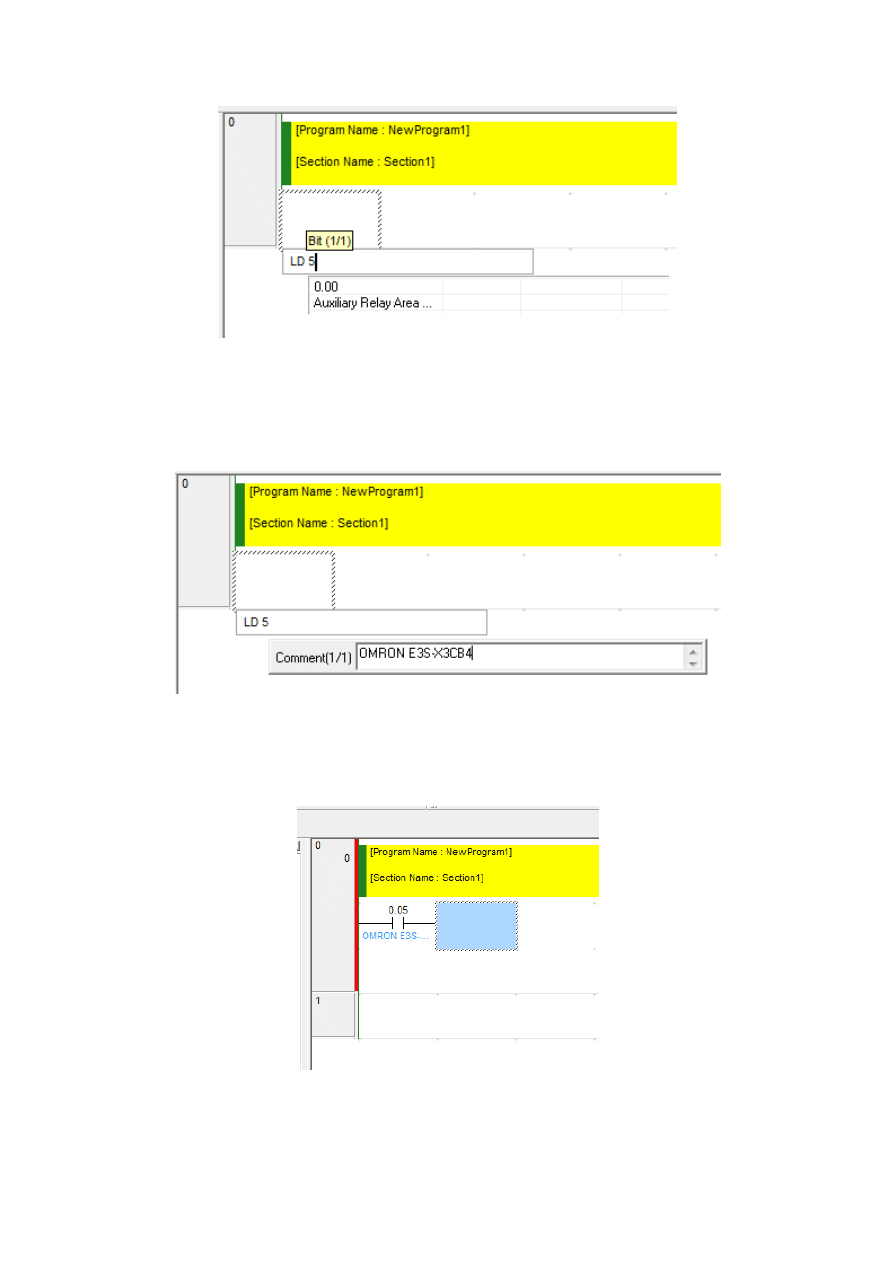
Naciśnij klawisz [C]. Pojawi się napis „LD 0.00” jak jest to przedstawione na rys. 7.
Rys. 7. Wybór styku początkowego.
2.
Naciśnij klawisz [Enter]. Pojawi się napis „Bit (1/1)”. Wpisz adres „5” i ponownie
wciśnij [Enter] (rys. 8).
12
Rys. 8. Wprowadzenie adresu styku.
3.
Wyświetlone zostanie okno dialogowe „Comment” przedstawione na rysunku 9. Jako
komentarz wpisz „OMRON E3Z-LL83”, zatwierdź klawiszem [Enter].
Rys. 9. Okno wprowadzania komentarza.
4.
W programie drabinkowym wyświetlony zostanie styk reprezentujący wejście
z czujnika światłowodowego OMRON E3Z-LL83 (Rys. 10.).
Rys. 10. Styk reprezentujący wejście z czujnika światłowodowego.
13
5.1.3
Wprowadzanie cewek wyjściowych
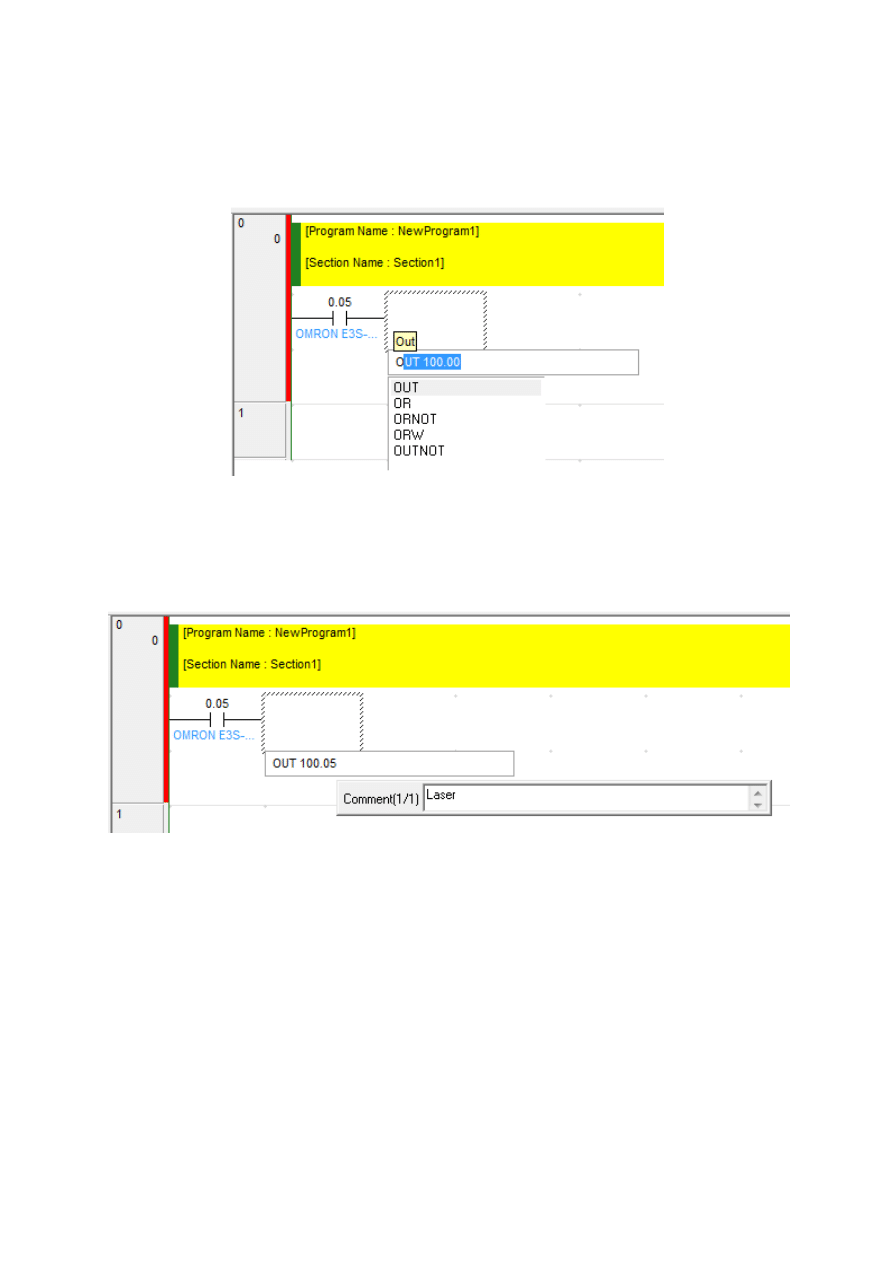
1.
Naciśnij klawisz [O]. Pojawi się napis „OUT 100.00” (rys. 11.).
Rys. 11. Okno wprowadzania cewki wyjściowej.
2.
Naciśnij [Enter]. Pojawi się napis „Bit (1/1)” i adres „100.00” zostanie podświetlony.
Wprowadź adres „100.05”. Potwierdź naciskając [Enter]. Jako komentarz wpisz
„Laser” zatwierdzając ponownie klawiszem [Enter] (rys. 12.).
Rys. 12. Wprowadzanie komentarza cewki wyjściowej.
3.
W programie drabinkowym wyświetlony zostanie styk reprezentujący wyjście na
diodę LED opisaną jako „Laser”, której zapalenie odpowiada wykryciu przedmiotu
przez czujnik światłowodowy OMRON E3Z-LL83.
5.1.4
Wprowadzenie pozostałych styków i cewek
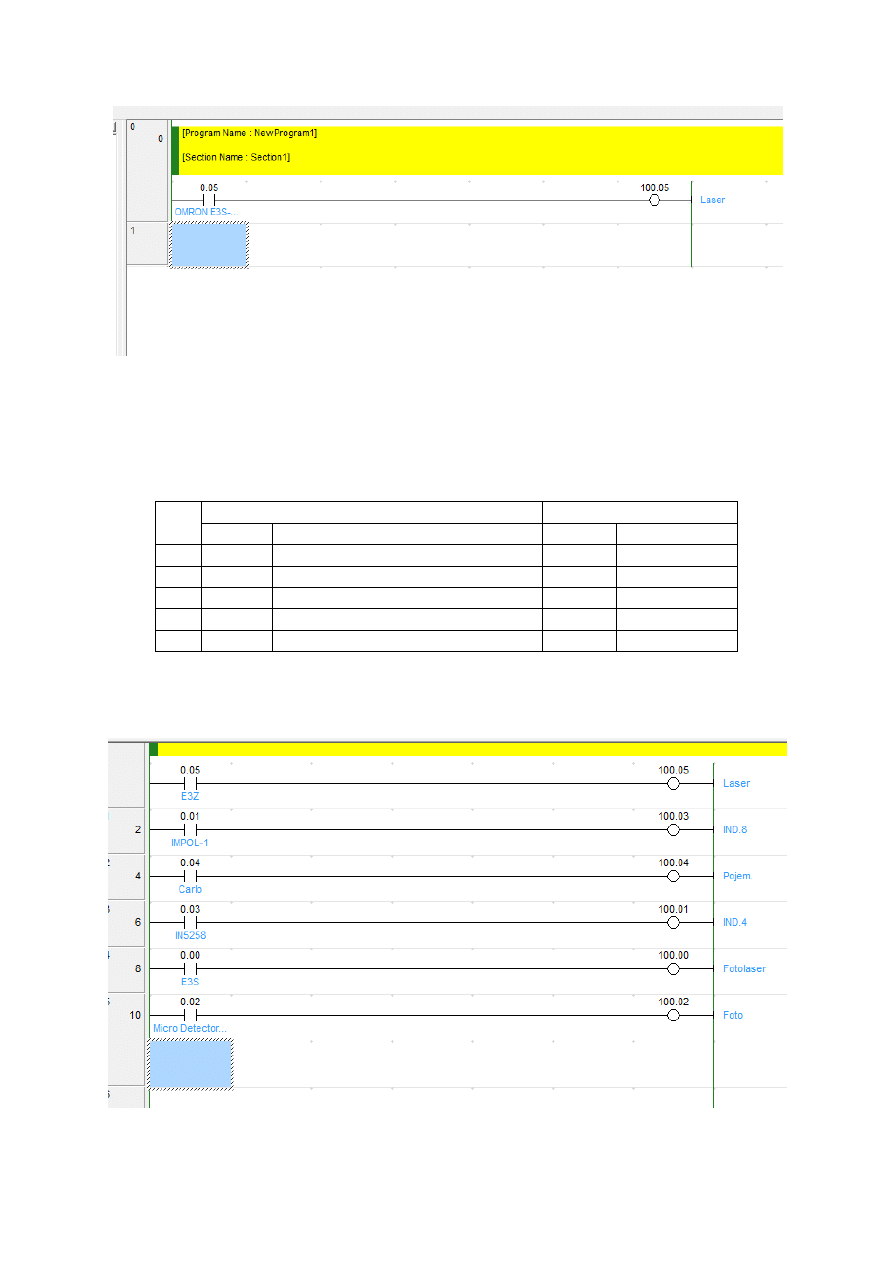
1.
Naciśnij strzałkę „w dół”, aby przejść do kolejnej linii programu tak jak to zostało
przedstawione na rysunku 13.
14
Rys. 13. Kompletna pierwsza linia programu. Kursor znajduje się w drugiej linii.
2.
Wprowadź kolejno następne styki wejściowe oraz cewki wyjściowe zgodnie
z poniższą tabelą. Wprowadzanie styków i cewek opisano w podrozdziałach 4.1.2 oraz
4.1.3 niniejszej instrukcji.
Lp.
Styki wejściowe
Cewki wyjściowy
Adres
Komentarz
Adres
Komentarz
1
0.01
IMPOL-1 ICZ D8 CN PNP A1
100.03
IND.8
2
0.04
Carlo Gavazzi CA18CLN12PAM
100.04
Pojem.
3
0.03
IFM Electronic IN5258
100.01
IND.4
4
0.00
OMRON E3S-X3CB4
100.00
Fotolaser
5
0.02
Micro Detectors SSC/DP-0E
100.02
Foto
3.
Po wprowadzeniu wszystkich styków i odpowiadających im cewek nasz program
drabinkowy powinien wyglądać następująco:
Rys. 14. Kompletny nieuruchomiony program drabinkowy.
15
4.
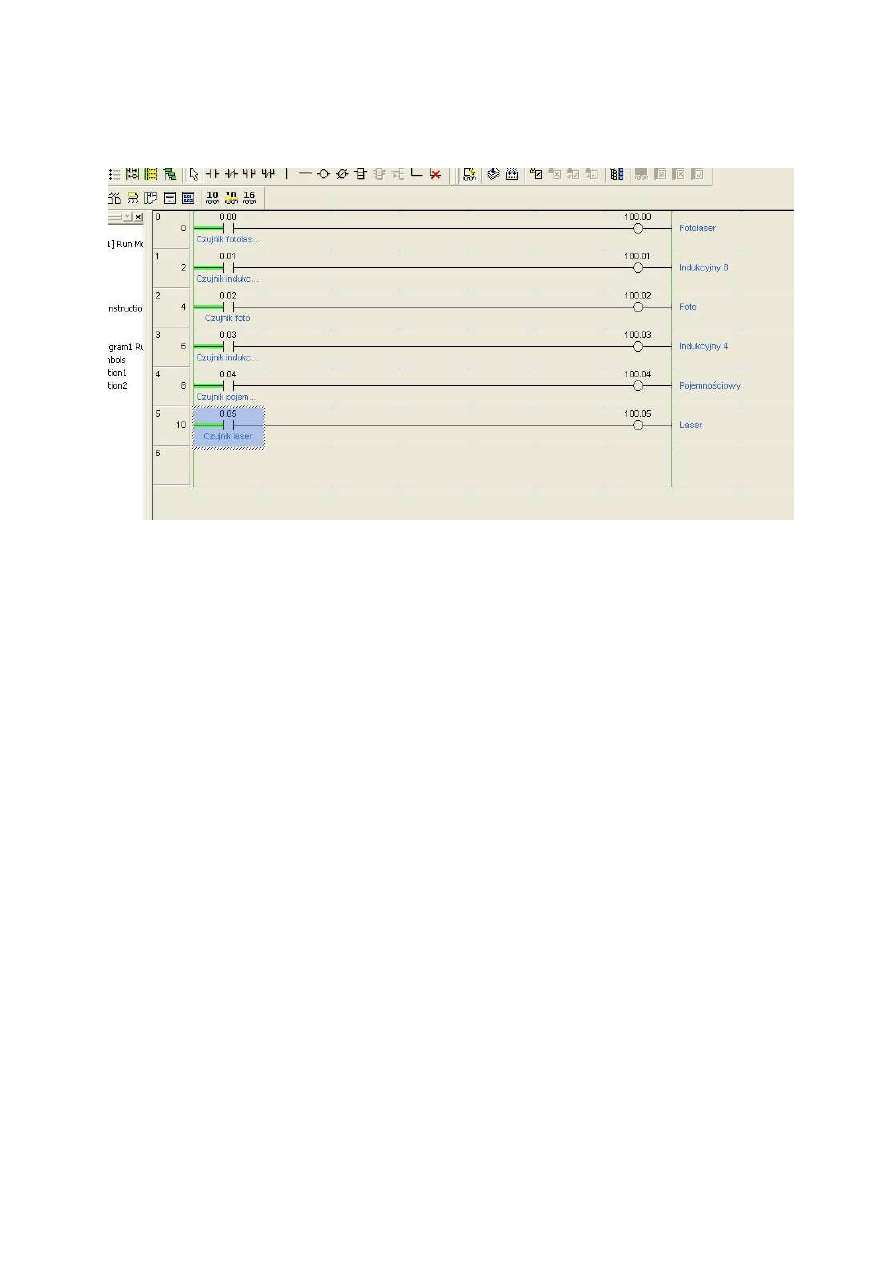
Zapisz i skompiluj program.
5.
Przejdź w tryb pracy Online (rys. 15).
Rys. 15. Program drabinkowy w trybie pracy online.
5.2
Badanie właściwości czujników
Wykorzystując stanowisko do badania właściwości czujników, wykonać pomiary
minimalnego oraz maksymalnego zasięgu działania poszczególnych czujników. Pomiary
wykonać dla wszystkich próbek.
Zbadać maksymalne kąty wykrywania przez czujniki poszczególnych próbek.
6.
Wykonanie sprawozdania
6.1
Opracowanie wyników
1.
Porównać zakresy pracy i kąty z parametrami znamionowymi czujników.
2.
Wykonać charakterystyki porównawcze w zależności od czujnika i rodzaju materiału.
6.2
Pytania i zagadnienia
1.
Omówić środowisko CX-One firmy Omron.
2.
Opisać zasadę działania czujników indukcyjnych. Omówić ich wady i zalety.
3.
Zaprezentować przykłady zastosowań w przemyśle czujników wykorzystanych
w ćwiczeniu.
4.
Przedstawić zasadę działania czujników fotoelektrycznych.
5.
Porównać właściwości ciała doskonale czarnego i ciała białego.
6.
Dokładność pomiaru odległości metodami laserowymi.
7.
Przeanalizować dokładność pomiarową czujników wykorzystywanych w przemyśle
w zależności od temperatury pracy.
8.
Omówić budowę sterowników PLC.
9.
Współczynnik korekcji w czujnikach indukcyjnych.
10.
Przedstawić różnice między czujnikami PNP i NPN.

16
Literatura
[1]
BROEL-PLATER B., Układy wykorzystujące sterowniki PLC. Projektowanie
algorytmów sterowania, PWN, Warszawa 2008;
[2]
FLAGA S., Programowanie sterowników PLC w języku drabinkowym, BTC,
Legionowo 2010;
[3]
LEGIERSKI T., KASPRZYK J., WYRWAŁ J., HAJDA J., Programowanie
sterowników PLC, Wydawnictwo Pracowni Komputerowej Jacka Skalmierskiego,
Gliwice 1998;
[4]
SAŁAT R., KORPYSZ K., OBSTAWSKI P., Wstęp do programowania sterowników
PLC, WKŁ, Warszawa 2010;
[5]
SETA Z., Wprowadzenie do zagadnień sterowania. Wykorzystanie programowalnych
sterowników logicznych, MIKOM, Warszawa 2002;
[6]
W393-E1-13 – Sysmac CJ Series Programmable Controllers. Operational Manual,
OMRON 2008;
[7]
W340-E1-15 – Programmable Controllers. Instructions Reference Manual, OMRON
2008;
[8]
R135-E1-02 – CX-ONE – Introduction Guide, OMRON 2008;
[9]
R132-E1-04 – CX-Programmer – Introduction Guide, OMRON 2008;
[10]
W437-E1-01 – CX-Programmer Ver. 5.0. Operational Manual, OMRON 2004
Wyszukiwarka
Podobne podstrony:
Skrypt - Obsługa przyrządów pomiarowych z wykorzystaniem standardu SCPI, Nauka i Technika, Automatyk
Obsługa aparatury pomiarowej z wykorzystaniem SCPI oraz środowiska VEE PRO, Nauka i Technika, Automa
etzi-zagadnienia do zaliczenia-2016, ELEKTRONIKA I TELEKOMUNIKACJA PRZ - systemy pomiarowe i diagnos
Program Laboratorium Komputerowe systemy pomiarowe Gawędzki KSP
Program Laboratorium Komputerowe systemy pomiarowe Gawędzki KSP
2 Komputerowy system pomiaru nieparzystości odchyłek okroglosci
ANALIZA KOMPUTEROWA SYSTEMÓW POMIAROWYCH — MSE
etzi-zagadnienia do zaliczenia-2016, ELEKTRONIKA I TELEKOMUNIKACJA PRZ - systemy pomiarowe i diagnos
Program Laboratorium Komputerowe systemy pomiarowe Gawędzki KSP
Komputerowy system wspomagania diagnostyki i terapii logopedycznej oferowany przez Gabinet „Demosten
Komputerowy system pomiaru nieparzystych odchyłek okrągłości
KOMPUTEROWE SYSTEMY STEROWANIA Nieznany
szablon ćw.6, PWSZ Nowy Sącz, II semestr, METROLOGIA I SYSTEMY POMIAROWE, Metrologia
Labolatorium projektowania układów i systemów sterowania, Narzędzia komputerowego wspomagania projek
Komputerowy system rejestracji?nych pomiarowych PC Link Plus
więcej podobnych podstron