Janusz KOWAL
Janusz KOWAL
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza
Hutnicza
Podstawy Automatyki
Wykład 8
Ocena jakości liniowych
układów regulacji
Wykład 8
Wykład 8
Ocena jakości liniowych
Ocena jakości liniowych
układów regulacji
układów regulacji
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
2
y(t)
w(t)
e(t)
−
=
Podstawowym wymaganiem stawianym układowi
regulacji jest uzyskanie na jego wyjściu sygnału
y(t) odpowiednio bliskiego przebiegowi wartości
zadanej w(t) (czyli minimalizacji sygnału uchybu).
Uchyb regulacji e(t) jest różnicą pomiędzy
wartością zadaną a regulowaną, może być
wywołany przez np:
9
zakłócenia
9
zmianą parametrów układu
9
zmianę wartości zadanej
Wprowadzenie
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
3
9
Dokładność statyczna
– zdolność układu do
utrzymywania wartości regulowanej jak najbliżej
wartości zadanej w stanie ustalonym, a więc po
zakończeniu stanu przejściowego.
9
Dokładność dynamiczna
– określa zdolność
układu do wiernego i szybkiego śledzenia zmiany
wartości zadanej.
Wprowadzenie
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
4
W przebiegu uchybu regulacji e(t) można wydzielić
dwie składowe:
(t)
e
e
e(t)
d
u
+
=
2)
Uchyb dynamiczny e
d
(t )
występuje w stanie
przejściowym
1)
Uchyb ustalony e
u
występuje wtedy, gdy w
układzie dla t
→ ∞
przy danym sygnale
sterującym i danych sygnałach zakłócających
sygnał wyjściowy ustala się. Przy wymuszeniu
skokowym uchyb ustalony nosi nazwę uchybu
statycznego.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
5
Dokładność statyczna liniowych układów
regulacji
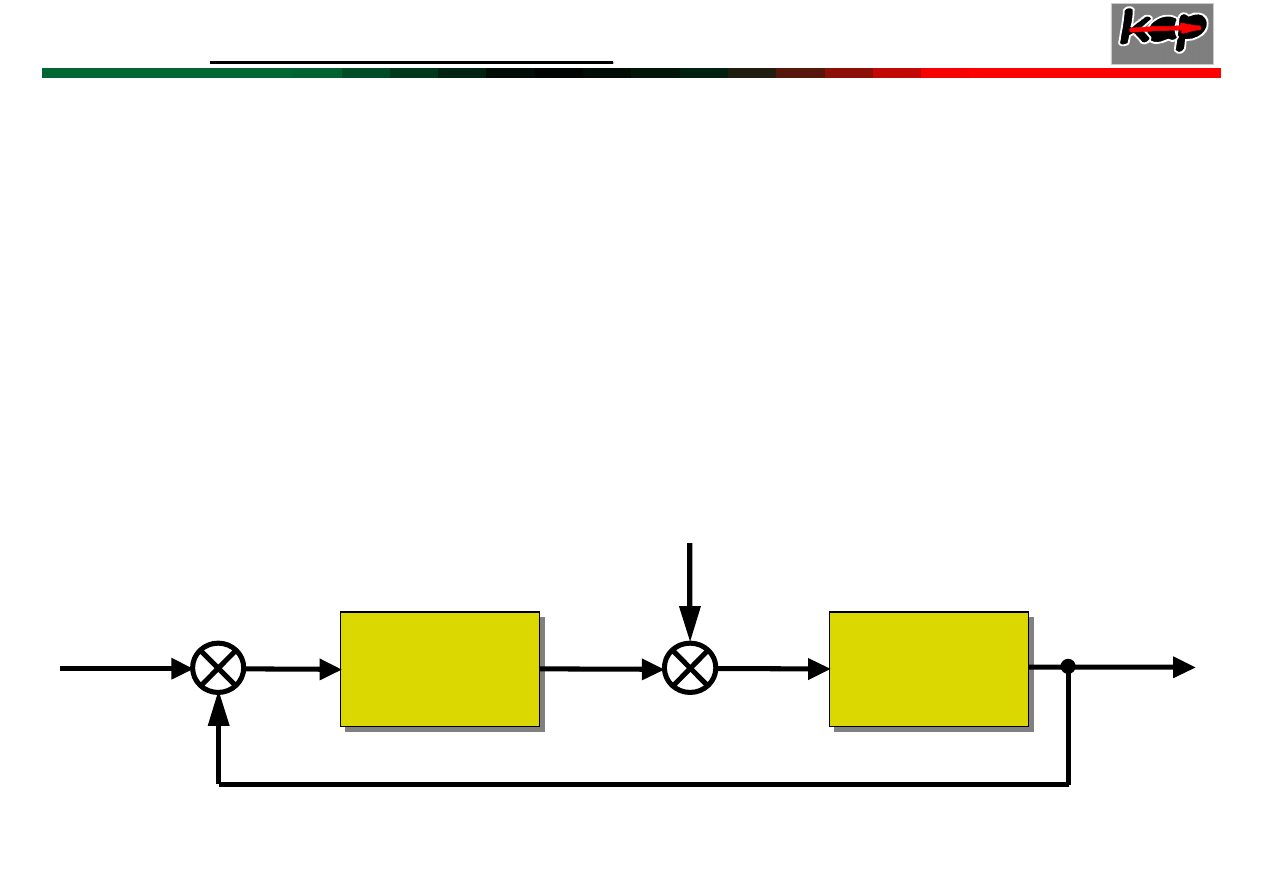
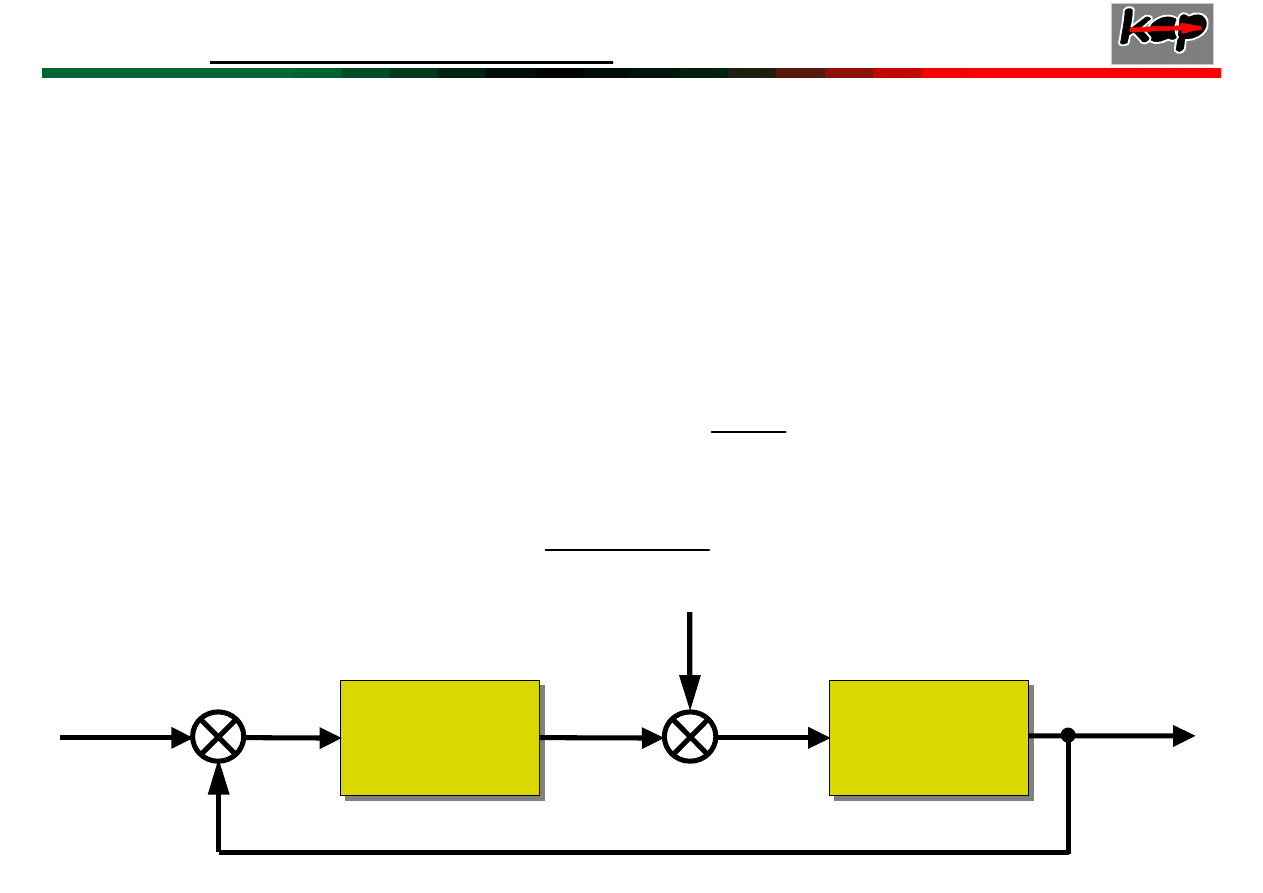
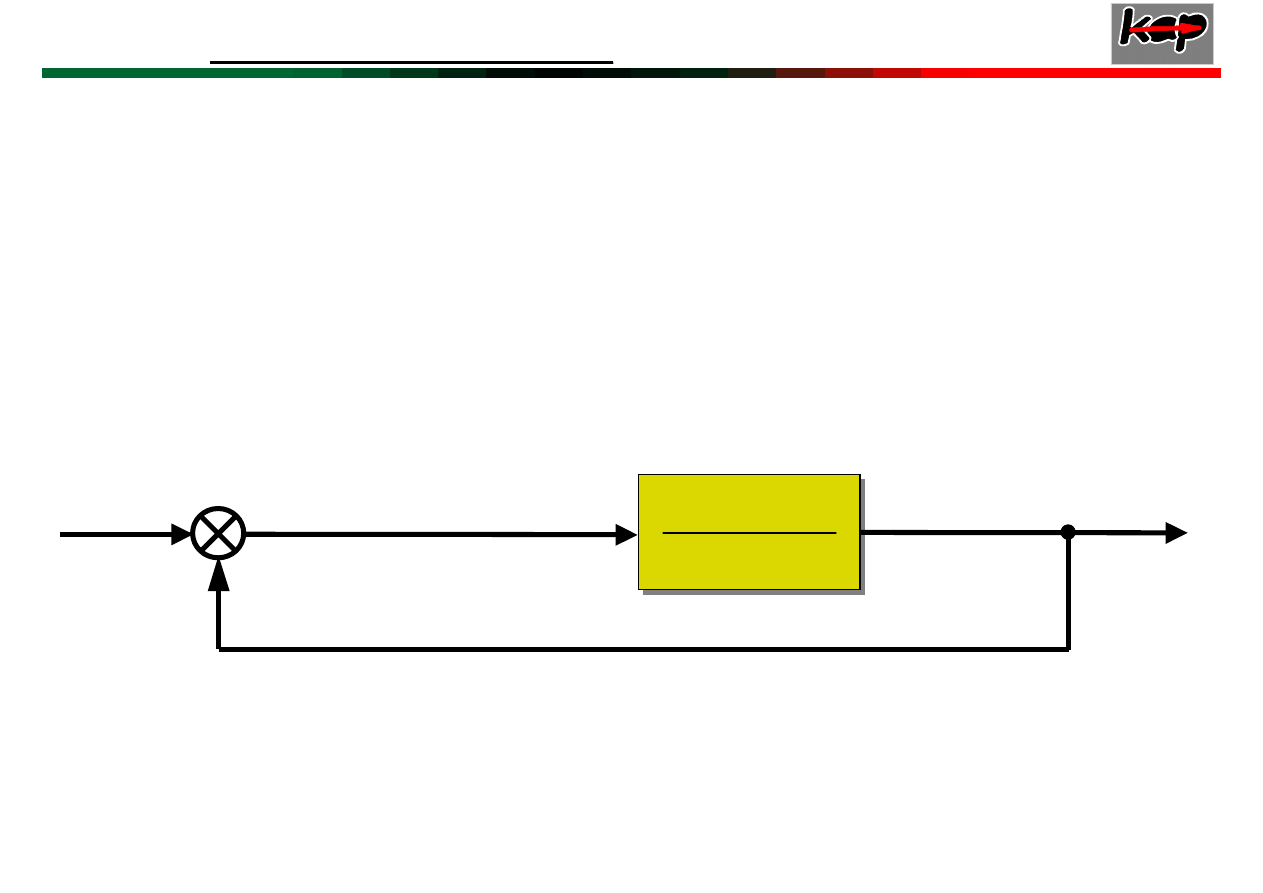
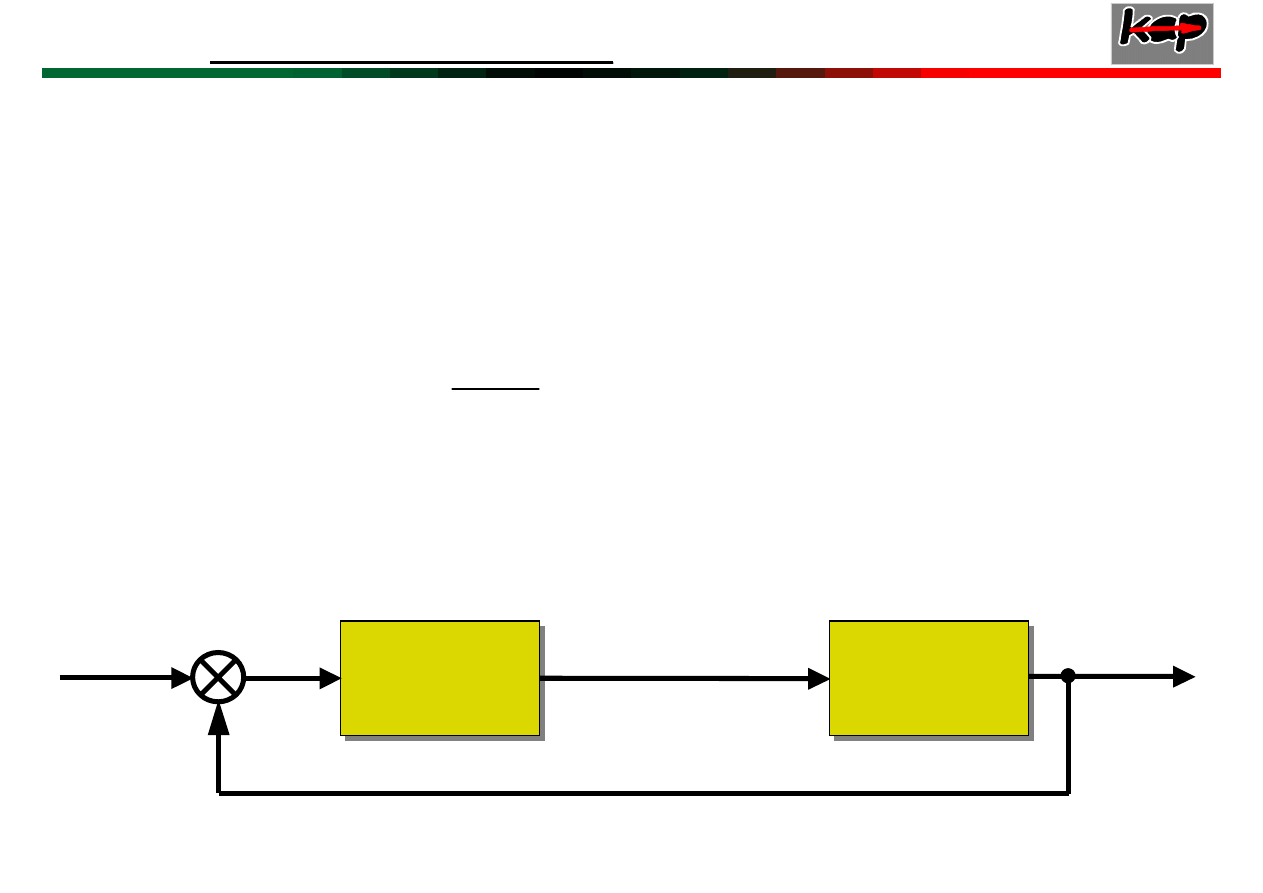
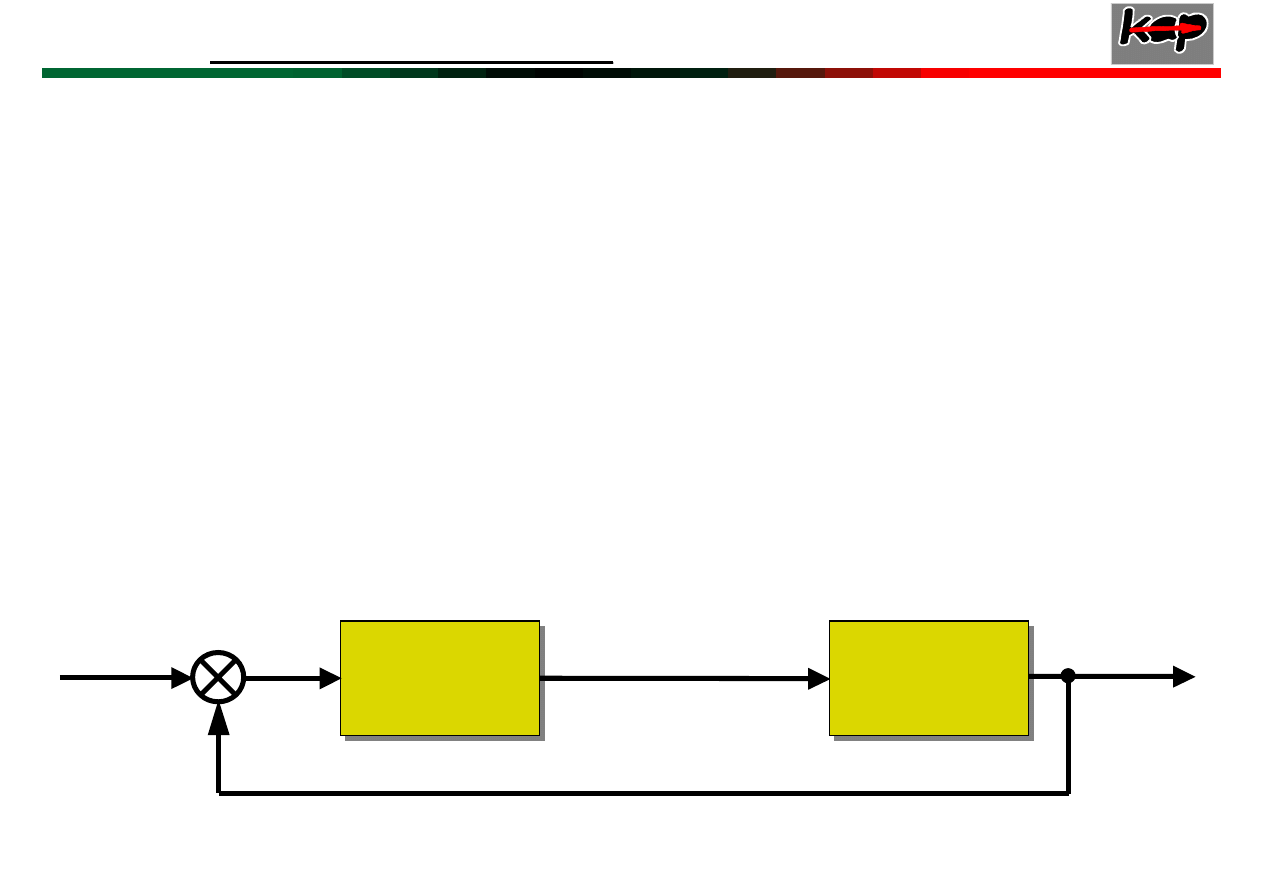
Schemat blokowy układu regulacji
9
uchyby ustalone
– utrzymujące się po zaniku
procesu przejściowego, wywołanego zmianą
wartości zadanej w(t) lub zakłócenia z(t)
Miarą dokładności statycznej są:
)
s
(
G
R
Y(s)
)
s
(
G
O
–
W(s)
–
E(s)
Z(s)
U(s)
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
6
e(t)
e
t
u
∞
→
= lim
(t)
e
(t)
e
e(t)
w
z
+
=
Ocena dokładności statycznej
układu spro-
wadza się do oceny uchybu w stanie ustalonym e
u
.
Uchyb regulacji e(t) można wyrazić także jako
sumę dwóch składowych
gdzie:
e
w
(t) –
składowa wywołana zmianą wartości zadanej na
wejściu układu (uchyb nadążania).
e
z
(t) –
składowa będąca wynikiem oddziaływania
zakłóceń (uchyb zakłóceniowy),
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
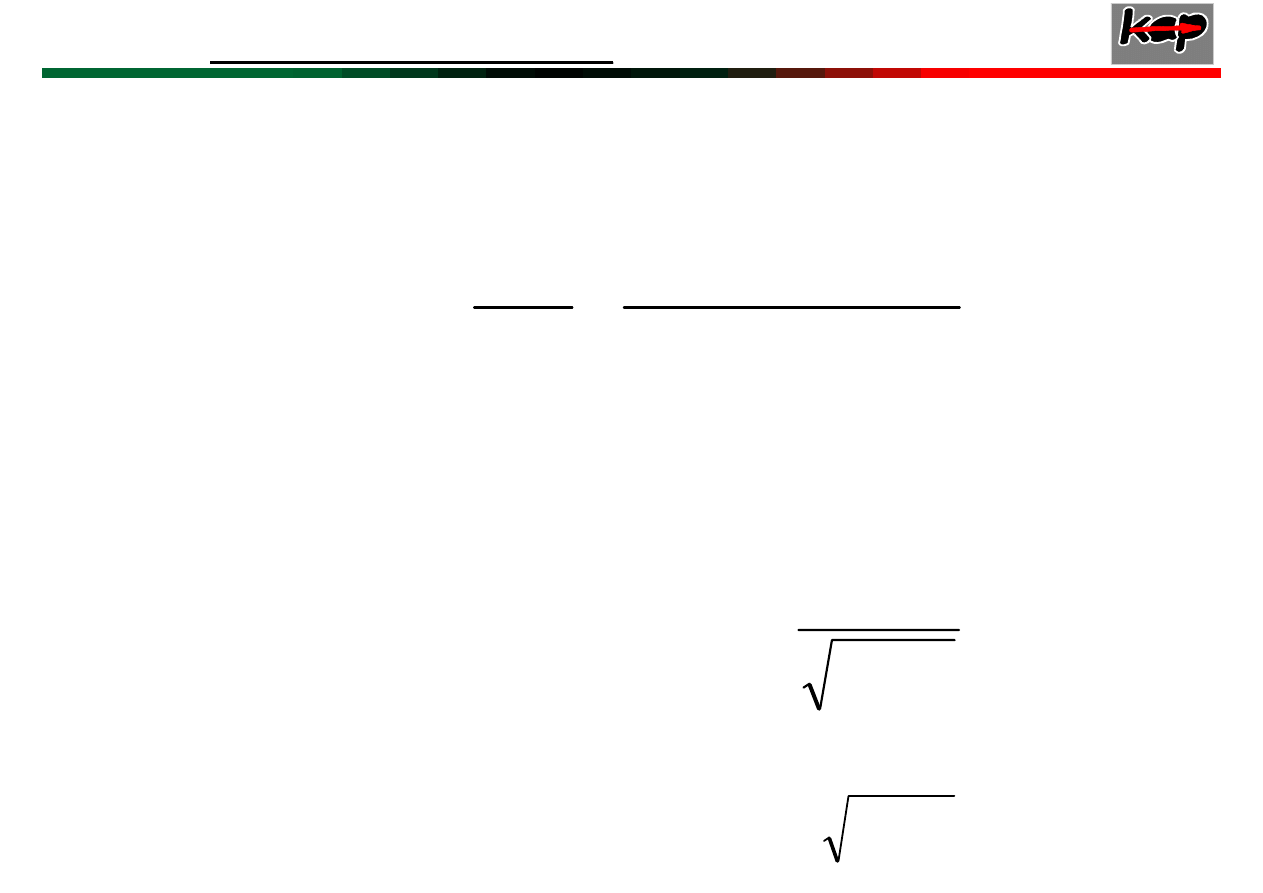
7
)
(
)
(
1
)
(
)
(
0
0
1
s
G
s
G
s
G
s
G
W(s)
(s)
Y
(s)
G
R
R
W
+
=
=
)
(
)
(
)
(
0
s
E
s
G
s
G
(s)
Y
w
R
w
=
)
(
)
(
1
1
)
(
0
s
G
s
G
W(s)
(s)
E
s
G
R
W
e/w
+
=
=
Transmitancja uchybowa
układu względem
wartości zadanej w(t) wynosi więc:
lecz
1) Zakładamy, że z(t)
≡
0 wtedy:
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
8
)
(
)
(
1
)
(
)
(
0
0
2
s
G
s
G
s
G
Z(s)
(s)
Y
s
G
R
Z
+
−
=
=
(s)
E
s
G
(s)
Y
Z
Z
)
(
1
0
−
=
)
(
)
(
1
)
(
)
(
0
0
s
G
s
G
s
G
Z(s)
(s)
E
s
G
R
z
e/z
+
=
=
stąd transmitancja uchybu względem zakłócenia
z(t) wynosi:
lecz
2) Zakładamy, że w(t)
≡
0, wtedy
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
9
Z(s)
s
G
s
G
s
G
W(s)
s
G
s
G
s
G
s
G
(s)
Y
(s)
Y
Y(s)
R
R
R
Z
W
)
(
)
(
1
)
(
)
(
)
(
1
)
(
)
(
0
0
0
0
+
−
+
=
+
=
Z(s)
s
G
s
G
s
G
W(s)
s
G
s
G
(s)
E
(s)
E
E(s)
R
R
Z
W
)
(
)
(
1
)
(
)
(
)
(
1
1
0
0
0
+
+
+
=
+
=
sE(s)
e(t)
e
s
t
u
0
lim
lim
→
∞
→
=
=
Powyższe zależności pozwalają ocenić wpływ typu i
nastaw regulatora na dokładność statyczną układu.
stąd uchyb statyczny (twierdzenie o wartości
końcowej)
Odpowiedź całkowita uchybu
Odpowiedź całkowita wielkości regulowanej
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
10
1
)
(
0
+
=
Ts
K
s
G
Z(s)
s
G
s
G
s
G
s
sE(s)
e
R
s
s
u
)
(
)
(
1
)
(
lim
lim
0
0
0
0
+
=
=
→
→
Ponieważ w(t) = 0 otrzymujemy:
b) regulator typu PI
a) regulator typu P
Wyznaczyć uchyb statyczny układu wywołany
skokową zmianą zakłócenia w przypadku, gdy w
układzie zastosowano:
Obiekt regulacji jest elementem inercyjnym
pierwszego rzędu.
Przykład 1
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
11
st
p
st
p
s
u
z
KK
K
s
z
K
Ts
K
Ts
K
s
e
+
=
+
+
+
=
→
1
1
1
1
lim
0
s
z
)
s
T
(
K
Ts
K
Ts
K
s
e
st
i
p
s
u
1
1
1
1
1
lim
0
+
+
+
+
=
→
0
)
1
(
)
1
(
lim
0
=
+
+
+
=
→
st
i
p
i
i
s
u
z
s
T
KK
Ts
s
T
s
KT
e
a) Jeżeli G
R
(s) = K
p
, to
b) Jeżeli , to
+
=
s
T
K
)
s
(
G
i
p
r
1
1
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
12
9
Należy zwrócić uwagę, że zmniejszenie uchybu
statycznego na drodze zwiększenia
współczynnika wzmocnienia K
p
regulatora jest
możliwe w ograniczonym zakresie – może
bowiem prowadzić do niestabilności układu.
b)działanie całkujące regulatora powoduje, że
uchyb statyczny e
u
= 0.
a)zwiększenie wzmocnienia K
p
, regulatora typu P,
powoduje zmniejszenie uchybu statycznego,
Z powyższych obliczeń wynika, że:
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
13
M(s)
L(s)
(s)
G
otw
=
Transmitancja układu otwartego G
otw
(s)
dla
układów statycznych nie zawiera biegunów
zerowych
Układy, w których występują uchyby ustalone,
proporcjonalne do wartości wymuszenia
skokowego.
1) Układy regulacji statycznej
Istnieją dwa typy liniowych układów regulacji:
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
14
M(s)
s
L(s)
(s)
G
n
otw
=
Transmitancja układu otwartego dla układów
astatycznych ma postać:
Układy, w których uchyby ustalone przy stałym
wymuszeniu są równe zero. Układy astatyczne,
wykazują pewne uchyby ustalone przy
wymuszeniach liniowo narastających.
2) Układy regulacji astatycznej
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
15
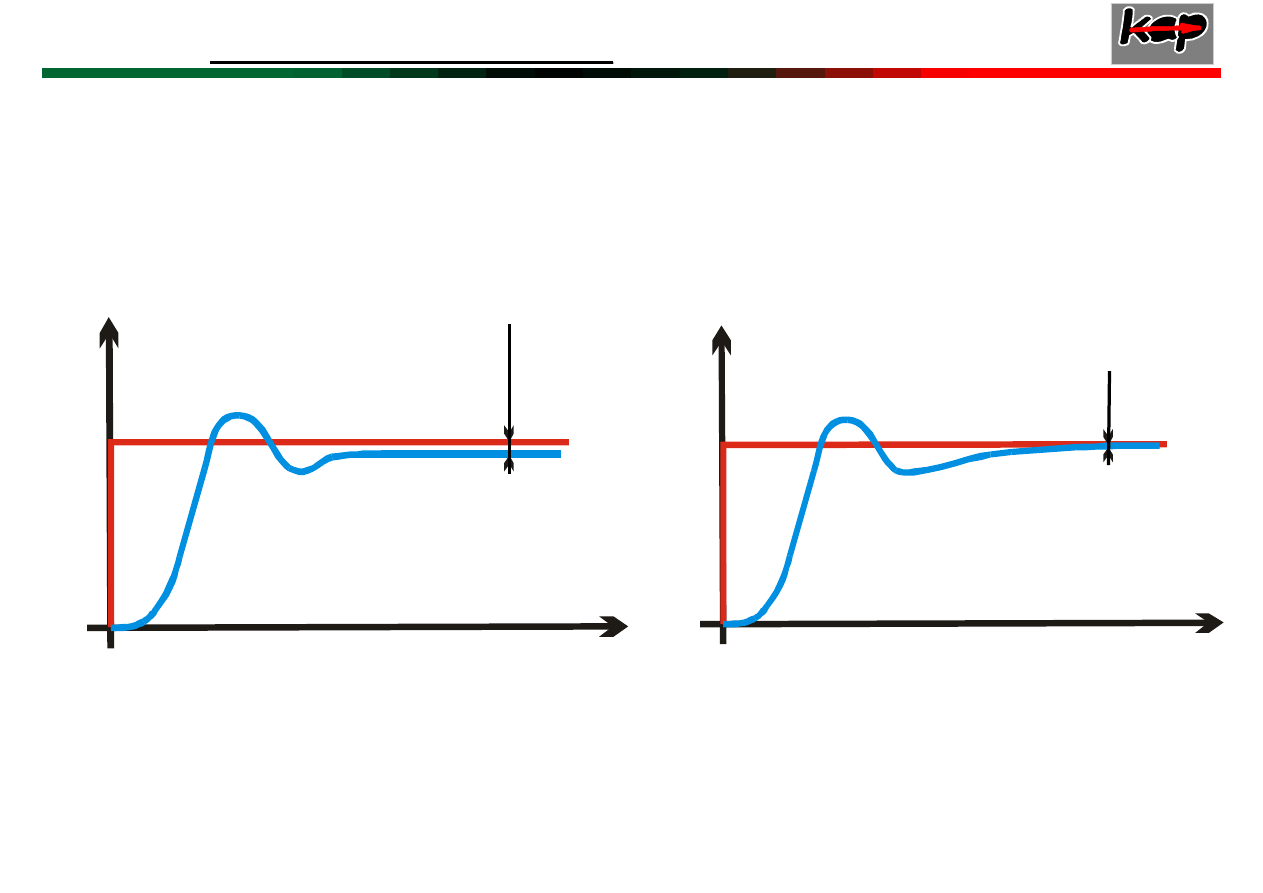
w y
t
Odpowiedzi układu statycznego
Na wymuszenie skokowe
Na wymuszenie liniowo
narastające
w(t)
y(t)
a)
e
=c
on
st
u
w y
t
w(t)
y(t)
b)
e
=0
u
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
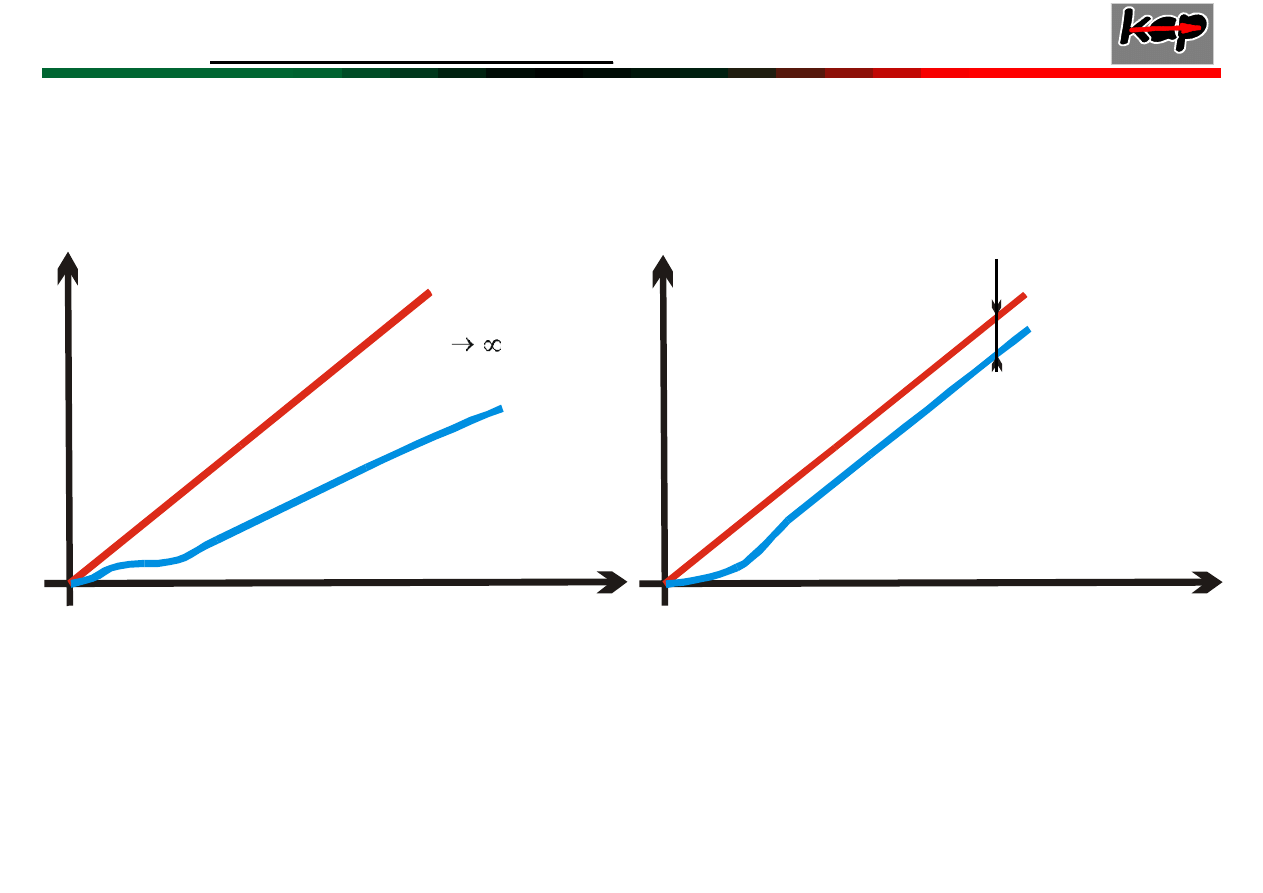
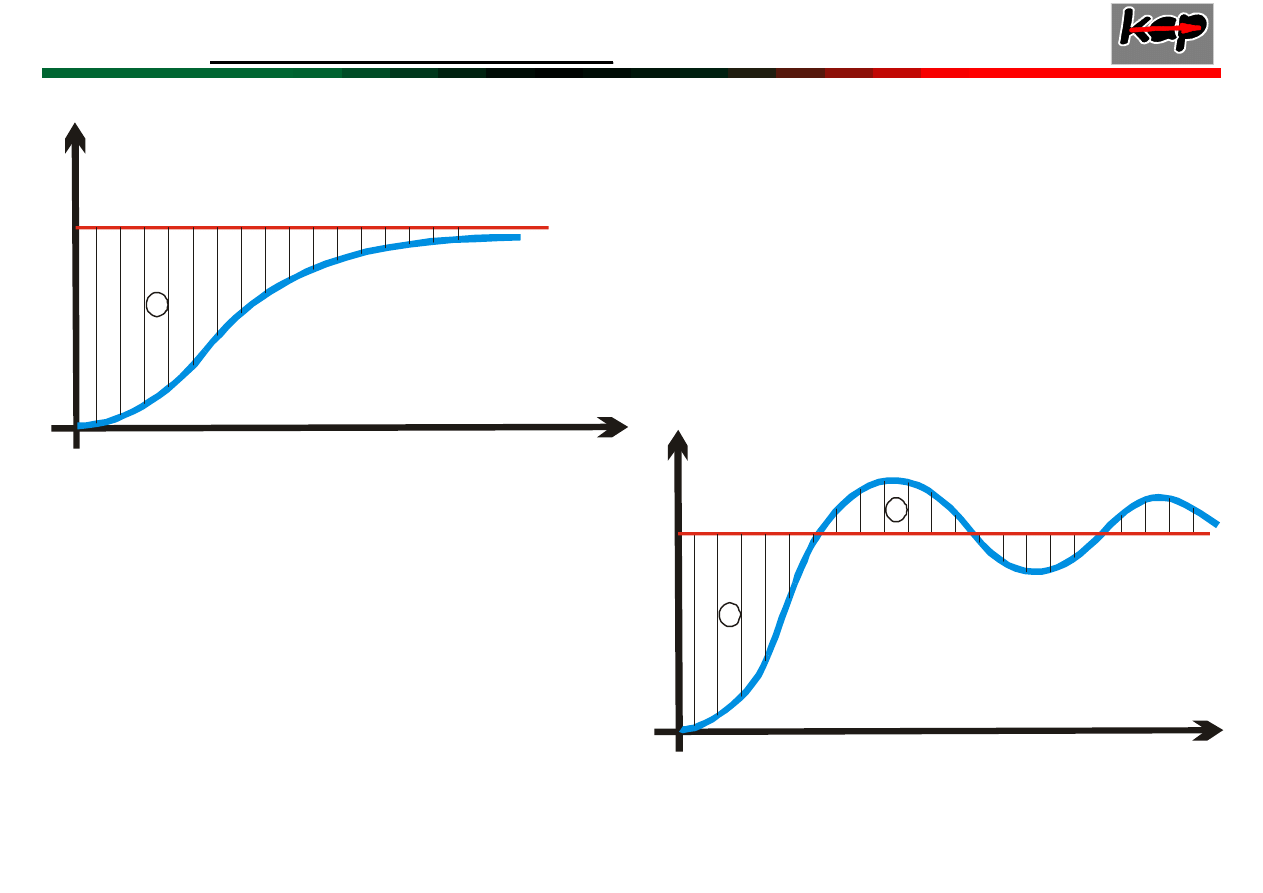
16
Odpowiedzi układu astatycznego I rzędu
Na wymuszenie skokowe
Na wymuszenie liniowo
narastające
w y
t
w(t)
y(t)
∞
→
e
u
w y
t
w(t)
y(t)
e =const
u
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
17
( )
( )
(
)
2
1
,
1
1
+
=
+
=
s
s
s
G
sT
K
s
G
O
i
p
R
Układ regulacji automatycznej ma strukturę
przedstawioną na rysunku. Regulator i obiekt mają
transmitacje operatorowe odpowiednio równe:
Przykład 2
R
Y(s)
O
–
W(s)
–
E(s)
Z(s)
U(s)
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
18
[
]
+
=
=
=
→
→
→
)
(
)
(
)
(
1
1
lim
)
(
)
(
lim
)
(
lim
0
0
0
s
W
s
G
s
G
s
s
W
s
sG
s
sE
e
O
R
s
w
e
s
s
u
[
]
)
s
(
W
)
s
(
M
)
s
(
sM
lim
)
(
L
)
(
L
)
(
M
)
(
M
)
s
(
W
)
s
(
L
)
s
(
L
)
s
(
M
)
s
(
M
)
s
(
M
)
s
(
M
s
lim
e
O
R
s
O
R
O
R
O
R
O
R
O
R
s
u
0
0
0
0
0
0
1
→
→
+
=
=
+
=
Przy założeniu, że Z(s) = 0 dla wymuszeń
nieokresowych otrzymamy
Wyznaczyć uchyb ustalony w odpowiedzi na
wymuszenie skokowe i liniowo narastające.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
19
2
2
1
)
(
s
s
W
=
( )
i
R
sT
s
M
=
(
)
0
2
1
lim
1
0
0
1
0
=
+
⋅
+
⋅
=
→
s
s
sT
s
s
k
e
i
s
p
u
Uchyb ustalony (statyczny) przy wymuszeniu
skokowym będzie równy zeru:
Mianownik transmitancji operatorowej regulatora
PI ma postać:
Dla wymuszenia liniowego (prędkościowego)
w
2
(t)=a
2
t1(t) o amplitudzie a
2
=1 otrzymamy
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
20
(
)
0
2
1
lim
1
2
0
=
+
=
→
s
s
sT
s
s
k
e
i
s
p
u
)
(
1
)
(
2
3
3
t
t
a
t
w
⋅
=
3
3
1
)
(
s
s
W
=
i wtedy powstanie niezerowy uchyb ustalony
Dopiero wymuszenie drugiego rzędu,
przyspieszeniowe (paraboliczne) o amplitudzie
a
3
=1 daje
Przy wymuszeniu liniowo narastającym uchyb
ustalony będzie również znikał ze względu na
całkujący charakter obiektu:
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
21
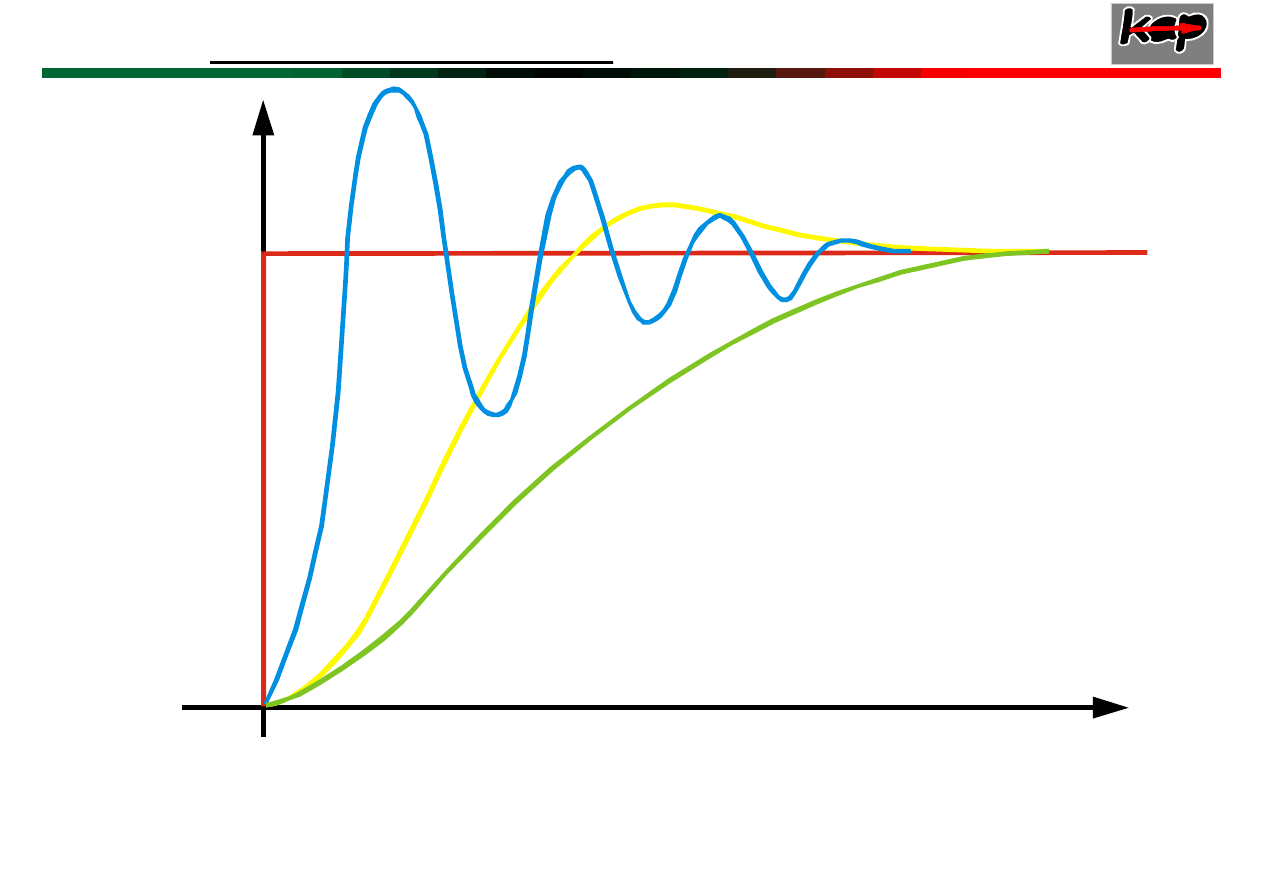
Zatem wzrost wzmocnienia regulatora w
konsekwencji zmniejsza dokładność dynamiczną
układu.
9
powoduje, że przebieg sygnału wyjściowego
coraz bardziej odbiega od przebiegu wartości
zadanej.
9
zmniejsza wartość uchybu ustalonego
Z odpowiedzi układu z regulatorem
proporcjonalnym na skokową zmianę wartości
zadanej widać, że wzrost wzmocnienia regulatora:
Jakość dynamiczna
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
22
h(t)
t
Odpowiedź skokowa dla różnych wzmocnień
regulatora
1
0
3
2
1
K <K <K
1
2
3
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
23
9
rozkład pierwiastków.
9
kryteria częstotliwościowe,
9
kryteria całkowe,
9
ocena parametrów odpowiedzi skokowej,
Ocena dokładności dynamicznej nie jest
jednoznaczna. O ile bowiem uchyb ustalony łatwo
zdefiniować i wyznaczyć jego wartość, o tyle
dokładność dynamiczną można scharakteryzować
różnymi parametrami, na podstawie różnych
kryteriów. Kryteria te można podzielić na cztery
grupy:
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
24
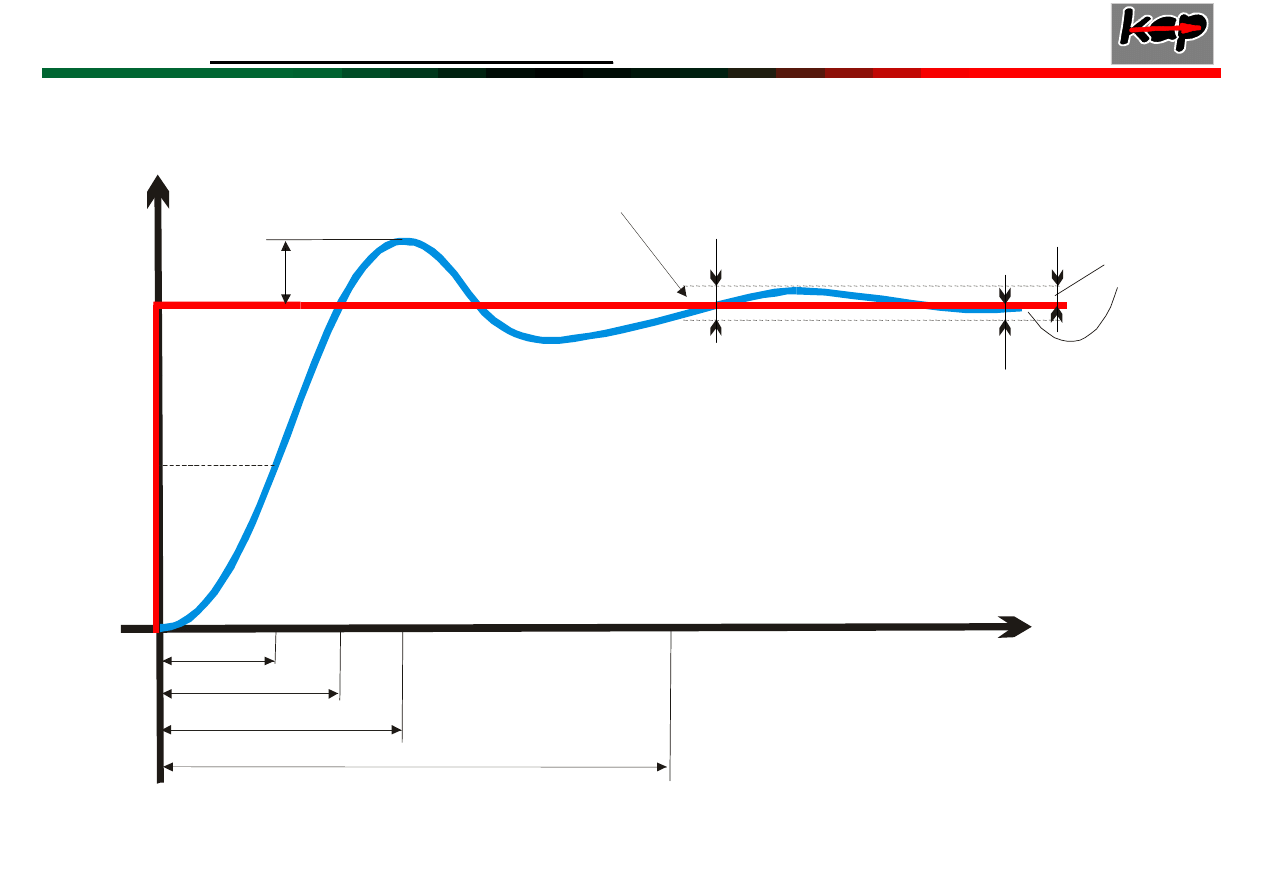
9
e) czas regulacji t
r
.
9
d) maksymalne przeregulowanie A
1
,
9
c) czas szczytowy t
m
,
9
b) czas narastania (czas wzrostu) t
1
,
9
a) czas t
d
,
Odpowiedź skokowa rzeczywistego układu
sterowania często daje tłumione oscylacje, zanim
osiągnie stan ustalony. Jakość regulacji określa
się w tym przypadku na podstawie następujących
parametrów:
Ocena parametrów odpowiedzi skokowej
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
25
y(t)
t
1
0
t
d
t
1
0.5
t
m
t
r
A
1
dopuszczalna
tolerancja
0.05
lub
0.02
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
26
9
Dla większości układów drugiego rzędu tłumienie
powinno zawierać się między 0.4 a 0.8,
9
Małe wartości
ξ
(
ξ
< 0.4) dają nadmierne
przeregulowanie w odpowiedzi skokowej, a
układy o dużej wartości
ξ
(
ξ
> 0.8) odpowiadają
powoli,
9
Niektóre parametry, np. maksymalne
przeregulowanie i czas narastania, są prze-
ciwstawne, tzn. maksymalne przeregulowanie
i czas narastania nie mogą być zmniejszane
równocześnie.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
27
Schemat blokowy układu II-go rzędu
Wyznaczyć czas narastania, czas szczytowy,
maksymalne przeregulowanie i czas regulacji
układu drugiego rzędu przedstawionego na
rysunku
.
.
Przykład 3
)
s
(
s
n
n
ξω
+
ω
2
2
Y(s)
–
W(s)
E(s)
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
28
( )
( )
( )
2
2
2
2
n
n
n
Z
s
s
s
W
s
Y
s
G
ω
ξω
ω
+
+
=
=
( )
−
+
−
=
−
1
2
1
1
sin
1
cos
1
1
t
t
e
t
y
d
d
t
n
ω
ξ
ξ
ω
ξω
2
1
ξ
ω
ω
−
=
n
d
przy czym w
d
oznacza pulsację drgań własnych
tłumionych, wynoszącą .
Obliczając z równania odpowiedz skokową,
otrzymujemy czas narastania t
1
przyjmując y(t
1
) = 1,
czyli
a) czas narastania t
1
Wartości te określimy jako funkcję
ξ
i w
n
. Zakłada
się, że układ jest niedotłumiony (oscylacyjny). Wtedy
transmitancja układu zamkniętego ma postać
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
29
0
sin
1
cos
1
2
1
=
−
+
t
t
d
d
ω
ξ
ξ
ω
σ
ω
ξ
ξ
ω
d
d
t
−
=
−
−
=
2
1
1
tg
d
d
d
t
ω
β
π
σ
ω
ω
−
=
−
=
−1
1
tg
1
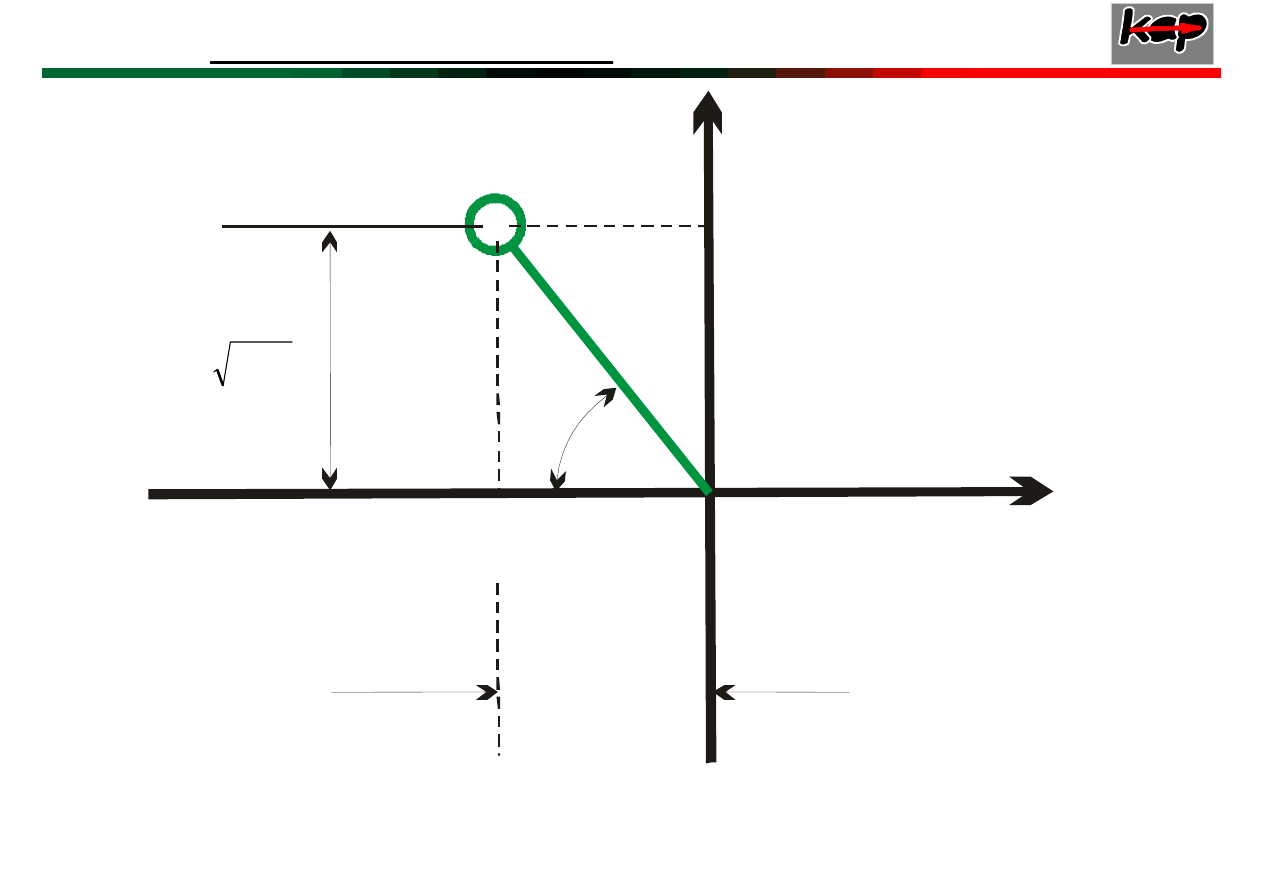
gdzie β jest zdefiniowane na rysunku. Oczywiście,
dla małych wartości t
1
, w
d
musi być duże.
stąd czas narastania t
1
jest równy:
czyli
Ponieważ z równania otrzymujemy równanie:
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
30
Definicja kąta β
σ
j
ω
−σ
β
j
ω
d
ω
n
0
ζω
n
2
ζ
1
ω
−
=
n
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
31
−
−
+
−
+
=
−
−
t
t
e
t
t
e
dt
dy
d
d
d
d
t
d
d
t
n
n
n
ω
ξ
ξω
ω
ω
ω
ξ
ξ
ω
ξω
ξω
ξω
cos
1
sin
sin
1
cos
2
2
(
)
0
1
sin
2
=
−
=
−
=
r
n
m
t
n
m
d
t
t
e
t
dt
dy
ξω
ξ
ω
ω
Człony zawierające cosinus w ostatnim równaniu
znoszą się i oszacowane w t = t
m
może być
uproszczone do
dt
dy
Czas szczytowy otrzymujemy różniczkując y(t) ze
względu na czas i przyrównując tę pochodną do
zera. Stąd
b) czas szczytowy t
m
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
32
0
sin
=
m
d
t
ω
,...
3
,
2
,
,
0
π
π
π
ω
=
m
d
t
d
m
t
ω
π
=
π
ω
=
m
d
t
Czas szczytowy t
m
odpowiada połowie okresu
drgań własnych tłumionych
Ponieważ czas szczytowy dotyczy pierwszego
przeregulowania, więc stąd :
czyli:
Z ostatniego równania otrzymujemy:
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
33
d
m
t
t
ω
π
=
=
( )
π
ξ
ξ
π
ω
σ
ω
π
ξω
π
ξ
ξ
π
2
1
2
1
sin
1
cos
1
−
−
−
−
=
=
−
+
=
−
=
e
e
e
t
y
A
d
d
n
m
%
e
d
100
⋅
−
π
ω
σ
Maksymalne procentowo przeregulowanie równe
jest
Stąd z równania otrzymujemy A
1
podstawiając
Maksymalne przeregulowanie występuje w czasie
szczytowym, czyli dla
c) maksymalne przeregulowanie A
1
:
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
34
( )
0
dla
1
tg
sin
1
1
2
1
2
≥
−
+
−
−
=
−
−
t
t
e
t
y
d
t
n
ξ
ξ
ω
ξ
ξω
Dla niedotłumionego
układu (oscylacyjnego)
drugiego rzędu odpowiedź skokowa ma postać:
d) czas regulacji t
r
:
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
35
t
y(t)
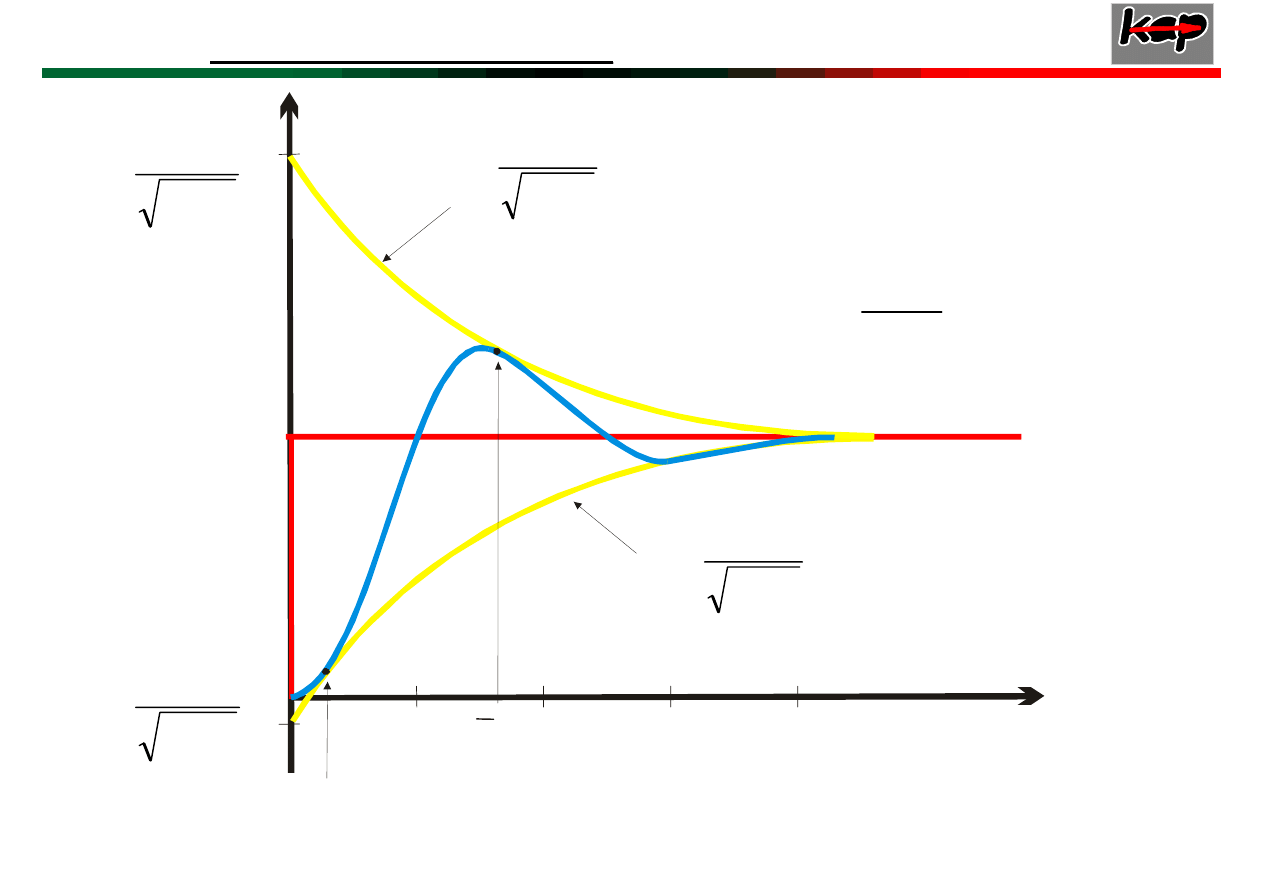
Para obwiedni odpowiedzi skokowej
0
1
T
2T
3T
4T
π
2
T
2
1
1
1
ζ
−
+
2
1
1
1
ζ
−
−
2
ζω
ζ
1
1
−
+
−
t
n
e
ζ
1
n
ω
=
T
2
ζω
ζ
1
1
−
−
−
t
n
e
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
36
9
Czas regulacji określany do chwili znalezienia się
sygnału wyjściowego w paśmie tolerancji o
szerokości
±
2% lub
±
5% może być mierzony
poprzez stałą czasową T = 1/
ξω
n
9
Prędkość tłumienia odpowiedzi skokowej zależy
od wartości stałej czasowej 1/
ξ
w
n
. Dla danego w
n
czas regulacji t
r
jest funkcją stosunku
ξ
.
9
Krzywa odpowiedzi y(t) zawsze pozostaje
wewnątrz pary obwiedni, jak to pokazano na
rysunku. Stała czasowa tych obwiedni równa jest
1/
ξ
w
n
.
9
Krzywe są obwiedniami odpowiedzi skokowej dla
jednostkowego skokowego sygnału wejściowego.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
37
n
r
T
t
ξω
σ
4
4
4
=
=
=
n
r
T
t
ξω
σ
3
3
3
=
=
=
(kryterium 5%)
lub
(kryterium 2%)
W praktyce do porównania odpowiedzi układów
powszechnie stosuje się czas regulacji
zdefiniowany jako:
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
38
( )
∫
∞
=
0
0
,
dt
t
e
I
d
( )
∫
∞
=
0
1
,
dt
t
e
I
d
( )
∫
∞
=
0
1
,
dt
t
e
t
I
d
k
k
( )
∫
∞
=
0
2
2
.
dt
t
e
I
d
Najczęściej stosowane kryteria całkowe:
Kryteria całkowe
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
39
( ) ( )
( )
t
e
lim
e
,
e
t
e
t
e
t
u
u
d
∞
→
=
−
=
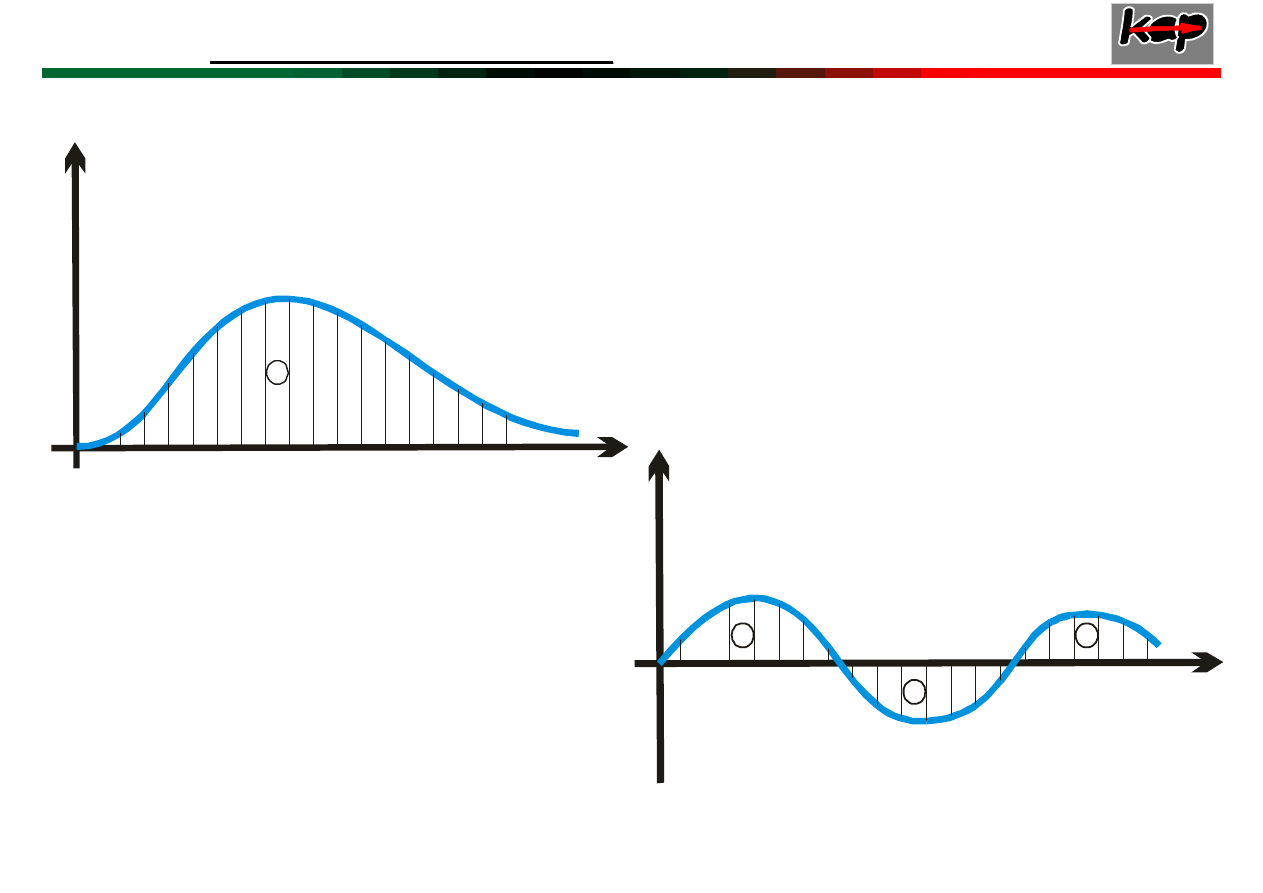
We wszystkich wymienionych kryteriach
(wskaźnikach) e
d
(t) oznacza uchyb przejściowy,
czyli:
9
Niekiedy stosowane są wskaźniki całkowe, w
których funkcja podcałkowa jest kombinacją
funkcji podcałkowych z powyższych kryteriów,
9
Za miarę jakości układu uważa się wartość
całki I, tzn. im mniejsza jest ta wartość, tym
wyższa jakość regulacji układu.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
40
t
+
e
d
0
y
t
-
+
+
0
Układ astatyczny
przebieg aperiodyczny
przebieg oscylacyjny
Interpretacja graficzna całkowych kryteriów jakości
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
41
t
-
+
0
t
e
d
+
0
e
u
Układ statyczny
przebieg aperiodyczny
przebieg oscylacyjny
Interpretacja graficzna całkowych kryteriów jakości
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
42
Schemat blokowy układu regulacji
K
s
G
Ts
s
G
R
=
+
=
)
(
;
1
1
)
(
0
Wyznaczyć uchyb ustalony i uchyb przejściowy.
Dany jest układ regulacji przy czym transmitacja
obiektu i regulatora ma postać
Przykład 4
R
Y(s)
O
–
W(s)
E(s)
U(s)
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
43
( )
)
(
)
(
1
1
0
s
G
s
G
s
G
R
w
e
+
=
( )
K
Ts
Ts
s
G
w
e
+
+
+
=
1
1
( )
( )
K
s
W
s
G
s
sE
t
e
t
e
w
e
s
s
t
u
+
=
=
=
=
→
→
∞
→
1
1
)
(
s
lim
)
(
lim
)
(
lim
0
0
stąd
Gdy sygnał wejściowy jest skokiem jednostkowym
w(t) = 1(t), transmitacja uchybowa układu ma postać
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
44
( )
( )
( )
(
)
K
Ts
s
Ts
s
E
s
G
s
s
E
w
e
+
+
+
=
=
1
1
1
( )
+
+
+
=
+
+
+
=
−
−
−
T
K
s
B
L
s
A
L
T
K
s
s
T
s
L
t
e
1
1
1
1
1
1
Chcąc wyliczyć uchyb przejściowy wyliczamy
transformatę uchybu
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
45
( )
( )
t
t
T
K
K
K
K
t
e
1
1
exp
1
1
1
⋅
+
−
+
+
+
=
( )
t
K
e
u
1
1
1
⋅
+
=
( )
( )
t
t
T
K
K
K
t
e
d
1
1
exp
1
⋅
+
−
+
=
a zatem
Przebieg ten nie jest funkcją podcałkową I
1
, gdyż
zawiera zarówno uchyb przejściowy, jak i uchyb
ustalony. Oddzielając przebieg ustalony
otrzymujemy uchyb przejściowy w postaci
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
46
( )
dt
t
e
I
d
∫
∞
=
0
2
2
(
)
(
)
∞
∞
+
−
+
−
=
+
−
+
=
∫
0
3
2
0
2
2
2
1
exp
1
2
1
2
exp
1
t
T
K
K
T
K
dt
t
T
K
K
K
I
(
)
3
2
2
1
2
K
T
K
I
+
=
stąd
Wyznaczmy teraz wartość całki z kwadratu
uchybu
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
47
( )
s
E
lim
I
p
s 0
0
→
=
9
Wartość całki np. I
o
możemy wyrazić też
następująco
9
Wartość kryterium całkowego I
2
jest w tym
przypadku zależna od dwóch parametrów K i T,
9
Osiągnie ona minimum gdy stała czasowa T
będzie jak najmniejsza, a współczynnik
wzmocnienia regulatora K będzie jak największy
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
48
9
Kryterium Nyquista
mówi,
że gdy
charakterystyka amplitudowo-fazowa stabilnego
układu otwartego nie obejmuje punktu (-1, j0), to
układ zamknięty jest też stabilny,
Podstawowym warunkiem dobrego działania
układu regulacji jest jego stabilność.
Kryteria częstotliwościowe
9
Odległość charakterystyki częstotliwościowej od
punktu krytycznego (-1, j0) jest miarą zapasu
stabilności.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
49
9
maksymalna wartość modułu M
p
transmitancji
widmowej zamkniętego.
9
pulsacja odcięcia w
n
charakterystyki widmowej
części rzeczywistej P(w) transmitancji układu
zamkniętego G
z
(jw), czyli pulsacja, przy której
charakterystyka rzeczywista przecina oś odciętych
9
zapas stabilności (modułu i fazy),
Zasadniczymi parametrami określanymi na
podstawie charakterystyk częstotliwościowych
układu są:
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
50
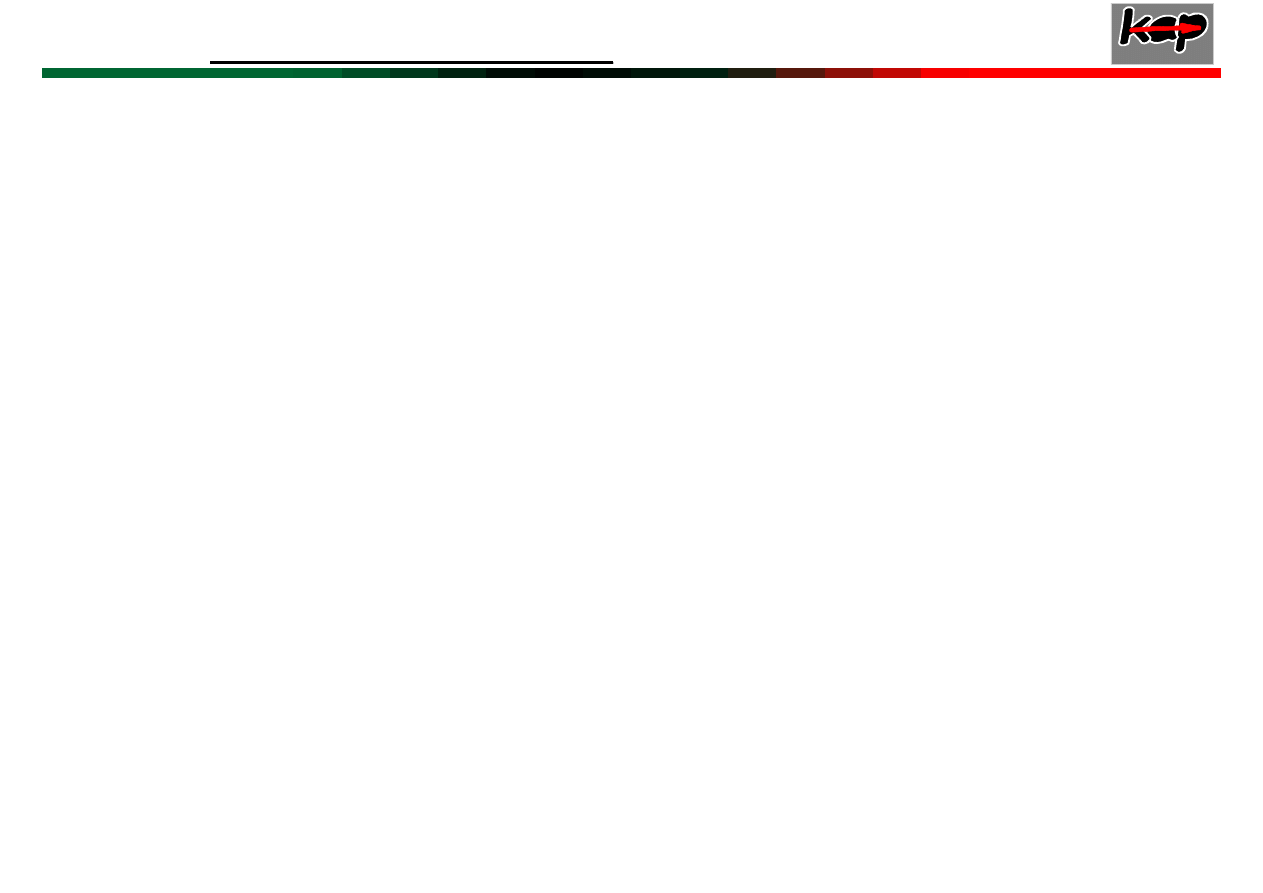
P
Q
Charakterystyka amplitudowo-fazowa;
zapas modułu wynosi 1/ 0,707
-1
-0.2
-0.4
-0.6
-0.8
-1.0
-1.2
-1.4
1
-0.2
-0.5
-0.707
ω=0
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
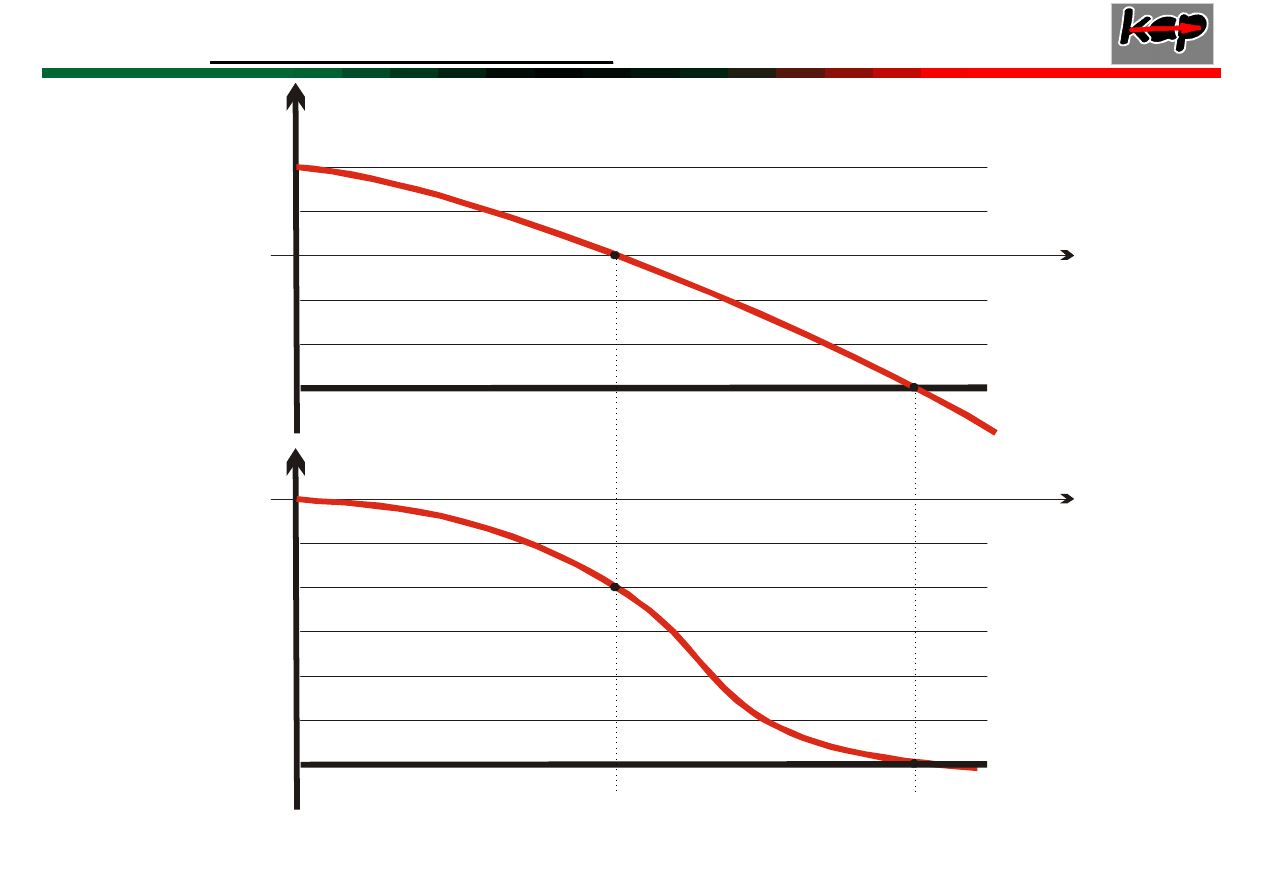
51
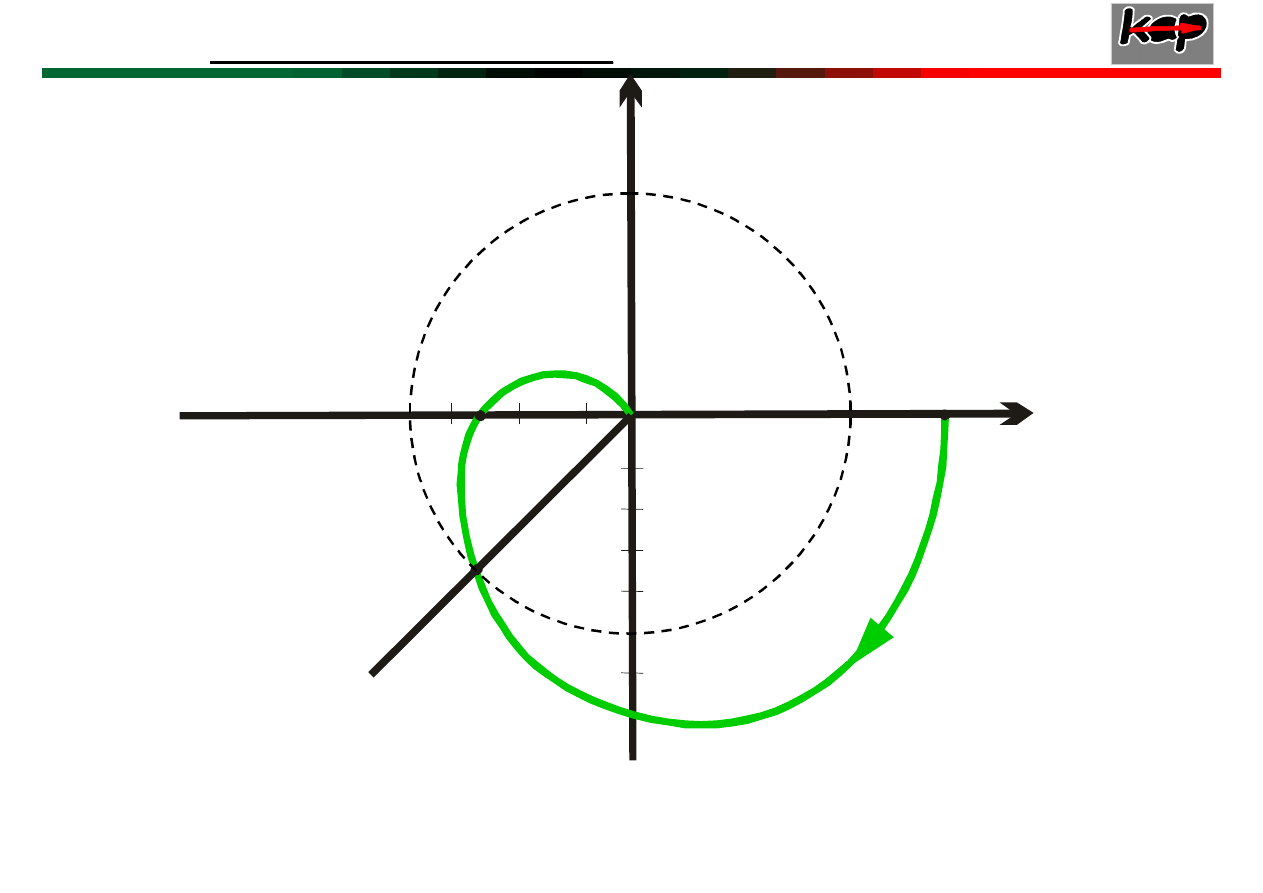
Parametry charakterystyki rzeczywistej transmitancji
układu zamkniętego
P
m
P(0)
ω
m
P
min
ω
n
ω
e
P(
ω
)
0
ω
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
52
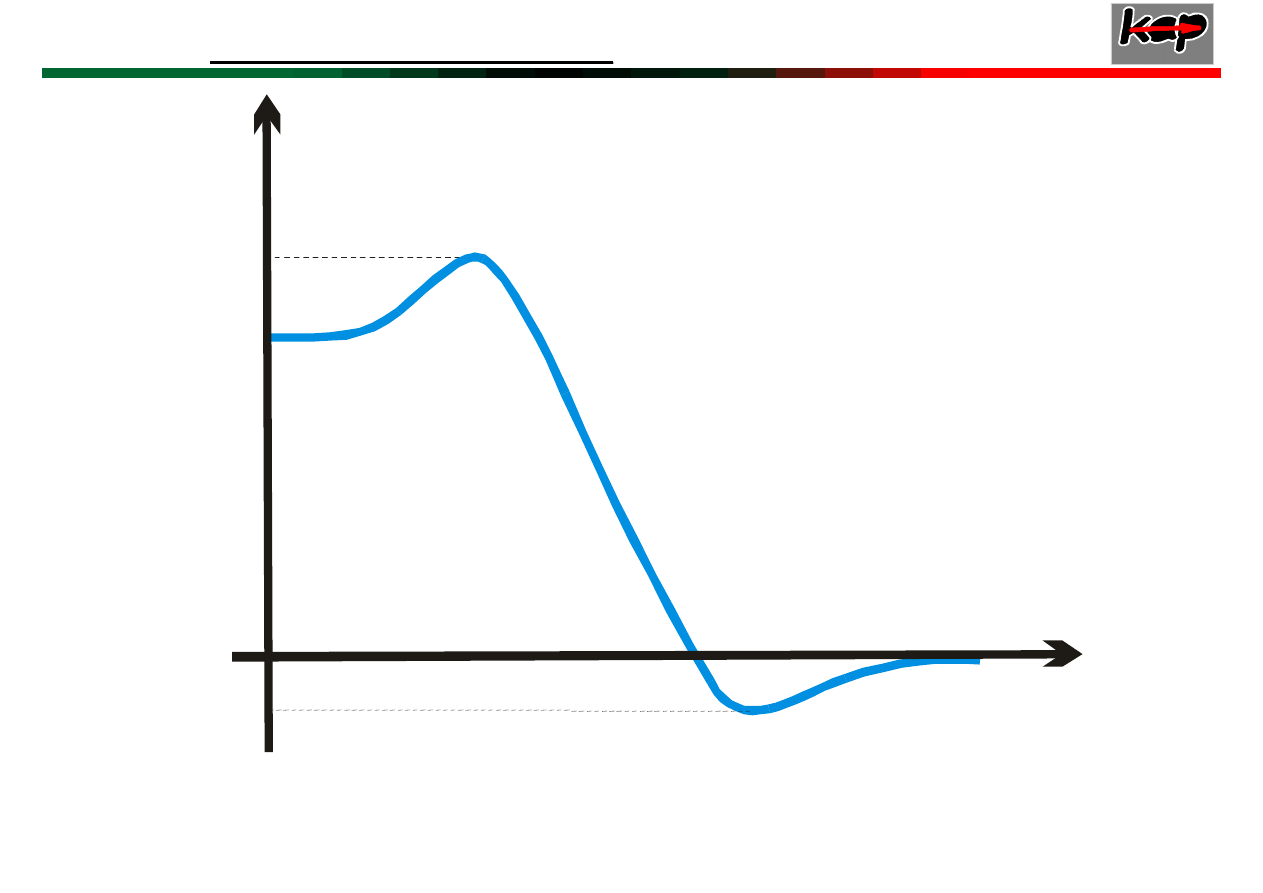
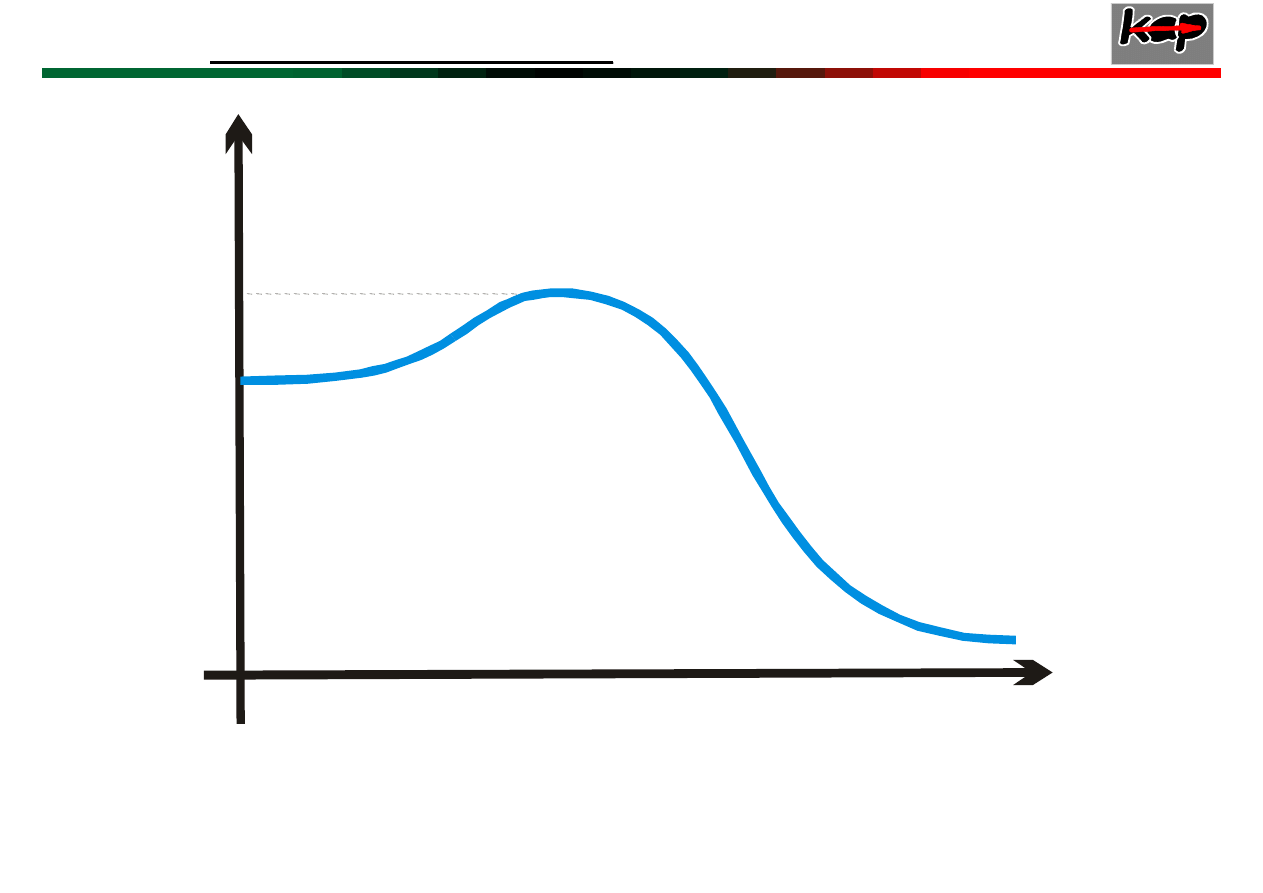
Charakterystyka modułu transmitancji układu
zamkniętego
M
P
ω
p
|G(j
ω
)|
0
ω
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
53
|G
Z
(jw
g
)| = 0,707
9
Miarą pasma częstotliwości przenoszonych
przez układ jest wartość graniczna w
g
, dla której
logarytm modułu transmitancji widmowej
zmniejsza się do wartości –3 dB, czyli
9
Przenoszone pasmo
jest to zakres
częstotliwości, w którym układ zamknięty
przenosi sygnały zadane,
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
54
Schemat blokowy układu regulacji
Wyznaczyć największe możliwe wzmocnienie K
p
regulatora, które zapewni zapas fazy co najmniej
30
°
i zapas modułu nie mniejszy niż 6 dB.
Układ regulacji ma strukturę przedstawioną na
poniższym rysunku. Logarytmiczne charakterystyki
częstotliwościowe obiektu regulacji są przedsta-
wione na kolejnym rysunku.
Przykład 8.5
R
Y(s)
O
–
W(s)
E(s)
U(s)
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
55
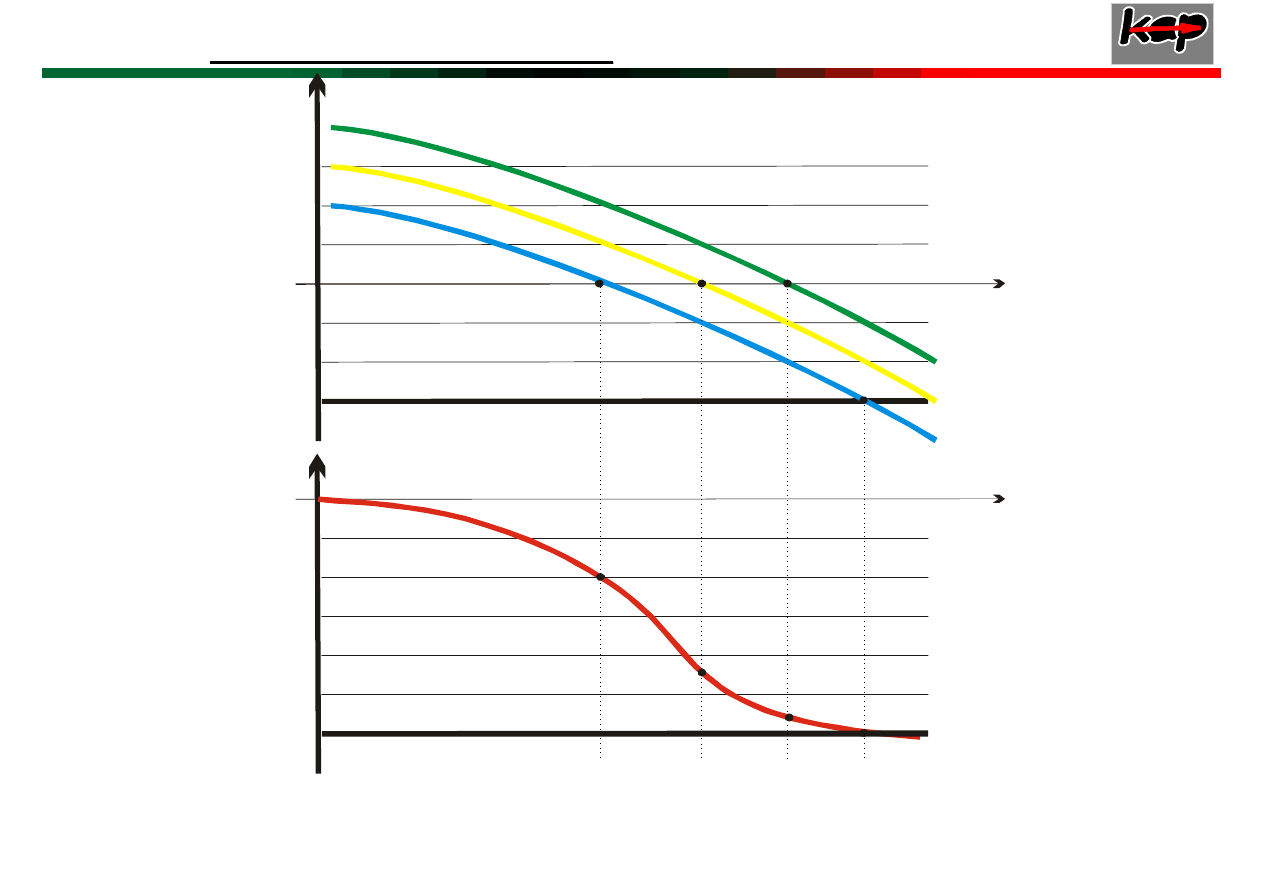
Charakterystyki częstotliwościowe obiektu regulacji
Lm
dB
lg ω
10
20
-10
-20
-30
ϕ
lg ω
-120
-150
-180
-90
-60
-30
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
56
Układ zamknięty bez regulatora (tzn. dla K
p
= 1)
będzie stabilny z zapasem fazy około 120
°
i zapasem
modułu około 30 dB. Wartości te przewyższają więc
znacznie wartości wymagane w przykładzie.
Zmiana wzmocnienia nie powoduje zmiany
charakterystyki fazowej, ale przesuwa w pionie
charakterystykę amplitudową. Dla uzyskania zapasu
modułu 6 dB należy przesunąć charakterystykę
amplitudową w górę o 24 dB. Jednak wówczas zapas
fazy zmaleje poniżej dopuszczalnej wartości i osiągnie
10
°
(krzywa 2). Należy więc dobrać wzmocnienie
wzmacniacza ze względu na zapas fazy.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
57
Lm
dB
lg
ω
10
20
-10
-20
-30
ϕ
lg ω
-120
-150
-180
-90
-60
-30
30
1
3
2
Zmiana charakterystyk częstotliwościowych ze zmianą
wzmocnienia
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
58
Przy tym wzmocnieniu układ zamknięty będzie miał
zapas modułu równy 16 dB, a więc znacznie
przewyższający żądaną wartość.
K
p
= 5, gdyż 20 lg5 = 14 dB
Będzie to osiągnięte, gdy wzmocnienie układu
otwartego wzrośnie o 14 dB. W mierze liniowej:
Charakterystyka fazowa przewyższa poziom – 180
°
o
zadaną wartość 30
°
dla częstotliwości w
3
. Jeżeli dla tej
częstotliwości charakterystyka amplitudowa będzie
przecinała poziom 0 dB (krzywa 3), to układ zamknięty
będzie miał zapas fazy 30
°
.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
59
( )
( )
( )
s
a
s
b
s
G
Z
=
Transmitancję układu zamkniętego możemy określić jako:
Metoda miejsc geometrycznych pierwia-
stków (wartości własnych)
9
Wartości s, dla których a(s) = 0 są punktami, gdzie
G
Z
(s)
→ ∞
, będziemy nazywać biegunami funkcji.
9
Wartości s, dla których b(s) = 0 są punktami, gdzie
G
Z
(s) = 0 i są nazywane zerami.
9
Inaczej mówiąc bieguny są to pierwiastki mianownika
(równania charakterystycznego) a zera są to pierwiastki
licznika.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
60
Istnieje ścisła relacja pomiędzy wartościami własnymi
(biegunami układu zamkniętego) czyli pierwiastkami
równania charakterystycznego a jakością regulacji.
Wtedy na płaszczyźnie zmiennych zespolonych (na
płaszczyźnie s) pojawią się tzw. krzywe pierwia-
stkowe, po których poruszają się pierwiastki równania
charakterystycznego w funkcji tego parametru.
Najprostsza sytuacja przy projektowaniu zachodzi
wtedy, gdy tylko jeden parametr układu regulacji jest
nieznany.
Taki zbiór punktów nazywa się
miejscem
geometrycznym pierwiastków.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
61
( )
σ
+
=
s
s
G
Z
1
W jaki sposób zmienia się odpowiedź skokowa gdy
zmienia się lokalizacja wartości własnych na
płaszczyźnie s. Jeżeli:
Rozważmy układ, którego równanie charakterystyczne
ma jeden pierwiastek rzeczywisty albo pojedynczą
parę pierwiastków zespolonych sprzężonych, na który
działa wymuszenie impulsowe.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
62
9
Kiedy s > 0 bieguny położone są w płaszczyźnie,
gdzie s < 0. Możemy powiedzieć, odpowiedź
impulsowa jest stabilna.
9
Jeżeli s < 0 bieguny położone są na prawo od
początku układu współrzędnych. Ponieważ
wyrażenie wykładnicze rośnie tutaj z czasem,
odpowiedź impulsowa jest oznaczona jako
niestabilna.
( )
( )
t
e
t
g
t
1
⋅
=
−σ
to odpowiedź impulsowa będzie funkcją wykładniczą
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
63
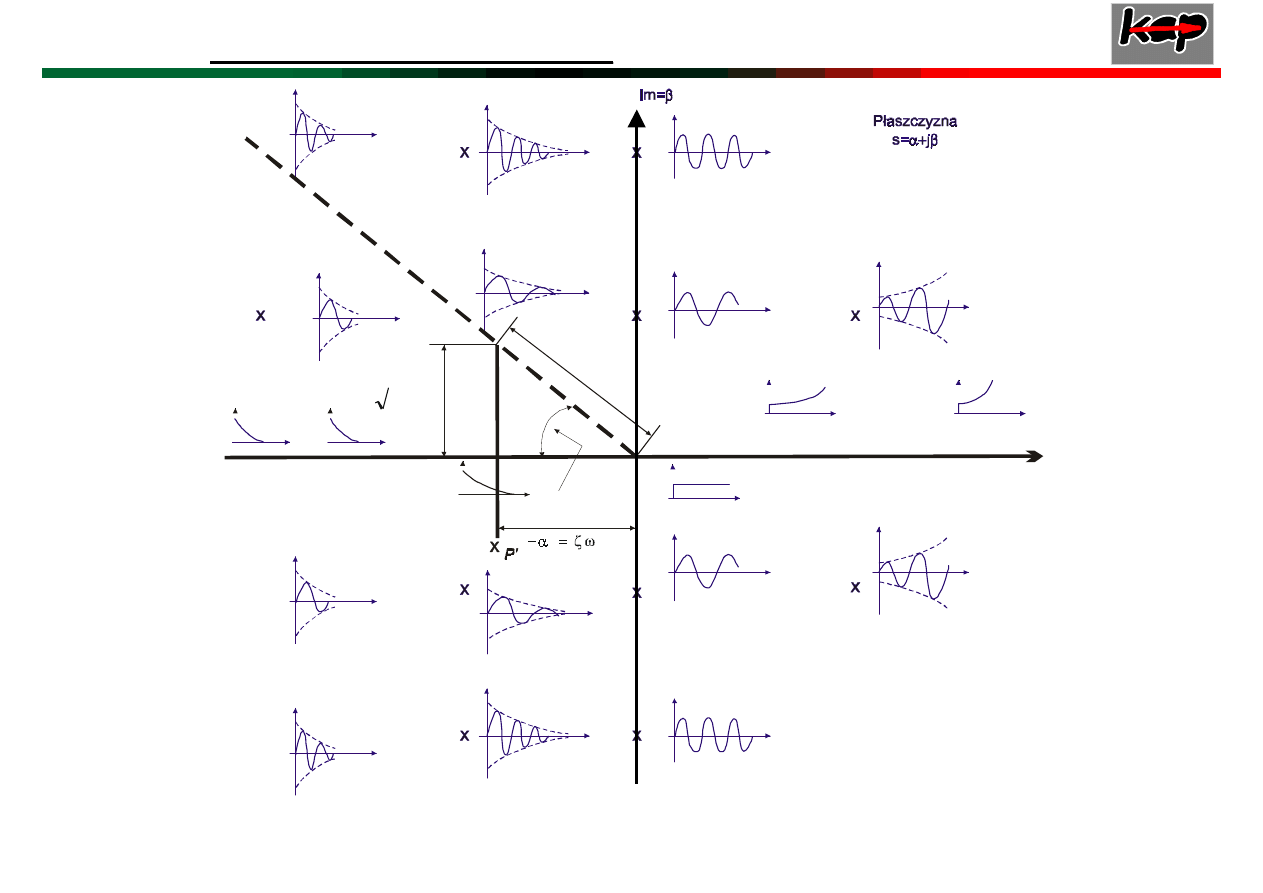
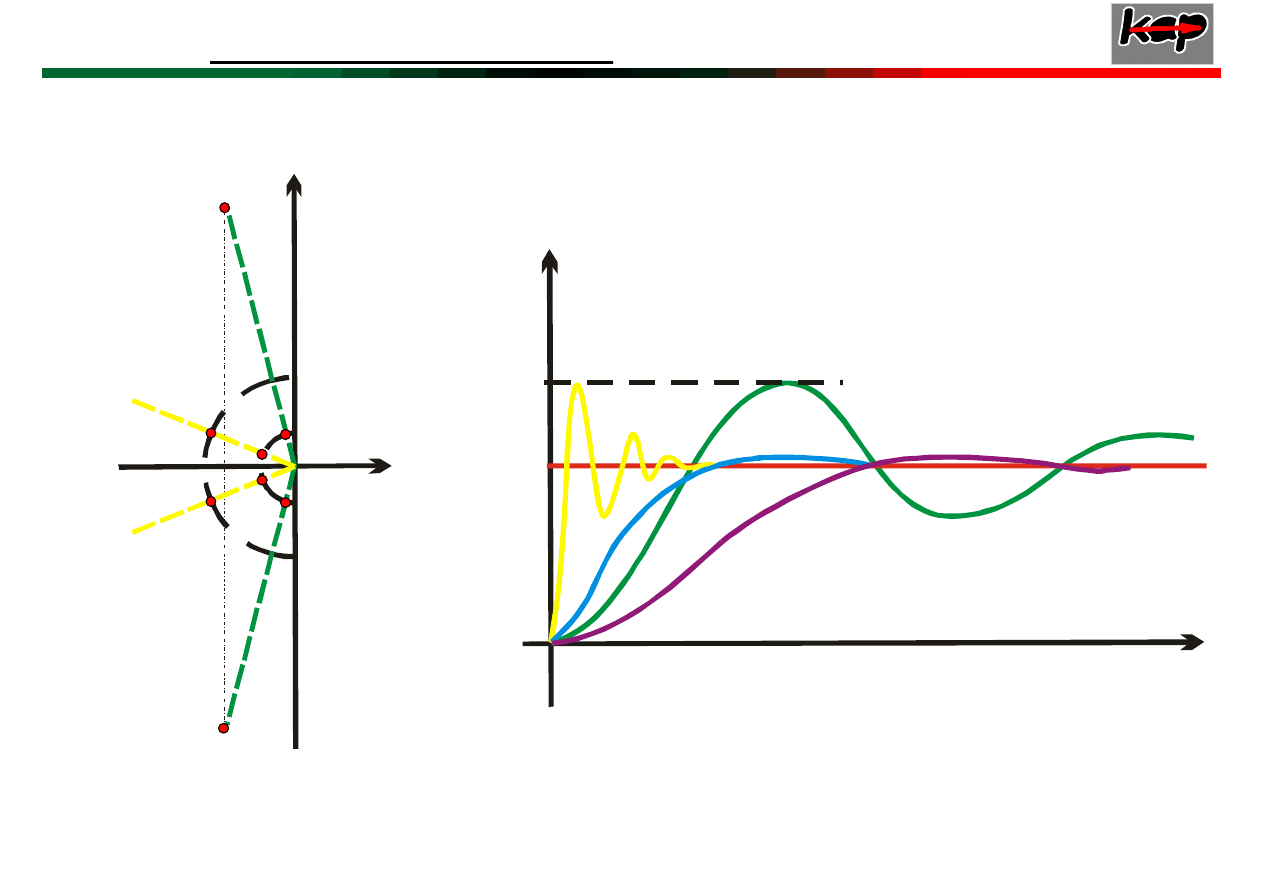
Przebiegi przejściowe w zależności od położenia pierwiastka na
płaszczyźnie s
β
ζ
ω
=
−
2
1
n
θ
ζ =
− 1
c o s
n
ζ ω
α =
−
β
ζ
ω
=
−
2
1
n
θ
ζ =
− 1
c o s
n
0
x
x
x
x
x
x
x
x
x
x
Re=
α
x
P
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
64
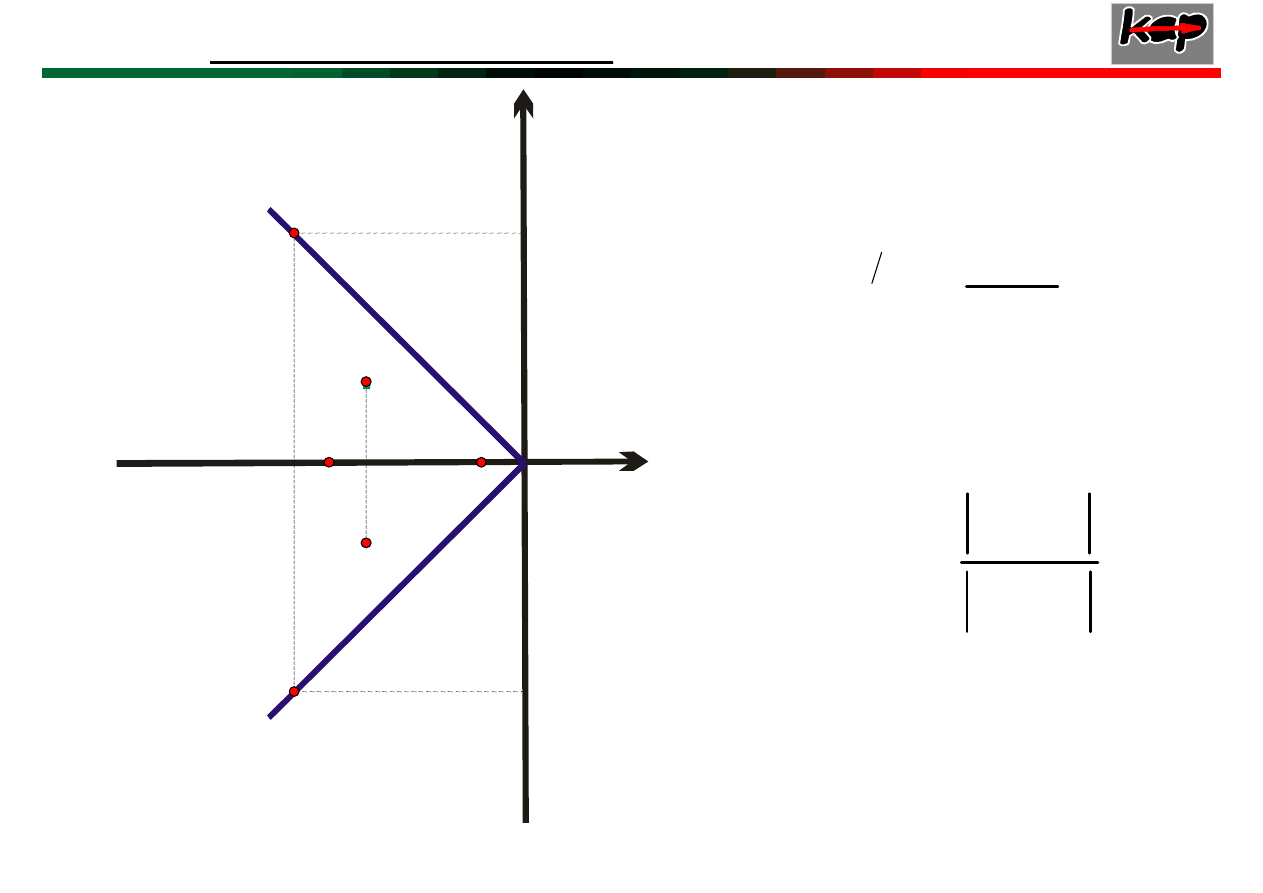
9
Oddalenie pierwiastków od początku układu
współrzędnych mówi o tzw. częstotliwości drgań
własnych układu.
9
Oddalenie pierwiastków zespolonych sprzężonych
od osi rzeczywistej decyduje o częstotliwości drgań
tłumionych w odpowiedzi oscylacyjnej.
9
Pierwiastki leżące najbliżej osi urojonej reprezentują
składowe rozwiązania zanikające najwolniej, a więc
determinujące szybkość działania układu.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
65
h(t)
t
1(t)
1
2
3
4
0
b)
a) rozkłady wartości własnych
b) odpowiedzi skokowe
Związek między rozkładem wartości własnych
a przebiegiem odpowiedzi skokowej
3
1
2
2
4
4
3
Im s
ζ=0,2
ζ=0,2
ζ=0,
9
ζ=0,9
a)
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
66
9
Im mniejsza wartość
µ
, tym mniejsze przeregulowanie A
1
i tym mniejsza liczba oscylacji w czasie t
r
.
9
Przeregulowanie odpowiedzi skokowej zależy od stopnia
oscylacyjności układu
µ
9
Analiza tych nomogramów pozwala na wyznaczenie
obszarów stabilności oraz stopni stabilności na
podstawie których określa się przybliżoną wartość czasu
regulacji.
9
Stopień stabilności układu bez konieczności obliczenia
pierwiastków równania charakterystycznego pozwalają
określić nomogramy Wyszniegradzkiego
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Ocena jakości liniowych układów regulacji
Temat wykładu:
Temat wykładu:
Ocena jakości liniowych układów regulacji
Ocena jakości liniowych układów regulacji
Podstawy Automatyki
Podstawy Automatyki
67
Stopień oscylacyjności układu
k
k
k
s
s
Re
Im
max
=
µ
n
n
A
A
e
1
+
−
=
µ
π
Im s
Re s
Im s
6
-Re s
5
x
x
s
2
s
3
x
x
s
1
s
4
0
s
6
x
s
6
x
-Im s
6
-Re s
6
Wyszukiwarka
Podobne podstrony:
08 Ocena jakości liniowych układów regulacji
Korekcja liniowych układów regulacji
Ćw 7 Korekcja liniowych układów regulacji
Korekcja liniowych układów regulacji, Elektrotechnika, SEM4, ARA ćwiczenia
Korekcja liniowych układów regulacji
6 Dyskretne układy regulacji, rozdział 9 Jakość dyskretnych układów regulacji
Korekcja liniowych układów regulacji
Ćw 7 Korekcja liniowych układów regulacji
8 ocena jakości układów regulacji
8 ocena jakości układów regulacji
Analiza 08, Studia SGGW, WNoŻ Inżynierskie 2008-2012, Sem IV, Ocena jakości
08 Wskaźniki jakości regulacji
wypalanie kamienia wapiennego oraz ocena jakości produktu – wapna palonego. (3), materiały naukowe
Metoda projektowania układów regulacji za pomocą linii pierwiastkowych
analiza egzamin 2010(1), technologia żywności, analiza i ocena jakości żywności
więcej podobnych podstron