15
1
System automatycznego radionamierzania ADF
System składa się z naziemnych radiolatarni NDB (Non-directional Beacon) oraz z urządzeń
pokładowych w skład których wchodzi odbiornik oraz wskaźnik nawigacyjny ARK (Automatyczny
Radio Kompas
) lub w wersji angielskojęzycznej ADF- (Automatic Direction Finders).
Radiolatarnia NDB jest naziemnym nadajnikiem bezkierunkowym pracującym na falach średnich (od
200 do 600 kHzSygnał nadawany przez radiolatarnię NDB zawiera znak rozpoznawczy składający
się trzech znaków Morse'a, powtarzanych co 30 sekund.
Zasięg systemu NDB zależy głównie od mocy nadajnika i wysokości lotu. Dla radiolatarni o mocy
100 W zasięg wynosi około 300 km może być jednak znacznie mniejszy przy locie na małej
wysokości.
Rys. 25 Przykładowe oznaczenie radiolatarni NDB na mapie.
Lokalizacja, częstotliwości pracy oraz znaki rozpoznawcze radiolatarni NDB są dostępne na mapach
oraz AIP.
Odbiornik pokładowy, po dostrojeniu do częstotliwości radiolatarni wskazuje kąt kursowy
radiolatarni (KKR).
Zakres częstotliwości odbiornika wynosi 200 do 1750 kHz - jest rozszerzony w stosunku zakresu
NDB dla umożliwienia namierzania się publicznych stacji radiofonicznych nadających na falach
ś
rednich.
Odbiorniki, niezależnie od typu,
umożliwiają szybkie przełączanie
częstotliwości pracy dla podejść metodą
dwóch NDB.
Wskaźnik radiokompasu może być
samodzielnym lub zespolonym z innymi.
Najczęściej spotykana jest wersja
zespolonego wskaźnika żyrobusoli i ADF
pod nazwą RMI (Radio Magnetic
Indikator
).
15
2
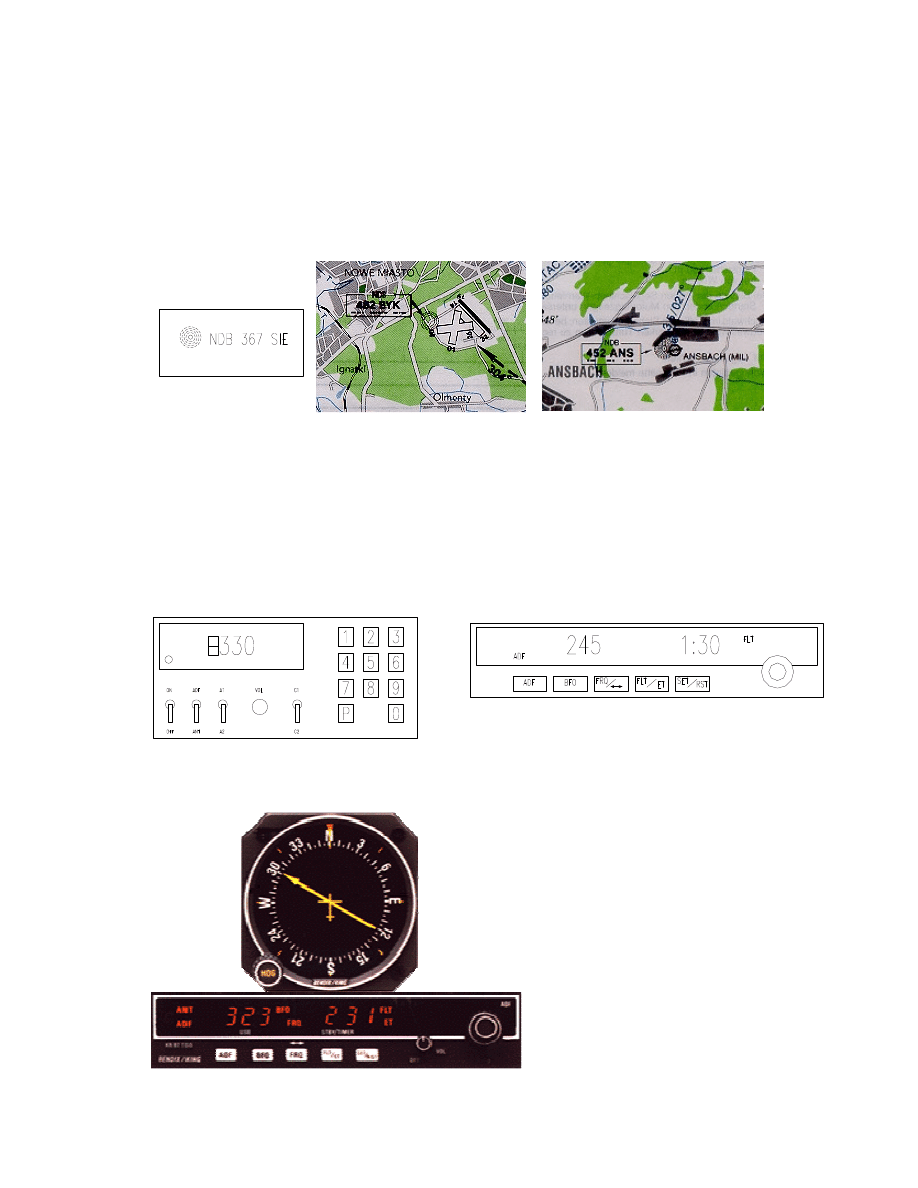
Wskazówka namiarów pokazuje kąt zawarty pomiędzy osią podłużną samolotu a kierunkiem do
radiolatarni (KKR).
Przyjmuje się zasadę że jeżeli precesja wskazówki nie przekracza 10º możemy wskazania
wykorzystać do nawigacji. Jeśli przekraczają tę wartość powinniśmy poczekać aż zbliżymy się do
NDB.
-
brzegowego – spowodowanego oddziaływaniem linii brzegowej,
-
terenowego – spowodowanego odbiciami sygnału od dużych obiektów terenowych
-
włączenie
-
identyfikacja sygnału radiolatarni
-
wykorzystanie wskazania dla celów nawigacyjnych
15
3
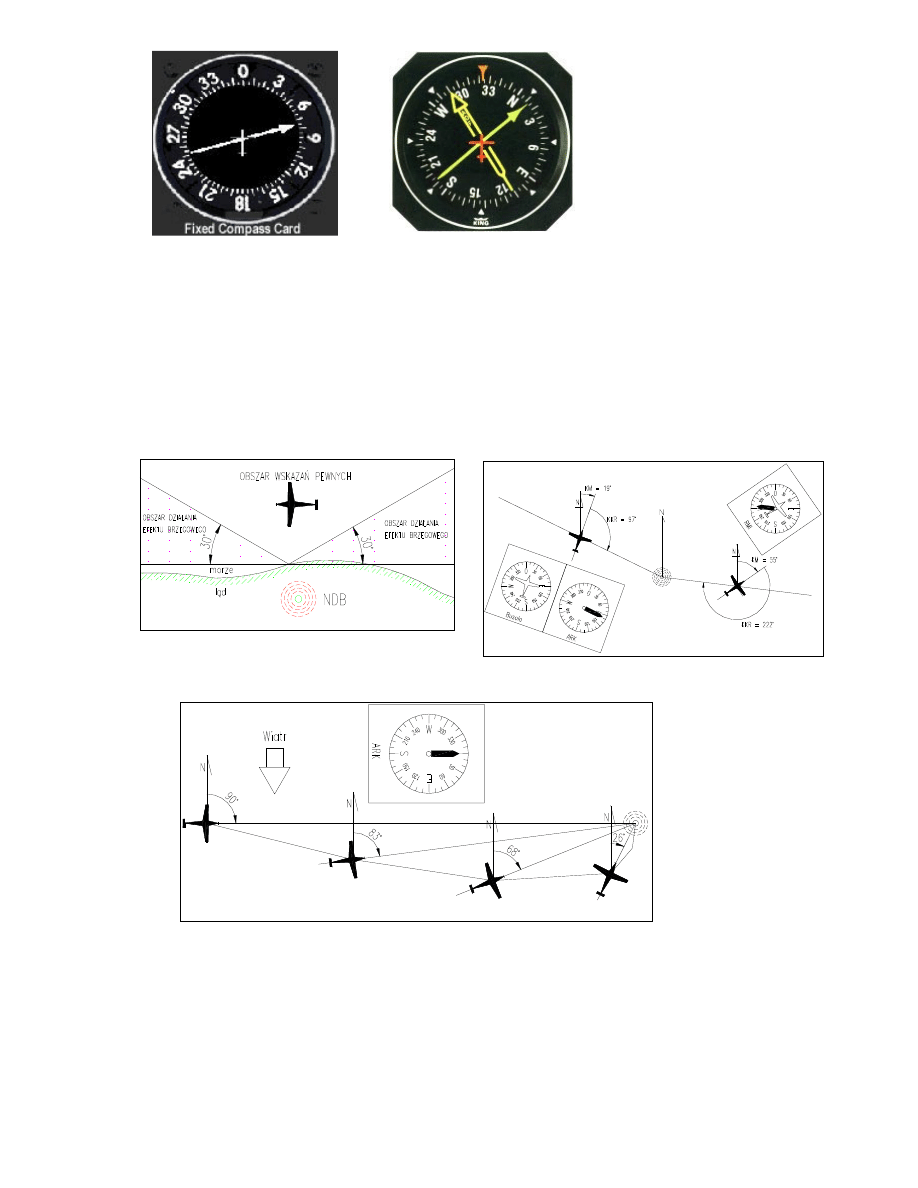
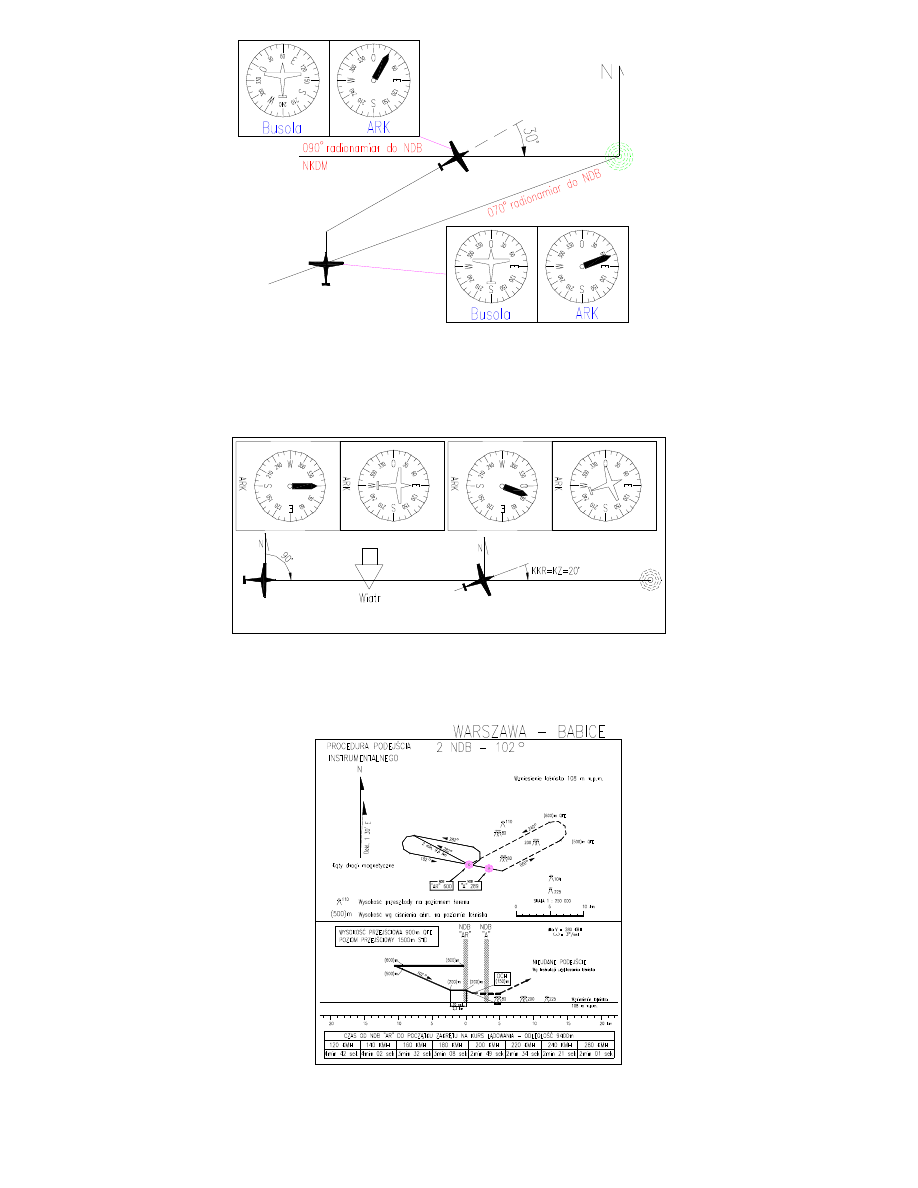
Następnie należy wykonać lot w kierunku zadanego NKDM radiolatarni, dokonując przez cały czas
sumowania wartości KM i KKR. W chwili osiągnięcia zadanego kierunku do radiolatarni zajdzie
równość: KM + KKR = NKDM
Odchylenie liniowe zależne jest od odległości od radiolatarni.
Np. odchylenie o 5
o
w odległości 18 km od NDB daje odchylenie liniowe 1500m. Odchylenie o 5
o
w
odległości 1800m. dale odchylenie liniowe zaledwie o 150m.
15
4
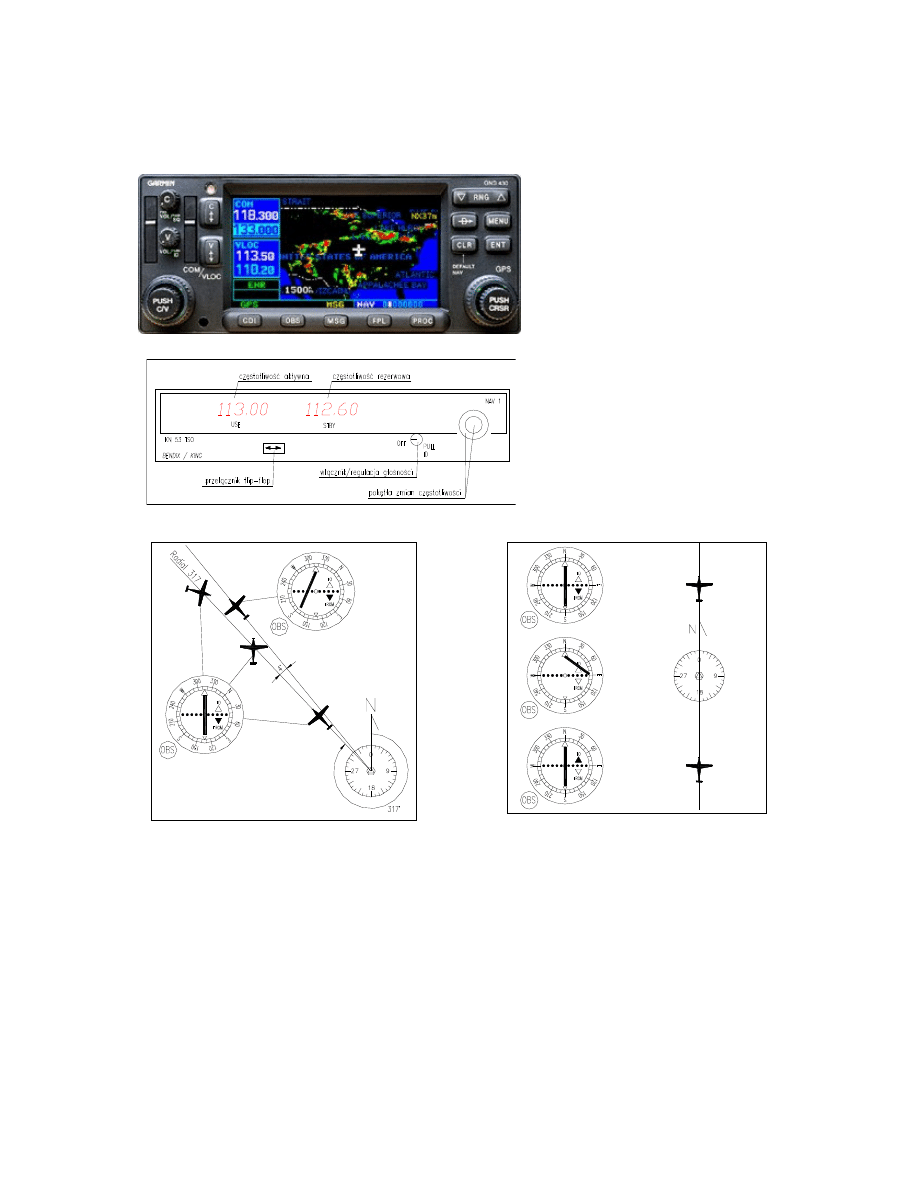
System VOR
System VOR pracuje w paśmie 108 -117.900 MHz z mocą wyjściową od 100 do 200 W.
Kanały w paśmie od 108 - 112 MHz rozmieszczone są co 200 kHz z uwagi na pracę w tym zakresie
również systemu ILS. W pozostałej części kanały rozmieszczone są co 100 kHz.
Z uwagi na charakterystyki antenowe:
-
H-VOR (High Altitude VOR)
-
L-VOR (Low Altitude VOR).
-
D-VOR - Doppler VOR
Namiary wytworzone przez radiolatarnię VOR,
promieniujące od niej na zewnątrz, nazywa się radialami. Radiale są to wyłącznie namiary
magnetyczne odlotowe, identyczne z goniometrycznymi namiarami odlotowymi QDR
Niezależnie od kursu, samolot znajdujący się na południe od radiolatarni, będzie na radialu 180°. W
czasie dolotu po tym radialu, kurs samolotu w warunkach bezwietrznych będzie wynosił 360°.
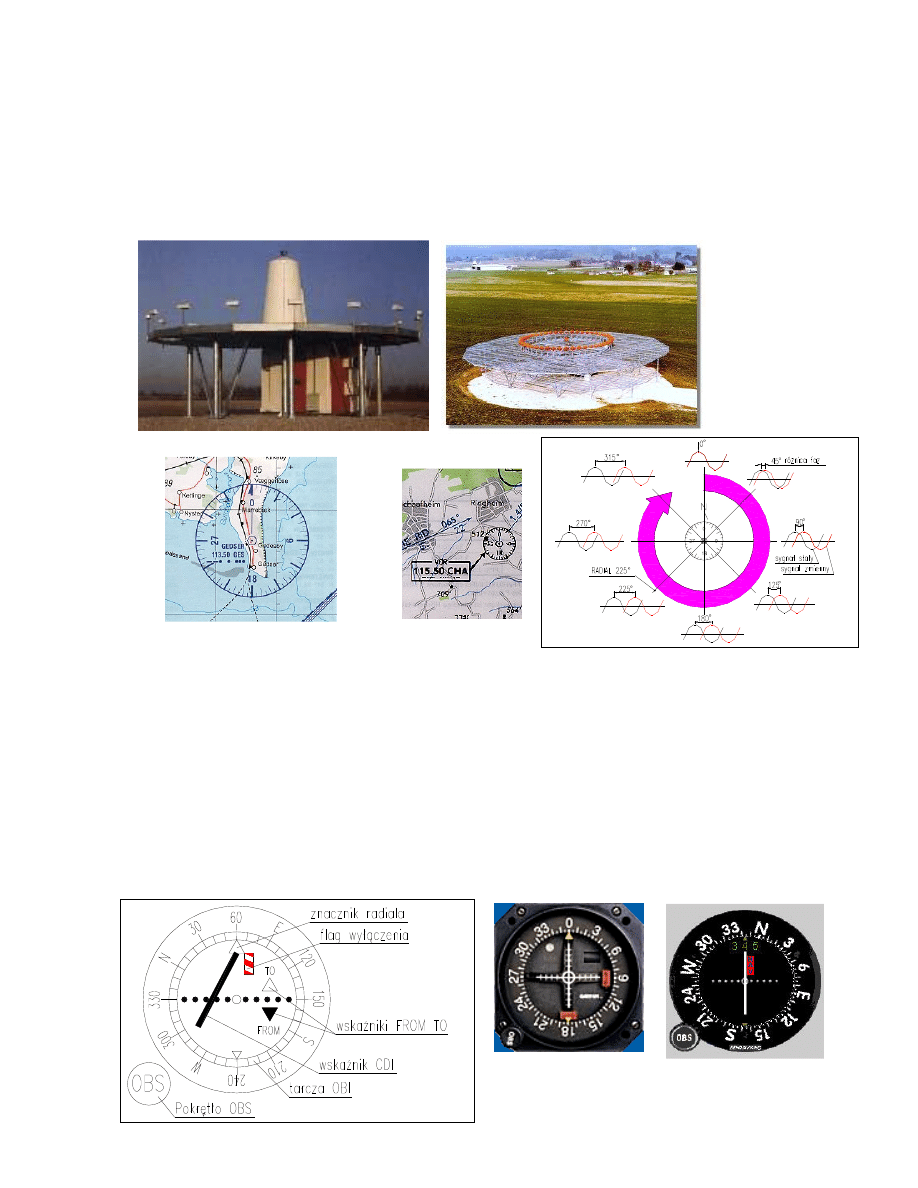
Wskaźnik pokładowy składa się z dwóch części. Obrotowej tarczy ze skalą 360º nazywanej OBI
(Omni-bearing Indicator ) obracanej pokrętłem OBS (Omni-bearing Selector) oraz wskaźnik
krzyżowy (tzw. pałkę) CDI (Cross Deviation Indicator) wskazujący odchylenie aktualnego namiaru
do lub od VOR od wybranego namiaru. Wskazania uzupełniane są znacznikiem (Flag) FROM lub
TO.
15
5
Wskaźniki wykorzystywane również do podejść ILS. Wtedy przyrząd uzupełniony jest poziomym
wskaźnikiem ścieżki schodzenia GS (Glide scope).
W przypadku pracy w trybie ILS wzrasta czułość wskaźnika. Dokładność ±10° dla VOR, zwiększa
się do ±2,5° dla ILS.
15
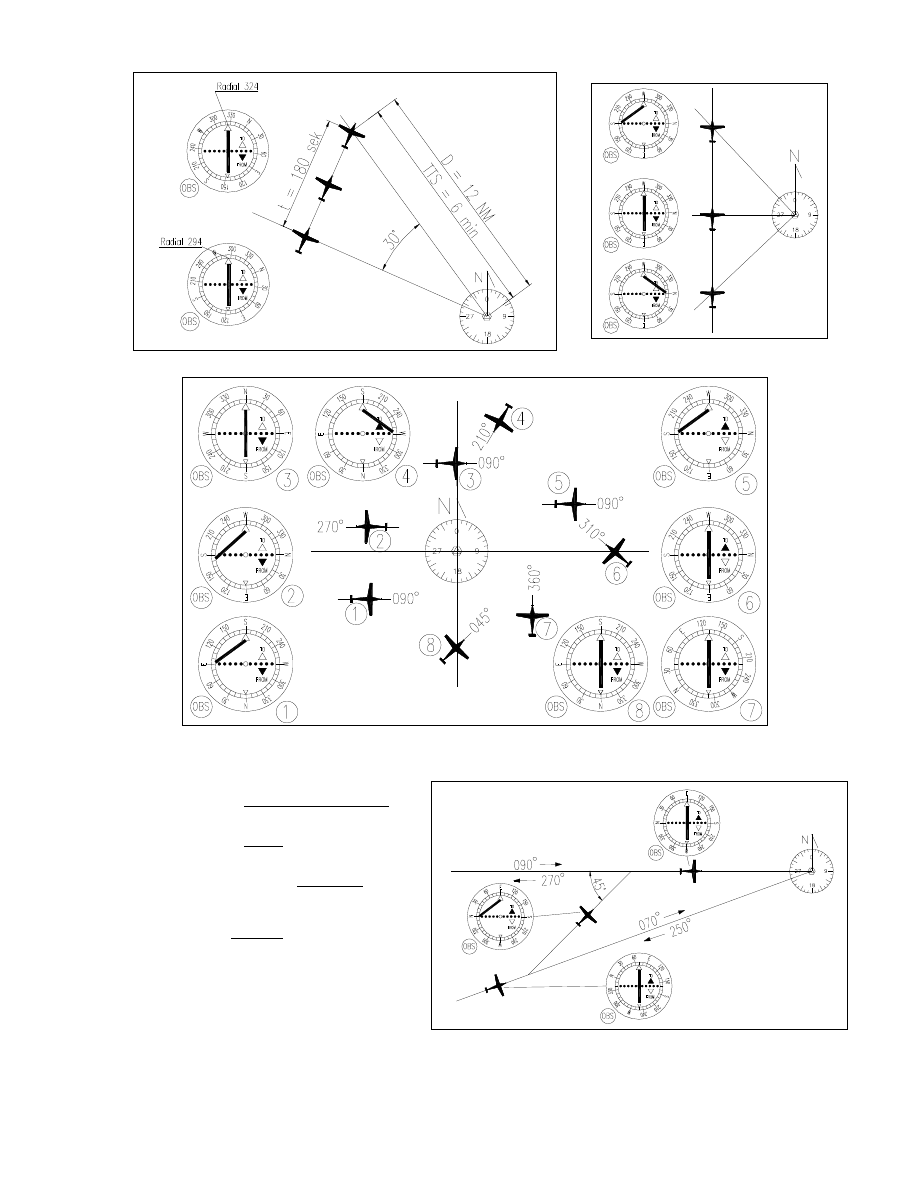
6
czas odcinka (sek.)
TTS (min) =
różnica radialów
180
TTS (min) =
30
= 6 min
W (kts)
D (NM) = TTS (min) 60
D (NM) = 6
120
= 12 NM
60
gdzie:
- TTS
(time to station)
– czasu dolotu do
stacji,
- D (distance) – odległości do stacji,
- W – prędkość podróżna na odcinku
15
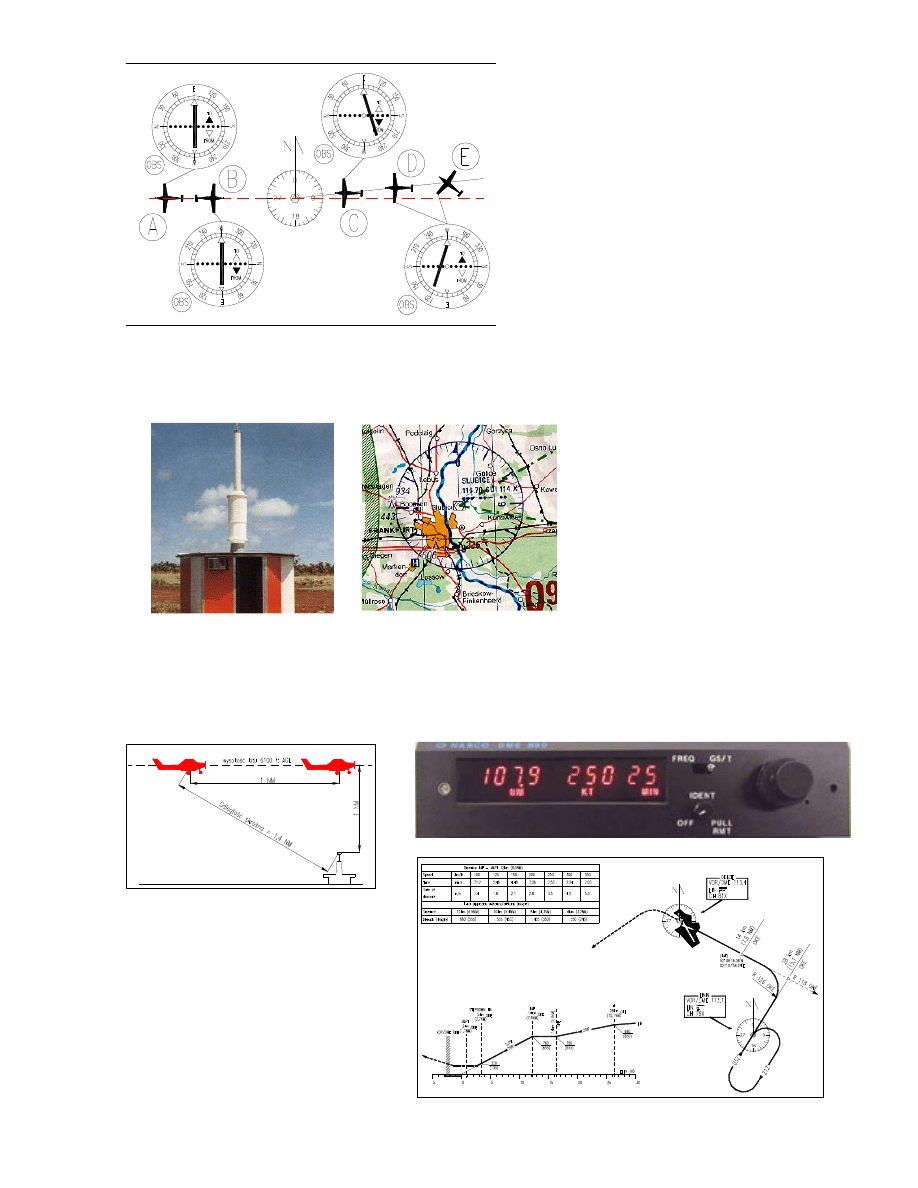
7
Wskazania „adyrektywne” co powoduje że
CDI będzie się wychylał w przeciwną stronę
tzn. od radiala.
Na rysunku obok samoloty A, D i E mają
wskazania dyrektywne a samoloty B i C
adyrektywne
.
System DME
System pomiaru odległości DME (Distance Measuring Equipment) pracuje w paśmie 960 do 1215
MHz z odstępem 1 MHz. Każdy kanał DME wykorzystuje dwie częstotliwości; jedną do zapytania,
drugą do odpowiedzi. Częstotliwości te są przesunięte względem siebie zawsze o 63 MHz.
Pomiar odległości w urządzeniu
pokładowym odbywa się na podstawie
pomiaru czasu od wysłania impulsów
zapytania do otrzymania odpowiedzi.
Dostrojenie pokładowego DME do
radiolatarni odbywa się przez
połączony z nim zestaw VOR/ILS.
W sytuacjach kiedy można niezależnie
dostrajać DME, podaje się częstotliwości VOR.
Po włączeniu urządzenie w czasie do 20 sekund urządzenie sprzęgnie się automatycznie ze stacją
naziemną a po uzyskaniu minimum dwóch pomiarów i wyświetli dane:
- odległość skośna w NM (mile morskie),
- prędkość samolotu w KT (węzły),
- czas dolotu w minutach.
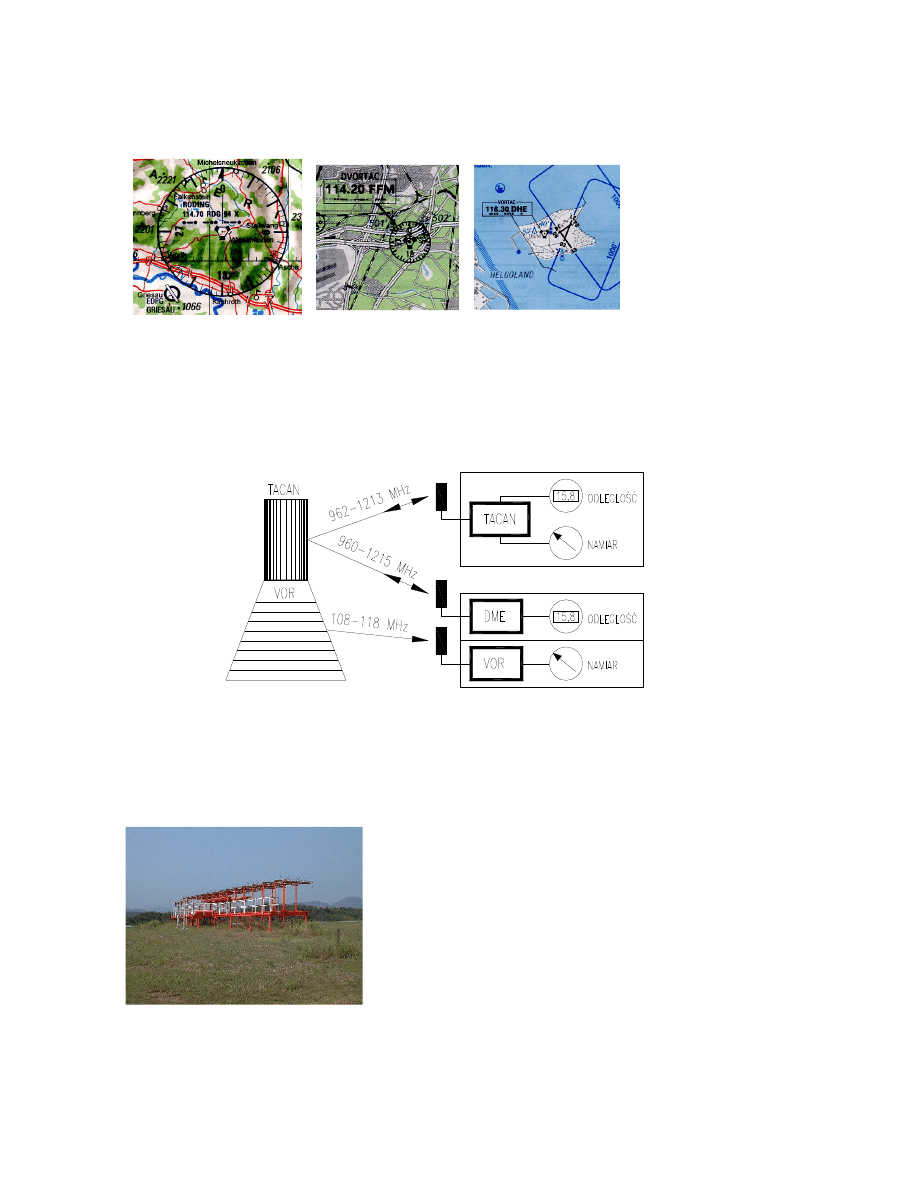
15
8
TACAN (TACtical Air Navigation) jest amerykańskim (NATO-wskim) systemem
radionawigacyjnym pracującym w paśmie 962 - 1213 MHz na 256 kanałach co 1 MHz. Jest to samo
pasmo w którym pracuje DME.
VORTAC to po prostu wspólnie umieszczone radiolatarnie VOR i TACAN. Możemy też spotkać
połączenie VOR, DME i TACAN – VOR/DME-T.
Zasada pracy TACAN-a jest w zasadzie podobna do pracy systemu VOR. Natomiast pomiar
odległości odbywa się na zasadzie DME. Wybór kanału pracy jest typowo wojskowy poprzez wybór
kanału a nie częstotliwości. Dodatkowo numery kanałów mają rozszerzenie X lub Y.
Korzystanie z tych radiopomocy uzależnione jest wyłącznie od wyposażenia pokładowego.
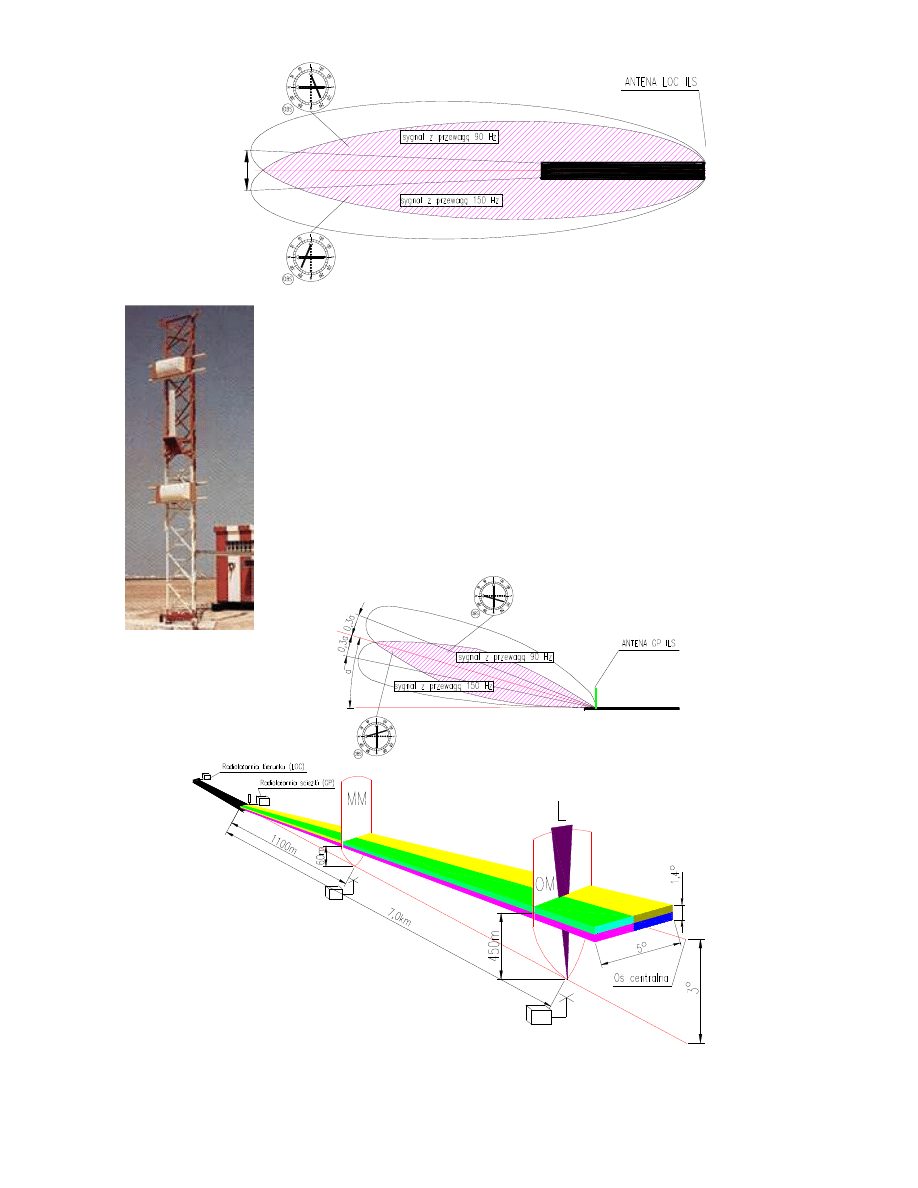
System ILS (Instrument Landing System)
System ILS jest rozwinięciem systemu VOR, również na płaszczyznę pionową i w połączeniem z
systemem DME, markerów oraz oświetleniem pasa umożliwia lądowanie samolotu w warunkach
bardzo ograniczonej widzialności.
Radiolatarnia kierunku podejścia która składa się z zespołu
anten, zlokalizowanych na końcu pasa startowego, i emitującego
dwie wiązki fal radiowych, zmodulowanych amplitudowo
częstotliwościami 90 Hz i 150 Hz.
Często anteny kierunku są uzupełnione zestawem emitującym
sygnał również w kierunku przeciwnym tzw. BB (Back Beam).
Ułatwia on odlot po starcie lub nieudanym podejściu
Zasada pracy jest podobna do VOR. Nadajnik kierunku LOC
(Localizer) pracuje w zakresie częstotliwości 108.1 -111.9 MHz z
odstępem międzykanałowym 200 kHz
Nadajnik kierunku emituje również identyfikacyjny trzyznakowy sygnał Morse’a poprzedzony
znakiem „i”, nadawane tonem 1020 Hz. Zasięg systemu określa się na:
-
25 NM w sektorze ±10°,
-
12 NM w sektorze od ±10° do ±35°,
-
10 NM w sektorze powyżej ±35°.
15
9
Radiolatarnia ścieżki podejścia która składa się z zespołu anten, zlokalizowanych
z boku pasa startowego, emituje dwie wiązki fal radiowych, zmodulowanych
amplitudowo częstotliwościami 90 Hz i 150 Hz. Wiązki nakrywają się wzdłuż
przedłużenia osi drogi startowej; linia 3° ścieżki podejścia jest wyznaczona równą
głębokością modulacji obu sygnałów.
Zasada wyznaczania ścieżki podejścia jest taka sama, jak przy wyznaczaniu
kierunku. Nadajnik ścieżki podejścia (GP - glide path) pracuje w paśmie 328 do
335 MHz. Zasięg radiolatarni ścieżki podejścia wynosi 10 NM w sektorze ±8°.
Jakości systemu ILS ma istotny wpływ na określenie kategorii lotniska:
-
kat. 1 umożliwia podejścia przy RVR=800m. i wysokości decyzji 60m,
-
kat. 2 umożliwia podejścia przy RVR=400m. i wysokości decyzji 30m,
-
kat. 3a przy RVR=200m,
-
kat. 3b przy RVR 50 m,
-
kat. 3c przy RVR=0m.
15
10
Zestaw pokładowy ILS jest zintegrowany z zestawem VOR i składa się z odbiornika VOR/LOC i GP.
Całość uzupełniona jest odbiornikiem markerów.
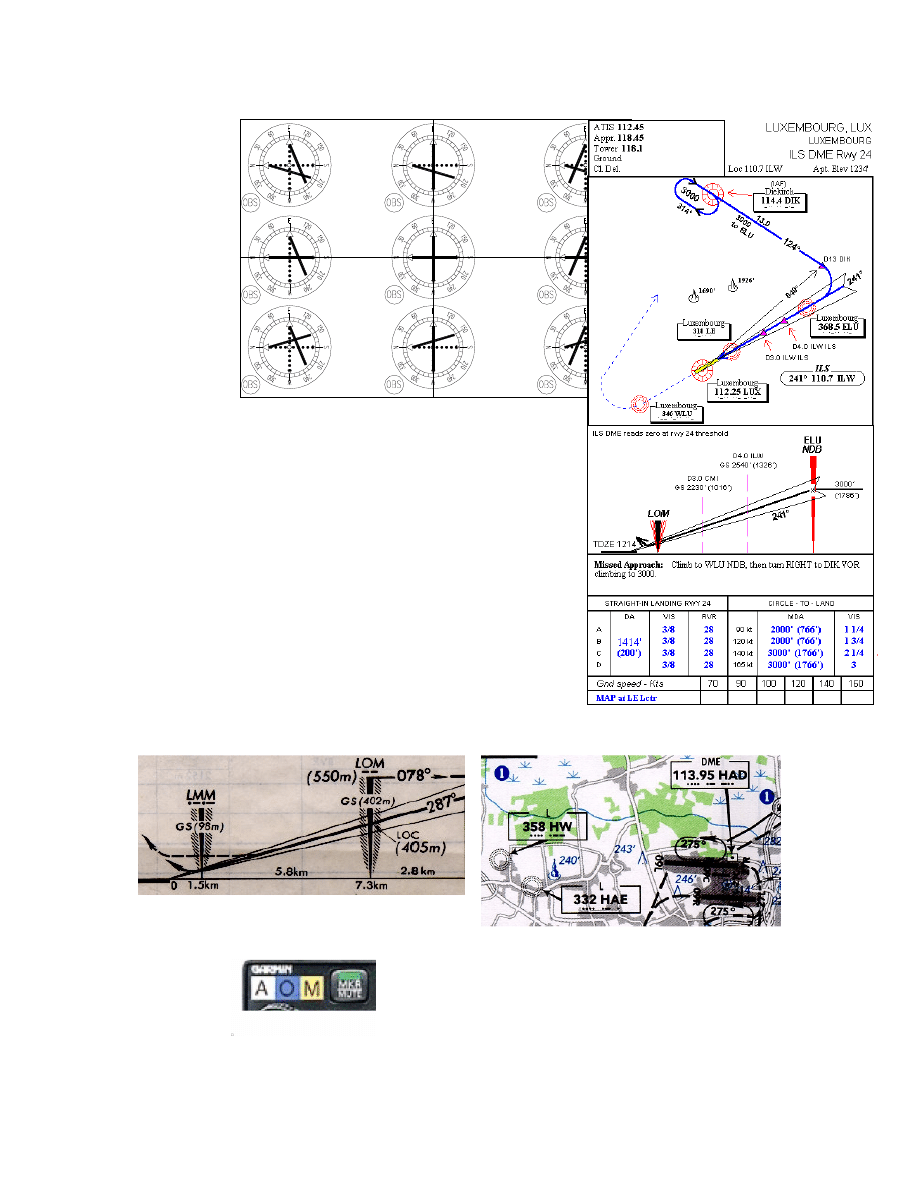
15
11
Po przełączeniu na zakres 108 -112 MHz odbiornik VOR pracuje jako odbiornik kierunku ILS.
Następuje odłączenie OBS, uruchamia się odbiornik ścieżki schodzenia, aktywizuje się wskaźnik GP.
Częstotliwość odbioru LOC i GP jest wybierana razem pary kanałów kierunku i ścieżki.
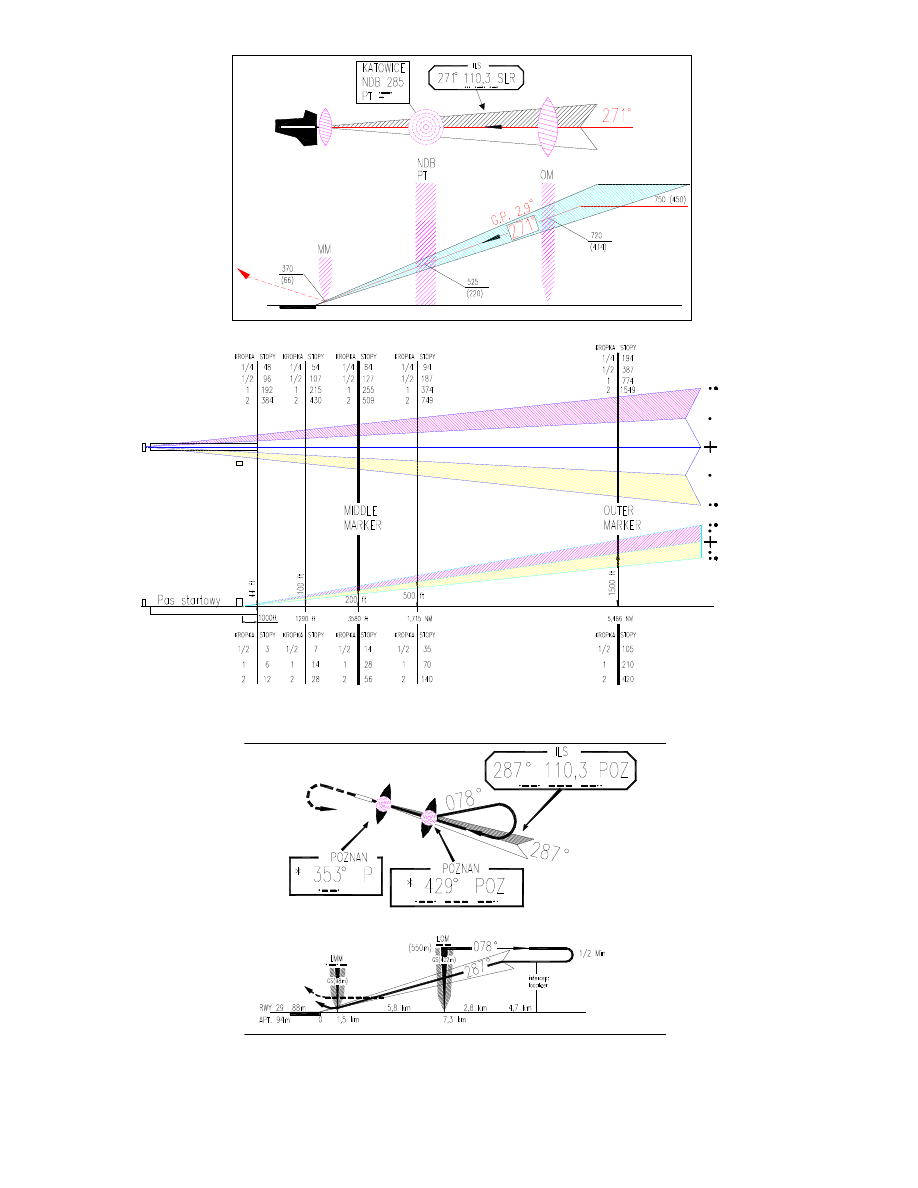
System markerów podejścia
Markery (MRK), są to radiolatarnie znakujące odległość
samolotu od progu pasa podczas podejścia samolotu do
lądowania. Sygnalizacja przejścia nad markerem odbywa się
automatycznie poprzez zapalenie lampki oraz sygnał
dźwiękowy.
Markery pracują na częstotliwości 75 MHz z modulacją
amplitudy:
- marker zewnętrzny (OM - Outer Marker) w odległości 7240
m od progu pasa, nadaje kropki tonem 3kHz i sygnalizowany
jest lampką białą,
- marker środkowy (MM - Middle Marker) w odległości 1070
m od progu, nadaje sygnał kreska-kropka tonem 1,3 kHz i
sygnalizowany jest lampką żółtą (bursztynową – amber),
- marker wewnętrzny (IM - Inner Marker) w odległości 75 m od progu, nadaje kreski tonem 400 Hz i
sygnalizowany jest lampką niebieską.
możemy spotkać jedynie markery zewnętrzny i
wewnętrzny natomiast jest prawie regułą że
wspólnie z markerem zewnętrznym OM zainstalowana jest radiolatarnia NDB tzw. Locator (L)
Systemy nawigacji satelitarnej.

15
12
Dla potrzeb marynarki wojennej USA stworzono system NNSS (Navy Navigation Satellite System) -
„Transit”a w ZSRR system „Cykada”. Na początku lat 70-ch rozpoczęto w USA uruchamianie
systemu GPS (Global Positioning System).
W 1999 r Unia Europejska podjęła decyzję o realizacji przez Europejską Agencję Kosmiczną ESA
programu geostacjonarnego systemu różnicowego „Galileo”.
“GLONASS” jest rosyjskim systemem nawigacji satelitarnej, podobnym do GPS. Dwusystemowe
odbiorniki (GPS + GLONASS) typu GG-24 produkuje firma Ashtec.
Segment kosmiczny składa się z konstelacji 24 aktywnych
satelitów, okrążających Ziemię w ciągu 12 godzin. Na każdej z
sześciu orbit konstelacji znajdują się cztery satelity na wysokości
ponad 20 000 km nad powierzchnią Ziemi.
Z każdego punktu na kuli ziemskiej możliwy jest odbiór sygnałów
do 5 do 12 satelitów.
Segment kontroli to pięć stacji monitorujących, których zadaniem
jest śledzenie aktualnych pozycji satelitów, synchronizacja zegarów
oraz ustalanie aktualnych poprawek do depesz nawigacyjnych
emitowanych przez satelity.
Segment użytkownika stanowią wszystkie odbiorniki satelitarne.

15
13
parametry techniczne.
-
ilość kanałów odbiorczych– minimalnie 4, dla trójwymiarowych odczytów pozycji.
-
dokładność wyznaczania pozycji i prędkości
-
czas akwizycji
-
czas reakwizycji.
-
czułość odbiornika,
-
stosunek sygnał/szum,
-
odporność na zakłócenia,
-
dopuszczalne przeciążenia i odporność na warunki środowiskowe,
-
pobór prądu i zakres napięć zasilających,
-
możliwość współpracy z innymi urządzeniami np. z BRI (Beacon Receiver Input).
Klasyfikacja jakościowa urządzeń odbiorczych:
-
klasa A – odbiorniki posiadające wewnętrzny system kontroli danych RAIM (Receiver
Autonomous Integrity Monitoring
), który weryfikuje wskazania sygnałów z NDB, VOR i
DME (informacje o położeniu i częstotliwościach pobiera z własnej bazy danych),
-
klasa B – odbiornik GPS stanowi źródło informacji dla systemu nawigacyjnego a funkcje
RAIM realizuje odbiornik lub system nawigacyjny,
-
klasa C – odbiornik pracuje podobnie jak w klasie B ale system nawigacyjny posiada funkcje
sterowania autopilotem.
Każdy satelita transmituje dwa rodzaje sygnałów: L1 (1575.42 MHz) i L2 (1227.60 MHz).
Sygnał L1 jest przetwarzany dwoma pseudo-przypadkowymi sygnałami zagłuszającymi, chronionym
kodem P i kodem C/A.
Sygnał L2 zawiera jedynie kod P.
Ponieważ każdy satelita wysyła inny sygnał, umożliwia to odbiornikom rozpoznanie, z którego
satelity pochodzi dany sygnał.
Cywilne odbiorniki do nawigacji wykorzystują jedynie kod C/A na częstotliwości L1 i pracują w tzw.
SPS (Standard Positioning System).
PPS (Precise Positioning System) jest przeznaczony dla armii USA i NATO oraz niektórych agencji
rządowych i autoryzowanych użytkowników cywilnych i wykorzystuje przetwarzanie sygnału o
częstotliwości L2 w celu uzyskania dokładnych pomiarów.
Standardowy odbiornik cywilny zapewnia dokładność poziomą rzędu 20 m przez 95% czasu.
Do 1 maja 2000 roku dokładność ta była mniejsza (ok. 100 m) ze względu na celowe zagłuszanie
sygnału przez armię USA, zwane ograniczonym dostępem - S.A. (Selective Availability).
Dokładność pionowa jest około 1.5 razy mniejsza niż dokładność pozioma.
Dodatkowo mogą występować niedokładności spowodowane błędami wynikającymi z:
-
opóźnienia jonosferycznego i troposferycznego wynikających z opóźnień propagacyjnych,
-
błędów efemeryd spowodowany różnicą między położeniem satelity wyliczonym z danych
orbitalnych a rzeczywistym,
-
błędu zegara satelity,
-
błędu sygnałów odbitych od obiektów naziemnych,
-
błędu pomiaru odbiornika spowodowanego zakłóceniami od innych urządzeń
elektronicznych.
Dla wyeliminowania tych błędów stworzono system korekcji DGPS (Differential GPS) polega on na
uzupełnieniu danych o lokalizacji o dane uzyskane ze stacji radiowych, o znanym położeniu), które
także odbierają sygnały z satelitów i obliczają poprawkę. Dla prawidłowego wprowadzenia poprawek
konieczna jest też informacja z których satelitów korzystały stacje naziemna i pokładowa.
Pozycje wyznaczane przez system GPS opierają się na układzie odniesienia zwanym WGS84 (World
Geodetic System 1984
).
15
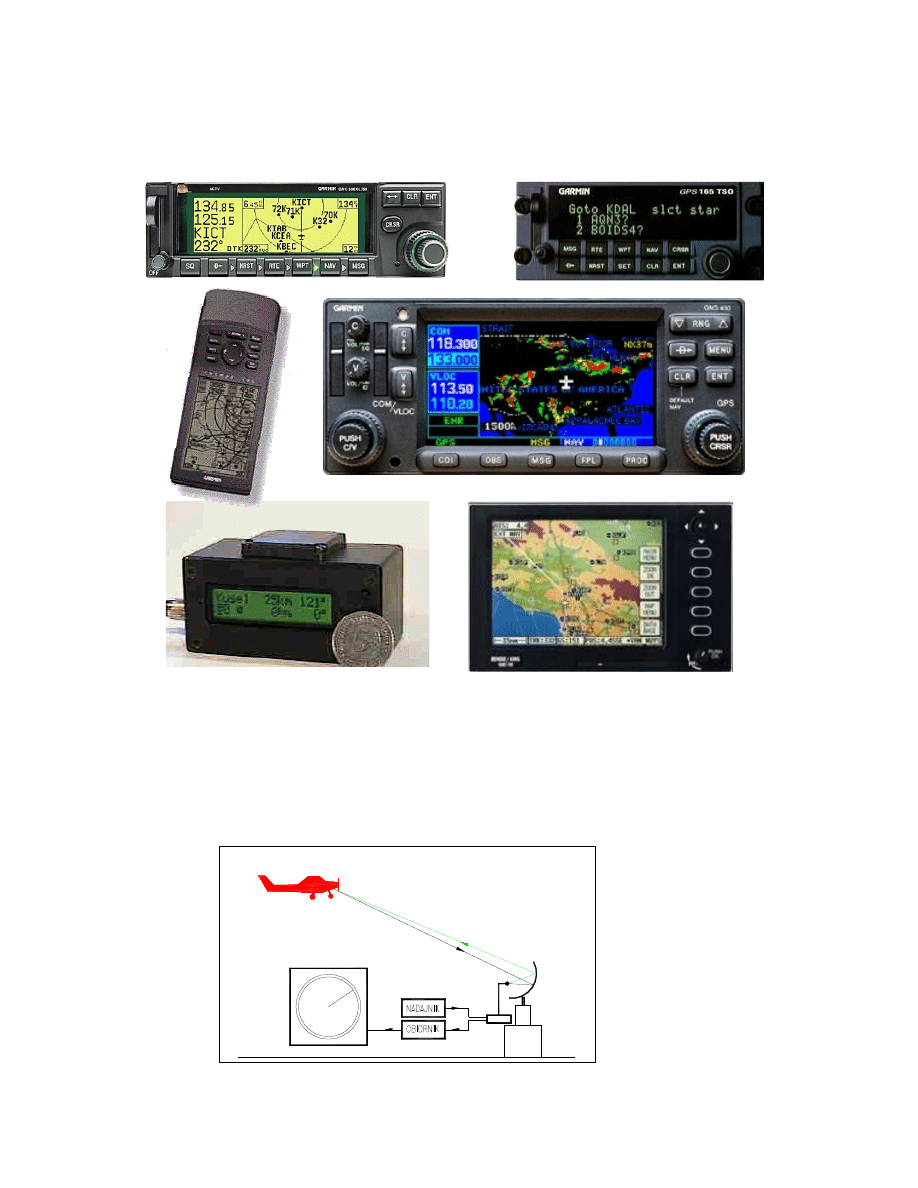
14
Stosowane w lotnictwie sportowym odbiorniki GPS można podzielić na dwie grupy:
-
panelowy (panel mount) – zainstalowane na stałe w tablicy – wyposażone w fabrycznie
wykonaną instalacją antenową i zasilającą,
-
ręczny (handheld) – stanowiące zwykle osobiste wyposażenie pilota – z anteną zintegrowaną
lub wyniesioną, bez stałej instalacji zasilania.
-
DDDDhhhhmmm – stopnie, minuty, sekundy,
-
DDDDhhh,mm – stopnie, minuty, sekundy itd.,
-
DDDDhhhhmmm – stopnie, minuty, sekundy,
Systemy radiolokacyjne.
Radar pierwotny.
15
15
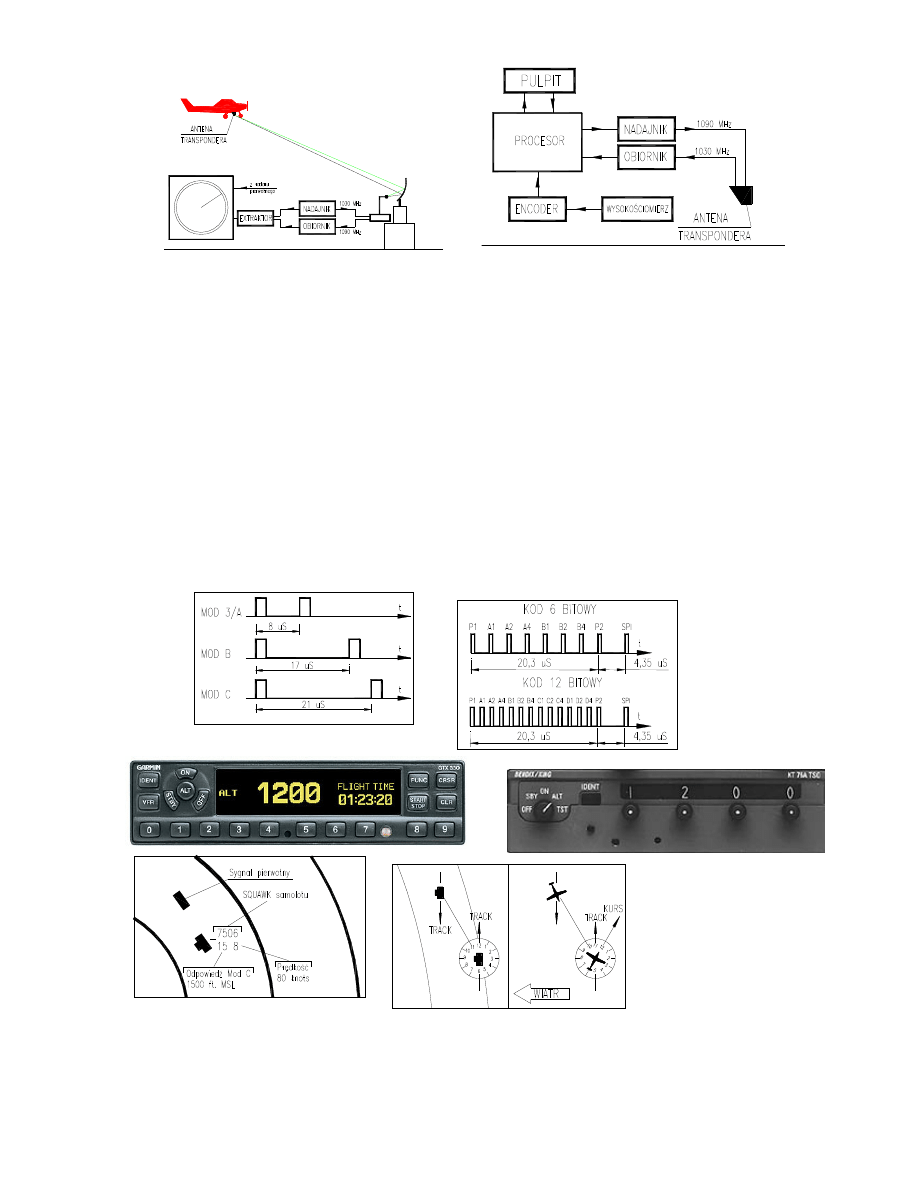
Radar wtórny – transponder.
Radar ten emituje impulsową wiązkę sygnałową na częstotliwości 1030 MHz. Po dotarciu do
pokładowego urządzenia zwanego transponderem, pobudza je do wysłania zakodowanej wiadomości
zwrotnej na częstotliwości 1090 MHz. Wiadomość ta pozwala na ekranie wskaźnika radaru uzyskać
informację o statku powietrznym. Żadnych innych sygnałów antena radaru wtórnego nie odbiera.
−
Mod 3/A - odpowiedź 6 impulsowa. Pozwala na wybór jednej z 64 kombinacji (cyfry od 0 do 7).
Ten typ transpondera stosowany w lotnictwie wojskowym. Odpowiedź w modzie 3/A emitowana
jest na zapytanie radaru w którym impulsy oddalone są od siebie o 8µ sek.
−
Mod B - odpowiedź 12 impulsowa. Pozwala na wybór jednej z 4096 kombinacji. Standardowy
typ transpondera dla lotnictwa cywilnego i stanowi odpowiedź na zapytanie w którym impulsy
oddalone są od siebie o 17µ sek.
−
Mod C - odpowiedź z aktualną wysokością w setkach stóp na ciśnieniu STD (poziom lotu) ze
specjalnego wysokościomierza (enkoder) cywilnego i stanowi odpowiedź na zapytanie w którym
impulsy oddalone są od siebie o 21µ sek.
−
Mod S – odpowiedź z możliwością użycia ponad 16 milionów kodów, które poza standardowymi
odzewami modów 3/A i C pozwala na prowadzenie transmisji danych pomiędzy samolotem a
stacją radarową.
- MAYDAY squawk 7700,
- utrata łączności – 7600
- porwanie – 7500
Wyszukiwarka
Podobne podstrony:
Seminarium3 Inne zaburzenia genetyczne
Inne zaburzenia psychotyczne
Inne zaburzenia psychotyczne J PEłka Wysiecka
26 Inne ideologie
Inne stany nagłe
Połączenia ksztaltowe inne
WYKŁAD8 Inne 1 2
Poker współczesny Texas Hold'em i inne odmiany pokera (2)
12 urazy i choroby brzucha i kl piersiowej oraz inne
Gdzie sie podziala antymateria i inne zagadki
INNE ŚWIATY Tajemnice Kosmosu cz 5 Jowisz
więcej podobnych podstron