
Laboratorium Podstaw Elektrotechniki i Elektroniki
dla studentów WIP
Temat:
SILNIK INDUKCYJNY 3 FAZOWY
materiały pomocnicze do laboratorium elektroniki, elektrotechniki i energoelektroniki
wyłącznie do użytku wewnętrznego przez studentów WIP PW
bez prawa kopiowania i publikowania
Zakład Trakcji Elektrycznej
IME PW 2002
-
2
-
1. Budowa i zasada działania silnika asynchronicznego
Silniki asynchroniczne, zwane potocznie indukcyjnymi są maszynami na prąd przemienny.
Wyróżnia się trzy tryby pracy takiej maszyny: praca prądnicowa, praca silnikowa oraz praca
hamulcowa. Silniki indukcyjne są najpowszechniej stosowanymi silnikami w przemyśle,
zwłaszcza jako maszyny trójfazowe. Silniki indukcyjne jednofazowe stosowane w
przeważającej części sprzętu gospodarstwa domowego. Napędy specjalne wykorzystują
silniki dwufazowe.
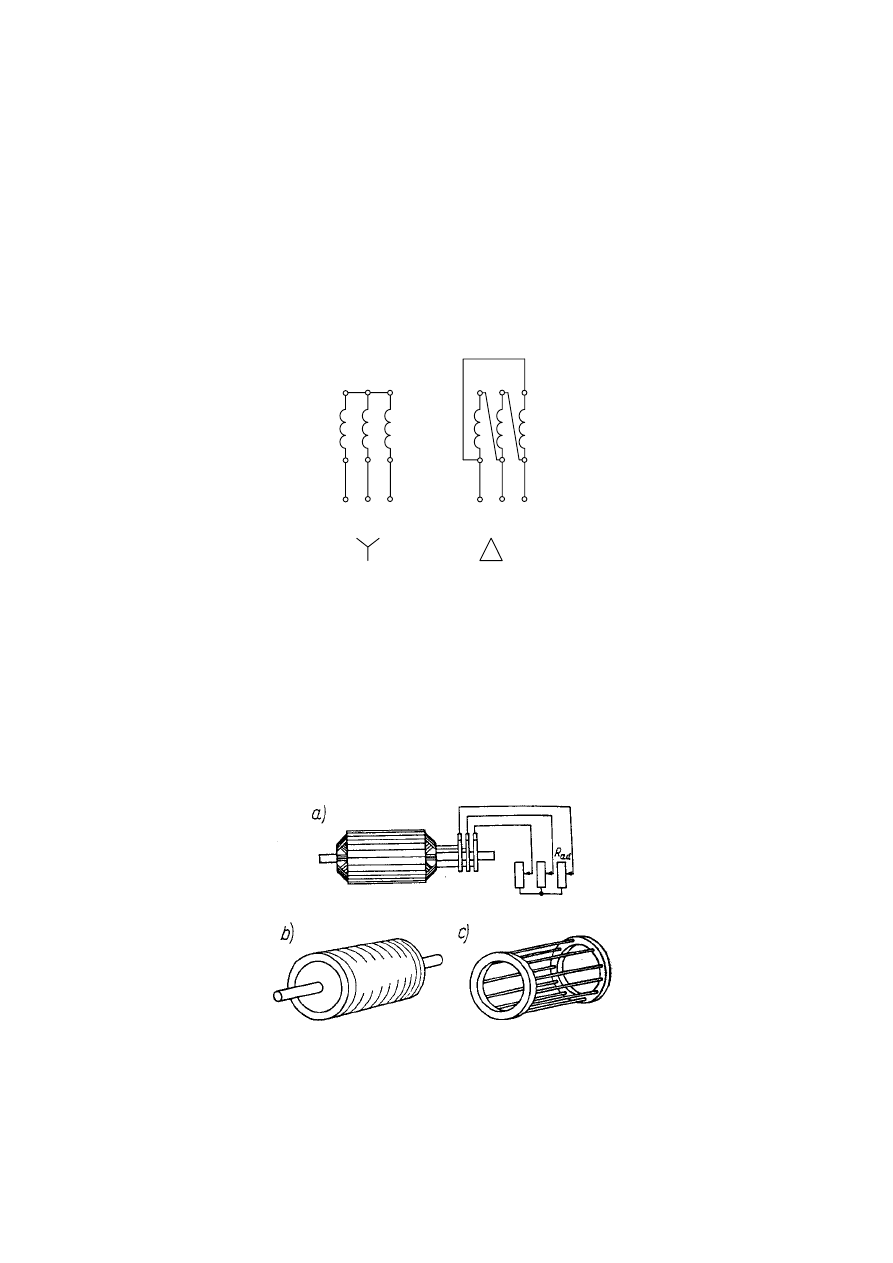
Jak każda maszyna wirująca silnik indukcyjny składa się ze stojana i z wirnika. Stojan
posiada p par biegunów i m faz. Na rysunku 1.1 pokazany jest sposób połączeń uzwojeń w
stojanie silnika asynchronicznego trójfazowego.
1
U
1
V
1
W
2
U
2
V
2
W
R
S
T
1
U
1
V
1
W
2
U
2
V
2
W
R
S
T
Rys. 1.1 Połączenia stojana silnika i sposób oznaczania: w gwiazdę i w trójkąt
W maszynach 3 fazowych osie uzwojeń przesunięte są o kąt 120
°. Są one zawinięte w
żłobkach rdzenia stojana, który wykonany jest z izolowanych wzajemnie blach krzemowych.
Wirnik silnika indukcyjnego wykonany jest podobnie jak stojan, liczba par biegunów p jest
taka sama jak w stojanie, ale liczba faz może się od niego różnić. Ze względu na rodzaj
uzwojenia wirnika wyróżnia się wirniki pierścieniowe i klatkowe (rys 1.2).
Rys.1.2 Budowa wirnika silnika indukcyjnego: a) pierścieniowego, b) klatkowego (zwartego),
c) uzwojenie wirnika klatkowego
-
3
-
Uzwojenia wirnika pierścieniowego są wykonane tak samo jak stojana i połączone z
pierścieniami ślizgowymi. W ten sposób uzwojenia te mogą być zwierane lub dołączane do
nich mogą być dodatkowe rezystory. (rys 1.2a)
Konstrukcja wirnika klatkowego oparta jest na klatce - tworzą ją pręty miedziane lub
aluminiowe (umieszczone w żłobkach), z izolacją lub bez, połączone na obu końcach do
pierścieni (rys.1.2c). Liczba faz uzwojenia wirnika klatkowego jest równa liczbie prętów w
klatce.
W wirniku indukowany jest prąd, który oddziaływuje z wirującym polem magnetycznym
stojana powodując ruch obrotowy wirnika. Prędkość obrotowa wirnika jest nieco mniejsza niż
prędkość wirowania pola magnetycznego stojana - tylko w takich warunkach w uzwojeniach
wirnika indukowane są siły elektromotoryczna (prądy wirnika), a więc wirnik obraca się
asynchronicznie względem pola stojana.
Definiuje się pojęcie poślizgu jako różnicę prędkości pola stojana względem prędkości
obrotowej wirnika odniesiona do prędkości pola stojana (czyli prędkości synchronicznej):
s
n
n
n
s
s
=
−
Prędkość synchroniczna (wyrażona w obrotach na sekundę) jest ilorazem częstotliwości
prądu stojana i liczby par biegunów:
n
f
p
s
s
=
Prędkość obrotowa wirnika wynosi:
n
n
s
s
=
−
(
)
1
zaś częstotliwość prądu w jego uzwojeniach:
f
sf
r
s
=
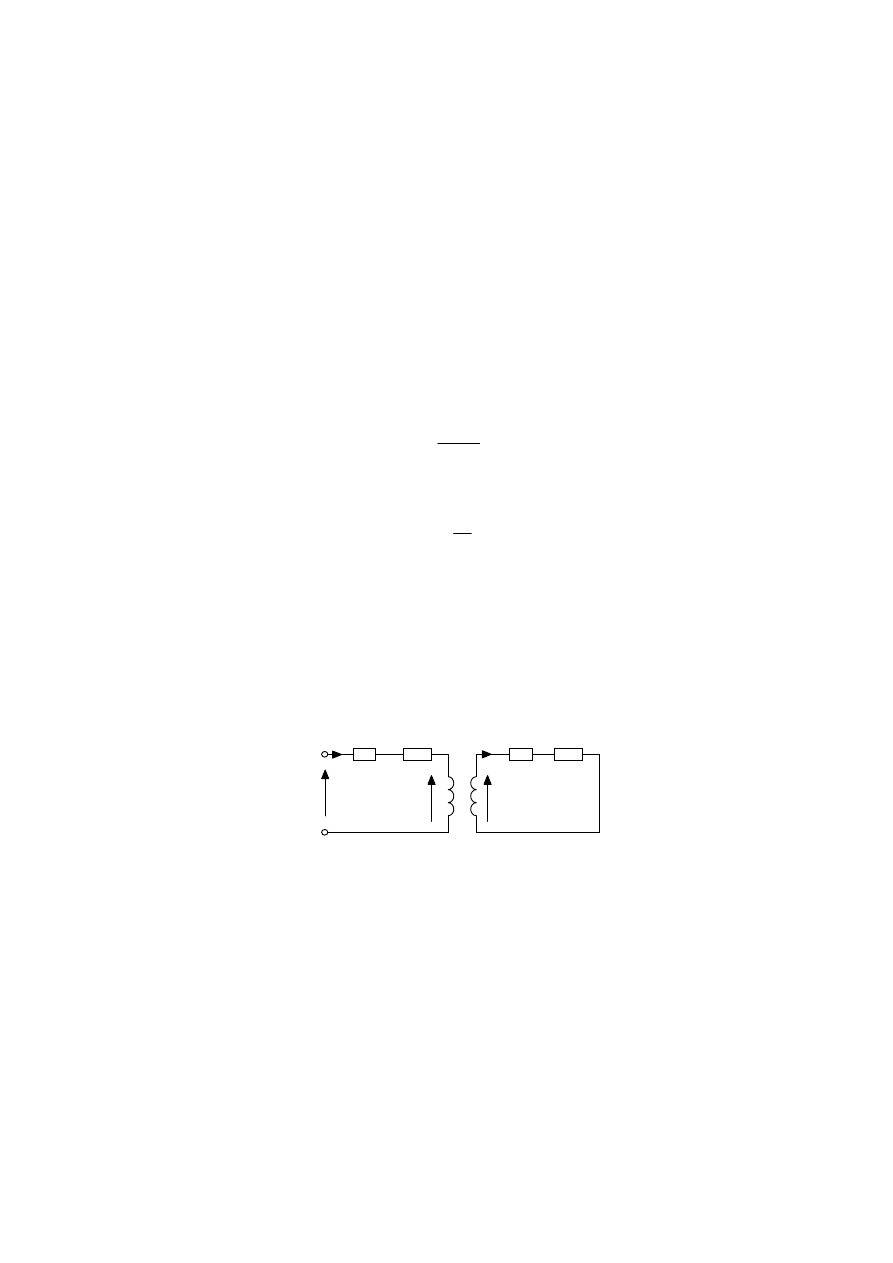
W pewnym sensie analiza pracy silnika indukcyjnego przypomina analizę pracy
transformatora. Biorąc pod uwagę podobne warunki pracy w każdej z trzech faz silnika, jego
schemat zastępczy można zatem uprościć do schematu jak na rysunku 1.3
1
R
1
I
20
sX
2
R
2
I
1
X
1
E
20
sE
s
f
s
f =s f
r
1
U
Rys. 1.3
Na rysunku 1.3 obwody stojana i wirnika są rozdzielone, tak jak ma to miejsce w
rzeczywistości. Obwody te pracują w dwóch różnych częstotliwościach fs i fr.
R1, R2 - to rezystancje uzwojeń stojana i wirnika, X1 i X2 to reaktancje rozproszenia faz
stojana i wirnika.
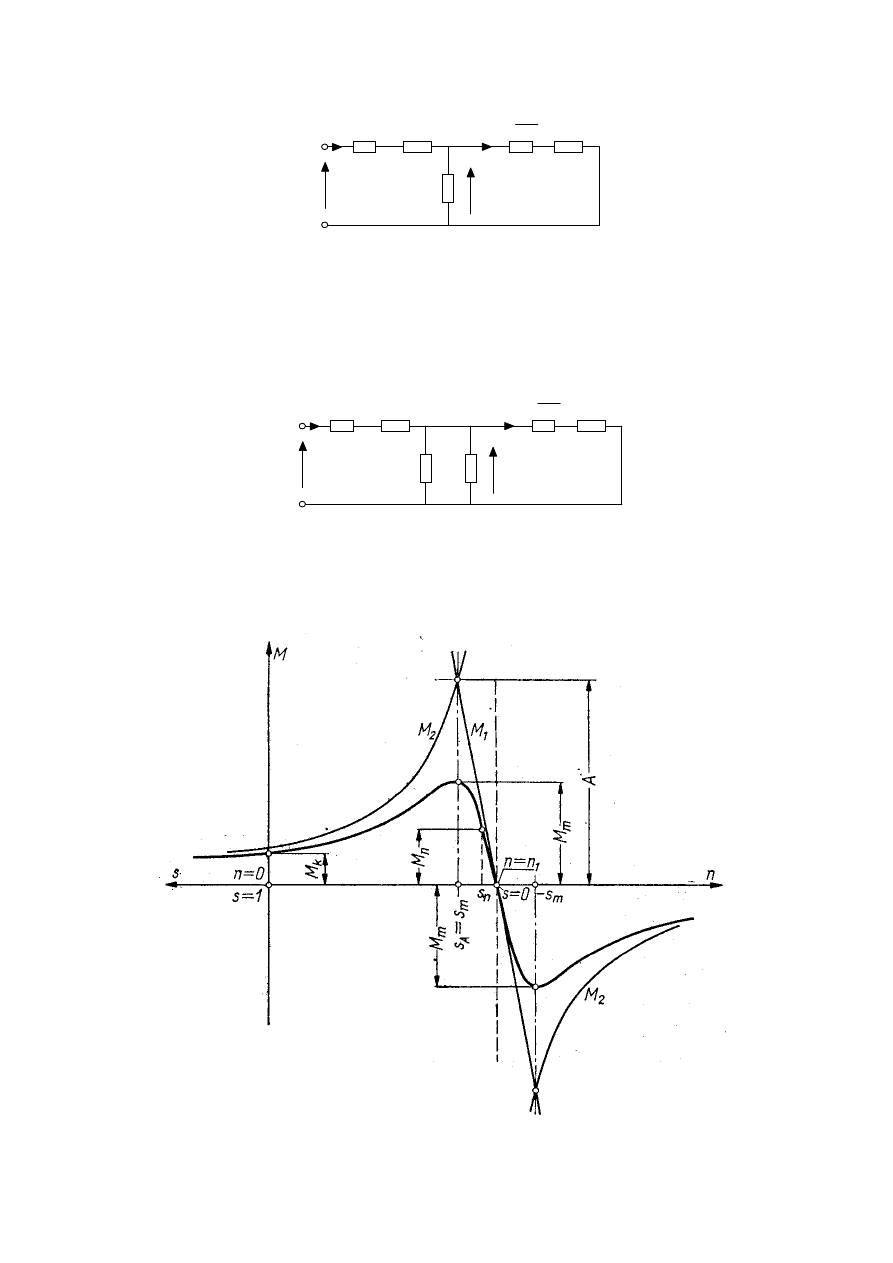
Obwód wirnika można jednak sprowadzić do obwodu zastępczego o częstotliwości fs jeżeli
podzieli się impedancję i napięcie przez poślizg. Po dokonaniu przeliczenia napięcia E20,
prądu I2 oraz impedancji wirnika na stronę stojana otrzymuje się obwód, w którym napięcia
E1 i E20 są ze sobą w fazie, wobec czego można połączyć obwody stojana i wirnika, tworząc
jeden czwórnik, jak na rysunku 1.4:
-
4
-
1
R
1
I
20
X'
2
R'
2
I'
1
X
1
=E
20
E'
s
f
1
U
s
µ
X
Rys. 1.4
Na reaktancji
X
µ
indukuje się napięcie E1, proporcjonalne do strumienia.
W układzie tym dodatkowo uwzględnić można straty w stali, wprowadzając do schematu
zastępczego RFE, równolegle do
X
µ
. (rys.1.5). W ten sposób straty w elemencie RFE są
proporcjonalne do napięcia E1, a więc do kwadratu indukcji magnetycznej.
1
R
1
I
20
X'
2
R'
2
I'
1
X
1
=E
20
E'
s
f
1
U
s
µ
X
Fe
R
Rys. 1.5
Na rysunku 1.6 przedstawiona została charakterystyka mechaniczna silnika indukcyjnego
wraz z przybliżonymi jej aproksymacjami.
Rys. 1.6 Charakterystyka mechaniczna silnika indukcyjnego
-
5
-
Z analizy teoretycznej wynika, że moment maszyny indukcyjnej wynosi:
M
C
R s
R
s X
=
+
2
2
2
2
20
2
(1)
gdzie:
C
m
U
u
=
2
1
1
2
ω ϑ
, przy czym m2 - liczba faz uzwojenia wirnika, ωu - przekładnia napięciowa
(stosunek napięć indukowanych przy nieruchomym wirniku), U1 – napięcie zasilające.
Ze wzoru (1) wynika, że przy bardzo małych poślizgach można w mianowniku pominąć
składnik reaktancyjny i otrzymuje się wtedy równanie liniowe:
M
CR s
R
=
2
2
2
(2)
Przy bardzo dużych poślizgach można w mianowniku pominąć składnik rezystancyjny i
otrzymuje się wtedy zależność hiperboliczną:
M
CR
sX
=
2
20
2
(3)
Przyrównując pochodną momentu po poślizgu z równania (1) do zera znajdujemy ekstremum
czyli tzw poślizg krytyczny. Wyznaczają go również punkty przecięcia aproksymacji (2) i (3)
(rys.1.6).
poślizgowi krytycznemu odpowiada moment maksymalny.
Stosunek dowolnego momentu do momentu maksymalnego maksymalnego może być
przedstawiony w postaci wzoru Klossa:
M
M
s
s
s
s
m
m
m
=
+
2
(4)
Moment obrotowy maszyny indukcyjnej jest proporcjonalny do kwadratu napięcia.
W pracującym silniku występuje moment obrotowy strat mechanicznych związany z tarciem
w łożyskach i wentylacją, co obniża wartość momentu użytecznego na wale silnika.
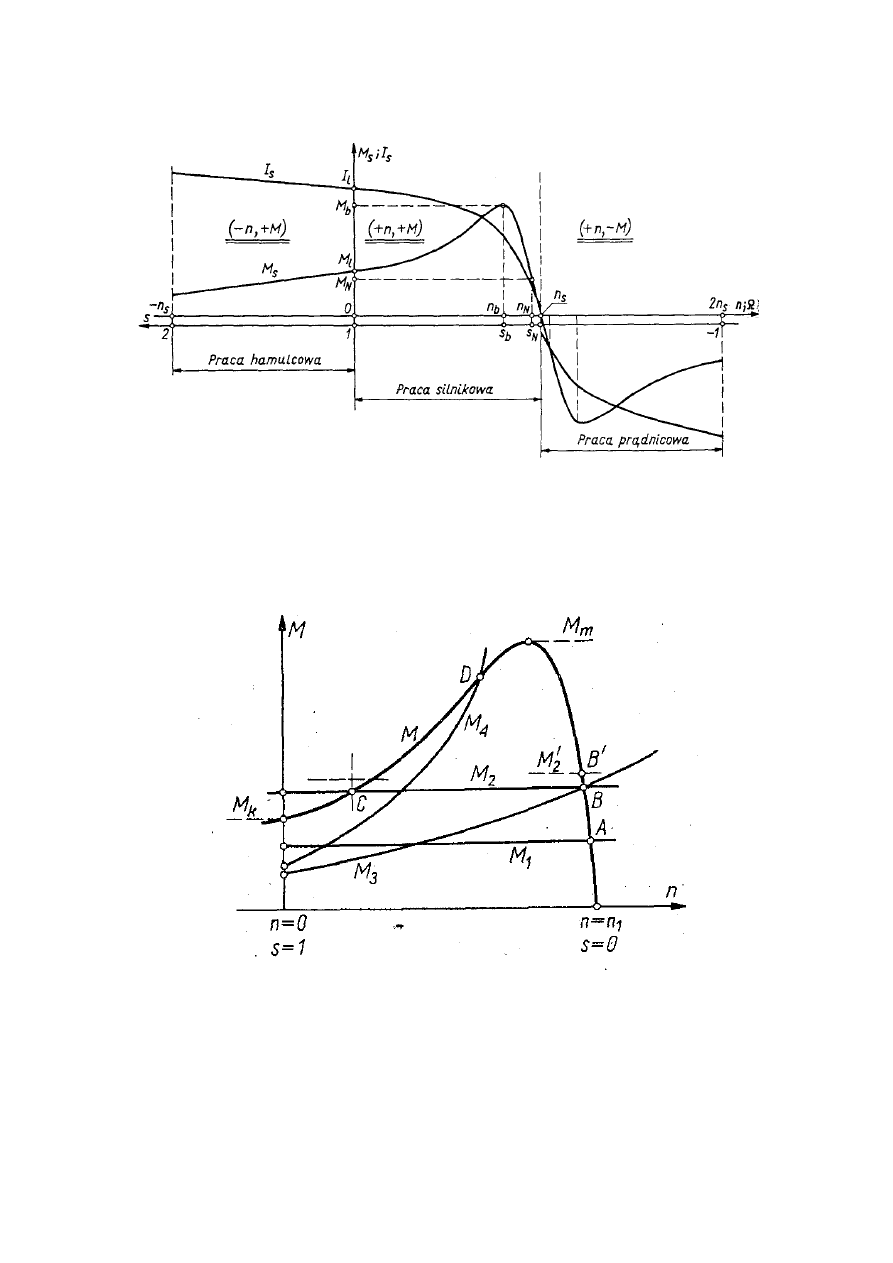
Na rysunku 1.7 jeszcze raz pokazana została charakterystyka mechaniczna silnika (moment w
funkcji prędkości i poślizgu) wraz z obszarami pracy maszyny:
- w zakresie 0<n<n
s
maszyna pracuje jako silnik: dodatnim wartościom momentu
odpowiadają dodatnie wartości prędkości,
- w zakresie n> n
s
maszyna pracuje jako prądnica: ujemnym wartościom momentu
odpowiadają dodatnie wartości prędkości,
- w zakresie n<0 maszyna pracuje jako hamulec: np gdy urządzenie sprzęgnięte z silnikiem
obraca się w lewo, a silnik włączony jest na obroty w prawo; moc hamowania i moc
pobierana z sieci zamieniana jest na ciepło w maszynie, przez M
s
oznaczono moment
elektromagnetyczny silnika, I
s
– prąd silnika.
-
6
-
Rys.1.7
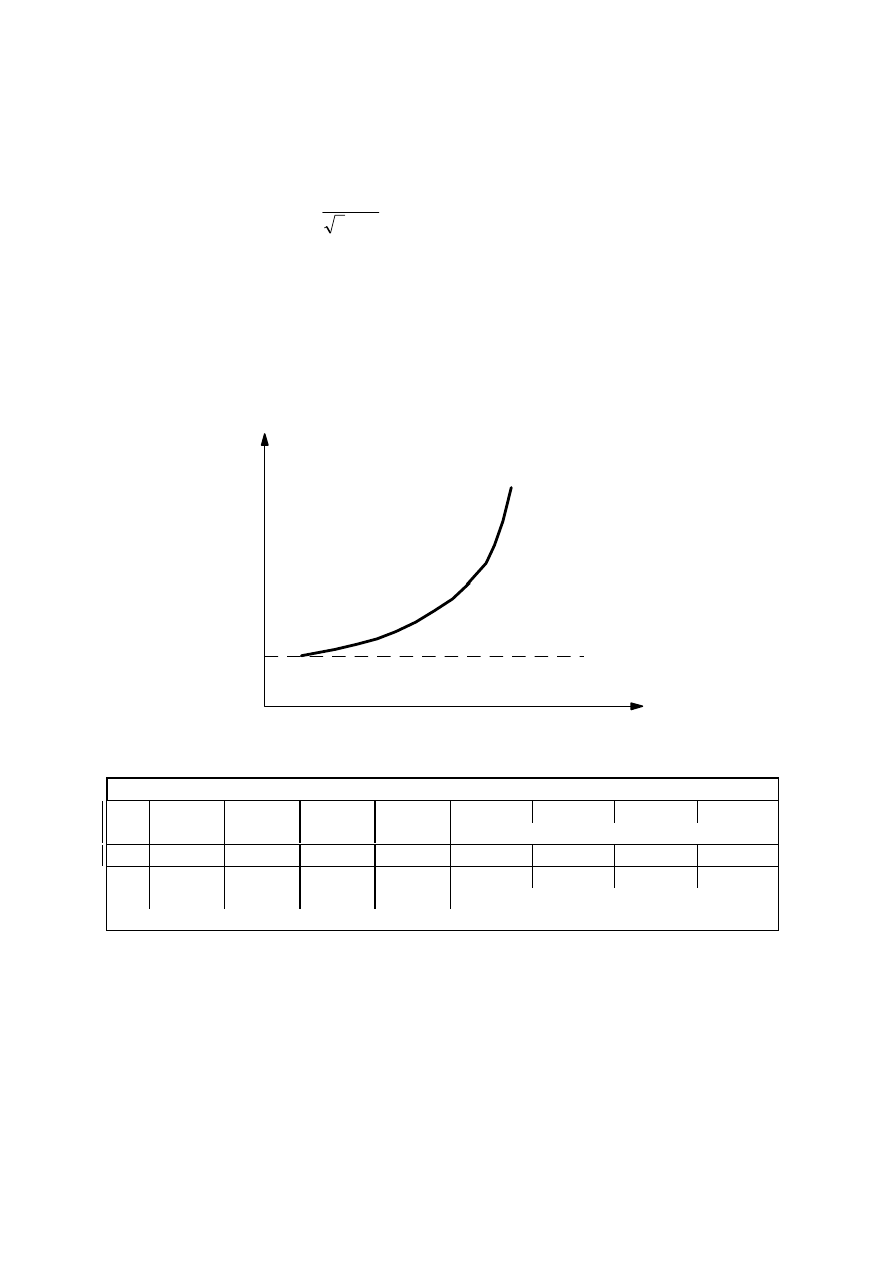
Jeżeli moment obciążenia silnika M1 w chwili włączenia go do sieci jest mniejszy od
początkowego momentu rozruchowego Mk (rys.1.8), to wirnik zaczynie się obracac w
kierunku wirowania pola magnetycznego.
Rys.1.8 Rozruch silnika indukcyjnego przy różnych momentach obciążenia
Gdy obciążenie nie zmienia się w całym zakresie prędkości, to prędkość wzrasta do wartości,
przy której moment obciążenia jest równy momentowi silnika, czyli do punktu przecięcia się
charakterystyki mechanicznej silnika i charakterystyki, obciążenia momentem Mi (punkt A).
Wzrost prędkości następuje w okresie rozruchu silnika, zgodnie z ogólnym równaniem
dynamiki:
-
7
-
M
M
J
d
dt
−
=
1
ϖ
Zatem, gdy M = Mi prędkość jest stała, a gdy M > Mi wirnik zwiększa prędkość.
Jeśli silnik pracuje już w punkcie A, a moment obciążenia wzrośnie do wartości M2, to
prędkość nieco się zmniejszy, poślizg wzrośnie i nowy stan pracy ustali się w punkcie B,
gdzie przecina się nowa charakterystyka obciążenia z charakterystyką mechaniczna silnika.
Jednak rozruch silnika przy stałym obciążeniu momentem M2 nie jest możliwy, gdyż przy
prędkości równej zeru Mk<M2; silnik tak obciążony nie dokona rozruchu, lecz pozostanie w
stanie zwarcia. Gdyby jednak silnik był obciążony np. momentem M3, to dokonałby
rozruchu, a jego prędkość ustaliłaby się w punkcie B. Warunkiem rozruchu jest wiec, aby w
całym zakresie prędkości od zera do wartości ustalonej, określonej wartością momentu
obciążenia, moment silnika był większy od momentu obciążenia.
Przy obciążeniu silnika stałym momentem M2 prosta M2 ma z krzywa momentu silnika dwa
wspólne punkty: B i C (rys.1.7). Punkt -B jest punktem pracy stabilnej, gdyż w razie
jakiejkolwiek chwilowej zmiany charakterystyki silnika lub obciążenia układ wróci ponownie
do pracy w punkcie B, jeżeli zniknie przyczyna .zmiany charakterystyki.
Jeśli np. moment obciążenia chwilowo wzrośnie do wartości M'2 to wirnik zostanie
przyhamowany, moment silnika wzrośnie i nowy stan pracy ustali się w punkcie B'. Jeśli
moment obciążenia. z powrotem zmniejszy się do wartości M'2 to prędkość wzrośnie,
moment silnika zmniejszy się i układ powróci do pracy w punkcie B.
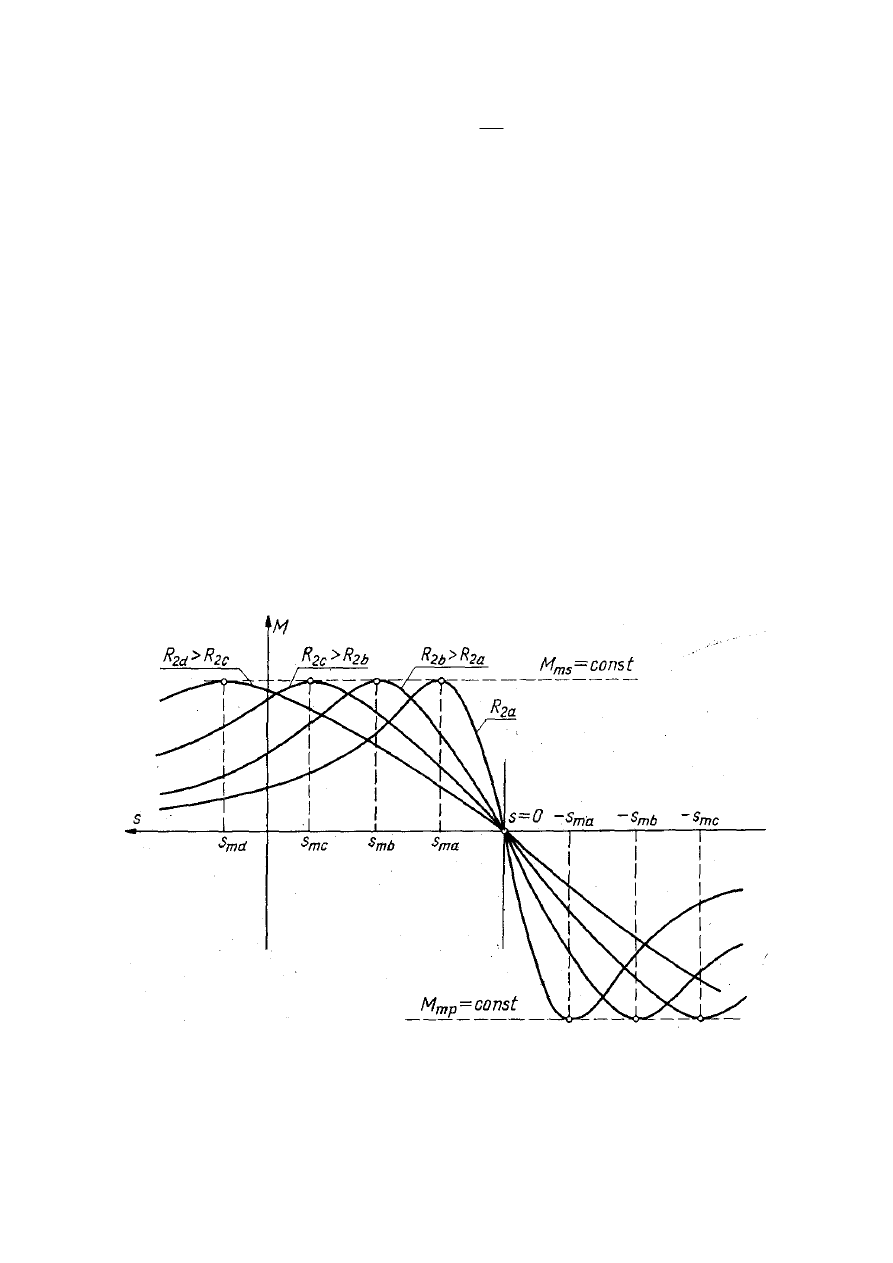
Na rysunku 1.9 pokazany został wpływ rezystancji obwodu wirnika na przebieg
charakterystyki mechanicznej maszyny indukcyjnej.
Rys.1.9
Moment obrotowy maszyny indukcyjnej jeśli proporcjonalny do kwadratu napięcia. Jeśli więc
napięcie sieci obniży się np. o 20% czyli gdy wyniesie ono 0,8Un wówczas moment będzie
miał 0,82 =0,64 wartości przy napięciu znamionowym. W tej proporcji zmniejsza się wartości
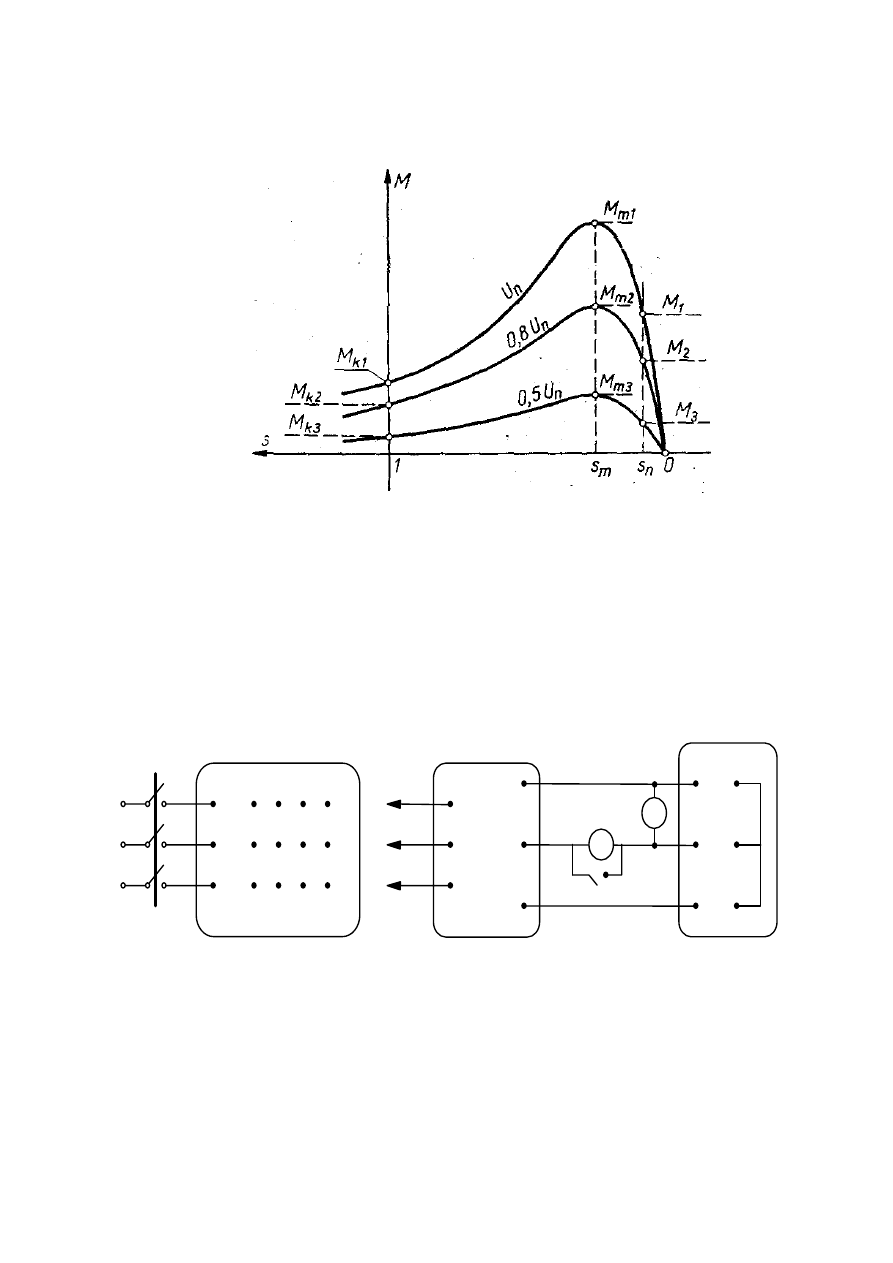
-
8
-
momentów przy wszystkich prędkościach, a więc również; moment rozruchowy, moment
maksymalny i moment przy poślizgu znamionowym (rys.1.10).
Rys.1.10 Wpływ napięcia na charakterystykę mechaniczną maszyny indukcyjnej
2. Opis stanowiska badawczego i przeprowadzania pomiarów
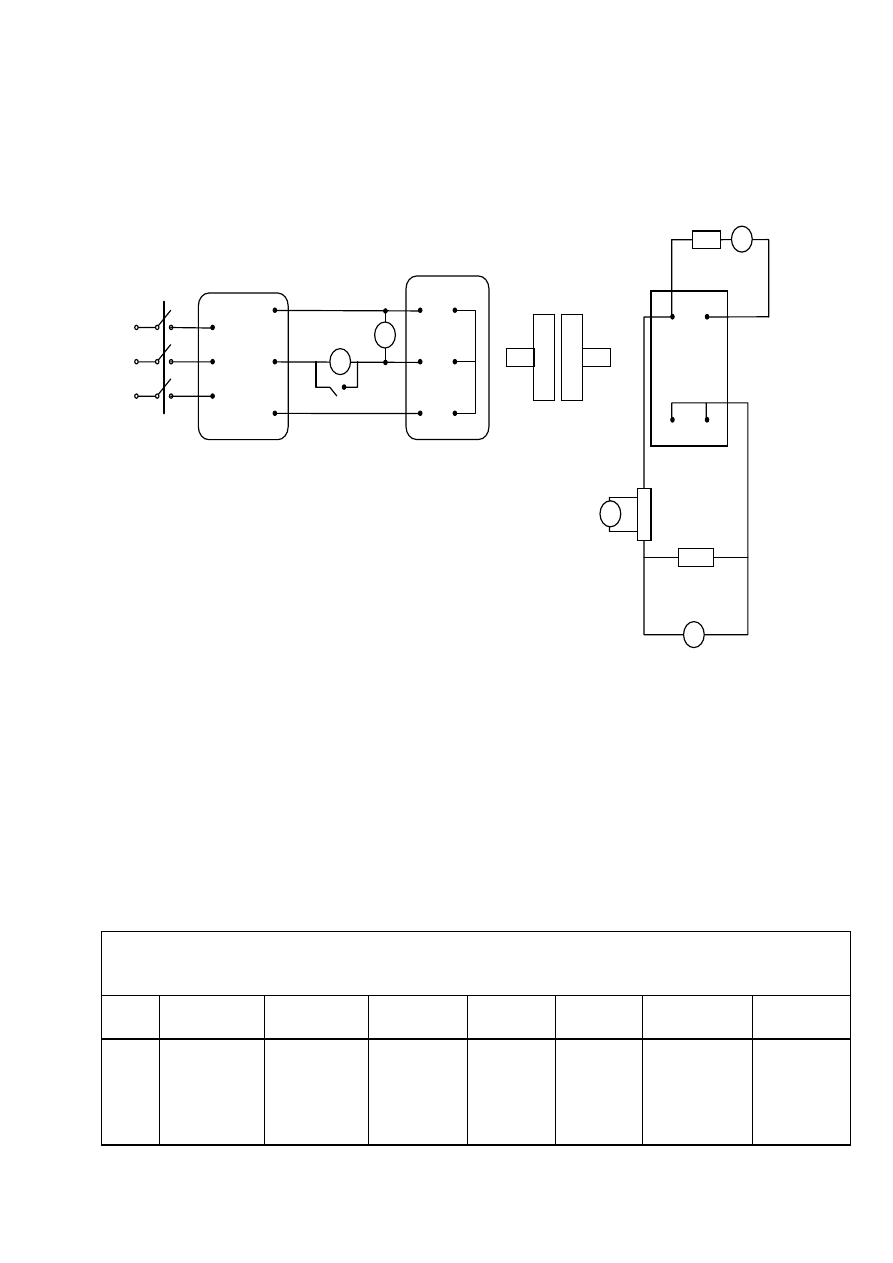
Stanowisko laboratoryjne (rysunek 2.3) do badania silnika klatkowego składa się:
a) zespołu silnik asynchroniczny klatkowy - prądnica prądu stałego (obcowzbudna), b)
zespołu oporów obciążenia prądnicy prądu stałego, c) obwodu regulacji wzbudzenia
prądnicy, c) części pomiarowej.
R
S
T
V
TRANSFORMATOR
WATOMIERZ 3faz
R'
S'
T'
A
k
SILNIK
U
w
V
Z
Y
X
Rys.2.1 Obwód do pomiaru charakterystyk biegu jałowego silnika klatkowego. V -
woltomierz do pomiaru napięcia międzyfazowego U
s
, A - amperomierz do pomiaru prądu
fazowego silnika, W - watomierz do pomiaru mocy czynnej silnika.
a) Dane znamionowe
Na podstawie tabliczek znamionowych znajdujących się na badanych maszynach
należy wpisać do protokołu badań następujące dane znamionowe:
Silnik
Prądnica
-
9
-
Typ ............................
Typ ............................
P
n
..............................
P
n
..............................
n
n
............................... n
n
...............................
U
n
.............................
U
n
.............................
I
n
...............................
I
n
...............................
cos
ϕ
n
.........................
b) Wyznaczanie rezystancji uzwojeń i rezystancji izolacji silnika klatkowego
Przy odłączonym od zasilania silniku dokonujemy przy pomocy mostka, pomiaru wartości
rezystancji pomiędzy zaciskami.
U – z
R = .................
Ω
V – x
R = .................
Ω
W – y
R = .................
Ω
Następnie obliczamy wartość średnią rezystancji uzwojenia silnika:
R
ŚR
= .................
Ω
Pomiaru rezystancji izolacji dokonujemy miernikiem izolacji lub induktorem przy
odłączonym zasilaniu silnika. Jako napięcie pomiarowe U
p
= 1000V przyłożone na przeciąg
1 minuty. Rezystancję izolacji należy przyjąć za wystarczającą, gdy jej wartość:
R
iż
> 1 M
Ω
c) Badanie pracy silnika w stanie jałowym, wyznaczanie strat w żelazie i strat
mechanicznych
-
Sprawdzić czy obwód wzbudzenia prądnicy prądu stałego jest otwarty.
-
Sprawdzić czy obwód napięciowy watomierza przełączony jest na zakres 520 V.
-
Załączyć napięcie na tablicy zasilającej.
Układ wzbudzenia prądnicy prądu stałego wyłączony. Po załączeniu zacisków R S T silnika
do zacisków transformatora na napięcie 380V i zwarciu amperomierza (w celu jego ochrony
na czas rozruchu) załączyć napięcie w tablicy zasilającej. Po zakończeniu rozruchu silnika
(kilka do kilkunastu sekund) załączyć amperomierz na właściwy zakres w celu pomiaru prądu
silnika.
Odczytać z mierników następujące wielkości: napięcie zasilania silnika U
s1
, prąd zasilania
silnika I
s1
, moc czynną pobieraną przez silnik P
cz1
, obroty silnika ns. Wyłączyć tablicę
zasilającą.
W celu wyznaczenia kolejnych punktów pomiarowych należy powtórzyć powyższą
sekwencję czynności, przełączając (przy wyłączonej tablicy zasilającej!) kolejno zaciski R
S T silnika na odpowiednie zaciski transformatora (zmiana napięcia).
Tabela 1
Pomiary
Lp
n
U
o
I
o
P
o
obr/min
V
A
W
-
10
-
Obliczenia:
U
o
=
U
s1
- napięcie międzyfazowe silnika [V], I
o
= I
s1
- prąd fazowy silnika [A]
P
o
=
P
cz1
- moc czynna pobierana przez silnik [W] (liczbę działek wskazywanych przez
watomierz Wat-1 mnożymy przez 60);
współczynnik mocy:
cos
φ
0
0
0 0
3
=
P
U I
;
składowa czynna biegu jałowego: I
czo
=I
o*
cos
ϕ
o
;
składowa bierna: I
bo
= I
o*
sin
ϕ
o
;
straty w uzwojeniach stojana silnika: P
cuo
P
cuo
=3*I
o
2
*R
s
;
straty jałowe:
Cu
P
P
P
∆
−
=
∆
0
0
rozdział strat jałowych na straty w żelazie
Fe
P
∆
i straty mechaniczne
m
P
∆ :
Pm
P
P
Fe
∆
+
∆
=
∆
0
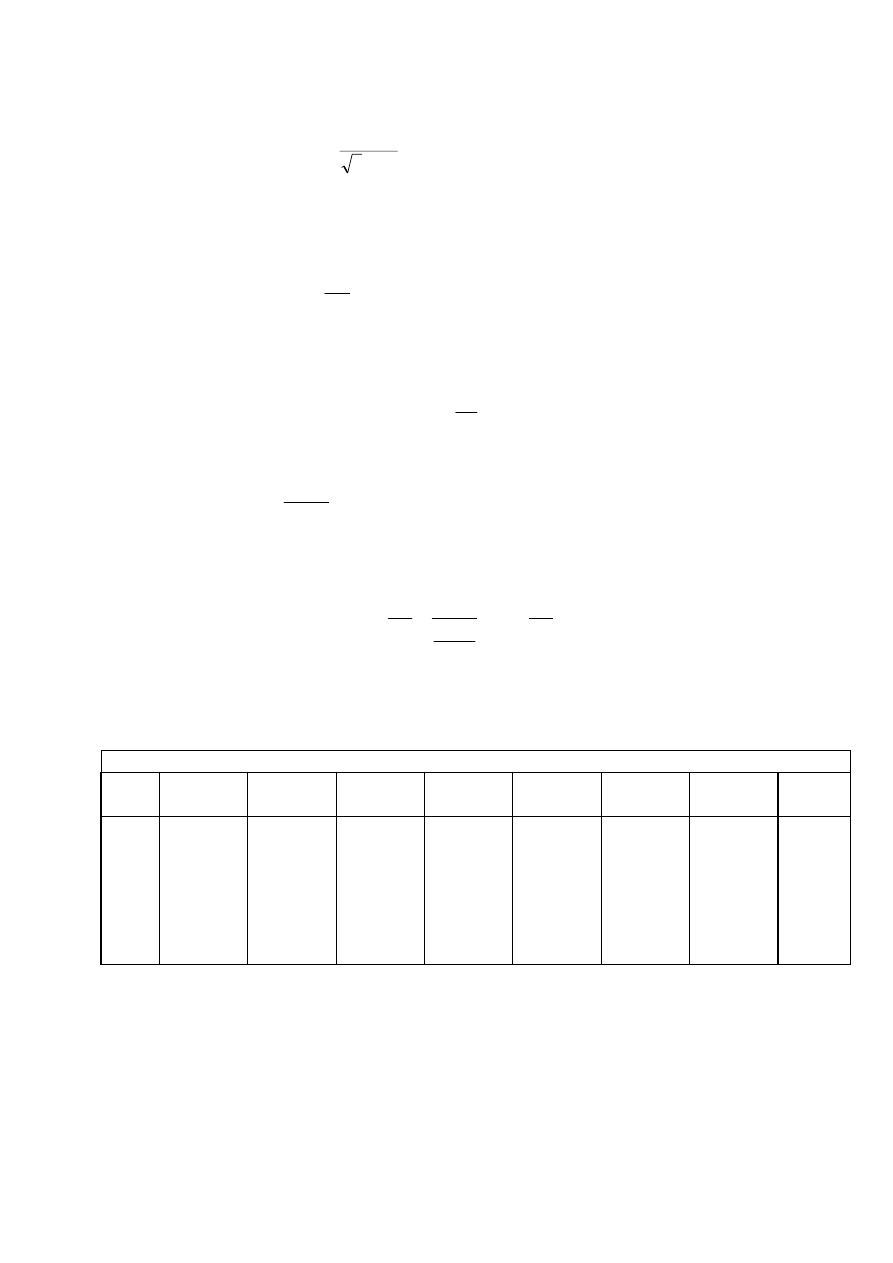
Należy wykreślić , ekstrapolując otrzymaną prostą do napięcia U=0. Otrzymuje się w ten
sposób na osi strat wartość strat mechanicznych
m
P
∆ .
∆ P
0
∆ P
m
∆ P
Fe
U
2
Rys.2.2 Wyznaczanie strat mechanicznych
Tabela 2
Obliczenia
Lp
cos
ϕ
o
sin
ϕ
o
I
czo
I
bo
∆P
m
∆P
Fe
∆P
cu
∆P
0
A
A
W
W
W
W
Narysować charakterystyki U
o
=f(f
s
); I
czo
=f(f
s
); porównać moc P
cuo
ze wskazaniami watomierza.
Narysować charakterystyki: P
0
= f(U
0
); I
0
= f(U
0
); I
cz0
= f(U
0
); I
b0
= f(U
0
); P
0
= f(U
0
2
).
d) Badanie pracy silnika w stanie obciążenia
Po załączeniu zacisków R S T silnika bezpośrednio do sieci trójfazowej z tablicy zasilającej
(380V). Po zwarciu amperomierza załączyć napięcie w tablicy zasilającej. Po zakończeniu
rozruchu silnika załączyć amperomierz na właściwy zakres w celu pomiaru prądu silnika.
Zamknąć układ wzbudzenia prądnicy prądu stałego poprzez załączenie stycznika S1
-
11
-
(załączenie obwodu regulacji wzbudzenia prądnicy). Poprzez regulację prądu wzbudzenia
prądnicy (potencjometrem suwakowym) obciążyć silnik tak aby watomierz wskazywał moc
4500W (nominalnie).
R
S
T
V
WATOMIERZ 3faz
R'
S'
T'
A
k
SILNIK
U
w
V
Z
Y
X
V
A
A
H
A
F
E
R
ob
R
w
I
w
I
p
V
p
SPRZĘGŁO
Rys.2.3 Obwód do pomiaru charakterystyk obciążenia silnika klatkowego.
Odczytać z mierników następujące wielkości:
I
s
- prąd fazowy silnika [A];
U
s
- napięcie międzyfazowe silnika [V];
P
cz
- moc czynna pobierana przez silnik [W];
n - obroty silnika;
I
p
-
prąd w obwodzie wzbudzenia prądnicy prądu stałego, napięcie na prądnicy;
U
p
–
napięcie otrzymywane z prądnicy prądu stałego.
Odczytywać kolejne pomiary zmniejszając kolejno moc P
s
poprzez regulację prądu w obwodzie
wzbudzenia prądnicy prądu stałego.
Odczytujemy z mierników poprzednio określone wielkości. Wyniki zapisujemy w tabeli 3.
Tabela 3
Pomiary
Lp
I
s1
U
s1
P
cz
U
p
I
p
f
s
n
s
-
12
-
Obliczenia:
współczynnik mocy:
s
s
ob
I
U
P
3
cos
0
=
φ
,
składowa czynna biegu jałowego: I
cz
=I
s*
cos
ϕ ;
składowa bierna: I
b
= I
s1*
sin
ϕ,
moc oddawana przez prądnicę: P
p
=I
p
*U
p.
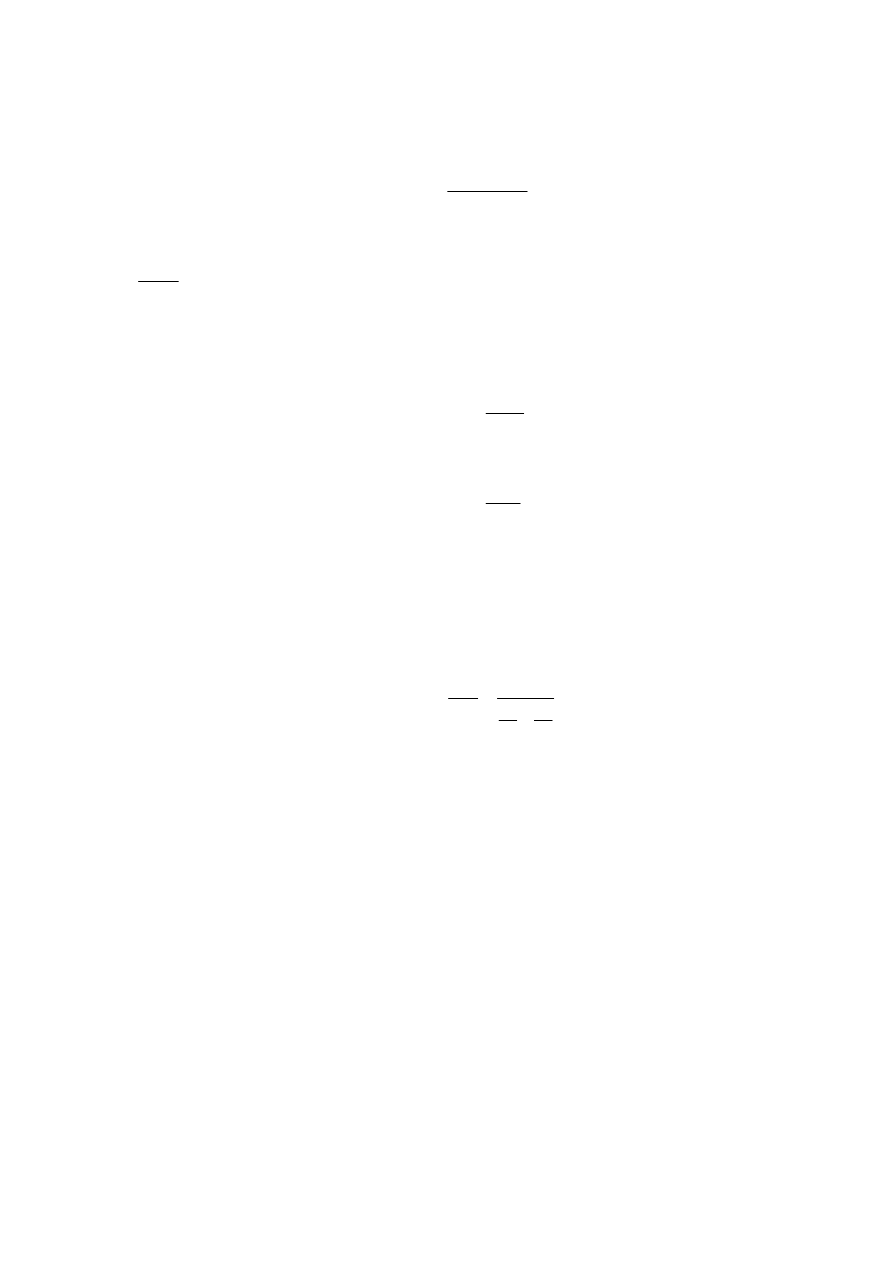
stosunek mocy oddawanej przez prądnicę do jej mocy znamionowej – odczytanej z tabliczki
znamionowej - 2.8 kW):
np
p
P
P
=
α
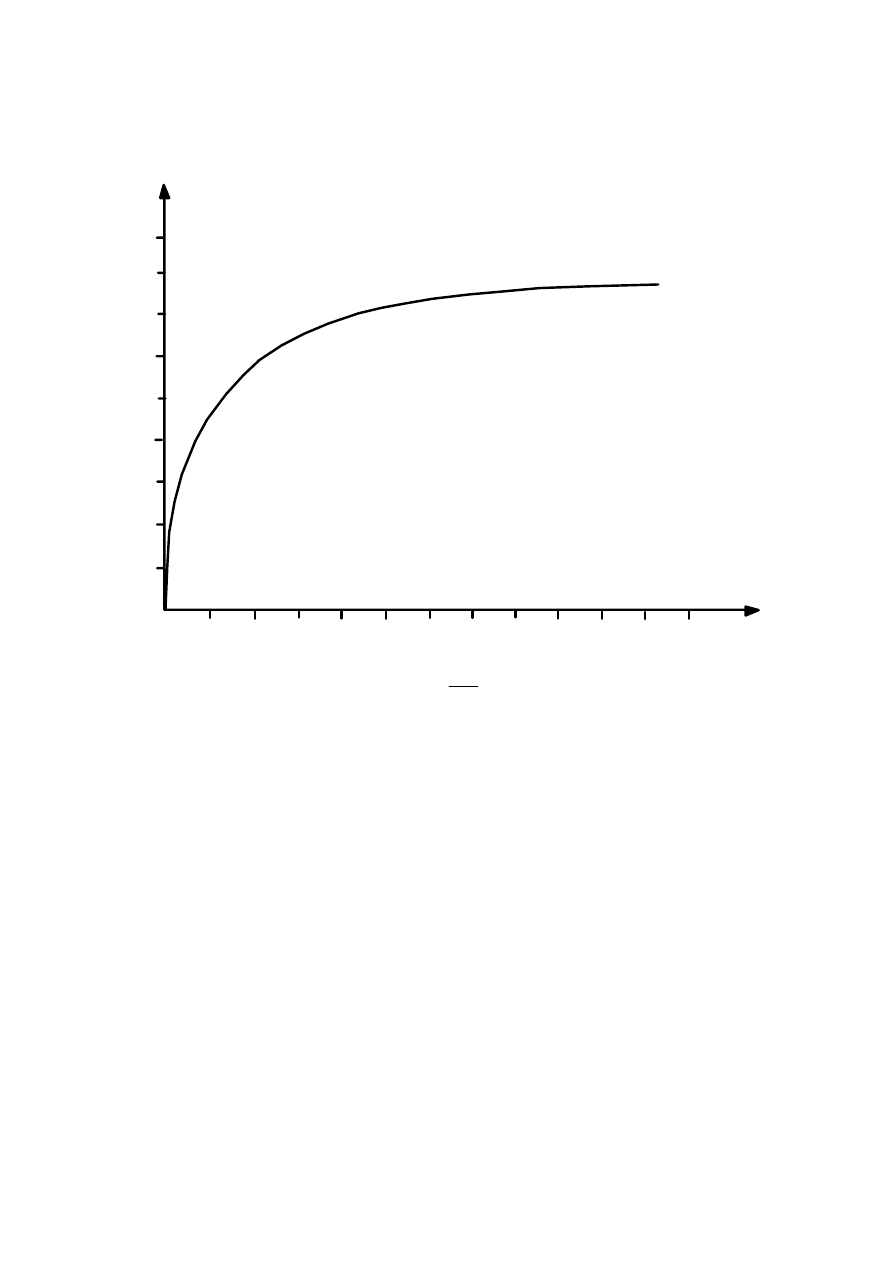
Z wykresu sprawności prądnicy
η
pr
=f(
α) (rys2.4) odczytać sprawność prądnicy w danym
punkcie pomiarowym.
Obliczyć moc użyteczną dostarczoną przez silnik do prądnicy:
p
p
uż
P
P
η
=
Sprawność silnika w danym punkcie pomiarowym (punkcie pracy):
η
s
= P
uż
/ P
s
Poślizg silnika:
%
100
⋅
−
=
s
s
n
n
n
s
,
gdzie n
s
=prędkość obrotowa synchroniczna
(1500obr/min).
Moment przekazywany przez silnik indukcyjny prądnicy:
n
P
n
P
P
M
uż
uż
uż
uż
55
,
9
60
2
=
⋅
=
=
π
ϖ
Straty w uzwojeniach stojana silnika
∆P
cu
=3* I
s
2
*R
s
.
Tabela 4
Obliczenia
Lp
P
r
α
η
pr
η
s
cos
ϕ
s
M
uż
P
cuo
Narysować charakterystyki sprawności silnika
η
s
= f(M
uż
);
− Sprawność silnika η
s
= f(M
uż
)
− współczynnika mocy cosϕ
ob.
= f(M
uż
)
− poślizgu s = f(M
uż
)
− prądu silnika I
s
= f(M
uż
)
−obrotów n = f(M
uż
)
− mocy pobieranej z sieci P
s
= f(M
uż
)
-
13
-
− mocy użytecznej P
uż
= f(M
uż
)
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
η
pr
0.2
0.1
0.3 0.4
0.6
0.5
0.7 0.8
1.0
0.9
1.1
α =
P
P
pr
n
Rys.2.4 Charakterystyka sprawności prądnicy.
3. Pytania kontrolne
1. Budowa silnik indukcyjnego klatkowego, sposoby połączeń
2. Schemat zastępczy
3. Charakterystyki mechaniczne silnika
4. Sposoby rozruchu silnika indukcyjnego
5. Schematy pomiarowe i przebieg prób silnika
_______________________________________________________________________
Literatura
1. Stefan Piątek, Aleksander Staszewski – Laboratorium maszyn elektrycznych. Skrypt PW,
str 242–255.
2. Władysław Latek – Maszyny elektryczne tom I. skrypt PW
3. Antoni Plamitzner – Maszyny elektryczne.PWN
Wyszukiwarka
Podobne podstrony:
Badanie indukcyjnego silnika pierscieniowego v4, LABORATORIUM MASZYN ELEKTRYCNYCH
FIZYKA Siła elektrodynamiczna, indukcja, silnik
Badanie indukcyjnego silnika pierścieniowego, LABORATORIUM MASZYN ELEKTRYCNYCH
BADANIE INDUKCYJNEGO SILNIK, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, naped elekt
Badanie indukcyjnego silnika pierścieniowego v6
Wyznaczanie charakterystyk indukcyjnego silnika pierścieniowego, Elektrotechnika, Napędy
Badanie maszyn indukcyjnych silnik klatkowy i pierścieniowy
Badanie indukcyjnego silnika pierścieniowego
wyznaczanie ch k indukcyjnego silnika pierścieniowego protokoli
ćw.6.Wyznaczanie charakterystyk indukcyjnego silnika pierścieniowego2, Elektrotechnika - notatki, sp
Wyznaczanie charakterystyk indukcyjnego silnika pierścieniowego, Elektrotechnika, Napędy
Rozruch silnik�w 3faz
Wyznaczanie charakterystyk indukcyjnego silnika pierścieniowego, Politechnika Lubelska
Badanie indukcyjnego silnika pierścieniowego v2, LABORATORIUM MASZYN ELEKTRYCNYCH
Badanie indukcyjnego silnika pierścieniowego v4, 1
00526 Indukcja EM D part 1 2008 Indukcja EM, Indukcyjność L, silniki(1)
więcej podobnych podstron