Przestrzenie Metryczne
Definicja
Niech X - zbór, X
≠∅
Metryką
(odległością) w zbiorze X nazywamy funkcję d :
(M0)
d : X
× X [ 0, ∞
(nieujemność)
o własnościach:
(M1)
∀ x , y∈ X :
d
x , y=0 ⇔ x= y
(M2)
∀ x , y∈ X :
d
x , y=d y , x
(symetria)
(M3)
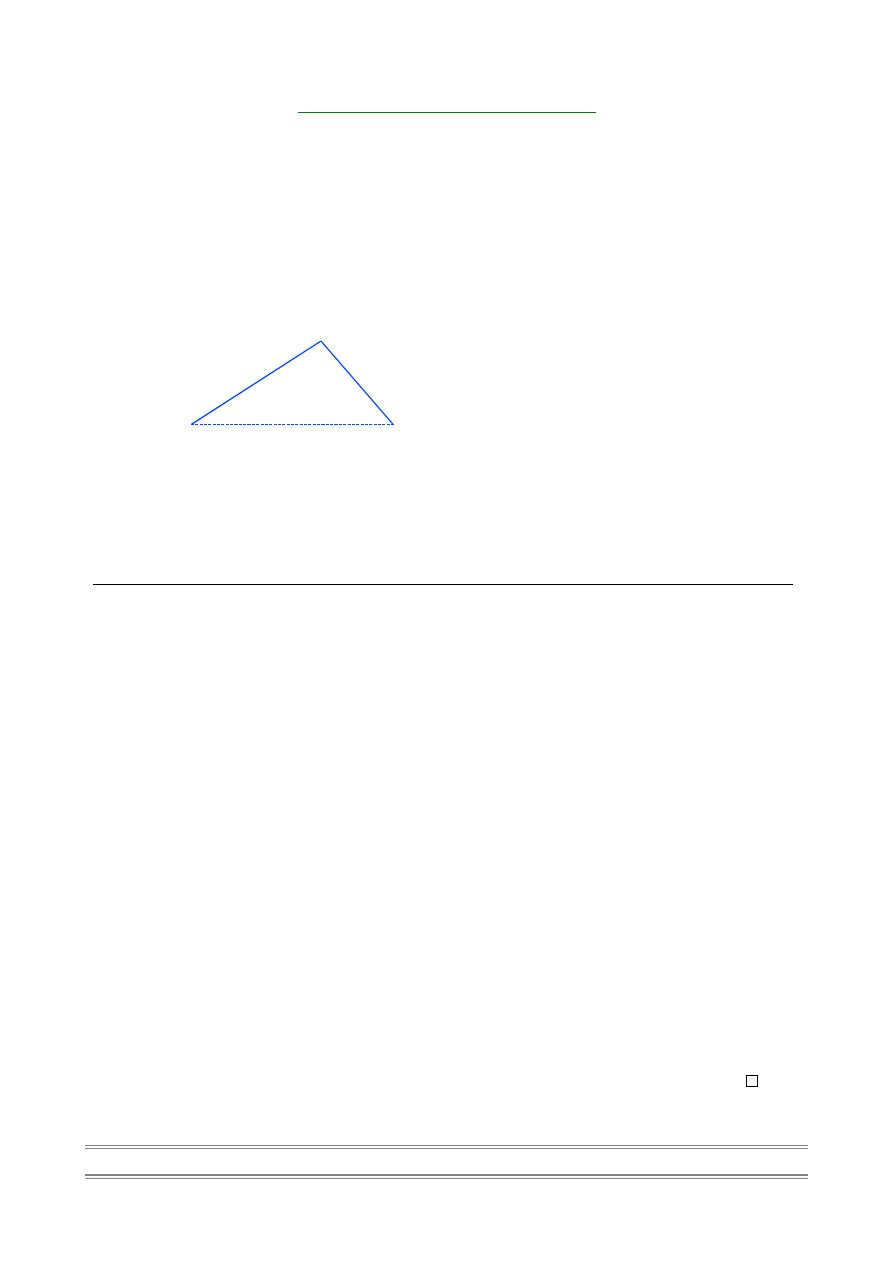
∀ x , y , z∈ X : d x , y≤d x , zd z , y
(warunek trójkąta)
Parę
X , d
nazywamy
przestrzenią metryczną
.
Uwaga
(M1)
⇔[∀ x∈ X d x , x=0 ∧∀ x , y∈ X d x , y=0 ⇒ x= y]
Przykłady
przestrzeni metrycznych
1)
Przestrzeń dyskretna
X , d
01
d
01
x , y≔
{
0, gdy x
= y
1, gdy x
≠ y
d
01
-
metryka dyskretna
(zero-jedynkowa)
Sprawdzamy, że funkcja d
01
jest metryką, tzn. jest dobrze określona i spełnia warunki
(M0)-(M3).
Dowód
(M0)-(M2) wynikają z definicji d
01
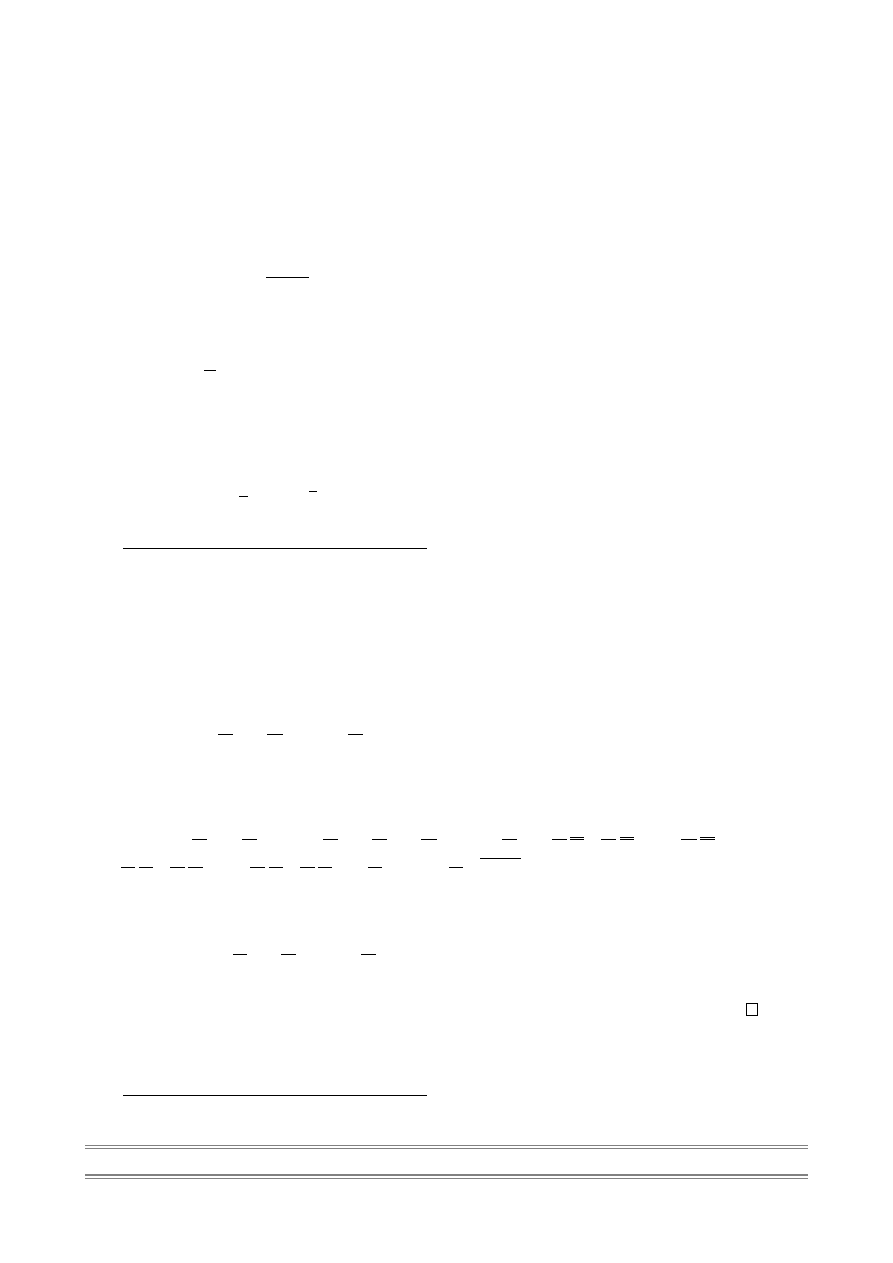
(M3)
1. x
= y
L
=d x , y=0
P
≥0
}
⇒ L≤P
2. x
≠ y L=d
01
x , y=1
x
=z≠ y
P
=d
01
x , zd
01
z , y=0 1 =1
y
=z≠x
P
=d
01
x , zd
01
z , y=1 0 =1
y
≠z≠x
P
=d
01
x , zd
01
z , y=1 1 =2
}
⇒ P≥1
⇒ L≤P
Wykład dr Joanny Górskiej
strona 1 z 22
Opracowali: Robert Pałka, Michał Pawłowski
x
z
y
d(z,y)
d(x,z)
d(x,y)
}
2) Jednowymiarowa
przestrzeń euklidesowa
ℝ , d
E
X
=ℝ
d
E
x , y≔∣x− y∣
dla x , y
∈ℝ
Funkcja d
E
jest metryką.
Dowód
(M0)-(M2) wynikają z definicji wartości bezwzględnej
(M3) d
E
x , y=∣x− y∣=∣x−zz− y∣≤∣x−z∣∣z− y∣=d
E
x , zd
E
z , y
3) n – wymiarowa
przestrzeń euklidesowa
ℝ
n
, d
E
Niech x , y
∈ℝ
n
x
= x
1
, x
2
,... , x
n
y
= y
1
, y
2
,... , y
n
d
E
x , y≔
∑
i
=1
n
x
i
− y
i
2
dla x , y
∈ℝ
n
d
E
-
metryka euklidesowa
Sprawdzamy, że funkcja d
E
jest metryką.
Dowód
(M0) d
E
x , y=
∑
i
=1
n
x
i
− y
i
2
≥0, bo
≥0
(M1) d
E
x , y=
∑
i
=1
n
x
i
− y
i
2
=0 ⇔
∑
i
=1
n
x
i
− y
i
2
=0 ⇔∀ i=1,2 ,, n : x
i
− y
i
2
=0 ⇔
⇔∀ i=1,2 ,, n: x
i
= y
i
⇔ x= y
(M2) d
E
x , y=
∑
i
=1
n
x
i
− y
i
2
=
∑
i
=1
n
y
i
−x
i
2
=d
E
y , x
(M3)
d
E
2
x , y=
∑
i
=1
n
x
i
− y
i
2
=
∑
i
=1
n
[ x
i
−z
i
z
i
− y
i
]
2
=
=
∑
i
=1
n
[ x
i
−z
i
2
2 x
i
−z
i
z
i
− y
i
z
i
− y
i
2
]=
=
∑
i
=1
n
x
i
−z
i
2
∑
i
=1
n
z
i
− y
i
2
2
∑
i
=1
n
x
i
−z
i
z
i
− y
i
Korzystając z nierówności Cauchy'ego:
∑
i
=1
n
x
i
−z
i
z
i
− y
i
≤
∑
i
=1
n
x
i
−z
i
2
∑
i
=1
n
z
i
− y
i
2
otrzymujemy
d
E
2
x , y≤
∑
i
=1
n
x
i
−z
i
2
∑
i
=1
n
z
i
− y
i
2
2
∑
i
=1
n
x
i
−z
i
2
∑
i
=1
n
z
i
− y
i
2
=
∑
i
=1
n
x
i
−z
i
2
∑
i
=1
n
z
i
− y
i
2
2
=d
E
x , zd
E
z , y
2
zatem
d
E
x , y≤d
E
x , zd
E
z , y
Wykład dr Joanny Górskiej
strona 2 z 22
Opracowali: Robert Pałka, Michał Pawłowski
4) Przestrzeń ℝ
n
z
metryką taksówkową
ℝ
n
, d
T
X
=ℝ
n
d
T
x , y≔
∑
i
=1
n
∣x
i
− y
i
∣ dla x , y∈ℝ
n
d
T
-
metryka taksówkowa
Sprawdzamy, że funkcja d
T
jest metryką.
Dowód
(M0) d
T
x , y=
∑
i
=1
n
∣x
i
− y
i
∣≥0 (z własności wartości bezwzględnej)
(M1) d
T
x , y=
∑
i
=1
n
∣x
i
− y
i
∣=0 ⇔∀ i : ∣x
i
− y
i
∣=0 ⇔∀ i : x
i
= y
i
⇔ x= y
(M2) d
T
x , y=
∑
i
=1
n
∣x
i
− y
i
∣=
∑
i
=1
n
∣y
i
−x
i
∣=d
T
y , x
(M3)
d
T
x , y=
∑
i
=1
n
∣x
i
− y
i
∣=
∑
i
=1
n
∣x
i
−z
i
z
i
− y
i
∣≤
∑
i
=1
n
∣x
i
−z
i
∣∣z
i
− y
i
∣=
=
∑
i
=1
n
∣x
i
−z
i
∣
∑
i
=1
n
∣z
i
− y
i
∣=d
T
x , zd
T
z , y
Zatem
d
T
x , y≤d
T
x , zd
T
z , y
5)
ℝ
n
z metryką d
T
(
uogólnienie metryki taksówkowej
)
ℝ
n
, d
T
X
=ℝ
n
c
i
=const , c
i
∈ℝ ,i=1, 2 ,... , n
d
T
x , y≔
∑
i
=1
n
c
i
∣x
i
− y
i
∣ dla x , y∈ℝ
n
6)
ℝ
n
z
metryką maksimum
d
max
ℝ
n
, d
max
X
=ℝ
n
d
max
x , y≔ max
i
=1, 2 ,... , n
{∣x
i
− y
i
∣} dla x , y∈ℝ
n
d
max
-
metryka maksimum
Sprawdzamy, że funkcja d
max
jest metryką.
Dowód
(M0) d
max
x , y= max
i
=1, 2 ,... , n
{∣x
i
− y
i
∣}≥0 (z własności wartości bezwzględnej)
(M1) d
max
x , y= max
i
=1, 2 ,... , n
{∣x
i
− y
i
∣}=0 ⇔∀ i : ∣x
i
− y
i
∣⇔ x= y
(M2) d
max
x , y= max
i
=1, 2 ,... , n
{∣x
i
− y
i
∣}= max
i
=1, 2 ,... , n
{∣y
i
−x
i
∣}=d
max
y , x
(M3) d
max
x , y= max
i
=1, 2 ,... , n
{∣x
i
− y
i
∣}
∀ k=1, 2 ,, n
∣x
k
− y
k
∣=∣x
k
−z
k
z
k
− y
k
∣≤∣x
k
−z
k
∣∣z
k
− y
k
∣
oraz
∀ k=1, 2 ,, n
∣x
k
−z
k
∣≤max {∣x
i
−z
i
∣}=d
max
x , z
i
∣z
k
− y
k
∣≤max {∣z
i
− y
i
∣}=d
max
z , y
Stąd
∀ k=1, 2 ,, n
∣x
k
− y
k
∣≤d
max
x , zd
max
z , y
Zatem d
max
x , y≤d
max
x , zd
max
z , y
Wykład dr Joanny Górskiej
strona 3 z 22
Opracowali: Robert Pałka, Michał Pawłowski

7) Przestrzeń odwzorowań ciągłych z
metryką Czebyszewa
C [a , b] ,d
C
Niech
C
[a ,b]
- zbiór funkcji ciągłych w przedziale
[a ,b]
d
C
f , g≔ max
x
∈[a ,b]
∣ f x−g x∣ dla f , g ∈C [a ,b]
d
C
-
metryka Czebyszewa
8) Przestrzeń odwzorowań ograniczonych z
metryką supremum
B X , d
sup
Niech
B
X ≔{ f ∣ f : X ℝ∧ f −ograniczona w zb. X }
d
sup
f , g≔sup
x
∈X
∣ f x−g x∣
dla f , g
∈B X
d
sup
-
metryka supremum
Sprawdzamy, że funkcja d
sup
jest metryką.
Dowód
(M0) d
sup
f , g=sup
x
∈ X
∣ f x−g x∣≥0 (z własności wartości bezwzględnej)
(M1) d
sup
f , g =sup
x
∈ X
∣ f x−g x∣=0 ⇔∀ x∈ X ∣ f x−g x∣=0 ⇔
⇔∀ x∈ X
f
x=g x⇔ f =g
(M2) d
sup
f , g =sup
x
∈ X
∣ f x−g x∣=sup
x
∈X
∣g x− f x∣=d
sup
g , f
(M3) f , g , h
∈B X
∀ x∈ X ∣ f x−g x∣=
=∣ f x−h xh x−g x∣≤∣ f x−h x∣∣h x−g x∣≤
≤sup
x
∈ X
∣ f x−h x∣sup
x
∈ X
∣h x−g x∣ ⇒
⇒ sup
x
∈ X
∣ f x−g x∣≤sup
x
∈ X
∣ f x−h x∣sup
x
∈ X
∣h x−g x∣
Zatem
d
sup
f , g≤d
sup
f , hd
sup
h , g
Definicja
Niech będzie dana przestrzeń metryczna
X , d
,
x
0
∈ X ∧r0
K
x
0
, r
≔{x∈ X : d x , x
0
r} -
kula otwarta
o środku w x
0
i promieniu r
K
x
0
, r
≔{x∈ X : d x , x
0
≤r} -
kula domknięta
o środku w x
0
i promieniu r
S
x
0
, r
≔{x∈ X : d x , x
0
=r} -
sfera
o środku w x
0
i promieniu r
Wykład dr Joanny Górskiej
strona 4 z 22
Opracowali: Robert Pałka, Michał Pawłowski

Przykłady
1. Niech dana będzie metryka euklidesowa w
ℝ , d
E
x , y=∣x− y∣ dla x , y∈ℝ .
Szukamy kuli otwartej w tej przestrzeni:
d
E
x , x
0
r ⇔∣x−x
0
∣r ⇔−rx−x
0
r ⇔ x
0
−rxx
0
r
K
x
0
, r
= x
0
−r , x
0
r
Podobnie kula domknięta:
d
E
x , x
0
≤r ⇔∣x−x
0
∣≤r ⇔−r≤x−x
0
≤r ⇔ x
0
−r≤x≤x
0
r
K
x
0
, r
=[ x
0
−r , x
0
r ]
2. Niech
X , d
01
- przestrzeń dyskretna
d
01
x , x
0
r ⇔ x=x
0
dla r
≤1 lub x jest dowolnym elementem zbioru X dla r1
Stąd
K
x
0
, r
=
{
{x
0
}
dla r
≤1,
X
dla r
1.
Podobnie
K
x
0
, r
=
{
{x
0
}
dla r
1,
X
dla r
≥1 .
Definicja
Niech
X , d
- przestrzeń metryczna.
Zbiór A
⊂ X nazywamy
zbiorem otwartym
⇔∀ a∈ A ∃r0: K a , r⊂ A
Rodzinę wszystkich zbiorów otwartych w przestrzeni metrycznej
X , d
nazywamy
topologią generowaną
(indukowaną) w zbiorze X przez metrykę d i oznaczamy
Top
d
X lub krótko Top
d
.
Wykład dr Joanny Górskiej
strona 5 z 22
Opracowali: Robert Pałka, Michał Pawłowski
Twierdzenie
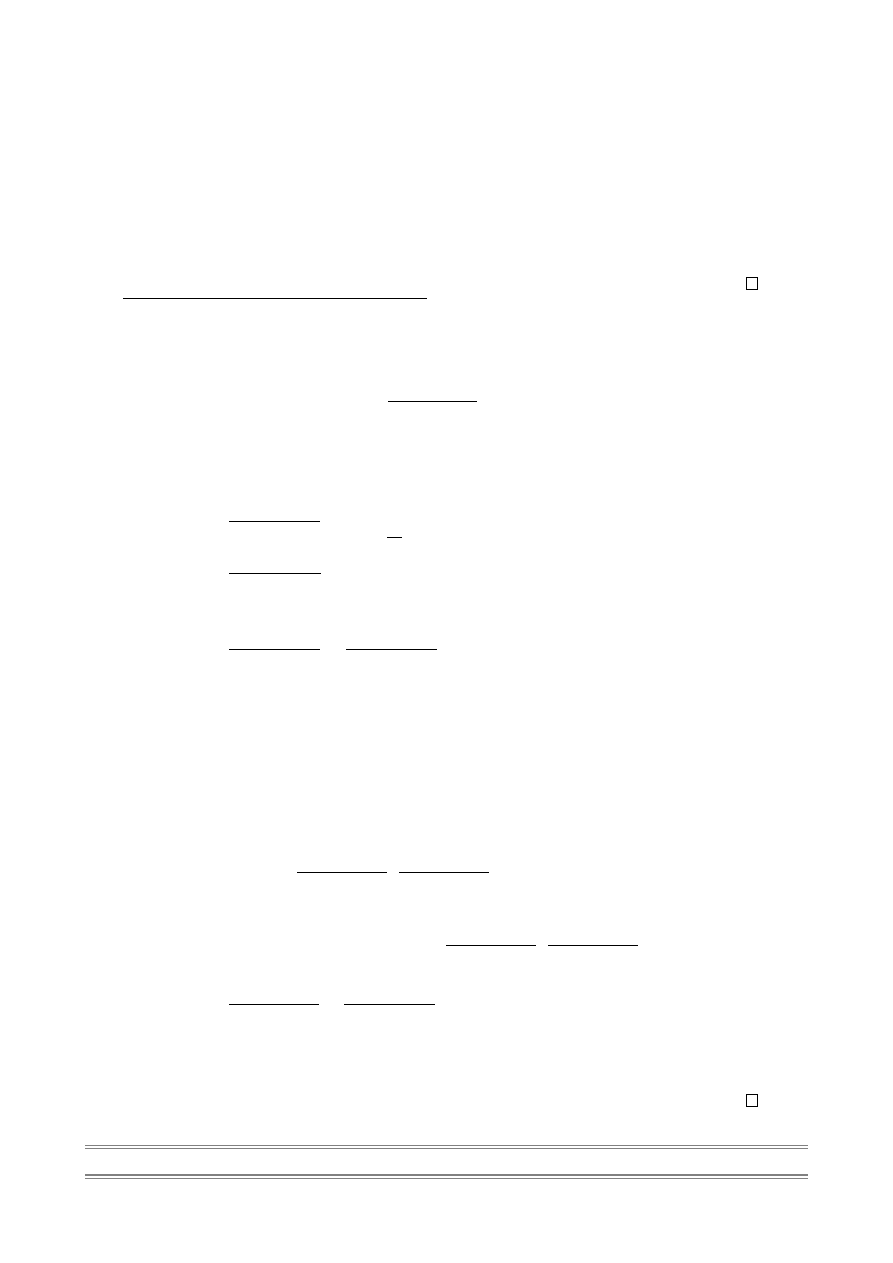
W każdej przestrzeni metrycznej kula otwarta jest zbiorem otwartym.
Dowód
Wykażemy, że K
x
0
, r
jest zb. otwartym (tzn. ∈Top
d
X ).
Niech y
∈K x
0
, r
.
Pytamy czy
∃0 : K y , ⊂K x
0
, r
, to znaczy
by spełniona była implikacja z
∈K y ,⇒ z∈K x
0
, r
czyli implikacja d
z , y⇒ d z , x
0
r .
Jeżeli d
z , y , to
d
z , x
0
≤d z , yd y , x
0
d y , x
0
.
Zatem jeżeli
spełnia warunek 0 r−d y , x
0
(np. ≔
1
2
r−d y , x
0
),
to d
z , x
0
r .
Twierdzenie
(własności zbiorów otwartych)
Niech
X , d - przestrzeń metryczna.
Wtedy
1)
∅ , X - zbiory otwarte
2)
∀ i∈I A
i
⊂ X ∧A
i
−zb. otwarty⇒ ∪
i
∈I
A
i
−zb. otwarty
3) ∀i=1,2 ,...,n A
i
⊂ X ∧A
i
−zb. otwarty⇒ ∩
i
=1
n
A
i
−zb. otwarty
Uwaga
Przecięcie nieskończonej liczby zbiorów otwartych nie musi być zbiorem otwartym.
Przykład
Niech w przestrzeni euklidesowej
ℝ , d
E
będzie dana rodzina zbiorów {A
n
}
n
∈ℕ
, gdzie
A
n
=
0, 1
1
n
dla n
∈ℕ
Każdy z tych zbiorów jest otwarty, tzn.
∀ n∈ℕ: A
n
∈Topℝ .
Jednak przecięcie tej rodziny nie jest zbiorem otwartym, bo
∩
n
∈ℕ
A
n
= ∩
n
∈ℕ
0,1
1
n
=1,0 ]∉Top ℝ
Przykład
X , d
01
K
d
01
x
0
,1
={x
0
}⇒
tw.
{x
0
}∈Top
d
01
Stąd
∀ x
0
∈ X {x
0
}∈Top
d
01
.
Zatem
Top
d
01
=2
X
, gdzie 2
X
≔ P X .
Wykład dr Joanny Górskiej
strona 6 z 22
Opracowali: Robert Pałka, Michał Pawłowski
y
x
d(y,x )
0
0
r
z
Przestrzenie topologiczne
Definicja
Niech X
≠∅
Topologią
zbioru X nazywamy rodzinę
T
czytaj :tau
podzbiorów zbioru X
spełniającą warunki :
( T
1
)
∅∈T , X ∈T
( T
2
)
{
A
i
}
i
∈I
⊂T ⇒ ∪
i
∈I
A
i
∈T
( T
3
)
{
A
i
}
i
=1,2 ,... , n
⊂T ⇒ ∩
i
=1
n
A
i
∈T
Parę
X ,Top
nazywamy
przestrzenią topologiczną
, a każdy element topologii T
nazywamy zbiorem otwartym w przestrzeni topologicznej
X ,Top
i oznaczamy
symbolem Top X .
Przykłady
1. Topologia trywialna w zbiorze X
T
0
=
{
∅ , X
}
2. Topologia dyskretna w X
T =2
X
3. Topologia naturalna prostej rzeczywistej
ℝ
{
U :U
⊂ℝ , ∀ x∈U ∃r0 : x−r , xr⊂U
}
- topologia.
Uwaga
Rodzina
{
a ,b ,−∞ab∞
}
nie jest topologią w
ℝ
Definicja
Przestrzeń topologiczną
X ,Top
nazywamy
przestrzenią Hausdorffa
⇔∀ x , y∈ X x≠ y ⇒∃U
x
,U
y
∈Top: x∈U
x
,
y
∈U
y
, U
x
∩U
y
=∅
Wykład dr Joanny Górskiej
strona 7 z 22
Opracowali: Robert Pałka, Michał Pawłowski
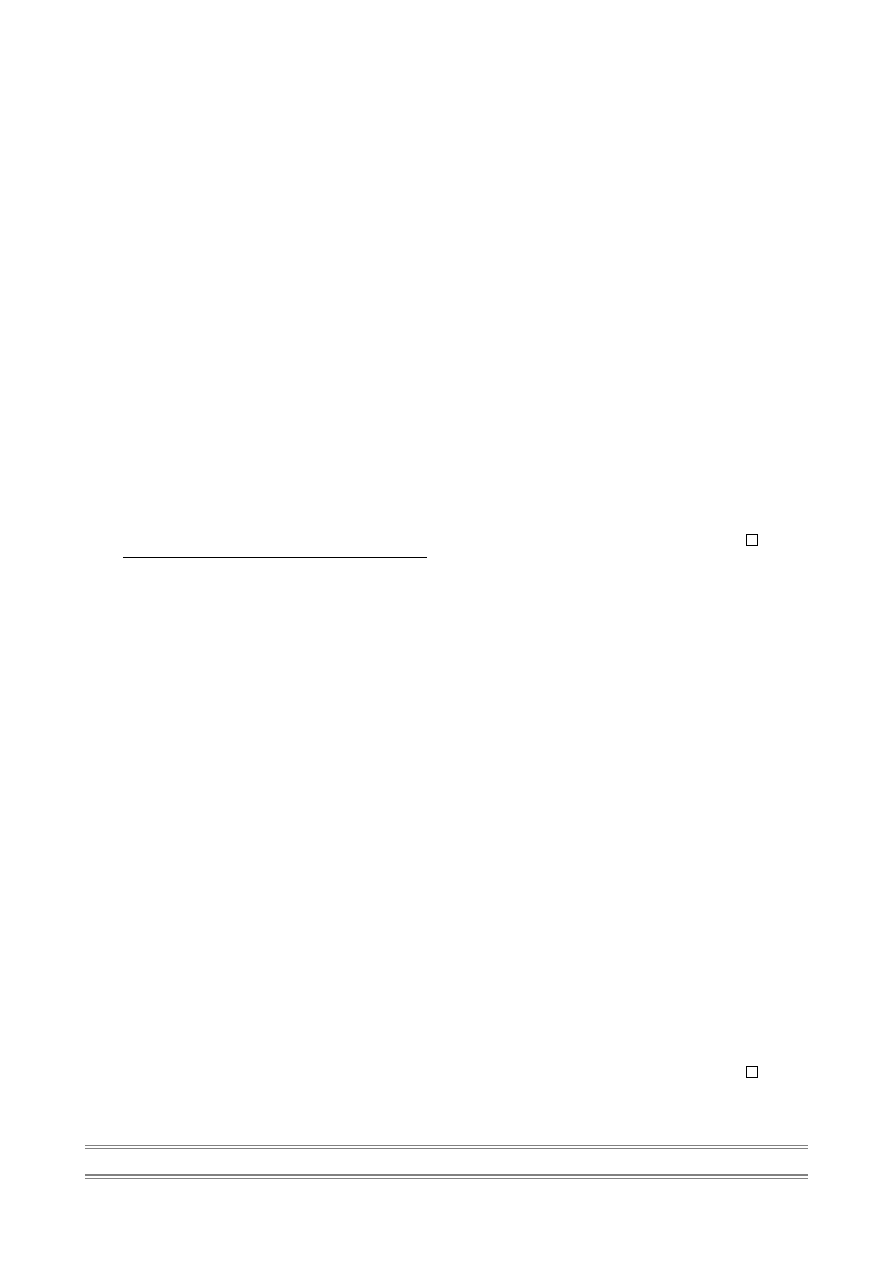
x
y
U
U
x
y
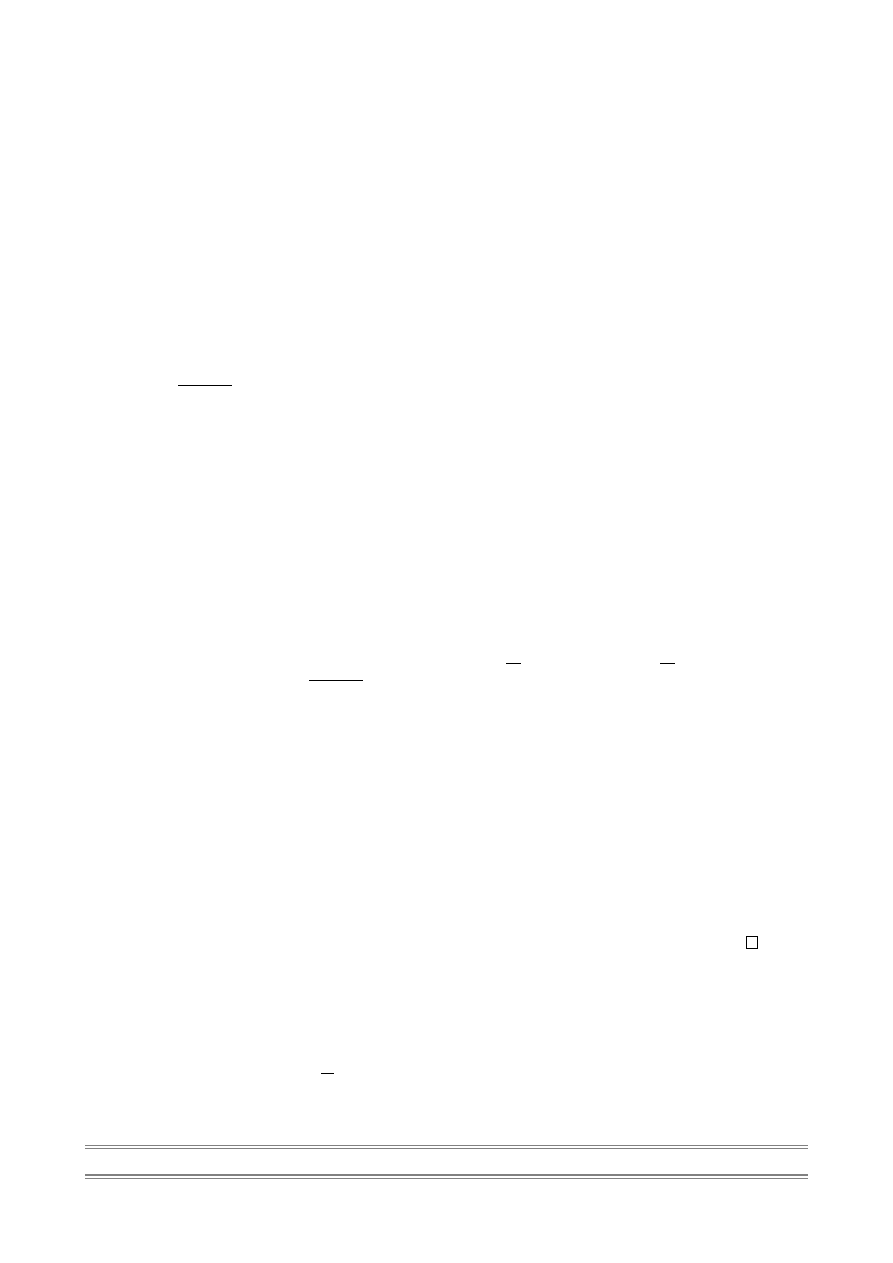
Twierdzenie
Każda przestrzeń topologiczna indukowana przez metrykę jest przestrzenią Hausdorffa.
Dowód
Niech
X , d
- przestrzeń metryczna i x , y
∈ X .
Załóżmy, że x
≠ y .
Wtedy
d
x , y0
.
Definiujemy U
x
≔ K
d
x ,
1
2
d
x , y , U
y
≔ K
d
y ,
1
2
d
y , x .
Zbiory U
x
,U
y
są zbiorami otwartymi, x
∈U
x
, y
∈U
y
i zbiory te rozdzielają punkty
x , y
bo U
x
∩U
y
=∅ .
Definicja
Niech
X ,Top
- przestrzeń topologiczna
oraz niech A
⊂ X
•
Int A
−wnętrze zbioru A
Wnętrze
zbioru A to największy zbiór otwarty zawarty w A .
•
Ex A
−zewnetrze zbioru A
Zewnętrze
zbioru A to wnętrze dopełnienia zbioru A , tzn.
Ex A
=Int X − A=Int A'
•
Fr A
−brzeg zbioru A
Brzeg
zbioru A to zbiór tych punktów, które nie należą ani do wnętrza, ani do
zewnętrza zbioru, tzn.
Fr A
= Int A∪Ex A'
Definicja
Niech
X ,Top
- przestrzeń topologiczna A
⊂ X
Zbiór A nazywamy
domkniętym
, gdy jego dopełnienie do zbioru X jest zbiorem
otwartym, tzn.
A
−domknięty ⇔ A' ∈Top
Wykład dr Joanny Górskiej
strona 8 z 22
Opracowali: Robert Pałka, Michał Pawłowski

Twierdzenie
W każdej przestrzeni metrycznej kula domknięta jest zbiorem domkniętym.
Twierdzenie
W każdej przestrzeni metrycznej dowolny zbiór jednoelementowy
{
x
0
}
jest zbiorem
domkniętym.
Twierdzenie
(własności zbiorów domkniętych)
Niech
X ,Top - przestrzeń topologiczna.
Wtedy
1)
∅ , X −są zbiorami domkniętymi
2)
∀ i∈I B
i
−zb. domknięty∧B
i
⊂ X ⇒ ∩
i
∈I
B
i
−zb. domknięty
3)
∀ i=1,2 ,... , nB
i
−zb. domknięty∧B
i
⊂ X ⇒ ∪
i
=1
n
B
i
−zb. domknięty
Uwaga
Zbiór pusty oraz cały zbiór X są jednocześnie otwarte i domknięte w przestrzeni
topologicznej.
Definicja
Niech
X ,Top
, A
⊂ X
•
A
−domknięcie zbioru A
Domknięcie
zbioru A to najmniejszy zbiór domknięty zawierający A .
Definicja
Niech
X , d
- przestrzeń metryczna
oraz niech A
⊂ X .
Zbiór A nazywamy
ograniczonym
, jeżeli jest on zawarty w pewnej kuli otwartej, tzn.
A
−ograniczony ⇔∃ x
0
∈ X ,∃r0: A⊂K x
0
, r
Wykład dr Joanny Górskiej
strona 9 z 22
Opracowali: Robert Pałka, Michał Pawłowski
Metryki równoważne
Definicja
Metryki d i
określone w zbiorze X nazywamy metrykami równoważnymi ⇔
topologie Top
d
i Top
indukowane w zbiorze X przez te metryki są równe,
Top
d
=Top
, to znaczy:
d
~⇔
[
∀ U U ∈Top
d
⇔U ∈Top
]
Uwaga
Równoważność metryk jest relacją równoważności.
Definicja
Metryki taksówkową, euklidesową i maksimum w
ℝ
n
nazywamy metrykami
standardowymi.
Twierdzenie
Metryki standardowe określają tę samą topologię.
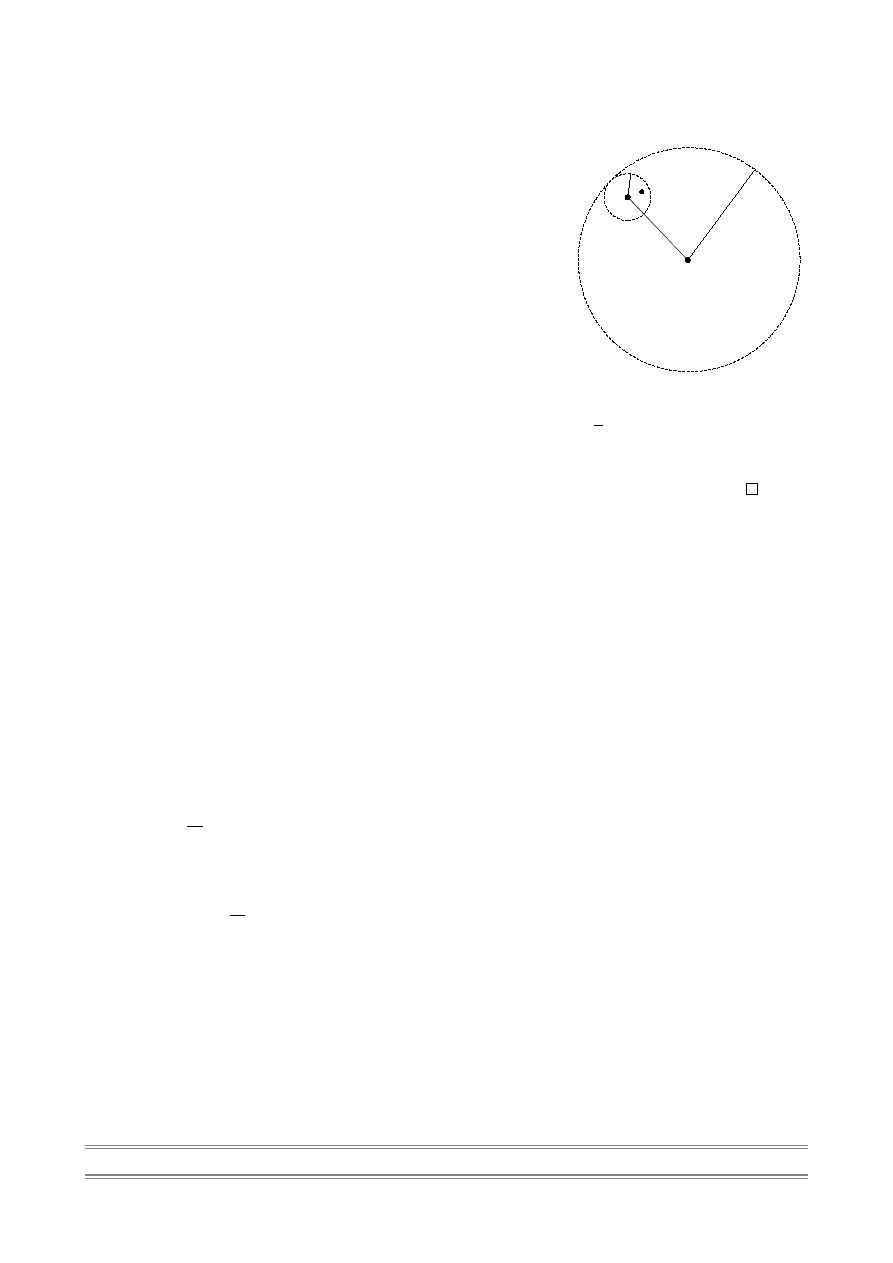
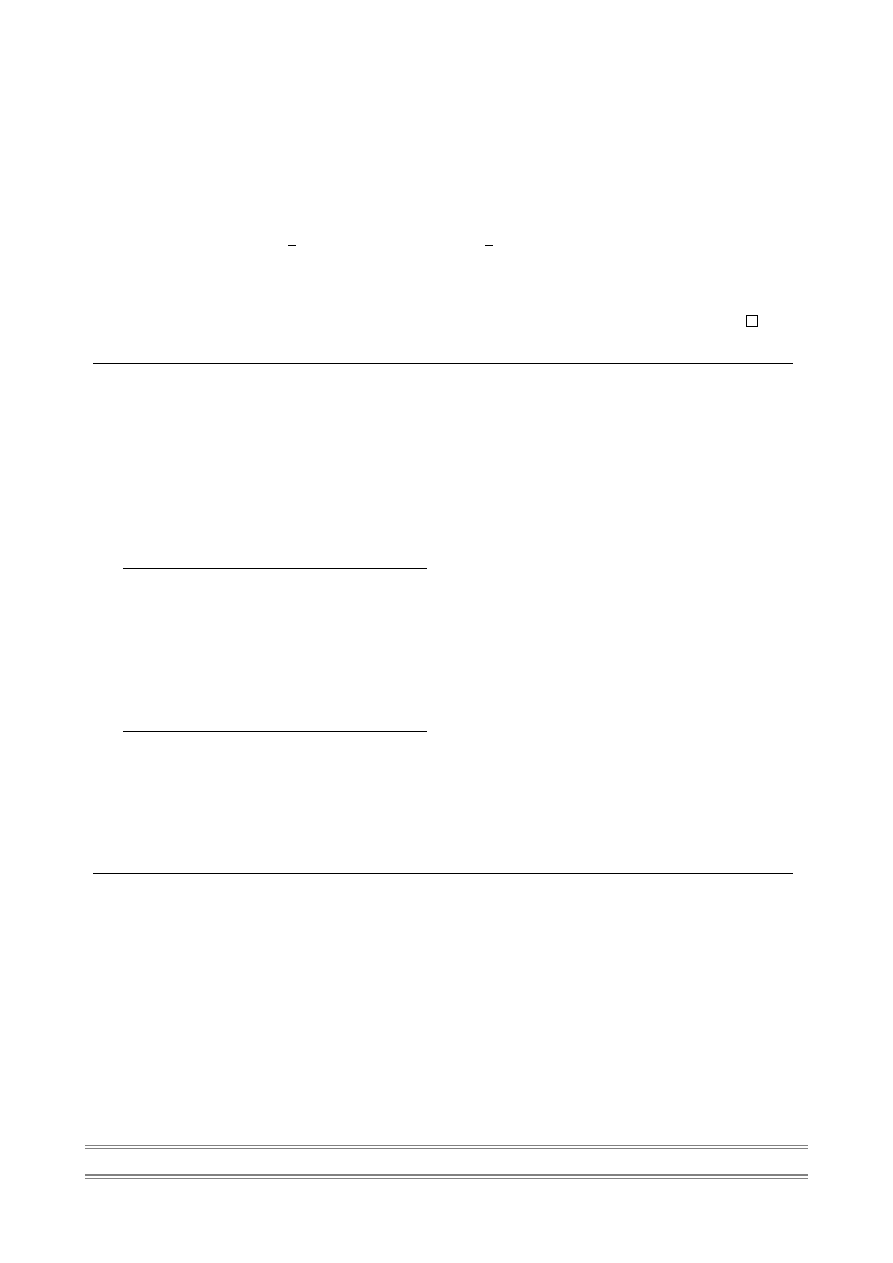
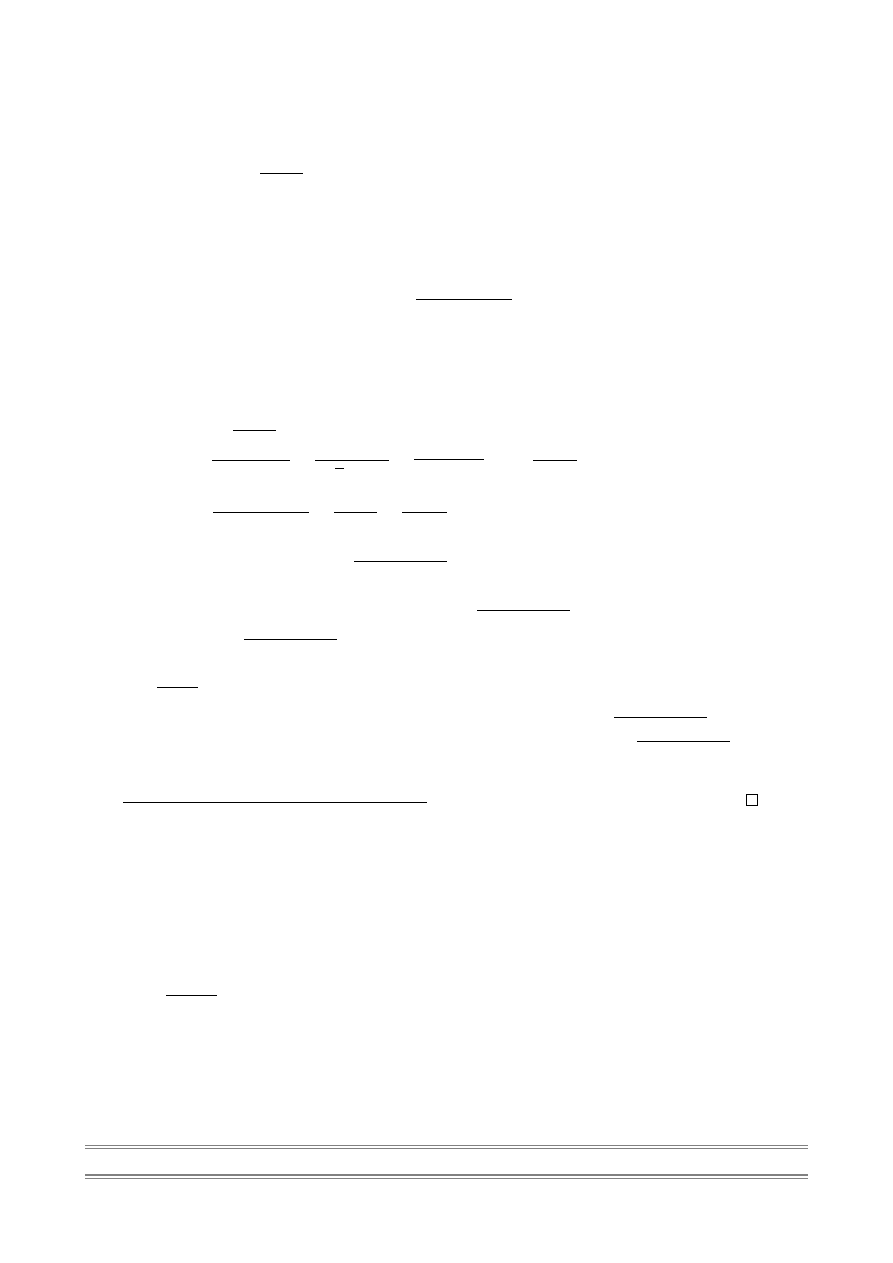
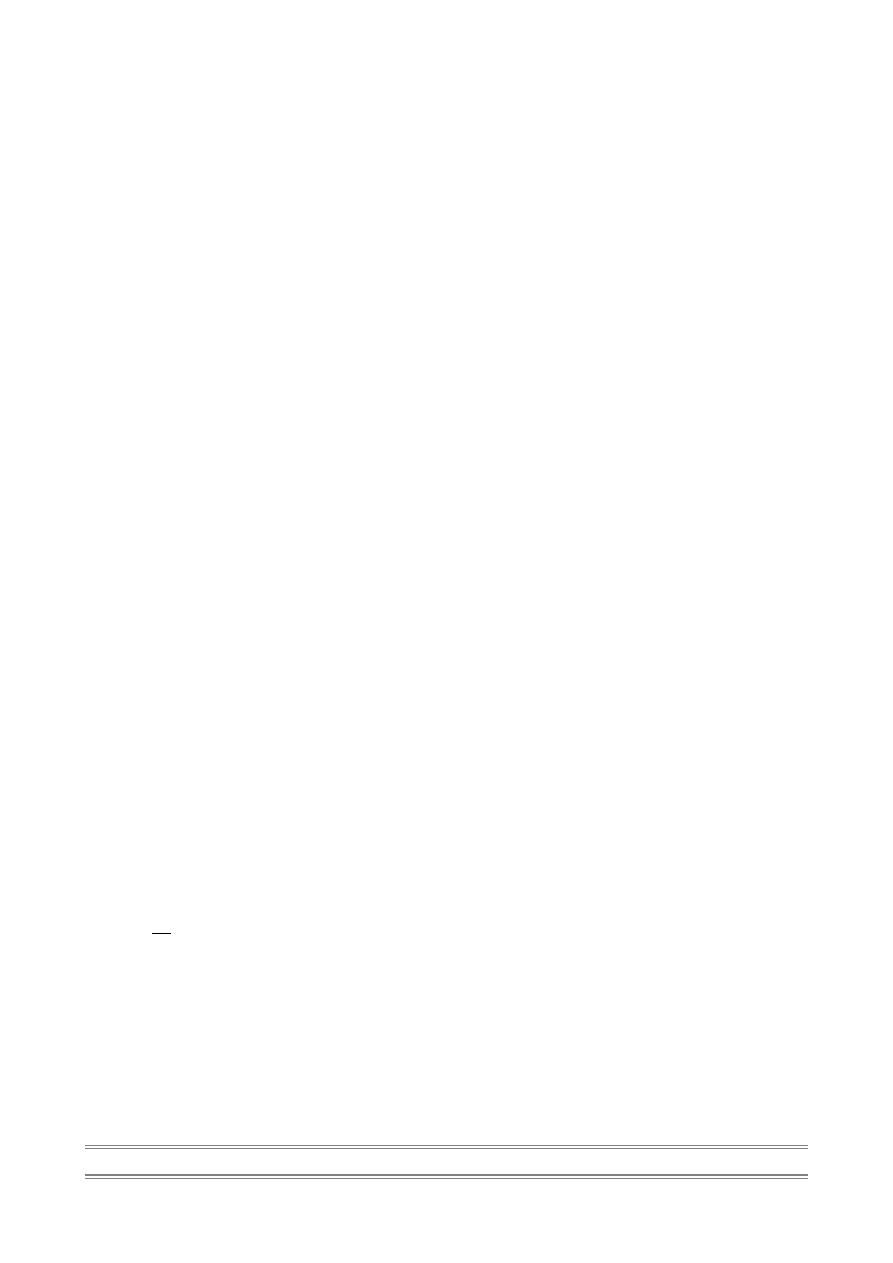
Przykład
K
d
T
0,0,1=
{
x
1
, x
2
: d
T
x
1
, x
2
,0,01
}
∣
x
1
∣
∣
x
2
∣
1
∣
x
2
∣
=1−
∣
x
1
∣
x
2
=1−
∣
x
1
∣
∨−x
2
=1−
∣
x
1
∣
K
T
0,0,1={ x
1
, x
2
:∣x
1
∣∣x
2
∣1 }
Rozważmy teraz
ℝ
2
, d
E
wtedy łatwo sprawdzić, że
K
d
T
0,0,1∈Top
d
E
Definicja
Rozważamy przestrzeń metryczną
X , d
oraz x
0
∈ X .
Otoczeniem
punktu x
0
nazywamy dowolny zbiór otwarty do którego należy x
0
.
Rodzinę wszystkich otoczeń punktu x
0
oznaczamy Top
d
x
0
lub ot x
0
.
Sąsiedztwem
punktu x
0
nazywamy dowolny zbiór U
∗
:
=U ∖
{
x
0
}
, gdzie U
∈Top
d
x
0
.
Top
d
∗
x
0
- rodzina wszystkich sąsiedztw punktu x
0
.
Wykład dr Joanny Górskiej
strona 10 z 22
Opracowali: Robert Pałka, Michał Pawłowski
1
1
-1
-1
0
x
1
x
2
x
2
=1−∣x
1
∣
x
2
=∣x
1
∣−1
Definicja
Punkt x
0
nazywamy
izolowanym
, gdy zbiór jednoelementowy
{
x
0
}
jest zbiorem
otwartym, tzn.
x
0
−punkt izolowany⇔
{
x
0
}
−zbiór otwarty
Przykład
W przestrzeni dyskretnej
X , d
01
zbiór
{
x
0
}
jest otwarty jako kula otwarta. Zatem
każdy punkt zbioru X jest punktem izolowanym w tej przestrzeni.
Definicja
Niech
X ,Top ,
A
⊂ X ,
x
0
∈ X
Punkt x
0
nazywamy
punktem skupienia
zbioru A , gdy w każdym sąsiedztwie
punktu x
0
znajduje się element zbioru A , tzn
∀ U
∗
∈Top
d
∗
x
0
: U
∗
∩A≠∅
Zbiór wszystkich punktów skupienia zbioru A nazywamy
pochodną zbioru
A i
oznaczamy ' A .
Przykłady
1. W dowolnej przestrzeni metrycznej
X , d spełnione jest:
'
∅=∅
∀ x∈ X '
{
x
}
=∅
2. W przestrzeni dyskretnej
X , d
01
:
∀ A∈ X ' A=∅
3. W przestrzeni euklidesowej
ℝ , d
E
'
a ,b='
[
a , b
]
=
[
a , b
]
'
ℕ=∅ w ℝ , natomiast ' ℕ={∞}w ℝ , gdzie ℝ=ℝ∪{∞ ,−∞}
'
ℚ=ℝ w ℝ
Twierdzenie
W dowolnej przestrzeni metrycznej punkt x
0
należy do domknięcia zbioru A wtedy i
tylko wtedy, gdy w dowolnym otoczniu punktu x
0
istnieje element zbioru A ,
x
0
∈A⇔∀ U ∈Top
d
x
0
: U ∩A≠∅
Wykład dr Joanny Górskiej
strona 11 z 22
Opracowali: Robert Pałka, Michał Pawłowski

Normy
Definicja
Niech X będzie przestrzenią wektorową nad ciałem K .
K
=ℝ lub K =ℂ
Normą
w przestrzeni wektorowej
X nazywamy funkcję
( N0 )
∥ . ∥: X [ 0 , ∞
,
spełniającą następujące własności :
( N1 ) x=0 wektor zerowy∈ X ⇔∥x∥=0 skalar ∈ℝ
( N2 ) ∥ x∥=
∣
∣
∥x∥
∈K , x∈ X
( N3 )
∥x y∥≤∥x∥∥y∥
x , y
∈ X
Parę
X ,∥ . ∥
nazywamy
przestrzenią unormowaną
Przykłady
1.
X
=K - przestrzeń wektorowa nad ciałem K .
Funkcja
∣ . ∣
moduł jest normą.
2.
F
X ={ f : X ℝ ; f x=0 poza skończoną liczbą punktów x∈ X } .
Ćwiczenie:
wykazać, że
F
X
jest przestrzenią wektorową.
Niech
f
∈F X
∥ f ∥
∞
≔ sup {∣ f x∣: x∈ X }=max {∣ f x∣: x∈ X } .
Ćwiczenie:
wykazać, że
∥ . ∥
∞
jest normą w
F
X
.
∥ . ∥
∞
-
norma supremum
Twierdzenie
(o indukowaniu metryki przez normę)
Jeśli
X ,∥ . ∥
jest przestrzenią unormowaną, to funkcja
d : X
× X [ 0 , ∞ taka, że
d
x , y≔∥x− y∥ dla x , y∈ X
jest metryką w X .
Metrykę tę nazywamy
metryką indukowaną
(zadaną)
przez normę
.
Dowód
( M0 )
d
x , y≥0
( M1 ) d x , y=0 ⇔∥x− y∥=0 ⇔
N1
x
= y
( M2 ) d x , y=∥x− y∥=∥−1x− y∥ =
N2
∣−1∣∥y−x∥=∥y−x∥=d y , x
( M3 ) d
x , y=∥x−zz− y∥ ≤
N3
∥x−z∥∥z− y∥=d x , zd z , y
Wykład dr Joanny Górskiej
strona 12 z 22
Opracowali: Robert Pałka, Michał Pawłowski
Iloczyn Skalarny
Definicja
Niech
X , K ,,⋅
- przestrzeń wektorowa nad ciałem K .
Iloczynem skalarnym
nazywamy odwzorowanie
〈 ,〉: X × X K
spełniające
następujące własności :
( IS 1 )
〈 x , y〉=〈 y , x〉
dla x , y
∈ X
( IS 2 )
〈axby , z 〉=a 〈 x , z 〉b 〈 y , z 〉
dla a , b
∈K ; x , y , z∈ X
( IS 3 )
〈
x , x
〉
≥0
dla x
∈ X
( IS 4 )
〈
x , x
〉
=0 ⇔ x=0
gdzie symbol
oznacza sprzężenie liczby
Parę
X ,
〈
,
〉
nazywamy
przestrzenią unitarną
Uwaga
(IS1), (IS2)
⇒
(IS2')
〈
x , ay
bz
〉
=a
〈
x , y
〉
b 〈 x , z 〉
dla a , b
∈K ; x , y , z∈ X
Przykład
Rozważmy dwa wektory w przestrzeni K
n
: x , y∈K
n
x
= x
1
, x
2
,
, x
n
y
= y
1
, y
2
,
, y
n
gdzie
x
i
, y
i
∈K
Zdefiniujmy
∗
〈
x , y
〉
≔ x
1
y
1
x
2
y
2
x
n
y
n
Wykażemy, że
∗
definiuje iloczyn skalarny.
Dowód
( IS1 )
〈
x , y
〉
= x
1
y
1
x
2
y
2
x
n
y
n
= y
1
x
1
y
2
x
2
y
n
x
n
= y
1
x
1
y
2
x
2
y
n
x
n
=
= y
1
x
1
y
2
x
2
y
n
x
n
= y
1
x
1
y
2
x
2
y
n
x
n
=
〈
y , x
〉
( IS 2 )
ćwiczenie
( IS 3 )
〈
x , x
〉
=x
1
x
1
x
2
x
2
x
n
x
n
=∣x
1
∣
2
∣x
n
∣
2
≥0
( IS 4 )
〈
x , x
〉
=0 ⇔
∣
x
1
∣
==
∣
x
n
∣
=0 ⇔ x
1
==x
n
=0 ⇔ x=0
Iloczyn
∗
nazywamy
standardowym iloczynem skalarnym w
K
n
Wykład dr Joanny Górskiej
strona 13 z 22
Opracowali: Robert Pałka, Michał Pawłowski
Twierdzenie
Niech
X ,
〈
,
〉
- przestrzeń unitarna.
Wtedy prawdziwa jest następująca
nierówność Cauchy' ego - Bunianowskiego -
Schwarza
∣〈 x , y〉∣
2
≤〈 x , x〉⋅
〈
y , y
〉
dla x , y
∈ X
Dowód
Dla x , y
∈ X definiujemy
a
≔
{
∣〈 x , y〉∣
〈 x , y 〉
, gdy
〈 x , y〉≠0
1
, gdy
〈 x , y〉=0
Stąd a
∈K i
∣a∣=1
.
Niech r
∈ℝ .
Wtedy
〈
rax
y , rax y
〉
≥
IS3
0 .
Z drugiej strony
〈
rax
y , rax y
〉
=
IS2
ra
〈
x , rax
y
〉
〈
y , rax
y
〉
=
IS2
'
ra
⋅ra
〈
x , x
〉
ra
〈
x , y
〉
ra
〈
y , x
〉
〈
y , y
〉
=
= r
2
∣a∣
2
〈 x , x〉ra
〈
x , y
〉
r a
〈
x , y
〉
〈
y , y
〉
=r
2
〈
x , x
〉
2 r∣
〈
x , y
〉
∣
〈
y , y
〉
Zatem
∀ r∈ℝ r
2
〈
x , x
〉
2 r∣
〈
x , y
〉
∣
〈
y , y
〉
≥0
Jeśli
〈
x , x
〉
=0 ,to powyższa nierówność jest spełniona ∀ r∈ℝ⇔∣〈 x , y〉∣=0
Jeśli
〈
x , x
〉
0 ,to powyższa nierówność jest spełniona ∀ r∈ℝ⇔≤0 .
Zatem
=4 ∣
〈
x , y
〉
∣
2
−4
〈
x , x
〉
⋅
〈
y , y
〉
≤0
czyli
∣
〈
x , y
〉
∣
2
≤
〈
x , x
〉
⋅
〈
y , y
〉
.
Wniosek
Dla standardowego iloczynu skalarnego w ℝ
n
nierówność Schwarza przyjmuje postać
klasycznej
nierówności Cauchy 'ego
:
∣
∑
i
=1
n
x
i
⋅y
i
∣
2
≤
∑
i
=1
n
∣x
i
∣
2
⋅
∑
i
=1
n
∣y
i
∣
2
dla x , y∈ℝ
n
Wykład dr Joanny Górskiej
strona 14 z 22
Opracowali: Robert Pałka, Michał Pawłowski
Twierdzenie
( o indukowaniu normy przez iloczyn skalarny )
Jeśli przestrzeń
X ,
〈
,
〉
jest przestrzenią unitarną, to funkcja
∥ . ∥: X [ 0 , ∞
dana wzorem
∥x∥≔
〈
x , x
〉
dla x
∈ X
jest normą w X .
Definicja
Normę tę nazywamy
normą euklidesową
, a metrykę d zadaną przez normę
euklidesową
d
x , y=∥x− y∥=
〈
x
− y , x− y
〉
dla x , y
∈ X
nazywamy
metryką euklidesową
.
Dowód twierdzenia
( N0 ) Norma jako pierwiastek jest nieujemna
( N1 ) ∥x∥=0 ⇔
〈
x , x
〉
=0 ⇔
〈
x , x
〉
=0 ⇔
IS 4
x
=0
( N2 ) ∥⋅x∥=
〈
⋅x ,⋅x
〉
=
⋅
〈
x , x
〉
=
∣∣
2
〈
x , x
〉
=∣∣⋅
〈
x , x
〉
=∣∣⋅∥x∥
( N3 ) Aby udowodnić nierówność
∥x y∥≤∥x∥∥y∥
wystarczy sprawdzić prawdziwośc
nierówności
〈
x
y , x y
〉
≤
?
〈
x , x
〉
〈
y , y
〉
,
którą sprawdzimy podnosząc obie strony nierówności do kwadratu
〈
x
y , x y
〉
≤
?
〈
x , x
〉
〈
y , y
〉
2 ⋅
〈
x , x
〉
⋅
〈
y , y
〉
i korzystając z własności (IS2) i (IS2')
〈
x , x
〉
〈
x , y
〉
〈
y , x
〉
〈
y , y
〉
≤
?
〈
x , x
〉
〈
y , y
〉
2 ⋅
〈
x , x
〉
⋅
〈
y , y
〉
〈
x , y
〉
〈
y , x
〉
≤
?
2
⋅
〈
x , x
〉
⋅
〈
y , y
〉
.
Ponieważ
〈
y , x
〉
=
〈
x , y
〉
, więc
〈
x , y
〉
〈
y , x
〉
=2 ⋅ℜ
〈
x , y
〉
, gdzie
ℜ oznacza część rzeczywistą
liczy zespolonej. Zatem wystarczy udowodnić, że 2 ⋅ℜ
〈
x , y
〉
≤
?
2
⋅
〈
x , x
〉
⋅
〈
y , y
〉
,
a ostatnia nierówność jest prawdziwa, ponieważ ℜ
〈
x , y
〉
≤∣
〈
x , y
〉
∣≤
〈
x , x
〉
⋅
〈
y , y
〉
na
podstawie nierówności Schwarza.
Przykład
Standardowe normy w K
n
x
∈K
n
x
= x
1
, x
2
,
, x
n
∥x∥
T
≔
∑
i
=1
n
∣
x
i
∣
- norma taksówkowa
∥x∥
E
≔
∑
i
=1
n
∣x
i
∣
2
- norma euklidesowa
∥x∥
∞
≔ max
{
∣x
i
∣;i=1 , 2 ,, n
}
- norma maksimum
Wykład dr Joanny Górskiej
strona 15 z 22
Opracowali: Robert Pałka, Michał Pawłowski
Pojęcia topologiczne
Granica funkcji i ciagu w przestrzeniach topologicznych i metrycznych
Niech X ,Y - przestrzenie topologiczne,
f : X
Y
x
0
∈' D
f
( x
0
- punkt skupienia dziedziny funkcji f )
Mówimy, że funkcja f ma w punkie x
0
granicę
g
∈Y ,
jeśli
∀ U ∈Top g ∃V
∗
∈Top
∗
x
0
: f [V
∗
]⊂U
i piszemy lim
x
x
0
f
x=g
Niech
a
n
n
∈N
będzie ciągiem w przestrzeni topologicznej Y ,
a
n
n
∈N
⊂Y .
Ciąg jest funkcją a :
ℕ∋n an=a
n
∈Y o dziedzinie D
a
=ℕ .
Jedynym punktem skupienia zbioru
ℕ w ℝ jest ∞ , ' D
a
=
{
∞
}
w
ℝ .
Zatem
lim
n
∞
a
n
=g ⇔∀ U ∈Top g ∃V
∗
∈Top
∗
∞ : a[V
∗
]⊂U
Stąd
lim
n
∞
a
n
=g ⇔ ∀ U ∈Top g ∃ n
0
∈ℕ∀ nn
0
a
n
∈U
Jeśli
Y , d
- przestrzeń metryczna, to powyższa definicja przyjmuje posta
lim
n
∞
a
n
=g ⇔∀ 0 ∃n
0
∈ℕ ∀ nn
0
: a
n
∈K g ,
Stąd
lim
n
∞
a
n
⇔∀ 0 ∃n
0
∈ℕ ∀ nn
0
: d
a
n
, g
Uwaga
Jeżeli Y
=K , d =d
E
, to otrzymujemy znaną def. Cauchy'ego granicy ciągu
lim
n
∞
a
n
=g ⇔∀ 0 ∃n
0
∈ℕ ∀ nn
0
:
∣
a
n
−g
∣
Uwaga
Pojęcie granicy ciągów liczbowych można przenieść na pojęcie granicy ciągu w dowolnej
przestrzeni metrycznej, mianowicie
lim
n
∞
a
n
=g ⇔lim
n
∞
d
a
n
, g
=0
Uwaga
Ponieważ w przestrzeni K
n
metryki standardowe są równoważne (wyznaczają te same
topologie), zatem mówiąc o zbieżności ciągu do punktu nie musimy precyzować o którą
metrykę chodzi, gdyż zbieżność w jednej metryce implikuje zbieżność w pozostałych
metrykach.
Wykład dr Joanny Górskiej
strona 16 z 22
Opracowali: Robert Pałka, Michał Pawłowski

Punkty skupienia ciągu
Definicja
Ciąg b
k
k
∈ℕ
nazywamy podciągiem ciągu a
n
n
∈ℕ
, jeżeli istnieje taka silnie rosnąca
funkcja g :
ℕℕ , że b
k
=a
g
k
dla k
∈ℕ i oznaczamy
b
k
=a
n
k
=a
n
k
.
Przykład
a
n
n
∈ℕ
:
a
n
=
1
n
b
k
k
∈ℕ
:
b
k
=
1
k
2
b
k
k
∈ℕ
jest podciągiem a
n
n
∈ℕ
, bo funkcja wybierająca
g
k =k
2
jest silnie
rosnąca.
Definicja
Niech Y – przestrzeń topologiczna lub metryczna
a
n
n
∈ℕ
⊂Y
Punkt s
∈Y nazywamy
punktem skupienia ciągu
a
n
n
∈ℕ
, jeśli istnieje taki podciąg
a
n
k
k
∈ℕ
ciągu a
n
n
∈ℕ
, że s
=lim
k
∞
a
n
k
.
'
a
n
n
∈ℕ
- zbiór punktów skupienia ciągu a
n
n
∈ℕ
Uwaga
Zbiór punktów skupienia ciągu a
n
n
∈ℕ
jest różny od zbioru punktów skupienia zbioru
wartości ciągu,
'
a
n
≠'
{
a
n
, n
∈ℕ
}
Przykład
Niech
a
n
=−1
n
, n
∈ℕ
Wtedy
dla b
k
=a
2 k
=1
lim
k
∞
b
k
=1
oraz dla c
k
=a
2 k
−1
=−1 lim
k
∞
c
k
=−1 .
Zatem '
a
n
=
{
−1 , 1
}
.
Jednak
'
{
a
n
, n
∈ℕ
}
='
{
−1 , 1
}
=∅ w ℝ
.
Wykład dr Joanny Górskiej
strona 17 z 22
Opracowali: Robert Pałka, Michał Pawłowski

Twierdzenie
( Bolzano – Weierstrassa )
Niech a
n
n
∈ℕ
⊂ℝ
a
n
n
∈ℕ
- ograniczony ⇒' a
n
n
∈ℕ
jest niepustym podzbiorem zbioru
ℝ .
Definicja
Niech a
n
n
∈ℕ
⊂ℝ oraz
niech ' a
n
n
∈ℕ
- zbiór punktów skupienia ciągu a
n
n
∈ℕ
w zbiorze ℝ .
Granicą górną ciągu
a
n
n
∈ℕ
nazywamy kres górny zbioru punktów skupienia ciągu
a
n
n
∈ℕ
w ℝ i oznaczamy:
lim
n
∞
a
n
=lim sup
n
∞
a
n
≔ sup' a
n
(czytaj : limes superior).
Granicą dolną ciągu
a
n
n
∈ℕ
nazywamy kres dolny zbioru punktów skupienia ciągu
a
n
n
∈ℕ
w ℝ i oznaczamy:
lim
n
∞
a
n
=lim inf
n
∞
a
n
≔ inf ' a
n
(czytaj : limes inferior)
Przykład
a
n
=sin
2
n
'
a
n
n
∈ℕ
=
{
−1 , 0 , 1
}
Zatem
lim sup
n
∞
a
n
=1
lim inf
n
∞
a
n
=−1
Uwaga
1) ∀ a
n
n
∈ℕ
⊂ℝ ∃lim inf
n
∞
a
n
∈ ℝ ,oraz ∃lim sup
n
∞
a
n
∈ ℝ
2) a
n
jest ograniczony w ℝ ⇒ ∃lim inf
n
∞
a
n
∈ℝ oraz ∃lim sup
n
∞
a
n
∈ℝ
3) a
n
jest ciągiem zbieżnym do g ⇒ lim inf
n
∞
a
n
= lim sup
n
∞
a
n
= g
Wykład dr Joanny Górskiej
strona 18 z 22
Opracowali: Robert Pałka, Michał Pawłowski
Zupełność przestrzeni metrycznej
Niech
X , d
- przestrzeń metryczna
a
n
n
∈ℕ
⊂ X
Twierdzenie
lim
n
∞
a
n
=g ⇒ lim
min
{
n , m
}
∞
d
a
n
, a
m
=0
Dowód
0
≤d a
n
, a
m
≤d a
n
, g
d g , a
m
n
∞
m
∞
⇒ min{n , m}∞ ⇒ d a
n
, a
m
0 na podstawie twierdzenia o 3 ciągach.
Uwaga
lim
min
{
n , m
}
∞
d
a
n
, a
m
=0 ⇔
∀ 0 ∃n
0
∈ℕ ∀ n , mn
0
: d
a
n
, a
m
C
Warunek
C
nazywamy
warunkiem Cauchy'ego
zbieżności ciągu a
n
n
∈ℕ
w
przestrzeni metrycznej.
Ciag elementów przestrzeni metrycznej spełniający warunek Cauchy'ego nazywamy
ciągiem Cauchy'ego
.
Wniosek
Warunek Cauchy'ego jest warunkiem koniecznym zbieżności ciągu Cauchy' ego w
przestrzeni metrycznej, tzn.
∃
n
∞
lim a
n
⇒a
n
n
∈ℕ
- jest ciągiem Cauchy'ego
Uwaga
Warunek Cauchy'ego nie jest warunkiem wystarczającym zbieżności ciągu w przestrzeni
metrycznej.
Przykład
Niech
Y
=0 , 1]
.
Wtedy
Y , d
E
- przestrzeń metryczna.
Niech
a
n
n
∈ℕ
a
n
=
1
n
.
W przestrzeni metrycznej
ℝ , d
E
ciąg a
n
n
∈ℕ
jest zbieżny, bo
d
E
a
n
, 0
=
∣
a
n
∣
=
1
n
0 , gdy n ∞ ;
⇒ a
n
n
∈ℕ
- ciąg Cauchy'ego w
ℝ , d
E
, ale też w Y , d
E
.
Jednakże, a
n
n
∈ℕ
nie jest zbieżny w Y , bo 0
∉Y .
Wykład dr Joanny Górskiej
strona 19 z 22
Opracowali: Robert Pałka, Michał Pawłowski

Definicja
Przestrzeń metryczną
X , d
nazywamy zupełną, jeśli każdy ciąg elementów tej
przestrzeni spełniający warunek Cauchy'ego jest zbieżny ( do elementu tej przestrzeni ).
Twierdzenie
Przestrzeń unormowana K
n
jest przestrzenią metryczną zupełną ( z metryką
standardową zawartą normą standardową) .
Uwaga
Pojęcie zupełności przestrzeni jest pojęciem metrycznym, to znaczy zależnym od wyboru
metryki.
Przykład
ℝ , d
E
- przestrzeń metryczna zupełna
ℝ , d - przestrzeń metryczna, gdzie d x , y=∣arctg x - arctg y∣ dla x , y∈ℝ
Niech a
n
n
∈ℕ
a
n
=n ∀ n∈ℕ .
Ciąg a
n
n
∈ℕ
jest ciągiem Cauchy'ego w
ℝ , d , bo warunek
∀ 0 ∃n
0
∀ n , mn
0
∣arctg n - arctg m ∣
jest spełniony, jeśli
arctg n
0
≥
2
−
zatem, np. gdy
n
0
=
[
tg
2
−
]
.
Jednakże
lim
n
∞
a
n
=lim
n
∞
n
=∞ ∉ℝ
⇒a
n
n
∈ℕ
nie jest zbieżny w
ℝ , d ⇒ ℝ , d nie jest przestrzenią zupełną
( nie przeczy to zupełności przestrzeni eulkidesowej
ℝ , d
E
, ponieważ ciąg a
n
n
∈ℕ
nie jest ciągiem Cauchey' ego w tej przestrzeni ).
Definicja
Przestrzeń unormowaną zupełną, to znaczy zupełną w metryce zadanej normą,
nazywamy
przestrzenią Banacha
.
Definicja
Przestrzeń unitarną zupełną, to znaczy zupełną w metryce danej normą wyznaczoną
przez iloczyn skalarny, nazywamy
przestrzenią Hilberta
.
Wniosek
1) Przestrzeń K
n
z normą standardową jest przestrzenią Banacha.
2) Przestrzeń K
n
ze standardowym iloczynem skalarnym jest przestrzenią Hilberta.
Wniosek
Każda przestrzeń Hilberta jest przestrzenią Banacha ( z normą daną iloczynem
skalarnym).
Wykład dr Joanny Górskiej
strona 20 z 22
Opracowali: Robert Pałka, Michał Pawłowski
Granica funkcji (c.d.)
Def. Cauchy'ego
Niech
X , d , Y , – przestrzenie metryczne
f : X
Y
x
0
∈' D
f
, g
∈Y
wtedy
lim
x
x
0
f
x=g :⇔∀ 0 ∃ 0 ∀ x∈D
f
: 0
d x , x
0
⇒ f x , g
Def. Heinego
Niech
X , d - przestrzeń metryczna
Y – przestrzeń topologiczna
f : X
Y
x
0
∈' D
f
, g
∈Y
Wtedy
lim
x
x
0
f
x=g :⇔∀ x
n
n
∈ℕ
:
{
x
n
∈D
f
x
n
≠x
0
∀ n∈ℕ
lim
n
∞
x
n
=x
0
lim
n
∞
f
x
n
=g
Twierdzenie
Definicje Cauchy'ego i Heinego są równoważne.
Ciągłość funkcji w przestrzeniach topologicznych
Niech X ,Y – przestrzenie topologiczne
f : X
Y
x
0
∈D
f
Definicja
Funkcja jest
ciągła
w punkcie x
0
f
∈C x
0
:⇔[ x
0
∈ ' D
f
∧ lim
x
x
0
f
x= f x
0
∨ x
0
∉ ' D
f
]
Funkcja f jest ciągła, gdy jest ciągła w każdym punkcie z dziedziny D
f
.
Przykład
f
x=
x
∣x∣
D
f
=ℝ∖
{
0
}
, więc f jest ciągła.
Wykład dr Joanny Górskiej
strona 21 z 22
Opracowali: Robert Pałka, Michał Pawłowski
Przestrzenie spójne
Przestrzeń topologiczną X nazywamy
spójną
, jeśli
~
∃ A , B∈Top : X =A∪B , A≠∅≠B , A∩B=∅
gdzie symbol ~ oznacza negację
Niech
E
⊂ X
E nazywamy
zbiorem spójnym
, jeśli
~
∃ A , B∈Top : E⊂A∪B , A∩E≠∅≠B∩E , A∩B∩E=∅
Twierdzenie
Jedynymi podzbiorami spójnymi przestrzeni unormowanej
ℝ ,∣.∣ są przedziały
Twierdzenie
( o zachowaniu spójności )
X ,Y
– przestrzenie topologiczne
oraz niech przestrzeń X jest spójna.
Wtedy
F
∈C X ⇒ f [ X ]
jest spójny
( obraz ciągły zbioru spójnego jest spójny )
Dowód
Hipoteza –
f
[ X ]
nie jest spójny, tzn.
∃ A , B∈T f [ X ] : A≠∅≠B f [ X ]=A∪B ∧ A∩B=∅
Wtedy
X
= f
−1
[ A]∪ f
−1
[ B]
Ponadto
f
−1
[ A]≠∅≠ f
−1
[ B]
f
−1
[ A]∩ f
−1
[ B]= f
−1
[ A∩B]= f
−1
[∅]=∅
oraz
f
−1
[ A] , f
−1
[ B]∈Top X
Zatem X nie jest spójny – a to jest sprzeczne z hipotezą.
Czyli hipoteza jest fałszywa.
Niech X – przestrzeń topologiczna
f : X
ℝ
f -
ma własność Darboux
na X , gdy
f
[ X ]
jest przedziałem.
X - zbiór spójny
f
∈C X
}
f
[ X ]
- jest przedziałem
( funkcja ciągła na przestrzeni spójnej ma własność Darboux )
Wykład dr Joanny Górskiej
strona 22 z 22
Opracowali: Robert Pałka, Michał Pawłowski
Wyszukiwarka
Podobne podstrony:
metryki
Metryka Koronna 1511
nalot metryka
Metryka, Stopa (metryka)
Inwentarz Metryki Koronnej, W, Rozmaitości
metryka strzałowa - przykład, Górnictwo i Geologia AGH, Technika Strzelnicza
5 Metryki jakosci cwiczenia id 40274
4 Metryki jakosci id 37754 Nieznany (2)
WYTYCZNE TECHNICZNE K-1.1 (1980 - Metryka mapy zasadniczej), geodezja, Prawo w geodezji
Metryka Koronna, W, Rozmaitości
Kamera - metryki, Geodezja i Kartografia, Fotografia
wzor metryki sprawy zalacznik do rozporzadzenia, kadry-i-awans
Metryka
metryka
Metryka Strzałowa (2)
METRYKA PRACY DYPLOMOWEJ, Seminarium dyplomowe
więcej podobnych podstron