WM
12. PRZEMIESZCZENIA W BELKACH
1
12. PRZEMIESZCZENIA W BELKACH
12.1. Wiadomości podstawowe
Jak wiadomo siły przekrojowe wyznacza się wykorzystując zasadę zesztywnienia czyli obliczamy
wszystkie siły zakładając, że belka jest nieodkształcalną tarczą sztywną. Jednak w tym rozdziale będziemy
przyjmować, że belka może się odkształcać jednak siły przekrojowe w dalszym ciągu będziemy wyznaczać
z zastosowaniem zasady zesztywnienia. Przemieszczenie belki będziemy opisywali za pomocą wektora
przemieszczenia, który w układzie współrzędnych XYZ będzie miał postać
f =u⋅iv⋅jw⋅k
.
(12.1)
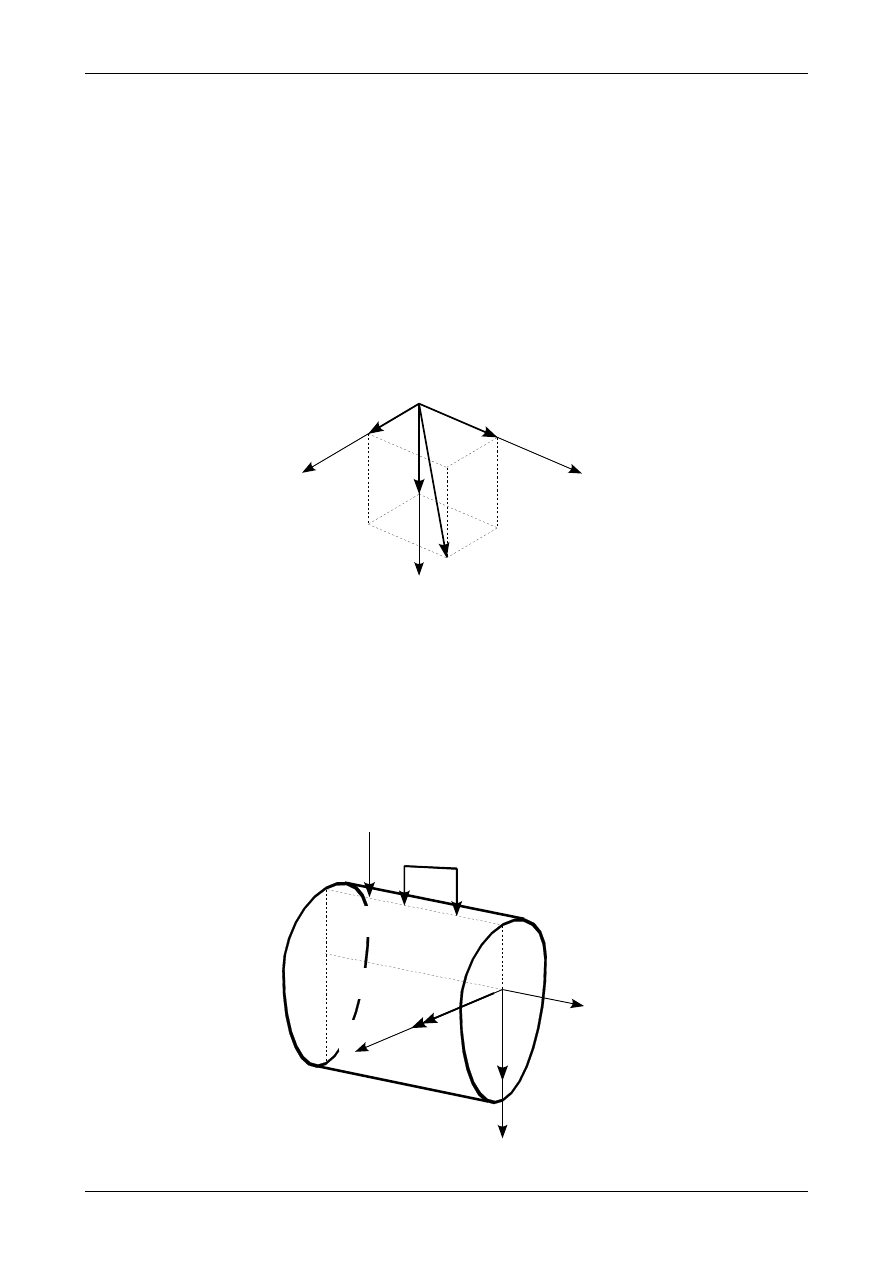
Składowe wektora (12.1) w układzie XYZ przedstawia rysunek 12.1.
X
Y
Z
u
v
w
f
Rys. 12.1. Wektor przemieszczenia
W niniejszym rozdziale ograniczymy się do przypadku, w którym płaszczyzna obciążenia pokrywa się
z osią główną bezwładności Z=Z
gl
. Przypadek taki nazywamy zginaniem prostym. Rysunki 12.2, 12.3 i
12.4 przedstawiają obciążenie pręta oraz siły przekrojowe czyli siłę poprzeczną i moment zginający. W
belce jak wiadomo siła normalna jest w większości przypadków równa zero. We wszystkich rozpatrywanych
przez nas przypadkach będzie się ona równała zero. Na rysunkach 12.2, 12.3 i 12.4 przedstawione są
dodatnie siły przekrojowe. W dalszej części pominiemy wpływ siły poprzecznej T=T
Z
na przemieszczenia
belki. Przemieszczenia będą zależeć więc tylko od momentu zginającego M=M
Y
.
Y=Y
0
=Y
gl
Z=Z
0
=Z
gl
X
P
q(x)
M=M
Y
T
=
T
Z
Rys. 12.2. Obciążenie i siły przekrojowe w belce
Dr inż. Janusz Dębiński

WM
12. PRZEMIESZCZENIA W BELKACH
2
Y=Y
0
=Y
gl
Z=Z
0
=Z
gl
X
P
q(x)
M
=M
Y
T
=
T
Z
Rys. 12.3. Statycznie równoważne obciążenie i siły przekrojowe
X
T
=
T
Z
M=M
Y
Z=Z
0
=Z
gl
Rys. 12.4. Widok z boku pręta na dodatnie siły przekrojowe
Jeżeli obciążenie działa w płaszczyźnie ZX to belka będzie doznawać tylko przemieszczeń po
kierunku głównej osi bezwładności Z=Z
gl
. Wektor przemieszczenia będzie miał tylko jedną składową czyli
f =w⋅k
.
(12.2)
Jednostką przemieszczenia (nazywanego dalej ugięciem) jest metr. Zamiast zapisywać ugięcie w jako
wektor będziemy używać funkcji linii ugięcia w(x), której znak będzie zależał od tego, w którą stronę
przemieści się belka. Jeżeli ugięcie nastąpi w dół (zgodnie ze zwrotem osi Z) to będzie ono dodatnie,
jeżeli do góry (przeciwnie do zwrotu osi Z) to będzie ono ujemne. Przedstawia to rysunek 12.5.
w(x)
w>0
w<0
Rys. 12.5. Przykładowa linia ugięcia
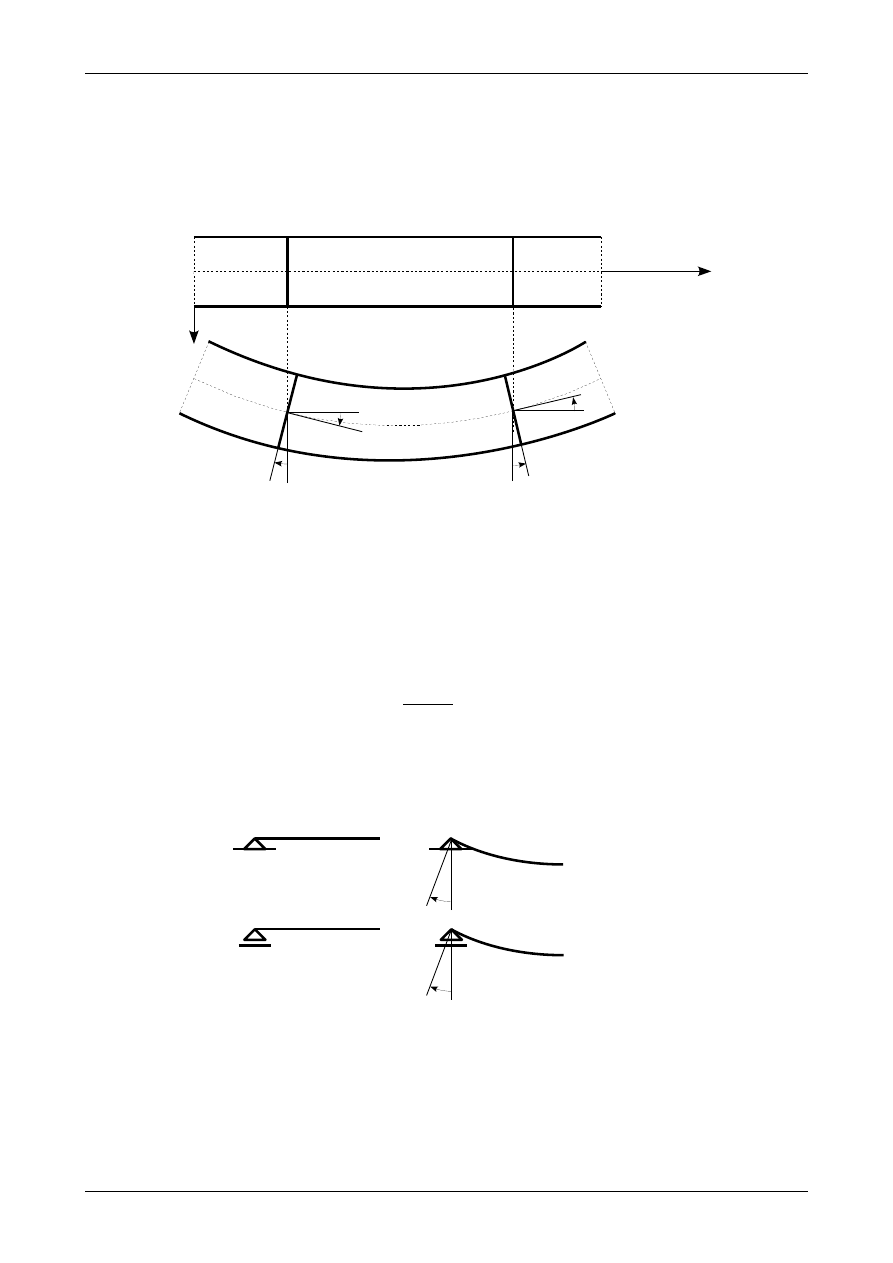
Oprócz linii ugięcia będzie ważny także wykres funkcji kąta obrotu przekroju pręta. Jak wiadomo
przekrój pręta jest zawsze prostopadły do osi pręta zarówno przed przyłożeniem obciążenia jak i po.
Rysunek 12.6 przedstawia fragment pręta przed przyłożeniem i po przyłożeniu obciążenia. Oba przekroje,
Dr inż. Janusz Dębiński
WM
12. PRZEMIESZCZENIA W BELKACH
3
które przed przyłożeniem obciążenia były pionowe obróciły się. Jeden z przekrojów obrócił się o kąt
φ
1
a drugi o kąt
φ
2
. Na rysunku 12.6 zaznaczony jest układ współrzędnych ZX. Jeżeli obrót przekroju pręta
nastąpi od osi X do osi Z to taki kąt obrotu jest dodatni natomiast jeżeli obrót przekroju pręta nastąpi
od osi Z do osi X to taki kąt obrotu jest kątem ujemnym. Jak widać na rysunku 12.6 kąt
φ
1
jest dodatni
(obrót od osi X do osi Z) natomiast kąt
φ
2
jest ujemny (obrót od osi Z do osi X). Jednostką kąta obrotu jest
radian.
X
Z
φ
2
φ
2
<0
φ
1
>0
φ
1
Rys. 12.6. Interpretacja kąta obrotu przekroju pręta
Na rysunku 12.6 pokazane jest, że kąt obrotu przekroju jest także kątem nachylenia stycznej do linii
ugięcia. Jak wiadomo z rachunku różniczkowego tangens kąta nachylenia stycznej do wykresu funkcji
w punkcie równa się wartości pochodnej funkcji w tym punkcie. Ponieważ kąty obrotu przekroju pręta są
wielkością bardzo małą możemy przyjąć, że tangens kąta obrotu przekroju pręta równa się samemu kątowi
obrotu wyrażonemu w radianach. Możemy więc ogólnie zapisać, że
x=
d w x
d x
.
(12.3)
Przy rozwiązywaniu zadań z wyznaczania ugięć bardzo potrzebne będą informacje o ugięciach i ką-
tach obrotów na różnego rodzaju więzach. Informacje te nazywają się warunkami brzegowymi.
w = 0
φ
≠ 0
w = 0
φ
≠ 0
φ
φ
Rys. 12.7. Warunki brzegowe dla podpór przegubowo- przesuwnej i przegubowo-nieprzesuwnej na końcu belki
Na rysunku 12.7 przedstawione są warunki brzegowe dla podpór przegubowo-przesuwnej i przegu-
bowo-nieprzesuwnej na końcu belki. Jak widać dla tych podpór ugięcie w wynosi zawsze zero natomiast kąt
obrotu jest w ogólnym przypadku różny od zera.
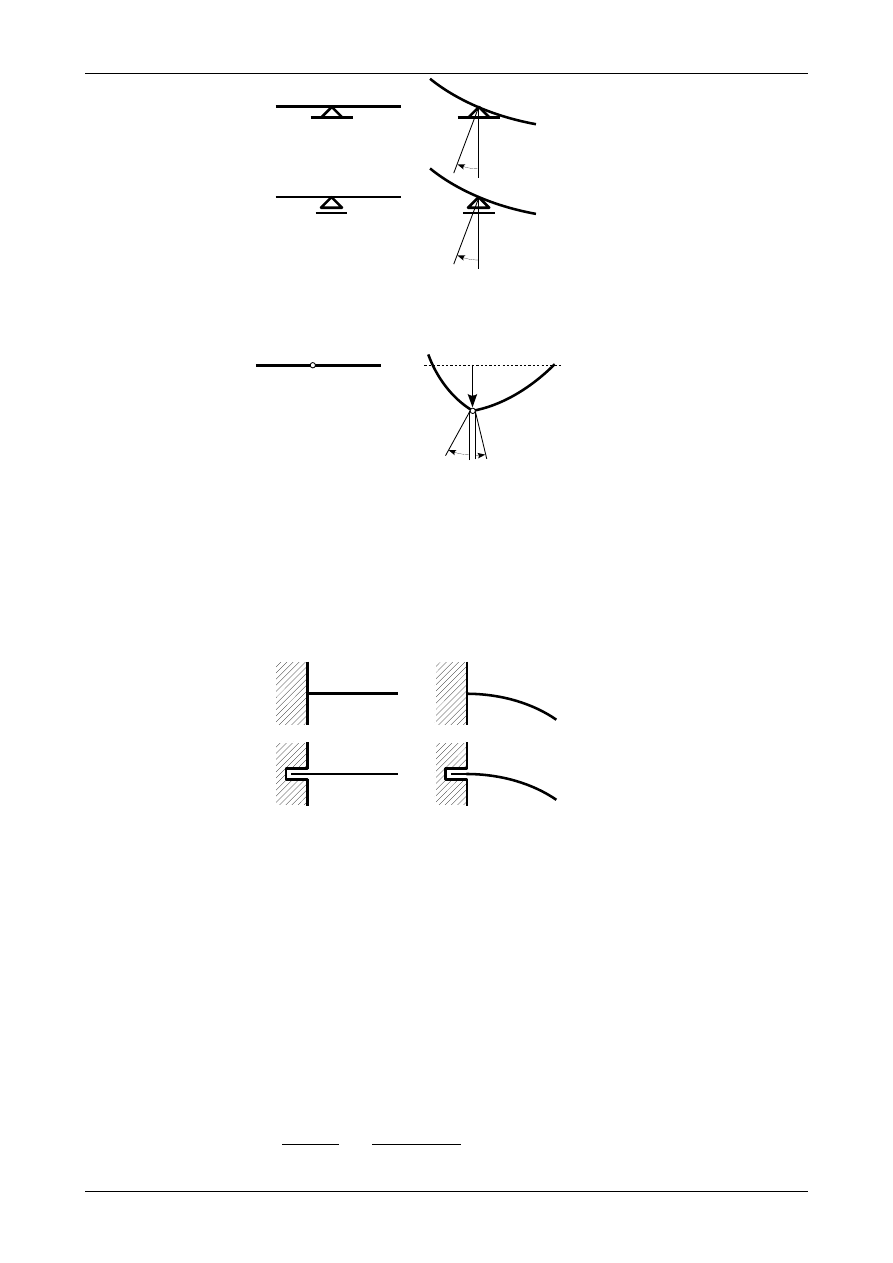
Na rysunku 12.8 przedstawione są warunki brzegowe dla podpór przegubowo-przesuwnej i przegu-
bowo-nieprzesuwnej na długości belki. Jak widać dla tych podpór ugięcie w wynosi zawsze zero natomiast
kąt obrotu jest w ogólnym przypadku różny od zera.
Dr inż. Janusz Dębiński
WM
12. PRZEMIESZCZENIA W BELKACH
4
w = 0
φ
≠ 0
w = 0
φ
≠ 0
φ
φ
Rys. 12.8. Warunki brzegowe dla podpór przegubowo- przesuwnej i przegubowo-nieprzesuwnej na długości belki
v
w ≠ 0
φ
L
≠ 0
φ
P
≠ 0
φ
L
≠
φ
P
φ
L
φ
P
Rys. 12.9. Warunki brzegowe dla przegubu łączącego dwie belki proste
Rysunek 12.9 przedstawia warunki brzegowe dla przegubu łączącego dwie belki proste. Jak widać
ugięcie w przegubie jest w ogólnym przypadku różne od zera. W przegubie będziemy mieli dwa kąty obrotu:
z lewej strony
φ
L
oraz z prawej strony
φ
P
. Jak widać oba kąty są w ogólnym przypadku różne od zera oraz
oba są od siebie różne.
w = 0
φ
= 0
w = 0
φ
= 0
Rys. 12.10. Warunki brzegowe dla podpory teleskopowej i utwierdzenia
Ostatnimi podporami, dla których określimy warunki brzegowe są podpora teleskopowa oraz utwier-
dzenie. Dla tych podpór ugięcie oraz kąt obrotu są zawsze równe zero. Podpory te oraz warunki brzegowe na
nich przedstawia rysunek 12.10.
12.2. Równanie różniczkowe linii ugięcia
Na ugięcia w belkach wpływ mają siła poprzeczna i moment zginający. Jednak wpływ siły pop-
rzecznej wynosi tylko kilka procent i w niniejszym kursie pominiemy go. Zależność pomiędzy funkcją
ugięcia w(x) a funkcją momentu zginającego M(x)=M
Y
(x) nazywa się równaniem różniczkowym linii
ugięcia i ma postać
d
2
w x
d x
2
=−
M x
E x ⋅J
Y
x
=−
x
,
(12.4)
Dr inż. Janusz Dębiński
WM
12. PRZEMIESZCZENIA W BELKACH
5
w którym E(x) jest funkcją wartości modułu Younga od położenia, J
Y
(x) jest funkcją momentu bezwładności
względem osi Y=Y
gl
od położenia natomiast
κ
oznacza krzywiznę osi belki. Ze względu na to, że będziemy
rozpatrywać belki wykonane z materiału izotropowego mającego w każdym punkcie te same właściwości
więc moduł Younga będzie miał wartość stałą a równanie różniczkowe równowagi będzie miało postać
d
2
w x
d x
2
=−
M x
E⋅J
Y
x
=−
x
.
(12.5)
Jeżeli pewien odcinek belki będzie prętem pryzmatycznym czyli moment bezwładności będzie stały rów-
nanie różniczkowe równowagi będzie miało postać
d
2
w x
d x
2
=−
M x
E⋅J
Y
=−
x
.
(12.6)
Iloczyn modułu Younga oraz momentu bezwładności nazywamy sztywnością przekroju na zginanie.
Jednostką sztywności jest
[
kPa⋅m
4
]
=
[
kN
m
2
⋅
m
4
]
=
[
kN⋅m
2
]
.
(12.7)
Chcąc wyznaczyć postać linii ugięcia w(x) i funkcję kąta obrotu przekroju pręta
φ
(x) należy równanie (12.4)
lub (12.5), lub (12.6) dwukrotnie scałkować. Przy całkowaniu potrzebne będą warunki brzegowe zaprezen-
towane wcześniej oraz pojawią się dwie stałe całkowania.
12.3. Wyznaczenie ugięć metodą bezpośredniego całkowania
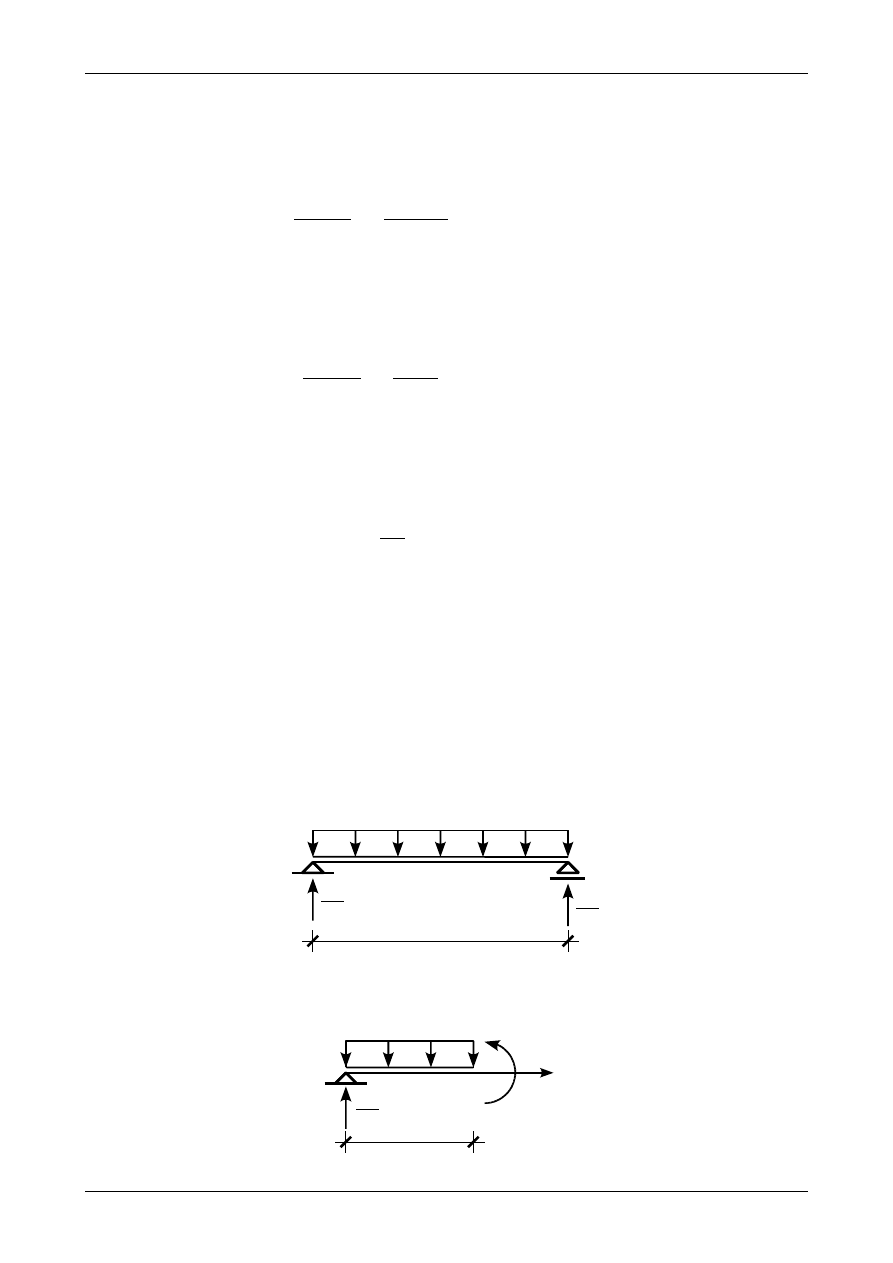
Jako przykład wyznaczenia ugięć obliczmy linię ugięcia i funkcję kąta obrotu dla belki swobodnie
podpartej przedstawionej na rysunku 12.11. Na rysunku tym zaznaczone są także reakcje w belce.
q
L
q⋅L
2
q⋅L
2
Rys. 12.11. Belka swobodnie podparta
q
x
M(x)
q⋅L
2
X
Rys. 12.12. Równowaga odciętej części belki swobodnie podpartej z obciążeniem ciągłym równomiernie rozłożonym
Dr inż. Janusz Dębiński
WM
12. PRZEMIESZCZENIA W BELKACH
6
Rysunek 12.12 przedstawia równowagę odciętej części belki, z której to wyznaczymy postać funkcji
momentu zginającego. Dodatni moment zginający będzie rozciągał dolną część przekroju pręta. Moment
zginający wynosi więc
M x =
q⋅L
2
⋅
x−q⋅x⋅
x
2
=
q⋅L
2
⋅
x −
q⋅x
2
2
.
(12.8)
Belka jest prętem pryzmatycznym więc równanie różniczkowe równowagi będzie miało postać
E⋅J
Y
⋅
d
2
w x
d x
2
=
q⋅x
2
2
−
q⋅L
2
⋅
x
.
(12.9)
Po pierwszym całkowaniu otrzymamy funkcję kąta obrotu, która będzie miała następującą postać
E⋅J
Y
⋅
d w x
d x
=
E⋅J
Y
⋅
x=
q⋅x
3
6
−
q⋅L
4
⋅
x
2
C
.
(12.10)
We wzorze (12.10) C oznacza pierwszą stałą całkowania. Po drugim całkowaniu otrzymamy funkcję linii
ugięcia w postaci
E⋅J
Y
⋅
w x=
q⋅x
4
24
−
q⋅L
12
⋅
x
3
C⋅xD
,
(12.11)
w którym D oznacza drugą stałą całkowania. Chcąc wyznaczyć wartości stałych całkowania należy wstawić
do równań (12.10) lub (12.11) dwa warunki brzegowe. Patrząc na rysunek 12.11 widać, że ugięcia nad
podporami wynoszą zero czyli otrzymamy
w0=0
w L=0
.
(12.12)
Podstawiając warunek pierwszy do równania (12.11) otrzymamy
q⋅0
4
24
−
q⋅L
12
⋅
0
3
C⋅0D=0
,
(12.13)
czyli stała D wynosi jak widać zero. Zajmijmy się jeszcze jednostką tej stałej. Patrząc na równanie (12.11)
widać, że stała D musi mieć ten sam wymiar co iloczyn sztywności przekroju i ugięcia czyli
[
kN⋅m
2
⋅
m
]
=
[
kN⋅m
3
]
.
(12.14)
Podstawiając warunek drugi do równania (12.11) otrzymamy
Dr inż. Janusz Dębiński
WM
12. PRZEMIESZCZENIA W BELKACH
7
q⋅L
4
24
−
q⋅L
12
⋅
L
3
C⋅L=0
.
(12.15)
W równaniu (12.15) zostało już uwzględnione, że stała D wynosi zero. Z równania (12.15) stała C wynosi
C=
q⋅L
3
24
.
(12.16)
Zajmijmy się jeszcze jednostką tej stałej. Patrząc na równanie (12.10) widać, że stała C musi mieć ten sam
wymiar co iloczyn sztywności przekroju i kąta obrotu przekroju. Kąt obrotu jak wiadomo jest wyrażony
w radianach, które tutaj możemy traktować jako jednostkę bezwymiarową czyli stała C ma ostatecznie
jednostkę
[
kN⋅m
2
]
.
(12.17)
Po uwzględnieniu stałych całkowania funkcje kąta obrotu i linii ugięcia mają postacie
x=
1
E⋅J
Y
⋅
q⋅x
3
6
−
q⋅L
4
⋅
x
2
q⋅L
3
24
,
(12.18)
w x =
1
E⋅J
Y
⋅
q⋅x
4
24
−
q⋅L
12
⋅
x
3
q⋅L
3
24
⋅
x
.
(12.19)
Kąty obrotu przekrojów pręta na obu końcach belki wynoszą
0=
1
E⋅J
Y
⋅
q⋅0
3
6
−
q⋅L
4
⋅
0
2
q⋅L
3
24
=
q⋅L
3
24⋅E⋅J
Y
,
(12.20)
L=
1
E⋅J
Y
⋅
q⋅L
3
6
−
q⋅L
4
⋅
L
2
q⋅L
3
24
=−
q⋅L
3
24⋅E⋅J
Y
.
(12.21)
Miejsce zerowe funkcji kąta obrotu przekroju pręta znajduje się w miejscu
x
0
=
L
2
.
(12.22)
Rysunek 12.13 przedstawia wykres funkcji kąta obrotu przekroju na długości belki. Ugięcia belki na obu
końcach wynoszą
w0=0
,
(12.23)
Dr inż. Janusz Dębiński
WM
12. PRZEMIESZCZENIA W BELKACH
8
w L=
1
E⋅J
Y
⋅
q⋅L
4
24
−
q⋅L
12
⋅
L
3
q⋅L
3
24
⋅
L
=
0
.
(12.24)
Czyli jest to zgodne z warunkami brzegowymi (12.12). Ugięcie w środku belki czyli w miejscu zerowym
funkcji kąta obrotu przekroju wynosi
w
L
2
=
1
E⋅J
Y
⋅
[
q
24
⋅
L
2
4
−
q⋅L
12
⋅
L
2
3
q⋅L
3
24
⋅
L
2
]
=
5
384
⋅
q⋅L
4
E⋅J
Y
.
(12.25)
Rysunek 12.13 przedstawia wykres linii ugięcia. Funkcja kąta obrotu posiada ekstremum w miejscu zero-
wym funkcji momentu zginającego M(x) natomiast linia ugięcia posiada ekstremum w miejscu zerowym
funkcji kąta obrotu przekroju pręta.
q
L
T(x)
M(x)
0,0
0,0
L
2
L
2
L
2
L
2
q⋅L
2
q⋅L
2
q⋅L
2
q⋅L
2
q⋅L
2
8
φ
(x)
w(x)
0,0
0,0
L
2
L
2
L
2
L
2
q⋅L
3
24⋅E⋅J
Y
q⋅L
3
24⋅E⋅J
Y
5
384
⋅
q⋅L
4
E⋅J
Y
Rys. 12.13. Wykresy funkcji kąta obrotu przekroju pręta oraz linii ugięcia
Belka przedstawiona powyżej składała się z jednego przedziału. W przypadku belek składających się
z wielu przedziałów należy obliczenia przeprowadzić we wszystkich przedziałach osobno zapisując odpo-
Dr inż. Janusz Dębiński
WM
12. PRZEMIESZCZENIA W BELKACH
9
wiednie funkcje momentu zginającego M(x) i całkując każde z osobna otrzymać funkcję kąta obrotu
przekroju pręta oraz linię ugięcia. Na rysunku 12.14 przedstawiona jest belka składająca się z trzech
przedziałów.
q
A
B
C
D
P
V
A
V
D
b
a
c
Rys. 12.14. Belka swobodnie podparta składająca się z trzech przedziałów
q
A
V
A
x
1
X
1
M
1
(x
1
)
Rys. 12.15. Równowaga w przedziale AB
W przedziale AB jako zmienną będziemy mieli x
1
. Równowagę odciętej części belki w przedziale AB
przedstawia rysunek 12.15. Równanie różniczkowe linii ugięcia w przedziale AB będzie miało postać
d
2
w
1
x
1
d x
1
2
=−
M
1
x
1
E⋅J
Y
1
.
(12.26)
Po pierwszym całkowaniu otrzymamy funkcję kąta obrotu przekroju w postaci
E⋅J
Y
1
⋅
d w
1
x
1
d x
1
=
E⋅J
Y
1
⋅
1
x
1
=
...C
1
.
(12.27)
Po drugim całkowaniu otrzymamy linię ugięcia w postaci
E⋅J
Y
1
⋅
w
1
x
1
=
...C
1
⋅
x
1
D
1
.
(12.28)
W równaniach (12.27) i (12.28) występują dwie stałe całkowania C
1
oraz D
1
.
W przedziale BC jako zmienną będziemy mieli x
2
. Równowagę odciętej części belki w przedziale BC
przedstawia rysunek 12.16. Równanie różniczkowe linii ugięcia w przedziale BC będzie miało postać
d
2
w
2
x
2
d x
2
2
=−
M
2
x
2
E⋅J
Y
2
.
(12.29)
Dr inż. Janusz Dębiński
WM
12. PRZEMIESZCZENIA W BELKACH
10
q
a
A
B
V
A
M
2
(x
2
)
x
2
X
2
Rys. 12.16. Równowaga w przedziale BC
Po pierwszym całkowaniu otrzymamy funkcję kąta obrotu przekroju w postaci
E⋅J
Y
2
⋅
d w
2
x
2
d x
2
=
E⋅J
Y
2
⋅
2
x
2
=
...C
2
.
(12.30)
Po drugim całkowaniu otrzymamy linię ugięcia w postaci
E⋅J
Y
2
⋅
w
2
x
2
=
...C
2
⋅
x
2
D
2
.
(12.31)
W równaniach (12.30) i (12.31) występują dwie stałe całkowania C
2
oraz D
2
.
q
a
A
B
C
P
V
A
b
x
3
M
3
(x
3
)
X
3
Rys. 12.17. Równowaga w przedziale CD
W przedziale CD jako zmienną będziemy mieli x
3
. Równowagę odciętej części belki w przedziale CD
przedstawia rysunek 12.17. Równanie różniczkowe linii ugięcia w przedziale CD będzie miało postać
d
2
w
3
x
3
d x
3
2
=−
M
3
x
3
E⋅J
Y
3
.
(12.32)
Po pierwszym całkowaniu otrzymamy funkcję kąta obrotu przekroju w postaci
E⋅J
Y
3
⋅
d w
3
x
3
d x
3
=
E⋅J
Y
3
⋅
3
x
3
=
...C
3
.
(12.33)
Po drugim całkowaniu otrzymamy linię ugięcia w postaci
E⋅J
Y
3
⋅
w
3
x
3
=
...C
3
⋅
x
3
D
3
.
(12.34)
Dr inż. Janusz Dębiński

WM
12. PRZEMIESZCZENIA W BELKACH
11
W równaniach (12.33) i (12.34) występują dwie stałe całkowania C
3
oraz D
3
. Ogółem mamy sześć stałych
całkowania. Potrzebujemy więc sześciu warunków brzegowych. Pierwsze dwa to warunki brzegowe na
podporach czyli
w
1
x
1
=
0=0
,
(12.35)
w
3
x
3
=
c=0
.
(12.36)
Następne dwa warunki wiążą się z ciągłością funkcji kąta obrotu przekroju pręta. Kąty obrotów w punktach
B i C z lewej i prawej strony są sobie równe. Otrzymamy warunki brzegowe w postaci
1
x
1
=
a =
2
x
2
=
0
,
(12.37)
2
x
2
=
b=
3
x
3
=
0
.
(12.38)
Ostatnie dwa warunki brzegowe są związane z ciągłością linii ugięcia (belka oczywiście nie może ulec
przerwaniu). Otrzymamy warunki brzegowe w postaci
w
1
x
1
=
a=w
2
x
2
=
0
,
(12.39)
w
2
x
2
=
b=w
3
x
3
=
0
.
(12.40)
Podstawiając warunki brzegowe (12.35) do (12.40) do równań (12.27), (12.28), (12.30), (12.31), (12.33)
oraz (12.34) otrzymamy układ sześciu równań, w którym niewiadomymi są stałe C
1
, D
1
, C
2
, D
2
, C
3
i D
3
.
Rozwiązując go otrzymamy wszystkie sześć stałych. Jak widać jest to sposób bardzo uciążliwy. Liczbę
stałych możemy zredukować do dwóch lecz musimy w specyficzny sposób zapisać wyrażenie na moment
zginający M(x). Sposób ten został zaproponowany przez Alfreda Clebscha.
12.4. Wyznaczanie ugięć metodą Clebscha
Na początek przyjmiemy, że że belka jest wykonana z pręta pryzmatycznego czyli posiada stały
moment bezwładności J
Y
. Dodatkowo obciążenie ciągłe ograniczymy tylko do przypadku obciążenia
ciągłego równomiernie rozłożonego. Metoda Clebscha pozwala na zredukowanie liczby stałych całkowania
do dwóch bez względu na liczbę przedziałów z obciążeniem na belce. Konieczne jest jednak przestrzeganie
kilku zasad przy zapisie równania momentu zginającego i jego całkowaniu.
Na początek należy przyjąć początek układu ZX w lewym końcu belki. Wyrażenie na moment
zginający w dowolnym przedziale musi być wyrażone zawsze przez siły działające na lewą odciętą część
belki.
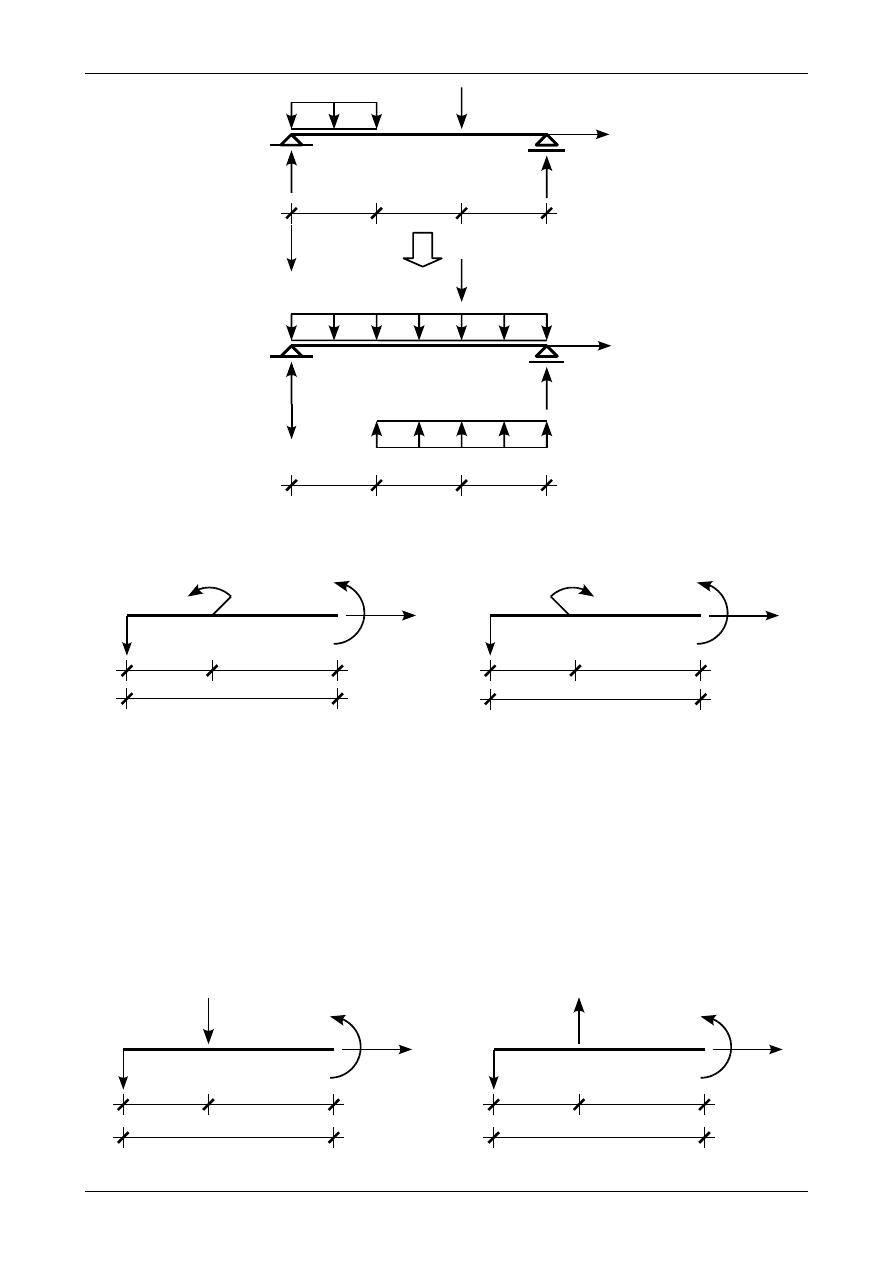
Zapisując wyrażenie na moment zginający w dowolnym przedziale musimy uwzględnić w postaci nie-
zmienionej wszystkie człony wyrażenia na moment zginający w przedziałach poprzednich. Jeżeli obciążenie
ciągłe równomiernie rozłożone kończy się przed końcem belki to musimy je przedłużyć do samego końca
belki a w przedziałach, w których to obciążenie nie działa należy dodać obciążenie o tej samej wartości lecz
przeciwnie skierowane. Przedstawia to rysunek 12.18.
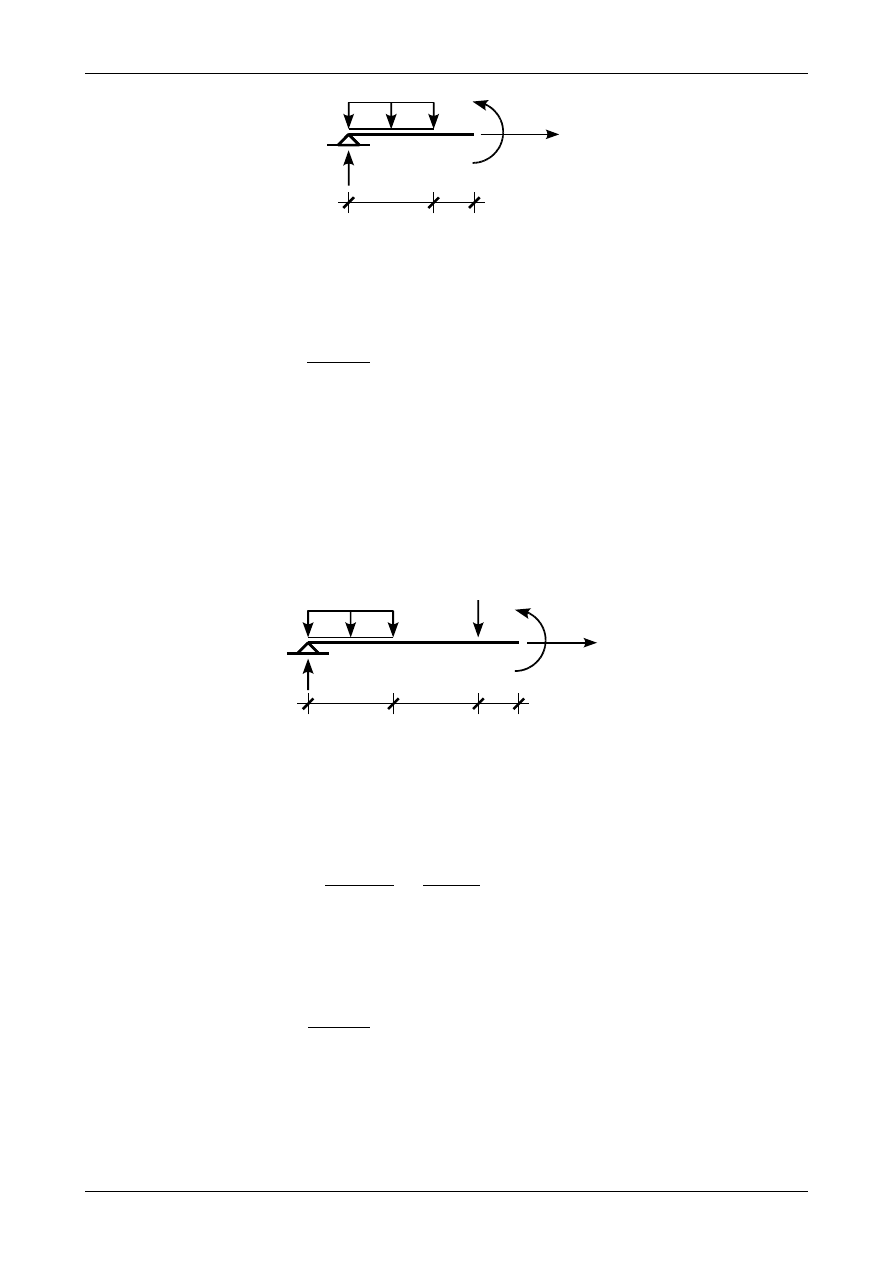
Rysunek 12.19 a) przedstawia moment skupiony M
0
mający zwrot przeciwny do ruchu wskazówek
zegara działający w punkcie o współrzędnej x równej a. Wyrażenie na moment zginający będzie miało
postać
Dr inż. Janusz Dębiński
WM
12. PRZEMIESZCZENIA W BELKACH
12
q
A
B
C
D
P
V
A
V
D
b
a
c
q
A
B
C
D
P
V
A
b
a
c
q
V
D
X
Z=w
X
Z=w
Rys. 12.18. Statycznie równoważne obciążenie ciągłe równomiernie rozłożone w metodzie Clebscha
a
M(x)
X
x-a
x
M
0
a
M(x)
X
x-a
x
M
0
Z
Z
a)
b)
Rys. 12.19. Moment zginający od momentu skupionego na belce
M x =−M
0
⋅
x−a
0
.
(12.41)
Rysunek 12.19 b) przedstawia moment skupiony M
0
mający zwrot zgodny z ruchem wskazówek zegara
działający w punkcie o współrzędnej x równej a. Wyrażenie na moment zginający będzie miało postać
M x=M
0
⋅
x−a
0
.
(12.42)
a
M(x)
X
x-a
x
P
a
M(x)
X
x-a
x
P
Z
Z
a)
b)
Rys. 12.20. Moment zginający od siły skupionej
Dr inż. Janusz Dębiński
WM
12. PRZEMIESZCZENIA W BELKACH
13
Rysunek 12.20 a) przedstawia siłę skupioną P działającą w dół w punkcie o współrzędnej x równej a.
Wyrażenie na moment zginający będzie miało postać
M x =−P⋅
x−a
1
.
(12.43)
Rysunek 12.20 b) przedstawia siłę skupioną P działającą do góry w punkcie o współrzędnej x równej a.
Wyrażenie na moment zginający będzie miało postać
M x=P⋅
x−a
1
.
(12.44)
a
M(x)
X
x-a
x
q
a
M(x)
X
x-a
x
q
Z
Z
a)
b)
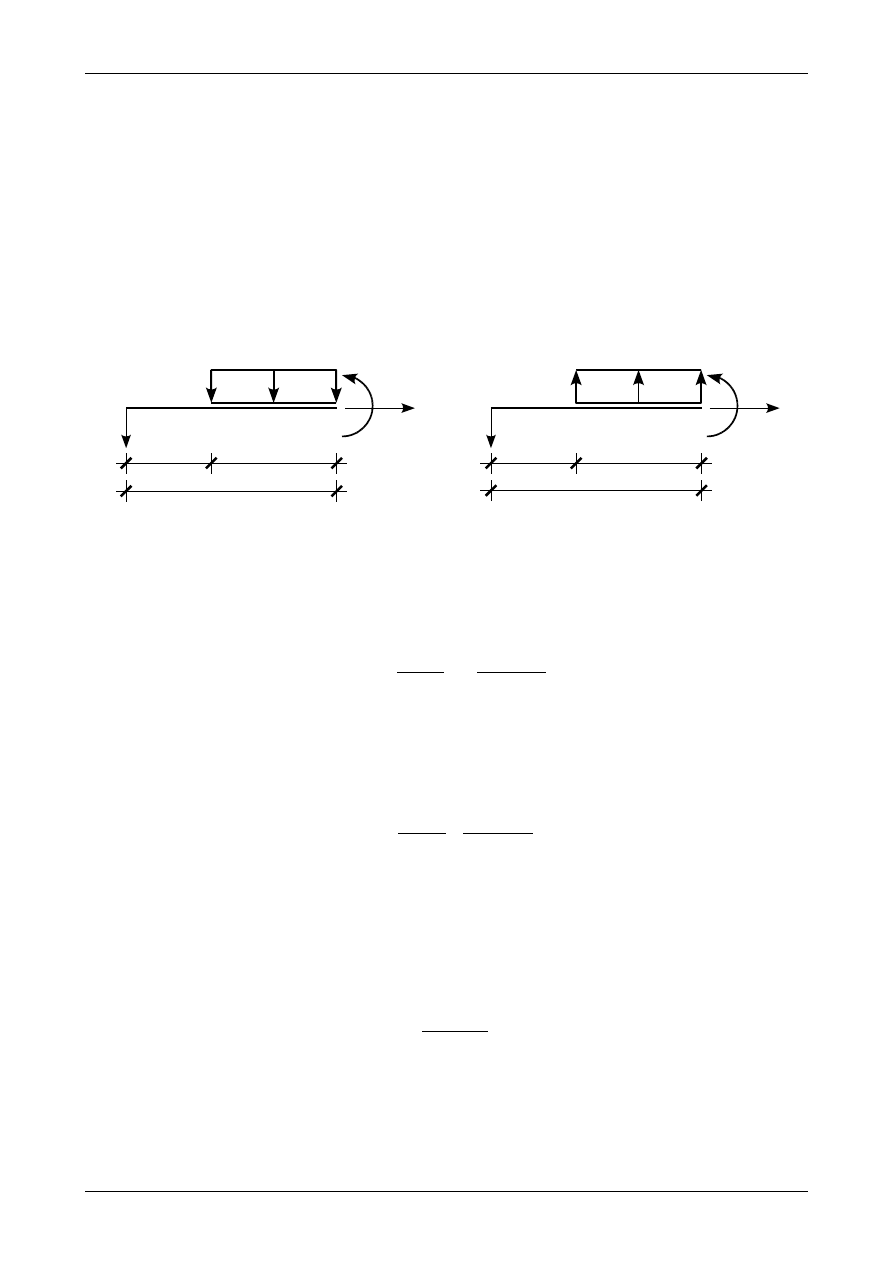
Rys. 12.21. Moment zginający od obciążenia ciągłego równomiernie rozłożonego
Rysunek 12.21 a) przedstawia obciążenie ciągłe równomiernie rozłożone działające w dół i zaczy-
nające się w punkcie o współrzędnej x równej a. Wyrażenie na moment zginający będzie miało postać
M x =−q⋅
x−a
⋅
x−a
2
=−
q⋅
x−a
2
2
.
(12.45)
Rysunek 12.21 b) przedstawia obciążenie ciągłe równomiernie rozłożone działające do góry i zaczynające
się w punkcie o współrzędnej x równej a. Wyrażenie na moment zginający będzie miało postać
M x=q⋅
x−a
⋅
x−a
2
=
q⋅
x−a
2
2
.
(12.46)
Mając już zapisaną postać momentu zginającego możemy zacząć całkować. Należy pamiętać o tym,
że stałe C i D zapisujemy zawsze na początku wyrażenia czyli stałe te obowiązują w każdym
przedziale. Ponadto w trakcie całkowania nie wolno rozwijać wyrażeń w nawiasach czyli całkujemy według
wzoru
∫
x−a
n
⋅
dx=
x−a
n1
n1
.
(12.47)
Wyrażenia na moment zginający, funkcję kąta obrotu przekroju oraz linię ugięcia będziemy zapisywali od
razu dla całej belki. Kreskami będziemy zaznaczać, gdzie kończy się odpowiednie wyrażenie. Jeżeli jakiś
punkt będzie się znajdował w odpowiednim przedziale to wyrażenie na moment zginający, funkcję
kąta obrotu i linię ugięcia będzie obowiązywało tylko do kreski kończącej dany przedział. Innymi
słowy w równaniach tych odrzucamy człony, w których wyrażenia x-a w nawiasach przyjmują wartość
Dr inż. Janusz Dębiński
WM
12. PRZEMIESZCZENIA W BELKACH
14
ujemną lub zero. Przykłady zastosowania tej metody znajdują się w zadaniach załączonych do niniejszego
rozdziału.
12.5. Wyznaczanie ugięć metodą obciążenia krzywiznami
Metodą obciążeń krzywiznami będziemy wyznaczać ugięcia w określonych punktach. Opiera się ona
na podobieństwie różniczkowych równań równowagi oraz równań wynikających z równania różniczkowego
linii ugięcia. Tabela 12.1 przedstawia powyższe wzory. Z porównania wzorów w czwartym wierszu Tabeli
12.1 wynika, że jeżeli jako obciążenie przyjmiemy krzywiznę
κ
(x)
q
*
x =
M x
E⋅I
Y
x
=
x
(12.48)
to siła poprzeczna będzie równa kątowi obrotu przekroju pręta (trzeci wiersz Tabeli 12.1) natomiast moment
zginający będzie równy ugięciu (drugi wiersz Tabeli 12.1). Obciążenie q
*
(x) będziemy nazywali
obciążeniem wtórnym. Siłę poprzeczną równą kątowi obrotu przekroju pręta będziemy nazywali wtórną
siłą poprzeczną. Moment zginający równy ugięciu będziemy nazywali wtórnym momentem zginającym.
Kąt obrotu będzie więc wynosił
x =T
*
x
.
(12.49)
We wzorze (12.49) T
*
oznacza właśnie wtórną siłę poprzeczną. Ugięcie będzie więc wynosiło
w x=M
*
x
.
(12.50)
We wzorze (12.50) M
*
oznacza właśnie wtórny moment zginający. Analizując wzór (12.49) dochodzimy do
wniosku, że jednostką wtórnej siły poprzecznej będzie wielkość bezwymiarowa. Analizując wzór
(12.50) dochodzimy do wniosku, że jednostką wtórnego momentu zginającego jest metr.
Tabela. 12.1. Różniczkowe równania równowagi i różniczkowe równanie linii ugięcia
Różniczkowe równania równowagi
Różniczkowe równanie linii ugięcia
M x
w x
d M x
d x
=
T x
d w x
d dx
=
x
dT x
d x
=
d
2
M x
d x
2
=−
q x
d
2
w x
d x
2
=−
M x
E⋅I
Y
x
=−
x
Obciążeniem wtórnym q
*
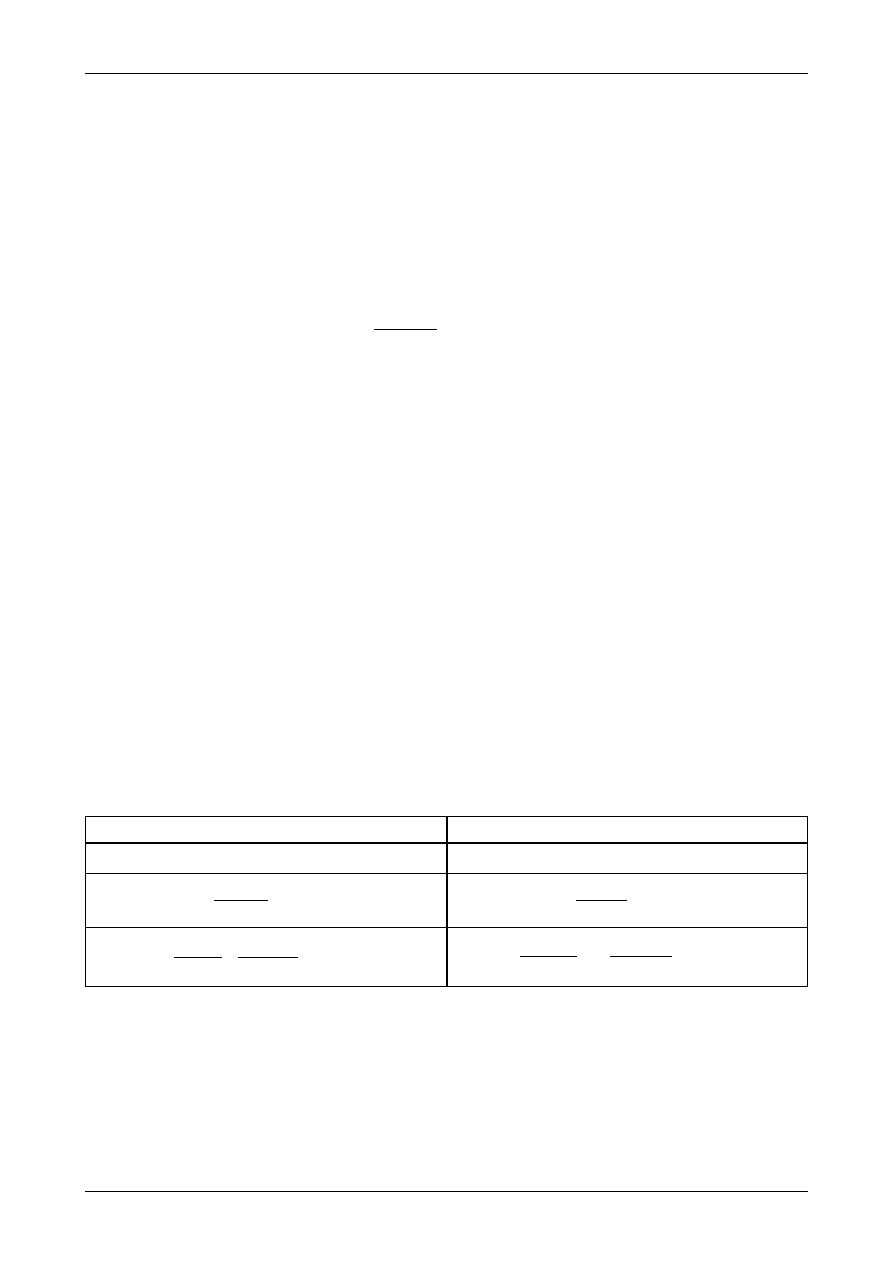
(x) nie możemy obciążać belki rzeczywistej, ponieważ nie byłyby spełnione
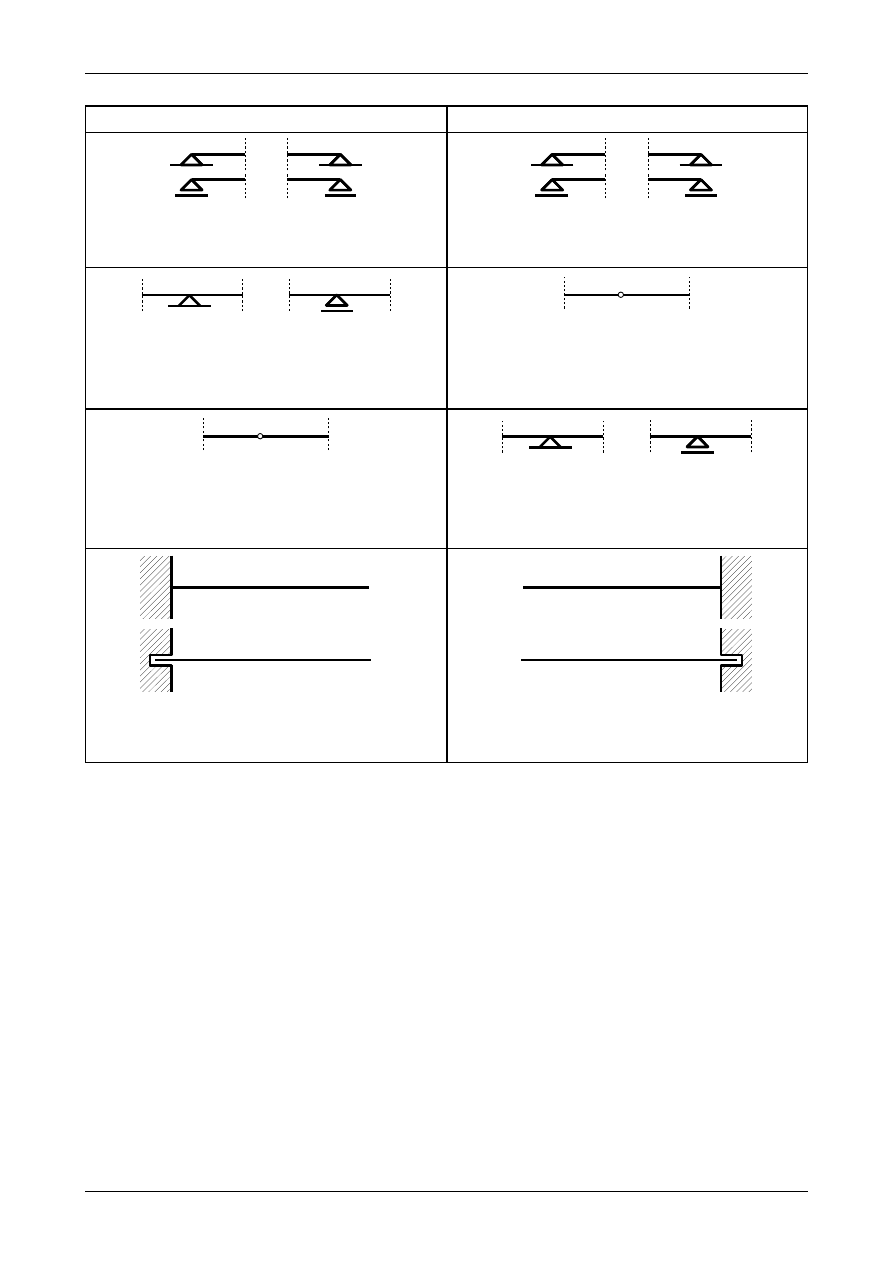
warunki brzegowe. Musimy obciążać belkę nazywaną belką fikcyjną. Tabela 12.2 przedstawia podpory
w belce rzeczywistej i odpowiadające im podpory w belce fikcyjnej. Jak widać podpora przegubowa na
końcu belki przechodzi w podporę przegubową. Podpora przegubowa na długości belki przechodzi
w przegub rzeczywisty. Przegub rzeczywisty na długości belki przechodzi w podporę przegubową. Pełne
utwierdzenie i podpora teleskopowa przechodzi w wolny koniec natomiast wolny koniec przechodzi albo
w utwierdzenie albo w podporę teleskopową. Podpory w belce fikcyjnej muszą być tak dobrane aby
spełniony był warunki konieczny i dostateczne geometrycznej niezmienności.
Dr inż. Janusz Dębiński
WM
12. PRZEMIESZCZENIA W BELKACH
15
Tabela 12.2. Podpory w belce rzeczywistej i fikcyjnej.
Belka rzeczywista
Belka fikcyjna
A
A
A
A
A
A
A
A
w
A
=
0
A
≠
0
M
A
*
=
0
T
A
*
≠
0
B
B
B
w
B
=
0
B
L
=
B
P
B
L
≠
0 ,
B
P
≠
0
M
B
*
=
0
T
B
*(L)
=
T
B
*(P)
T
B
*(L)
≠
0 , T
B
*(P)
≠
0
B
B
B
w
B
≠
0
B
L
≠
B
P
B
L
≠
0 ,
B
P
≠
0
M
B
*
≠
0
T
B
*(L)
≠
T
B
*(P)
T
B
*(L)
≠
0, T
B
*(P)
≠
0
A
B
A
B
A
B
A
B
w
A
=
0
A
=
0
w
B
≠
0
B
≠
0
M
A
*
=
0
T
A
*
=
0
M
B
*
≠
0
T
B
*
≠
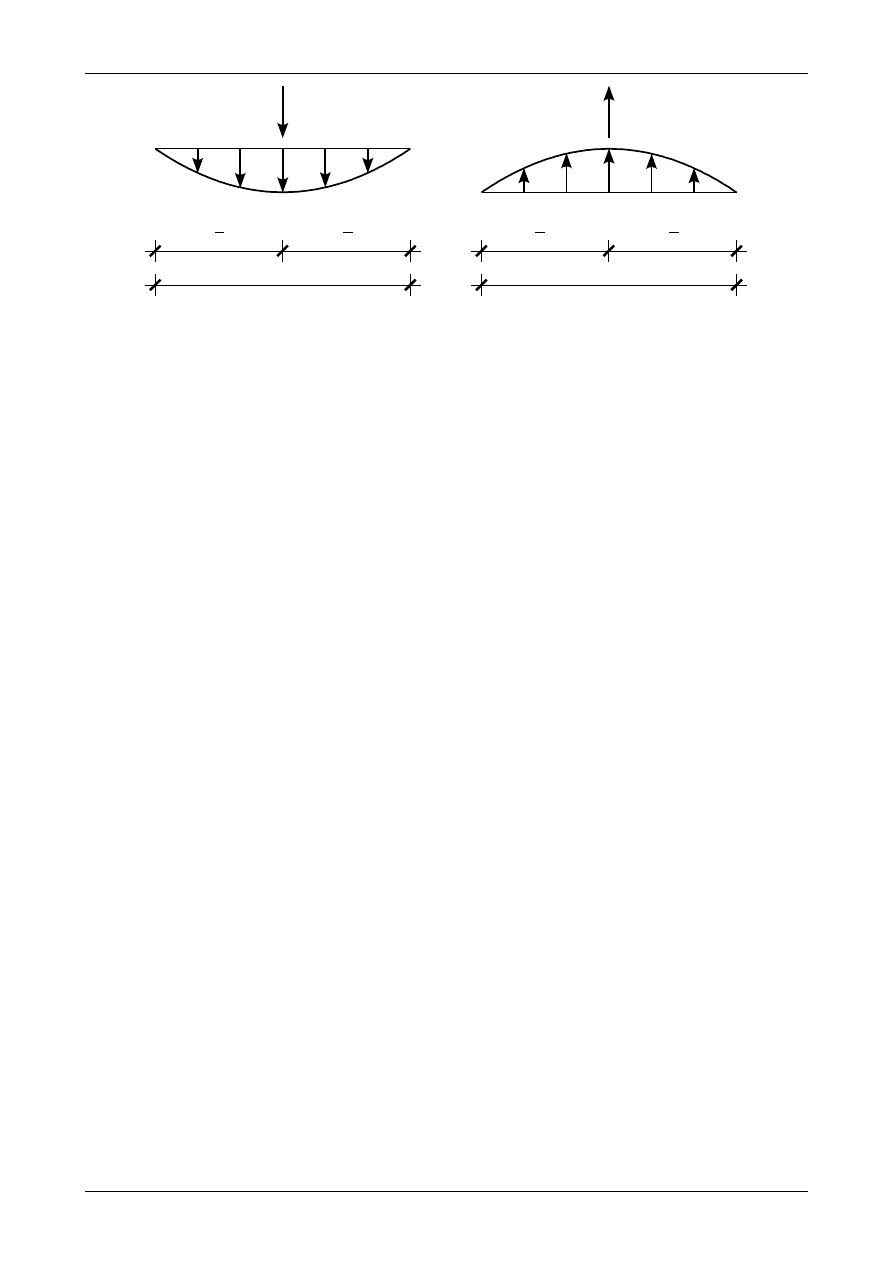
0
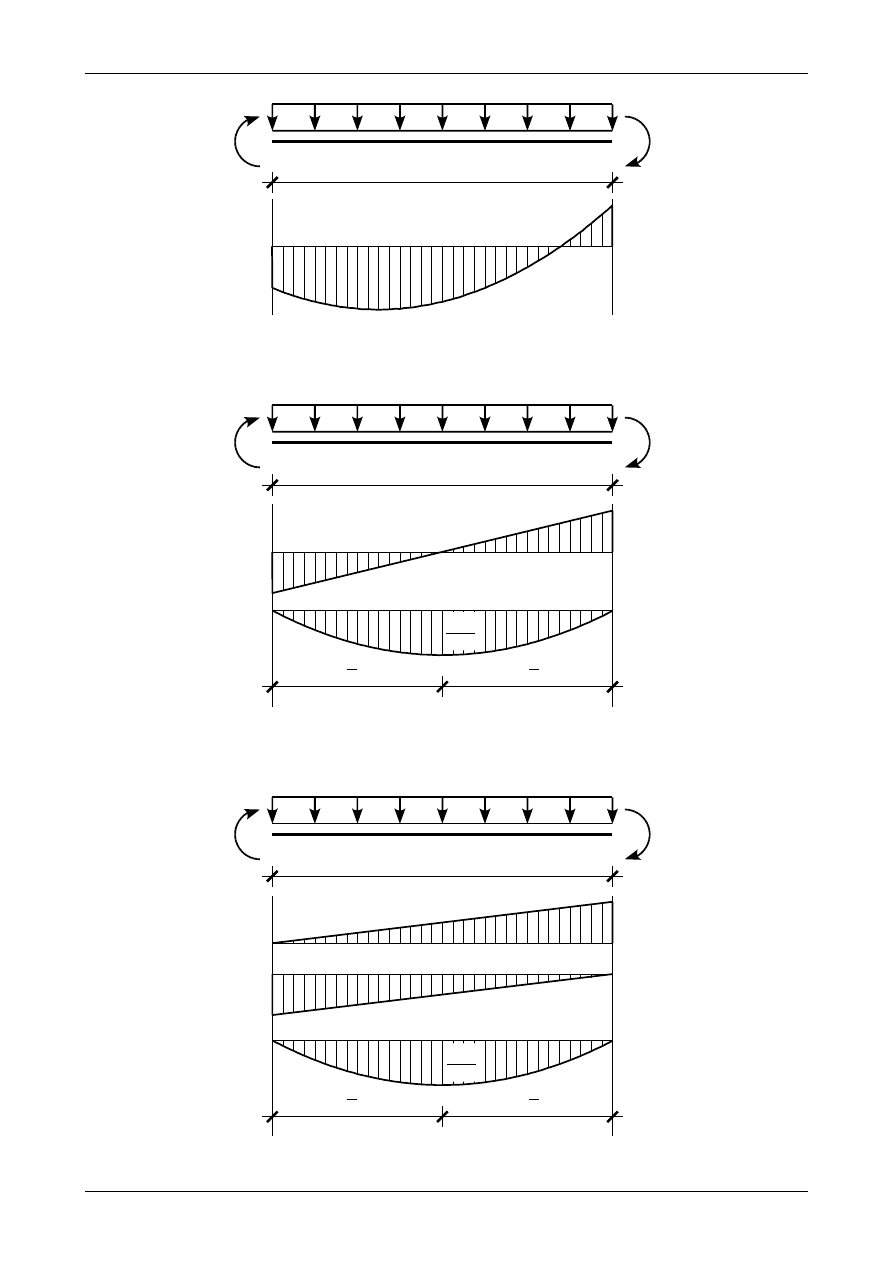
Pewnym problemem jest moment zginający w przedziale, w którym działa obciążenie ciągłe równo-
miernie rozłożone. Jak wiadomo wykres momentu zginającego jest w takim przypadku parabolą, dla której
należałoby za pomocą całek znaleźć wartość i położenie wypadkowej. Można jednak tego uniknąć. Rysunek
12.22 przedstawia wykres momentu zginającego w przedziale, w którym działa obciążenie ciągłe
równomiernie rozłożone. Na końcach tego przedziału momenty zginające wynoszą M
1
i M
2
. Jeden z nich
rozciąga dolną a drugi górną część belki. Łączymy te dwa punkty linią prostą i dodajemy wykres momentu
zginającego jak dla belki swobodnie popartej (rysunek 5.99). Otrzymamy wykresy przedstawione na
rysunku 12.23. Ostatnim etapem będzie przerobienie przewiniętego wykresu liniowego. W tym celu
łączymy punkt M
1
na lewym końcu z zerem na prawym końcu, a punkt M
2
na prawym końcu z zerem na
lewym końcu. W wyniku tego otrzymamy ostatecznie przerobiony wykres momentu zginającego
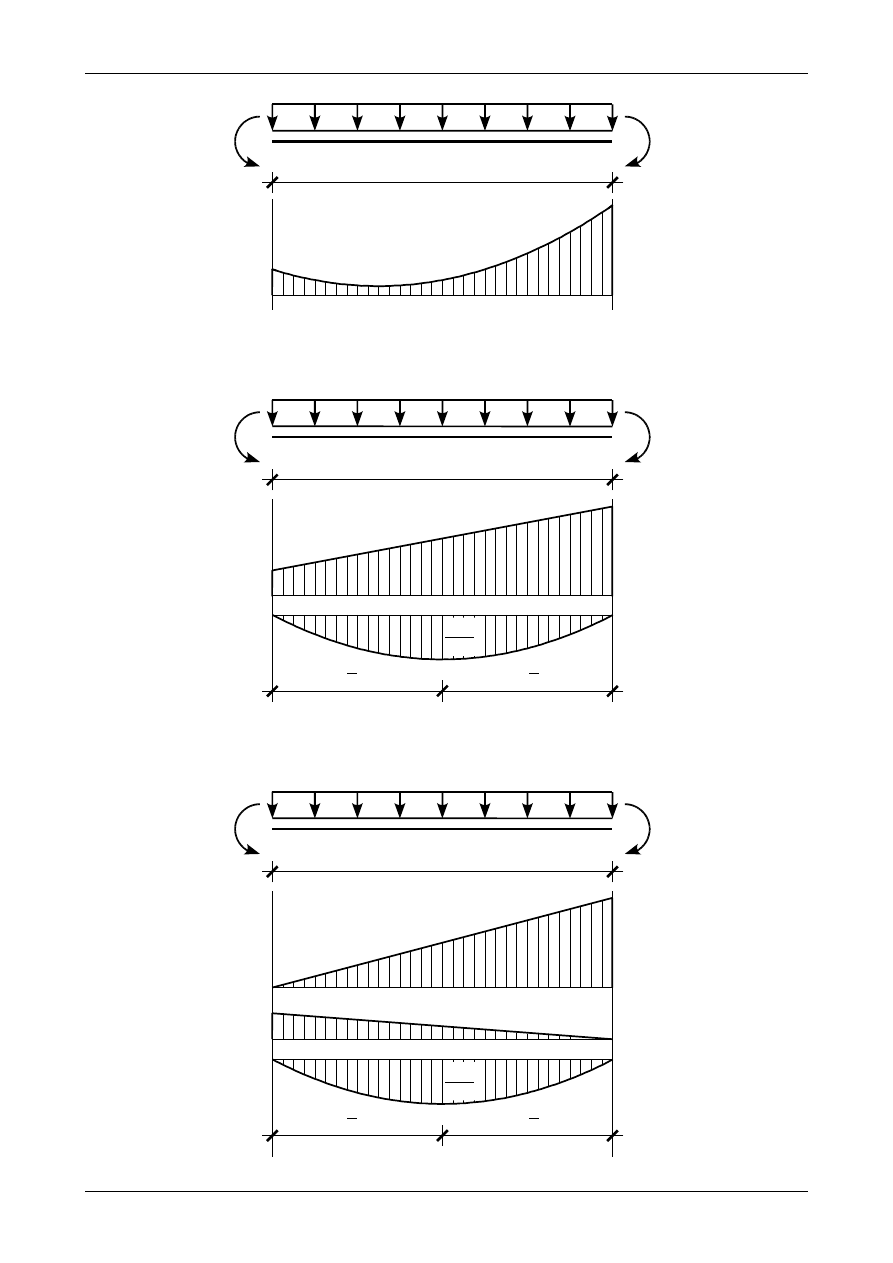
przedstawiony na rysunku 12.24. Rysunek 12.25 przedstawia wykres momentu zginającego w przedziale, w
którym także działa obciążenie ciągłe równomiernie rozłożone. Na końcach tego przedziału momenty
zginające wynoszą M
1
i M
2
. Oba rozciągają górną część belki. Łączymy te dwa punkty linią prostą i
dodajemy wykres momentu zginającego jak dla belki swobodnie popartej (rysunek 5.99). Otrzymamy
wykresy przedstawione na rysunku 12.26. Ostatnim etapem będzie przerobienie trapezowego wykresu
liniowego. W tym celu łączymy punkt M
1
na lewym końcu z zerem na prawym końcu, a punkt M
2
na
prawym końcu z zerem na lewym końcu. W wyniku tego otrzymamy ostatecznie przerobiony wykres
momentu zginającego przedstawiony na rysunku 12.27. Jeżeli obciążenie ciągłe równomiernie rozłożone
q w belce rzeczywistej działa w dół to parabola ma „brzuszek” skierowany w dół, jeżeli odciążenie to
działa do góry to parabola jest także skierowana do góry.
Dr inż. Janusz Dębiński
WM
12. PRZEMIESZCZENIA W BELKACH
16
q
L
M
1
M
2
M
1
M
2
Rys. 12.22. Wykres momentu zginającego w przedziale z obciążeniem ciągłym równomiernie rozłożonym
q
L
M
1
M
2
M
1
M
2
L
2
L
2
+
q⋅L
2
8
Rys. 12.23. Wykres liniowy i paraboliczny
q
L
M
1
M
2
M
1
M
2
L
2
L
2
+
+
0
0
q⋅L
2
8
Rys. 12.24. Ostatecznie przerobiony wykres momentu zginającego
Dr inż. Janusz Dębiński
WM
12. PRZEMIESZCZENIA W BELKACH
17
q
L
M
1
M
2
M
1
M
2
Rys. 12.25. Wykres momentu zginającego w przedziale z obciążeniem ciągłym równomiernie rozłożonym
q
L
M
1
M
2
M
1
M
2
L
2
L
2
+
q⋅L
2
8
Rys. 12.26. Wykres liniowy i paraboliczny
q
L
M
1
M
2
M
1
M
2
L
2
L
2
+
+
0
0
q⋅L
2
8
Rys. 12.27. Ostatecznie przerobiony wykres momentu zginającego
Dr inż. Janusz Dębiński
WM
12. PRZEMIESZCZENIA W BELKACH
18
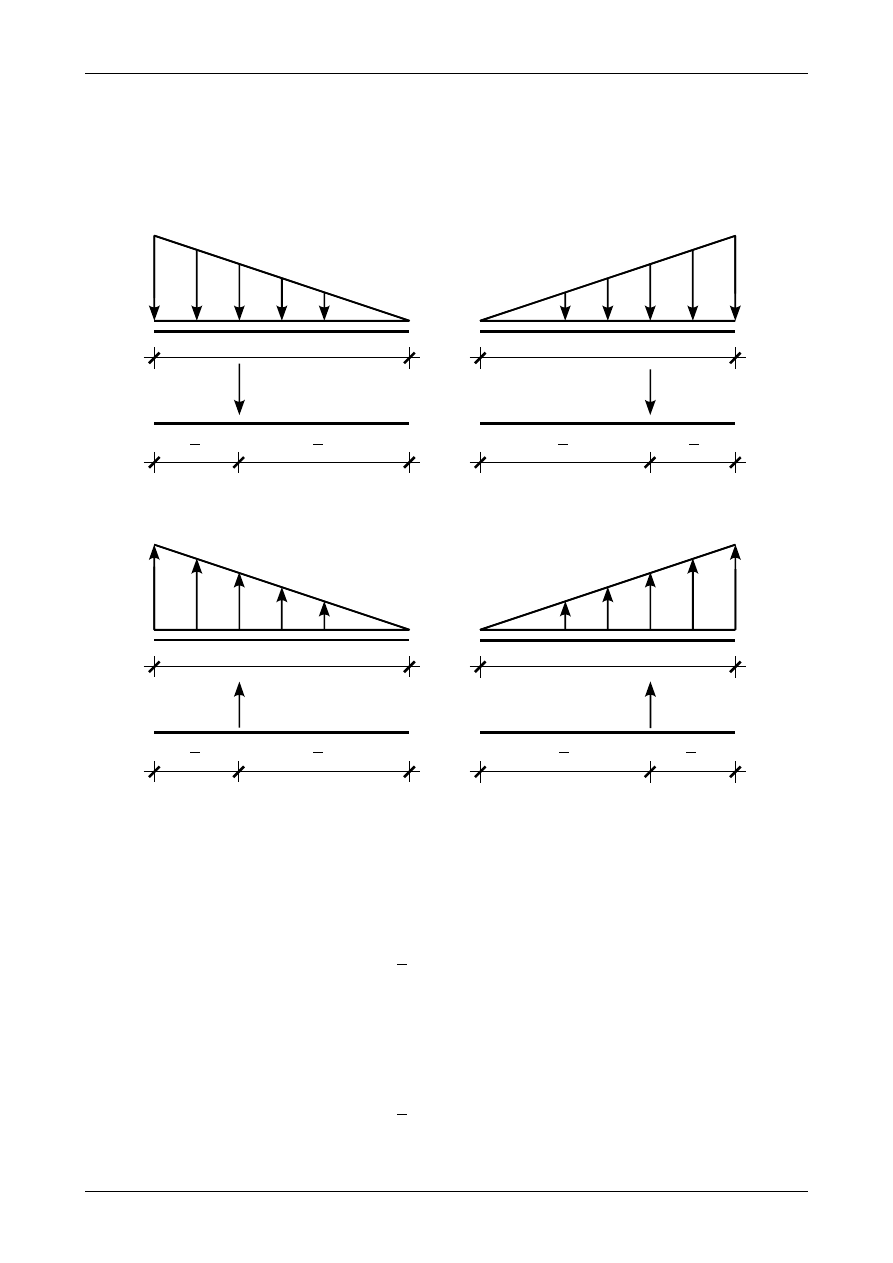
W wyniku przerobienia wykresu momentu zginającego otrzymamy wykres składający się z trójkątów
prostokątnych i parabol. Dzieląc odpowiedni rzędne wykresu przez sztywność na zginanie otrzymamy
wartości obciążenia wtórnego q
*
. Jego znak jest taki sam jak znak momentu zginającego. Wynika to ze
wzoru (12.48). Jeżeli moment zginający w belce rzeczywistej rozciąga dolną część belki to obciążenie
wtórne q
*
działa w dół, jeżeli moment ten rozciąga górną część belki to obciążenie wtórne działa do
góry.
L
0
L
0
L
3
2
3
⋅
L
L
3
2
3
⋅
L
q*
q*
W
*
W
*
Rys. 12.28. Siła wypadkowa z obciążenia trójkątnego w dół
L
0
L
0
L
3
2
3
⋅
L
L
3
2
3
⋅
L
q*
q*
W
*
W
*
Rys. 12.29. Siła wypadkowa z obciążenia trójkątnego do góry
Obciążenie wtórne jest obciążeniem ciągłym. Musimy wyznaczyć wartości i położenie wtórnych sił
wypadkowych z tego obciążenia. Wtórną siłę wypadkową W
*
z obciążenia trójkątnego wyznaczymy ze
wzoru
W
*
=
1
2
⋅
q
*
⋅
L
.
(12.51)
Położenie jej przedstawiają rysunki 12.28 i 12.29. Wtórną siłę wypadkową W
*
z obciążenia parabolicznego
wyznaczymy ze wzoru
W
*
=
2
3
⋅
q
*
⋅
L
.
(12.52)
Położenie jej przedstawia rysunek 12.30.
Dr inż. Janusz Dębiński
WM
12. PRZEMIESZCZENIA W BELKACH
19
L
L
L
2
L
2
L
2
L
2
q*
q*
W
*
W
*
Rys. 12.30. Siła wypadkowa z obciążenia parabolicznego
Mając wyznaczone wtórne siły wypadkowe z obciążenia wtórnego możemy wyznaczyć wtórne
reakcje oraz siły poprzeczne i momenty zginające w interesujących nas punktach belki fikcyjnej. Otrzy-
mamy w ten sposób kąty obrotu i ugięcia w belce rzeczywistej.
Dr inż. Janusz Dębiński
Document Outline
- 12.1. Wiadomości podstawowe
- 12.2. Równanie różniczkowe linii ugięcia
- 12.3. Wyznaczenie ugięć metodą bezpośredniego całkowania
- 12.4. Wyznaczanie ugięć metodą Clebscha
- 12.5. Wyznaczanie ugięć metodą obciążenia krzywiznami
Wyszukiwarka
Podobne podstrony:
projekty gry planszowe FD id 40 Nieznany
5 6 3 Lab Registry Backup id 40 Nieznany (2)
Projektowanie przekladnie id 40 Nieznany
Promethidion Opracowanie id 40 Nieznany
5 Schemat przylacza (Iza) id 40 Nieznany (2)
Promocja sprzedazy promos id 40 Nieznany
5 Laczenie gazociagow A B id 40 Nieznany (2)
Projektowanie filtrow FIR id 40 Nieznany
ProjektRys KKa Wrzesinski id 40 Nieznany
Przekladnia zebata gotowa id 40 Nieznany
PRZYCZYNY WAD ROZWOJOWYCH id 40 Nieznany
5 STATYSTYKA korelacja 1a id 40 Nieznany (2)
protokoly transformatorow id 40 Nieznany
przekroj (PROJEKT2) Model id 40 Nieznany
500 Bron masowego razenia id 40 Nieznany (2)
Przedstawiciel branzy oze id 40 Nieznany
5 Straty Sil Sprezajacych id 40 Nieznany (2)
Przerzutniki monostabilne id 40 Nieznany
więcej podobnych podstron