POLITECHNIKA WROCŁAWSKA
INSTYTUT INŻYNIERI BIOMEDCZNEJ I POMIAROWEJ
PL. GRUNWALDZKI 13, BUD. D1, POK. 026A
Laboratorium z Automatyki i robotyki
Typ dokumentu:
Sprawozdanie #2
Data
oddania sprawozdania:
18.11.2013r.
Tytuł:
Ćwiczenie 3,4,5.
REGULACJA TEMPERATURY
IDENTYFIKACJA OBIEKTU I
BADANIE JAKOŚCI REGULACJI
Autor:
Wstęp teoretyczny
Badanie zostało przeprowadzone przy użyciu mikrotermostatu elektronicznego (używanego
między innymi do przechowywania w stałej temperaturze materiałów biologicznych).
Jego temperaturę można nastawiać w przedziale od 22 °C do ok 70°C. Elementem
nagrzewającym się jest komora robocza z wbudowanym sterowanym elektronicznie
grzejnikiem - obiekt regulacji. Zadana temperatura jest zmieniana przez dołączony do wejścia
grzejnik napięcia sterującego którego wartość mieści się w przedziale od 1,15 [V] do 4,00 [V].
Zadaniem czujnika użytego do zmierzenia bieżącej temperatury było przetworzenie jej na
napięcie stałe. W doświadczeniu napięcie sterujące wynosiło 4,00 [V], a krok czasu dla którego
wykonane zostało doświadczenie wynosił 50ms.
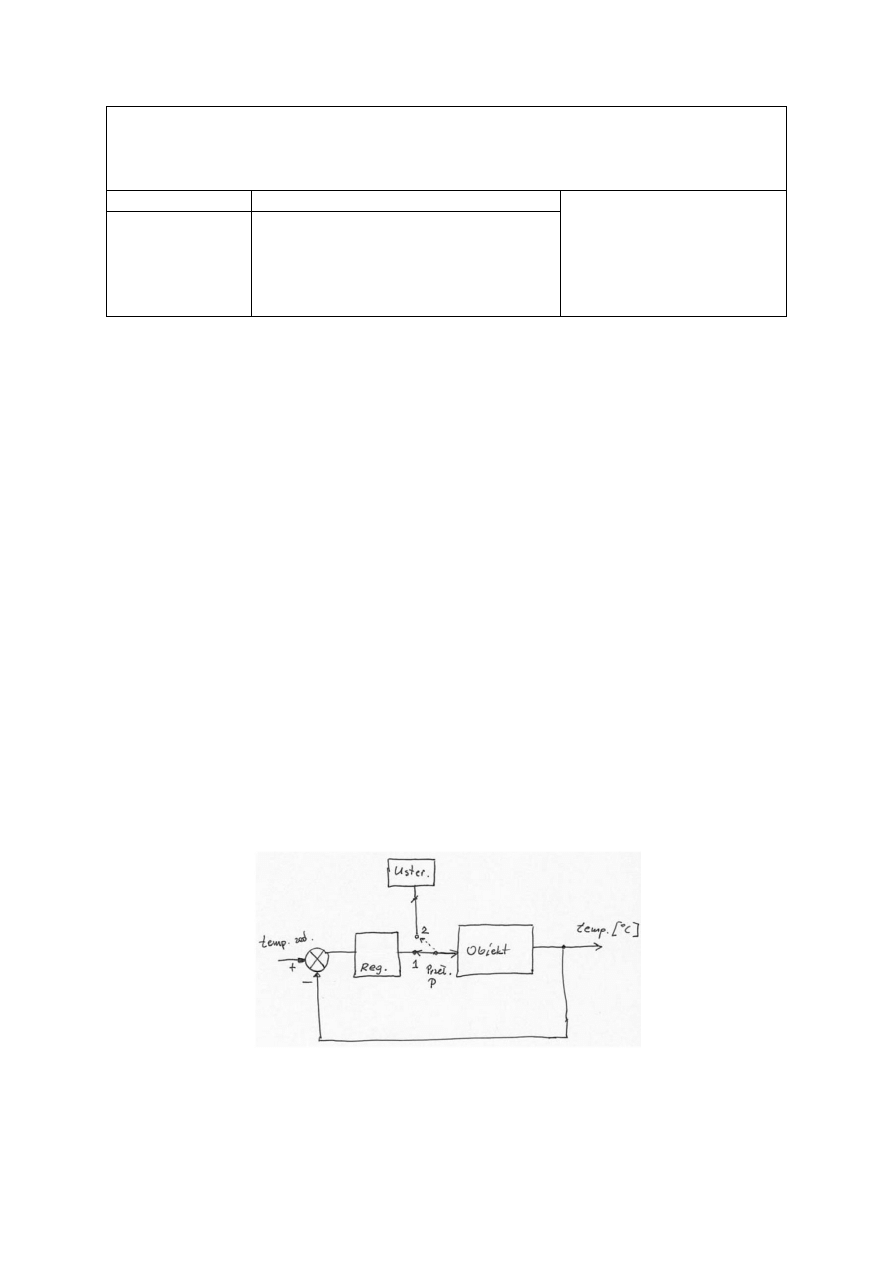
Schemat funkcjonowania układu regulacji mikrotermostatu przedstawiony na Rysunku 1
umożliwia pracę w dwóch układach. W chwili, gdy przełącznik P położony jest w pozycji 2
(układ otwarty) można wyznaczyć odpowiedź skokową obiektu. Jeśli przełącznik umieszczony
jest w pozycji 1 urządzenie pracuje w układzie zamkniętym z regulatorem dwustanowym lub
w układzie zamkniętym z regulatorem PID zależy to od uruchomionego programu
komputerowego. Otrzymane wyniki pomiarów należy zmienić odpowiednio na czas pomiaru
oraz temperaturę obiektu, mając na uwadze czułość czujnika temperatury oraz prędkość
próbkowania.
Rysunek 1 Schemat funkcjonalny układu regulacji mikrotermostatu.
I.
Część pierwsza - wyznaczenie odpowiedzi skokowej obiektu
1. Cel ćwiczenia:
Celem ćwiczenia było zbadanie wpływu czasu impulsu na przebieg charakterystyki
odpowiedzi skokowej badanego obiektu.
2. Przebieg badania:
Rozpoczęcie symulacji pracy mikrotermostatu zgodnie z wartościami podanymi
przez prowadzącego; napięcie sterujące U
ster
= 4 ,0 [V] i czasie trwania przebiegu
t=50ms.
Rozpoczęcie rejestracji działania przyrządu, odczytanie danych w arkuszu
kalkulacyjnym.
Wyznaczenie parametru T
pocz,
T
ust
, K
ob,
t
0
oraz τ.
Utworzenie w programie Simulink schematu blokowego umożliwiającego
zestawienie obiektu rzeczywistego i modelu.
3. Uzyskane wyniki i analiza danych
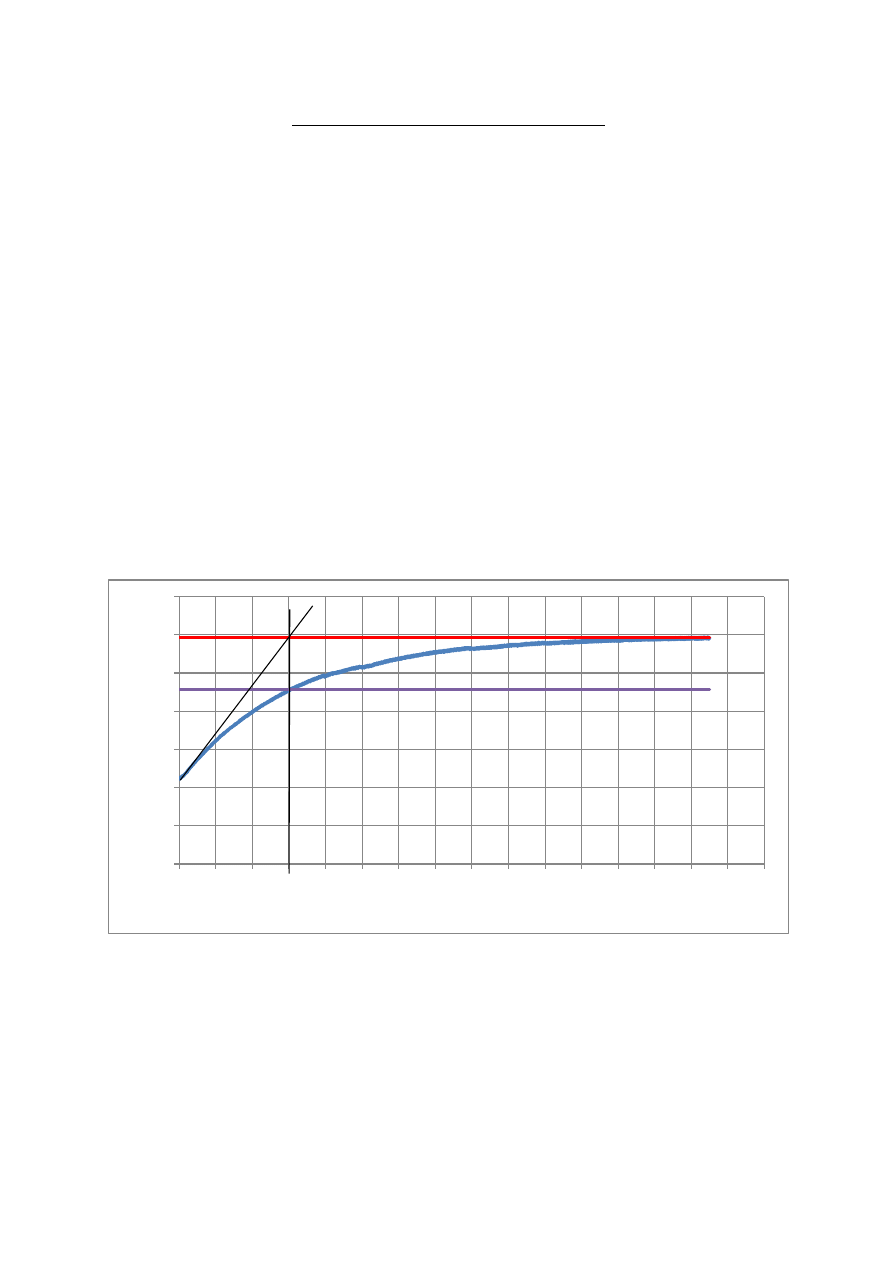
Odpowiedź skokowa badanego obiektu wraz z zaznaczonymi liniami pomocniczymi
niezbędnymi do wyznaczenia stałej czasowej.
Rysunek 2 Odpowiedź skokowa badanego obektu na rysunku oznaczona kolorem niebieskim, linia czerwona przedstawia
temperaturę maksymalną, linia fioletowa temperaturę równą 0,63ΔT+T
min
równą 45,65 [°C]. Linie czarne to linie
pomocnicze pniezbędne do wyznaczenia stałej czasowej.
Wyznaczenie parametrów:
Wartości odczytane z Rysunku 2 oraz zadane przez prowadzącego
temperatura minimalna - T
min
≈ 22,55 [°C]
temperatura maksymalna - T
max
≈ 59,3 [°C]
0
10
20
30
40
50
60
70
0
5
10
15
20
25
30
35
40
45
50
55
60
65
70
75
80
T [
°C]
t [min]
opóźnienie - t
0
= 0,2117 [min]
t
τ
= 15 [min]
napięcie strujące - U
ster
= 4,0 [V]
Obliczenia oraz użyte wzory
Stała czasowa - τ
𝜏 = 𝑡
𝜏
− 𝑡
0
𝜏 = 15 − 0,2117 ≈ 14,79 [𝑚𝑖𝑛] ≈ 𝟖𝟖𝟕, 𝟒 [𝒔]
Wzmocnie obiektu - K
ob
𝐾
𝑜𝑏
=
𝑇
𝑚𝑎𝑥
− 𝑇
𝑚𝑖𝑛
𝑈
𝑠𝑡𝑒𝑟
− 1,15
𝐾
𝑜𝑏
=
59,30 − 22,55
4,00 − 1,15
≈ 𝟏𝟐, 𝟖𝟗 [
℃
𝑽
]
Zestawienie otrzymanych wyników
Tabela 1 Zestawienie ptrzymanych wyników.
U
ster
T
max
T
min
t
0
τ
K
ob
[V]
[°C]
[°C]
[min]
[s]
[
℃
𝑽
]
4,0
59,3
22,55 0,2117 887,4
12,89
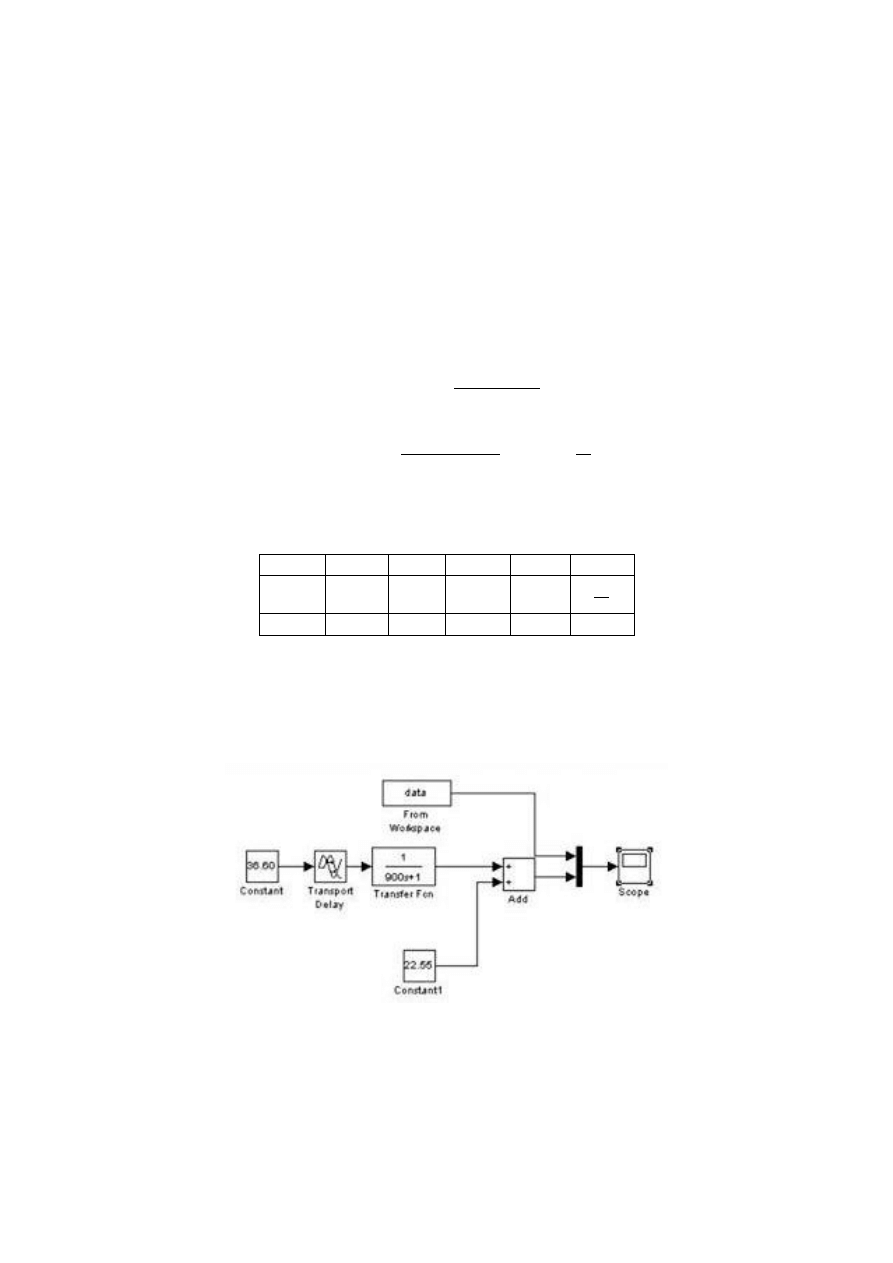
Symulacja badania przy użyciu bloków Simulink programu Matlab
Schemat blokowy modelu do badanie odpowiedzi skokowej
Rysunek 3 Schemat blokowy modelu.
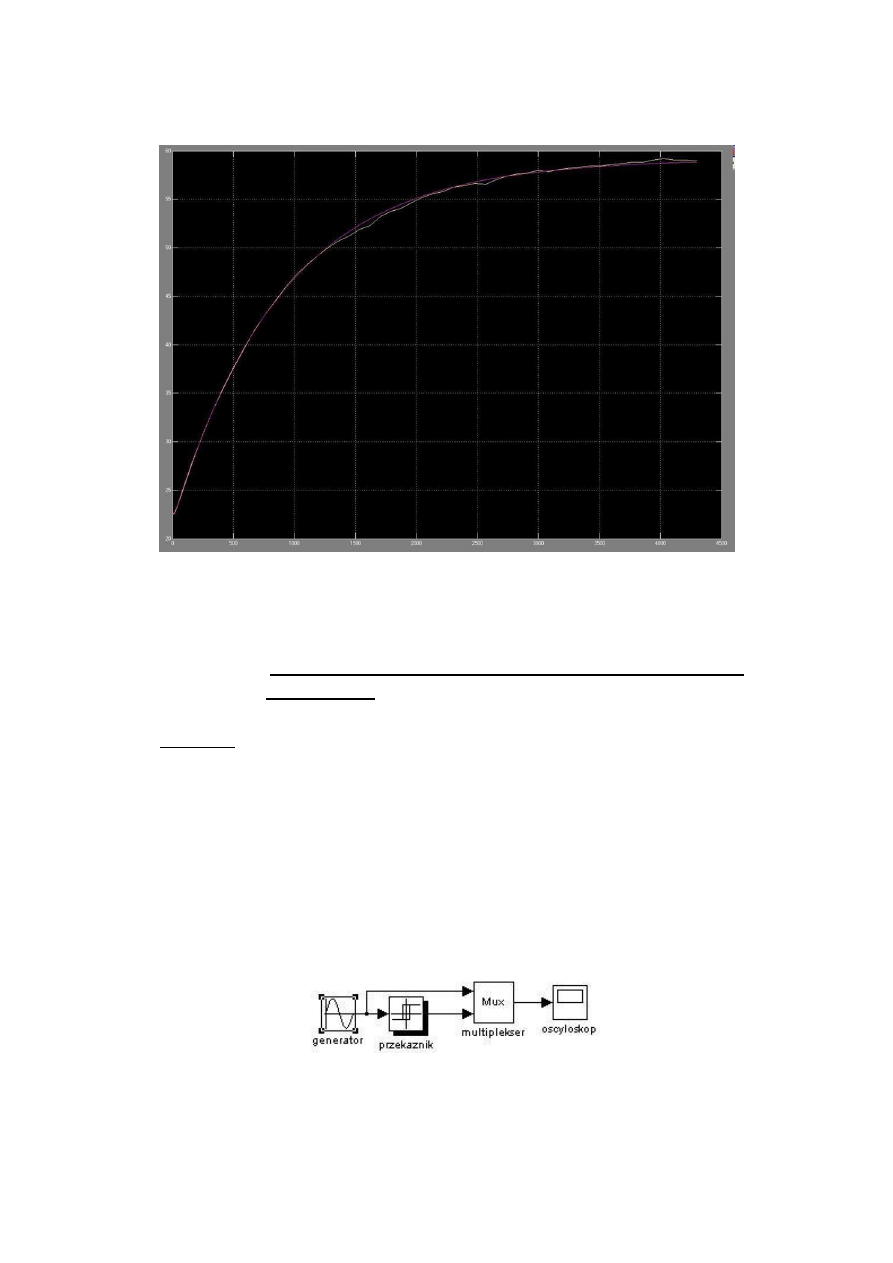
Otrzymana przy użyciu schematu blokowego charakterystyka
Rysunek 4 Zestawienie charakterystyk dla obiektu rzeczywistego (linia żółta) oraz dla modelu stworzonego przy użyciu
programu Matlab (linia fioletowa). Na osi odciętych widnieje czas [s], oś rzędnych przedstawia temperaturę [ °C]
II.
Część druga - Badanie mikrotermostatu w układzie zamkniętym z regulatorem
dwustanowym:
Zadanie I
1. Cel ćwiczenia
Zbadanie charakterystyki statycznej przekaźnika przy użyciu bloków Simulink
programu Matlab.
2. Otrzymane wyniki oraz analiza danych
Symulacja badania z wykorzystaniem bloków Simulink
Schemat blokowy modelu przekaźnika wykorzystany do badań
Rysunek 5 Schemat blokowy modelu przekaźnika.
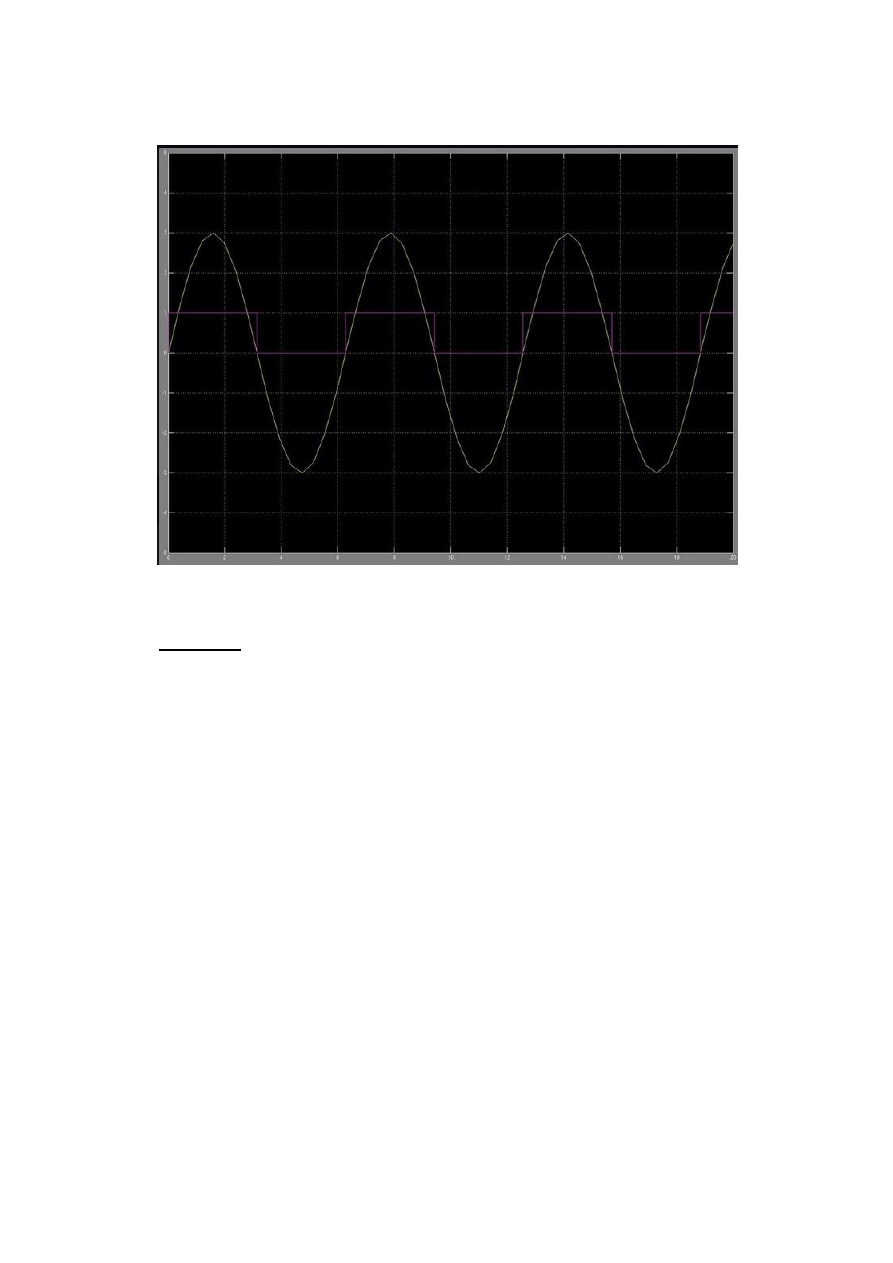
Program zarejestrował przebieg sygnału przedstawiony na Rysunku 6
Rysunek 6 Charakterystyka sygnału przekaźnika. Gdzie kolorem fioletowym przedstawiono sygnał wyjściowy, a kolorem
żółtym sygnał wejśćiowy, na osi odciętych widnieje czas [s], oś rzędnych przedstawia wartosć sygnału.
Zadanie II
1. Cel ćwiczenia
Zbadanie mikrotermostatu w układzie zamkniętym z regulatorem dwustanowym.
2. Przebieg badania
Wykonanie dwóch symulacji pracy mikrotermostatu zgodnie z wartościami
podanymi przez prowadzącego
graficzne przedstawienie otrzymanych wyników
wyznaczenie określonych wartości przy użyciu otrzymanej charakterystyki
3. Otrzymane wyniki oraz analiza danych
Na podstawie otrzymanych charakterystyk wysznaczono następujące
parametry:
czas, po którym sygnał wyjściowy z obiektu osiąga po raz pierwszy wartość
zadaną - t
zad
wartość przeregulowań (maksymalnych odchyłek od wartości zadanej) na
wyjściu obiektu - w
p
czas pierwszego załączenia przekaźnika - t
zał
stosunek kolejnych czasów załączeń i wyłączeń - S
pr
czas trwania cyklu załączenie wyłączenie - t
cykl
wartość średnia sygnału wyjściowego z obiektu (z pominięciem pierwszego
przeregulowania) - w
śr
Badanie układu rzeczywistego dla podanych przez prowadzącego
parametrów
Badanie I
temperatura mikrotermostatu - T
ust
=35 [°C]
histereza - h=0,6
czas próbkowania - t=200 [ms]
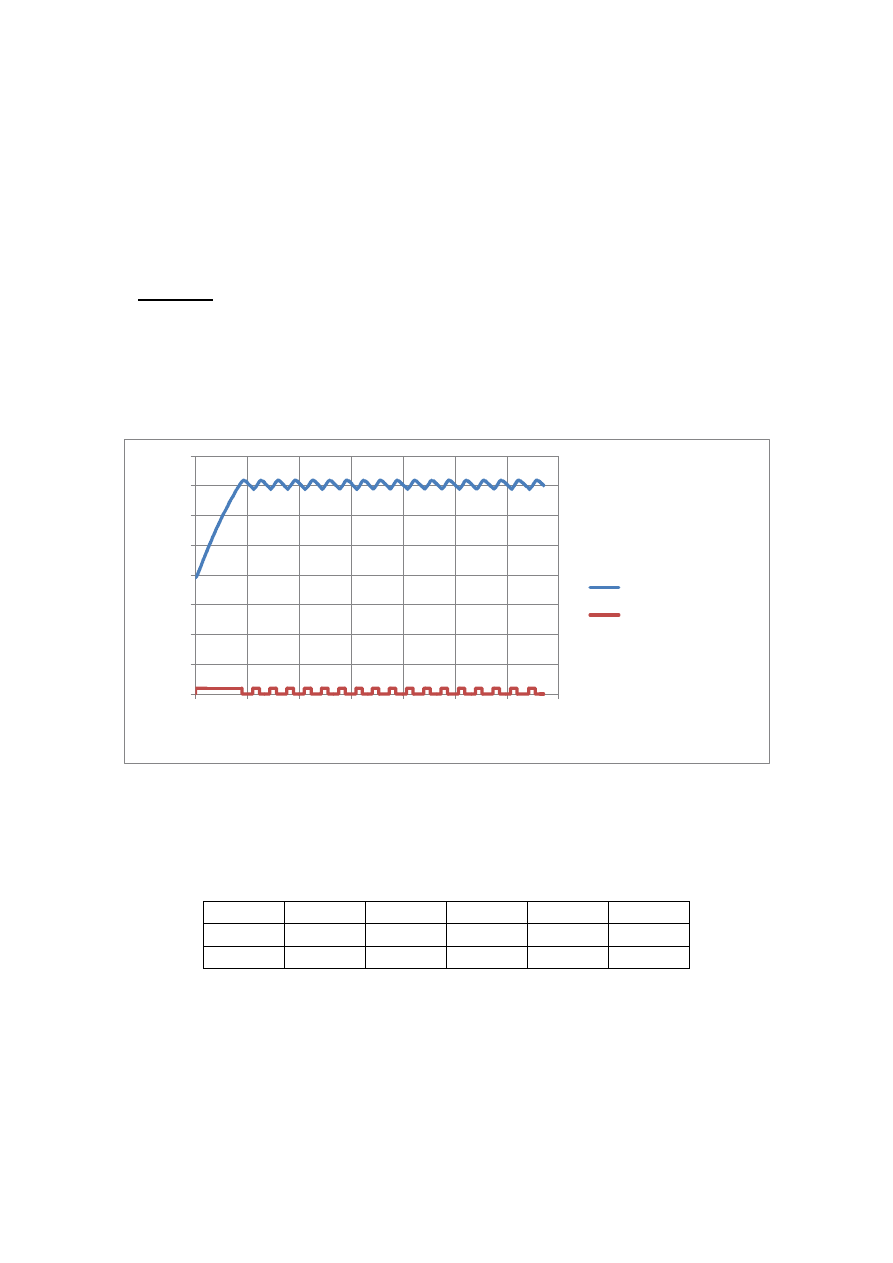
Charakterystyka sygnału wyjściowego z mikrotermostatu
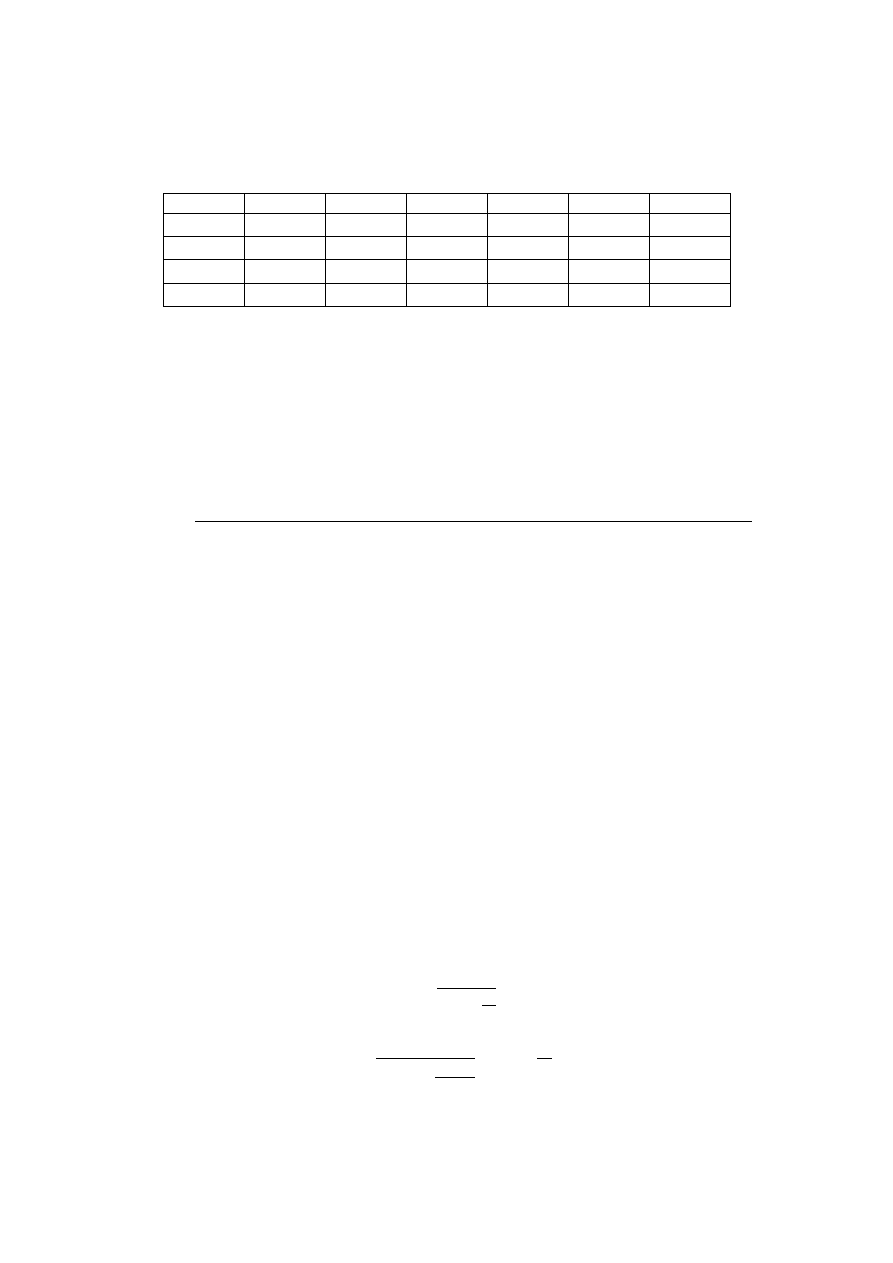
Rysunek 7 Charakterystyka sygnału na wyjściu mikrotermostatu przy regulacji dwupołożeniowej dla temperatury
mikrotermostatu równej 35 °C
Wartości odczytane z Rysunku 3
Tabela 2 Zestawienie wyznaczonych parametrów, odczytanych z Rysunku 3
t
zad
w
p
t
zał
S
pr
t
cykl
w
śr
[min]
[°C]
[min]
[-]
[min]
[°C]
8,45
0,97
14,32
0,63
3,28
35,24
0
5
10
15
20
25
30
35
40
0
10
20
30
40
50
60
70
T [
°C]
t [min]
Temperatura czujnika
Przekaźnik
Badanie II
temperatura mikrotermostatu - T
ust
=50 [°C]
histereza - h=0,3
czas próbkowania - t=200 [ms]
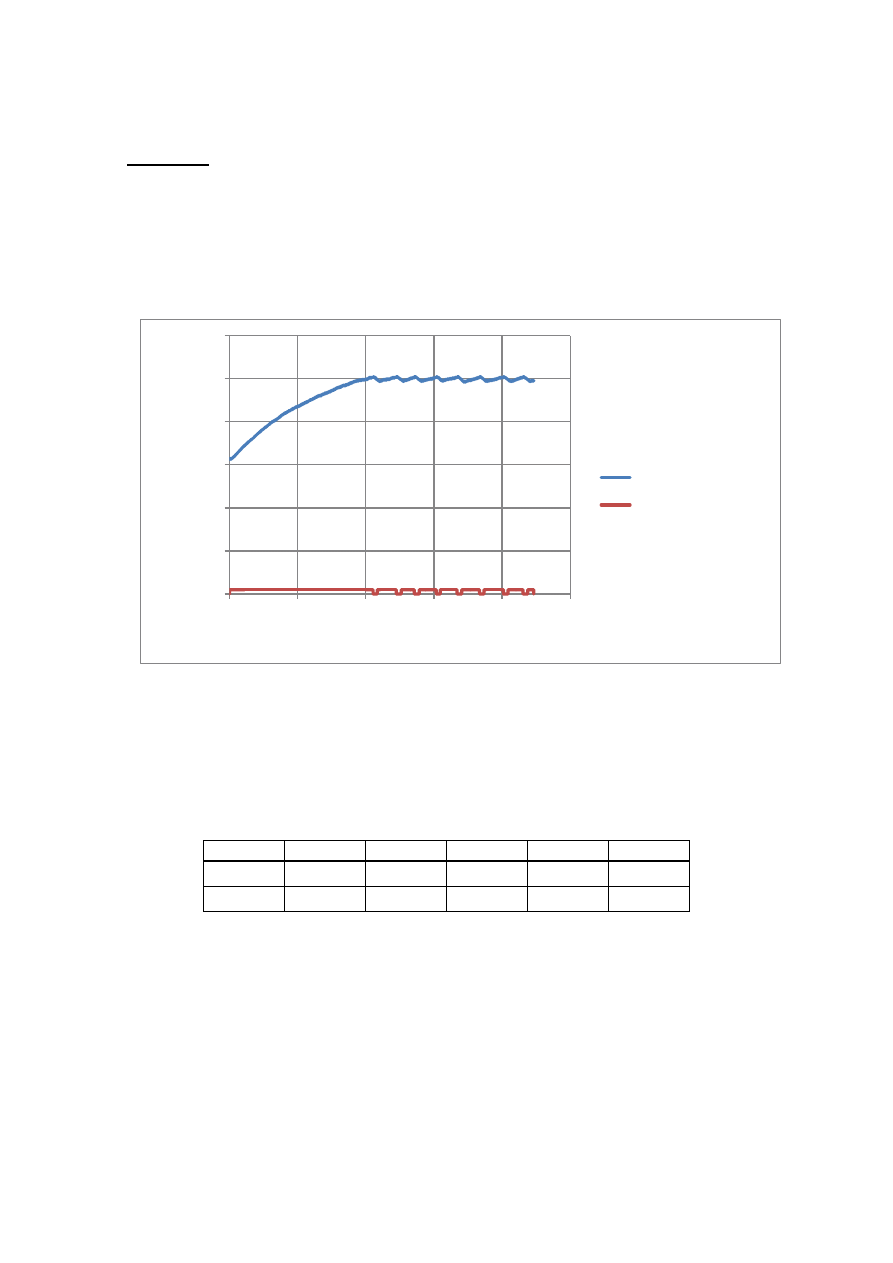
Charakterystyka sygnału wyjściowego z mikrotermostatu
Rysunek 8 Charakterystyka sygnału na wyjściu mikrotermostatu przy regulacji dwupołożeniowej dla temperatury
mikrotermostatu równej 50 °C
Wartości odczytane z Rysunku 4
Tabela 3 Zestawienie wyznaczonych parametrów, odczytanych z Rysunku 4
t
zad
w
p
t
zał
S
pr
t
cykl
w
śr
[min]
[°C]
[min]
[-]
[min]
[°C]
20,29
0,47
21,68
3,48
3,52
49,96
0
10
20
30
40
50
60
0
10
20
30
40
50
T [
°C]
t [min]
Temperatura czujnika
Przekaźnik
Symulacja badania przy użyciu bloków Simulink programu Matlab
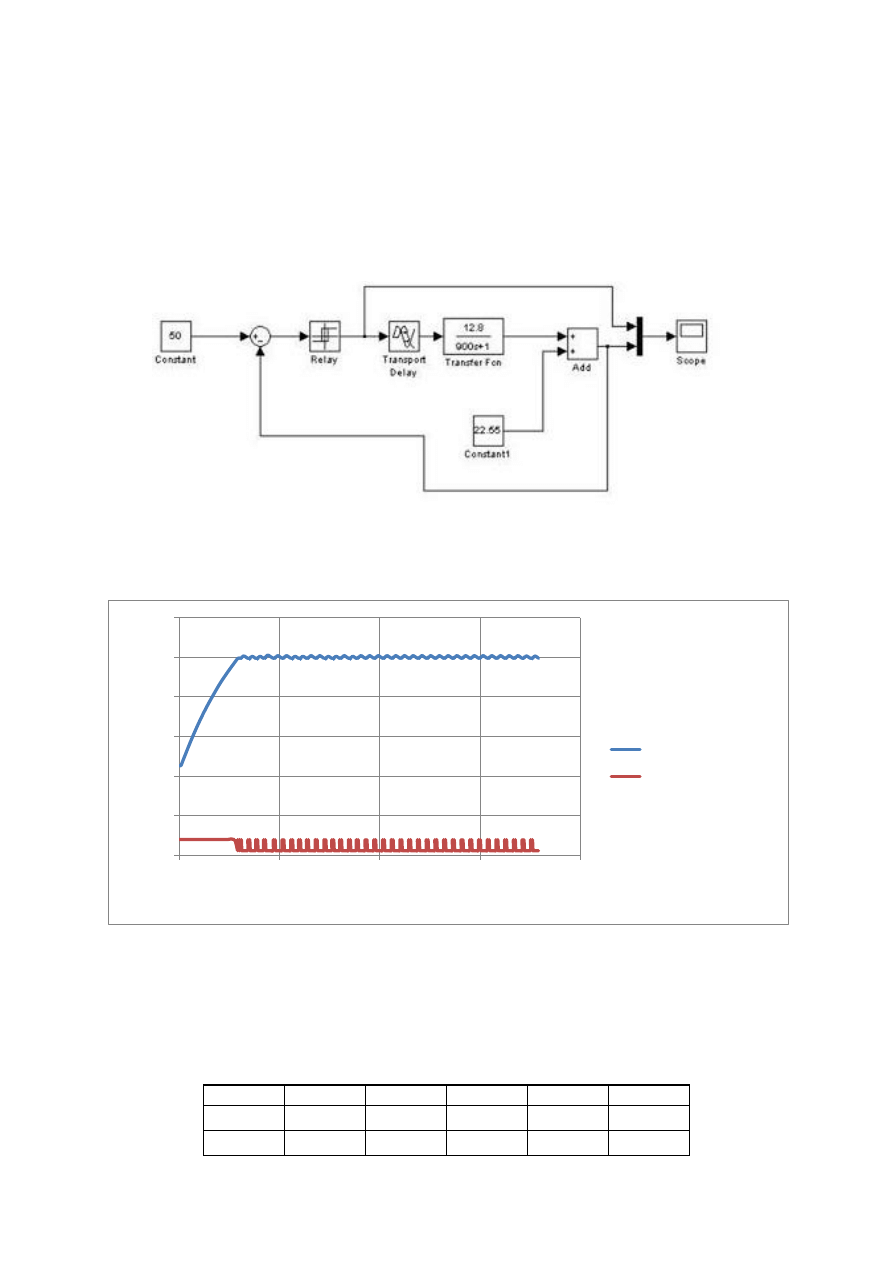
Schemat blokowy modelu do badanie regulacji dwupołożeniowej dla zadanej
temperatury równej 50°C oraz histerezy 0,3; parametry w poszczególnych blokach
zostały ustawione zgodnie z parametrami otrzymanymi w części pierwszej:
Rysunek 9 Schemat blokowy układu do regulacji dwupołożeniowej.
Otrzymana przy użyciu schematu charakterystyka dla T
ust
= 50°C oraz histerezy 0,3
Rysunek 10 Wpływ sygnału z przekaźnika na sygnał wyjściowy obiektu otrzymany dzięki symulacji w programie Matlab.
Wartości odczytane z Rysunku 10
Tabela 4 Zestawienie wszystkich parametrów odczytanych z Rysunku 6.
t
zad
w
p
t
zał
S
pr
t
cykl
w
śr
[min]
[°C]
[min]
[-]
[min]
[°C]
12,5
0,5
11,67
0,08
1,32
49,92
0
10
20
30
40
50
60
0
20
40
60
80
T [
°C]
t [min]
Temperatura obiektu
Przekaźnik
Zestawienie parametrów dla zmiennej histerezy
Tabela 5 Zestawienie wszystkich parametrów dla zmiennej histerezy, uzyskanych przy użyciu schematu blokowego z
części II.
histereza
t
zad
w
p
t
zał
S
pr
t
cykl
w
śr
[-]
[min]
[°C]
[min]
[-]
[min]
[°C]
0,2
12,56
0,5
12,09
0,27
1,32
49,92
0,3
12,5
0,5
11,67
0,26
1,32
49,92
0,6
14,37
0,1
11,48
0,25
1,58
49,62
Odtworzenie pracy elementu rzeczywostego dla nastawów podanych przez
prowadzącego temperatura T
ust
=35 [°C] oraz histereza h=0,6 za pomocą bloków
Simulinka
w
programie
Matlab
było
niemożliwe.
Część III - Badanie mikrotermostatu w układzie zamkniętym z regulatorem ciągłym PID
1. Cel ćwiczenia
Celem ćwiczenia było badanie mikrotermostatu w układzie zamkniętym z
regulatorem ciągłym PID
2. Przebieg badania
Uruchomienie wirtualnego przyrządu rejestrującego pracę mikrotermostatu
Dobór modelu przybliżonego (człon opóźniający + człon inercyjny I-go rzędu)
dla obiektu inercyjnego wyższego rzędu.
Wykonanie w Simulinku symulacji pracy obiektu z regulacją ciągłą PID
3. Otrzymane wyniki i analiza danych
Badanie układu rzeczywistego w układzie zamkniętym z regulatorem ciągłym
PID
Dobór nastaw regulatorów ciągłych dla obiektu statycznego o parametrach
wyznaczonych w części pierwszej, dla przeregulowania ≈ 20%
wzmocnienie - K
p
𝐾
𝑝
=
1,2
𝐾
𝑜𝑏
−
𝑡
0
𝜏
𝐾
𝑝
=
1,2
12,89 −
0,21
14,79
= 0,09 [
𝑉
℃
]
czas całkowania - T
i
𝑇
𝑖
= 2,0 · 𝑇
0
𝑇
𝑖
= 2,0 ·
0,21 = 0,42 [𝑚𝑖𝑛]
czas różniczkowania T
d
𝑇
𝑑
= 0,4 · 𝑇
0
𝑇
𝑑
= 0,4 ·
0,21 = 0,084 [𝑚𝑖𝑛]
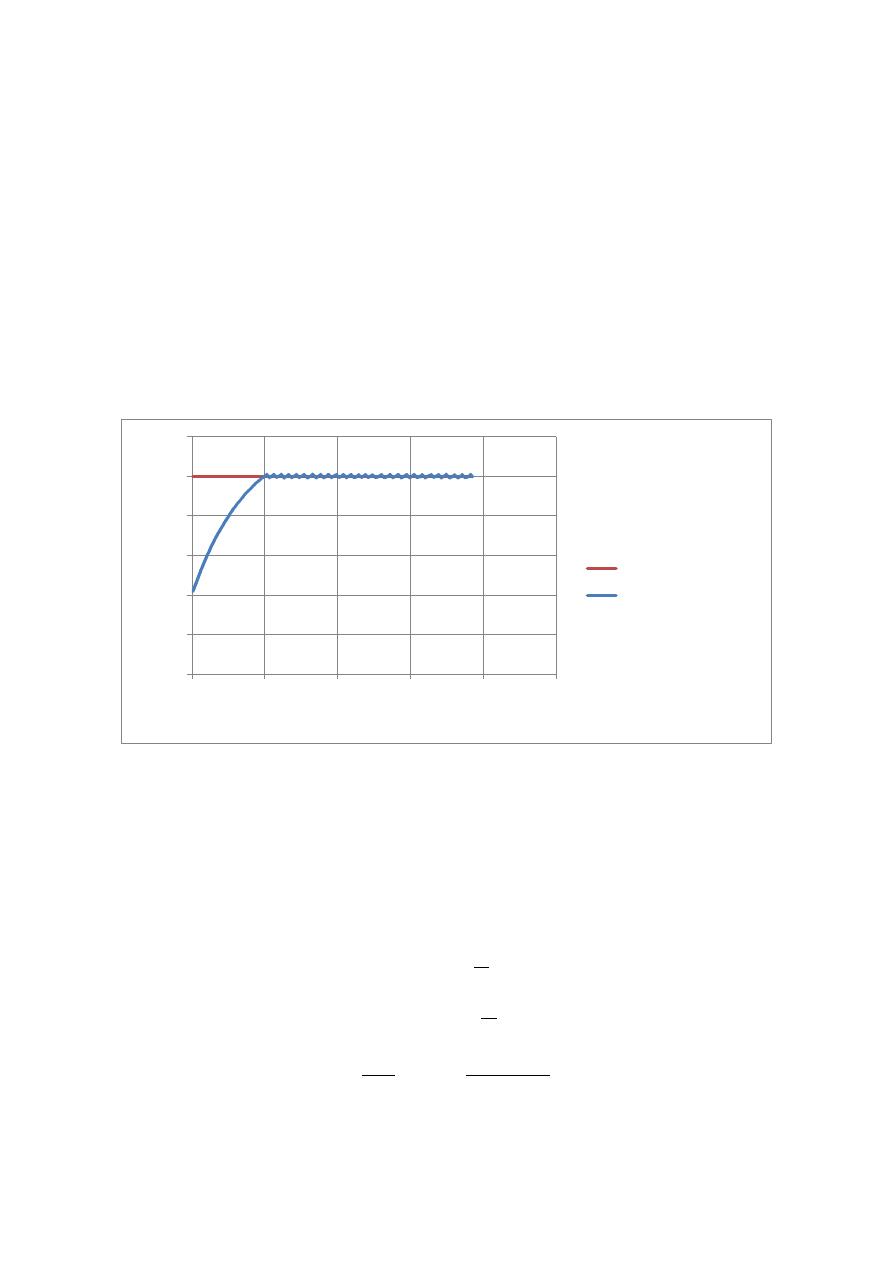
Charakterystyka sygnału wyjściowego z mikrotermostatu z regulatorem ciągłym PID
Rysunek 11 Charakterystyka sygnału na wyjściu mikrotermostatu przy regulacji ciągłej PID.
Symulacja badania przy użyciu bloków Simulink programu Matlab
Obliczenie nastaw regulatora PID w pakiecie Simulink
𝑃 = 𝐾
𝑝
𝑃 =
0,09
[
𝑉
℃
]
𝐼 =
𝐾
𝑝
𝑇
𝑖
𝐼 =
0,09
0,42
= 0,21 [
𝑉
℃ ∗ (min )
]
0
10
20
30
40
50
60
0
2
4
6
8
10
T [
°C]
t [min]
"Zadana temperatura"
Temperatura czujnika
𝐷 = 𝑇
𝑑
· 𝐾
𝑝
𝐷 = 0,084 · 0,09 = 0,008 [
𝑉 ∗ 𝑚𝑖𝑛
℃
]
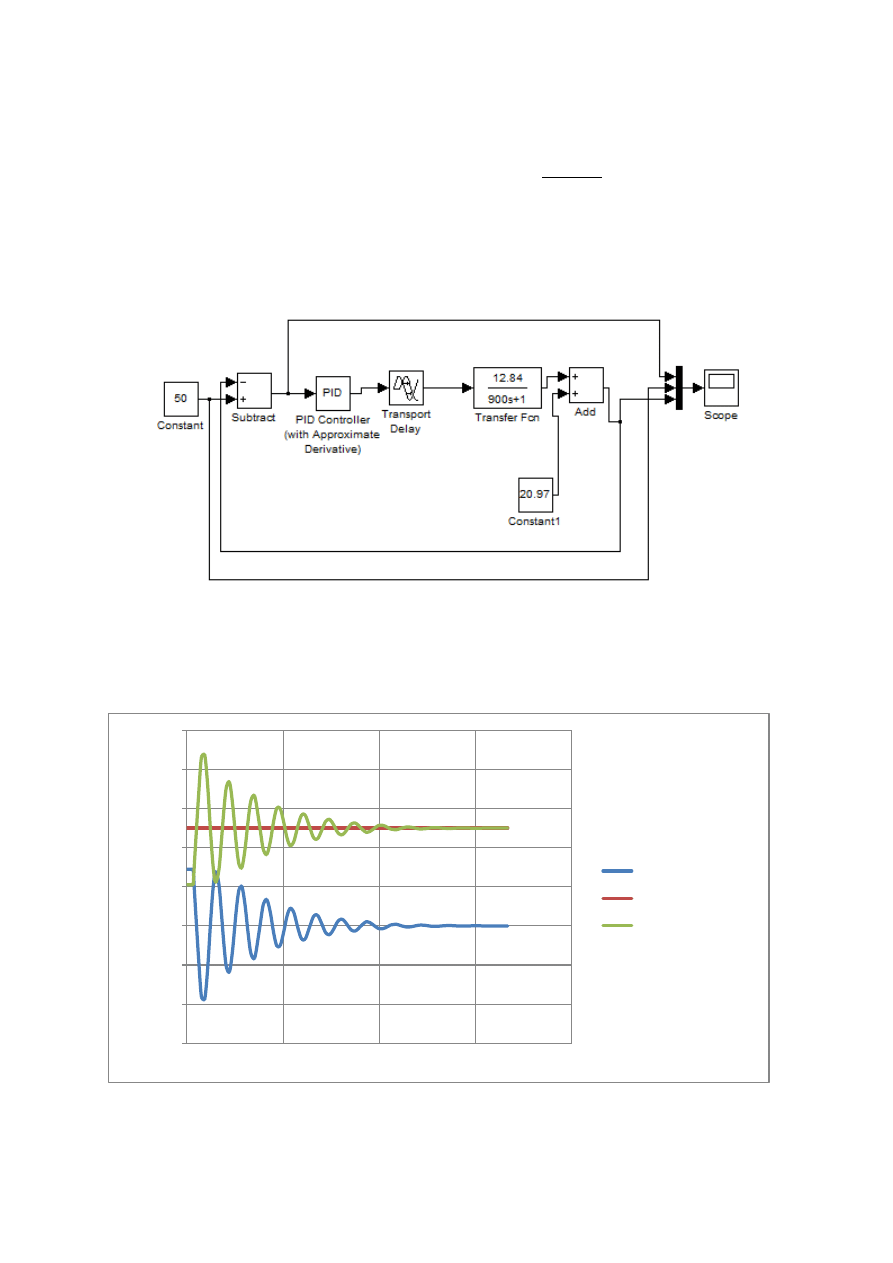
Schemat blokowy modelu do badanie regulacji ciągłej PID parametry w
poszczególnych blokach zostały ustawione zgodnie z wartościami otrzymanymi w
części pierwszej oraz z części trzeciej:
Rysunek 12 Schemat blokowy układu do regulacji ciągłej PID.
Otrzymana przy użyciu schematu charakterystyka dla regulacji ciągłej PID
Rysunek 13 Charakterystyka odpowiedzi modelu obiektu przy regulacji ciągłej PID otrzymanej przy użyciu programu
Matlab.
-60
-40
-20
0
20
40
60
80
100
0
5
10
15
20
T [
°C]
t [min]
Odchyłka regulacji
Wartość zadana
Odpowiedź obiektu
Wartości odczytane z Rysunku 13
czas regulacji - t
r
= 108 [s]
maksymalny uchyb regulcji ε
ust
= 37,7 [°C]
przeregulowanie Ƙ = 75,4 [%]
IV.
WNIOSKI
Analizując część pierwszą sprawozdania można powiedzieć, iż odpowiedź obiektu była
prawidłowa. Otrzymano odpowiedź skokową z niewielkim opóźnieniem, które wynika
z czasu niezbędnego do przetworzenia zadanego sygnału, świadczy to o tym, że
mikrotermostat jest członem dynamicznym. Można zatem powiedzieć,
że charakterystyka grzania została wykonana poprawnie, a mkrotermostat jest
członeminercjalnym wyższego rzędu.
Przy użyciu bloków Simulinka z programu Matlab do symulacji zachowania obiektu
rzeczywistego powstał wykres zależności temperatury od czasu przedstawiony na
Rysunku 4. Charakterystyki dla obiektu rzeczywistego oraz dla modelu pokrywają się
co świadczy o prawidłowym doborze parametrów, gdyż obiekt rzeczywisty jest
odzwierciedlany poprawnie przez model.
Z symulacji w Simulinku zawartej w częście drugiej, zadanie pierwsze, która pozwalała
na obserwację stanu przekaźnika, można powiedzieć, iż na zachowanie przekaźnika nie
wpływa amplituda sygnału wejściowego, lecz częstotliwość tego sygnału. Na Rysunku
6 widzimy efekt symulacji w której nie ma histerezy, a na wejściu wartość przyjmuje
zero lub jeden w takiej sytuacji stan przekaźnika zmienia się co wartość Π.
Zadanie drugie przeprowadzone w części drugiej przedstawia charakterystykę dla
badanego mikrotermostatu. Rysunek 7 oraz Rysunek 8 przedstawiają standardowy efekt
działania regulacji dwupołożeniowej bez zakłóceń dla dwóch różnych zadanych
temperatur. W chwili osiągnięcia przez układ temperatury zadanej na wyjściu, moc
przestaje być dostarczana do układu, a przekaźnik zostaje wyłączony. W momencie
w którym temperatura na wyjściu obniża się poniżej określonej wartości, przekaźnik
ponownie uruchamia się, wszystkie te działania odbywają się z niewielkim
opóźnieniem. Czas pierwszego załączenia przekaźnika jest dłuższy niż w kolejnych
wychyleniach, wpływa na to fakt, że początkowa temperatura mikrotermostatu jest
znacznie niższa od zadanej, potrzebuje on więc więcej czasu na osiągnięcie jej niż
w kolejnych przypadkach, gdy temperatura na wyjściu jest zbliżona do tej określonej.
Sygnał wyjściowy obiektu rzeczywistego nie ma wartości stałej, posiada odchylenia od
wartości zadanej o określonym okresie oraz amplitudzie. Simulink umożliwia
zamodelowanie dowolnej charakterystyki, zmiana interesujących nas parametrów
pozwala na obserwację ich wpływu na przebieg wybranych zależności. Rysunek 10
przedstawia charakterystykę sygnału wyjściowego dla regulacji dwupołożeniowej
modelu z zadaną temperaturą równą 50 °C. Jest ona zbliżona do rzeczywistej
charakterystyki sygnału. Porównując otrzymane parametry dla przekaźnika z różną
wartością histerezy można powiedzieć, iż wartość histerezy wpływa na częstotliwość
załączeń przekaźnika. Im niższą wartość ma histereza tym większa jest częstotliwość
załączania się przekaźnika - krótszy czas trwania cyklu, dzięki temu wzrasta dokładność
utrzymywanej temperatury w stosunku do temperatury zadanej. Model stworzony w
programie Matlab do symulacji regulacji dwupołożeniowej nie spełniał warunków
określonych w części drugiej, badanie pierwsze gdzie temperatura zadana wynosiła 35
°C, a histereza wynosiła 0,6. Wprowadzenie tych nastaw do Simulinka dało błędną
charakterystykę.
Analizując wyniki otrzymane w częsci trzeciej dla regulacji ciągłej PID można
powiedzieć, że charakterystyka obiektu rzeczywistego (Rysunek 11) oraz
charakterystyka modelu otrzymanego przy użyciu programu Matlab (Rysunek 13)
znacznie różnią się od siebie. Charakterystyka otrzymana na Rysunku 11 bardziej
przypomina tą dla regulacji dwupołożeniowej (Rysunek 7, 8) może to świadczyć o tym,
że dla parametrów obiektu obliczonych w części pierwszej sprawozdania prawidłowa
jest regulacjia dwupołożeniowa świadczy o tym również praktyczne kryteriu doboru
rodzaju regulacji do obiektu scharakteryzowanego czasem opóźnienia t
0
i stałą czasową
τ zakładają że stosuje się:
• regulacją dwupołożeniową jeśli
𝑡
𝑜
𝜏
< 0.2
• regulację ciągłą jeśli 0 ≤
𝑡
𝑜
𝜏
≤ 1
• regulację krokowo- impulsową jeśli 1 <
𝑡
𝑜
𝜏
W naszym przypadku t
0
=12,6s, a τ=887,4s, nasze
𝑇
𝑜
𝜏
= 0,014, czyli ponownie można
stwierdzić że najodpowiedniejsza jest regulacja dwupołożeniowa.
Analizując wykres na Rysunku 13 można powiedzieć,iż regulator PID dla
przeregulowania 20% mimo dużych zakłóceń i odchyleń powrócił do zadanej wartości
temperatury, świadczy to o poprawnym działaniu członów proporcjonalnym,
całkującym oraz różniczkującym, które utrzymują sygnał na zadanym poziomie.
.
Wyszukiwarka
Podobne podstrony:
SR 8 Adaptive Air Conditioning ULA[1]
DIELEKTRYKI cz1 AIR
Popular Mechanics Finding And Fixing Water And Air Leaks
Dawning Star Terraformer 10 Eotian Air Carriers
Prog wyk TMM AiR 2010
Poprawkowy AiR 2008 2009
egzamin air 08092010 studenci
programowanie020, AiR, semestr II
Koła 2010, pwr, air, semestr 3, Mechanika analityczna, KOŁO ĆWICZENIA (matek sp)
tab imip a4, AiR WIP, IV semestr, PRZTS Przetwórstwo tworzyw sztucznych, projekt
1 AiR
Air Com Tabela przelicznikowa
egz kon ETI AiR 2010 11
kol kon sem2 AiR 2010
Kol 1 popr1 z ETMiMD AiR wiecz inz sem5 2010 11
Instrukcja montażu Air Top 3500 ST
AiR metr 5
automatyka i robotyka-rozwiazania, Politechnika Wrocławska - Materiały, podstawy automatyki i roboty
więcej podobnych podstron