
Napędy z silnikiem prądu stałego: obcowzbudnym i z magnesami
trwałymi.
Warszawa marzec 2008

1.
Symbole występujące w tekście
Litery duże oznaczają wielkości stałe (wartości średnie, skuteczne, amplitudy, parametry
elementów itp.), literami małymi oznaczono wielkości zmienne, przeważnie zależne od
czasu. Symbole wypisane są w kolejności występowania w tekscie.
•
R
a
[om] – rezystancja uzwojenia wirnika,
•
L
a
[H] – indukcyjność uzwojenia wirnika,
•
U
a
, u
a
[V] – napięcie zasilające,
•
I
a
, i
a
[A] prąd twornika,
•
E, e [V] – napięcie wewnętrzne (siła elektromotoryczna),
•
M
e
, m
e
e
[Nm] - moment obrotowy wytworzony w silniku,
•
M
b
[Nm] – moment obciążenia wału silnika,
•
Ψ [Vs] – strumień wzbudzenia,
•
ke [Vs], [V min / obr] – stała napięciowa, strumień skojarzony z wirnikiem
•
km [Vs] – stała momentowa strumień, skojarzony z wirnikiem,
•
Ω, ω [rad/s] – prędkość kątowa wirnika,
•
n [obr/min] – prędkość obrotowa wirnika,
•
MR – maszyna robocza,
•
nbj – prędkość biegu jałowego,
•
P [W] – moc,
•
I, II, III, IV – numery ćwiartek układu współrzędnych M, n
2.
Silniki prądu stałego: obcowzbudny i z magnesami trwałymmi – wiadomości
podstawowe
2.1.
Schemat zastępczy
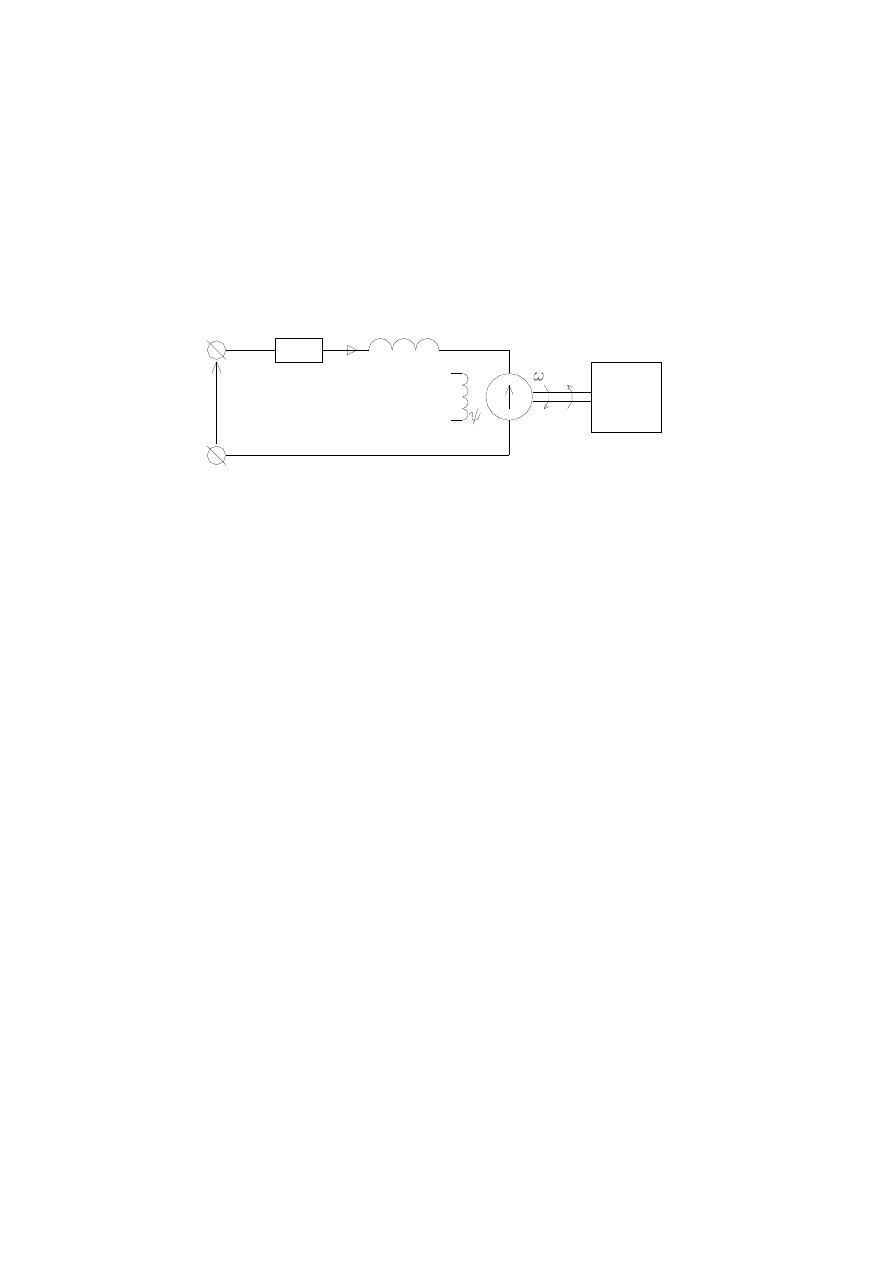
Schemat zastępczy układu napędowego z silnikiem prądu stałego pokazano na rys. 1.
Rys. 1. Schemat zastępczy układu napędowego z silnikiem prądu stałego;
Na podstawie tego schematu można napisać równania opisujące funkcje silnika w tym
układzie. Równania napięciowe obwodu stojana:
u
a
= R
a
i
a
+ L
a
di /dt + e
(1.1)
e = ke
ω
(1.2)
równania ruchu
m
e
= M
b
+ J d
ω
/dt
(1.3)
m
e
= km i
a
(1.4)
2.2.
Właściwości silnika w stanie ustalonym
Równania (1.1 – 1.4) w stanie ustalonym przyjmują postać:
U
a
= R
a
I
a
+ E
(1.5)
E = ke
Ω
(1.6)
M
e
= km I
a
(1.7)
Po wstawieniu wyrażenia (1.6) do (1.5) można wyznaczyć zależność prędkości kątową
wirnika od innych wielkości występujących w tych wyrażeniach
Ω
= (U
a
- R
a
I
a
) / ke = U
a
/ ke - (R
a
I
a
) / ke =
Ω
bj
- ∆
Ω
(1.8)
Ua
Ra
La
Me
E
MR
Mb
analogicznie dla prędkość obrotowa
n = (U
a
- R
a
I
a
) / ke = U
a
/ ke - (R
a
I
a
) / ke = n
bj
-
∆
n
(1.8a)
Ułamek pierwszy w równaniach (1.8) i (1.8a) oznacza prędkość silnika bez obciążenia –
prędkość idealnego biegu jałowego
Ω
bj
= U
a
/ ke
n
bj
= U
a
/ ke
(1.9)
a ułamek drugi zmniejszenie prędkości silnika wywołane momentem obciążenia.
∆
Ω
= (R
a
I
a
) / ke
∆n = (R
a
I
a
) / ke
(1.10)
Do pokonania tego momentu potrzebny jest przepływ prądu w tworniku silnika, który na
rezystancji wywołuje spadek napięcia i ogranicza wartość siły elektromotorycznej E, a więc i
prędkości wirnika.
2.3.
Charakterystyki mechaniczne silnika
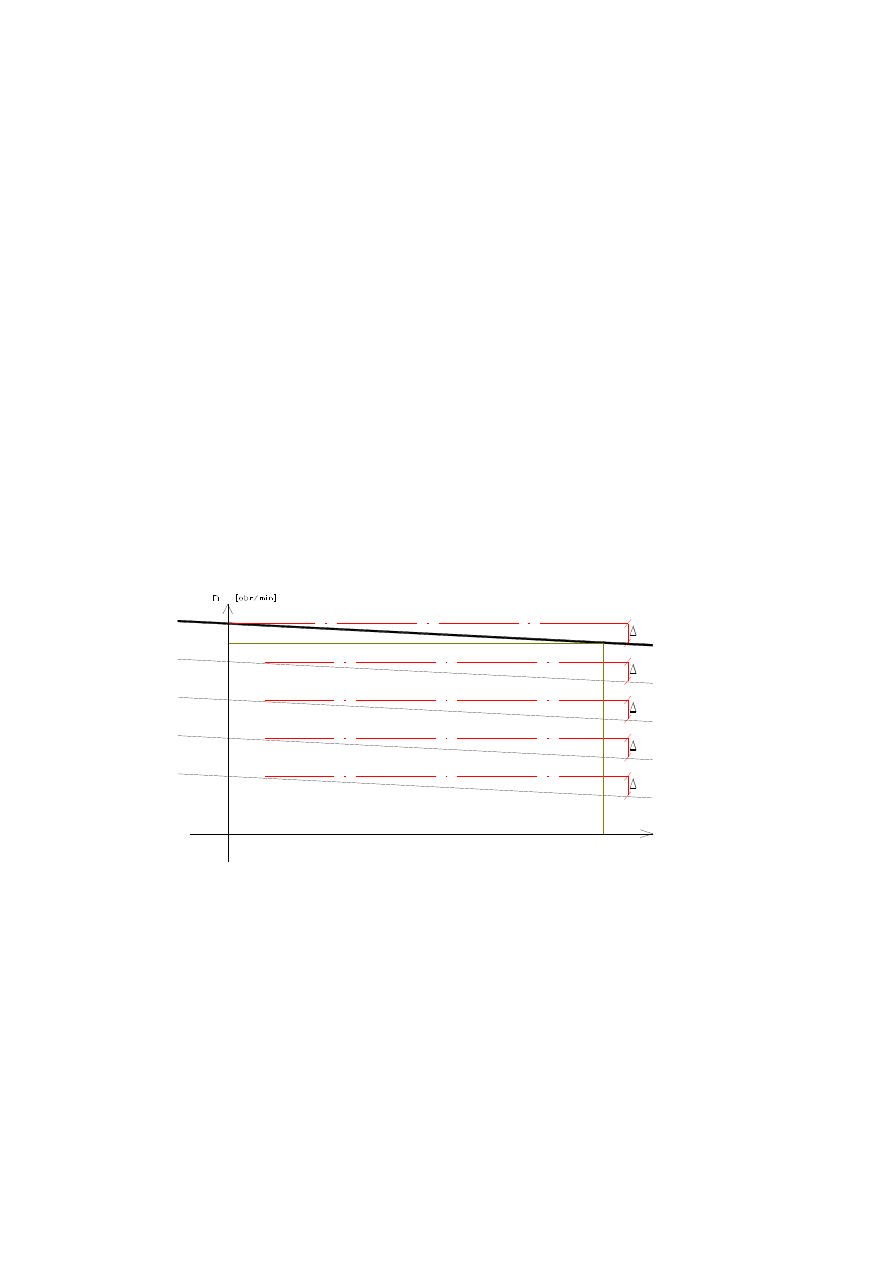
Zależność (1.8 ) prędkości silnika od obciążenia nosi nazwę charakterystyki mechanicznej. W
postaci graficznej zależność ta pokazana jest na rysunku 2.
Rys. 2. Charakterystyki mechaniczne układu z rysunku 1
Z zależności (1.8) widać, że prędkość silnika liniowo maleje ze wzrostem obciążenia,
reprezentowanym przez prąd wirnika.
Zmiana napięcia zasilania: Ua1 > Ua2 > Ua3 > Ua4 > Ua5 powoduje zmianę prędkości
biegu jałowego – n
bj1
> n
bj2
> n
bj3
> n
bj4
> n
bj5
. Zmniejszenie prędkości na skutek
obciążenia nie zależy od napięcia zasilania ∆n1 = ∆n2 = ∆n3 = ∆n4 = ∆n5.
Na rysunku 2 grubą linią jest wyróżniona charakterystyka naturalna. Przechodzi ona przez
punkt pracy znamionowej (I
N
,n
N
– prędkość znamionowa przy znamionowym obciążeniu).
W silniku obcowzbudnym prąd wzbudzenia ma wtedy również wartość znamionową.
nbj4
0
nbj5
nbj1
nbj3
nbj2
nN
M
I
n5
M
N
N
n4
n2
n3
n1
Charakterystyka naturalna wyznacza maksymalne prędkości pracy przy zasilaniu silnika
napięciem znamionowym. Napięcie znamionowe nie powinno być przekraczane, jest to z
założenia największe napięcie dopuszczalne dla silnika nie powodujące niekorzystnych zmian
przy pracy ciągłej.
W silniku obcowzbudnym stała elektromechaniczna ke jest proporcjonalna do strumienia
wzbudzenia. Znamionowy prąd uzwojenia wzbudzenia (a więc i strumień wzbudzenia) ma z
założenia największą możliwa wartość. Jego zwiększenie spowodowało by przegrzanie
uzwojenia, nasycenie magneśnicy – pracę powyżej „kolana magnesowania”. Zatem prąd
wzbudzenia może być tylko zmniejszany. Zmianę taką stosuje się wtedy, gdy potrzeba
uzyskać prędkość większą od znamionowej. Uzyskuje się wtedy zwiększenie prędkości biegu
jałowego (nbjn < nbj1 < nbj2 < nbj3 < nbj4), ale i zwiększenie ubytku prędkości na
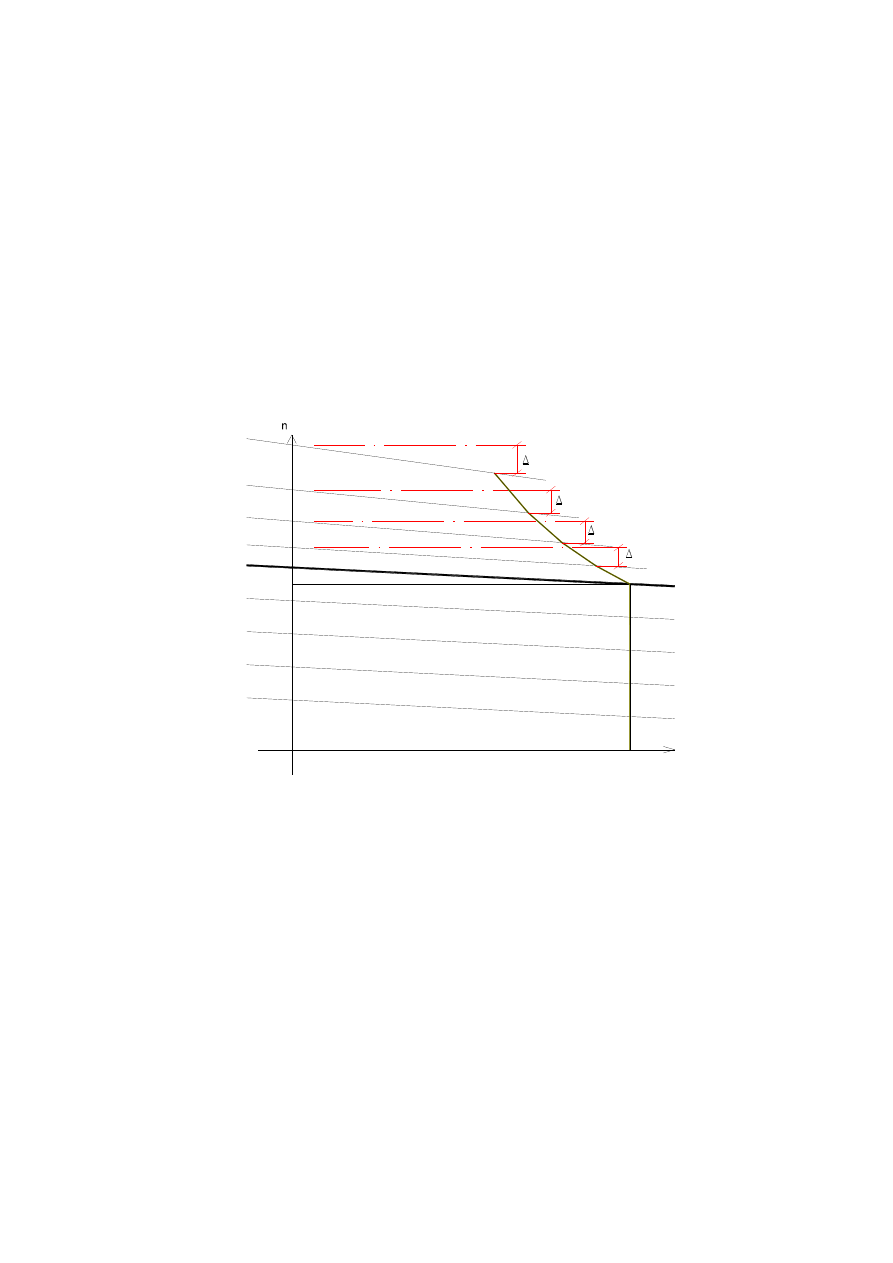
skutek obciążenia (∆n1 < ∆n2 < ∆n3 < ∆n4). Charakterystyki takie pokazuje rysunek 3.
I
Rys. 3. Charakterystyki mechaniczne silnika obcowzbudnego przy
osłabionym wzbudzeniu.
Charakterystyki pokazane na rysunku odpowiadają zmniejszeniu prądu wzbudzenia
odpowiednio do: 0.9, 0.8, 0.7 i 0.6 wartości znamionowej tego prądu.
Zmniejszenie prądu wzbudzenia powoduje zmniejszenie momentu wytwarzanego w silniku.
Wartości momentu wytwarzanego w silniku, dla znamionowej wartości prądu silnika leżą na
linii ABC.
Przy regulacji prędkości za pomocą zmiany napięcia zasilania silnika od 0 do napięcia
znamionowego moment ma wartość stałą i równą wartości znamionowej. Z tego względu
regulacja prędkości w tym zakresie nosi nazwę regulacji przy stałym momencie.
Przy regulacji prędkości za pomocą zmniejszania prądu wzbudzenia moment silnika przy
znamionowej wartości prądu twornika maleje, jego wartości można wyznaczyć na krzywej
BC. Iloczyn momentu i prędkości wyraża moc pracującego silnika Iloczyn współrzędnych
punktów leżących na tej krzywej (M * n = P) jest stały. Z tego względu regulacja
prędkości w tym zakresie nosi nazwę regulacji przy stałej mocy.
M
0
nbjn
nN
nbj2
nbj1
nbj3
M
A
N
I
N
C
n1
B
N
I
n3
n4
n2
nbj4
Charakterystyki pokazane na rysunkach 2 i 3 są przedłużone na lewą stronę osi rzędnych. Jest
to możliwe tylko w takich układach, w których prąd układu zasilającego silnik może zmienić
kierunek. Jeżeli układ zasilający silnik może zmienić również polaryzację napięcia
zasilającego, to praca silnika w takim układzie może odbywać się we wszystkich czterech
ć
wiartkach układu współrzędnych M, n. Ilość ćwiartek układu współrzędnych M, n, w
których jest możliwa praca silnika charakteryzuje jego możliwości i jest nazywana jedno,
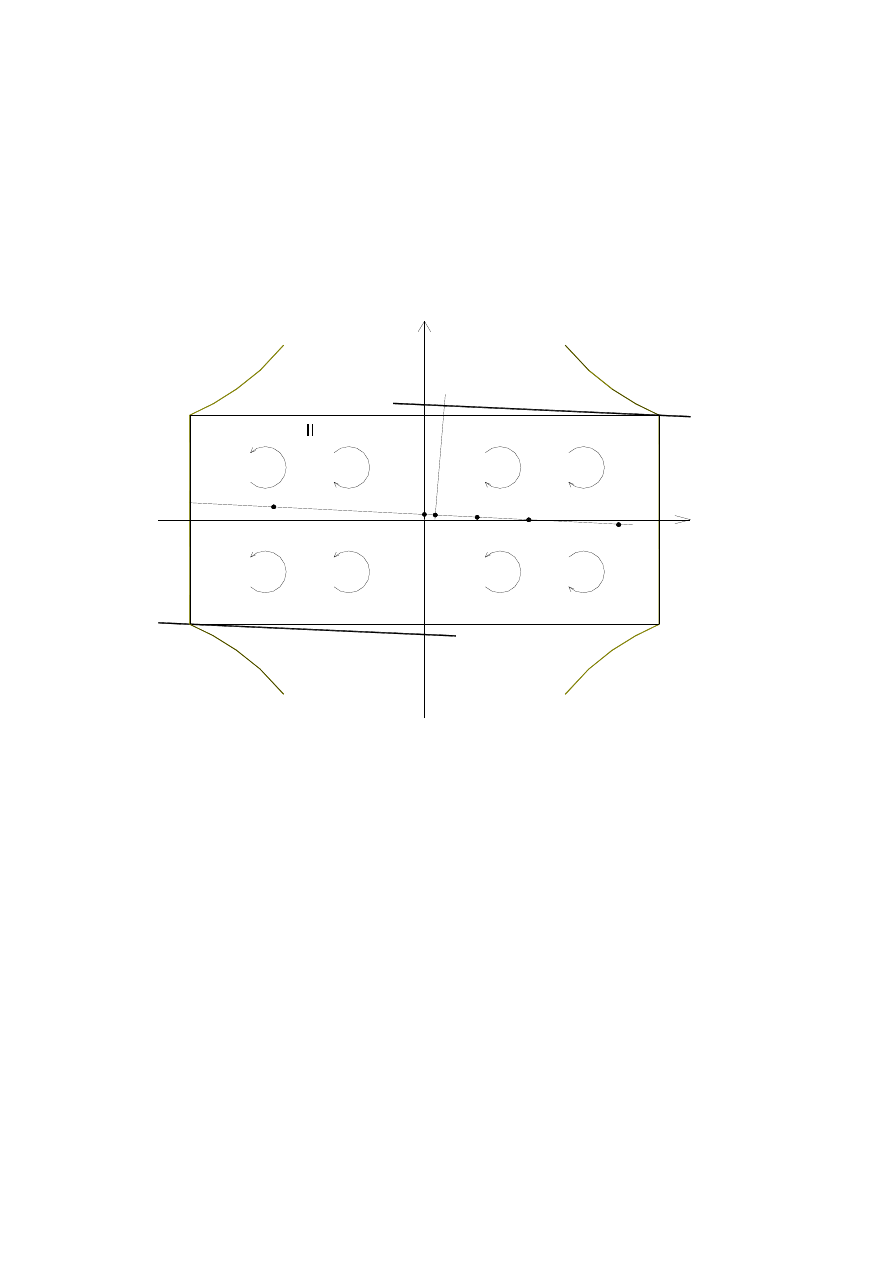
dwu lub cztero ćwiartkowa (cztero kwadrantowa). Na rysunku 4 pokazane są obszary pracy
układu cztero ćwiartkowego (cztero kwadrantowego).
Rys. 4. Obszar pracy układu 4-ro ćwiartkowego (4-ro kwadrantowego)
Numery ćwiartek podane są cyframi rzymskimi: I, II, III, IV. Krzywa Mbj przedstawia
moment biegu jałowego w ćwiartce I układu. Strzałki przy symbolach n – prędkości i M –
momentu, pokazują kierunek prędkości i kierunek momentu wytwarzanego w silniku. Na
wybranej charakterystyce mechanicznej przechodzącej przez trzy ćwiartki zaznaczone są
charakterystyczne punkty pracy.
•
punkt 1: kierunek wytworzonego momentu i kierunek prędkości zgodne – praca silnikowa
– silnik napędza maszynę roboczą,
•
punkt 2: kierunek wytworzonego momentu i kierunek prędkości zgodne – praca silnikowa
– silnik pokonuje tylko opory biegu jałowego,
•
punkt 3: silnik nie wytwarza momentu, prąd przez silnik nie płynie, silnik obraca się z
prędkością idealnego biegu jałowego, napędzany przez maszynę roboczą,
•
punkt 4: silnik jest napędzany przez maszynę roboczą, siła elektromotoryczna
wytworzona w silniku ma większa wartość od napięcia zasilającego silnik, silnik pracuje
jako prądnica i wytwarza moment hamujący, stan taki nosi nazwę hamowania
prądnicowego,
•
punkt 5: stan zwarcia, silnik jest zatrzymany, wytwarza moment za mały, aby napędzić
maszynę roboczą,
n
M
F
E
III
M
D
4
n
-E
-F
M
n
-C
IV
-B
M
Mbj
1
2
3
0
5
n
n
I
C
M
A
6
B
•
punkt 6: prąd w silniku płynie pod wpływem sumy napięcia zasilania i siły
elektromotorycznej indukowanej w silniku, kierunek obrotów silnika jest przeciwny do
wytwarzanego w silniku momentu, stan taki nosi nazwę hamowania przeciwprądem.
Obszar ograniczony krzywymi: CBA-B-C i FED-E-F jest dostępny dla silników
obcowzbudnych, a obszar B-BE-E jest dostępny dla silników z magnesami trwałymi.
3.
Układy napędowe z silnikiem prądu stałego: obcowzbudnym i z magnesami trwałymi
3.1.
Układy sterowania i regulacyjne
W zastosowaniach praktycznych silniki prądu stałego obcowzbudne i z magnesami trwałymi
zasadniczo występują w układach automatycznej regulacji, rzadziej w układach sterowania.
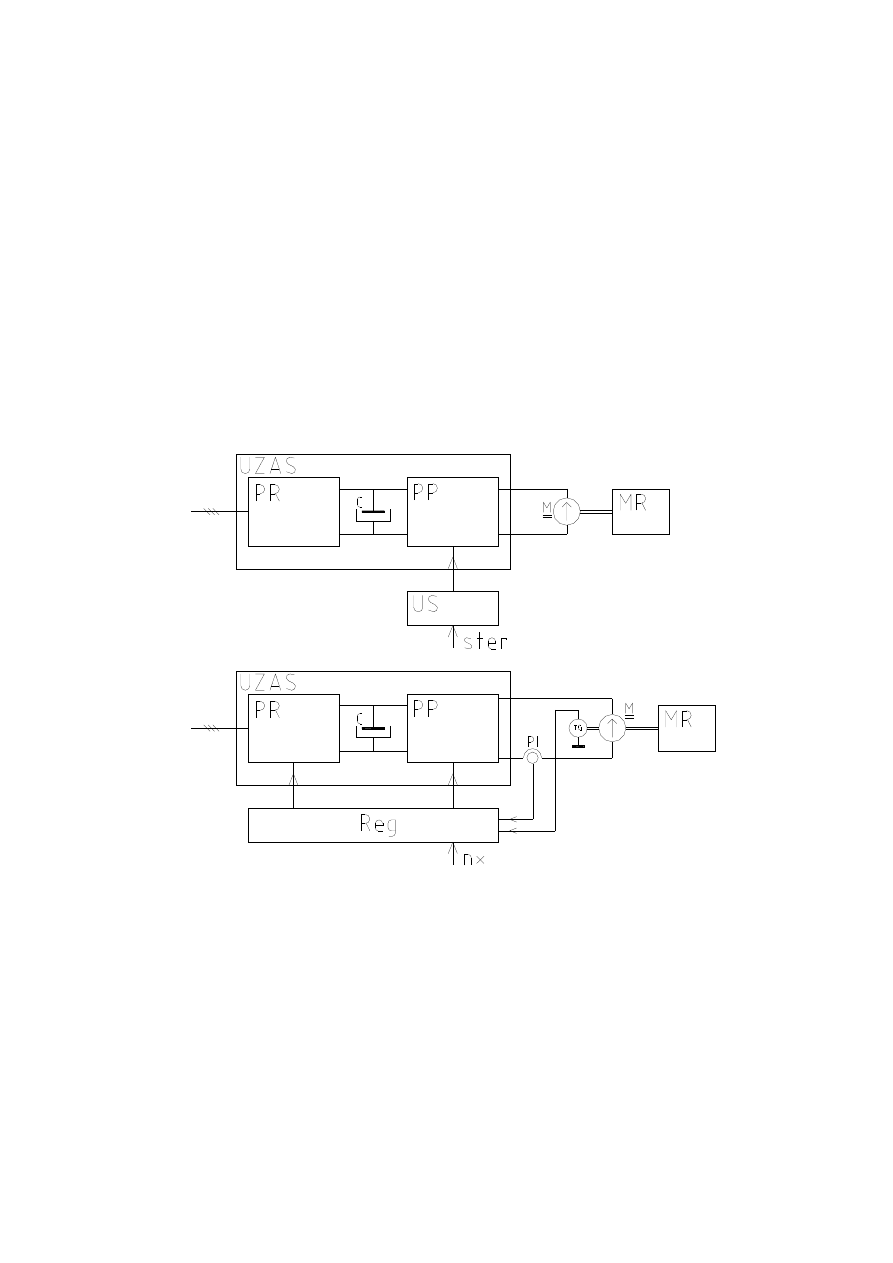
Schematy blokowe takich układów pokazuje rysunek 5.
Rys. 5. Układy napędowe: a) – układ sterowania, b) układ regulacji. UZAS – układ
zasilania silnika. PR – prostownik, PP – przekształtnik półprzewodnikowy, C –
kondensator, US – układ sterowania, Reg – regulator, PI – pomiar prądu, TG –
prądnica tachometryczna, M – silnik, MR – maszyna robocza.
W układzie sterowania silnik sygnałem sterującym można zadać np.: wartość napięcia
zasilającego silnik, prędkość silnika ustali się zgodnie z jego charakterystyką mechaniczną
odpowiadającą napięciu zasilającemu.
W układzie regulacji występują sygnały sprzężeń zwrotnych (na rysunku 5 – prądowego i
prędkościowego). Układ regulacyjny wykorzystuje te sygnały do takiego sterowania układu
zasilającego, aby np.: prędkość układu nie zależała od obciążenia, i prąd nie przekraczał
wartości dopuszczalnych.
b)
a)
Na rysunku 5 pokazano schematy blokowe układów, w których silnik jest zasilany z
przekształtnika półprzewodnikowego – tyrystorowego lub tranzystorowego. Aktualnie
znakomita większość układów napędowych ma taką konstrukcję.
W dawnych rozwiązaniach funkcję układu zasilania spełniała prądnica prądu stałego
napędzana silnikiem klatkowym. Układ taki mógł pracować w 4-rech ćwiartkach układu M,n
zarówno w pierwszej strefie regulacji – przez zmianę napięcia zasilania silnika przy pomocy
zmiany prądu wzbudzenia prądnicy, jak i w drugiej strefie – przez zmianę prądu wzbudzenia
silnika.
Przekształtniki tranzystorowe wymagają zasilania ze źródła prądu stałego, stąd na rysunku 5
w układzie zasilania UZAS występują prostowniki PR. Praktycznie pierwotnym źródłem
zasilania ogólnie dostępnym jest sieć przemysłowa prądu przemiennego.
Przekształtniki tyrystorowe bezpośrednio przekształcają energię prądu przemiennego na
energię prądu stałego. Przekształtnik taki pełni funkcję prostownika sterowanego i na jego
wyjściu występuje napięcie o wartości zadanej sygnałem sterującym w układzie sterowania –
rys. 5a, lub o wartości określonej przez regulator w układzie regulacji – rys. 5b.
3.2.
Układy z przekształtnikami tyrystorowymi
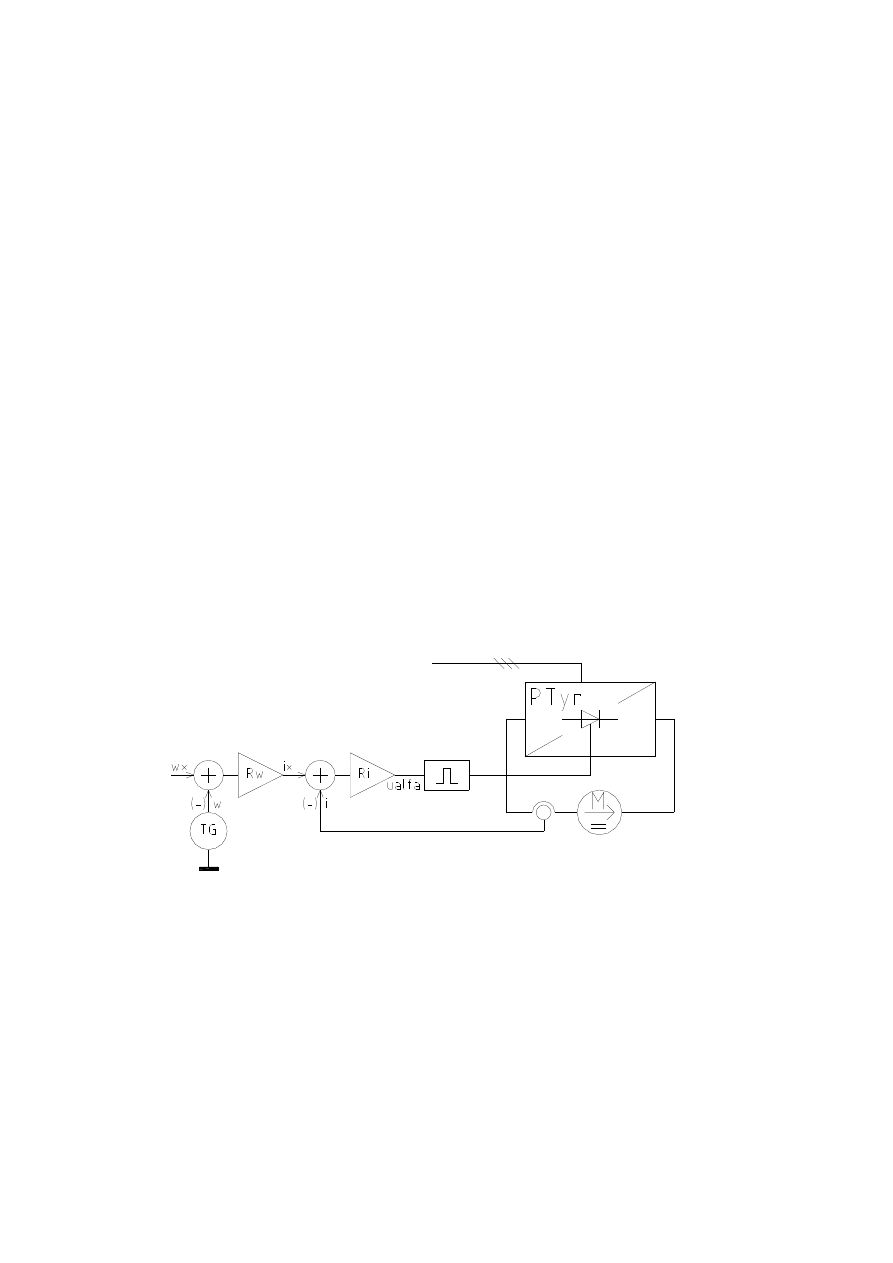
Rys. 6. Schemat ideowy jednokierunkowego układu napędowego z silnikiem prądu
stałego i przekształtnikiem tyrystorowym.
Na rysunku 6 pokazany jest schemat jednokierunkowego układu napędowego z silnikiem
prądu stałego i przekształtnikiem tyrystorowym. Istnieje wiele typów przekształtników. W
zależności od konstrukcji przekształtnika układ może mieć różne właściwości. Układ
zasadniczo pracuje w I ćwiartce układu współrzędnych M,n. Jeżeli przekształtnik składa się
wyłącznie z tyrystorów możliwa jest również praca takiego układu w ćwiartkach I i IV.
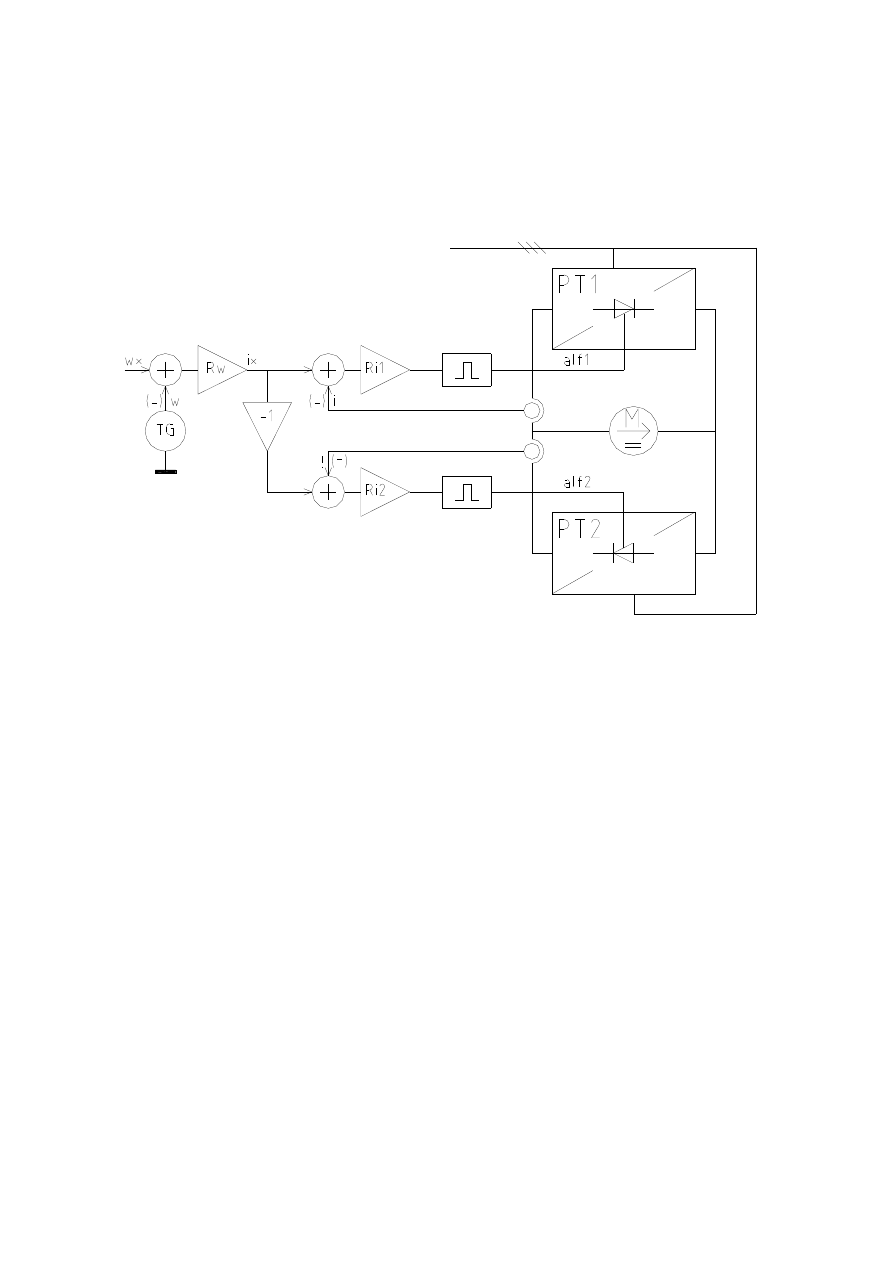
Dla uzyskania dwukierunkowego przepływu prądu przez silnik, konieczne jest zastosowanie
dwóch w pełni sterowanych przekształtników (składających się wyłącznie z tyrystorów)
połączonych odwrotnie równolegle – jak na rysunku 7. Układ ten może pracować w czterech
ć
wiartkach układu współrzędnych M,n.
Rys. 7. Schemat ideowy dwukierunkowego układu napędowego z silnikiem prądu
stałego i przekształtnikiem tyrystorowym
3.3.
Sposoby sterowania kluczami przekształtnika tranzystorowego.
Przekształtniki tranzystorowe stosowane w układach napędowych zbudowane są z
tranzystorów mocy. Tranzystory te stosowane są jako klucze – ich impedancja zmienia się
skokowo od bliskiej zeru do kilkuset kiloomów.
Jak pokazano na rysunku 5 przekształtnik półprzewodnikowy (w tym przypadku
przekształtnik tranzystorowy) jest z jednej strony dołączony do obwodu prądu stałego, z
drugiej do odbiornika – silnika prądu stałego. Zmianę wartości średniej napięcia
dostarczonego do odbiornika uzyskuje się przez cykliczne dołączanie do odbiornika obwodu
prądu stałego. Jeżeli czas trwania impulsu wynosi τ
τ
τ
τ i jest powtarzany po czasie T, to można
wyróżnić 3 sposoby kształtowania czasu trwania tych impulsów:
a – τ
τ
τ
τ
= const, T = var; impulsy o stałym czasie trwania są powtarzane są ze zmienną
częstotliwością,
b – τ
τ
τ
τ
= var, T = const; impulsy o zmiennym czasie trwania są powtarzane są ze stałą
częstotliwością,
c – τ
τ
τ
τ
= var, T = var; zarówno czas trwania impulsów jak i okres ich powtarzania są zmienne
w czasie.
1
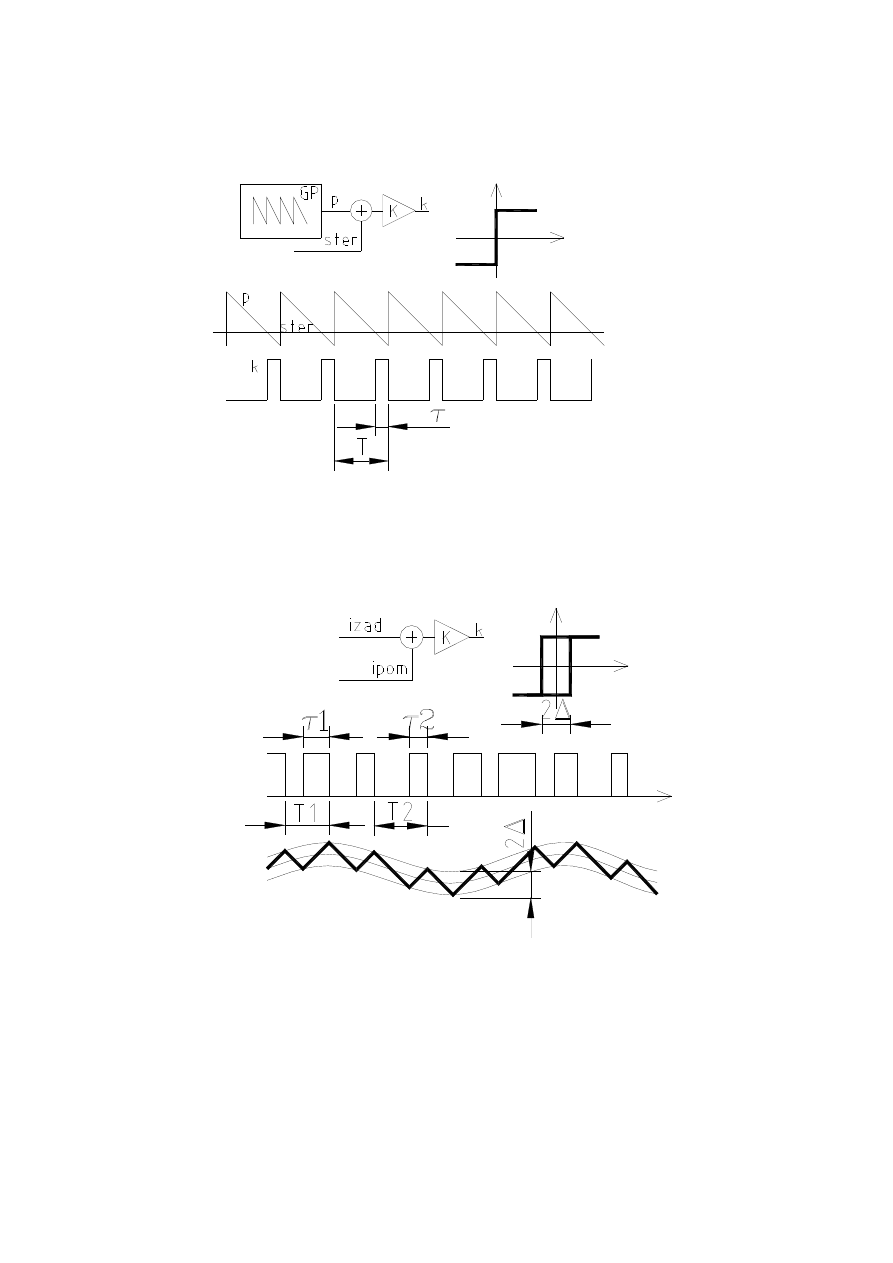
W praktyce stosowane są dwa ostatnie. Na rysunku 8 pokazano schematy ideowe układów
realizujących te sposoby.
Rys. 8. Zasada sterowania kluczami ze stałym okresem T i zmienną wartością czasu
trwania impulsu τ; a) schemat ideowy: GP – generator przebiegu piłokształtnego, K –
komparator, b) charakterystyka komparatora, c) kształtowanie impulsów sterujących
kluczami przekształtnika
Rys. 9. Zasada sterowania kluczami ze zmiennym okresem T i zmienną wartością
czasu trwania impulsu τ: a) schemat ideowy: izad – sygnał wzorcowy pradu, ipom –
sygnał prądu zmierzonego, b) – charakterystyka komparatora z histerezą, c) k –
sygnały wyjściowe komparatora sterujące kluczami przekształtnika, d) – przebieg
prądu – linia gruba
c)
a)
b)
d)
c)
a)
b)
3.4. Przykładowe układy napędowe z silnikiem prądu stałego obcowzbudnym i z magnesami
trwałymi
3.4.1. Układ z jedną polaryzacją napięcia i jednym kierunkiem prądu – silnik napędza
maszynę roboczą
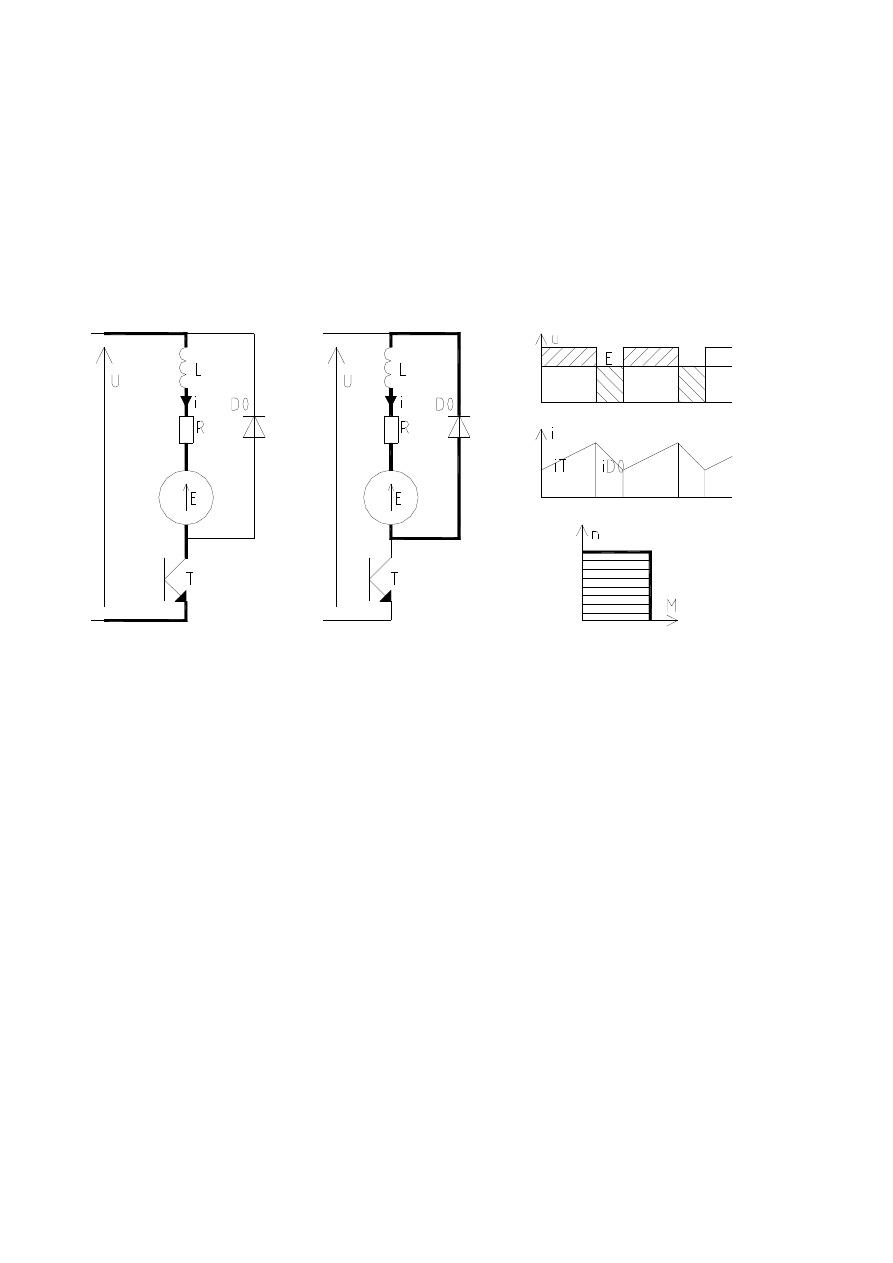
Rys. 10. Układ z jedną (dodatnią) polaryzacją napięcia i jednym (dodatnim)
kierunkiem prądu – silnik napędza maszynę roboczą
Na rysunku 10 przedstawiony jest schemat układu, w którym funkcję przekształtnika pełni
tranzystor T i doda D0. Stała czasowa obwodu twornia jest dużo większa od okresu
kluczowania tranzystora. W tych przedziałach czasu, w których jest wysterowany tranzystor
(rys. 10a) prąd w silniku narasta pod wpływem różnicy napięcia zasilającego U i siły
elektromotorycznej E (rys. 10c). Po wyłączeniu tranzystora obwód prądu silnika zamyka się
przez diodę D0 (rys. 10b). Prąd maleje pod wpływem siły elektromotorycznej E (rys. 10c).
Na tworniku silnika występuje napięcie o kształcie prostokątnym i o jednej polaryzacji.
Obszar pracy układu ogranicza się do pierwszej ćwiartki układu współrzędnych M,n
(rys.10d).
3.4.2. Układ z jedną polaryzacją napięcia i jednym kierunkiem prądu – silnik hamuje maszynę
roboczą
Na rysunku 11 przedstawiony jest schemat układu, w którym funkcję przekształtnika pełni
tranzystor T i doda Dz. Stała czasowa obwodu twornia jest dużo większa od okresu
kluczowania tranzystora. W tych przedziałach czasu, w których jest wysterowany tranzystor
(rys. 11a) prąd w silniku narasta pod wpływem siły elektromotorycznej. Po wyłączeniu
d)
a)
b)
c)
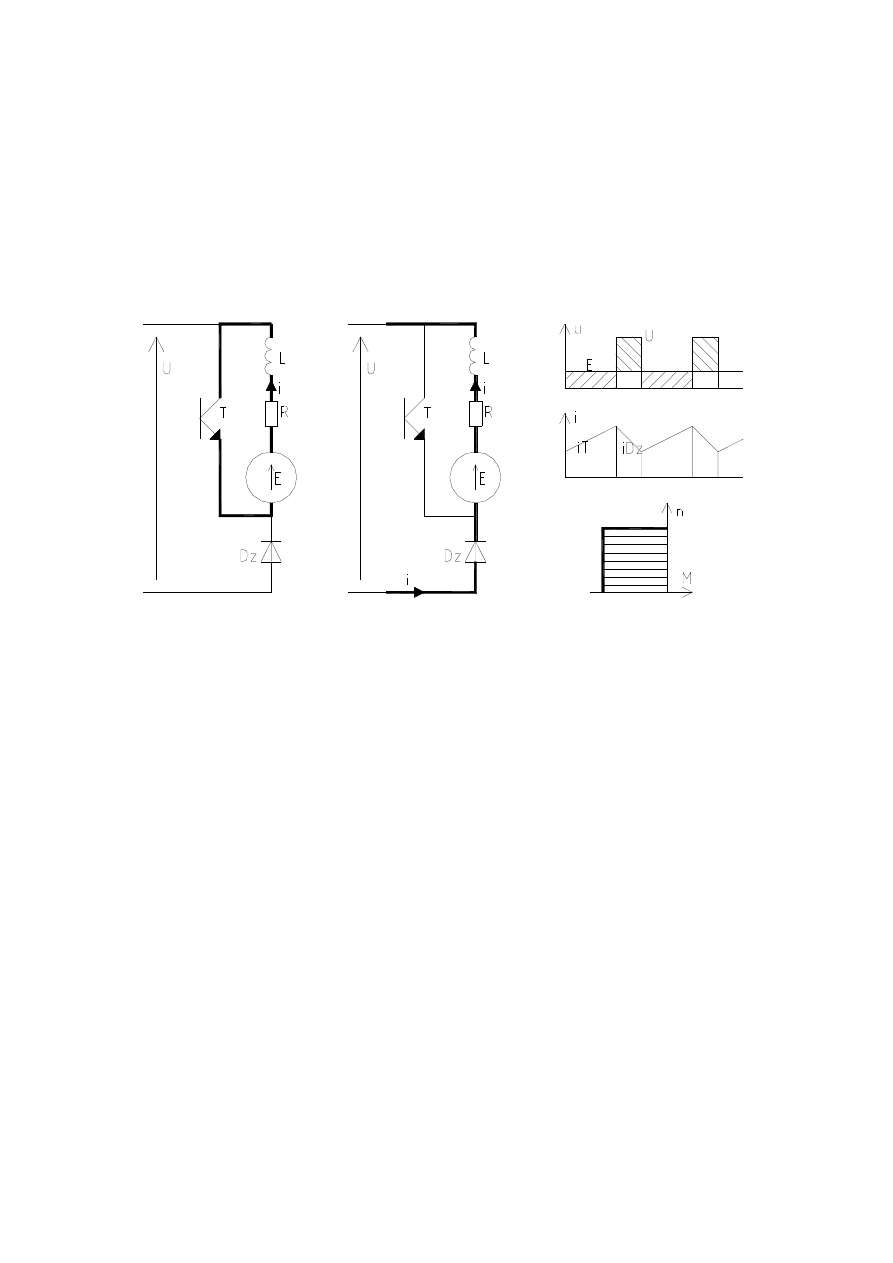
tranzystora prąd silnika płynie przez diodę Dz i źródło zasilające (uwaga: przeciwnie do
napięcia tego źródła). Prąd ten maleje pod wpływem różnicy napięcia zasilającego U i siły
elektromotorycznej E (rys. 11c).
Na tworniku silnika występuje napięcie o kształcie prostokątnym i o jednej polaryzacji -
dodatniej. Obszar pracy układu ogranicza się do drugiej ćwiartki układu współrzędnych M,n
(rys.11d).
Rys. 11. Układ z jedną (dodatnią) polaryzacją napięcia i jednym (ujemnym)
kierunkiem prądu – silnik hamuje maszynę roboczą
3.4.3. Układ z jedną polaryzacją napięcia i prądem płynącym w obu kierunkach
Na rysunku 12 przedstawiony jest schemat układu, w którym funkcję przekształtnika pełnią
tranzystory T1 i T2 oraz diody D0 i Dz. Układ jest sumą układów z rysunku 10 i 11.
Przy zablokowanym tranzystorze T2 i kluczowanym tranzystorze T1 układ pracuje tak, jak
układ z rysunku 10 (patrz rys. 12 a, b i c). A przy zablokowanym tranzystorze T1 i
kluczowanym tranzystorze T2 układ pracuje tak, jak układ z rysunku 11 (patrz rys. 12d, e i f).
Silnik pracujący w tym układzie może napędzać maszynę roboczą i może ją hamować.
Praca silnikowa wystąpi, gdy średnia wartość napięcia dostarczona do silnika przez
kluczowanie tranzystora T1 jest wieksza od siły elektromotorycznej indukowanej w silniku.
Aby uzyskać hamowanie należy po zablokowaniu tranzystora T1 tak kluczować tranzystor
T2, aby średnia wartość napięcia dostarczonego do silnika przez kluczowanie tranzystora T2
była mniejsza od siły elektromotorycznej indukowanej w silniku.
Na tworniku silnika występuje napięcie o kształcie prostokątnym i o jednej polaryzacji.
Obszar pracy układu wystepuje w pierwszej i drugiej ćwiartce układu współrzędnych M,n
(rys.12g).
d)
b)
a)
c)
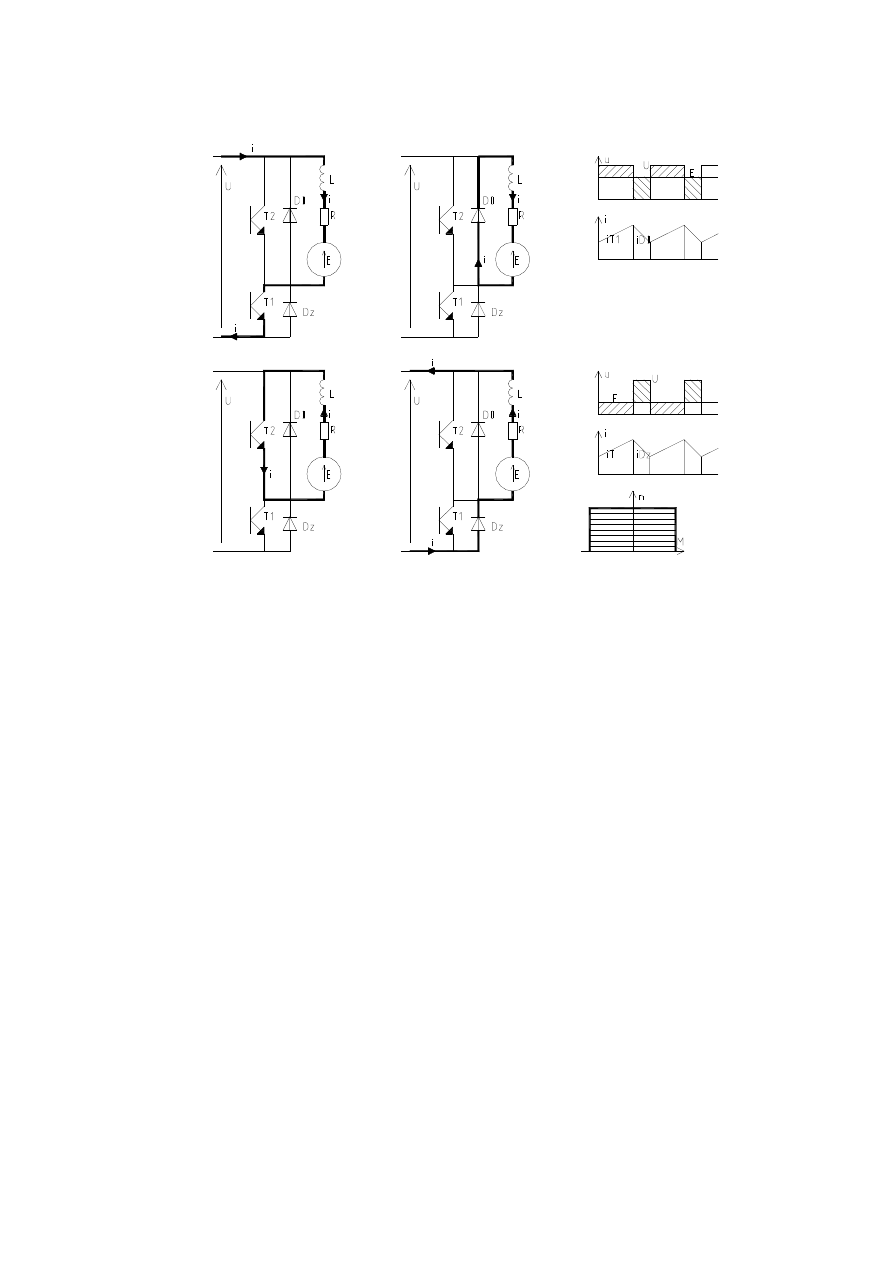
Rys. 12. Układ z jedną (dodatnią) polaryzacją napięcia i prądem płynącym w
dodatnim lub ujemnym kierunku – silnik napędza lub hamuje maszynę roboczą
3.4.4. Układ z dodatnią i ujemną polaryzacją napięcia i prądem płynącym w jednym kierunku
Na rysunku 13 przedstawiony jest schemat układu, w którym funkcję przekształtnika pełnią
tranzystory T1 i T2 oraz diody D1 i D2.
Oba tranzystory sa jednoczesnie sterowane. Przy wysterowanych tranzystorach prąd narasta,
po ich zablokowaniu napięcie indukowane w indukcyjności L wymusza przepływ prądu przez
diody D1 i D2. Przy przewodzacych tyrystorach napięcie na odbiorniku jest dodatnie, przy
przewodzących diodach – ujemne.
Gdy silnik napędza maszynę roboczą, jego siła elektromotoryczna jest dodatnia i czas
przewodzenia tranzystorów w okresie jest dłuższy niż czas przewodzenia diod.
Przy odwrotnym kierunku wirowania silnika jego siła elektromotoryczna jest ujemna. Czas
przewodzenia tranzystorów jest krótszy niż czas przewodzenia diod. Prąd w układzie płynie w
kierunku zgodnym z kierunkiem siły elektromotorycznej – silnik pracuje jako prądnica i
wytwarza moment hamujący.
Na tworniku silnika występuje napięcie o kształcie prostokątnym i o obu polaryzacjach.
Obszar pracy układu wystepuje w pierwszej i czwartej ćwiartce układu współrzędnych M,n
(rys.13e).
d)
e)
a)
b)
g)
f)
c)
Rys.13. Układ z dodatnią i ujemną polaryzacją napięcia i prądem płynącym w jednym
kierunku – silnik napędza lub hamuje maszynę roboczą
3.4.5. Układ z dodatnią i ujemną polaryzacją napięcia i prądem płynącym w obu kierunkach
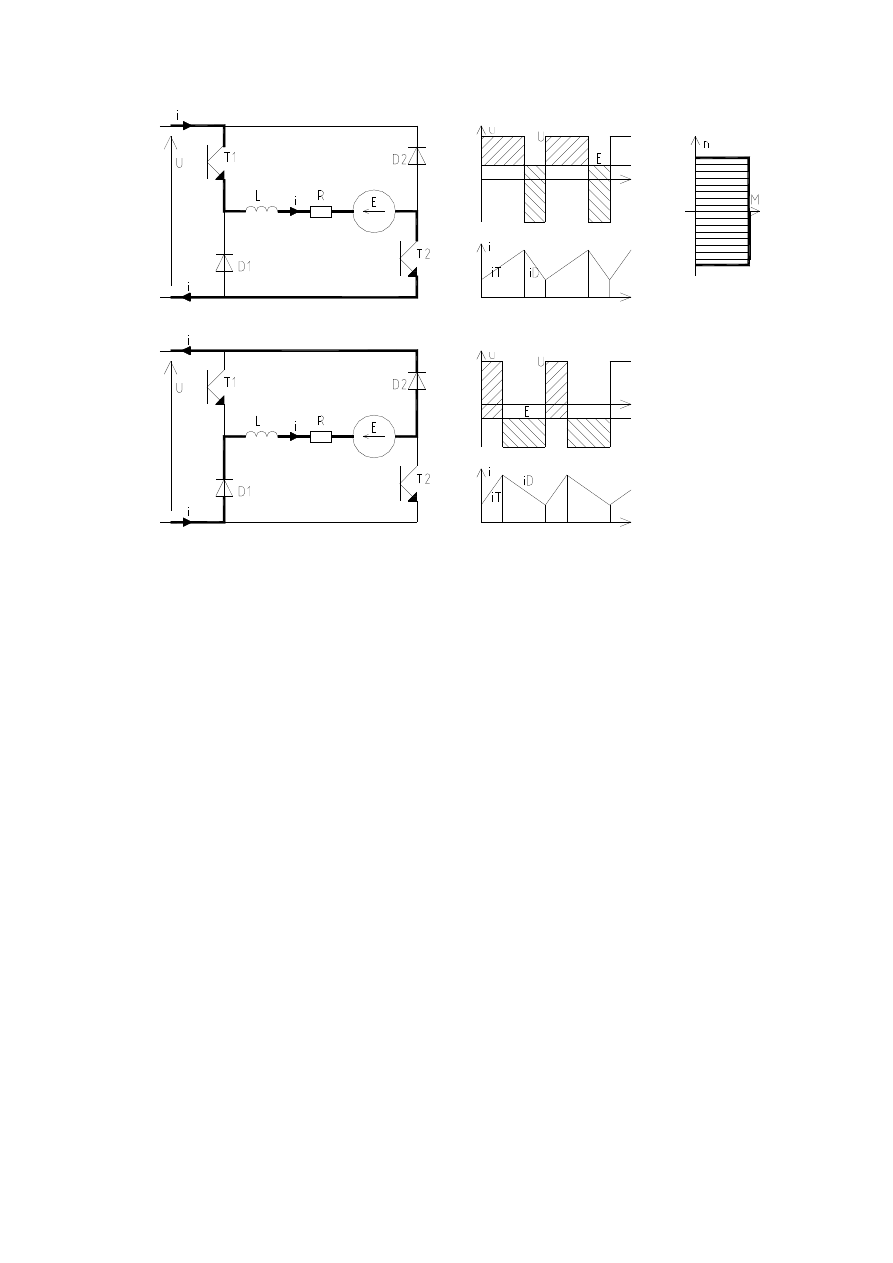
Na rysunkach 14, 15 i 16 przedstawiono najbardziej uniwersalny układ przekształtnika.
Tranzystory tworzą mostek.
Jednoczesne sterowanie tranzystorów T1 i T4 (rys. 14) przy zablokowanych tranzystorach T2
i T3 tworzy identyczne obwody i daje identyczne skutki jak układ z rysunku 13. Na tworniku
silnika występuje napięcie o kształcie prostokątnym i o obu polaryzacjach. Obszar pracy
układu wystepuje w pierwszej i czwartej ćwiartce układu współrzędnych M,n (rys.14e).
Analogicznie jednoczesne sterowanie tranzystorów T2 i T3 (rys. 15) przy zablokowanych
tranzystorach T1 i T4 tworzy analogiczne obwody i daje analogiczne skutki jak układ z
rysunku 13. Na tworniku silnika występuje napięcie o kształcie prostokątnym i o obu
polaryzacjach. Obszar pracy układu wystepuje w drugiej i trzeciej ćwiartce układu
współrzędnych M,n (rys.15e).
Wybór pary jednocześnie sterowanych tranzystorów pozwala na prace układu we wszystkich
czterech ćwiartkach układu współrzednych M,n – rys. 14f i 15f.
b)
a)
d)
c)
e)
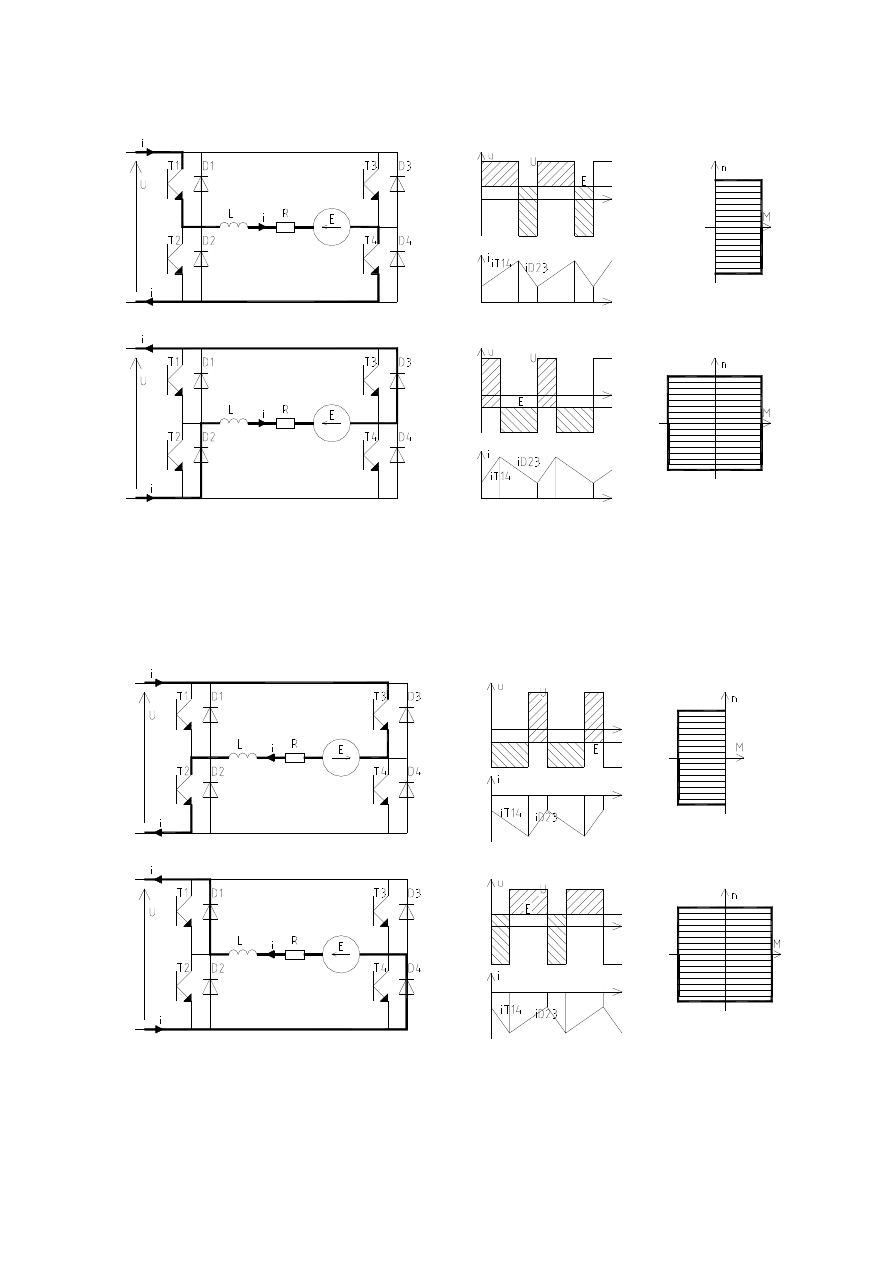
Rys.14. Układ mostkowy; przepływ prądu dodatniego, możliwa polaryzacja dodatnia i
ujemna napięcia na odbiorniku.
Rys. 15. Układ mostkowy; przepływ prądu ujemnego, możliwa polaryzacja dodatnia i
ujemna napięcia na odbiorniku.
b)
a)
d)
f)
c)
e)
d)
f)
c)
e)
a)
b)
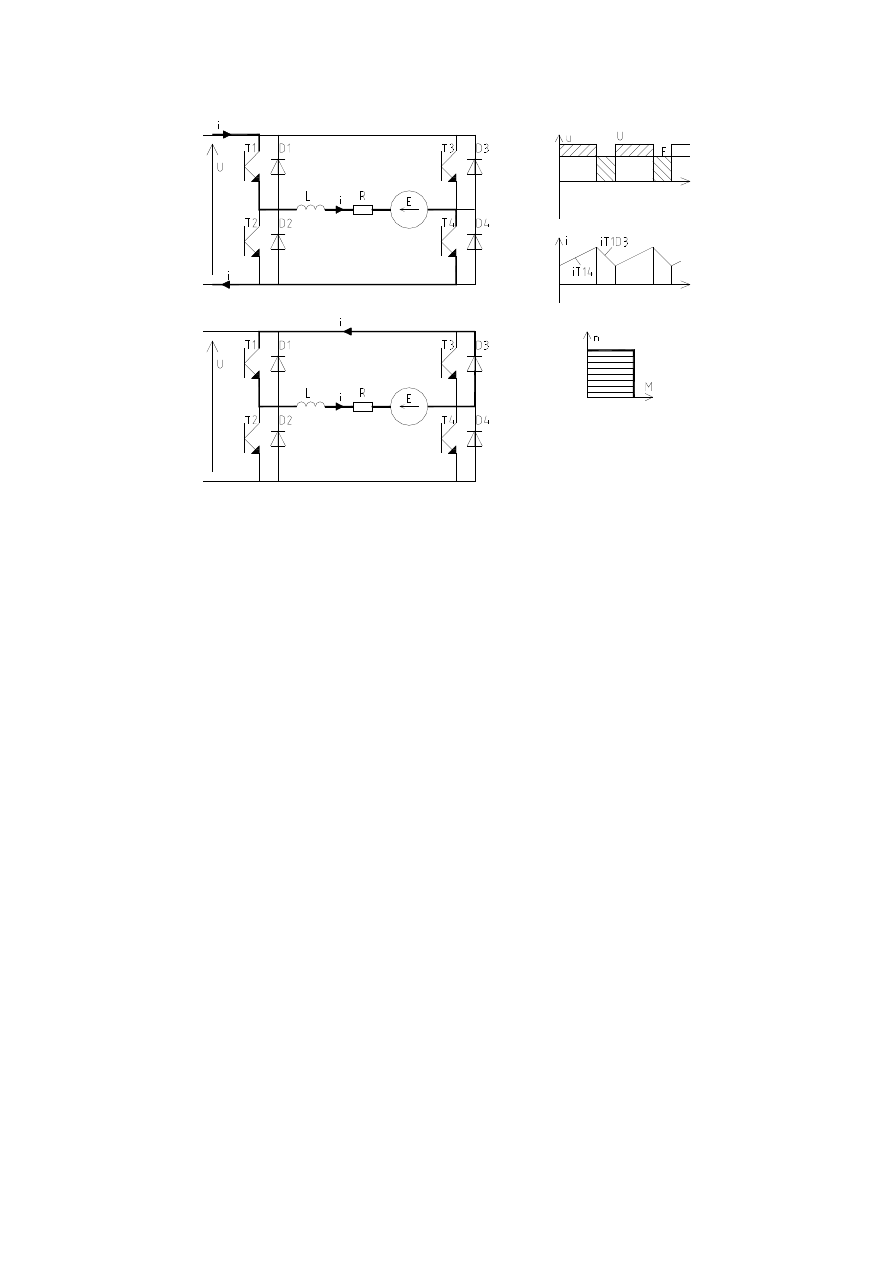
Rys. 16. Układ mostkowy; współpracują 2 tranzystory z przekątnej mostka – jeden
jest wysterowany ciągle (T1), a drugi kluczowany (T4).
W układzie na rysunku 16 tranzystor T1 jest wysterowany ciągle, a tranzystor T4 jest
kluczowany, pozostałe tranzystory pozostają zablokowane. W tej sytuacji prąd może płynąć
tylko w jedną stronę, napięcie na odbiorniku ma kształt prostokątny o jednej polaryzacji.
Przy ewentualnej zmianie kierunku siły elektromotorycznej na skutek zmiany prędkości nie
można wymusić przez sterowanie tranzystora T4 ograniczenia wartości prądu. Układ pracuje
w pierwszej ćwiartce układu współrzędnych M,n.
Dokładnie takie same przebiegi prądu i napięcia dostarczonego do odbiornika można uzyskać
przy wysterowanym ciągle tranzystorze T4 i kluczowanym tranzystorze T1.
Analogiczne zachowanie układu występuje przy współpracy tranzystorów T2 i T3. Prąd
odbiornika płynie w przeciwnym kierunku. Układ pracuje w trzeciej ćwiartce układu
współrzędnych M,n.
4.
Instrukcja do wykonania ćwiczenia
Obszerna instrukcja do badania silnika z magnesami trwałymi zamieszczona jest w pracy:
„Laboratorium podstaw napędu elektrycznego w robotyce” autorów; J. Łastowiecki, K.
Duszczyk, J. Przybylski, A. Ruda, J. Sidorowicz, Z. Szulc, wydanej w 2001 roku przez
Oficynę Wydawniczą Politechniki Warszawskiej.
W ramach odrabianego ćwiczenia należy:
•
na podstawie obserwowanych przebiegów prądu i napięcia silnika określić rodzaj
stosowanego sterowania tranzystorami
•
wyznaczyć charakterystyki sterowania przy biegu jałowym mierząc:
- napięcie sterujące,
- napięcie zasilające układ,
b)
d
a)
c)

- stosunek czasu impulsowania do okresu powtarzania,
- napięcie na zaciskach silnika,
- prąd pobierany przez silnik,
- prędkość obrotowa silnika.
•
wyznaczyć kilka charakterystyk mechanicznych (wg poleceń prowadzącego) mierząc
wielkości podane wyżej, a ponadto moment obciążenia, porównać te charakterystyki z
charakterystyką naturalną,
•
podczas pomiarów należy obserwować przebiegi prądu i napięcia doprowadzonego do
silnika.
Wyszukiwarka
Podobne podstrony:
silniki prądu stałego
silnik pradu stalego
Model silnika pradu stalego id Nieznany
Badanie silnika pradu stałego
silnik prądu stałego (tyrystor), Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola
DTR Silnik prądu stałego LD 020 LD 030 LD 055 2
silnik prądu stałego sterowany1, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola
Ściągi z fizyki-2003 r, Silnik prądu stałego i prądnica prądu zmiennego
Silnik prądu stałego sprawko
bezszczotkowy silnik pradu stalego
sprawozdanie silnik prądu stałego obcowzbudny rozruch?z obciążenia na wale pomiary dynamiczne
Ćwiczenie P1, Silnik prądu stałego p1 i
DTR Silnik prądu stałego LDa 280 LDa327a
P1 Silnik prądu stałego formatka
Ćwiczenie P1, Silnik prądu stałego p1 f
laboratorium silniki prądu stałego
Silnik prądu stałego, Fizyka
Automatyka Układ automatycznej regulacji w silnikach prądu stałego
regulacja prędkości kątowej obcowzbudnego silnika prądu stałego za pomocą przerywacza tyrystorowego
więcej podobnych podstron