Instytut Automatyki
Zakład Teorii Sterowania
Podstawy automatyki i teoria sterowania
Krzysztof Marzjan
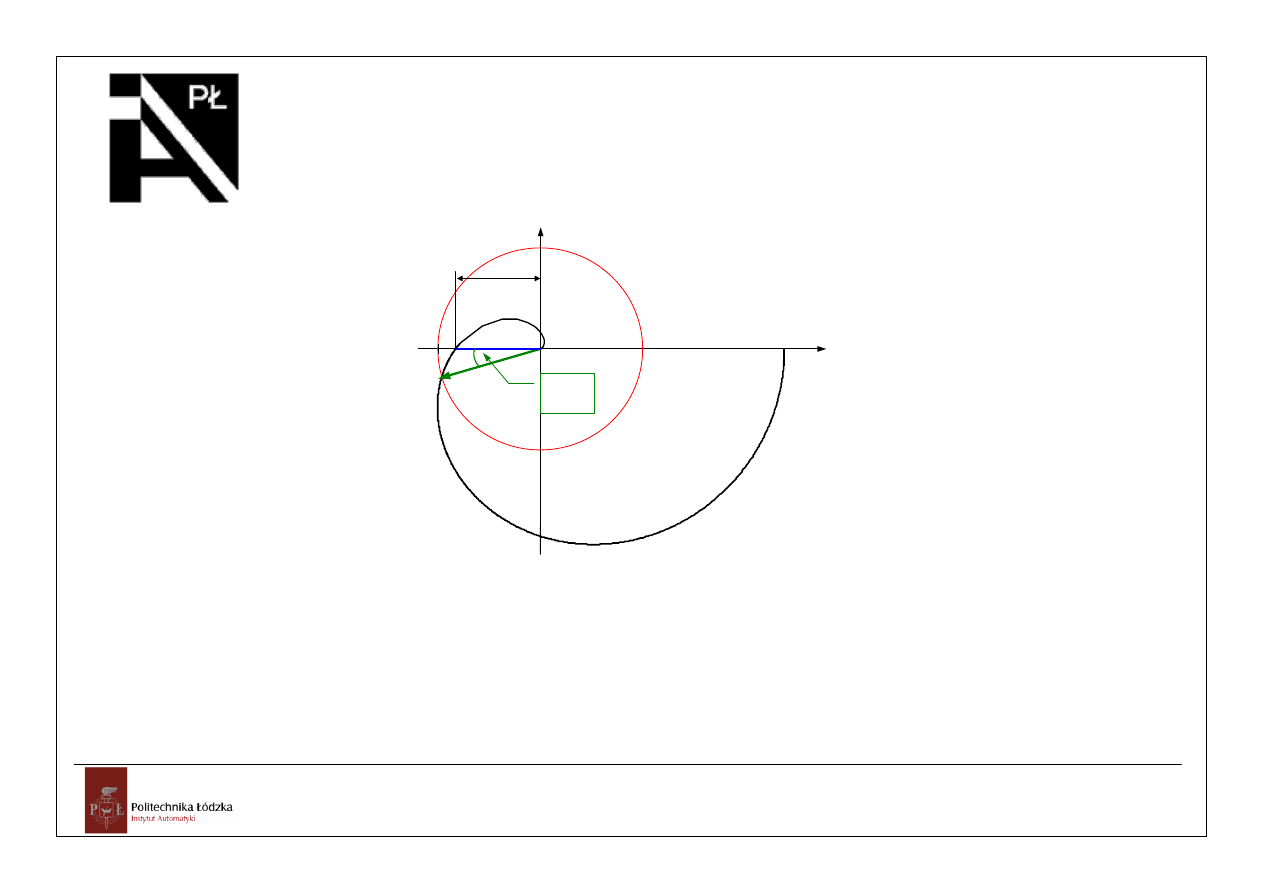
Re{G(jω)}
Im{G(jω)}
k
)
0
,
1
(
j
d
Δφ
2
stabilność układów ciągłych
Stabilność układów automatycznej regulacji.
UAR jest stabilny wtedy i tylko wtedy gdy pierwiastki równania charakterystycznego leżą w
l
ewej półpłaszczyźnie zmiennej zespolonej.
0
)
(
)
(
)
(
)
(
s
M
s
M
s
L
s
G
0
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
A
sI
det
s
M
t
Du
t
Cx
t
y
t
Bu
t
Ax
t
x
dt
d
Przyjmujemy:
0
1
2
2
2
2
1
1
)
(
a
s
a
s
a
s
a
s
a
s
a
s
M
n
n
n
n
n
n
3
stabilność układów ciągłych
Kryteria algebraiczne
Kryterium Hurwitz’a
Warunek konieczny
Wszystkie współczynniki równania charakterystycznego istnieją i są dodatnie.
Warunek wystarczający
Budujemy wyznacznik
0
2
1
0
4
3
2
2
3
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
a
a
a
a
a
a
a
a
a
a
a
n
n
n
n
n
Wyznacznik
n
oraz wszystkie podwyznaczniki główne
1
,
2
,
1
n
i
i
są dodatnie:
1
1
n
a
2
3
1
2
n
n
n
n
a
a
a
a
5
6
7
2
3
4
1
3
0
n
n
n
n
n
n
n
n
a
a
a
a
a
a
a
a
warto zauważyć, że jeżeli warunek konieczny jest spełniony to wystarczy obliczyć wyznaczniki od
2
do
1
n
, bo
1
0
n
n
a
współczynniki równania charakterystycznego
zwiększanie indeksu
zmniejszanie indeksu
4
stabilność układów ciągłych
Kryterium Routh’a
Warunek konieczny
Wszystkie współczynniki równania charakterystycznego istnieją i są dodatnie.
Warunek wystarczający
Budujemy tablicę
1
1
2
1
2
3
3
2
1
2
1
2
3
3
2
1
0
2
4
5
3
1
1
3
5
4
2
0
1
3
2
1
z
w
c
c
c
c
c
n
b
b
b
b
b
n
a
a
a
a
a
a
n
a
a
a
a
a
a
n
n
n
n
n
n
n
n
n
n
n
współczynniki
równania
charakterystycznego
n - nieparzyste
wielkości
obliczane
numer
wiersza
5
stabilność układów ciągłych
1
1
2
2
2
3
2
1
2
2
2
3
2
1
1
3
5
3
1
0
2
4
4
2
0
1
3
2
0
1
z
w
c
c
c
c
c
n
b
b
b
b
b
n
a
a
a
a
a
n
a
a
a
a
a
a
n
n
n
n
n
n
n
n
n
n
n
współczynniki
równania
charakterystycznego
n - parzyste
wielkości
obliczane
numer
wiersza
6
stabilność układów ciągłych
1
3
1
2
1
n
n
n
n
n
a
a
a
a
a
b
1
5
1
4
2
n
n
n
n
n
a
a
a
a
a
b
0
1
1
0
2
1
0
1
1
2
1
0
a
a
a
a
a
b
lub
a
a
a
a
a
b
n
n
n
n
n
n
n
n
1
2
1
3
1
1
b
b
b
a
a
c
n
n
1
3
1
5
1
2
b
b
b
a
a
c
n
n
Układ jest stabilny jeżeli w pierwszej kolumnie tablicy Routh’a wszystkie współczynniki są dodatnie.
Ilość zmian znaku w tej kolumnie jest równa liczbie pierwiastków w prawej półpłaszczyźnie.
7
stabilność układów ciągłych
Kryterium Nyquista
Układ otwarty o transmitancji operatorowej
)
(
)
)(
(
)
(
,
)
(
)
(
)
(
0
02
01
0
0
0
0
n
s
s
s
s
s
s
s
M
s
M
s
L
s
G
i transmitancji widmowej
j
s
s
G
j
G
)
(
)
(
0
0
daje układ zamknięty o transmitancji
)
(
)
)(
(
)
(
,
)
(
)
(
)
(
)
(
)
(
)
(
2
1
0
0
0
0
n
s
s
s
s
s
s
s
M
s
M
s
L
s
M
s
L
s
L
s
G
Twierdzenie
Jeżeli M
0
(s) ma k
pierwiastków w prawej i n-k lewej półpłaszczyżnie zmiennej zespolonej (nie ma
pierwiastków na osi liczb urojonych), to M(s) ma n pierwiastków w lewej półpłaszczyźnie wtedy i tylko
wtedy gdy:
2
2
)
(
1
2
)
(
1
0
0
0
k
j
G
arg
k
j
G
arg
(charakterystyka amplitudowo
– fazowa układu otwartego
)
(
0
j
G
przy zmianie pulsacji od
do
obejmuje w dodatnim kierunku trygonometrycznym punkt (-1, j0) k razy).
8
stabilność układów ciągłych
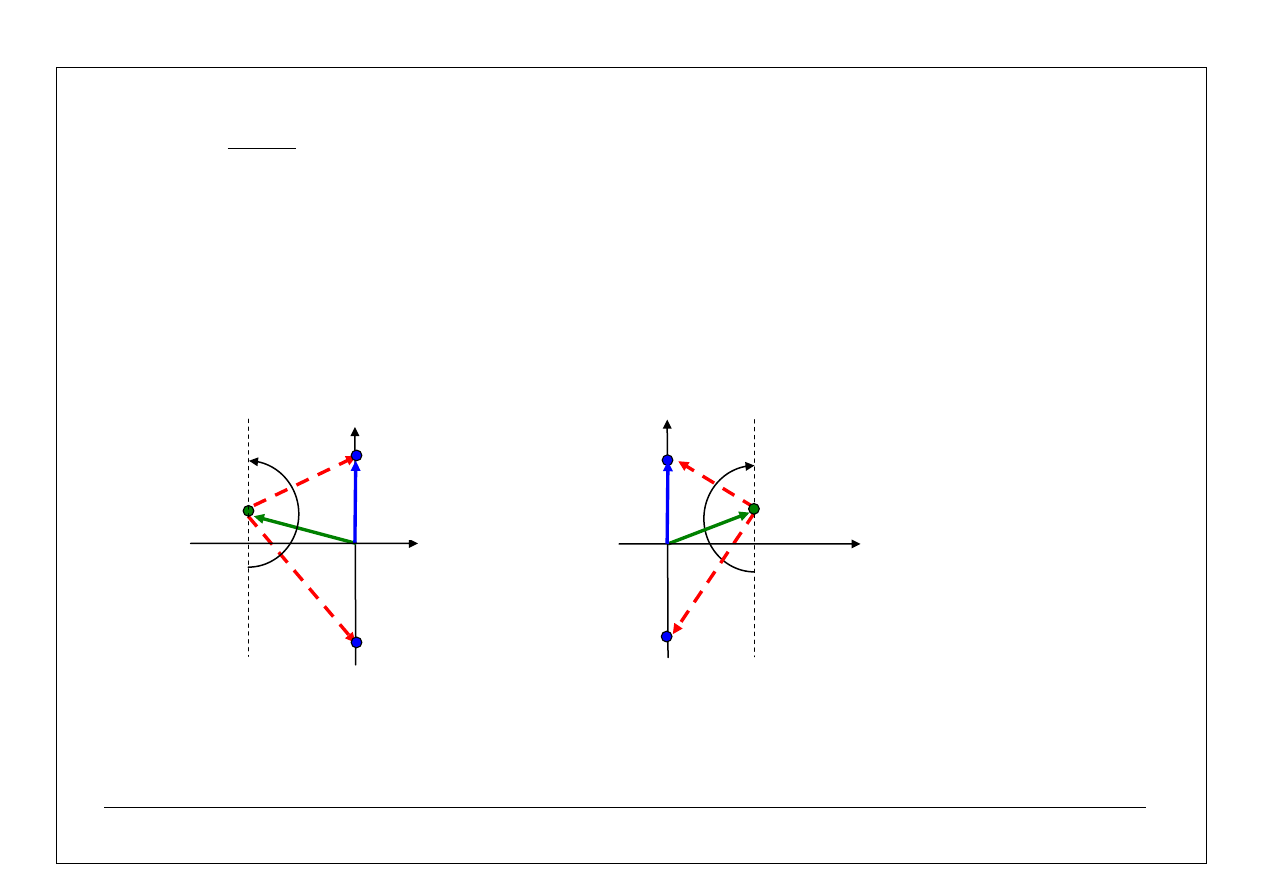
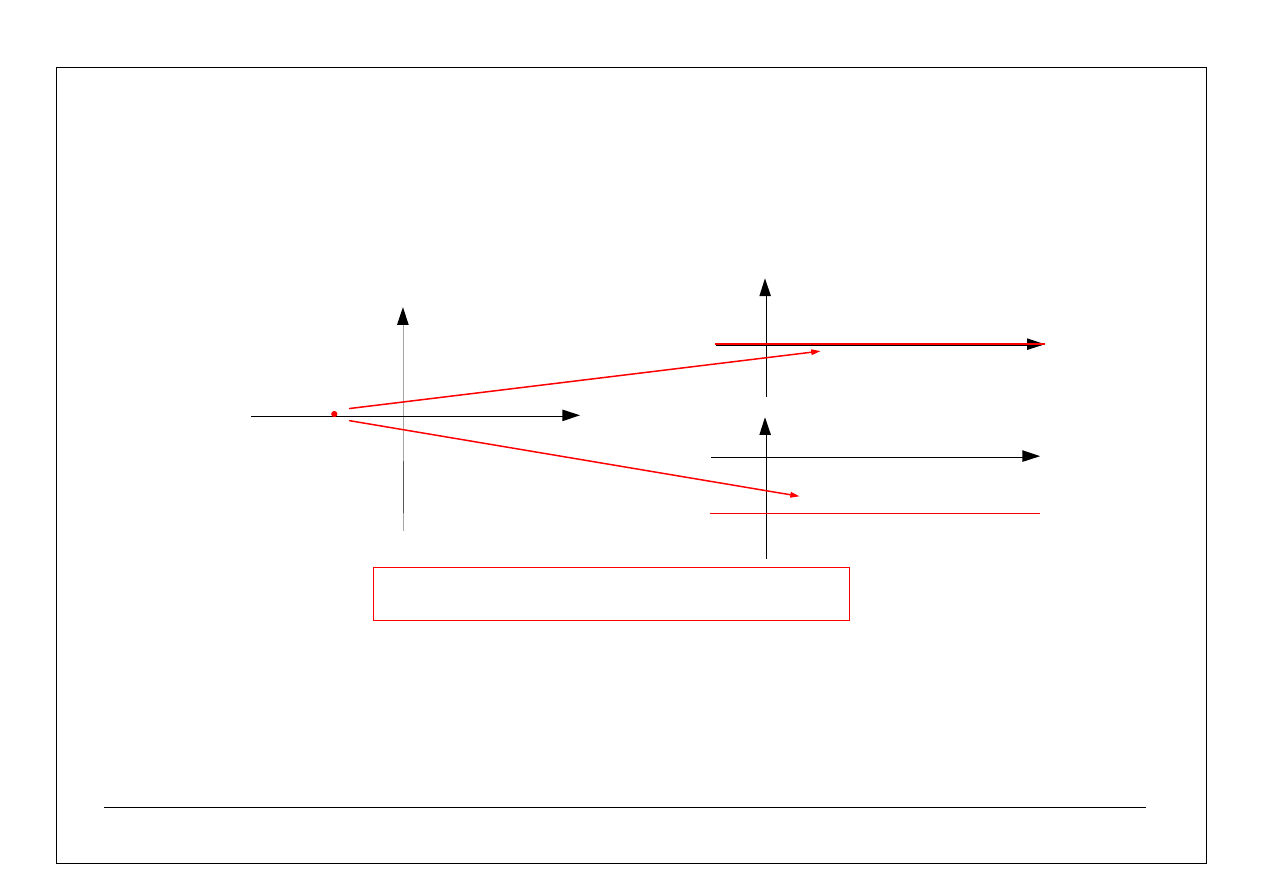
Dowód
)
(
)
(
)
(
1
0
0
s
M
s
M
s
G
k
k
k
n
n
s
j
arg
s
j
arg
j
M
arg
j
M
arg
j
G
arg
n
i
i
n
i
i
2
]
)
[(
)
(
)
(
)
(
1
1
0
1
0
0
i
s
j
arg
i
s
j
arg
s
i
j
ω
Im
jω-s
i
Re
s
i
jω
jω-s
i
Re
Im
9
stabilność układów ciągłych
)
(
0
j
G
Re
)
(
0
j
G
m
I
(-1,j0)
)
(
20log(1)=0
-180
0
)
(
L
)
(
1
)
(
1
1
A
e
j
10
stabilność układów ciągłych
-140
-120
-100
-80
-60
-40
-20
0
20
40
10
-2
10
-1
10
0
10
1
10
2
10
3
-270
-225
-180
-135
-90
-45
0
Bode Diagram
Frequency (rad/sec)
)
(
0
j
G
Re
)
(
0
j
G
m
I
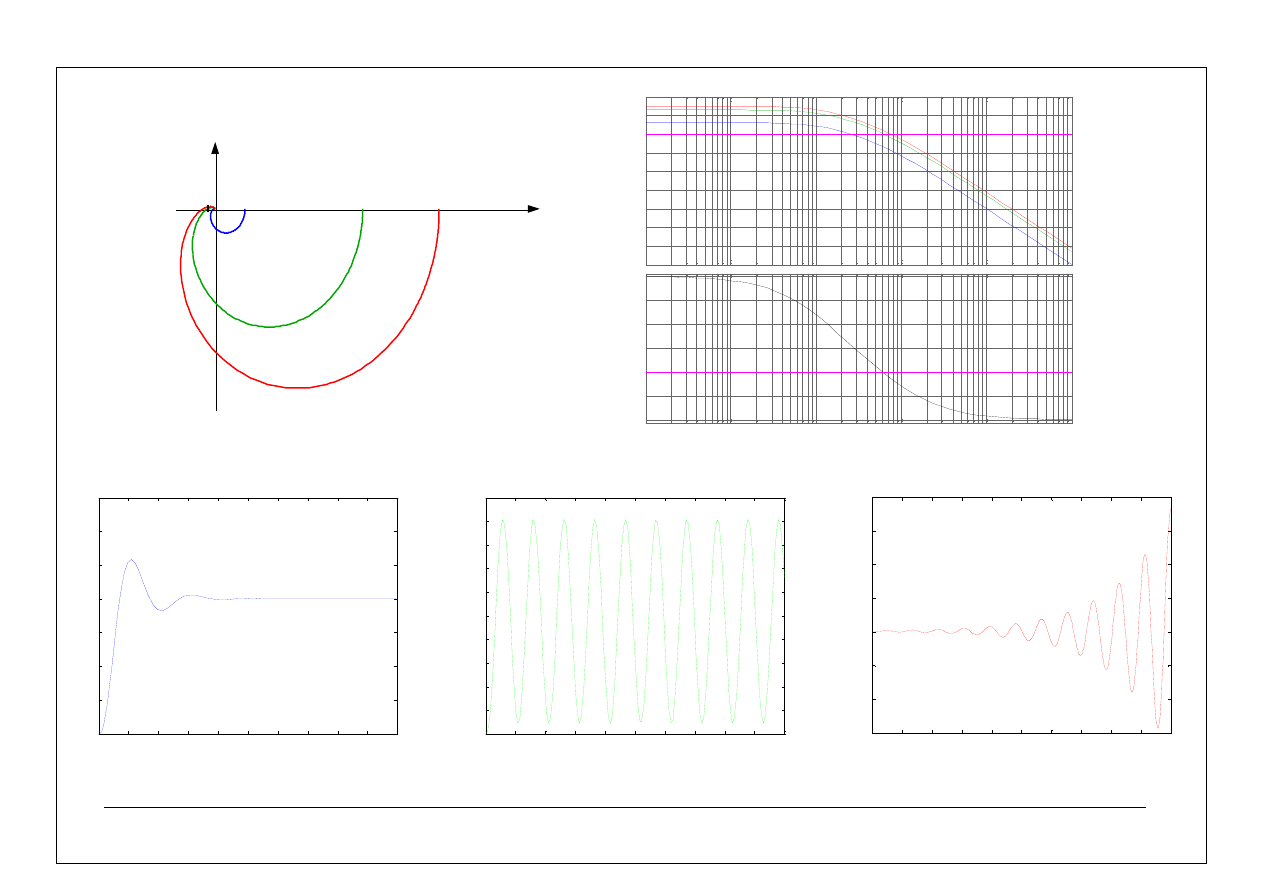
stabilny
na granicy
stabilności
niestabilny
0
1
2
3
4
5
6
7
8
9
10
-150
-100
-50
0
50
100
150
200
0
1
2
3
4
5
6
7
8
9
10
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
0
1
2
3
4
5
6
7
8
9
10
0
0.2
0.4
0.6
0.8
1
1.2
1.4
11
stabilność układów ciągłych
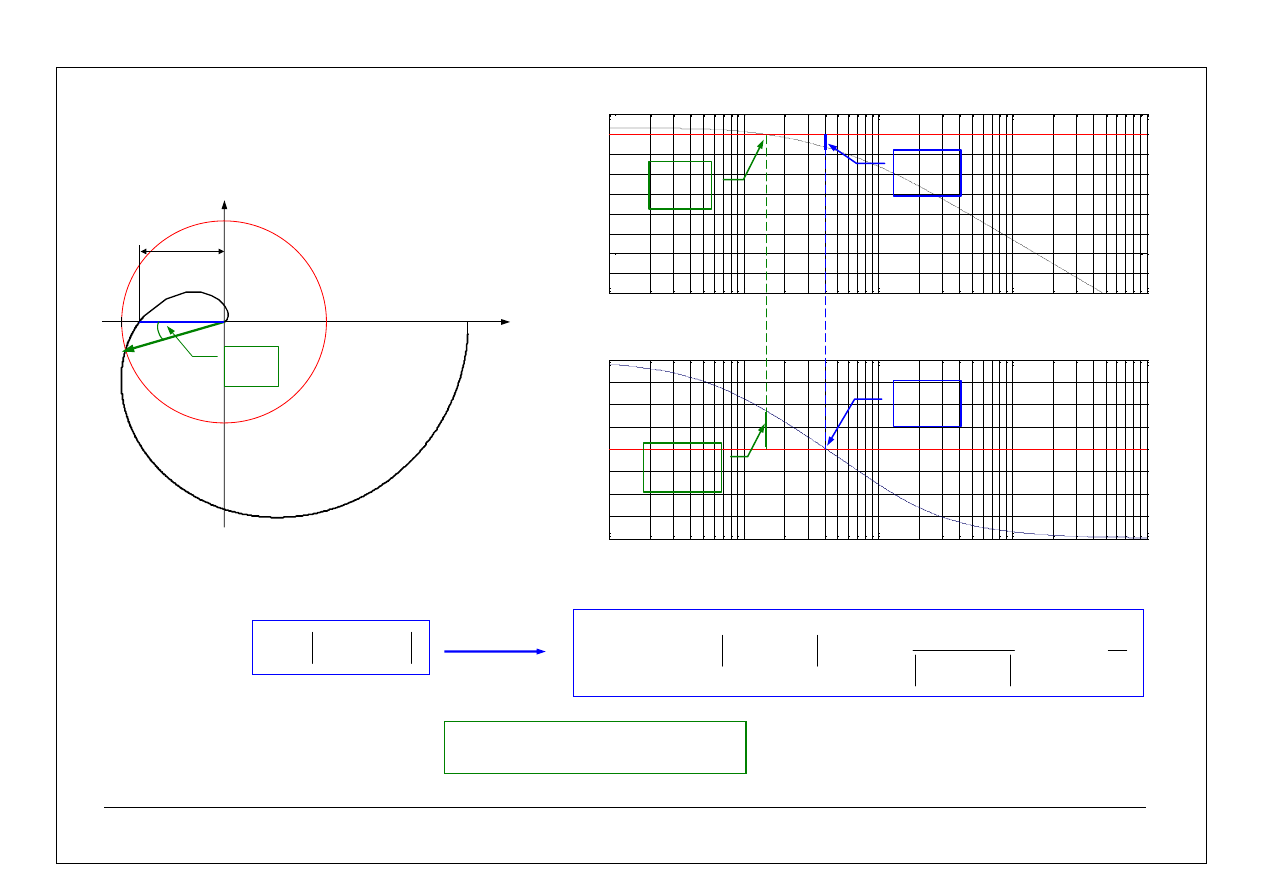
Re{G(jω)}
Im{G(jω)}
k
)
0
,
1
(
j
d
Δφ
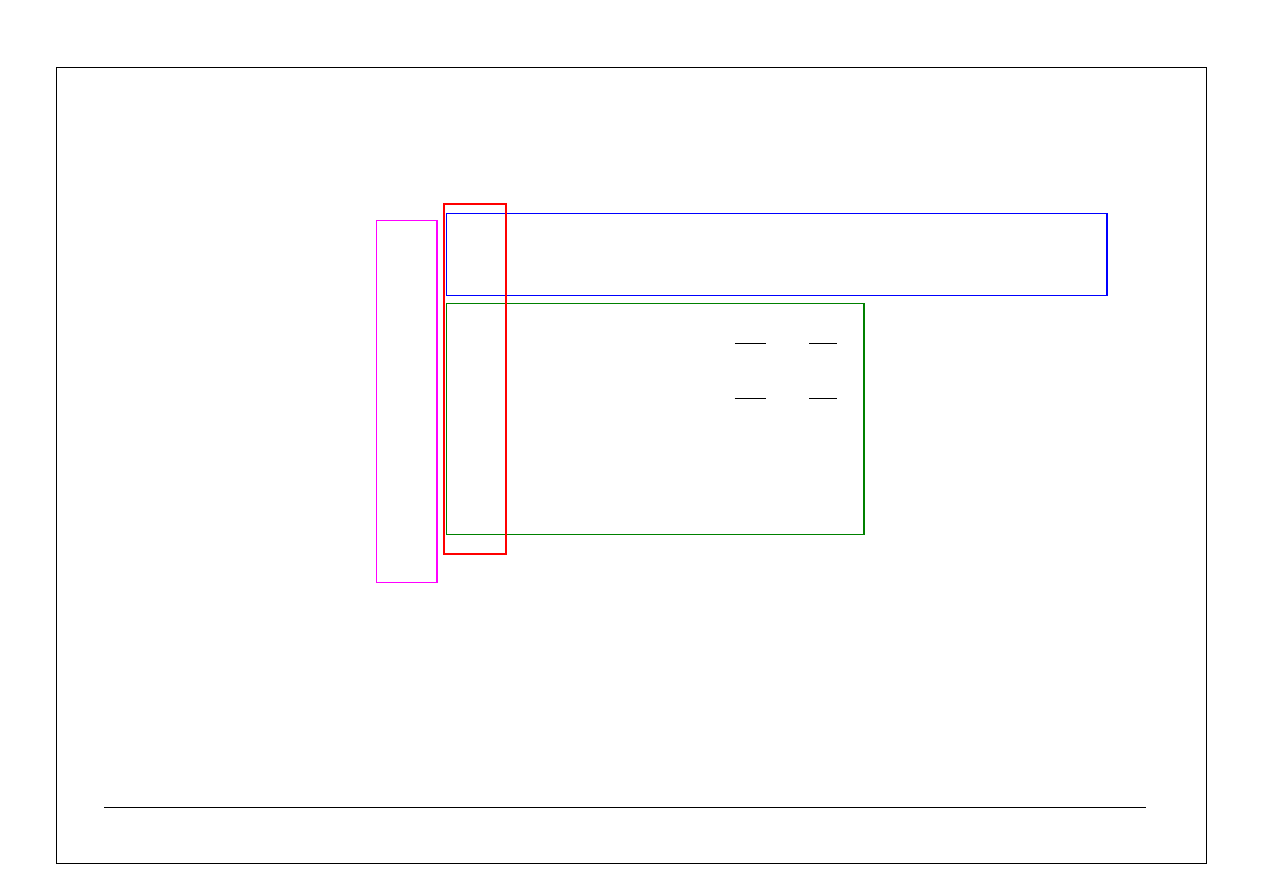
)
(
0
j
G
d
d
log
j
G
log
j
G
log
L
1
20
)
(
1
20
)
(
20
0
0
)]
(
[
180
1
0
0
j
G
arg
10
-2
10
-1
10
0
10
1
10
2
-160
-140
-120
-100
-80
-60
-40
-20
0
20
charakterystyka amplitudowo-czestotliwosciowa
10
-2
10
-1
10
0
10
1
10
2
-360
-315
-270
-225
-180
-135
-90
-45
0
charakterystyka amplitudowo-czestotliwosciowa
Δφ
ΔL
1
Wyszukiwarka
Podobne podstrony:
cw PAiTS 04 id 122323 Nieznany
cw PAiTS 07 id 122326 Nieznany
kolos automatyka cw PAiTS 03 id Nieznany
chemzp cw 05 id 113523 Nieznany
cw 05 opto 04 03 05 id 121377 Nieznany
NAI2006 05 id 313056 Nieznany
CW 8 pytania kontrolne id 12215 Nieznany
matma dyskretna 05 id 287941 Nieznany
cwiczenie 05 id 125057 Nieznany
Cw 29 szablon id 97632 Nieznany
cw PRI harmonogram id 122354 Nieznany
Cw 1 Czworniki bierne id 122391 Nieznany
lab pwsp 05 id 258618 Nieznany
cw 03 formularz id 121361 Nieznany
Zestaw 05 id 587909 Nieznany
Cw 25 Zaklocenia id 122416 Nieznany
cw 15 formularz id 121556 Nieznany
normy do cw I PN B 19301 id 787 Nieznany
więcej podobnych podstron