1
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny – linearyzacja
Równania otrzymane w procesie modelowania są
najczęściej równaniami
nieliniowymi
.
Ze względu na łatwość analizy dąży się do
zastąpienia
równań nieliniowych równaniami liniowymi.
Linearyzacja
jest procesem tworzenia modelu liniowego,
który aproksymuje model nieliniowy.
2
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny – linearyzacja
Liniowość i nieliniowość to właściwości systemu, które są
związane ze strukturą równań opisujących ten system.
Metody linearyzacji:
uproszczenia,
rozkład w szereg Taylora,
małych odchyleń od ruchu bazowego,
z zastosowaniem identyfikacji.
3
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny – linearyzacja
Założenia
to te warunki, które określają zakres ważności
modelu, a więc
zmniejszają zakres ogólności modelu
,
np.:
zwoje sprężyny nigdy nie są zblokowane (nigdy nie
stykają się),
kąt wychylenia wahadła w rozpatrywanym ośrodku nie
jest większy niż 7
o
.
4
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny – linearyzacja
Uproszczenia
to
te
warunki,
które
pogarszają
dokładność modelu
, przez to że zezwalają na pominięcie
w modelu fizycznym określonych zjawisk, o których
sądzimy że w danych konkretnych warunkach mało
wpływają na dokładność odwzorowania oryginału przez
jego model, np.:
do obliczeń przyjmuje się, że w sprężynie śrubowej
dominujące są naprężenia skręcające, zatem pomija
się naprężenia zginające, ścinające i ściskające i
pomija się w związku z tym odkształcenia wywołane
tymi naprężeniami,
pomijamy wydłużanie linki na której zawieszona jest
masa, pomijamy tarcie linki o uchwyt mocujący.
5
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny – linearyzacja
Uproszczenia wynikają z przyjętych założeń, a o ich
dopuszczalności decyduje żądana dokładność modelu.
W konkretnym przypadku założenia są spełnione
(prawdziwe) lub nie są, tymczasem uproszczenia są
prawomocne tylko w pewnym stopniu, i ich uchylenie
zawsze spowoduje poprawę wierności modelu. Natomiast
nie spełnienie założeń powoduje iż model w ogóle
przestaje być ważny.
6
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny – linearyzacja – uproszczenia
Metody linearyzacji: uproszczenia
d
2
dt
2
g
l
sin=0
Model nieliniowy:
Założenie:
7
o
Uproszczenie:
sin=
d
2
dt
2
g
l
⋅=
0
Model liniowy:
7
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny – linearyzacja – uproszczenia
¨ k
m
˙ g
l
sin=0
Model nieliniowy:
Model liniowy:
¨ k
m
˙ g
l
=
0
8
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny – linearyzacja – rozkład w szereg Taylora
Metody linearyzacji: rozkład w szereg Taylora
Dany jest pewien nieliniowy model systemu w postaci równań stanu i
równania wyjścia:
˙X =F X ,U
Dany jest pewien ustalony punkt pracy systemu:
F X
0,
U
0
=
0
Przyjmujemy, że: , oraz
X = X
0
X U =U
0
U
Wobec tego dla pierwszego równania możemy zapisać:
˙X =F X
0
X ,U
0
U
Y =G X ,U
G X
0,
U
0
=
G
0
Y =Y
0
Y
9
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny – linearyzacja – rozkład w szereg Taylora
˙
X =F X
0,
U
0
∂
F
∂
X
∣
X
0,
U
0
⋅
X
∂
F
∂
U
∣
X
0,
U
0
⋅
U R.
X = X
0
X
Różniczkujemy obustronnie równanie
otrzymamy:
˙X = ˙X
0
˙
X
Ponieważ:
˙X
0
=
F X
0,
U
0
=
0
to
˙X = ˙X
˙
X =
∂
F
∂
X
∣
X
0,
U
0
⋅
X
∂
F
∂
U
∣
X
0,
U
0
⋅
U
Rozkład w szereg Taylora:
10
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny – linearyzacja – rozkład w szereg Taylora
Ostatecznie:
˙
X =
∂
F
∂
X
∣
X
0,
U
0
⋅
X
∂
F
∂
U
∣
X
0,
U
0
⋅
U
˙
X =A⋅ X B⋅U
gdzie:
A=
∂
f
1
∂
x
1
∂
f
1
∂
x
n
∂
f
n
∂
x
1
∂
f
n
∂
x
n
∣
X
0,
U
0
B=
∂
f
1
∂
u
1
∂
f
1
∂
u
m
∂
f
n
∂
u
1
∂
f
n
∂
u
m
∣
X
0,
U
0
11
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Y
0
Y =G X
0,
U
0
∂
G
∂
X
∣
X
0,
U
0
⋅
X
∂
G
∂
U
∣
X
0,
U
0
⋅
U R.
Y =
∂
G
∂
X
∣
X
0,
U
0
⋅
X
∂
G
∂
U
∣
X
0,
U
0
⋅
U
Dla drugiego równania możemy zapisać:
Y
0
=
G X
0,
U
0
=
G
0
Y =Y
0
Y
Y =G X
0
X ,U
0
U
Rozkład w szereg Taylora:
Model dynamiczny – linearyzacja – rozkład w szereg Taylora
Y =G X
0
X ,U
0
U
12
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Y =
∂
G
∂
X
∣
X
0,
U
0
⋅
X
∂
G
∂
U
∣
X
0,
U
0
⋅
U
Ostatecznie:
Y =C⋅ X D⋅U
gdzie:
C=
∂
g
1
∂
x
1
∂
g
1
∂
x
n
∂
g
p
∂
x
1
∂
g
p
∂
x
n
∣
X
0,
U
0
D=
∂
g
1
∂
u
1
∂
g
1
∂
u
m
∂
g
p
∂
u
1
∂
g
p
∂
u
m
∣
X
0,
U
0
Model dynamiczny – linearyzacja – rozkład w szereg Taylora
13
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Ostatecznie uzyskaliśmy liniowy model przyrostowy, który
odpowiada modelowi nieliniowemu tylko w bliskim
otoczeniu ustalonego punktu pracy.
Y =C⋅ X D⋅U
˙
X =A⋅ X B⋅U
Model dynamiczny – linearyzacja – rozkład w szereg Taylora
14
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
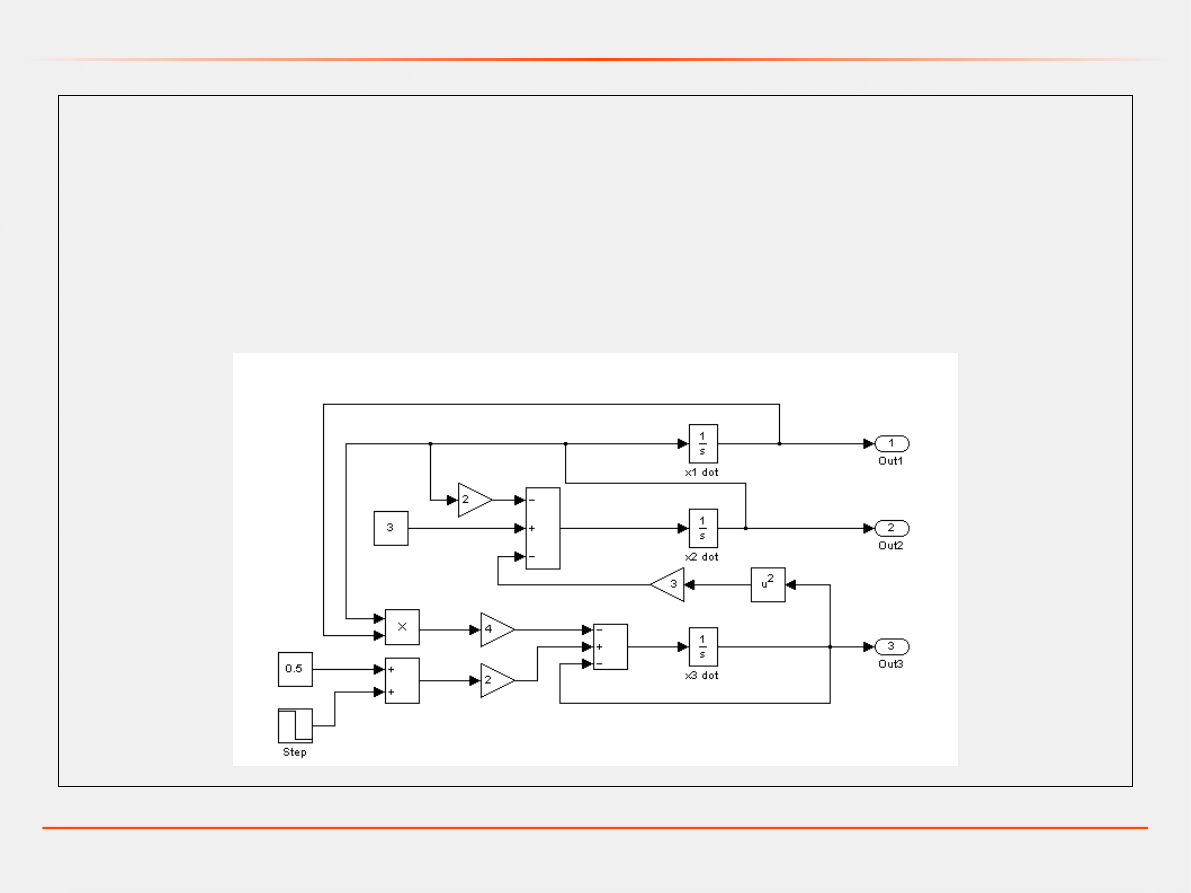
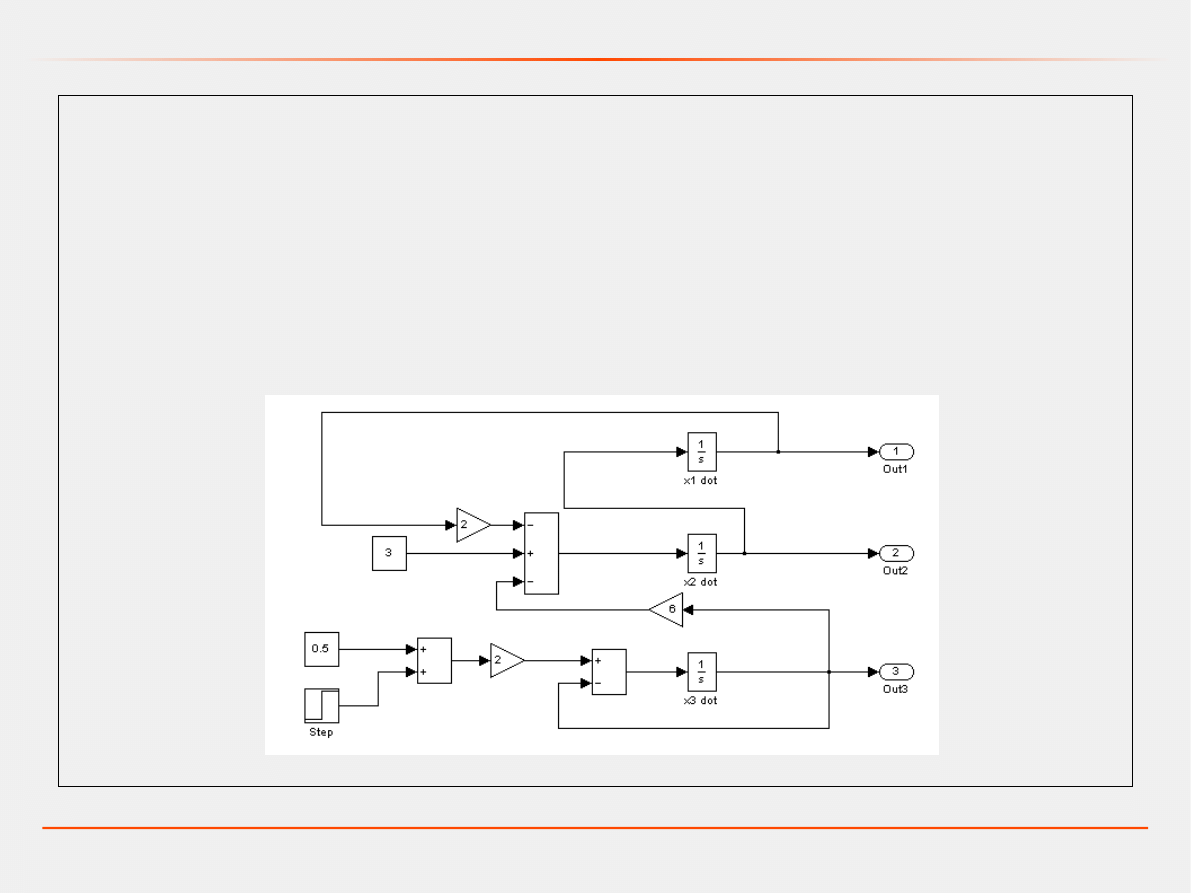
Przykład.
{
˙x
1
=
x
2
˙x
2
=−
2 x
1
−
3 x
3
2
u
1
˙x
3
=−
4 x
1
x
2
−
x
3
2 u
2
Model dynamiczny – linearyzacja – rozkład w szereg Taylora
Dany jest pewien ustalony punkt pracy systemu:
˙x
10
= ˙x
20
= ˙x
30
=
0, u
10
=
3, u
20
=
0.5
Pozostałe parametry punktu pracy znajdziemy wstawiając podane
warunki do równań, otrzymamy
x
10
=
0, x
20
=
0, x
30
=
1
{
˙x
1
=
f
1
x
1,
x
2,
x
3,
u
1,
u
2
˙x
2
=
f
2
x
1,
x
2,
x
3,
u
1,
u
2
˙x
3
=
f
3
x
1,
x
2,
x
3,
u
1,
u
2
15
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny – linearyzacja – rozkład w szereg Taylora
A=
0
1
0
−
2
0 −6 x
3
−
4 x
2
−
4 x
1
−
1
∣
X
0,
U
0
=
0 1
0
−
2 0 −6
0 0 −1
B=
0 0
1 0
0 2
˙
X =A⋅ X B⋅U
A=
∂
f
1
∂
x
1
∂
f
1
∂
x
2
∂
f
1
∂
x
3
∂
f
2
∂
x
1
∂
f
2
∂
x
2
∂
f
2
∂
x
3
∂
f
3
∂
x
1
∂
f
3
∂
x
2
∂
f
3
∂
x
3
∣
X
0,
U
0
B=
∂
f
1
∂
u
1
∂
f
1
∂
u
2
∂
f
2
∂
u
1
∂
f
2
∂
u
2
∂
f
3
∂
u
1
∂
f
3
∂
u
2
∣
X
0,
U
0
16
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny – linearyzacja – rozkład w szereg Taylora
{
˙x
1
=
x
2
˙x
2
=−
2 x
1
−
3 x
3
2
u
1
˙x
3
=−
4 x
1
x
2
−
x
3
2 u
2
Model nieliniowy:
17
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny – linearyzacja – rozkład w szereg Taylora
Model liniowy:
˙
X =A⋅ X B⋅U
A=
0 1
0
−
2 0 −6
0 0 −1
B=
0 0
1 0
0 2
18
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny – linearyzacja – zastosowanie identyfikacji
Metody linearyzacji: zastosowanie identyfikacji
Rozpatrujemy liniowy układ dynamiczny opisany
równaniem:
Zmienne i w każdym momencie można zmierzyć.
Na podstawie wyników obserwacji należy określić
niewiadome parametry macierzy A oraz macierzy B
X
U
U
X
˙X =A⋅X B⋅U
X ∈ R
n
U ∈ R
m
A
nxn
B
nxm
19
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny – linearyzacja – zastosowanie identyfikacji
Dokonujemy S pomiarów.
Dla każdego pomiaru o numerze j otrzymamy:
˙
X
j
=
AX
j
BU
j
∀
j 1, s
X
j
=
X t
j
U
j
=
U t
j
˙
X
j
=
˙x
1j
˙x
2j
⋮
˙x
nj
X
j
=
x
1j
x
2j
⋮
x
nj
U
j
=
u
1j
u
2j
⋮
u
mj
20
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny – linearyzacja – zastosowanie identyfikacji
Zbierając razem wszystkie pomiary możemy zapisać:
Ze względu na niedoskonałość pomiarów oraz inne
czynniki układ jest sprzeczny, nie ma rozwiązania.
Można jednak mówić o istnieniu pseudorozwiązania i .
A
{
˙
X
1
=
AX
1
BU
1
˙
X
2
=
AX
2
BU
2
⋮
˙
X
S
=
AX
S
BU
S
B
21
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny – linearyzacja – zastosowanie identyfikacji
Podstawienie pseudorozwiąznia daje odpowiednie
odchyłki:
Obierzmy funkcję celu w postaci:
J =
∑
j=1
S
∥∥
2
{
1
= ˙
X
1
−
A X
1
−
B U
1
2
= ˙
X
2
−
A X
2
−
B U
2
⋮
S
= ˙
X
S
−
A X
S
−
B U
S
J =
∑
j=1
S
˙
X
j
−
A X
j
−
B U
j
T
⋅
˙
X
j
−
A X
j
−
B U
j
22
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny – linearyzacja – zastosowanie identyfikacji
Poszukiwane rozwiązanie zadania identyfikacji parametrów
musi spełniać warunek:
J =∥∥
2
min
Warunek optimum:
∂
J
∂
A
=
0 ;
∂
J
∂
B
=
0
23
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny – linearyzacja – zastosowanie identyfikacji
Pochodna skalara J po macierzowym argumencie jest
macierzą:
∂
J
∂
A
=
∂
J
∂
a
11
⋯
∂
J
∂
a
1n
⋮
⋮
⋮
∂
J
∂
a
n1
⋯
∂
J
∂
a
nn
;
∂
J
∂
B
=
∂
J
∂
b
11
⋯
∂
J
∂
b
1m
⋮
⋮
⋮
∂
J
∂
b
n1
⋯
∂
J
∂
b
nm
24
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny – linearyzacja – zastosowanie identyfikacji
Normalne równanie metody najmniejszych kwadratów
przyjmie postać:
{
∑
j=1
S
˙
X
j
−
A X
j
−
B U
j
⋅
X
j
T
=
0
∂
J
∂
A
=
0
∑
j=1
S
˙
X
j
−
A X
j
−
B U
j
⋅
U
j
T
=
0
∂
J
∂
B
=
0
25
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny – linearyzacja – zastosowanie identyfikacji
Podstawiając:
{
∑
j=1
S
˙
X
j
−
A∣ B
⋅
Z
j
⋅
X
j
T
=
0
∑
j=1
S
˙
X
j
−
A∣ B
⋅
Z
j
⋅
U
j
T
=
0
otrzymamy:
Z
j
=
X
j
U
j
co w postaci jednego równania przyjmie postać:
∑
j=1
S
˙
X
j
−
A∣ B
⋅
Z
j
⋅
Z
j
T
=
0
26
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny – linearyzacja – zastosowanie identyfikacji
Po przekształceniach otrzymamy:
podstawiając:
otrzymamy:
∑
j=1
S
˙
X
j
⋅
Z
j
T
−
A∣ B
∑
j=1
S
Z
j
⋅
Z
j
T
=
0
R
S
=
∑
j=1
S
˙
X
j
⋅
Z
j
T
P
S
=
∑
j=1
S
Z
j
⋅
Z
j
T
C =
A∣ B
R
S
=
C⋅P
S
C =R
S
⋅
P
S
−
1
dim R
S
=
n×nm
dim P
S
=
nm×nm
dim C=n×nm
Z
j
=
X
j
U
j
27
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny – linearyzacja – zastosowanie identyfikacji
otrzymamy:
R
S
= ˙
X
∗
⋅
Z
∗
T
C =
A∣ B
R
S
=
C⋅P
S
C =R
S
⋅
P
S
−
1
Z
j
=
X
j
U
j
˙
X
∗
=
˙
X
1
˙
X
2
˙
X
s
oznaczając:
Z
∗
=
Z
1
Z
2
Z
s
P
S
=
Z
∗
⋅
Z
∗
T
28
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
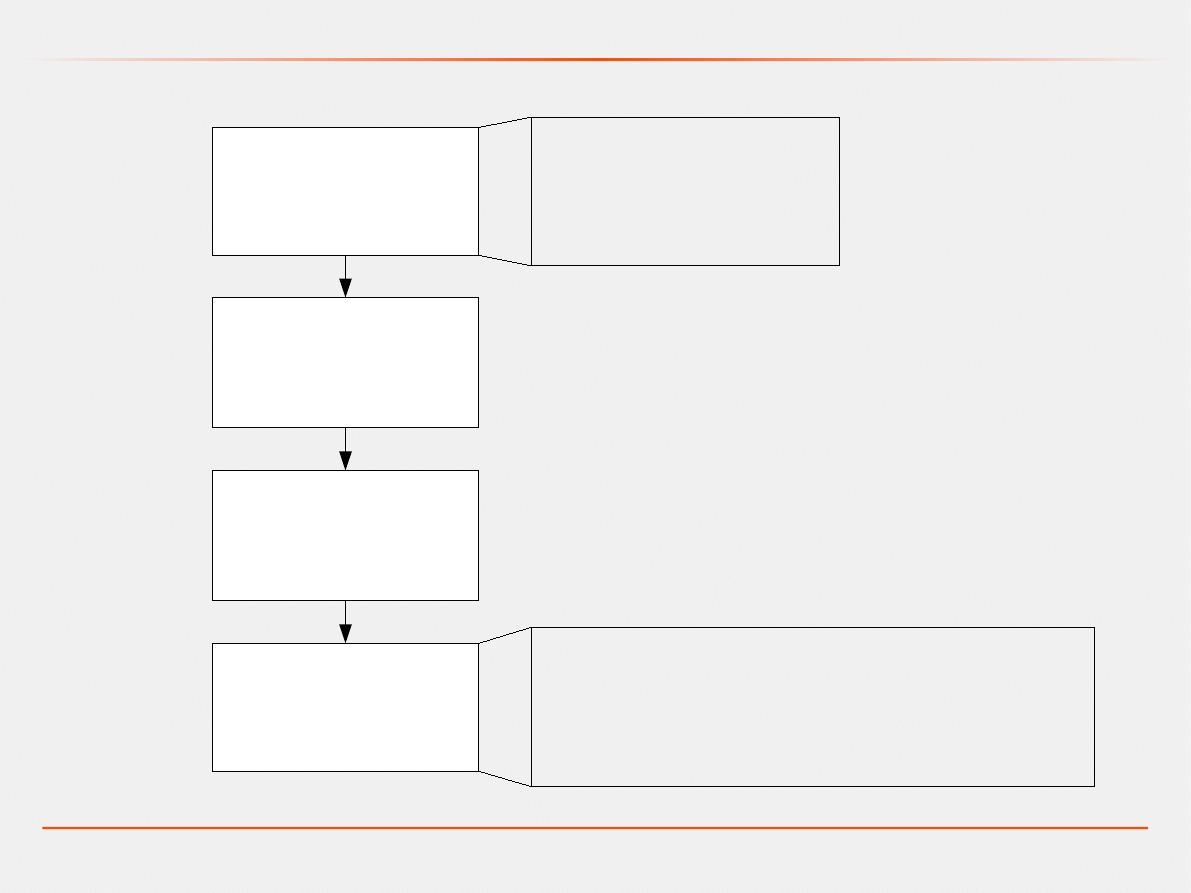
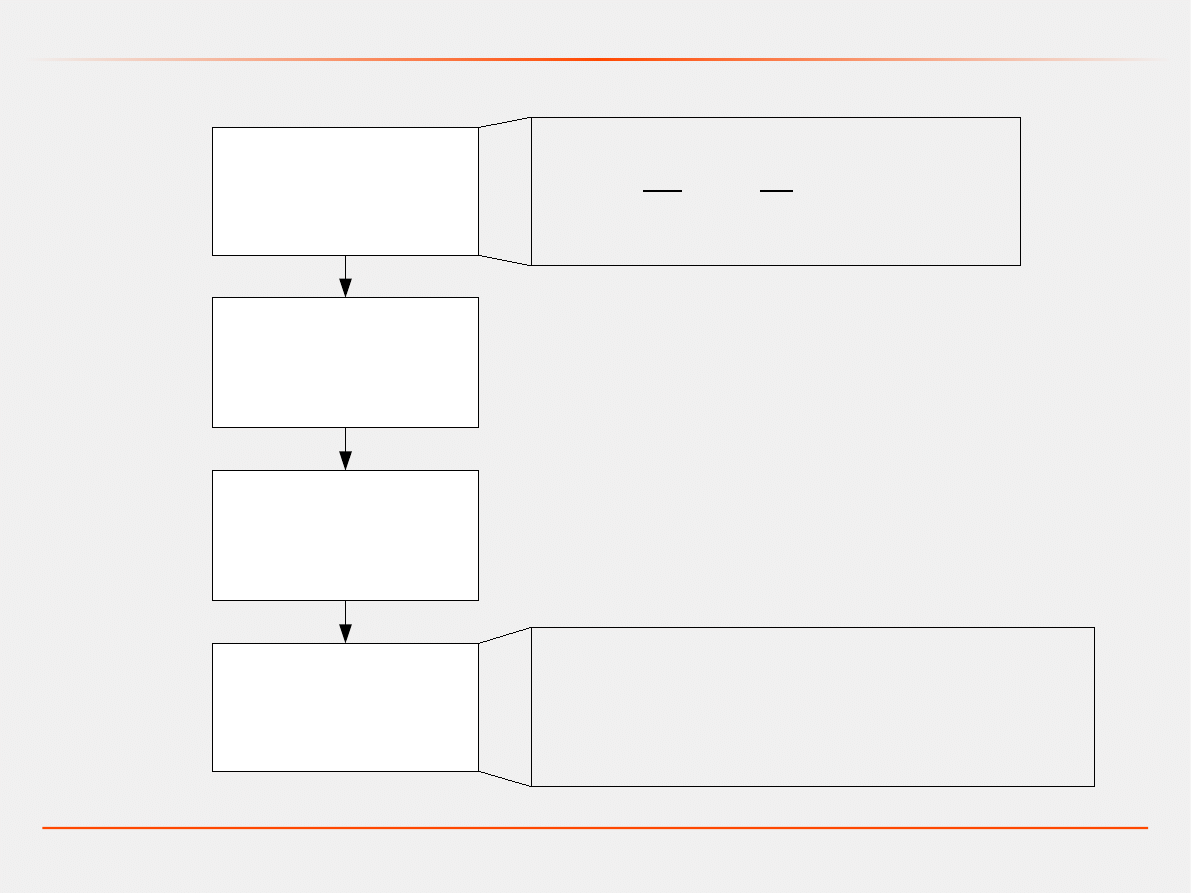
Model dynamiczny – linearyzacja – zastosowanie identyfikacji
Model nieliniowy
lub
Obiekt rzeczywisty
Identyfikacja
Model liniowy
Zebranie danych
pomiarowych
˙X =A⋅X B⋅U
˙X =F X ,U
Y =G X ,U
X ∈ R
n
U ∈ R
m
A
nxn
B
nxm
29
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
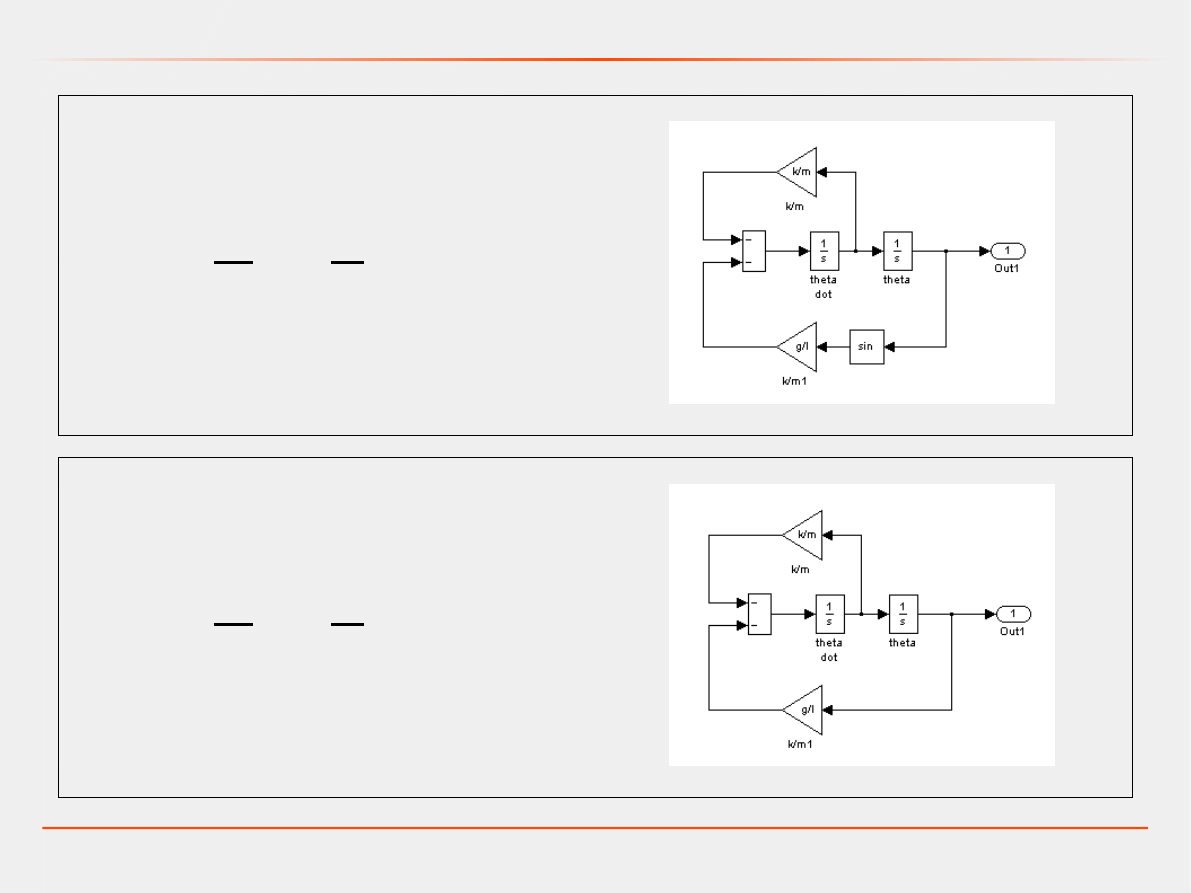
Model dynamiczny – linearyzacja – zastosowanie identyfikacji
Model nieliniowy
lub
Obiekt rzeczywisty
Identyfikacja
Model liniowy
Zebranie danych
pomiarowych
˙X =A⋅X
X ∈ R
2
A
2x2
¨ k
m
˙ g
l
sin=0
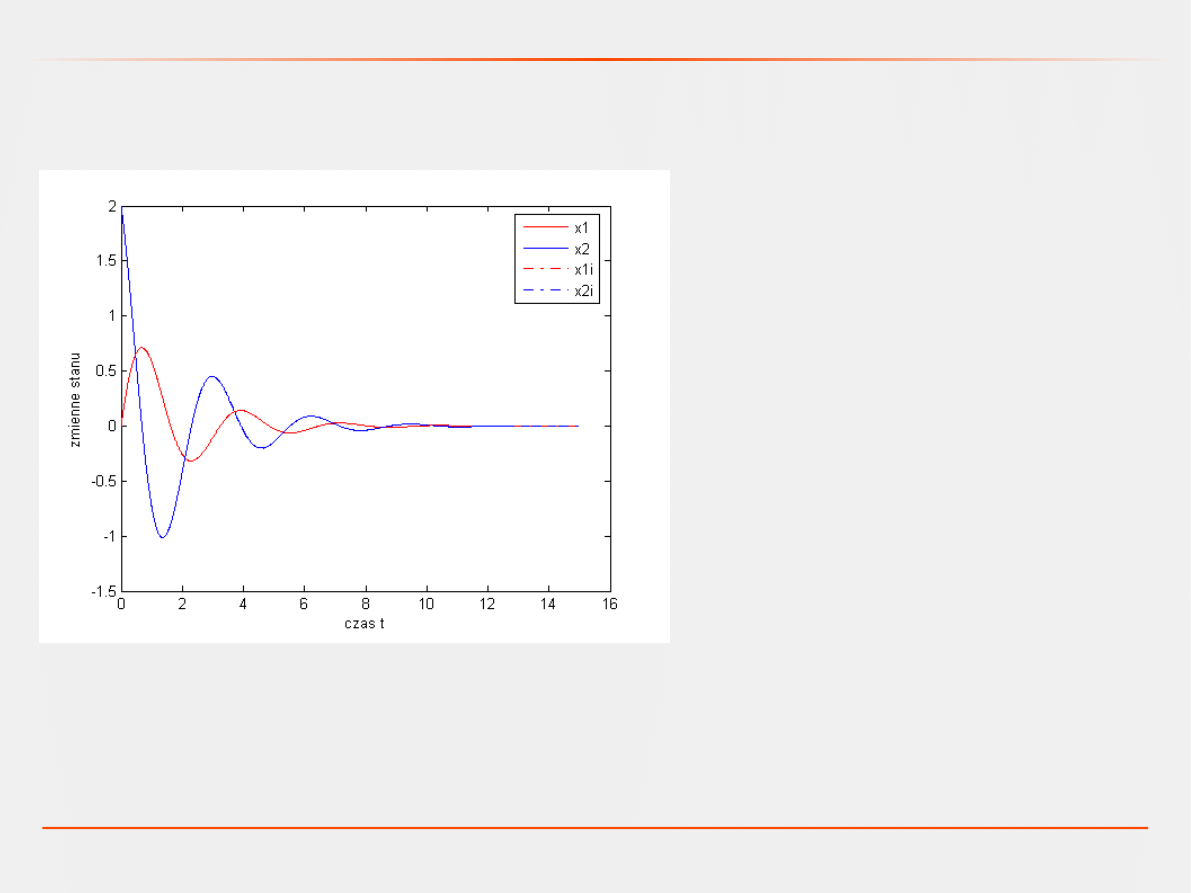
30
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny – linearyzacja – zastosowanie identyfikacji
x
10
=
0 x
20
=
2
tp=0.001
S =15000
A=
0.004
1.001
−
4.004 −0.997
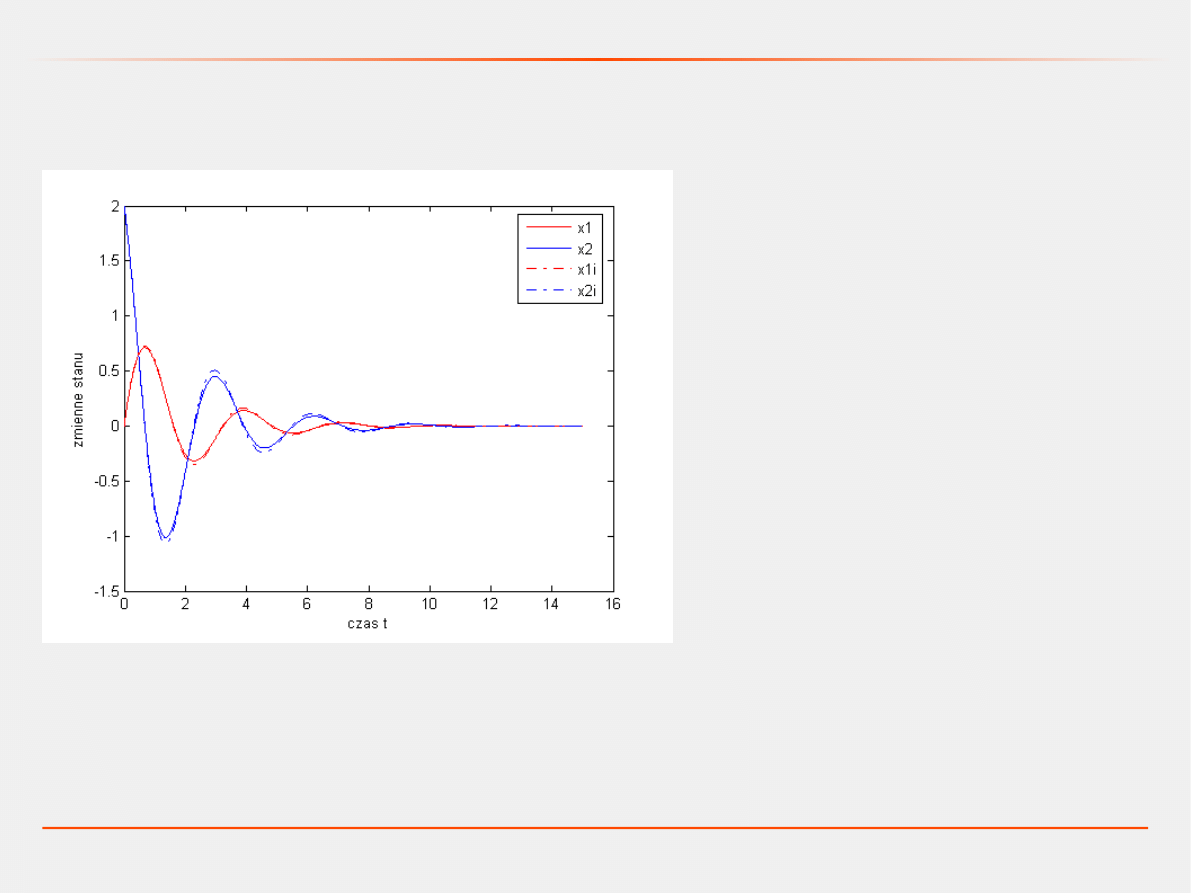
31
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny – linearyzacja – zastosowanie identyfikacji
x
10
=
0 x
20
=
2
tp=0.01
S =1500
A=
0.0402
1.0097
−
4.0394 −0.9702
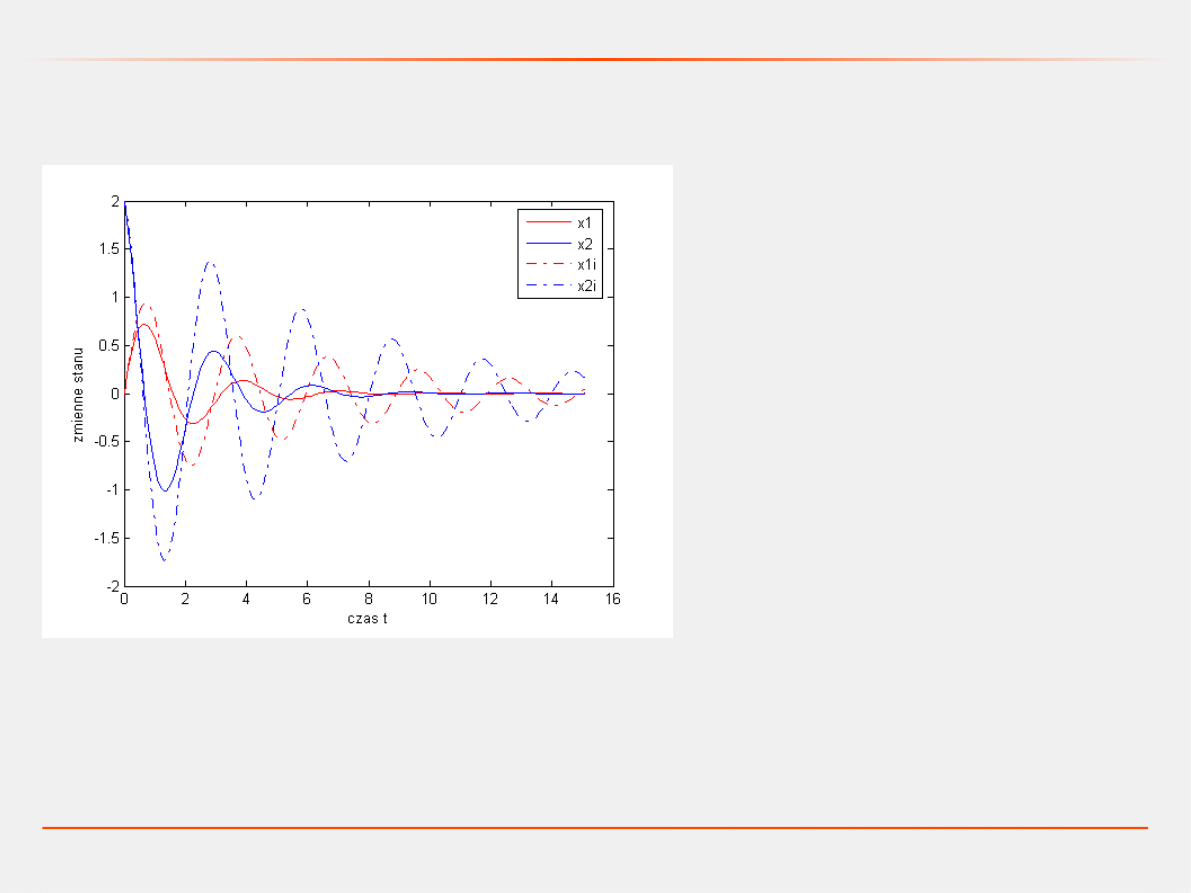
32
MODELOWANIE I SYMULACJA
Szczecin - 5.01.2009
Model dynamiczny – linearyzacja – zastosowanie identyfikacji
x
10
=
0 x
20
=
2
tp=0.1
S =150
A=
0.4235
1.0675
−
4.3424 −0.7180
Wyszukiwarka
Podobne podstrony:
MIS wyklad 6
MIS wyklad 1
MIS wyklad 2
MIS wyklad 9
MiS wykład5 6
MIS wyklad 8
MIS wyklad 5
MIS wyklad 3
MIS wyklad 4
Napęd Elektryczny wykład
wykład5
Psychologia wykład 1 Stres i radzenie sobie z nim zjazd B
Wykład 04
geriatria p pokarmowy wyklad materialy
ostre stany w alergologii wyklad 2003
WYKŁAD VII
Wykład 1, WPŁYW ŻYWIENIA NA ZDROWIE W RÓŻNYCH ETAPACH ŻYCIA CZŁOWIEKA
więcej podobnych podstron