(4) -
1 -
PODSTAWY AUTOMATYKI
Laboratorium
Ćw. 4. Metody strojenia regulatora PID
Celem ćwiczenia jest analiza własności układu regulacji oraz wskazanie możliwości
poprawy jego działania poprzez dobór nastaw odpowiednich regulatorów. Analizowane są
różne metody strojenia regulatorów typu PID. Badany jest wpływ nastaw regulatora na
jakość regulacji dobieranych według: metody Zieglera-Nicholsa (Z-N), metody QDR,
metody linii pierwiastkowych.
PRZEBIEG ĆWICZENIA
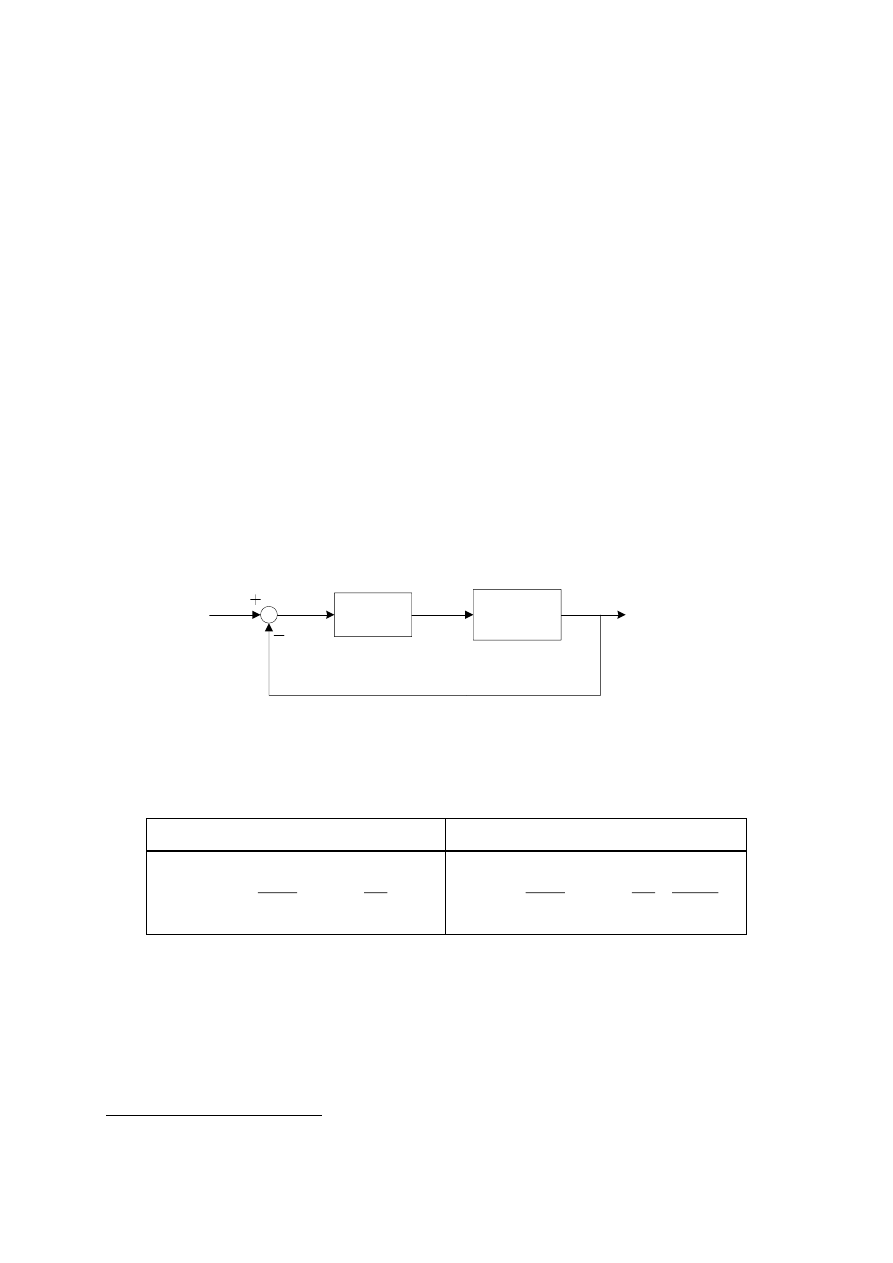
Analiza układu regulacji z rys. 1 przeprowadzona zostanie z regulatorem typu PID
oraz liniowym modelem obiektu K(s). Dla układu regulacji z rys.1 wyznacz zbiór
wskaźników
1
pozwalających ocenić właściwości oraz jakość regulacji.
K
r
(s)
w(t)
e(t)
u(t)
K(s)
y(t)
Rys 1. Układ regulacji dla liniowego modelu obiektu K(s)
W trakcie ćwiczeń laboratoryjnych analizowany będzie regulator PI lub PID dany
transmitancją K
r
(s):
Regulator PI
Regulator PID („rzeczywisty")
1
1
r
r
I
U s
K
s
k
E s
T s
1
1
1
D
r
r
I
d
U s
T s
K
s
k
E s
T s
T s
gdzie:
k
r
- wzmocnienie regulatora
T
I
- stała całkowania
T
D
- stała różniczkowania
T
d
- stała czasowa inercji występującej w członie różniczkującym regulatora,
(rzeczywisty element różniczkujący)
2
- T
d
(0,01
0,05)T
D
.
1
Patrz DODATEK „B"
2
konkretny przypadek, wartości/metody określa prowadzący ćwiczenie
(4) -
2 -
Wartości nastaw regulatora typu PID należy dobrać korzystając z następujących metod
i kryteriów
3
:
1. metody QDR
4
(analiza odpowiedzi skokowej obiektu);
2. metody Zieglera-Nicholsa (z wyznaczaniem wzmocnienia krytycznego);
3. kryterium minimum kwadratu uchybu oraz kryterium braku przeregulowań;
4. metody linii pierwiastkowych oraz narzędzia SISOTool
5
. Korzystając z metody
skreślania zer i biegunów
6
nastroić regulator PID tak aby układ
2
:
a) spełniał wymagania odnośnie stopnia stabilności i oscylacyjności,
b) możliwa była regulacja bez przeregulowania z minimalnym czasem regulacji t
r
5. Analiza odpowiedzi układu zamkniętego na wymuszenie sinusoidalne.
Przeprowadź analizę odpowiedzi układu zamkniętego, z regulatorem PID, o nastawach
dobranych według kryterium QDR, na wymuszenie
sin
w t
t
. Wykreśl
charakterystykę nadążania:
(
)
)
1
(
)
(
o
o
M
K
j
K
j
gdzie
( )
( ) ( )
r
o
K s
K s K s
Z charakterystyki nadążania
M
odczytaj trzy wartości częstotliwości z pasm:
1
– nadążania,
2
– rezonansowego,
3
– nadrezonansowego.
Wykreśl odpowiedzi (w stanie ustalonym) układu zamkniętego na wymuszenie
7
:
1
2
3
,
,
sin
w t
t
. W stanie ustalonym, porównaj stosunek amplitud sygnału
wyjściowego y(t) do wejściowego w(t) z wartością wskaźnika nadążania
i
M
.
OPRACOWANIE WYNIKÓW
1. Przedstawić wartości nastaw regulatora PID dla każdego z kryteriów.
2. Opracować i przedstawić przebiegi czasowe oraz charakterystyki pozwalające ocenić
zmianę poszczególnych wskaźników jakości w zależności od wartości nastaw regulatora.
Zaprezentować:
a) odpowiedzi skokowe układu zamkniętego (y(t) i u(t)),
b) wskaźnik nadążania
)
(
M
i wskaźnik regulacji
)
(
q
.
3. Przeanalizować i porównać (także w postaci tabelarycznej) wielkości uzyskanych
wskaźników jakości regulacji
8
dla układu z regulatorem PID, dla którego wartości nastaw
dobrano według różnych kryteriów. Określić:
c) stopień stabilności
oraz stopień oscylacyjności µ,
d) zapas fazy
oraz zapas amplitudy
k
,
e) wartość uchybu w stanie ustalonym, wartość przeregulowania, czas regulacji,
3
Patrz DODATEK „A"
4
Należy wykorzystać wyniki z poprzednich ćwiczeń
5
wywołanie z linii poleceń Matlaba: sisotool(K), gdzie K – transmitancja modelu obiektu
6
Patrz DODATEK „C"
7
Uwzględnij częstotliwość rezonansową (
2
rez
)
8
Patrz DODATEK „B"

(4) -
3 -
f) wartość całkowego wskaźnika jakości:
2
0
ust
I
e t
e
dt
.
4. Wybrać, spośród wyznaczonych nastaw, optymalne wartości nastaw regulatora PID
zapewniające najlepszą jakość regulacji w oparciu o analizowane wskaźniki jakości.
Wybór uzasadnić.
POLECENIA MATLABA
ltiview(); plot(); nyquist(); bode(); bodemag() ;rlocus() ;pzmap() ;sisotool()
Wyszukiwarka
Podobne podstrony:
cwiczenie9 id 125928 Nieznany
cwiczenia23 id 124959 Nieznany
cwiczenia 4 2 id 124428 Nieznany
Fizjologia Cwiczenia 3 id 17436 Nieznany
cwiczenie 9 id 125104 Nieznany
Cwiczenia 5 id 124444 Nieznany
opis cwiczenia id 336864 Nieznany
cwiczenie 5 id 101060 Nieznany
Cwiczenie 3 id 125305 Nieznany
CWICZENIE 6 2 id 99618 Nieznany
cwiczenie 5 id 125447 Nieznany
Cwiczenie 6 id 125101 Nieznany
cwiczenia2 4 id 124943 Nieznany
cwiczenie 2 id 125220 Nieznany
cwiczenie 3 1 id 125314 Nieznany
kielbasy cwiczenia id 234529 Nieznany
cwiczenie 1 i 2 id 125124 Nieznany
cwiczenie 5 2 id 101056 Nieznany
więcej podobnych podstron