Politechnika Poznańska Wydział Maszyn Roboczych i Transportu
Instytut Maszyn Roboczych i Pojazdów Samochodowych
Wykład 19
Systemy inteligentnej nawigacji
dr inż. Michał Maciejewski
michal.maciejewski@put.poznan.pl
Systemy informacyjno-informatyczne
w transporcie
2
Plan wykładu
• Tradycyjna nawigacja
• Dynamiczna nawigacja
• Inteligentna nawigacja
• Przyszłość systemów nawigacji
Tradycyjna nawigacja
• Nawigacja satelitarna
– rodzaj radionawigacji
– wykorzystanie fal radiowych emitowanych przez
sztuczne satelity
– GPS (najpopularniejszy)
3

Tradycyjna nawigacja
• Pozycjonowanie
– odbiornik GPS
– samodzielne lub komunikujące się (bez-)przewodowo
– dokładna pozycja + informacje o prędkości i kierunku
4
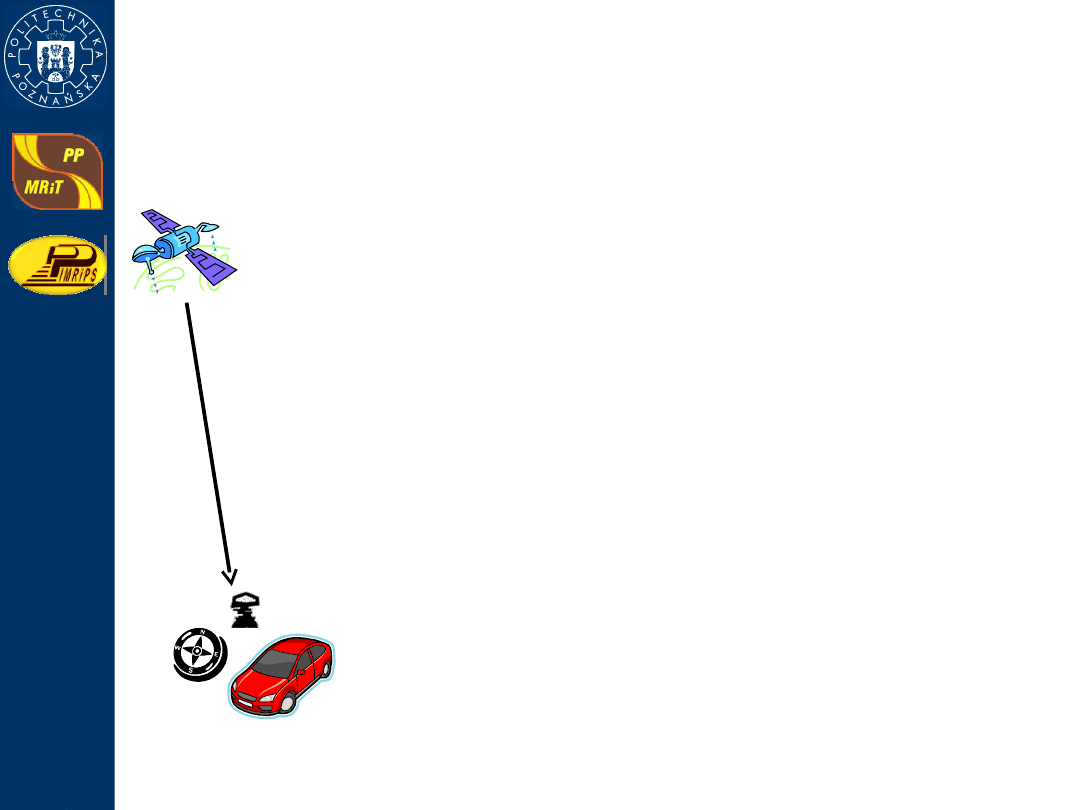
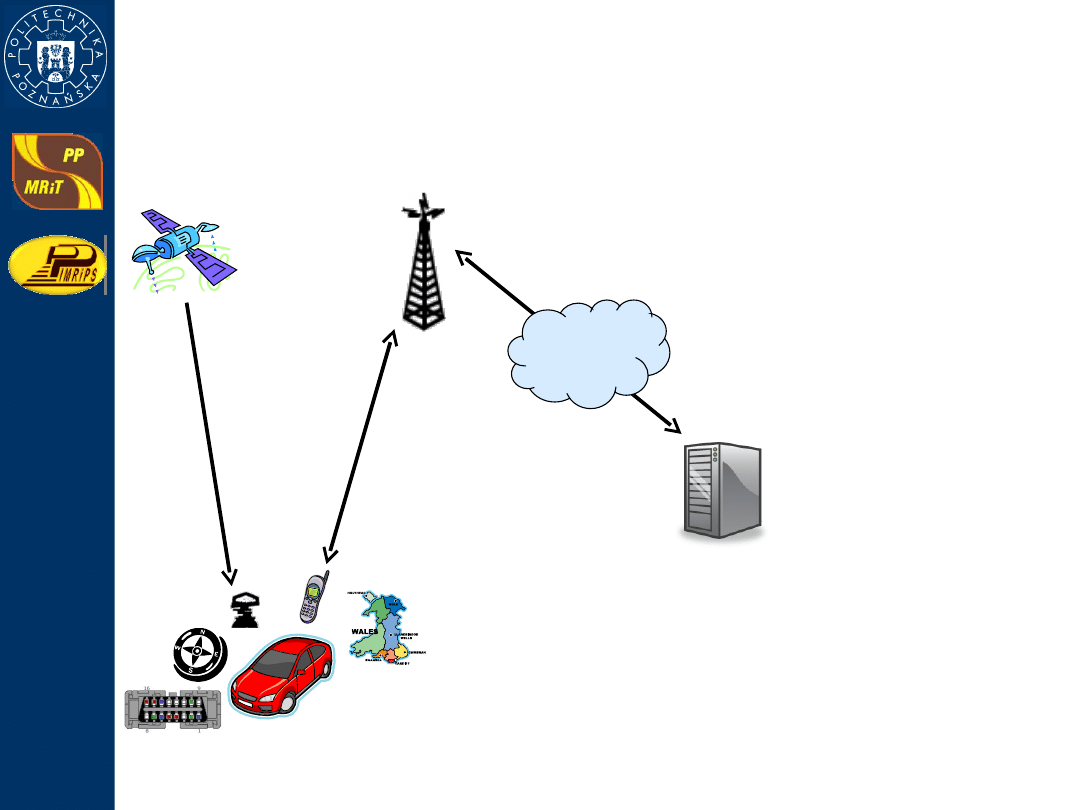
Architektura systemu
5
GPS
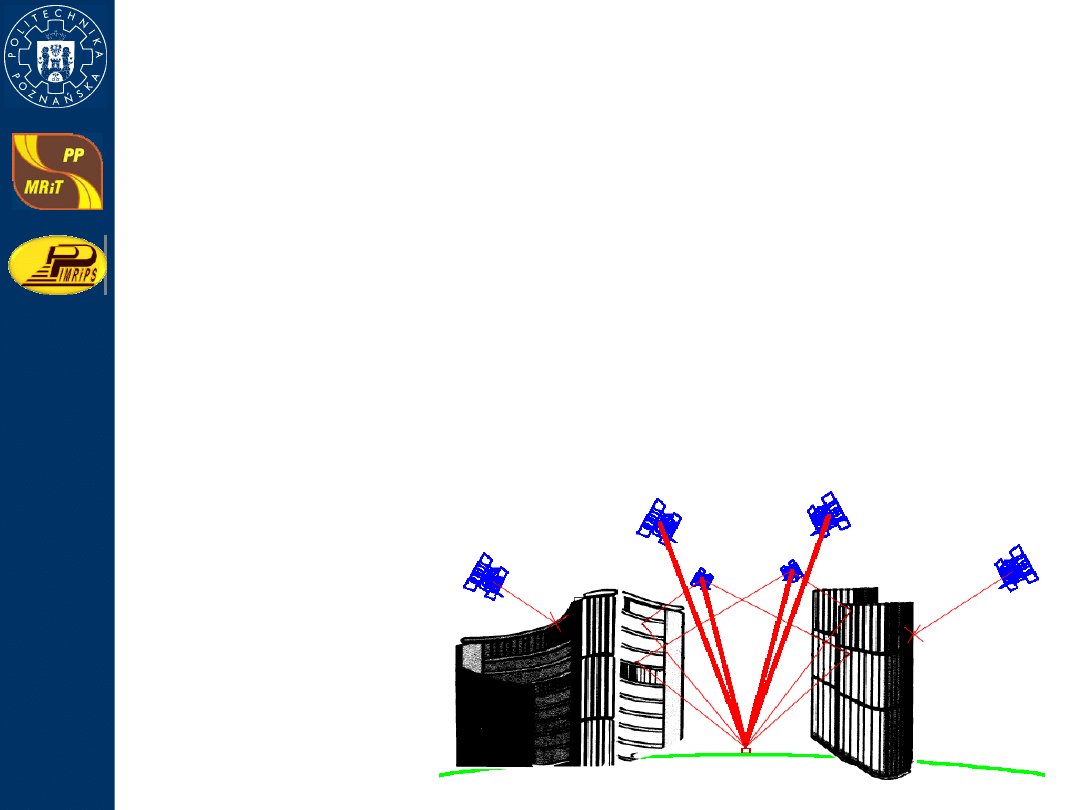
Tradycyjna nawigacja
• Pozycjonowanie – niedokładności
– tunele
• brak sygnału GPS
– miasto
• wąski kąt widzenia
• często niemożliwe wyznaczenie pozycji (mniej niż 4
satelity)
• zakłócające sygnały odbite
• zakłócenia GSM, WiFi, …
6

Tradycyjna nawigacja
• Korekty wyznaczania pozycji
– kompas elektroniczny
– elektroniczny licznik przebytej drogi
– (żyroskopowe) czujniki ruchu
7
Architektura systemu
8
GPS
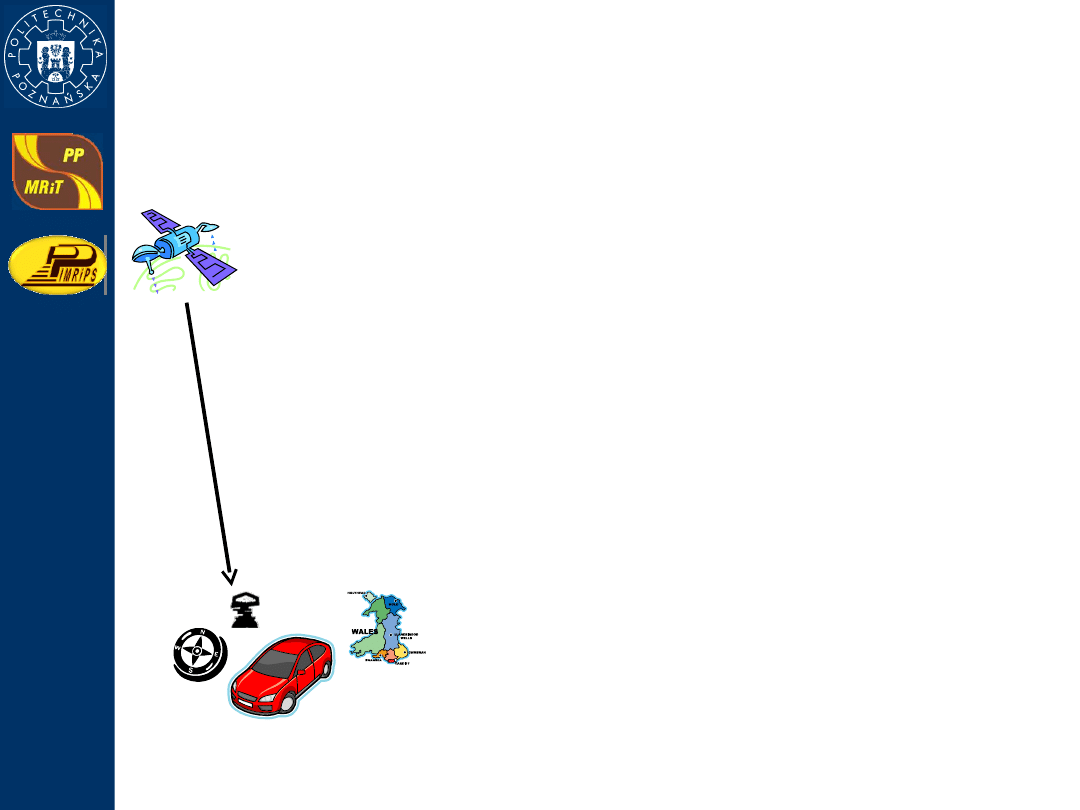
Tradycyjna nawigacja
• Nawigacja
– GPS: pozycjonowanie
– GIS: lokalizacja na mapie, wyszukiwanie tras
9
GPS
GIS

Tradycyjna nawigacja
• Nawigacja samochodowa
– odbiornik GPS + oprogramowanie GIS
– również: odbiornik GPS + laptop/palmtop/komórka +
GIS
10
Architektura systemu
11
GPS
GIS

Tradycyjna nawigacja
• Wady tradycyjnej nawigacji
– brak aktualnej i precyzyjnej informacji o
utrudnieniach
• korki
• remonty
– brak uwzględnienia cykli
dobowych/tygodniowych/sezonowych zmian
natężenia ruchu
– nieaktualna baza POI
• fotoradary
– brak możliwości śledzenia pojazdu (ang. vehicle
tracking)
12

13
Plan wykładu
• Tradycyjna nawigacja
• Dynamiczna nawigacja
• Inteligentna nawigacja
• Przyszłość systemów nawigacji
Dynamiczna nawigacja
• Nawigacja
– GPS: pozycjonowanie
– GIS: lokalizacja na mapie, wyszukiwanie tras
– GPRS: śledzenie pojazdu, dane o stanie pojazdu,
komunikaty do kierowcy, zmiana trasy
14
GPS
GIS
GPRS
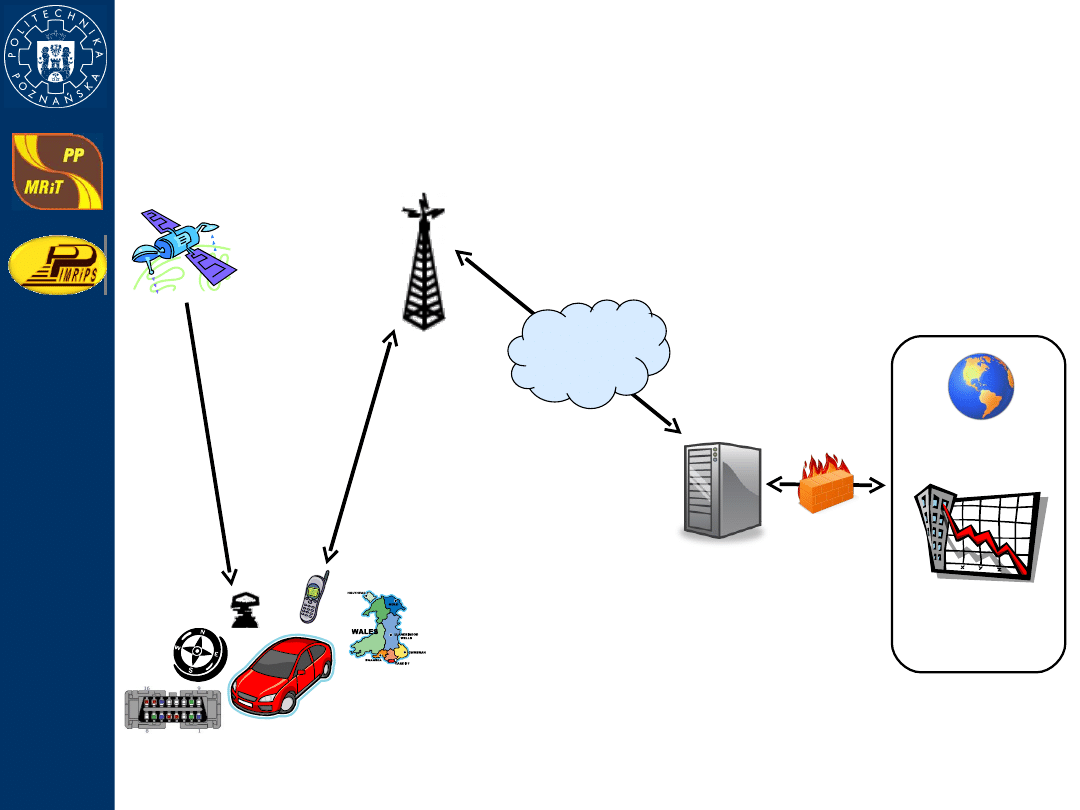
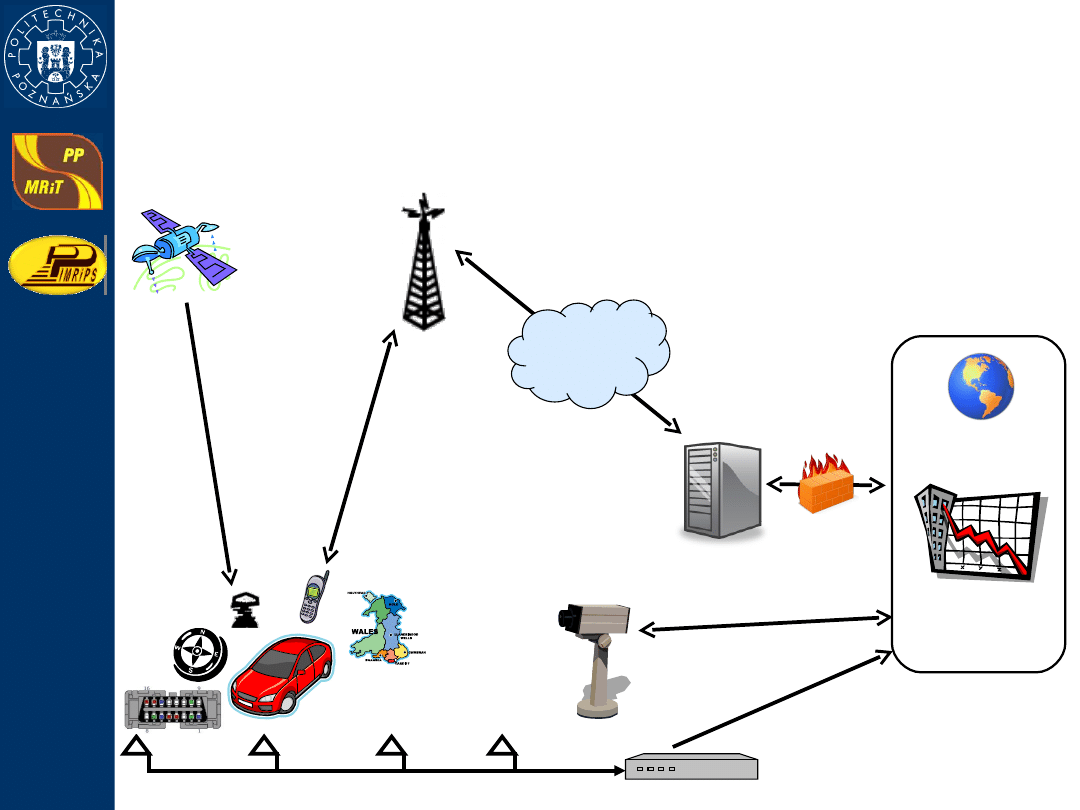
Architektura systemu
15
Internet
TCP/IP
GPS
GPRS
GIS
serwer
EOBD
Dynamiczna nawigacja
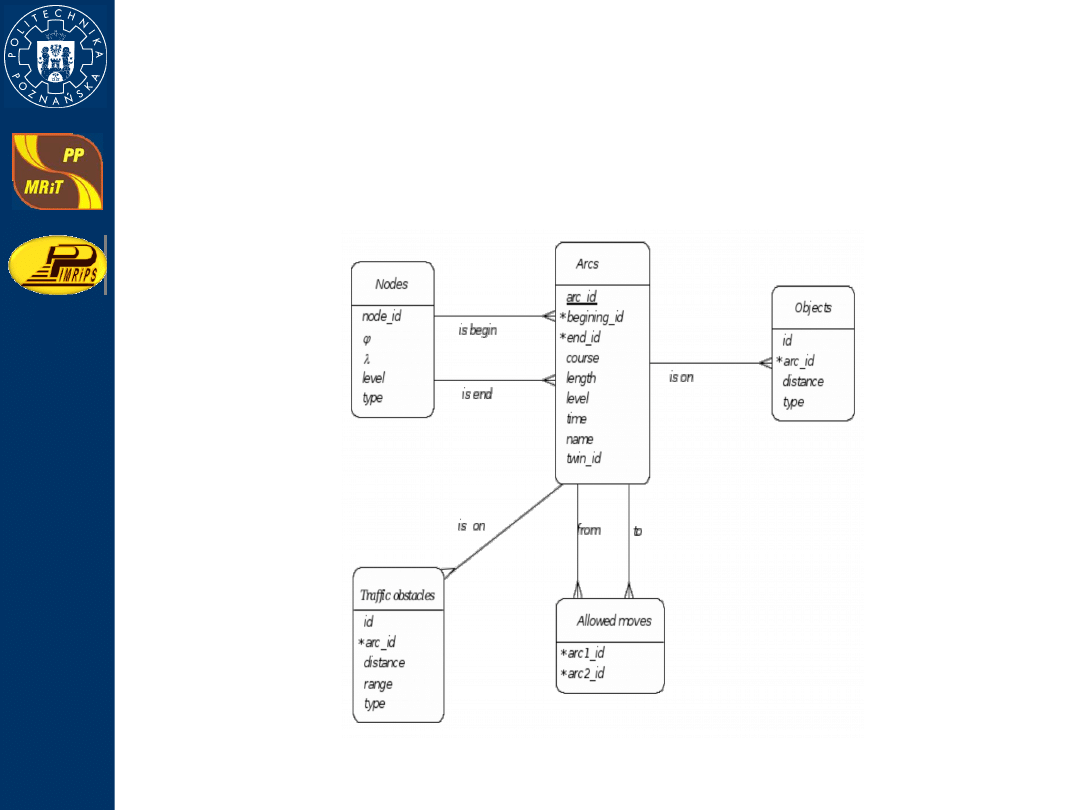
• Przechowywanie danych
16
Architektura systemu
17
Internet
TCP/IP
GPS
GPRS
GIS
GIS
Dane,
statystyki
serwer
baza danych
EOBD

Dynamiczna nawigacja
• Zastosowania
– zarządzanie flotą pojazdów
• dynamiczne sterowanie trasami
• monitorowanie pojazdów
• transprentność działań kierowców
– ratownictwo, policja, …
• szybka lokalizacja zaginionych pojazdów
18

19
Plan wykładu
• Tradycyjna nawigacja
• Dynamiczna nawigacja
• Inteligentna nawigacja
• Przyszłość systemów nawigacji

Inteligentna nawigacja
• Wymagania
– aktualna i precyzyjna informacja o utrudnieniach
• korki
• remonty
– uwzględnienie cykli
dobowych/tygodniowych/sezonowych zmian
natężenia ruchu
20
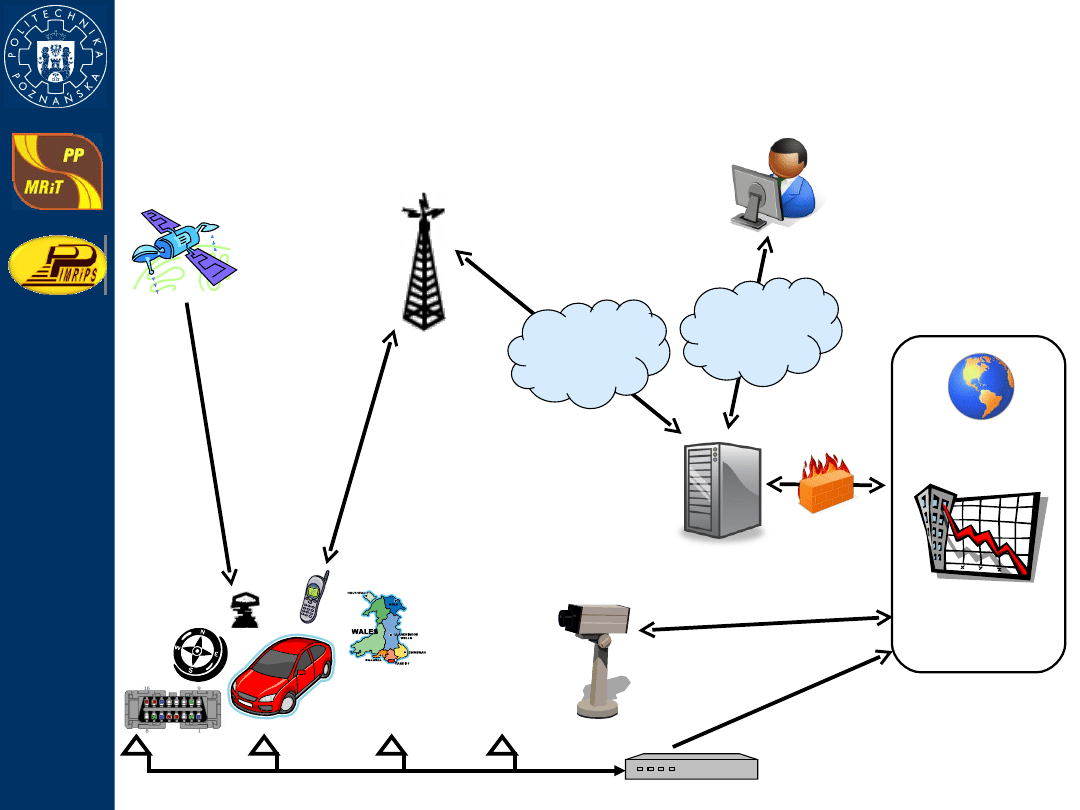
Architektura systemu
21
Internet
TCP/IP
GPS
GPRS
GIS
GIS
Dane,
statystyki
czujniki ruchu
video
serwer
baza danych
EOBD

Inteligentna nawigacja
• Monitorowanie stanu ruchu drogowego
– możliwie dokładna sieć ulic (pasy ruchu)
– czujniki ruchu:
• pętle indukcyjne
• kamery
• fotoelementy
– wstępnie zebrane dane z czujników przez system w
centrum sterowania ruchem
– informacje o uszkodzeniach nawierzchni, trudnościach
w ruchu, niebezpiecznych miejscach, częstych
wypadkach
• Oszacowanie czasów jazdy OD… DO…
– składanie tras z mniejszych odcinków
– uwzględnienie czasu przejazdu przez skrzyżowania (dla
różnych kierunków)
22

Inteligentna nawigacja
• Udostępnienie informacji o ruchu
– informatory miejskie dla mieszkańców
– aplikacje logistyczne dla służb miejskich
• identyfikacja zdarzeń
• planowanie
– aplikacje do nawigacji samochodowej
• Zaawansowane usługi
– optymalizacja rozstawienia pojazdów policyjnych –
zwiększenie efektywności „obławy” przy użyciu
minimalnej ilości radiowozów
– optymalizacja przydzielania zleceń dla taksówek
– inne specjalne usługa dla kierowców lub służb
interwencyjnych (policja, straż pożarna, karetki,
służby ochrony)
23
Architektura systemu
24
Internet
TCP/IP
GPS
GPRS
GIS
GIS
Dane,
statystyki
czujniki ruchu
Internet
TCP/IP
WWW
serwer
baza danych
EOBD
video

25
Plan wykładu
• Tradycyjna nawigacja
• Dynamiczna nawigacja
• Inteligentna nawigacja
• Przyszłość systemów nawigacji
Przyszłość systemów nawigacji
• Komunikacja między pojazdami V2V (Vehicle-to-
Vehicle)
– jazda pojazdów w kolumnie
– synchronizacja pojazdów podczas manewrów
(unikanie kolizji)
• zmiana pasa ruchu
• wyprzedzanie
• przejazd przez skrzyżowanie
• Inteligentne pojazdy
– bezzałogowe
– autonomiczne
26

DARPA Grand Challenge 2004
• DARPA Grand Challenge 2004
– termin: 13 marca 2004
– trasa: Barstow - Las Vegas
(ok. 320 km jazdy przez pustynne obszary)
– wymagania: całkowicie samodzielne pojazdy,
maksymalny czas - 10 godz.
– NAGRODA: 1 mln USD
27
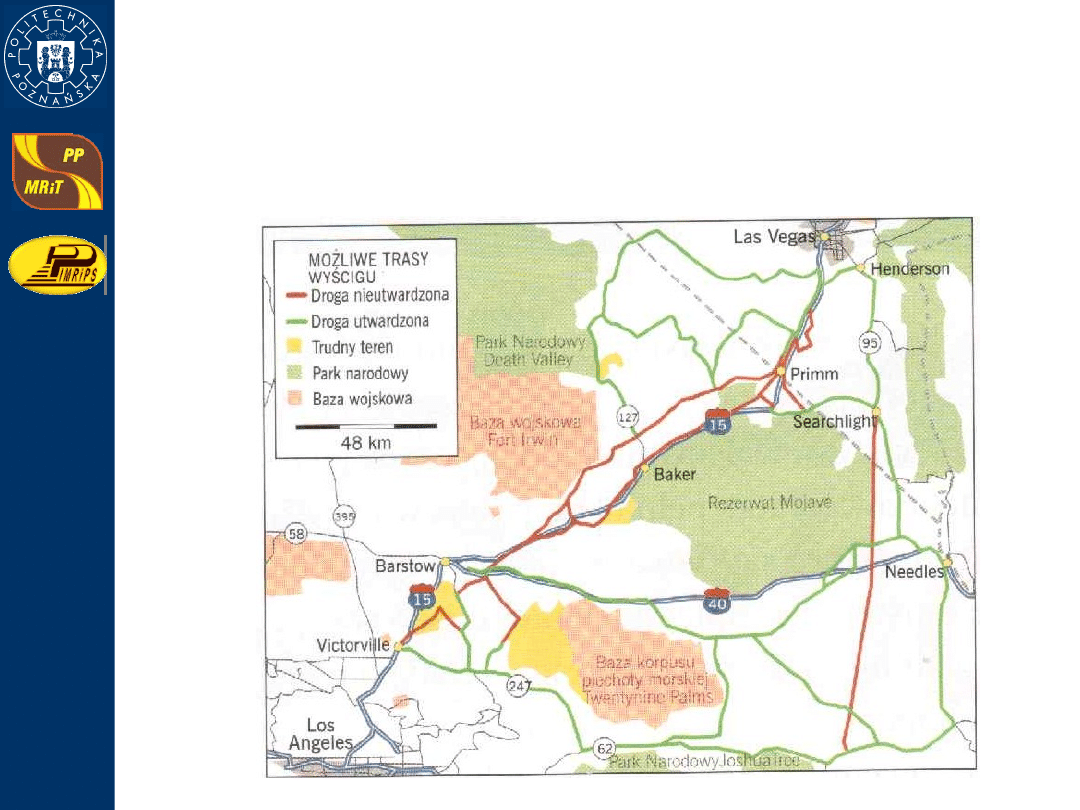
DARPA Grand Challenge 2004
• Trasa
DARPA Grand Challenge
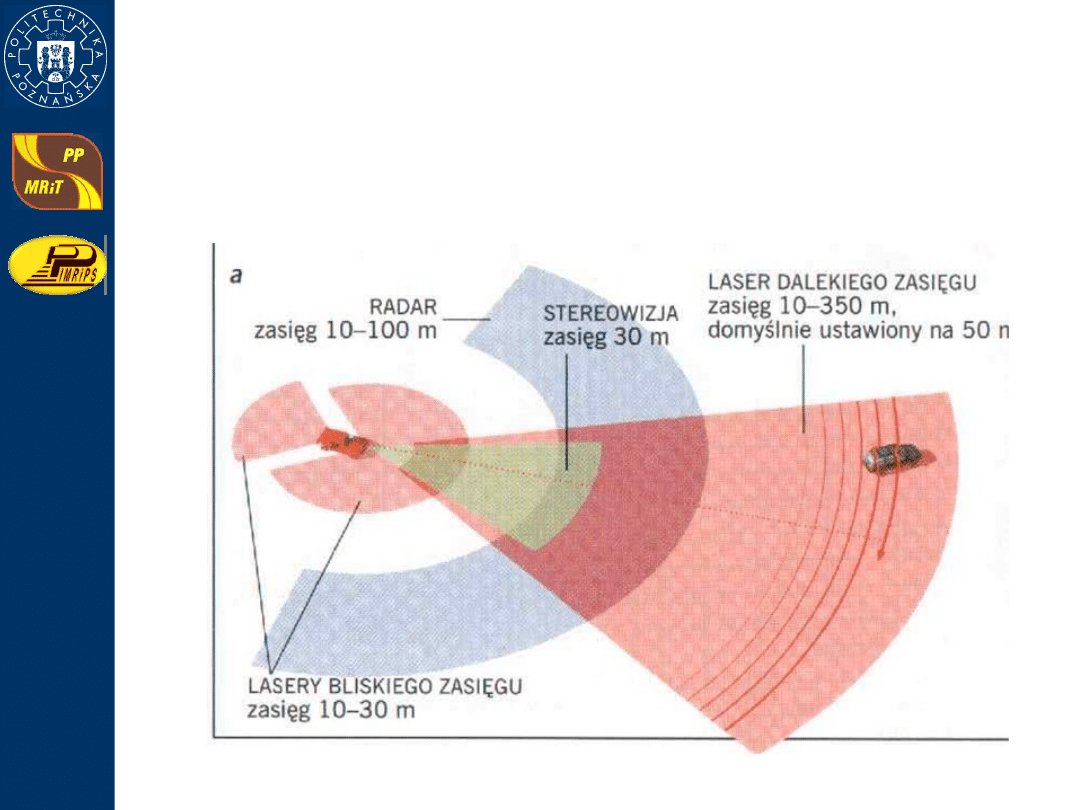
• Identyfikacja przeszkód
DARPA Grand Challenge 2004
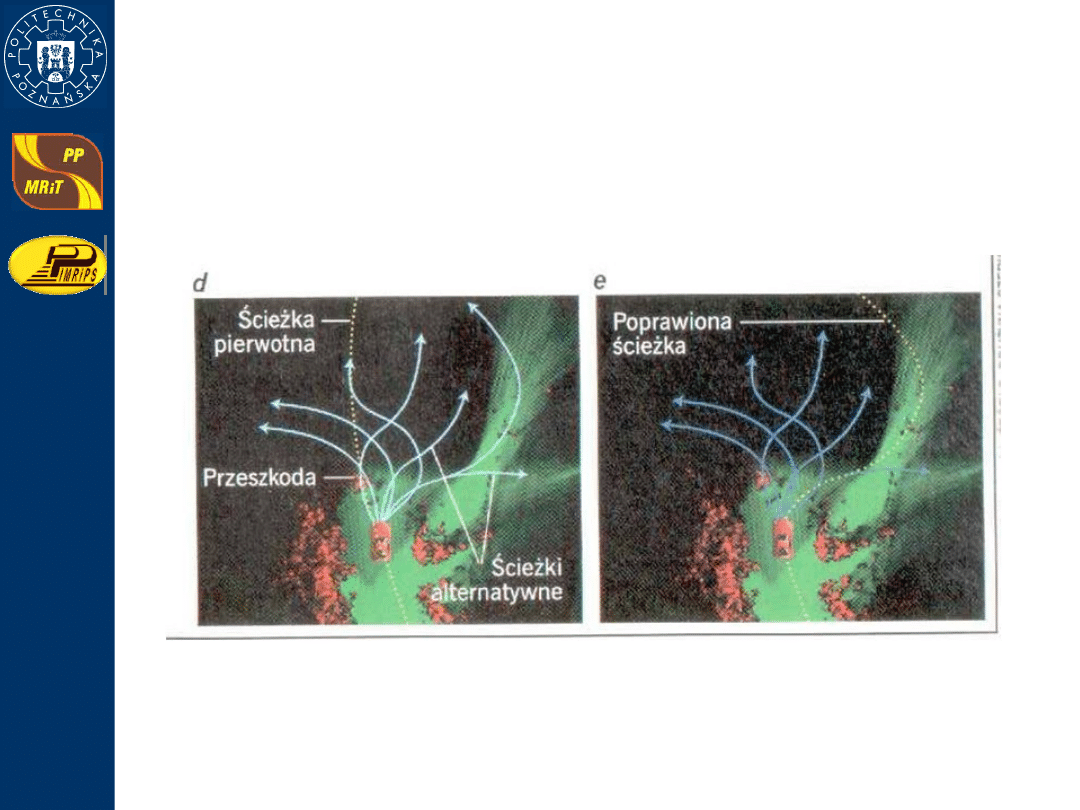
• Wyznaczanie ścieżki pomiędzy punktami
DARPA Grand Challenge 2004
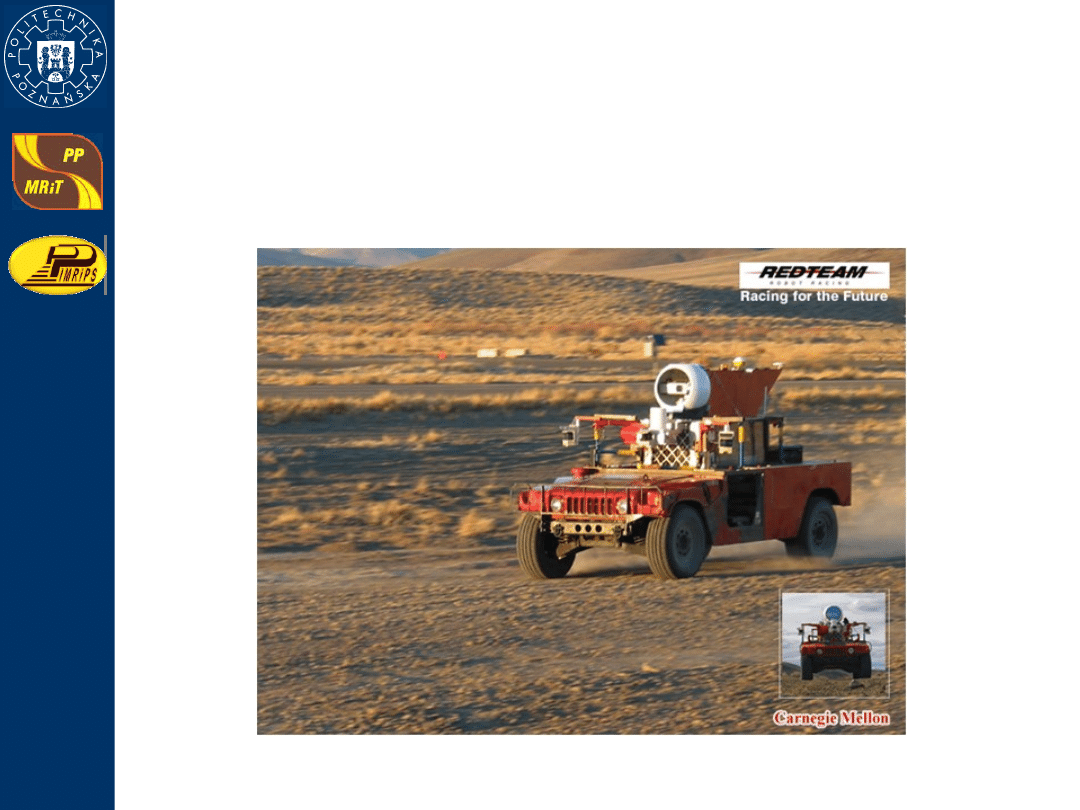
• Najlepszy (ale nie zwycięzca)
DARPA Grand Challenge 2005
• DARPA Grand Challenge 2005
– termin: 8 października 2005
– trasa: ok. 200 km jazdy przez pustynne obszary
– wymagania: całkowicie samodzielne pojazdy,
maksymalny czas - 10 godz.
– NAGRODA: 2 mln USD
32

DARPA Grand Challenge 2005
• Zwyciezca (Stanley, 6:54, Stanford University)
33
DARPA Urban Challenge 2007
• DARPA Urban Challenge 2007
– termin: 3 listopada 2007
– trasa: ok. 96km jazdy przez miejskie obszary
– wymagania: całkowicie samodzielne pojazdy,
maksymalny czas - 6 godz.
– NAGRODA: 2 mln USD
34
DARPA Urban Challenge 2007
• Zwyciezca (Boss, 4:10:20, Carnegie Mellon
University)
35

36
Dziękuję…
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
Wyszukiwarka
Podobne podstrony:
SII 20 Systemy nawigacji satelitarnej w zarzadzaniu flota pojazdow
123 19 System K lacznik C'id 13934
ćwiczenie 14 inteligentne systemy elektryczne, systemy inteligentne
19 System edukacji w Polsceid 18198 ppt
Automatyka budynkowa wybrane systemy inteligentnych instalacji elektrycznych A Klajn
ćwiczenie 15 inteligentne systemy elektryczne, systemy inteligentne
systemy inteligentne cw8
SII 21 Systemy informacyjne logistyki (LIS)
systemy inteligentne cw8 (2)
19 zapis binarny systemow analogowych
Inteligentny budynek, systemy s Nieznany
INERCJALNY SYSTEM NAWIGACYJNY
więcej podobnych podstron