Wykład
5
Zasady zmienności w dynamice
punktu
materialnego
Wykład 5
Zasady pędu, energii kinetycznej i krętu są
związane z II prawem dynamiki NEWTONA.
Pęd PM1
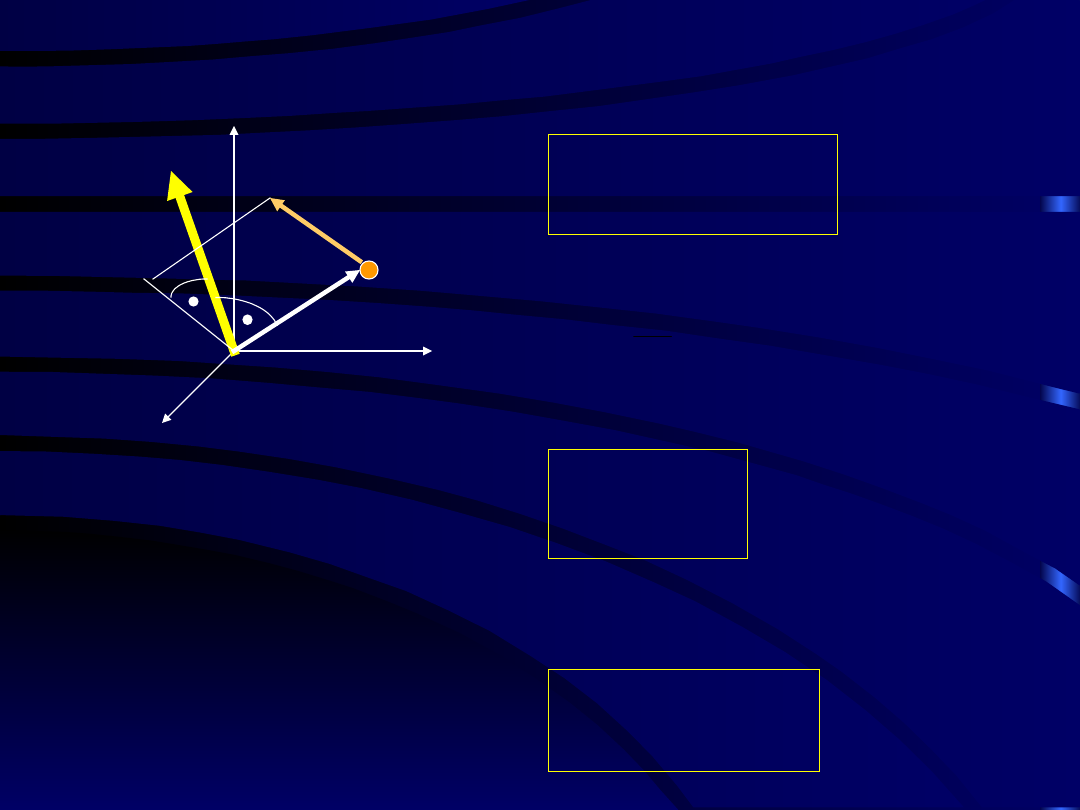
5.1 Pęd punktu
materialnego
(ilość ruchu PM)
v
m
p
z
z
y
y
x
x
e
p
e
p
e
p
p
p
y
z
O
x
Moduł wektora pędu:
);
p
p
p
(
p
p
2
z
2
y
2
x
Jednostka pędu:
]
s
N
[
]
s
m
kg
[
]
p
[
Pęd
PM2
v
m
Zasada pędu
PM1
F
a
m
p
const
m
dla
),
v
m
(
dt
d
p
Różniczkowa zasada zmiany wektora
pędu:
Pochodna po czasie wektora pędu PM
jest równa wektorowi siły działającej na
ten punkt.
i
i
i
)
R
F
(
F
:
gdzie
F
p
Związek wektora pędu PM z siłą działającą
na ten punkt i z II prawem dynamiki Newtona
Różniczkową zasadę zmiany pędu możemy również przedstawić:
;
Q
p
p
dt
F
p
d
dt
F
p
d
1
2
t
t
t
t
2
1
2
1
2
1
t
t
dt
F
Q
-impuls siły lub popęd (t
1
t
2
)
Q
)
v
v
(
m
Q
p
p
1
2
1
2
lub
Całkowa zasada zmiany pędu:
Zmiana wektora pędu w skończonym przedziale czasu (t
2
-t
1
)
jest równa impulsowi wektora siły w tym przedziale.
Zasada pędu
PM2
W szczególności,
jeśli
:
0
F
;
const
p
p
0
p
p
const
p
0
p
2
1
1
2
lub
Zasada zachowania pędu punktu materialnego:
Jeżeli wypadkowy wektor sił działających na PM
jest równy zeru to wektor pędu jest stały.
Uwaga:
w praktyce może mieć miejsce sytuacja, np.:
0
F
,
0
F
,
0
F
z
y
x
wówcz
as
;
const
p
,
const
p
const
v
m
p
z
y
x
x
ale
Zasada pędu PM3
5.2 Praca i moc siły, energia kinetyczna PM
A
1
A
2
A
F
0
x
z
y
1
r
2
r
r
1
2
r
r
r
)
A
A
(
łuk
s
2
1
]
F
,
F
,
F
[
F
z
y
x
Praca siły
1
Praca siły
Praca
siły 2
|;
ds
|
|
r
d
|
,
ds
s
,
r
d
r
:
A
A
1
2
1[N]1[m]=1[J]
2
1
2
1
A
A
A
A
z
y
x
dz
F
dy
F
dx
F
r
d
F
L
:
A
A
drodze
na
F
sił
aca
Pr
2
1
[Nm]
Moc siły
Moc siły
dt
)
z
F
y
F
x
F
(
dz
F
dy
F
dx
F
dL
z
y
x
z
y
x
Pracę wykonaną przez siłę w ciągu jednostki
czasu nazywamy
mocą tej siły
.
Moc oznaczamy przez
N
]
W
[
cos
v
F
v
F
dt
dL
N
Energia kinetyczna i zasada równoważności pracy
i energii kinetycznej
2
1
2
1
A
A
v
v
;
r
d
F
v
d
v
m
dt
v
)
F
dt
v
d
m
(
dt)
v
r
(d
L
E
E
lub
L
mv
2
1
mv
2
1
1
2
2
1
2
2
Energia kinetyczna p.m.:
2
mv
2
1
E
Zasada równoważności:
Zmiana energii kinetycznej PM w skończonym
przedziale czasu jest
równa sumie prac, które wykonały w tym samym
czasie wszystkie siły działające na ten punkt.
Energia
kinetyczna
Zasada zachowania energii mechanicznej PM
Zasada zachowania jest szczególnym przypadkiem zasady
równoważności pracy i energii kinetycznej PM
•Załóżmy, że w pewnym obszarze przestrzeni działa pole sił:
)
z
,
y
,
x
(
F
F
•Jeśli w każdym punkcie przestrzeni
to takie pole nazywamy
jednorodnym.
const
)
z
,
y
,
x
(
F
V=V(x,y,z) - jest potencjałem pola sił lub energią potencjalną PM
Zas. zachow.
E
M
PM1
•Jeśli:
z
V
F
,
y
V
F
,
x
V
F
.
,
V
d
gra
F
z
y
x
tzn
to takie pole nazywamy
potencjalnym.
•Wtedy pracę L w potencjalnym polu sił przedstawimy:
2
1
2
1
A
A
2
1
A
A
V
V
dV
)
dz
z
V
dy
y
V
dx
x
V
(
L
Wniosek:
Praca w potencjalnym polu sił nie zależy
od drogi lecz tylko od położenia
początkowego i końcowego.
Zasada zachowania energii mechanicznej PM:
Po podstawieniu powyższego wzoru na pracę L do prawej strony wzoru
wyrażającego zasadę równoważności pracy i energii kinetycznej otrzymamy:
const
V
E
V
E
2
2
1
1
E
m
= E + V
-nazywamy energią mechaniczną
Zas. zachow. E
M
PM2
5.3 Kręt (moment pędu) punktu
materialnego
0
x
y
z
0
k
r
A
v
m
v
m
r
k
0
0
0
M
F
r
)
v
m
r
(
dt
d
k
Zasada zmiany krętu p.m.:
0
0
M
k
Zasada zachowania krętu p.m.:
Jeśli
0
M
0
dla t0 to mamy
const
k
0
Kręt i zasada krętu
PM
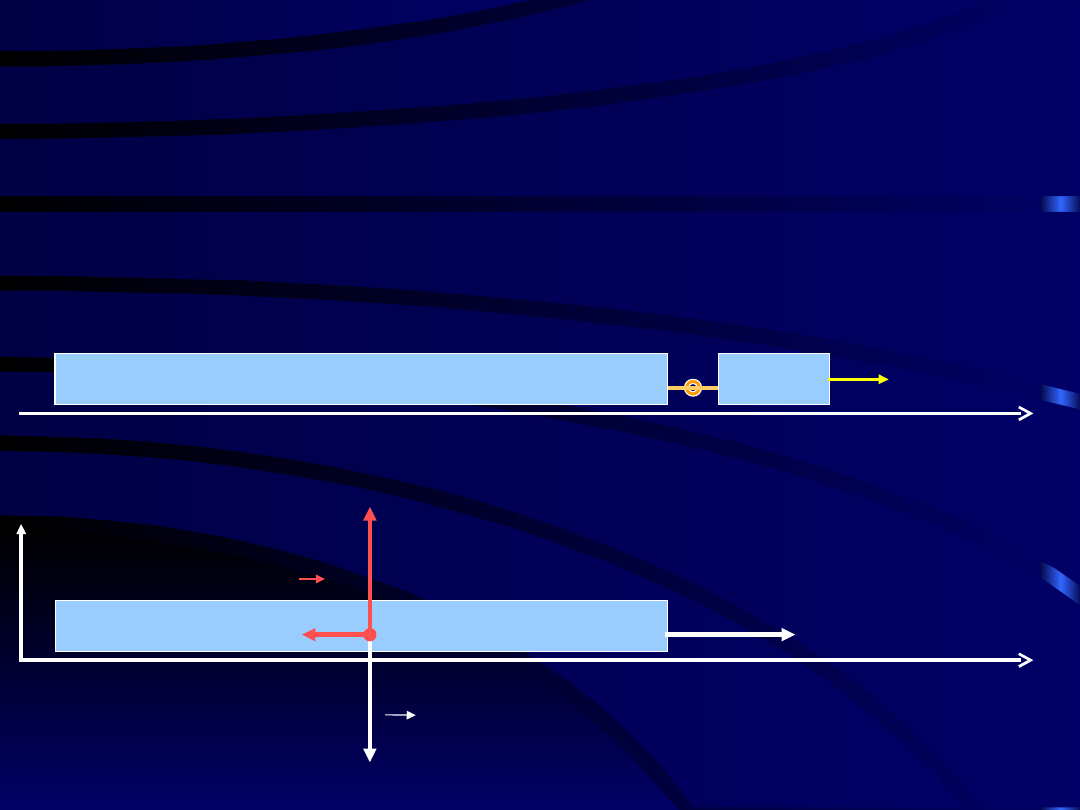
Przykład 1.
W celu zmierzenia ciężaru zestawu wagonów wstawiono między lokomotywą
a pierwszym wagonem dynamometr. W ciągu czasu t
1
=2[min] dynamometr
wskazywał średnio siłę F=100,8[T]. W tym czasie pociąg ze stanu spoczynku
nabrał prędkości v
1
=57,6[km/h]. Współczynnik tarcia
=0,02. Obliczyć ciężar
zestawu wagonów.
Przykład
1/1
N
x
F
G
T
y
Przykład
1/2
1
0
t
t
dt
)
N
G
T
F
(
Q
Q
)
v
v
(
m
lub
Q
p
p
0
1
0
1
Rozwiązanie:
Z zasady zmiany pędu w postaci całkowej mamy:
W postaci skalarnej na oś x (t
o
=0, m=G/g):
;
gt
v
Fgt
G
t
)
G
F
(
v
g
G
1
1
1
1
1
Obliczenia: t
1
= 120[s], v=16[m/s], F=100,8[T];
G=3000,7[T]
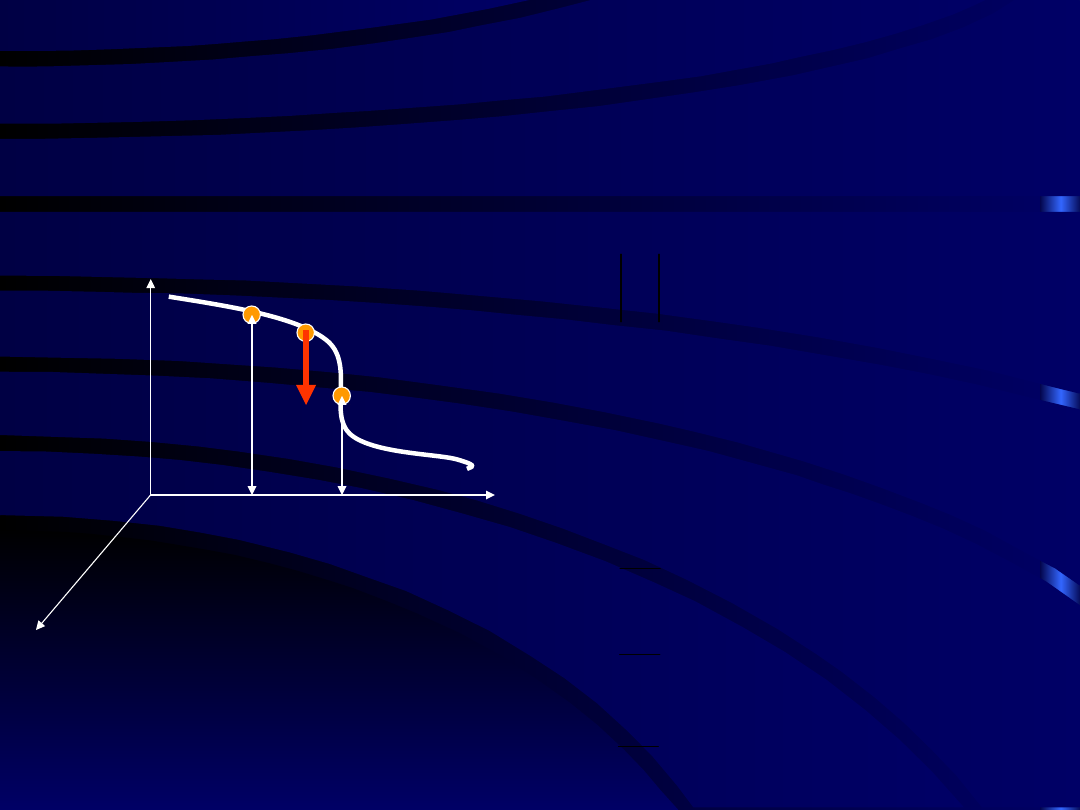
Przykład 2.
Obliczyć pracę punktu materialnego w polu grawitacyjnym w
pobliżu Ziemi między położeniami A
0
i A
1
. Wyznaczyć energię
potencjalną punktu materialnego.
x
y
z
O
A
0
A
1
z
0
z
1
Q
]
mg
,
0
,
0
[
Q
;
mg
Q
1
0
1
0
z
z
1
0
A
A
z
)
z
z
(
mg
mgdz
dz
Q
L
);
z
(
V
C
mgz
V
mg
z
V
Q
,
C
)
y
(
V
0
y
V
Q
,
C
)
x
(
V
0
x
V
Q
3
z
2
y
1
x
Przykład
2
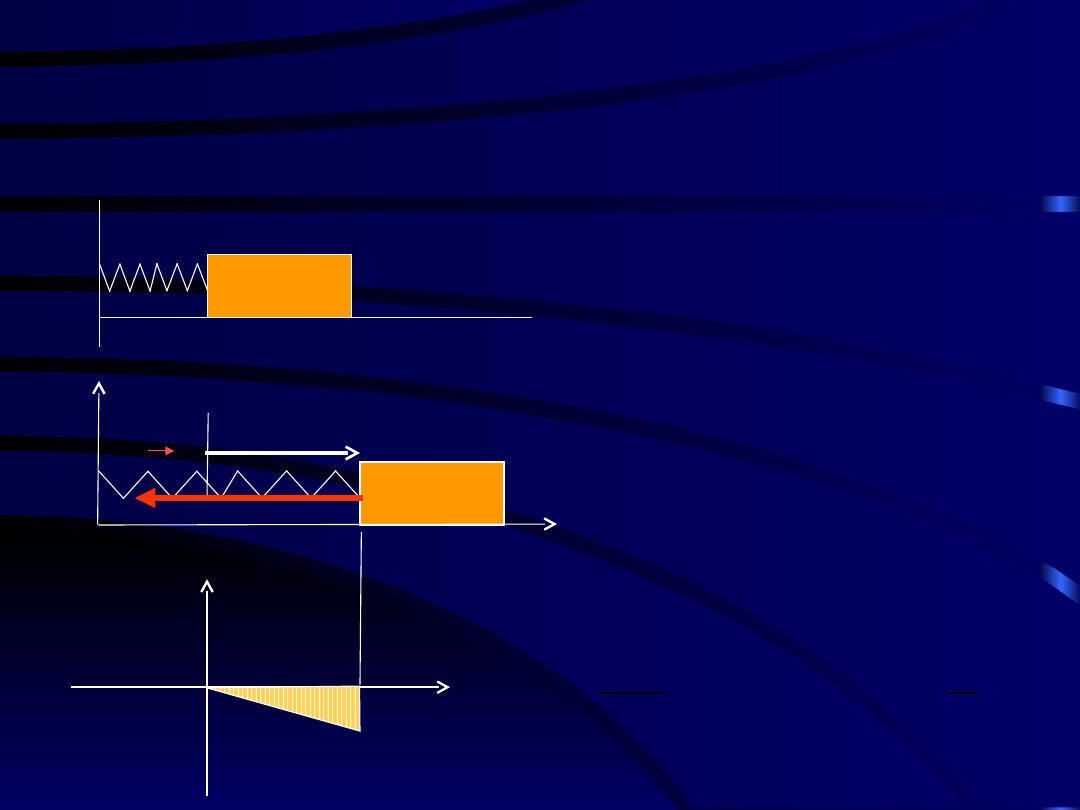
Przykład 3.
Obliczyć energię potencjalną siły sprężystej w
sprężynie o sztywności k.
O
kx
)
x
(
S
]
0
S
,
0
S
,
kx
S
[
S
z
y
x
2
x
kx
2
1
V
,
S
dx
dV
-kx
S
x
x
Przykład
3
O
x
S
y
x
Przykład
4
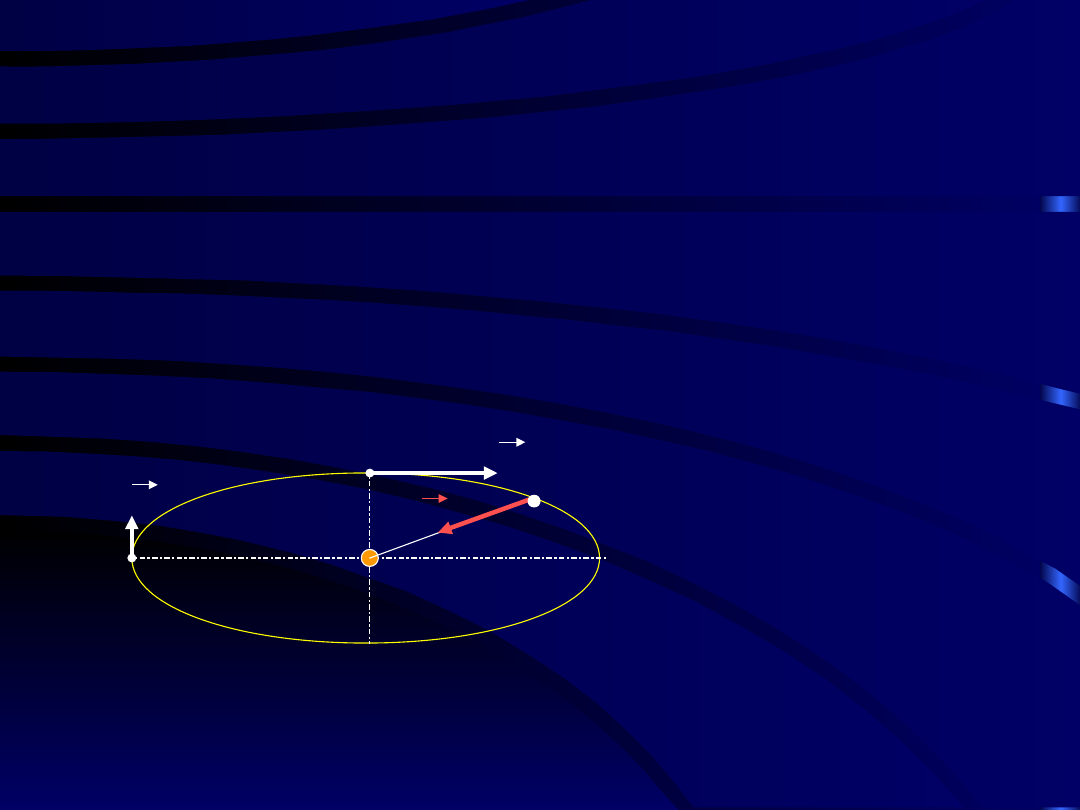
Przykład 4.
Punkt
M
porusza się dokoła nieruchomego środka pod działaniem
siły przyciągającej do tego środka. Znaleźć prędkość
v
2
w punkcie
toru najbardziej oddalonym od środka, jeżeli prędkość punktu
w miejscu najbliższym środka wynosi
v
1
=3[m/s],
a promień
r
2
jest
5
razy większy od
r
1
.
M
1
M
2
M
v
1
v
2
F
r
1
r
2
0
Momenty
bezwładności
5.4. Podstawy teorii
momentów bezwładności
Środek masy i środek ciężkości UPM i CS
Założenia:
•Weźmy pod uwagę układ n punktów materialnych o
masach m
i
(i=1,...,n)
•Położenie tych punktów w stosunku do punktu
odniesienia O określone jest wektorami r
i
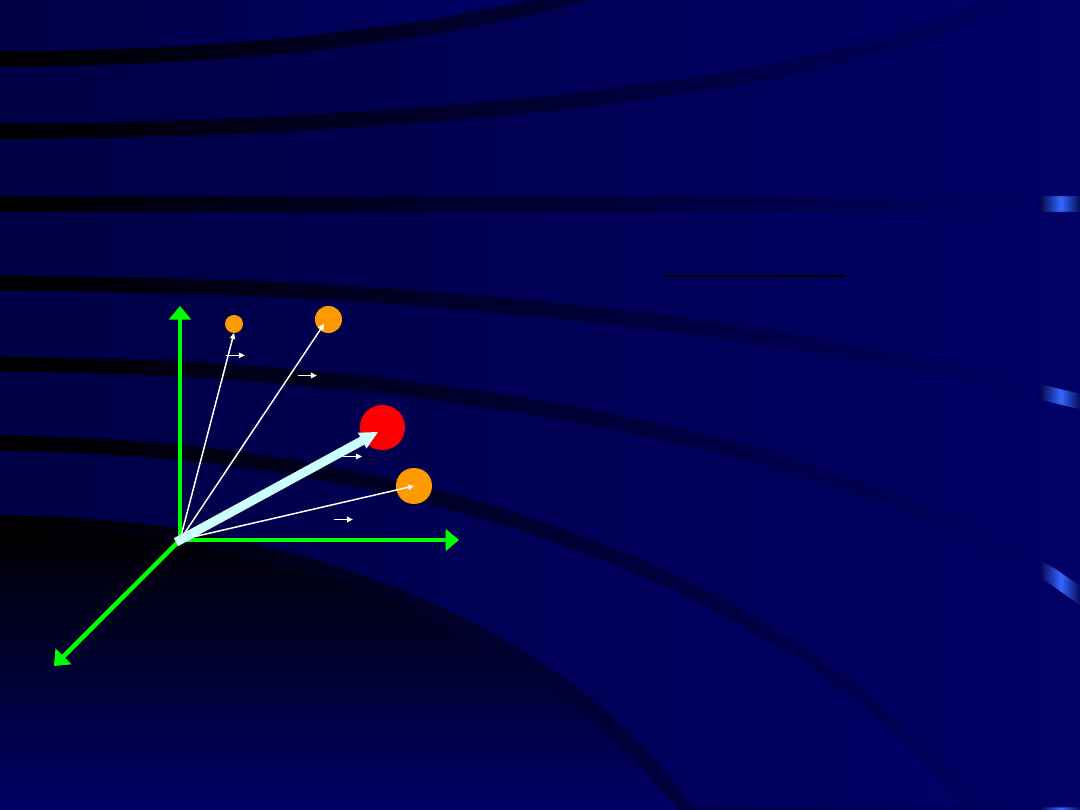
• Wprowadźmy umownie punkt C, którego
położenie
określone jest związkiem:
Punkt C nazywamy
środkiem masy
UPM.
m
1
m
2
m
n
x
y
z
O
r
1
r
2
r
n
n
i
i
n
i
i
i
c
m
r
m
r
1
1
C
r
C
masa punktu C:
n
i
i
m
m
1
Środek masy UPM1
Środek masy UPM2
];
z
,
y
,
x
[
r
c
c
c
c
;
m
z
m
z
;
m
y
m
y
;
m
x
m
x
n
i
i
i
c
n
i
i
i
c
n
i
i
i
c
1
1
1
Pojęcie
środka masy
ma charakter ogólny i może być
zastosowane do dowolnego UPM, niezależnie od tego
czy układ jest sztywny czy nie, czy jest w ruchu czy w
spoczynku oraz czy znajduje się w polu sił.
Środek masy UPM w układzie Oxyz
Środek masy CS1
O
x
y
z
m
dm
r
r
m
c
;
m
xdm
x
m
c
;
m
ydm
y
m
c
;
m
zdm
z
m
c
Środek masy ciała sztywnego ciągłego
C
r
c
Gęstość
CS2
const.
V
m
V
Gęstość CS
jednorodnego:
Gęstość CS dwuwymiarowego:
(powłoki, cienkie płyty)
2
m
kg
dA
dm
A
m
kg
dL
dm
L
Gęstość CS jednowymiarowego:
(pręty, liny, belki) :
3
m
kg
dV
dm
V
Gęstość CS dowolnego:
Gęstość CS ciągłego
Na obiekty znajdujące się w polu przyciągania Ziemi, działają
siły ciążenia. Siły te zastępujemy wypadkową siłą ciężkości.
Przy założeniu, że rozmiary obiektu są małe w porównaniu do
rozmiarów Ziemi można siły ciężkości uznać za równoległe i
wyznaczyć środek równoległych sił ciężkości. Punkt taki
nazywamy środkiem ciężkości obiektu (UPM lub CS).
Ciężar właściwy CS:
dV
dQ
Środek
ciężkości
Środek ciężkości
g
m
Q
Q
r
Q
r
i
i
n
i
i
n
i
i
i
c
:
gdzie
,
1
1
Środek ciężkości
UPM:
Wzory na środek masy CS upraszczają się gdy
mamy do czynienia z ciałem jednorodnym tzn.
takim,
w
którym
masa
jest
rozłożona
równomiernie w całej jego objętości.
Środek masy CS
jednorodnego
;
V
xdV
x
V
c
;
V
ydV
y
V
c
;
V
zdV
z
V
c
Środek masy CS jednorodnego
• Ze wzorów na środek masy wynika, że
jego
położenie w jednorodnym CS zależy tylko
od
jego geometrii.
Podsumowani
e
Podsumowanie
Ogólne własności jednorodnego CS:
• Jeżeli ciało ma płaszczyznę symetrii to środek
masy leży na tej płaszczyźnie.
• Jeżeli ciało ma oś symetrii to środek masy leży na
tej osi.
• Jeżeli ciało ma środek symetrii to środek masy
leży w tym środku.
Momenty
statyczne
Momentem statycznym
UPM względem płaszczyzny
nazywamy sumę iloczynów mas każdego punktu przez
ich odległości od tej płaszczyzny.
5.5 Momenty statyczne
V
xy
i
n
i
i
xy
zdm
S
z
m
S
:
c.s.
Dla
:
u.p.m.
Dla
1
Np. względem płaszczyzny 0xy:
;
m
S
x
yz
c
;
m
S
y
xz
c
;
m
S
z
xy
c
m
1
z
1
m
2
z
2
m
n
z
n
m
3
z
3
Współrzędne środka masy można określić za
pomocą momentów statycznych względem
płaszczyzn układu Oxyz:
Momenty stat. a środek
masy
Momenty statyczne a środek masy
x
z
y
0
m
1
A
1
m
2
A
2
m
i-1
A
i-1
Momenty
bezwładności
z
i
y
i
x
i
m
i
r
i
A
i
A
i
[ x
i
, y
i
, z
i
]
n
1,2,...,
i
;
2
2
2
i
i
i
i
i
z
y
x
r
r
x
y
z
0
10.3 Momenty bezwładności
Momenty bezwł. wzgl.
płaszczyzn
Momenty bezwładności względem
płaszczyzn Oxyz
;
m
x
I
m
y
I
m
z
I
i
i
i
yz
i
i
i
xz
i
i
i
xy
2
2
2
;
;
Dla UPM:
;
dm
x
I
;
dm
y
I
dm
z
I
m
yz
m
xz
m
xy
2
2
2
;
Dla CS:
Momenty bezwł. wzgl.
osi
Momenty bezwładności względem osi 0xyz
;
m
)
y
x
(
I
m
)
z
x
(
I
m
)
z
y
(
I
i
i
2
i
2
i
z
i
i
2
i
2
i
y
i
i
2
i
2
i
x
;
;
Dla UPM:
m
z
m
y
m
x
;
dm
)
y
x
(
I
dm
)
z
x
(
I
dm
)
z
y
(
I
2
2
2
2
2
2
;
;
Dla CS:
Moment bezwł. wzgl.
bieguna
Moment bezwładności względem bieguna 0
i
i
i
i
i
i
i
i
m
r
m
)
z
y
x
(
I
2
2
2
2
0
Dla UPM:
m
m
dm
r
dm
)
z
y
x
(
I
2
2
2
2
0
Dla CS:
Wzajemne
zależności
0
0
I
,
I
,
I
,
I
,
I
,
I
,
I
z
y
x
yz
xz
xy
yz
xz
z
yz
xy
y
xz
xy
x
I
I
I
,
I
I
I
,
I
I
I
)
I
I
I
(
I
I
I
I
I
z
y
x
yz
xz
xy
2
1
0
0
lub
Ważne zależności
Momenty
dewiacyjne
zy
yz
zx
xz
yx
xy
D
D
,
D
D
,
D
D
Momenty dewiacyjne (mieszane) w układzie Oxyz
0
yz
xz
xy
D
,
D
,
D
i
i
i
i
i
i
yz
i
i
i
xz
i
i
i
xy
m
z
y
D
,
m
z
x
D
,
m
y
x
D
Dla UPM:.:
m
yz
m
xz
m
xy
yzdm
D
,
xzdm
D
,
xydm
D
Dla CS:
Macierz
bezwładności
I =
z
zy
zx
yz
y
yx
xz
xy
x
I
D
D
D
I
D
D
D
I
I
-
opisuje własności bezwładnościowe CS lub UPM.
Macierz bezwładności (tensor
bezwładności)
x
y
z
0
Moment bezwł.
względem l
l
l
l
l
– dowolna prosta
przechodząca
przez początek układu 0
dm
h
m
l
l
dm
h
I
dm
h
dI
2
2
)
z
,
l
(
),
y
,
l
(
),
x
,
l
(
Moment bezwładności względem dowolnej osi l
Moment bezwł. względem l
c.d.
;
cos
cos
D
cos
cos
D
cos
cos
D
cos
I
cos
I
cos
I
I
yz
xz
xy
z
y
x
l
2
2
2
2
2
2
Po przekształceniach moment bezwładności
względem osi
l
l
wynosi
wynosi
:
:
Osie główne centralne
Jeżeli tak zorientujemy w przestrzeni osie układu
Cxyz
,
że
D
xy
=D
xz
=D
yz
=0
,
to takie osie nazywamy
głównymi
centralnymi.
Układ takich osi oznaczamy:
C123
.
Osie główne centralne i momenty bezwładności
względem nich
Lokując początek układu współrzędnych w środku
masy ciała mamy
centralny
układ osi Cxyz.
Główne centralne momenty
bezwładności
Momenty bezwładności względem
osi głównych centralnych
oznaczamy odpowiednio:
I
1
, I
2
, I
3
i nazywamy
głównymi centralnymi momentami bezwładności
c.s.
2
3
2
2
2
1
cos
I
cos
I
cos
I
I
l
Moment bezwładności względem dowolnej osi
l
, wyrażony
w układzie
głównym centralnym C123
ma postać:
Twierdzenie
Steinera
Twierdzenie Steinera
Moment bezwładności CS względem dowolnej osi
l
1
jest równy sumie momentu bezwładności
względem osi do niej równoległej
l
przechodzącej
przez środek masy tego ciała oraz iloczynu masy
ciała i kwadratu odległości między tymi osiami.
l
l
1
d
C
m
Momenty bezwładności względem osi równoległych
2
1
d
m
I
I
l
l
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
Wyszukiwarka
Podobne podstrony:
p05 065
p05 081
p05 003
p05 071
p05 029
p05 001
p05 022
p05 010
p05 044
p05 011
p05 039
p05 018
p05 043
p05 047
p05 072
p05 002
p05 019
p05 012
p05 015
więcej podobnych podstron