
ZIEMSKIE GLOBALNE SYSTEMY
ODNIESIENIA I ICH REALIZACJE
Workshop
„NOWE OBOWIĄZUJĄCE SYSTEMY WSPÓŁRZĘDNYCH
ZIEMSKICH
I NIEBIESKICH ORAZ ICH WZAJEMNE RELACJE”
Warszawa, 27-28 maja 2004 roku
Treść referatu
·
Służby ILS, IPMS i BIH i ich rola w tworzeniu i konserwacji
ziemskiego układu odniesienia
· Lokalne i regionalne układy odniesieni przed rozwinięciem się
satelitarnych i kosmicznych technik pomiarowych
· Powstawanie Europejskiego Układu odniesienia ED-50
· Systemy odniesienia WGS – 72 i WGS-84, GRS-80
· Służba IERS i jej rola w tworzeniu i konserwacji ziemskich
układów odniesienia
· ITRF’88 –ITRF’2000 przegląd parametrów transformacji i ich
skutki praktyczne
· Wektory prędkości – modele NUVEL-1A
· ETRF-89 jako podzbiór układu ITRF
· Przestrzenne systemy odniesienia używane w Polsce
· Podsumowanie sugestie i wnioski
ZIEMSKIE GLOBALNE SYSTEMY ODNIESIENIA I ICH
REALIZACJE
ZIEMSKIE GLOBALNE SYSTEMY ODNIESIENIA I ICH
REALIZACJE
Służby ILS, IPMS i BIH i ich rola w
tworzeniu
i konserwacji ziemskiego układu
odniesienia (1)
Rozwój naziemnych technik pomiarowych pozwalających
rozwijać sieci geodezyjne na dużych obszarach spowodował
konieczność
zapewnienia
równoległości
osi
układu
współrzędnych geograficznych do małej półosi elipsoidy
odniesienia.
Równoległość ta jest spełniona dzięki stosowaniu równania
Laplace’a do redukcji azymutów na elipsoidę odniesienia.
Problem skomplikował się po opisaniu matematycznym przez
Eulera możliwości przemieszczania się osi obrotu względem bryły
ziemskiej.
Powstała konieczność określania położenia chwilowej
osi obrotu Ziemi względem umownego układu współrzędnych
ziemskich.
Ze względu na wiele czynników, które zaburzały model
matematyczny przedstawiony przez Eulera koniecznym stało się
wyznaczanie współrzędnych chwilowego bieguna Ziemi w sposób
obserwacyjny.
tg
L
a
A
ZIEMSKIE GLOBALNE SYSTEMY ODNIESIENIA I ICH
REALIZACJE
Służby ILS, IPMS i BIH i ich rola w
tworzeniu
i konserwacji ziemskiego układu
odniesienia (2)
Międzynarodowa Asocjacja Geodezji
(IAG)
w 1899 roku powołala
Międzynarodową Służbę Szerokości
(ILS)
.
Biegun układu
współrzędnych
został określony na podstawie obserwacji zmian
szerokości z lat 1900-1905 i stał się osią pierwszego umownego
kładu współrzędnych.
Do określenia
południka zerowego
doszło kilkanaście lat później.
Wiązało się to technicznymi możliwościami wyznaczania długości
geograficznej wymagającej możliwości transferu czasu dla
południka zerowego (Greewich). W tym celu powołano w 1912
roku Międzynarodowe Biuro Czasu (
BIH
– Bureau International
de
l’Heure).
Czas
również
wyznaczano
z
obserwacji
astronomicznych.

ZIEMSKIE GLOBALNE SYSTEMY ODNIESIENIA I ICH
REALIZACJE
Służby ILS, IPMS i BIH i ich rola w
tworzeniu
i konserwacji ziemskiego układu
odniesienia (3)
Kilka dat z historii
1900 – Rozpoczęcie wykonywania obserwacji przez
ILS
1912 – Powołanie Międzynarodowego Biura Czasu
(BIH)
1962 – Powołanie Międzynarodowej Służby Ruchów Bieguna
(IPMS)
1966 – Wprowadzenie ziemskiego układu odniesienia Standard
Earth III
1967 – Zdefiniowanie początku umownego układu
współrzędnych ziemskich
CIO
1967 – Przyjęcie przez IUGG geodezyjnego systemu odniesienia
GRS67
1968 – Wprowadzenie systemu pozycji bieguna i czasu UT
dystrybuowanego przez BIH
1972 – Wprowadzenie ziemskiego układu odniesienia
WGS72
1973 – Wprowadzenie satelitarnych obserwacji Dopplerowskich
do wyznaczeń pozycji bieguna prowadzonych przez BIH
początek końca ery obserwacji astrometrycznych
ZIEMSKIE GLOBALNE SYSTEMY ODNIESIENIA I ICH
REALIZACJE
Służby ILS, IPMS i BIH i ich rola w
tworzeniu
i konserwacji ziemskiego układu
odniesienia (4)
Kilka dat z historii c.d.
1979 – Przyjęcie przez IUGG geodezyjnego systemu odniesienia
GRS80
1979 – Wprowadzenie obserwacji laserowych Lageosa i LLR do
wyznaczeń pozycji bieguna i UT
1980 – Początek kampanii – Monitoring of the Earth rotation
and intercomparison of the techniques
(MERIT)
1983- 1984 – Właściwa kampania MERIT
1984 – Wprowadzenie ziemskiego układu odniesienia
WGS84
1989 – Rozpoczęcie pracy przez służbę
IERS
wykorzystującą
obserwacje: GPS, laserowe, Doris i VLBI do wyznaczenia
parametrów ruchu obrotowego Ziemi
1991 – Zdefiniowanie przez IUGG umownego ziemskiego
systemu odniesienia
CTRS
. Monitorowanemu przez IERS
systemowi CTRS nadano nazwę Międzynarodowego
Ziemskiego Systemu Odniesienia
ITRS
1993 – Powołanie International GPS Service (
IGS
) – (od 2004
International Earth Rotation and Reference Systems
Service
ZIEMSKIE GLOBALNE SYSTEMY ODNIESIENIA I ICH
REALIZACJE
Lokalne i regionalne układy odniesienia
przed rozwinięciem się satelitarnych i kosmicznych
technik pomiarowych (1)
Położenie środka elipsoidy odniesienia względem środka masy
Ziemi
Przyłożenie jednopunktowe (
B=φ, L=λ, A=a, N=0
)
Przyłożenie wielopunktowe (elipsoida najlepiej dopasowana
do obszaru)
∑N
2
= min
Oba rozwiązania prowadzą do przypadkowej wartości
przesunięcia środka elipsoidy względem środka masy Ziemi.
Powstawały więc różne systemy odniesienia dla każdego kraju,
lub ich grupy (lokalne, lub regionalne
)
Orientacja geodezyjnego układu odniesienia względem osi obrotu
Ziemi
•
równoległość
osi obrotu elipsoidy odniesienia do osi obrotu
Ziemi (równanie Laplace’a)
• określenie
południka zerowego
ZIEMSKIE GLOBALNE SYSTEMY ODNIESIENIA I ICH
REALIZACJE
Lokalne i regionalne układy odniesienia
przed rozwinięciem się satelitarnych i kosmicznych
technik pomiarowych (2)
Europejski układ odniesienia ED-50
Przed drugą wojną światową rozpoczęto prace nad
ujednoliceniem geodezyjnego układu odniesienia w Europie
Po drugiej wojnie światowej opracowano łącznie triangulacje
krajów Europy Zachodniej prace koordynowała powołana przez
IAG Komisja
RETrig
(Commission for the Adjustment of the
European Trianulation)
Łączne opracowanie dało nowy układ odniesienia
ED-50
ED-50
elipsoida Hayforda 1924
punkt przyłożenia
Poczdam
Komisja RETrig pracuje nad opracowaniem nowego układu
odniesienia
ED-87
wykorzystującego satelitarne obserwacje
dopplerowski (prace nie zostały zakończone)
W czasie XIX Zgromadzenia Generalnego Międzynarodowej Unii
Geodezji i Geofizyki (IUGG) 1987 Vancouver powołano w ramach
Komisji X IAG nową permanentną Podkomisję
EUREF
zastępującą
podkomisję RETrig, której zadaniem było opracowanie nowego
układu odniesienia dla Europy z wykorzystaniem satelitarnych i
kosmicznych technik pomiarowych w tym GPS
ZIEMSKIE GLOBALNE SYSTEMY ODNIESIENIA I ICH
REALIZACJE
Systemy odniesienia WGS-72 i WGS-84, GRS-80 (1)
World Geodetic System 1972
(WGS-72)
Światowy
System
Odniesienia
WGS72
był
trzecim
geocentrycznym układem odniesienia opracowanym przez US
DMA Agencję Kartograficzną Ministerstwa Obrony Stanów
Zjednoczonych Ameryki Północnej - poprzednie wersje WGS60 i
WGS66. Przed
27 stycznia 1989
roku był używany przez
GPS
i
Dopplerowski system
TRANSIT
. Praktyczna jego realizacja
następowała poprzez sieć stacji śledzących systemu TRANSIT
(TRANET).
ZIEMSKIE GLOBALNE SYSTEMY ODNIESIENIA I ICH
REALIZACJE
Systemy odniesienia WGS-72 i WGS-84, GRS-80 (2)
World Geodetic System 1984
(WGS-84)
Układ odniesienia WGS84 był początkowo oparty o współrzędne
satelitarne uzyskane tylko z pomiarów dopplerowskich (system
TRANSIT) i bazował na układzie WGS72, który został
opracowany dla potrzeb systemu TRANSIT. Podejście to
pozwoliło na stworzenie globalnie jednorodnego układu
odniesienia o dokładności rzędu 1-2 m
Współrzędne dziesięciu stacji śledzących systemu GPS zostały
poprawione przez użycie kilkutygodniowych obserwacji GPS z
globalnej sieci IGS (22 stacje), wykorzystano w procesie
wyznaczania
współrzędnych,
jak
również
poprawienia
pokładowych orbit satelitarnych.
W opracowaniu wyników pomiarów przyjęto standardy zgodne z
zaleceniami IERS. Wynikiem prac był nowy poprawiony układ
WGS84(G730) – co odnosi się do 730-go tygodnia GPS.
Nowy układ charakteryzuje się dokładnością 10cm w skali
globalnej
Od początku 1994r DMA (obecnie NIMA) wykorzystuje układ
WGS84(G730) do obliczania orbit satelitów GPS (efemeryd
pokładowych).
ZIEMSKIE GLOBALNE SYSTEMY ODNIESIENIA I ICH
REALIZACJE
Systemy odniesienia WGS-72 i WGS-84, GRS-80 (3)
Geodetic System 1980 (GRS-
80)
Geodezyjny System Odniesienia
GRS’80
został przyjęty na XIV
Zgromadzeniu Generalnym Międzynarodowej Unii Geodezji i
Geofizyki (
IUGG
) w grudniu
1979
roku w Canberze.
Jego elementami były parametry geocentrycznej elipsoidy: a,
GM i J
2
oraz prędkość kątowa Ziemi.
Przyjęto,że mała półoś elipsoidy odniesienia systemu GRS’80
będzie równolegla do osi CIO, a płaszczyzna południka
zerowego będzie równoległa do południka zerowego
średniego Obserwatorium BIH.
Praktyczną realizację tak przyjętego układu współrzędnych
można oszacować na około 10 cm.
ZIEMSKIE GLOBALNE SYSTEMY ODNIESIENIA I ICH
REALIZACJE
Służba IERS i jej rola w tworzeniu
i konserwacji ziemskich układów odniesienia(1)
Międzynarodowa Służba Ruchu Obrotowego Ziemi (IERS)
została
powołana
przez
Międzynarodową
Unię
Astronomiczną (IAU) i Międzynarodową Unię Geodezji i
Geofizyki w 1987 roku.
W 2003 roku została przemianowana na Międzynarodową
Służbę Ruchu Obrotowego Ziemi i Systemów Odniesienia
(International Earth Rotation and Reference Systems
Service).
Do zadań należą:
•Definicja Międzynarodowego Niebieskieo Sstemu Odniesienia
(ICRS) i jego realizacja w postaci układu współrzędnych (ICRF).
•Definicja Międzynarodowego Ziemskiego Sstemu Odniesienia
(ITRS) i jego realizacja w postaci układu współrzędnych (ITRF).
•Wyznaczenie parametrów orientacji Ziemi (EOP) i ich zmian dla
zapewnienia parametrów transformacji pomiędzy ICR i ITRF.
•Analiza danych geofizycznych dla interpretacji zmian ICRF, ITRF,
EOP i ich modelowanie.
•Standardy, stałe i modele (konwencje).
ZIEMSKIE GLOBALNE SYSTEMY ODNIESIENIA I ICH
REALIZACJE
Służba IERS i jej rola w tworzeniu
i konserwacji ziemskich układów odniesienia(2)
Międzynarodowa Służba Ruchu Obrotowego Ziemi i
Systemów Odniesienia (International Earth Rotation and
Reference Systems Service) posiada następujące służby
obserwacyjne i opracowania danych dla poszczególnych
technik:
o Międzynarodowa Służba GPS (IGS)
o Międzynarodowa Służba Pomiarów Laserowych Odległości
(ILRS)
o Międzynarodowa Służba VLBI (IVS)
o Międzynarodowa Służba DORIS (IDS)
ZIEMSKIE GLOBALNE SYSTEMY ODNIESIENIA I ICH
REALIZACJE
DX
DY
DZ
RX
RY
RZ
Skala
RMS
[cm]
[c
m]
[cm
]
[mas]
[mas]
[mas]
[ppm]
[cm]
NAD83
-94
19
8
54
27.5
15.5
10.7
-
0.005
0
2
WGS84
-6
+5
2
+2
2
-18.4
-0.3
-7.0
0.011
0
<200
WGS84-
GPS
-4
-1
-28
4.2
-4.0
-15.6
-
0.218
0
94
WGS730
0
-3
4
-2.6
-2.5
-0.4
0.000
0
6
ITRF’93
0.2
0.7
0.7
-0.39
0.8
-0.96
0.001
2
<1
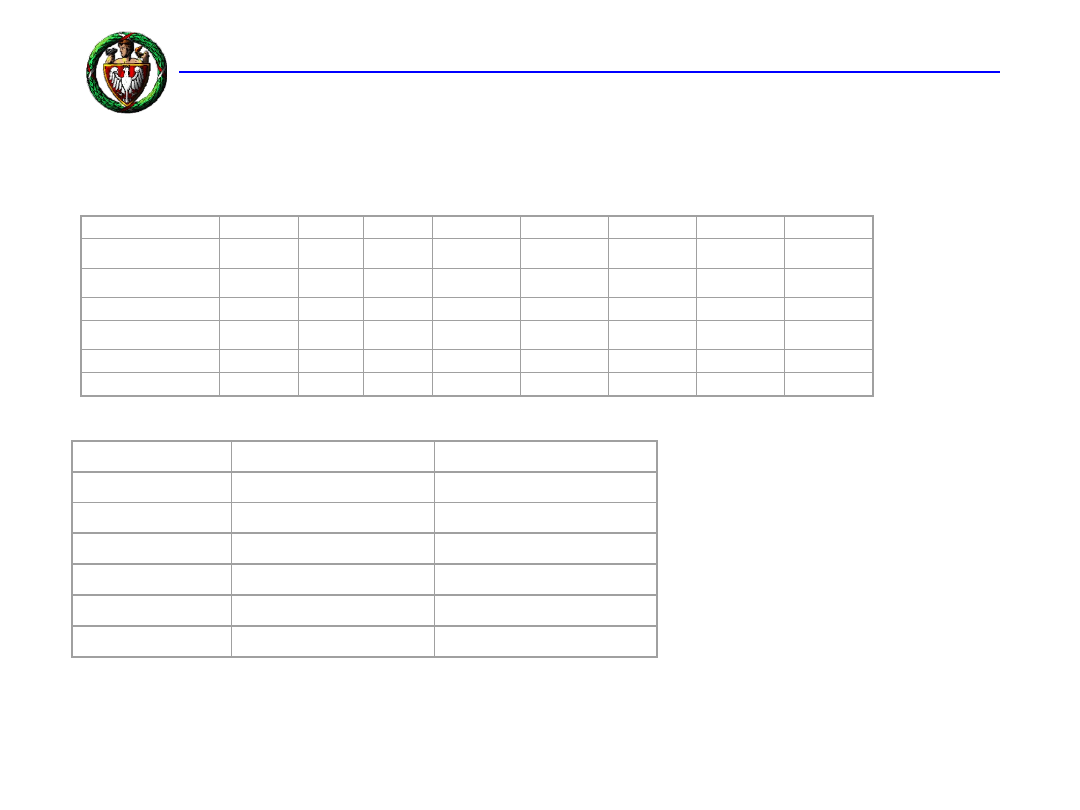
Realizacja
układu
Początek (tydzień
GPS)
Koniec(tydzieńGPS)
ITRF92
Jan 2, 1994 (730)
Dec 31, 1994 (781)
ITRF93
Jan 1, 1995 (782)
Jun 29, 1996 (859)
ITRF94
Jun 30, 1996 (860)
Feb 28, 1998 (946)
ITRF96
Mar 1, 1998 (947)
Jul 31, 1999 (1020)
ITRF97
Aug 1, 1999 (1021)
Dec 1, 2001 (1042)
ITRF2000
Dec 2, 2001 (1043)
-----------------------
Z
Y
X
s
s
s
T
T
T
Z
Y
X
z
y
x
x
y
x
z
y
z
z
y
x
x,y,z - współrzędne wyznaczane,
X,Y,Z - współrzędne w układzie ITRF,
T
x
,T
y
,T
z
- przesunięcie pomiędzy środkami
układów,
S - zmiana skali
składowe orientacji
przestrzennej
.
, ,
w w w
x
y
z
ITRF’88 – ITRF’2000
przegląd parametrów transformacji i ich skutki
praktyczne(1)
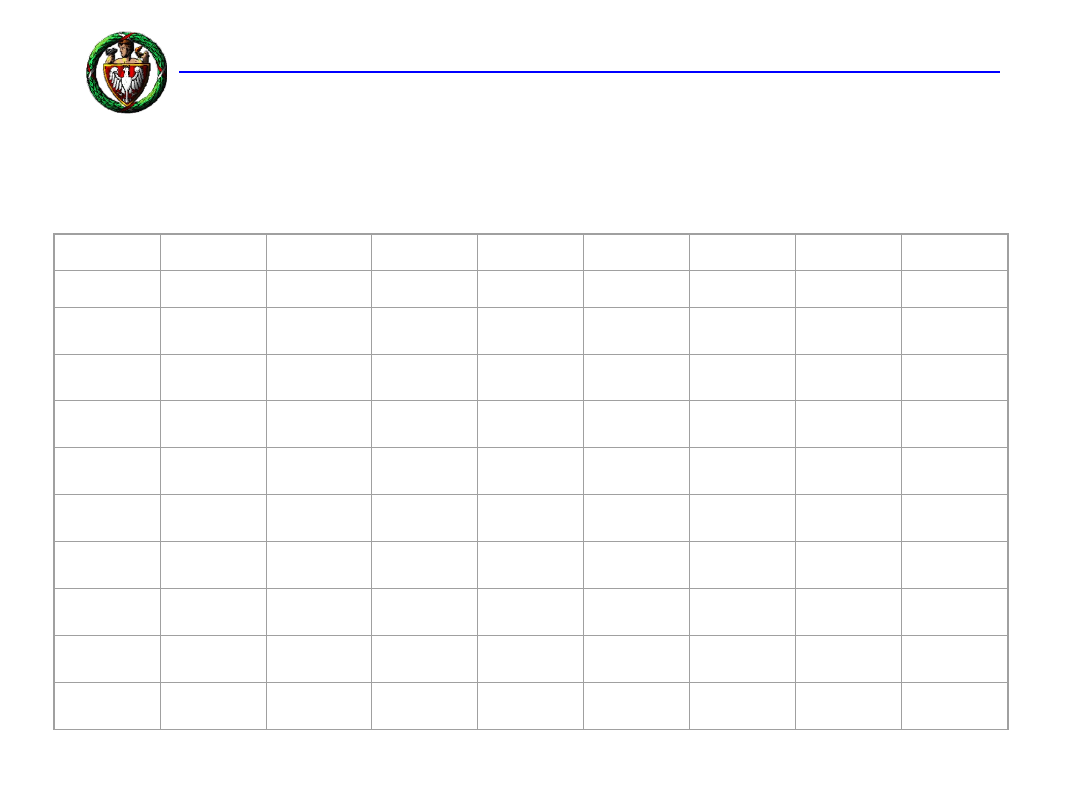
ZIEMSKIE GLOBALNE SYSTEMY ODNIESIENIA I ICH
REALIZACJE
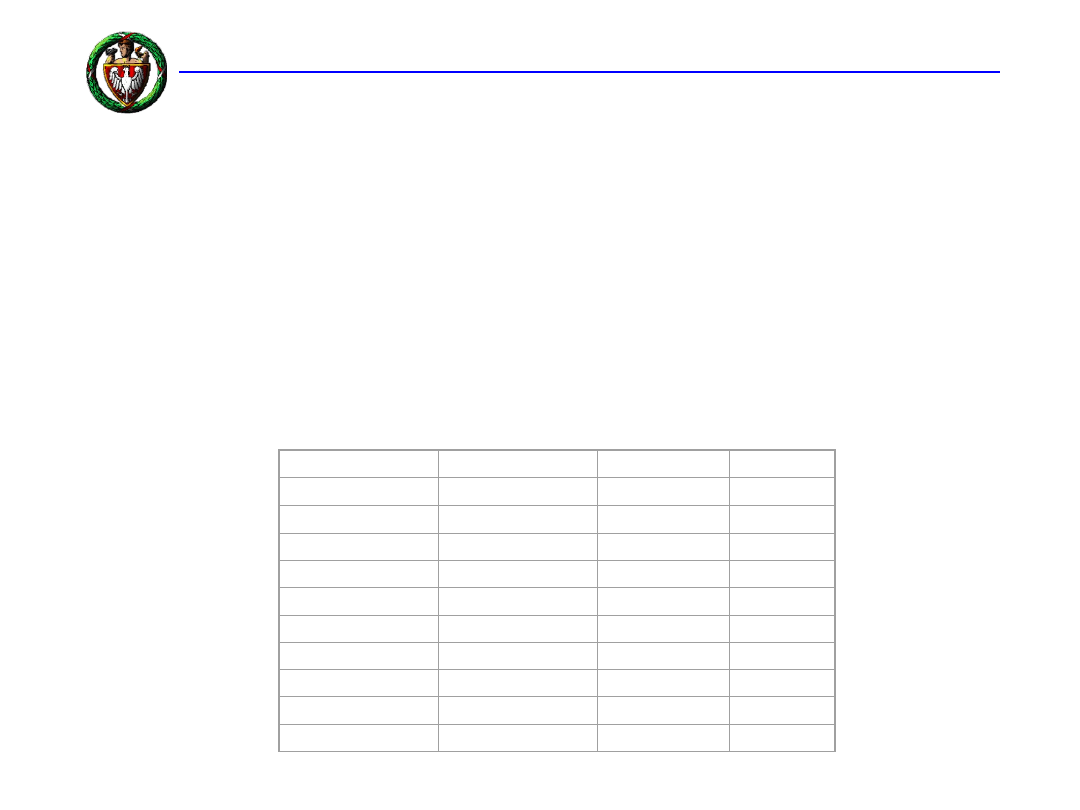
ITRF’88 – ITRF’2000
przegląd parametrów transformacji i ich skutki
praktyczne(2)
X
Y
Z
Układ
T
x
T
y
T
z
s
epoka
[cm]
[cm]
[cm]
ppb
0.001”
0.001”
0.001”
ITRF9
7
0.67
0.61
-1.85
1.55
0.00
0.00
0.00
1997
ITRF9
6
0.67
0.61
-1.85
1.55
0.00
0.00
0.00
1997
ITRF9
4
0.67
0.61
-1.85
1.55
0.00
0.00
0.00
1997
ITRF9
3
1.27
0.65
-2.09
1.95
-0.39
0.80
-1.14
1988
ITRF9
2
1.47
1.35
-1.39
0.75
0.00
0.00
-0.18
1988
ITRF9
1
2.67
2.75
-1.99
2.15
0.00
0.00
-0.18
1988
ITRF9
0
2.47
2.35
-3.59
2.45
0.00
0..0
-0.18
1988
ITRF8
9
2.97
4.75
-7.39
5.85
0.00
0.00
-0.18
1988
ITRF8
8
2.47
1.15
-9.79
8.95
0.10
0.00
-0.18
1988
ZIEMSKIE GLOBALNE SYSTEMY ODNIESIENIA I ICH
REALIZACJE
Wektory prędkości –model NUVEL-1A
Brak zaznaczenia
ZIEMSKIE GLOBALNE SYSTEMY ODNIESIENIA I ICH
REALIZACJE
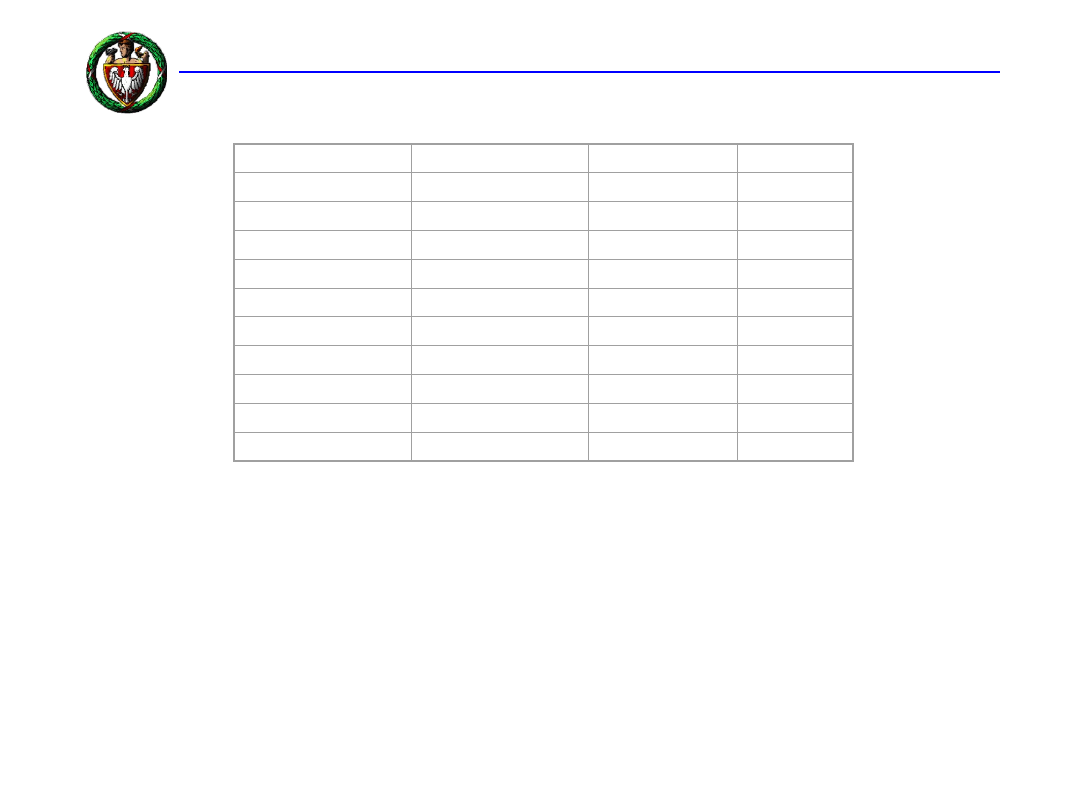
ETRF-89 jako podzbiór układu ITRF (1)
0
0
t
t
V
t
X
t
X
c
ITRF
ITRF
c
ITRF
0
.
1989
0
0
0
89
89
89
c
ITRF
ITRF
ITRF
x
y
x
z
y
z
z
y
x
ITRF
ITRF
ITRF
ETRF
ETRF
ETRF
t
Z
Y
X
T
T
T
Z
Y
X
Z
Y
X
c
ETRF
c
ETRF
ETRF
t
V
t
X
X
0
.
1989
0
.
1989
X
T
Y
T
Z
T
ITRF
[cm]
[cm]
[cm]
89
0
0
0
90
1.9
2.8
-2.3
91
2.1
2.5
-3.7
92
3.8
4.0
-3.7
93
1.9
5.3
-2.1
94
4.1
4.1
-4.9
96
4.1
4.1
-4.9
97
4.1
4.1
-4.9
00
5.4
5.1
-4.8
ZIEMSKIE GLOBALNE SYSTEMY ODNIESIENIA I ICH
REALIZACJE
ETRF-89 jako podzbiór układu ITRF (2)
x
y
z
ITRF
[mas/y]
[mas/y]
[mas/y]
89
0.110
0.570
-0.710
90
0.110
0.570
-0.710
91
0.210
0.520
-0.680
92
0.210
0.520
-0.680
93
0.320
0.780
-0.670
94
0.200
0.500
-0.650
96
0.200
0.500
-0.650
97
0.200
0.500
-0.650
00
0.081
0.490
-0.792
3661
.
5009571
8388
.
1409153
2035
.
3664940
ITRF
ITRF
ITRF
Z
Y
X
0
.
1989
0
000081
.
0
00049
.
0
000081
.
0
0
000792
.
0
00049
.
0
000792
.
0
0
048
.
0
051
.
0
054
.
0
89
89
89
c
ITRF
ITRF
ITRF
ITRF
ITRF
ITRF
ETRF
ETRF
ETRF
t
Z
Y
X
Z
Y
X
Z
Y
X
2019
.
5009571
6612
.
1409153
5042
.
3664940
ETRF
ETRF
ETRF
Z
Y
X
ZIEMSKIE GLOBALNE SYSTEMY ODNIESIENIA I ICH
REALIZACJE
Przestrzenne systemy odniesienia używane w Polsce
(1)
Niesatelitarne Systemy odniesienia stosowane
w Polsce.
Układ Borowa Góra 1925 (BG1925), określany w zagranicznych
źródłach jako PND1925 (Polish National Datum) powstał w
wyniku przyłożenia elipsoidy Bessel’1841 do Geoidy w Borowej
Górze. Orientacji elipsoidy dokonano przy pomocy azymutu na
wieżę w Modlinie. Przyjęto następujące współrzędne tego
punktu (szerokość i długość geograficzną wynikającą z
pomiarów astronomicznych:
B = 52
o
28’32.85”
L = 21
o
02’12.12”
W Polsce, podobnie jak w innych państwach byłego układu
warszawskiego,
obowiązywała
od
roku
1952
elipsoida
KRASOWSKIEGO z punktem przyłożenia do geoidy w Pułkowie
Do połowy lat 60 tych obowiązywał w Polsce układ
współrzędnych zwany krótko „1942”.
ZIEMSKIE GLOBALNE SYSTEMY ODNIESIENIA I ICH
REALIZACJE
Przestrzenne systemy odniesienia używane w Polsce
(2)
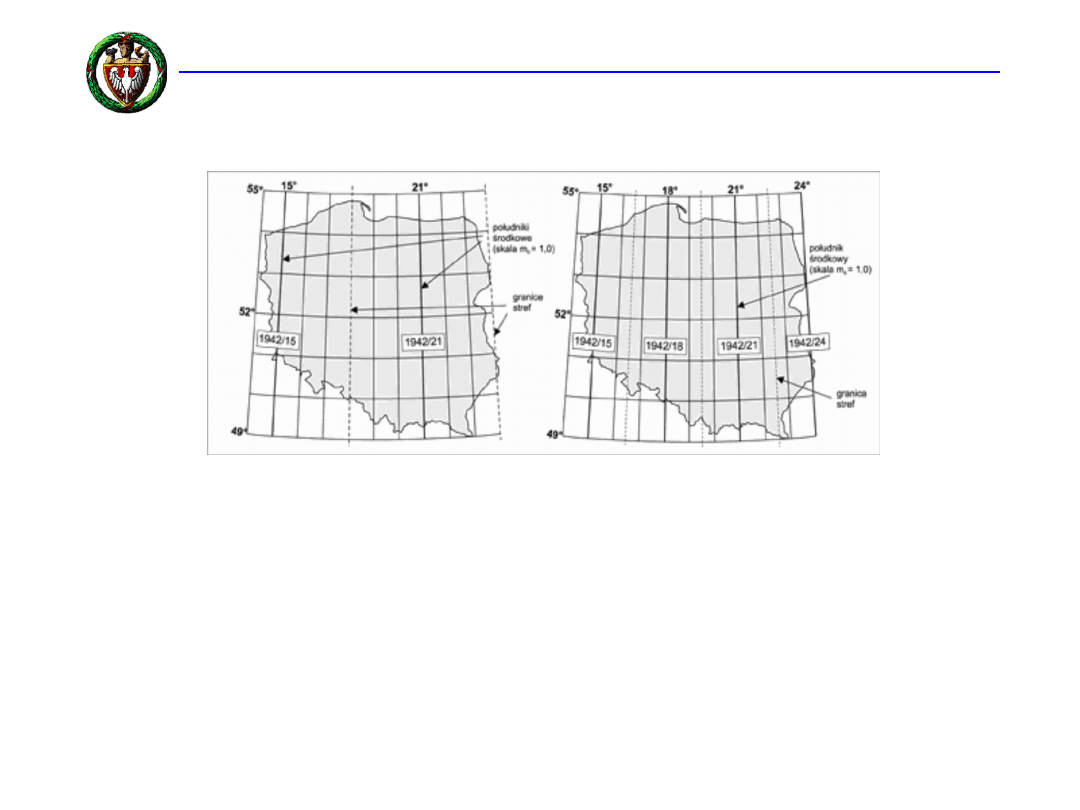
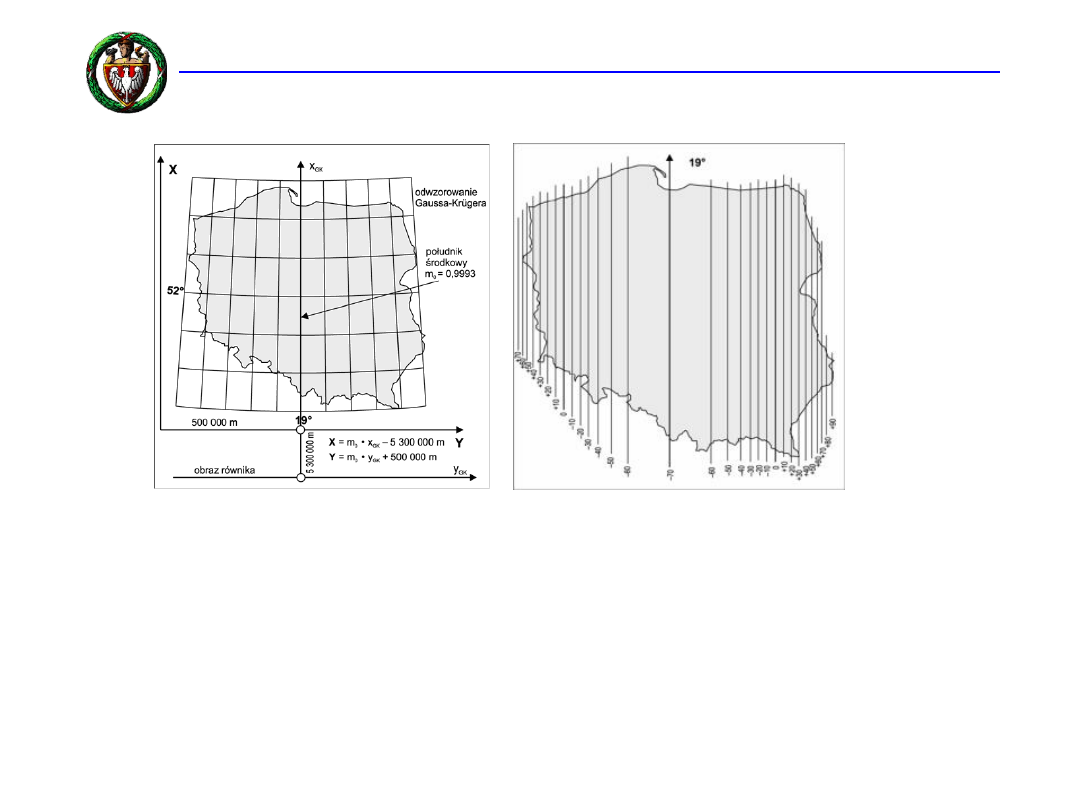
W latach 60-tych w cywilnej służbie geodezyjnej zaczto
wprowadza nowy, 5-cio strefowy układ odwzorowawczy,
który
nazywany
został
układem
„1965”
(oficjalnie
wprowadzony w 1968r.). Podstawę jego stanowił ten sam co
w układzie 1942 system elipsoidalny. Obszar państwa
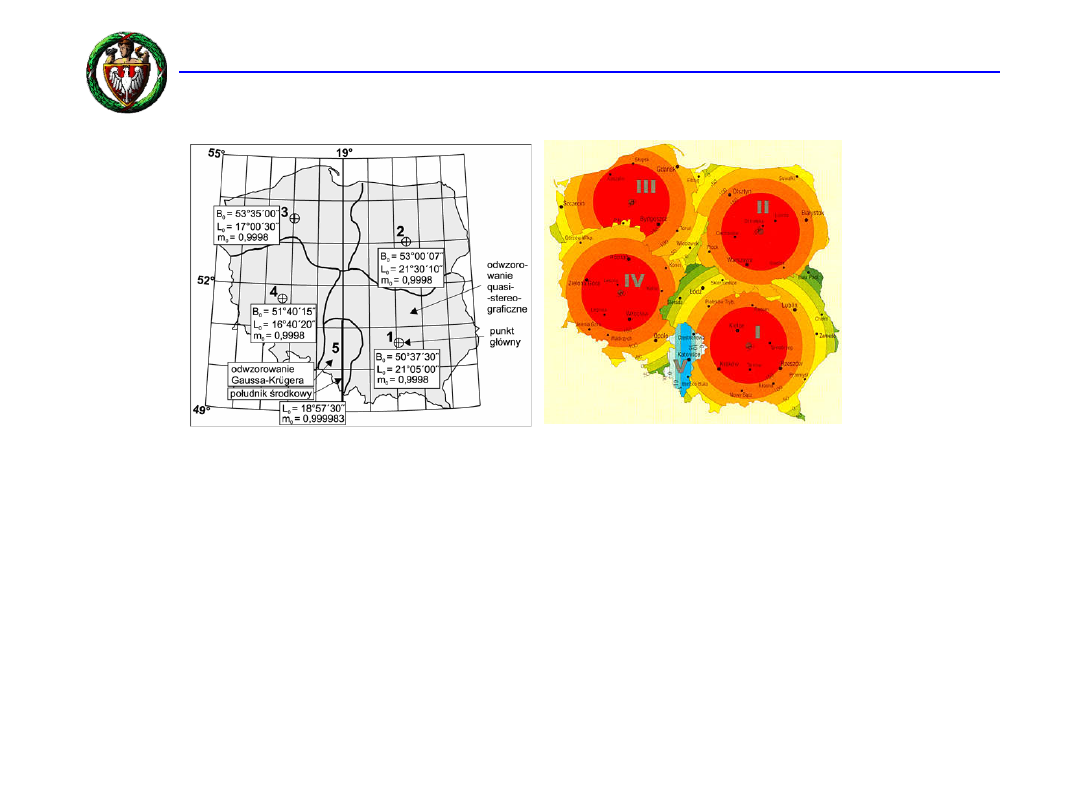
polskiego podzielono na pięć stref odwzorowawczych (rys.
2), przy czym w strefach 1, 2, 3, 4 zastosowano tzw.
odwzorowanie quasi-stereograficzne (Roussilhe projection),
natomiast w strefie 5 zmodyfikowane odwzorowanie
Gaussa
Krugera.
ZIEMSKIE GLOBALNE SYSTEMY ODNIESIENIA I ICH
REALIZACJE
Przestrzenne systemy odniesienia używane w Polsce
(3)
Zniekształcenia odwzorowawcze w każdej strefie układu mieszczą
się w zakresie od 20cm/km do -20cm/km. Układ „1965” był
przeznaczony głównie do tworzenia i mapy zasadniczej.Natomiast
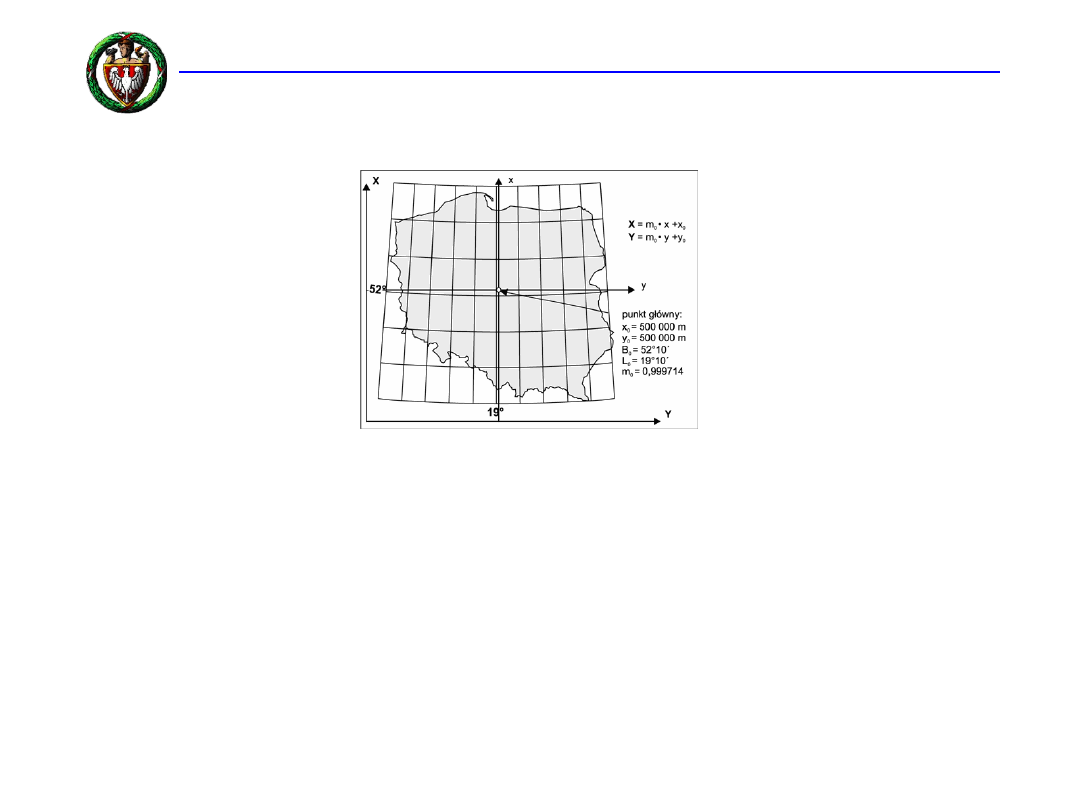
dla map przeglądowych w skalach 1:100 000 i mniejszych przyjto
układ
oparty
na
jednostrefowym
odwzorowaniu
quasi-
stereograficznym obszaru Polski nazwany GUGiK80 (rys. 3) .Punkt
główny
odwzorowania
(punkt
styczności
płaszczyzny
odwzorowawczej z elipsoidą ) był umiejscowiony w geometrycznym
„środku” obszaru Polski (B
0
= 5210’, L
0
= 1910’). Współczynnik
zmiany skali w tym punkcie wynosi 0.999714, a maksymalne
zniekształcenie liniowe na granicach Polski wynosi ~ 93 cm/km.
Układ ten znalazł zastosowanie jedynie przy opracowaniu
wydawanej w latach 1980-1984 topograficznej mapy Polski w skali
1:100000.
ZIEMSKIE GLOBALNE SYSTEMY ODNIESIENIA I ICH
REALIZACJE
Przestrzenne systemy odniesienia używane w Polsce
(4)
Układ GUGiK 80 (odwzorowanie quasi
stereograficzne)
ZIEMSKIE GLOBALNE SYSTEMY ODNIESIENIA I ICH
REALIZACJE
Przestrzenne systemy odniesienia używane w Polsce
(5)
Układ 1992
ZIEMSKIE GLOBALNE SYSTEMY ODNIESIENIA I ICH
REALIZACJE
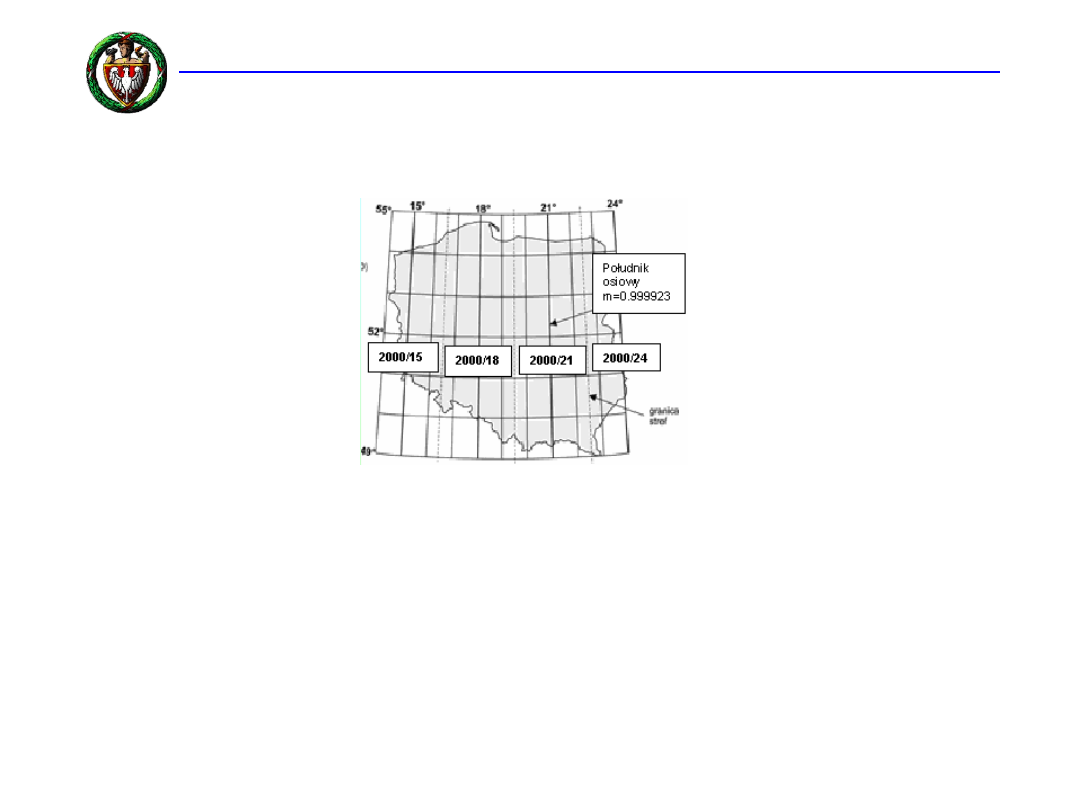
Przestrzenne systemy odniesienia używane w Polsce
(6)
Układ 2000
ZIEMSKIE GLOBALNE SYSTEMY ODNIESIENIA I ICH
REALIZACJE
Podsumowanie sugestie i wnioski
Treść referatu
ZIEMSKIE GLOBALNE SYSTEMY ODNIESIENIA I ICH
REALIZACJE
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
Wyszukiwarka
Podobne podstrony:
1 System bankowy rondoid 9886 ppt
państwowy system odniesień przestrzennych
Państwowy system odniesień przestrzennych [8 sie 2000]
Cierpiałkowska Koncepcje interakcyjne i systemowe oraz ich znaczenie dla psychologii klinicznej
Systemy operacyjne i ich ewolucja
Zadania realizowane przez powiaty oraz wysokość środków finansowych przeznaczona na ich realizację w
w sprawie szczegółowego zakresu i kierunków działań Agencji Restrukturyzacji i Modernizacji Rolnictw
15 System odniesień przestrzennych w Polsce (główne założenia i podstawa prawna)
W2 Systemy odniesie˝ przestrzennych
W2 Systemy odniesień przestrzennych
14 SYSTEMY UPRAWY ROSLINid 15278 ppt
19 System edukacji w Polsceid 18198 ppt
Globalne systemy rezerwacji w turystyce 2010
06 Klasy systemow MRP ERPid 6315 ppt
W2 Systemy odniesieTŁ przestrzennych
systemy odniesień przestrzennych
04 systemy pamięci krótkotrwałejid 4865 ppt
Systemy płac i ich porównanie, Pomoc w nauce, Ekonomika przedsiębiorstwa
więcej podobnych podstron