Sterowniki programowalne
PLC
1
Definicja i zadania (1)
Sterowniki programowalne (PLC, ang.
Programmable Logic Controllers) są komputerami
przemysłowymi, które pod kontrolą systemu
operacyjnego czasu rzeczywistego:
• zbierają pomiary za pomocą modułów wejściowych z
czujników cyfrowych i analogowych oraz urządzeń
pomiarowych,
• korzystając z uzyskanych danych o sterowanym
procesie lub maszynie, wykonują programy
użytkownika, zawierające zakodowane algorytmy
sterowania i przetwarzania danych,
• generują sygnały sterujące odpowiednie do wyników
obliczeń tych programów i przekazują je przez moduły
wyjściowe do elementów i urządzeń wykonawczych,
2
Definicja i zadania (2)
a ponadto mają możliwość:
• transmitowania danych za pomocą
modułów i łączy komunikacyjnych,
• realizacji funkcji diagnostyki programowej i
sprzętowej.
Wartości pomiarów zmiennych procesowych
stanowią wejścia sterownika, obliczone zmienne
sterujące są jego wyjściami.
3

Definicja wg normy IEC
61131-1
„cyfrowy system elektroniczny do stosowania w
środowisku przemysłowym, który posługuje się
pamięcią programowalną do przechowywania
zorientowanych na użytkownika instrukcji w celu
sterowania przez cyfrowe lub analogowe wejścia
i wyjścia szeroką gamą maszyn i procesów"
Zarówno sterownik, jak i związane z nim
urządzenia peryferyjne są przeznaczone do
łatwego połączenia
w przemysłowy system sterowania.
4

Czy nazwa PLC jest
poprawna
Występowanie w angielskiej nazwie słowa
logic ma już dzisiaj znaczenie historyczne,
ponieważ współczesne sterowniki
programowalne, oprócz typowych zadań
sterowania logicznego (tzn. dwustanowego),
wykonują także wiele innych działań, czy to w
zakresie bezpośredniej regulacji cyfrowej (DDC,
Digtal Direct Control), czy przetwarzania danych
lub funkcji komunikacyjnych.
Ponieważ skrót PC kojarzy się powszechnie z
komputerami osobistymi (Personal Computer),
stąd będzie używany skrót PLC na oznaczenie
sterowników programowalnych, zamiast
stosowanego w normie IEC 61131 skrótu PC,
odpowiadającego Programmable Controller.
5

Porównanie sterowania prze-
kaźnikowego i
sterownikowego
6
Rys historyczny –
założenia projektowe
W roku 1968 w firmie General Motors
grupa inżynierów rozpoczęła prace
projektowe nad sterownikami,
przyjmując następujące założenia:
1. Łatwość programowania i
przeprogramowania, stosownie do
zmieniających się warunków pracy.
2. Łatwość utrzymania w ruchu produkcyjnym, z
możliwością napraw przez wymianę
instalowanych modułów (plug-in modules).
3. Większa niezawodność w warunkach
przemysłowych, przy mniejszych gabarytach
niż sprzęt przekaźnikowy.
4. Koszty porównywalne ze stosowanymi
panelami przekaźnikowymi i szafami
sterowniczymi.
7

Modicon
(MOdular DIgital
CONtroller)
Za pierwszy
sterownik jest
uznawany,
zaprojektowany przez
Dicka Morleya w
1969 r., Modicon
W 1976 roku wprowadzono sterowniki PLC
wyposażone w kasety sterowania zdalnego, które
umożliwiły monitorowanie i uaktualnianie dużej
liczby punktów wejść i wyjść (I/O, Input/Output)
za pomocą połączeń komunikacyjnych, przy
odległościach nawet do kilkuset metrów od
jednostki centralnej sterownika.
8
Historia c.d.
W 1977 roku firma Allen-Bradley jako
pierwsza zastosowała w sterownikach
PLC mikroprocesor 8080 z
wykorzystaniem dodatkowego
koprocesora dla operacji bitowych.
Z początkiem lat osiemdziesiątych XX w. zaczęto
w sterownikach wprowadzać moduły
inteligentne, które - wyposażone we własne
procesory – mogły realizować znacznie bardziej
złożone funkcje obliczeniowe. Sterowniki PLC
zaczęły także zastępować nie tylko
przekaźnikowe układy sterowania logicznego,
lecz także regulatory analogowe, a nawet
mikrokomputery.
9
Historia c.d.
W połowie lat osiemdziesiątych XX w.
rynek sterow-ników gwałtownie się
rozszerzył, gdy w ofercie kilku japońskich
producentów pojawiły się małe sterowniki
o sporych możliwościach funkcjonalnych, a
przy tym dużo tańsze niż sterowniki
oferowane dotychczas.
Rozwój sterowników PLC był stymulowany
przede wszystkim koniecznością szybkiego
reagowania na zmiany wymagań aplikacyjnych
dzięki możliwościom przeprogramowania, bez
potrzeby zmian sprzętowych.
10
Przyczyny popularności
PLC
• łatwość programowania z użyciem języka schematów
drabinkowych, podobnego do klasycznych schematów
stykowo-przekaźnikowych,
• zwiększenie niezawodności komputerów
przemysłowych na tyle, aby mogły działać w
zanieczyszczonym środowisku,
• wprowadzenie programowej kontroli obwodów
wejściowych
i wyjściowych oraz innych możliwości diagnostyki
systemowej
i obiektowej,
• zapewnienie komunikacji z gniazdami przemysłowymi,
panelami operatorskimi, wyświetlaczami, komputerami
osobistymi oraz innymi urządzeniami stanowiącymi
łącze operatora (MMI, Man Machine Interface
).
Na oznaczenie urządzeń stanowiących łącze operatora
jest także używany skrót HMI (Human Machine
Interface)
.
11

Rodziny sterowników
• mogą być programowane w tym samym
języku
i z użyciem tego samego pakietu
programowego,
• mają takie same zmienne programowe
oraz taką samą strukturę modułów I/O
(moduły, płyty łączeniowe, drajwery, kable
łączeniowe itp.),
• istnieje możliwość przenoszenia
programów między modelami oraz
korzystania z tych samych opcji
w każdym modelu.
12
Systemy SCADA – funkcje
• komunikacja z urządzeniami obiektowymi,
takimi jak sterowniki, regulatory,
• zbieranie i przetwarzanie zmiennych
procesowych pochodzących z urządzeń
obiektowych oraz ich archiwizacji
w bazie danych,
• interfejs operatora (MMI) służącego do
wizualizacji procesu
i jego obsługi (sterowanie ręczne, zmiany
wielkości zadanych),
• wizualizacji wartości zmiennych procesowych
(aktualnych
i historycznych) w różnych formach graficznych,
• opracowania raportów dotyczących bieżącego
stanu procesu, zużycia materiałów oraz stanu
pracy maszyn i urządzeń,
Supervisory Control And Data
Acquisition
- sterowanie nadrzędne i
zbieranie danych
13

Systemy SCADA – funkcje
cd.
• generowania sygnałów alarmowych związanych
z przekroczeniem wartości granicznych,
• wypracowania danych dla warstw sterowania
operacyjnego produkcją oraz warstwy
zarządzania,
• diagnostyki zasobów, komunikacji i
ewentualnie redundancji.
14
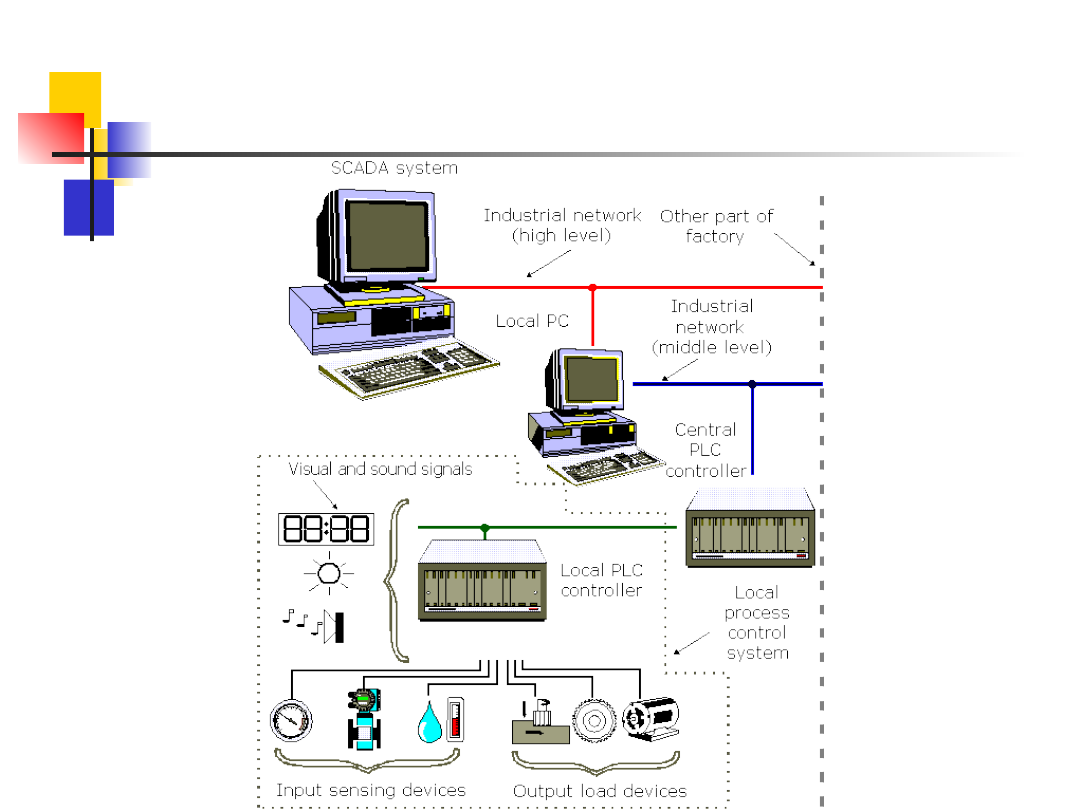
System SCADA – schemat
15
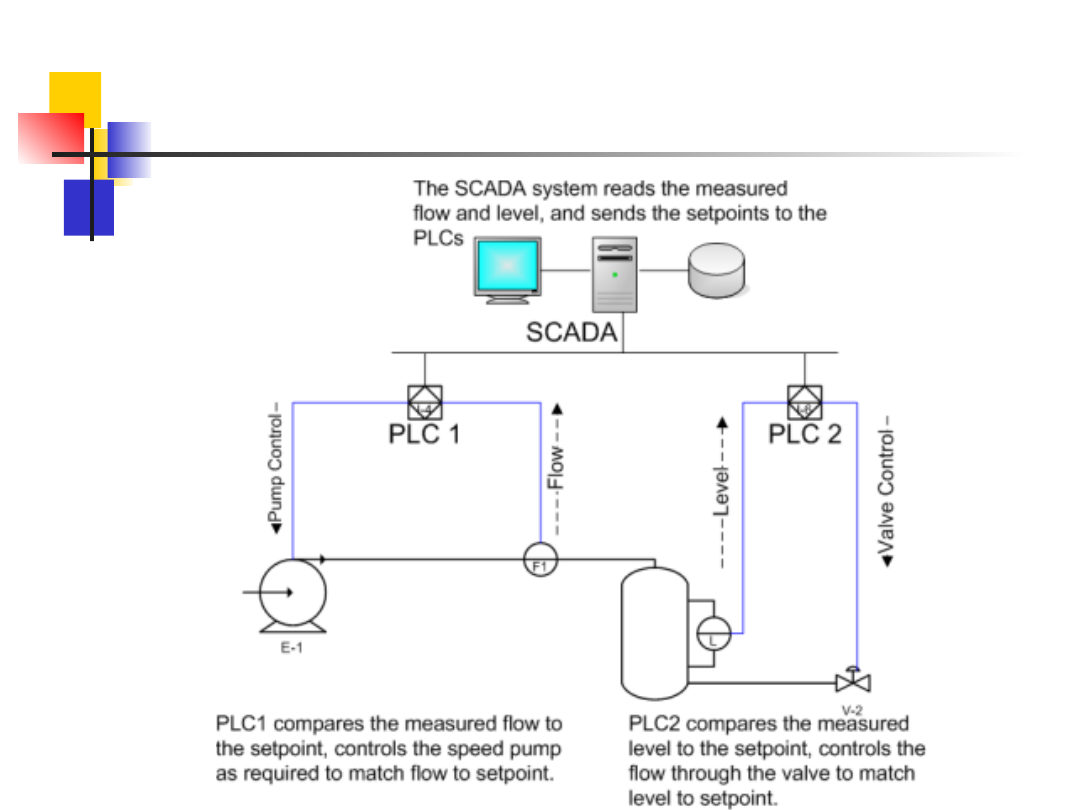
Fragment systemu SCADA na
poziomie procesu
System SCADA odczytuje
mierzone natężenie
przepływu i poziom oraz
określa wartości zadane w
sterownikach PLC
PLC1 porównuje
zmierzone
natężenie
przepływu z
wartością zadaną,
steruje prędkość
obrotową pompy,
tak aby dopasować
ją do wartości
zadanej
Sterowanie
pompą
Natężeni
e
przepływ
u
Pozio
m
Sterowani
e zaworem
PLC2 porównuje
zmierzony
poziom
przepływu z
wartością
zadaną,
steruje
natężeniem
strumienia przez
zawór, tak aby
dopasować go do
wartości zadanej
16
Redundancja układów
W celu polepszenia niezawodności systemów
sterownikowych wielu producentów wprowadziło
sprzętowe i programowe rozwiązania
redundancyjne.
Rozwiązanie takie polega na wprowadzeniu w warstwie obiektowej
rezerwowych
czujników
oraz
elementów
sterowania
organami
wykonawczymi. Podobnie w warstwie komunikacji stosuje się rezerwowe
moduły
komunikacyjne
oraz
okablowanie
sieciowe,
uzupełnione
odpowiednim oprogramowaniem, które zapewniają ciągłe utrzymywanie
połączenia w sieci - podstawowego, a w razie awarii - rezerwowego. W
warstwie sterownikowej natomiast pracują co najmniej dwie jednostki
centralne, między którymi zapewnia się wymianę danych w każdym cyklu
programowym. W systemach z gorącą rezerwą jednostki centralnej (Hot
Standby
CPU
Redundancy)
zapewnia
się
wymianę
i porównanie obrazu procesu oraz realizację jednakowych programów
aplikacyjnych,
a następnie porównanie wyników obliczeń i sprawdzenie ich zgodności, po
czym przekazuje się te obliczone sterowania przez moduły komunikacyjne i
moduły wyjściowe do organów wykonawczych.
17

Systemy ESD
W aplikacjach krytycznych wprowadza się z kolei tzw.
systemy ESD (Emergency Shutdown Systems),
zapewniające bezpieczne zamykanie awaryjnych cykli
produkcyjnych. Systemy takie zazwyczaj wykorzystują
potrójną rezerwę, tzn. występują w nich trzy jednostki
centralne, podłączone przez potrojone magistrale
komunikacyjne do oddalonych bloków wejść i wyjść.
W systemach tych stosuje się oprogramowanie
przeprowadzające głosowanie, np. „dwa z trzech",
którego wynikiem są odpowiednie i pewne wartości
sygnałów sterujących.
18
Moduły inteligentne
Moduły inteligentne (hardware) są to złożone, dedykowane
układy sterowania, które jednak w prosty sposób można
włączyć do magistrali sterowników lub do ich sieci
komunikacyjnych. Mogą to być moduły systemów ważenia i
dozowania, mierników elektrycznych z rozbudowanymi
algorytmami obróbki sygnałów pomiarowych itp.
W latach dziewięćdziesiątych XX w. nastąpiło znaczne
powiększenie asortymentu modułów inteligentnych (Intelligent
Modules), wyposażonych we własne układy mikroprocesorowe,
które realizują nieraz bardzo złożone algorytmy przetwarzania
sygnałów i procedury sterowania oraz komunikacji.
Najszerzej są tu stosowane moduły szybkich liczników (HSC, High
Speed Counter) oraz moduły pozycjonowania osi napędów (APM,
Axis Positioning Module), które są przystosowane do współpracy ze
sprzężonymi z tymi osiami przetwornikami obrotowo-impulsowymi
(tzw. enkoderami) i układami sterowania napędów przez
przetwornice częstotliwości źródeł zasilania (tzw. falowniki).
19
Miniaturyzacja
Występująca tendencja do miniaturyzacji spowodowała
pojawienie
się
ostatnio
także
bardzo
małych
sterowników, odgrywających rolę tzw. inteligentnych
przekaźników (smart-relay), często zintegrowanych z
małym panelem operatorskim, które dały początek już
czwartej generacji sterowników.
Uzupełnić
20
Integracja
Daje się też zauważyć dążenie do
integracji w jednym systemie sterowania funkcji typowych
dla sterownika PLC, panelu operatorskiego czy systemu
SCADA z jednoczesnym uniezależnieniem się od warstwy
sprzętowej. Przykładem takiego rozwiązania jest
PACSystems firmy GE Fanuc, którego funkcjonalność jest
zakorzeniona w jądrze systemu operacyjnego, które może
być swobodnie przenoszone między różnymi elementami
sprzętu (komputery przemysłowe, sterowniki, panele
operatorskie, kontrolery komunikacyjne). Korzystając z
uniwersalnego, wspólnego dla różnych platform
sprzętowych oprogramowania narzędziowego, można
łatwo przenieść aplikację z jednego systemu do innego. W
ten sposób, w zależności od potrzeb, użytkownik może
szybko rozbudowywać lub zmieniać swój system
sterowania.
21

Komunikacja
Obecnie wydaje się jednak, że największy nacisk jest
położony na zagadnienia komunikacyjne. Wynika to przede
wszystkim z rozwoju technologii w telekomunikacji i coraz
powszechniejszego dostępu zarówno do Internetu, jak i do
telefonii komórkowej. Stąd pojawianie się nowych modułów
komunikacyjnych, umożliwiających przesyłanie danych nawet
na bardzo duże odległości między sterownikami PLC a obsługą
procesu, czy to za pomocą poczty elektronicznej (e-mail), czy
też krótkich wiadomości tekstowych (SMS, Short Message
Service). Tego typu komunikacja umożliwia przede wszystkim
powiadamianie obsługi procesu o nieprawidłowościach
występujących w procesie, ale także przesyłanie poleceń do
sterownika. Występuje także tendencja do wprowadzania
standardowych sieci przemysłowych oraz swobodnie
programowanych portów komunikacyjnych, co umożliwia
integrację
w systemie sterowania urządzeń pochodzących od różnych
producentów.
22
Globalizacja
Powszechna w biznesie i produkcji tendencja do
integracji i koncentracji kapitału znalazła także swoje
odzwierciedlenie wśród producentów sterowników.
Wiele firm znanych na rynku sterowników PLC zostało
przejętych
przez
większe
koncerny.
I
tak
np.
najpopularniejsze na rynku amerykańskim sterowniki
Allen-Bradley obecnie należą do koncernu Rockwell
Automation,
a
Schneider
Electric
reprezentują
wspomniane już sterowniki Modicon oraz Telemecanique.
Z kolei sterowniki GE Fanuc są produkowane przez spółkę
amerykańskiego General Electric i japońskiego Fanuca,
największego producenta robotów przemysłowych.
23

Norma IEC 61131
International Electrotechnical Commission
Norma
ta
dotyczy
sterowników
programowalnych oraz związanych z nimi urządzeń
peryferyjnych, takich jak: narzędzia programujące i
uruchomieniowe (PADT, Programming And Debugging
Tools), wyposażenie testujące (TE, Test Equipment),
interfejs
człowiek-maszyna
(MMI,
Man
Machine
Interface).
W związku z coraz powszechniejszym stosowaniem
sterowników PLC, a zarazem różnorodnością rozwiązań
proponowanych przez różnych producentów, ze strony
użytkowników tych systemów zaczęło pojawiać się żądanie
pewnej ich standaryzacji. W szczególności dotyczyło to metod
programowania. Doświadczenia zebrane przez wielu
producentów oraz użytkowników sterowników
programowalnych zaowocowały opracowaniem i wydaniem w
latach dziewięćdziesiątych XX w. przez Międzynarodową
Komisję Elektrotechniki (IEC, International Electrotechnical
Commission) normy IEC 1131. Programmable Controllers, od
1998 r. oznaczonej jako IEC 67737, przyjętej bez zmian w
Europie jako EN61131
.
24

Przedmiot normy
• ustalenie definicji i określenie głównych właściwości istotnych przy
wyborze
i stosowaniu sterowników programowalnych i związanych z nimi
urządzeń peryferyjnych,
• specyfikacja minimalnych wymagań dotyczących własności
funkcjonalnych
i konstrukcyjnych, warunków serwisowania, bezpieczeństwa i testów
dla sterowników programowalnych,
• zdefiniowanie reguł składni i semantyki dla ogólnie stosowanych
języków programowania, zestawu podstawowych elementów
oprogramowania oraz środków, za pomocą których producent może
rozbudowywać te podstawowe zestawy dla własnych implementacji
PLC,
• podanie ogólnych informacji i wskazówek dla użytkownika,
• zdefiniowanie zasad komunikacji między sterownikami a innymi
systemami elektronicznymi z użyciem określonych w normie ISO/IEC
9506 Specyfikacji Komunikatów w Procesie Wytwarzania (MMS,
Manufacturing Message Specification).
25
Zgodność z normą
Część trzecia normy IEC61131 dotyczy zasad programowania
sterowników PLC i z punktu widzenia użytkownika stanowi jej
najważniejszą część.
Przede wszystkim ujednolicono w niej koncepcję programowania
tak, aby korzystając z wprowadzonych zasad, użytkownik był w stanie
programować bez większych trudności różne systemy PLC. Należy ją
jednak traktować przede wszystkim jako przewodnik w zakresie
programowania PLC, a niejako sztywny zbiór zasad. Olbrzymia liczba
zawartych w niej szczegółów powoduje bowiem, że od systemów
programowania sterowników można obecnie oczekiwać tylko
częściowej zgodności z proponowanym standardem.
W przypadku powoływania się na standard IEC61131-3 producenci
systemów PLC powinni wyraźnie określić, w jakim zakresie
wymagania normy są przez ich produkt spełnione, a w jakim nie. W
tym celu norma zawiera pewne kryteria, tzw.
benchmarki
, które
umożliwiają zarówno producentom, jak klientom określenie, na ile
dany system programowania sterowników jest zgodny z IEC61131-3.
26

Część l. Postanowienia ogólne
(General Information)
Część ta zawiera ogólne definicje i typowe własności
funkcjonalne, które odróżniają sterowniki programowalne
PLC od innych systemów. Obejmuje ona standardowe
własności
sterowników
PLC,
jak
np.
cykliczne
przetwarzanie programu aplikacyjnego korzystającego z
przechowywanego w pamięci obrazu stanu wejść i wyjść
sterownika lub przydział czasu pracy na komunikację z
programatorem czy urządzeniami interfejsu operatora
MMI.
27
Część 2. Wymagania
i badania dotyczące sprzętu
Uzupełnić
(Equipment Requirements and Tests)
Zdefiniowane zostały tu elektryczne, mechaniczne i
funkcjonalne wymagania dla urządzeń oraz
odpowiednie testy jakości. Określono także warunki
środowiskowe (temperaturę, wilgotność powietrza itp.)
oraz dokonano klasyfikacji sterowników i narzędzi
programowania.
28
Część 3. Języki
programowania
(Programing Languages)
Ujednolicono
stosowane
dotychczas
języki
programowania w zharmonizowany i zorientowany
przyszłościowo system. Pojęcia podstawowe, zasady
ogólne, model programowy i model komunikacyjny
zostały opisane za pomocą formalnych definicji. Trzecia
część normy specyfikuje syntaktykę i semantykę
tekstowych i graficznych języków programowania oraz
elementy
konfiguracji
wspomagające
instalację
oprogramowania w sterownikach.
29
Część 5. Wymiana
informacji
(Communications)
Ta część normy dotyczy zasad komunikacji między
sterownikami z różnych rodzin oraz z innymi
urządzeniami.
W połączeniu z normą ISO 9506 (MMS), specyfikującą
zasady komunikacji w procesie produkcji, określa ona
funkcje adresowania urządzeń, wymiany danych,
przetwarzania alarmów, sterowanie dostępem i
administrowanie siecią.
30
Część 7. Programowanie z
wyko-rzystaniem zbiorów
rozmytych
(Fuzzy Control Programming)
Celem tej części jest zdefiniowanie języka sterowania
rozmytego FCL (Fuzzy Control Language),
umożliwiającego programowanie aplikacji systemów
sterowania opartych na teorii zbiorów rozmytych (fuzzy
sets) przy użyciu języków zgodnych z częścią 3 normy. W
ten sposób stwarza się możliwość przenoszenia
programów sterowania rozmytego między różnymi
systemami programowania sterowników.
31

Część 8. Wytyczne do
stosowania i implementacji
języków programowania
W tej części normy przedstawiono informacje
uzupełniające dotyczące stosowania języków
programowania zdefiniowanych
w części 3 oraz ogólne wymagania dotyczące sprzętu
i oprogramowania konieczne do rozwijania i konserwacji
programów użytkownika.
(Guidelines for the Application and Implementation of Programming Languages)
32
Funkcje sterownika
Zgodnie z zaleceniami przedstawionymi w pierwszej
części normy IEC 61131 system sterownika
programowalnego powinien realizować następujące
funkcje:
• przetwarzania sygnałów,
• interfejsu z czujnikami i elementami wykonawczymi,
• interfejsu człowiek-maszyna, w tym programowanie,
uruchamianie, testowanie i dokumentowanie,
• komunikacji,
• zasilania.
33
Funkcje przetwarzania
sygnałów
Przetwarzanie sygnałów jest realizowane przez
system operacyjny oraz wykonywany program
użytkownika, przy wykorzystaniu pamięci programu
użytkownika i pamięci danych. Funkcja ta obejmuje
przetwarzanie sygnałów pochodzących z czujników i
wewnętrznej pamięci danych oraz wypracowanie
sygnałów dla elementów wykonawczych i wewnętrznej
pamięci danych, zgodnie z programem użytkownika.
Funkcje systemu operacyjnego są przeznaczone do
zarządzania wewnętrznymi funkcjami sterownika PLC,
takimi jak: kontrola konfiguracji, diagnostyka, zarządzanie
pamięcią, zarządzanie wykonywaniem programu
użytkownika, komunikacja
z urządzeniami peryferyjnymi i funkcjami interfejsu z
czujnikami i elementami wykonawczymi.
34
Program i pamięci
użytkownika
Program użytkownika może składać się z pewnej liczby
zadań. Wykonywanie każdego zadania jest realizowane sekwencyjnie,
a każda funkcja programowalna jest realizowana w czasie aż do
zakończenia zadania. Rozpoczęcie zadania i jego realizacja
(periodycznie lub sterowane przerwaniami) są wykonywane pod
kontrolą systemu operacyjnego.
Pamięć programu użytkownika służy do zapewnienia miejsca
w pamięci do przechowywania rozkazów, których wykonywanie
(cykliczne lub sterowane przerwaniami) określa sposób działania
sterowanego procesu lub maszyny.
Pamięć danych użytkownika służy do zapewnienia miejsca w
pamięci do przechowywania danych operacyjnych wejść/wyjść (I/O,
Input/Output) oraz innych danych (np. wartości nastaw przekaźników
czasowych, liczników, warunków alarmów, parametrów dotyczących
maszyny lub procesu), wymaganych podczas wykonywania programu
użytkownika.
35
Całkowity czas odpowiedzi
sterownika
Całkowity czas odpowiedzi sterownika (TRT, Total
system Response Time) wykonującego program użytkownika jest
sumą wszystkich czasów cząstkowych przejścia sygnału (informacji)
przez system, poczynając od przyłączy elementów wejściowych, a
kończąc na przyłączach wyjściowych. W przypadku periodycznego
wykonywania zadania czas ten wynosi
TRT = TID + TIT + rTSC + TUT + TQT + TQD
gdzie: TID - czas opóźnienia wejścia cyfrowego, TIT- czas
przesyłania wejścia cyfrowego, TSC - czas próbkowania (czas cyklu
sterownika), TUT - czas wykonania zadania użytkownika, TQT' - czas
przesyłania wyjścia cyfrowego, TQD - czas opóźnienia wyjścia
cyfrowego, r - parametr, którego wartość zależy od tego, czy
informacja wejściowa jest dostępna do przetwarzania tuż przed
rozpoczęciem zadania (r = r
min
), czy tuż po rozpoczęciu zadania (r =
r
max
)- Wartości r
min
i r
max
zależą od organizacji programów użytkownika,
a ich minimalne wartości wynoszą odpowiednio 0 i 1.
36
Funkcje interfejsu z
czujnikami i elementami
wykonawczymi
Informacje o stanie i danych z procesu lub maszyny
są przenoszone do systemu I/O sterownika za pomocą
sygnałów binarnych, cyfrowych, przyrostowych lub
analogowych. Podobnie wyniki wypracowane przez
funkcje przetwarzania są przenoszone do procesu lub
maszyny za pomocą odpowiednich sygnałów binarnych,
cyfrowych, przyrostowych lub analogowych. Duża
różnorodność
używanych
czujników
i
elementów
wykonawczych wymaga stosowania szerokiego zakresu
sygnałów wejściowych i wyjściowych.
W systemach I/O są stosowane różne metody
przetwarzania, konwersji i izolacji sygnałów. Na ogół
systemy te charakteryzują się modułowością, pozwalającą
na stosowanie konfiguracji zgodnie z potrzebami procesu
lub maszyny, a także na późniejsze jej rozszerzanie.
37
Oddalone stanowiska I/O
Systemy I/O mogą być umieszczone w bezpośrednim
sąsiedztwie funkcji przetwarzania sygnału (jednostki
centralnej), ale mogą być też montowane w sąsiedztwie
czujników lub elementów wykonawczych, z dala od funkcji
przetwarzania sygnałów.
Szczególne
rozwiązanie
stanowią
tu
oddalone
stanowiska I/O (RIOS, Remote Input Output Station), które
umożliwiają obsługiwanie interfejsu wejścia/wyjścia pod
nadzorem
jednostki
centralnej,
a
więc
multipleksowanie/demultipleksowanie wejść/wyjść oraz
wstępne i końcowe przetwarzanie danych.
38
Funkcje interfejsu
człowiek-maszyna
Funkcje interfejsu człowiek-maszyna (MMI, HMI) mają
za zadanie przede wszystkim:
• dostarczenie operatorowi informacji niezbędnych do
monitorowania działania sterowanej maszyny lub procesu,
• umożliwienie operatorowi oddziaływania na system
PLC oraz na program użytkownika.
W szczególności można wyróżnić tu funkcje
programowania, uruchamiania, testowania i
dokumentacji, które umożliwiają tworzenie kodu
programu użytkownika oraz zapamiętanie go w pamięci
sterownika programowalnego wraz z danymi użytkownika,
a także odzyskiwanie ich z pamięci.
39

Program użytkownika
Program użytkownika może być wprowadzany za pomocą
klawiatury alfanumerycznej (rzadziej symbolicznej), a jeśli jest
stosowany system wyświetlania listy opcji, to przy użyciu klawiszy
kursorów
lub
myszki
(reguła
w narzędziach programujących pracujących w systemie Windows).
Wprowadzane programy i dane powinny być sprawdzane pod
względem poprawności językowej (składnia) i wewnętrznej zgodności,
tak aby możliwość wprowadzenia błędnych programów lub danych
była jak najmniejsza.
Podczas tworzenia programu użytkownika wprowadzane
rozkazy są wyświetlane zdanie po zdaniu (w przypadku urządzenia
wyświetlającego liniowego) lub segment po segmencie (w przypadku
monitora ekranowego). Ponadto kompletny program może być
drukowany.
Utworzony program jest umieszczony albo w pamięci
sterownika PLC, albo w pamięci narzędzia programującego PADT.
Drugi sposób wymaga przesłania programu lub włożenia kasety
pamięci do sterownika przed uruchomieniem. Podczas uruchamiania
zarówno program użytkownika, jak i dane są dostępne z PADT w celu
monitorowania, modyfikacji lub korekcji programu. Może to być
wykonywane nawet on-line, tzn. w czasie bezpośredniego sterowania
pracą maszyny lub procesu.
40

Przystosowanie sterownika
PLC
Przystosowanie sterownika PLC do sterowanego procesu
lub maszyny uzyskuje się przez:
• funkcje testujące do sprawdzenia czujników i elementów
wykonawczych przyłączonych do sterownika, np.
wymuszanie wyjść (forcing),
• funkcje testujące do sprawdzenia działania sekwencji
programu, np. przez ustawianie wskaźników stanu lub
wymuszanie wejść sterownika,
• ustawianie lub zerowanie stałych (zegarów, liczników
itp.).
41

Informacje o procesie lub
maszynie
W trakcie uruchamiania i rozruchu systemu sterowania
bardzo pomocne jest dostarczanie informacji o procesie
lub maszynie oraz o wewnętrznym stanie systemu
sterownika PLC i programie użytkownika. Typowe sposoby
to:
• wskazywanie stanu wejść i wyjść,
• wskazywanie lub rejestrowanie zmian stanu sygnałów
zewnętrznych i danych wewnętrznych,
• monitorowanie czasu próbkowania i wykonywania
programów,
• wizualizacja w czasie rzeczywistym wykonywania
programu i przetwarzania danych,
• wskaźniki stanu zabezpieczeń i bezpieczników
topikowych.
42

Funkcje testujące
Podczas pisania, uruchamiania i sprawdzania programu
użytkownik może być wspomagany przez następujące
funkcje testujące:
• sprawdzanie stanów wejść i wyjść oraz funkcji
wewnętrznych (zegary, liczniki),
• sprawdzanie sekwencji programu, np. praca krokowa,
zmiany czasu cyklu programu, polecenia zatrzymania,
• symulacja funkcji interfejsów lub informacji wymienianej
między zadaniami lub modułami wewnętrznymi
sterownika.
43
Dokumentacja roli
sterownika
Dokumentacja powinna zawierać pełny opis systemu
sterownika i jego zastosowania, w tym:
• opis konfiguracji sprzętu,
• dokumentację programu użytkownika, zawierającą
wydruk programu z nazwami mnemonicznymi sygnałów i
danych procesowych, tabelę wzajemnych odwołań
wszystkich danych procesowych, komentarze i opis
modyfikacji,
• dokumentację serwisową.
44
Funkcje komunikacyjne
Funkcje komunikacyjne obsługują wymianę programów i
danych między urządzeniami zewnętrznymi a jednostką
centralną sterownika PLC. Oprócz przesyłania programów
i zbiorów danych umożliwiają także monitorowanie i
diagnostykę systemu. Zwykle komunikacja taka jest
realizowana za pomocą transmisji szeregowej w sieci
lokalnej (LAN, Local Area Network) lub w systemie
sprzężeń punkt do punktu (point-to-point).
45
Funkcje zasilania
Do funkcji zasilania należy wytwarzanie napięć
niezbędnych do działania systemu PLC, a także
dostarczanie sygnałów kontrolnych w celu poprawnej
synchronizacji startu i stopu elementów wyposażenia. W
zależności od wymaganych napięć, poboru mocy,
wymagań bezprzerwowego działania itp. Stosuje się różne
typy zasilaczy. Najczęściej obwody wejść i wyjść
sterownika są zasilane napięciem stałym 24 V, a sam
sterownik albo napięciem stałym 24 V, albo napięciem
przemiennym 240 V. Jednym z podstawowych czynników
zwiększających dyspozycyjność systemu PLC jest
stosowanie redundancji zasilania.
46
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
Wyszukiwarka
Podobne podstrony:
Psychologia ogólna Historia psychologii Sotwin wykład 7 Historia myśli psychologicznej w Polsce
01 Rys Historyczny
01 Socjologia jako nauka i wiedzaid 2940 ppt
01 Aminokwasy, peptydy, białka, enzymyid 3054 ppt
wyklad 01 rys historyczny
01 Podstawowe informacje o pamięciach półprzewodnikowychid 2695 ppt
02 01 2011 Projektowanie Procesow w VTECid 3497 ppt
01 04 2011 treningi izometryczneid 2721 ppt
01 Wybrane zaburzenia gospodarki węglowodanowejid 2675 ppt
(2)GT 01&02 ideas and examplesid 941 ppt
01. Rys Historyczny
01 Środowisko naturalne i jego elementyid 2606 ppt
04 HISTORIA CHIRURGII GDANSKIEJid 4835 ppt
1 Historia Unii Europejskiejid 9279 ppt
09 01 2012 historia
1 historia logistyki(1)id 8529 ppt
więcej podobnych podstron