
Mechanika
Mechanika
Ogólna
Ogólna
Statyka IV
Statyka IV
Adam F.
Adam F.
Bolt
Bolt

Wykład IV
Wykład IV
Redukcja płaskiego uładu sił
Redukcja płaskiego uładu sił do jednej
siły wypadkowej
Równowaga dowolnego płaskiego układu
sił
Równowaga płaskich układu sił
równoległych
Równowaga układów złożonych z ciał
sztywnych
Zaganienia statycznie wyznaczalne i
niewyznaczalne
Płaskie układy sił bez tarcia
Płaskie układy sił bez tarcia

Redukcja płaskiego układu
sił
Płaski układ sił - siły leżą w jednej
płaszczyźnie
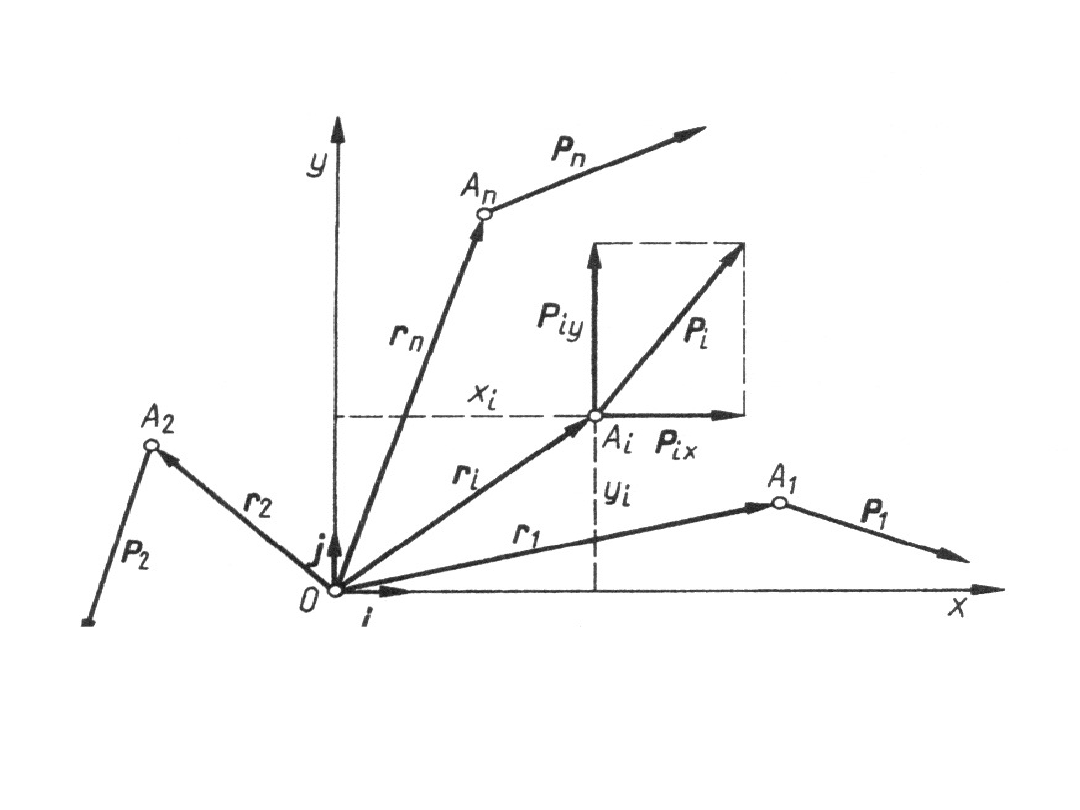
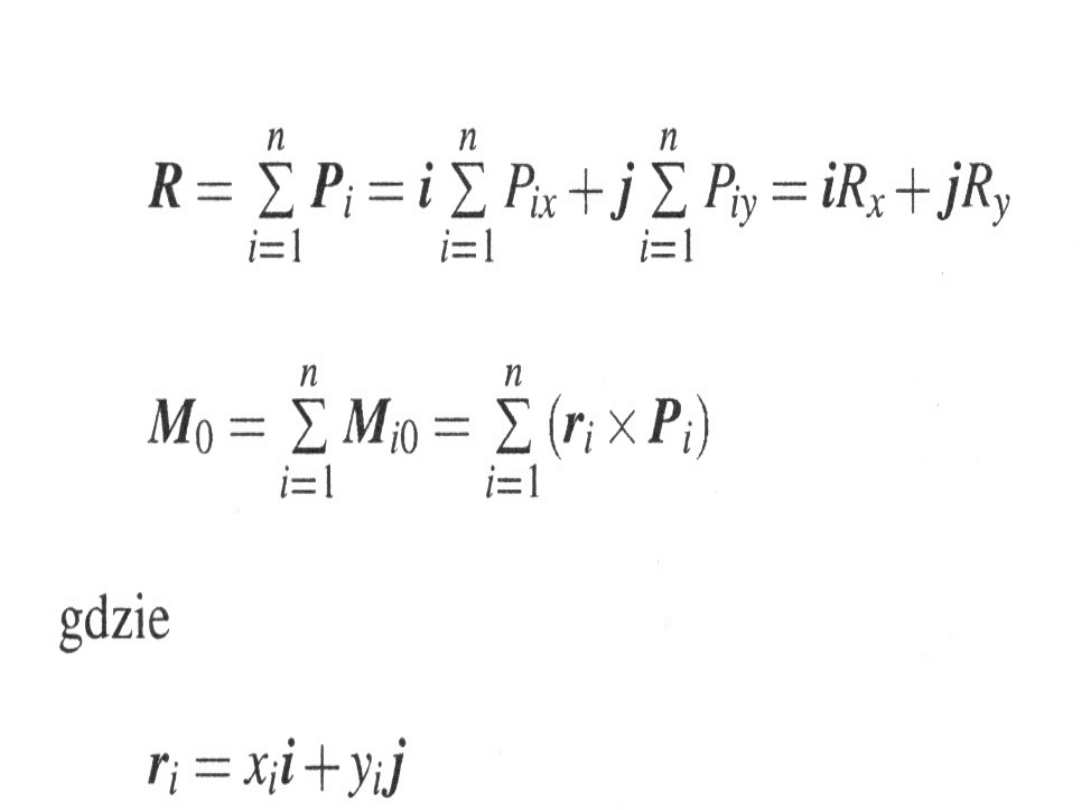
Przesuwając równolegle wszystkie siły danego
Przesuwając równolegle wszystkie siły danego
układu do jednego punktu
układu do jednego punktu
O
O
otrzymamy jedną siłę
otrzymamy jedną siłę
R
R
równą ich sumie geometrycznej i jedną parę sił o
równą ich sumie geometrycznej i jedną parę sił o
momencie
momencie
M
M
o
o
równym sumie momentów tych par sił
równym sumie momentów tych par sił
Redukcja płaskiego uładu sił
Redukcja płaskiego uładu sił - cd.
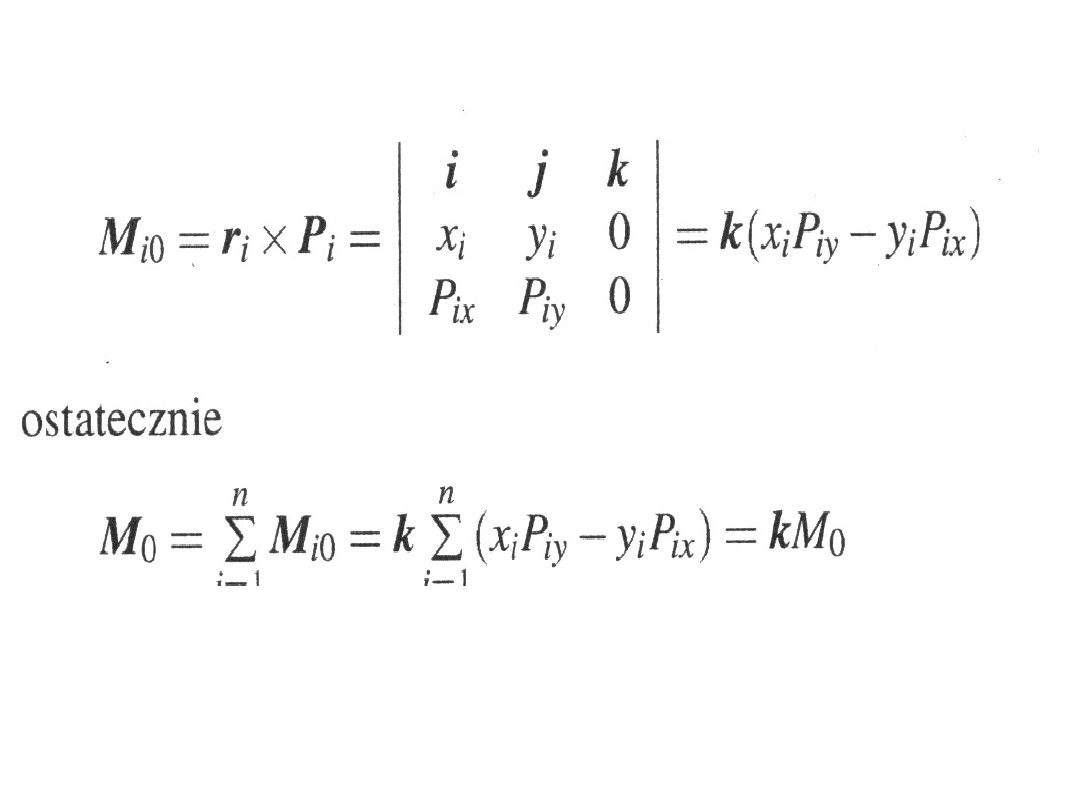
Wzór ten pozwala stwierdzić, że wektor momentu
Wzór ten pozwala stwierdzić, że wektor momentu
głównego
głównego
M
M
0
0
jest wektorem o jednej składowej w
jest wektorem o jednej składowej w
kierunku wersora
kierunku wersora
k,
k,
czyli jest prostopadły do
czyli jest prostopadły do
płaszczyzny
płaszczyzny
Oxy
Oxy
i
i
wektora głównego
wektora głównego
R
R
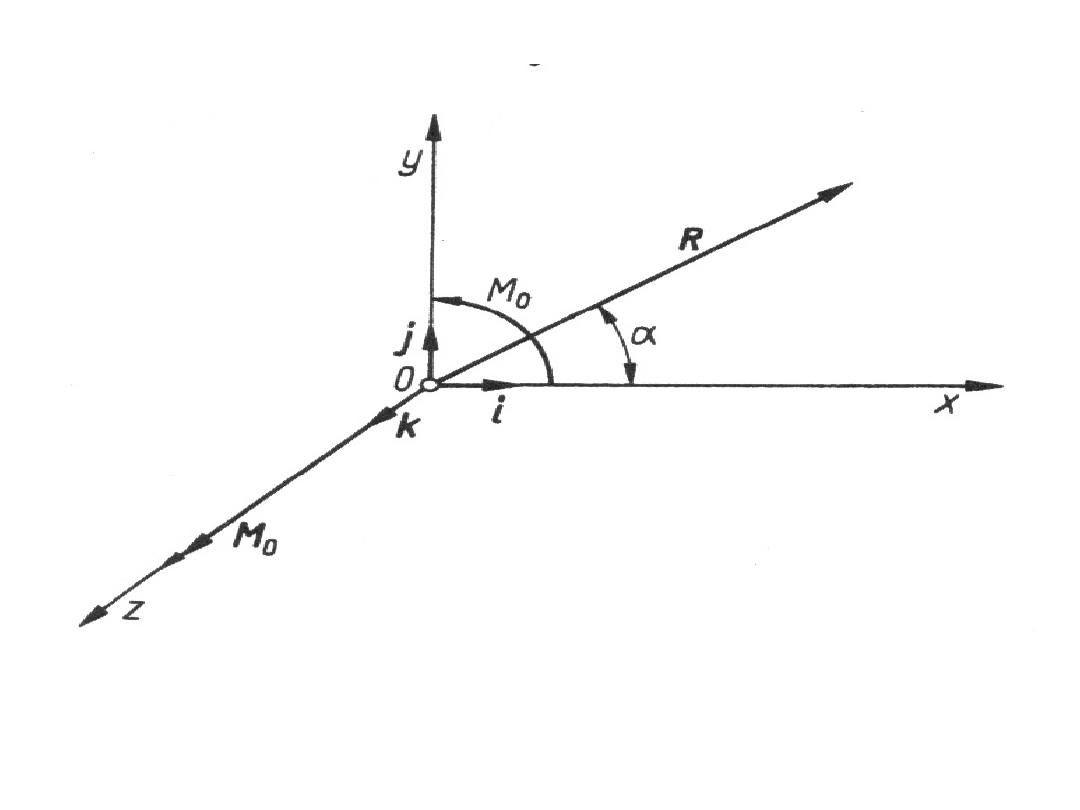
Wektor główny
Wektor główny
R
R
i wektor momentu
i wektor momentu
głównego
głównego
M
M
0
0
Siłę R nazywamy wektorem głównym, a
moment M
0
momentem głównym płaskiego
układu sił względem środka redukcji 0
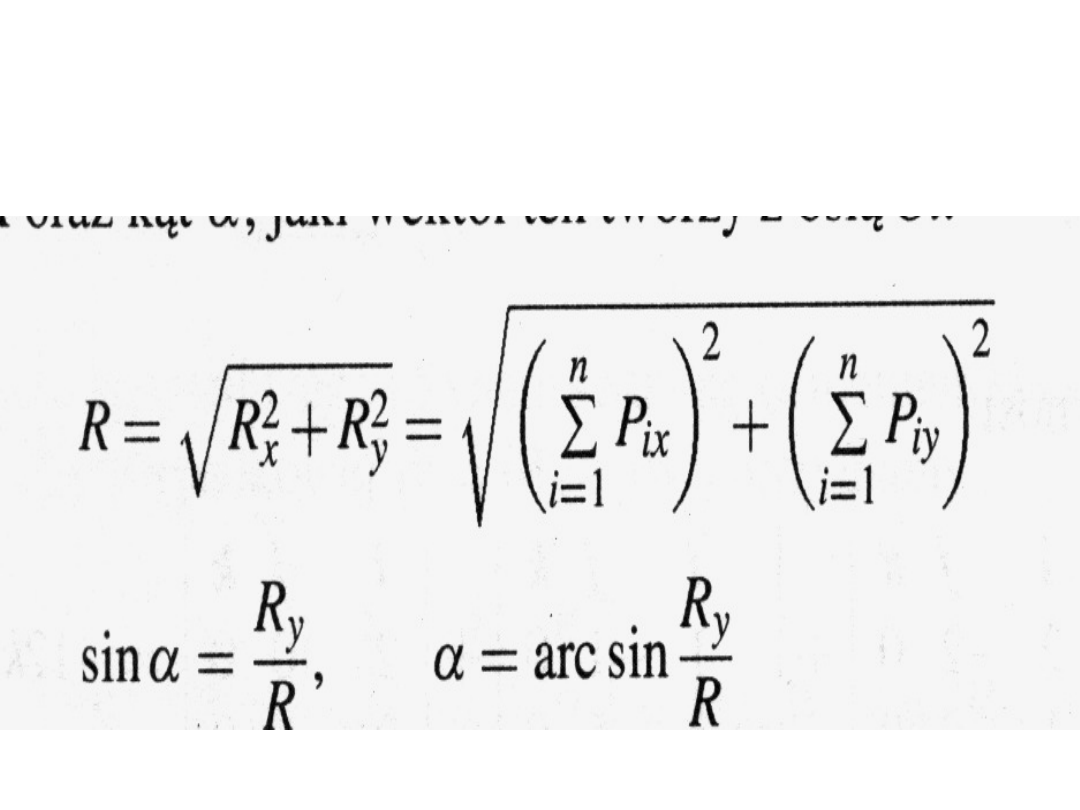
Wyznaczenie wartośći wektora
Wyznaczenie wartośći wektora
głównego
głównego
R
R
oraz kąta
oraz kąta
a
a
jaki wektor
jaki wektor
tworzy z osią
tworzy z osią
Ox
Ox

Redukcja płaskiego układu
sił do jednej siły
wypadkowej
Wypadkowa płaskiego układu sił
Mo
Mo
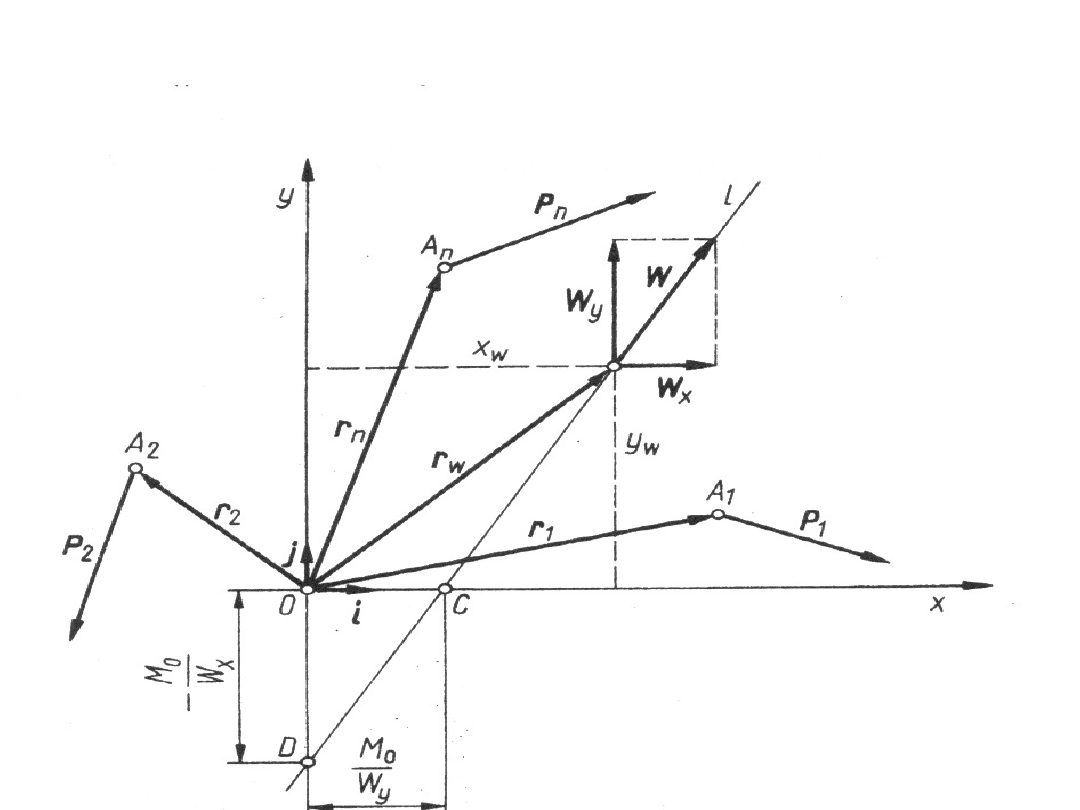
Redukcja płaskiego układu sił do
jednej siły wypadkowej
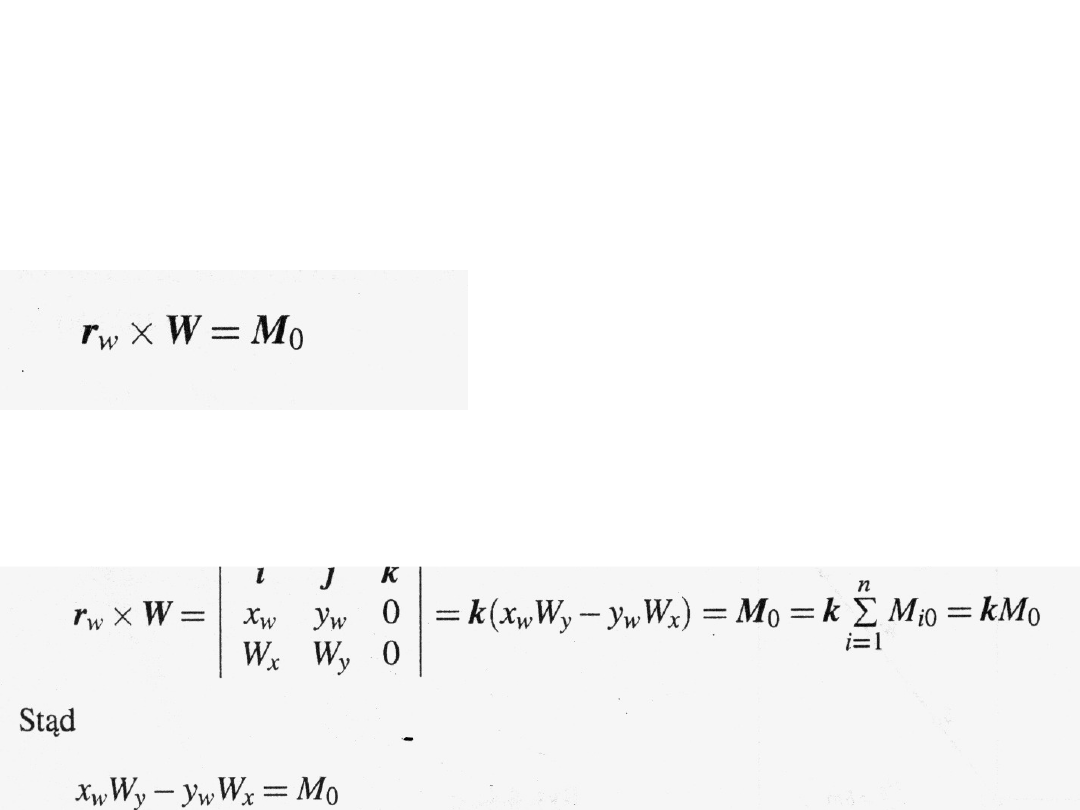
Równanie linii działania wypadkowej
• wyznacza się z warunku, że moment wypadkowej
względem początku układu równa się momentowi
głównemu M
o
równemu sumie momentów danych sił
względem początku układu współrzędnych
Po rozpisaniu tego równania z uwzględnieniem
składowych wektora r
w
=i x
w
+ jy
w
i siły wypadkowej W =
iW
x
+jW
y
otrzymamy:
Po przekształceniu otrzymamy postać
odcinkową linii działania wypadkowej
Gdzie: wyrażenia w mianownikach M
o
/W
y
,
—M
o
/W
x
odpowiadają odcinkom OC i OD,
jakie linia działania wypadkowej odcina na
osiach x i y

R = O i M
0
= 0— układ jest w
równowadze.
W układzie płaskim mogą zachodzić
cztery przypadki:
0
0
0
M
,
R
1
)
— układ sprowadza się do wypadkowej o
linii działania wg powyższego wzoru
0
0
0
M
,
R
2
)
— układ sprowadza się do wypadkowej
przechodzącej przez środek redukcji 0,
3)
0
0
0
M
,
R
układ sprowadza się do pary sił leżących w
płaszczyźnie Oxy,
4)

Równowaga dowolnego
płaskiego układu sił
Równowaga płaskiego dowolnego
układu sił
Równowaga dowolnego płaskiego
układu sił
Warunki równowagi dowolnego płaskiego
układu sił otrzymuje się, przyrównując do
zera wektor główny układu R i moment
główny M względem środka redukcji O
R = 0,
M
0
= 0
Dwa równania wektorowe (można zastąpić
trzema równaniami skalarnymi:
Należy dodać, że punkt 0, względem
którego oblicza się sumę momentów danych
sił, może być obrany zupełnie dowolnie i nie
musi pokrywać się z początkiem przyjętego
układu współrzędnych.

Równowaga dowolnego płaskiego
układu sił
Płaski dowolny układ sił znajduje się w
równowadze, jeśli sumy rzutów
wszystkich sił na osie układu są równe
zeru i moment wszystkich sił
względem dowolnego punktu
płaszczyzny działania sił jest równy
zeru.
Pierwsze dwa równania nazywamy:
- równaniami rzutów sił,
a ostatnie
- równaniem momentów.
Równania te nie stanowią jedynej postaci
równań równowagi.
Inne sposoby układania równań
równowagi.
Wykażemy, że sumy momentów względem
dowolnych dwóch punktów A i B są równe
zeru oraz suma rzutów sił na dowolną oś x,
nieprostopadłą do odcinka AB łączącego
dwa punkty, jest także równa zeru (rys.)
Równowaga
płaskiego
dowolnego
układu sił
Pierwsze równanie momentów oznacza, że
układ jest w równowadze lub ma
wypadkową przechodzącą przez punkt A.
Jeżeli ponadto jest spełnione drugie
równanie
momentów, to układ sił jest
w równowadze lub
ma wypadkową
działającą wzdłuż odcinka AB.
Natomiast, jeżeli jeszcze jest spełnione
równanie rzutów sił, to układ sił jest w
równowadze.

Gdyby istniała wypadkowa, działająca
wzdłuż odcinka AB, wtedy jej rzut na oś x,
nieprostopadły do AB, nie byłby równy
zeru.
Jeżeli moment układu sił względem
dwóch punktów jest równy zeru oraz
rzut sił na oś nieprostopadłą do
odcinka łączącego te punkty jest
równy zeru, to płaski układ sił jest w
równowadze.
otrzymamy, pisząc równania momentów
względem trzech punktów A, B, C, nie
leżących na jednej prostej
Trzeci sposób układania równań równowagi
dowolnego płaskiego układu sił.
Prowadząc rozumowanie tak, jak dla równań
drugiego przypadku można stwierdzić, że i
te równania stanowią konieczny i
wystarczający warunek równowagi
dowolnego płaskiego układu sił, pod
warunkiem, że punkty A, B i C nie leżą na
jednej prostej.

Trzeci sposób układania równań równowagi
dowolnego płaskiego układu sił.
Gdyby punkty te leżały na jednej prostej,
mogłaby wzdłuż niej działać wy padkowa
układu sił (układ sił nie znajdowałby się w
równowadze, mimo spełnienia równań
momentów względem trzech punktów).
Jeżeli moment układu sił względem
trzech punktów nie leżących na
jednej prostej jest równy zeru, to
płaski układ sił jest w równowadze.

Równowaga płaskiego
układu sił równoległych
Płaski układ sił równoległych
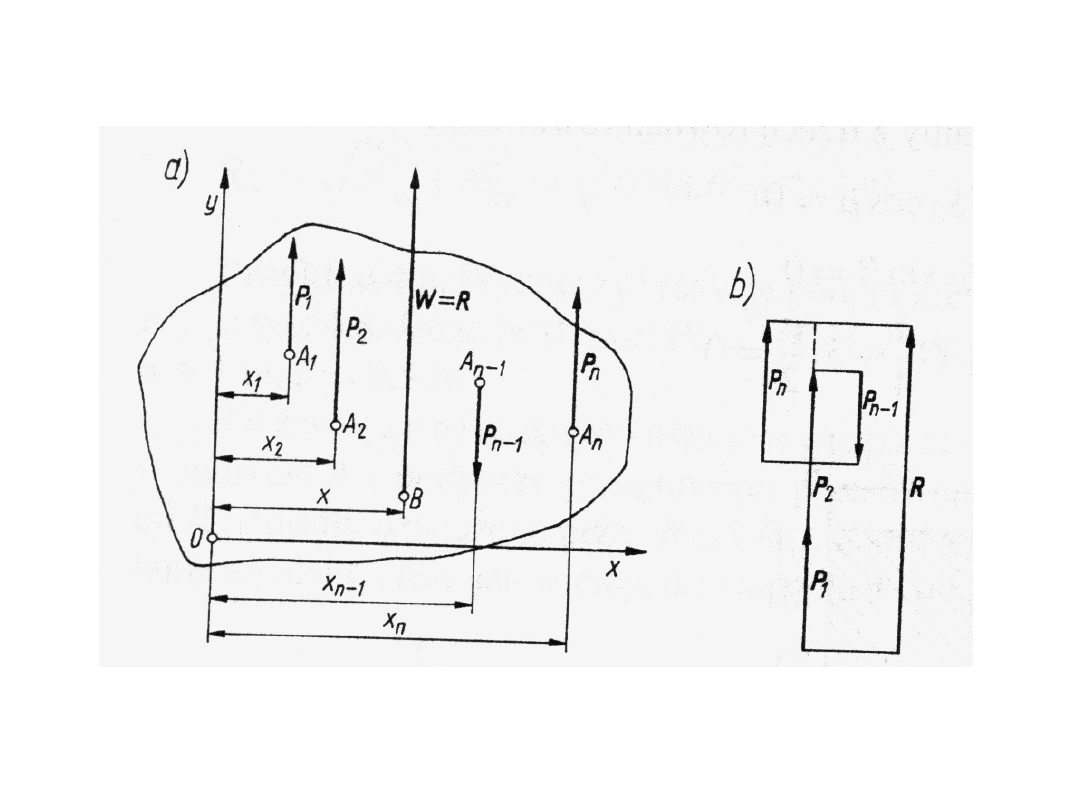
Plaski układ sił równoległych( rys a) jest szczególnym
przypadkiem dowolnego płaskiego układu sił. Wielobok sił
(rys. b) staje się odcinkiem prostej.
Wartość wypadkowej jest równa sumie wartości sił
P
1
, P
2
... P
n
Równowaga płaskiego układu sił
równoległych
Gdy siły są skierowane zgodnie z osią Oy, Wartości
Pi > 0
Gdy siły są skierowane przeciwnie osią Oy,
Wartości Pi < 0
Na podstawie twierdzenia, że moment siły wypadkowej jest
równy sumie momentów sił ddających tę wypadkową,
otrzymamy:
Odległość x linii działania wypadkowej od początku
układu współrzędnych O
Równowaga płaskiego układu sił
równoległych
Przyjmując osie układu jak na rys a, stwierdzamy że pierwsze
z równań równowagi jest spełnione tożsamościowo i powstają
dwa równania równowagi
Dla płaskiego równoległego układu sił mamy tylko dwa równania
równowagi
Pierwsze równanie rzutów sił na oś równoległą do linii
działania sił możemy zastąpić równaniem momentów.
Przyjmując dowolne dwa punkty A i B, nie leżące na
Przyjmując dowolne dwa punkty A i B, nie leżące na
jednej prostej równoległej do linii działąnia układu sił,
jednej prostej równoległej do linii działąnia układu sił,
otrzymujemy dwa równania równowagi wyrażone przez
otrzymujemy dwa równania równowagi wyrażone przez
momenty
momenty

Równowaga układów
złożonych z ciał sztywnych

Równowaga układów złożonych z ciał
sztywnych
Zagadnienie równowagi dwóch lub
większej liczby ciał sztywnych,
stykających się ze sobą lub
połączonych odpo wiednimi więzami
(przegubami, prętami, cięgnami itp.).
Przykłady układów ciał sztywnych,
spotykanych w konstrukcjach
inżynierskich:
•belki przegubowe,
•ramy trójprzegubowe i bardziej
złożone konstrukcje.
Typowy tok postępo wania przy
wyznaczaniu reakcji podpór i sił
wzajemnego oddziaływania między
częściami układu złożonego
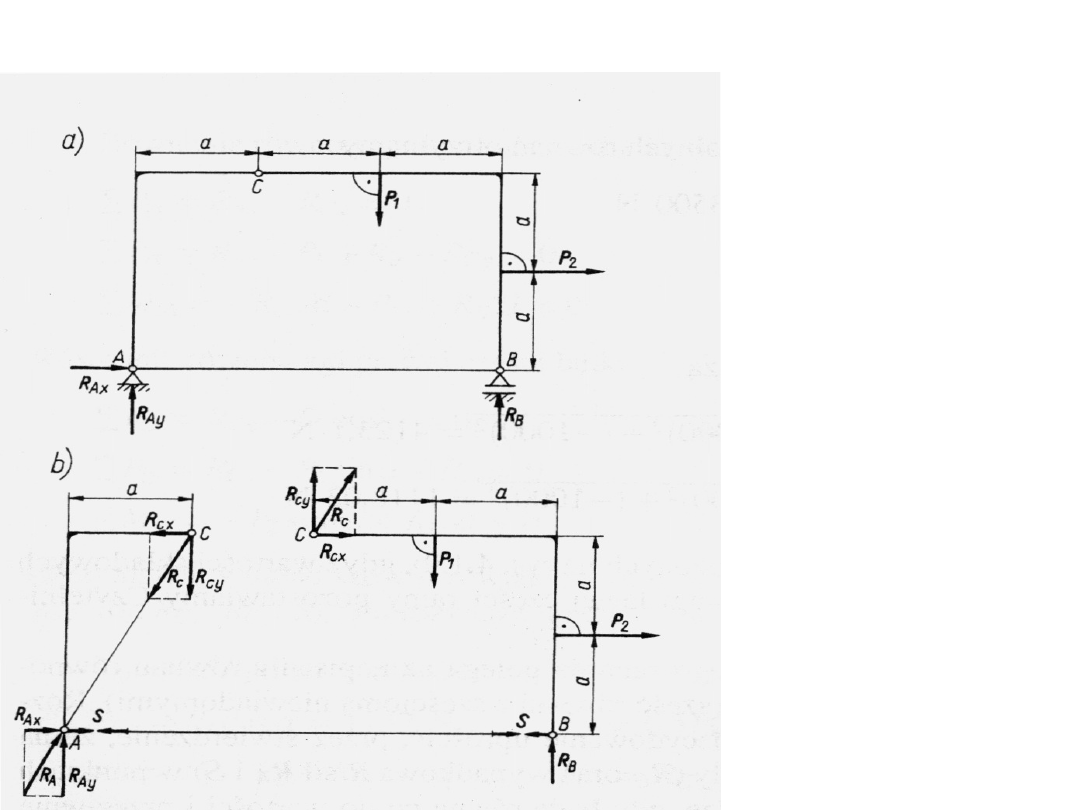
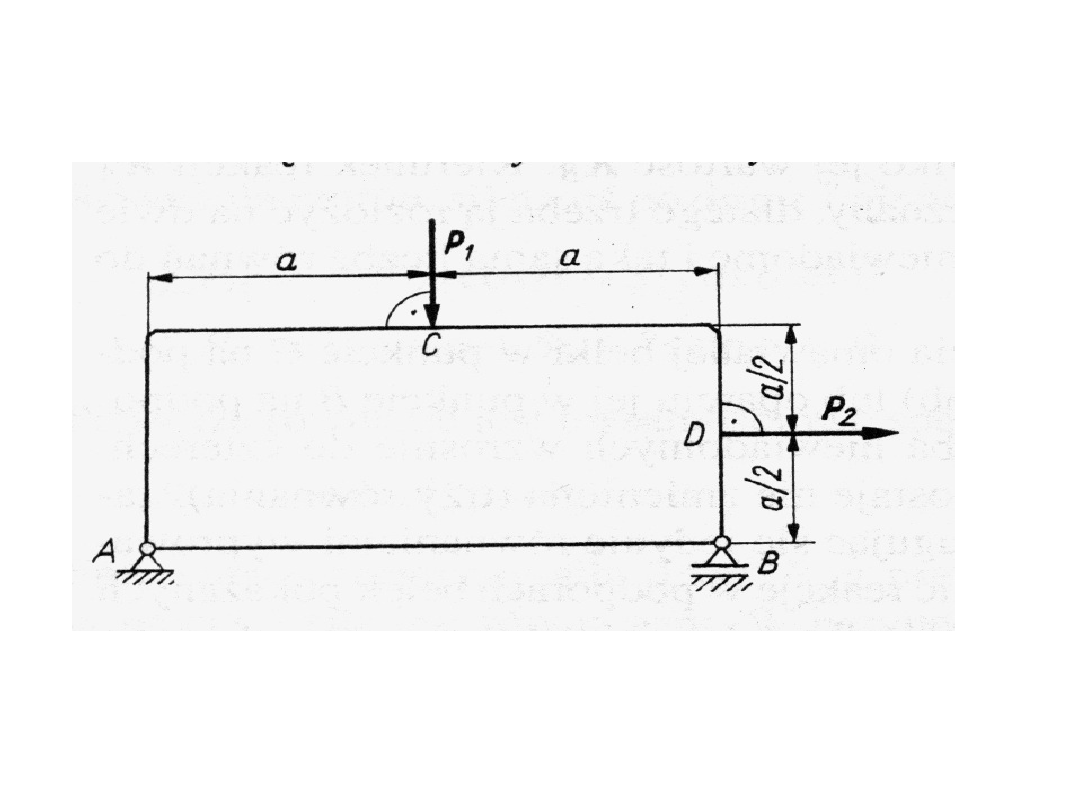
Przykład - rama trójprzegubowa
Ciężar własny
konstrukcji
oraz tarcie w
przegubach
można pominąć
Dane
liczbowe:
P
1
= 1 000 N
P
2
= 4 000 N
a=1 m

Zadanie:
Wyznaczyć reakcje podpór A i B, reakcje
wzajemnego oddziaływaniaobydwu części
układu w przegubie C i siłę rozciągającą lub
ściskającą pręt AB
Rozwiązaniee:
Rozważamy równowagę całej ramy ACB.
Działaja na nią dwie siły zewnętrzne P
1
i P
2
oraz reakcje podporze przegubowej stałej A
i podporze przesuwnej B.
Ponieważ kierunek reakcji R
A
w punkcie a
jest nieznany, rozkładamy ją na dwie
składowe R
Ax i
R
Ay
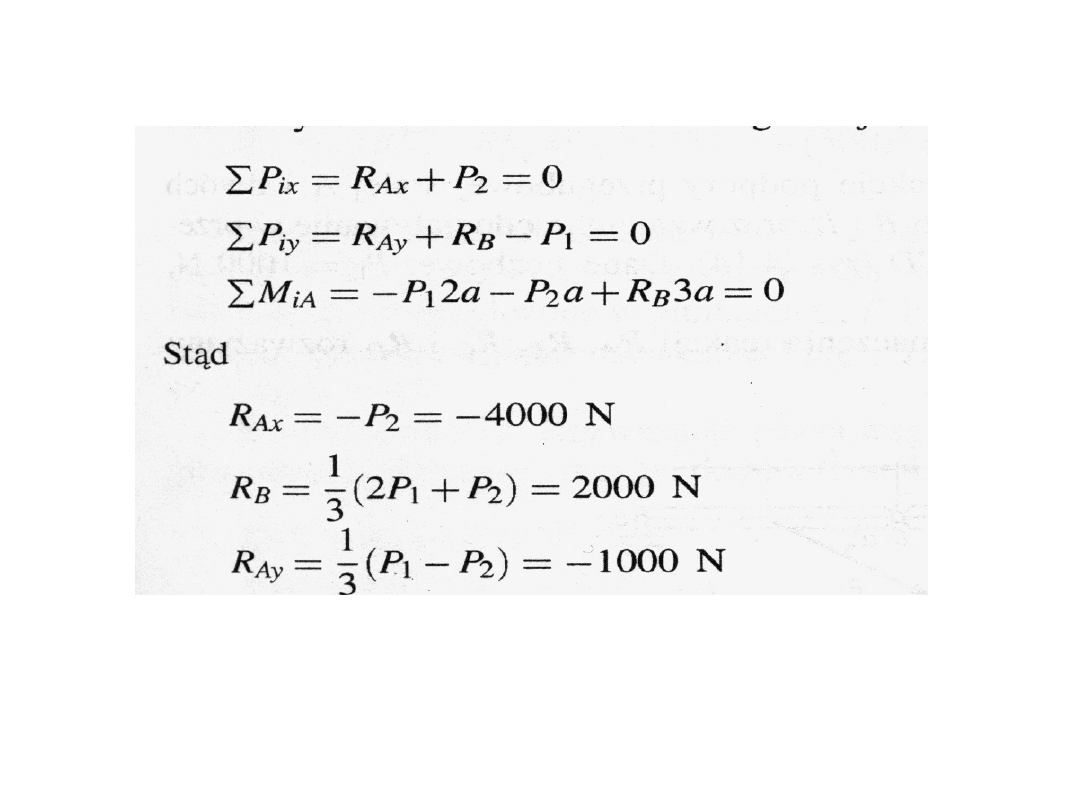
Trzy niewiadome wyznaczamy z trzech
równań równowagi całej ramy
W celu wyznaczenia reakcji wzajemnego
oddziaływania obydwu części R
C
i siły S w
pręcie AB możemy rozważyć równowagę lewej
lub prawej części tej samej ramy
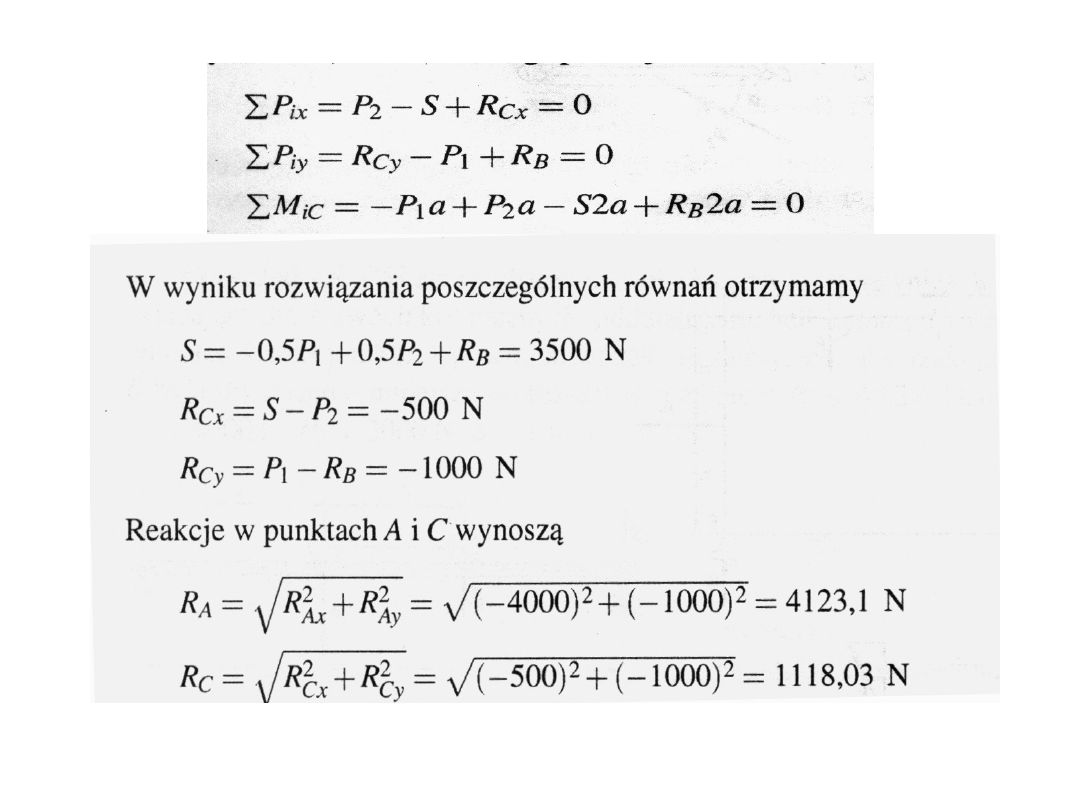
Z równowagi prawej części ramy otrzymamy trzy
równania
A ich zwroty są przeciwne do założonych na rysunku bo ich
wartości są ujemne
Zagadnienia statycznie wyznaczalne i
niewyznaczalne

Zagadnienia statycznie wyznaczalne
m
m
m
m
•W przy padku układu statycznie
wyznaczalnego liczba reakcji zastępujących
działanie wię zów (równa liczbie więzów
potrzebnych do unieruchomienia danego
układu) jest równa liczbie równań równowagi.
•Jeżeli więzów jest za mało,
to dany układ mechaniczny jest niesztywny.
•Równowaga takiego układu może być
zapewniona w przypadku spełnienia
dodatkowych warunków, które zapewniają
układowi od powiednią postać geometryczną.

Zagadnienia statycznie wyznaczalne
m
m
m
m
•Zagadnieniami statycznie wyznaczalnymi
nazywamy takie zagadnienia, które
dotyczą równowagi układu sił
działających w jednej płaszczyźnie na
jedno lub kilka ciał sztywnych (układ
mechaniczny), w których istnieje
możliwość wyznaczenia niewiadomych sił.
• Niewiadome siły stanowią zwykle
reakcje podpór albo siły wza jemnego
oddziaływania wewnątrz rozważanego
układu mechanicznego.
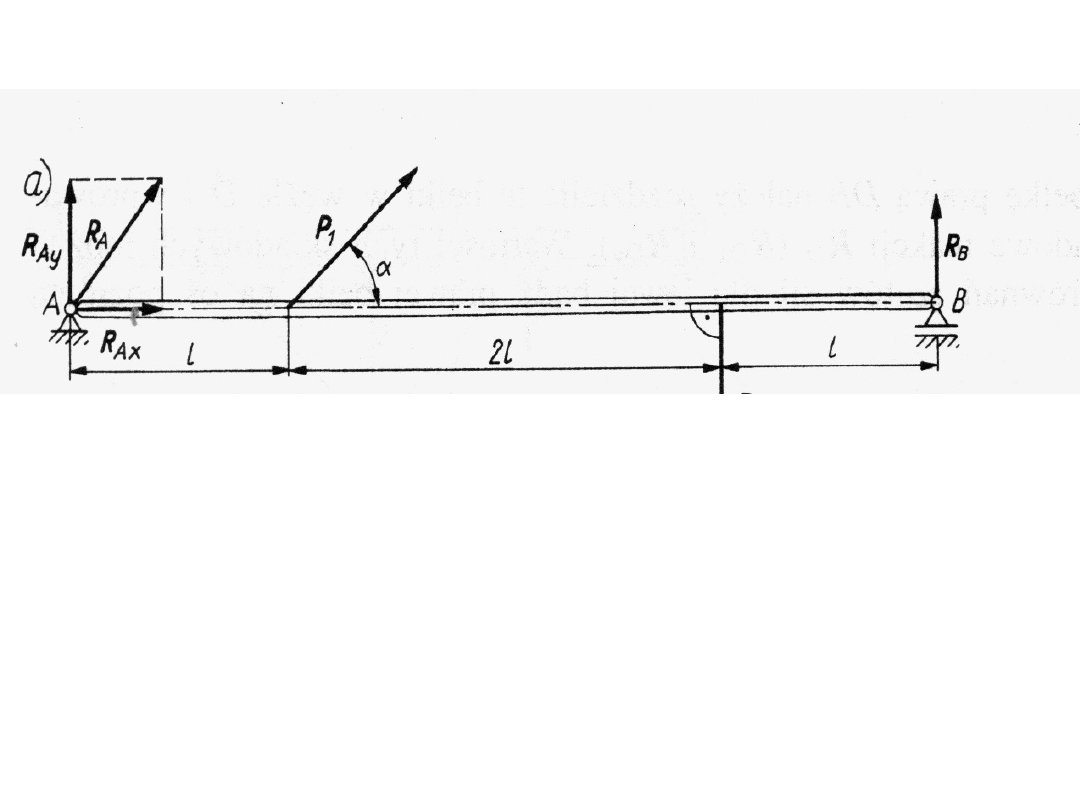
Przykłady
a)
belka statycznie wyznaczalna, nieznane są tylko
reakcje podpór.
•na podporze przegubowej przesuwnej B znany
jest kierunek reakcji R
B
,
•należy wyznaczyć tylko jej wartość R
B
.
•kierunek reakcji RA w podporze przegubowej
stałej A jest nieznany, dlatego trzeba ją rozłożyć
na dwie składowe R
Ax
i R
Ay
Łącznie mamy trzy niewiadome i taką samą
liczbę równań do ich wyznaczenia.

Zagadnienia statycznie
niewyznaczalne.
•gdy więzów jest więcej niż potrzeba do
unieruchomienia danego układu
mechanicznego, dany układ jest
przesztywniony,
•wówczas niewiadomych reakcji jest
więcej niż mamy równań równowagi i
dlatego niektórych reakcji nie można
wyznaczyć metodami stosowanymi w
statyce,
•jeżeli liczba zbytecznych więzów
wynosi n, to układ jest n-krotnie
statycznie niewyznaczalny.

Zagadnienia statycznie
niewyznaczalne
Statyczna niewyznaczalność może być:
•
zewnętrzna (gdy niewyznaczalnymi są
reakcje podpór nie należących do danego
układu)
•wewnętrzna (gdy nie można wyznaczyć
sił stykowych między elementami układu
lub sił wewnętrznych przenoszonych
przez jakiekolwiek elementy tego układu).
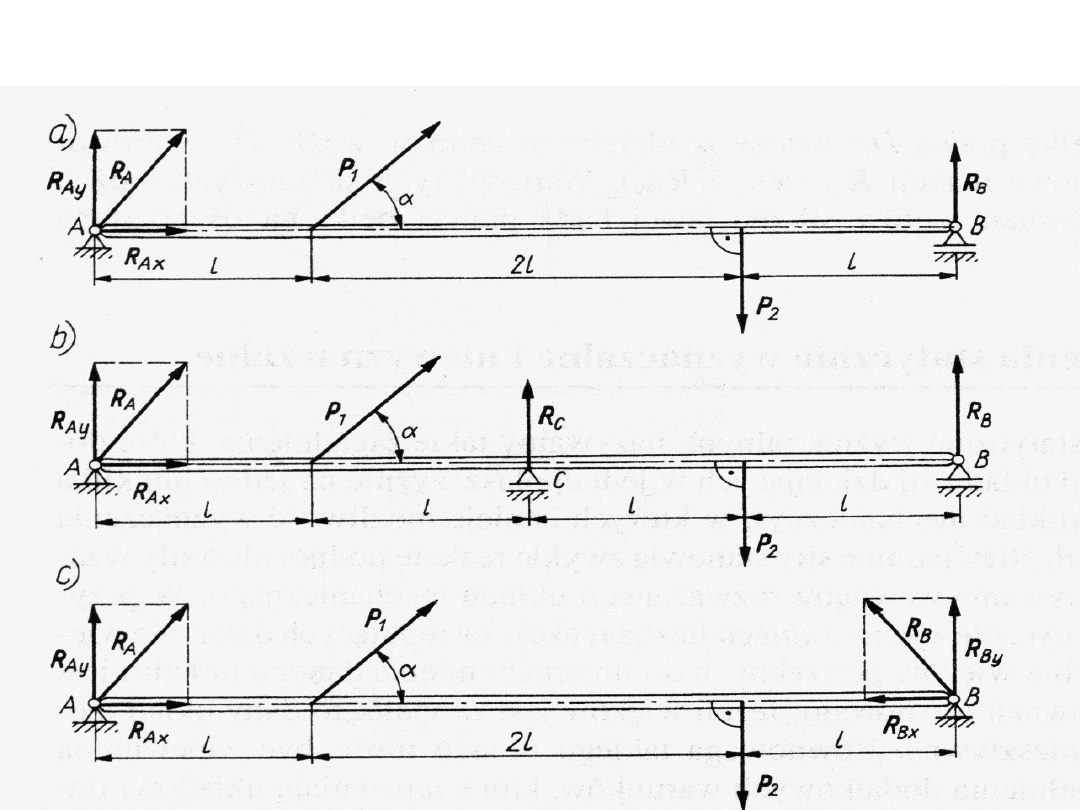
Przykłady

Przykłady
b) w przypadku dodatkowego podparcia
omawianej belki w punkcie C na pod porze
przegubowej przesuwnej
lub
c) oparciu jej w punkcie B na podpo rze
przegubowej stałej liczba niewiadomych
wzrośnie do czterech.
Belki jednokrotnie stycznie
niewyznaczalne

Belki jednokrotnie stycznie niewyznaczalne
Ponieważ liczba równań równowagi
pozostaje nie zmieniona (trzy równania),
zadań tych nie można już rozwiązać,
posługując się jedynie równaniami
wyprowadzonymi dla ciała sztywnego.
Aby określić reakcje w podporach belek
pokazanych na rys. b i c, należy rozważyć
ich odkształcenia pod wpływem sił na nie
działajacych.
Zadaniami takimi zajmuje się wytrzymałość
materiałów
Przykład układu jednokrotnie
wewnętrznie statycznie
niewyznaczalnego
Przesztywnieniem jest pręt AB, albowiem po
usunięciu jego rama jest sztywna i ma zapewnioną
równowagę

Dziekuje:D
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
Wyszukiwarka
Podobne podstrony:
WYKŁAD Mechanika Ogólna Część VII
WYKŁAD Mechanika Ogólna Część III
WYKŁAD Mechanika Ogólna Część II
WYKŁAD Mechanika Ogólna Część V
WYKŁAD Mechanika Ogólna Część Xi XI
WYKŁAD Mechanika Ogólna Część VI
WYKŁAD Mechanika Ogólna Część VIII
WYKŁAD Mechanika Ogólna Część VII
MachBarwi2, Politechnika, Sprawozdania, projekty, wyklady, Mechanika Ogolna
Strona tytułowa mechanika komputerowa, Politechnika, Sprawozdania, projekty, wyklady, Mechanika Ogol
więcej podobnych podstron