Podstawy programowania PLC - elementy języka drabinkowego
Wszystkie grafiki, zdjęcia, programy oraz treść instrukcji podlegają ochronie prawnej na mocy ustawy o prawie autorskim. Używanie ich w jakikolwiek sposób bez uprzedniego,
pisemnego zezwolenia wydanego przez AGH jest zabronione i może spowodować pociągnięcie do odpowiedzialności cywilnej i karnej w maksymalnym zakresie dopuszczalnym przez
prawo.
1
Przykład programowania PLC w języku drabinkowym - ćwiczenie 6
1. Cel ćwiczenia
Zapoznanie się z podstawowymi elementami języka drabinkowego i zasadami
programowania Programowalnych Sterowników Logicznych (Programmable Logic
Controller). W ramach ćwiczenia studenci wykonują przykładowe programy na sterownikach.
2. Wykaz aparatury
• Sterownik programowalny typu FX3U firmy Mitsubishi
• Panel operatora firmy Proface
• Oprogramowanie narzędziowe GX Developer
3. Podstawy programowania w języku drabinkowym
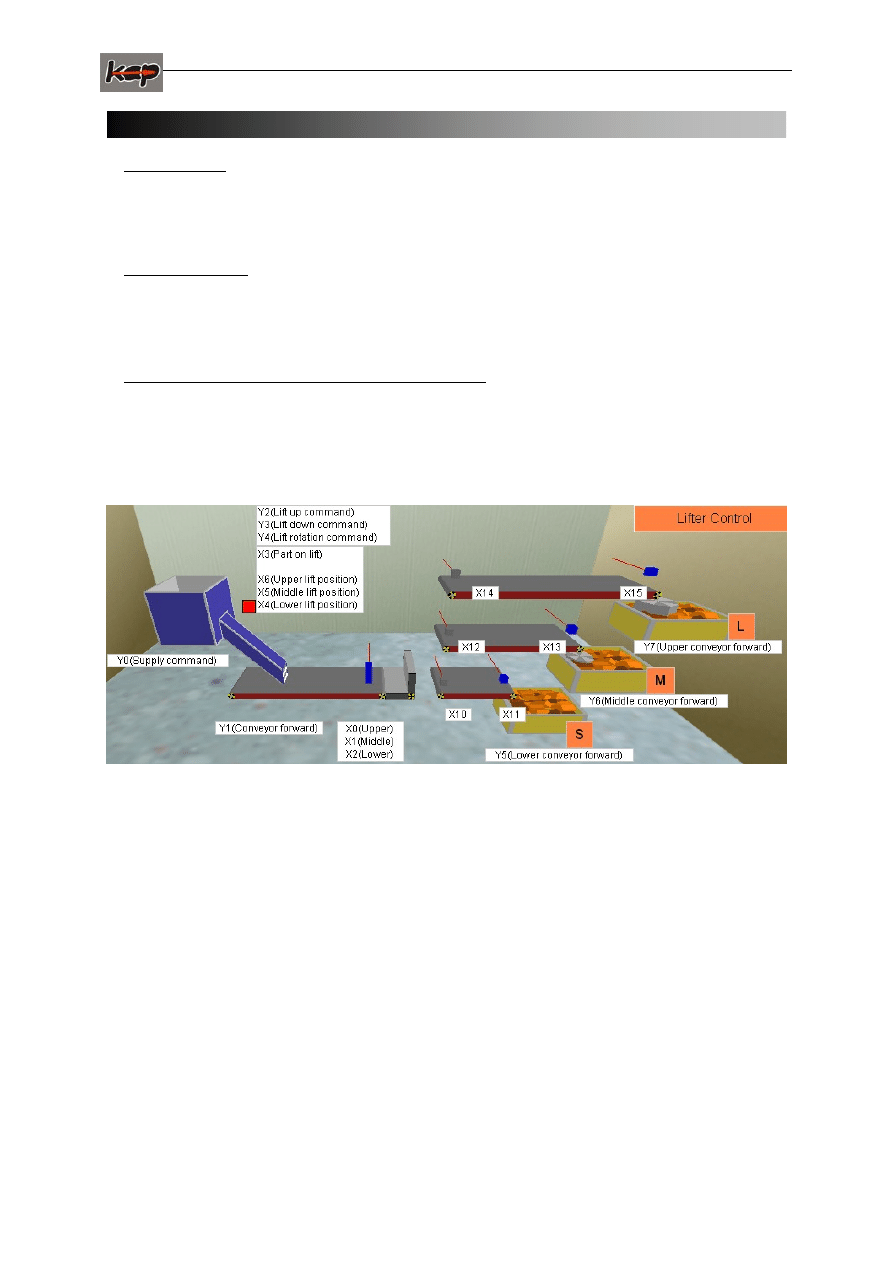
W programie FX Trainer wypieramy przykład F-6. Aby zobaczyć całe urządzenie w opcji Help wybieramy
Guidance aby przejść do edycji programu wciskamy Edit Ladder
Naszym zadaniem jest napisanie programu obsługi poniższego obiektu. Wyroby z podajnika (Y0) mają być
przetransportowane do pojemników L, M, S w zależności od ich wielkości. Do wykrywania wielkości mamy
trzy czujniki optyczne X0, X1, X2.
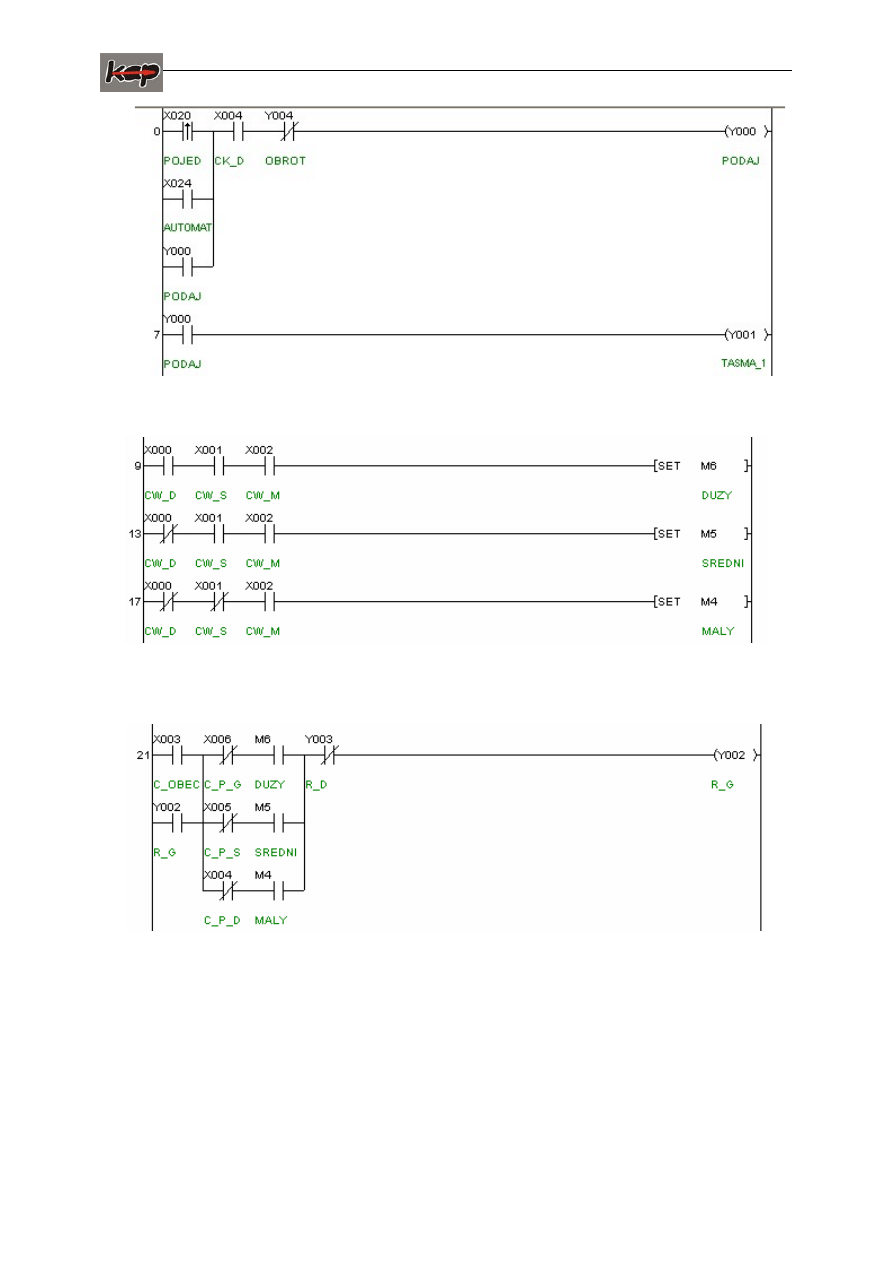
a) uruchomienie podajnika
Zakładamy, że uruchomienie podajnika (Y0=1) może nastąpić pod warunkiem, że
podnośnik znajduje się w dolnym położeniu (X4=1) oraz podnośnik nie jest odwrócony.
Jeżeli załączone jest wejście X24 to podawanie następuje automatycznie. Jeżeli wejście
X24 nie jest załączone to możemy wymusić podanie wyrobu ręcznie (X20). Jeżeli
włączony jest podajnik to również uruchomiony jest transporter (Y1)
Podstawy programowania PLC - elementy języka drabinkowego
Wszystkie grafiki, zdjęcia, programy oraz treść instrukcji podlegają ochronie prawnej na mocy ustawy o prawie autorskim. Używanie ich w jakikolwiek sposób bez uprzedniego,
pisemnego zezwolenia wydanego przez AGH jest zabronione i może spowodować pociągnięcie do odpowiedzialności cywilnej i karnej w maksymalnym zakresie dopuszczalnym przez
prawo.
2
Wyniki porównania musimy zapamiętać
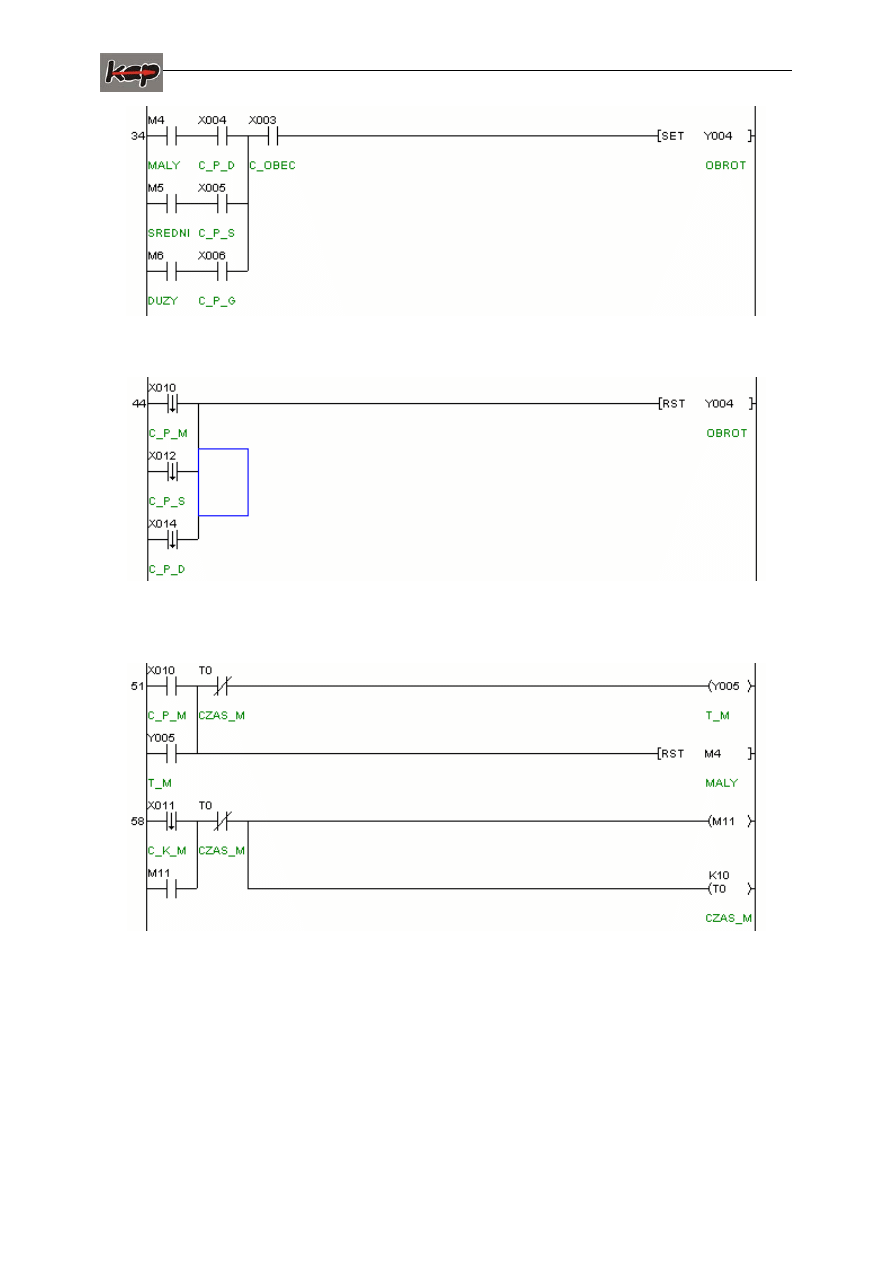
Jeżeli element znajduje się na platformie to uruchomiamy ruch do góry aż do osiągnięcia
odpowiedniego dla wielkości elementu czujnika krańcowego
Jeżeli element osiągnie zadaną pozycje (w zależności od zmierzonej wysokości) to załączamy
obrót (Y4).
Podstawy programowania PLC - elementy języka drabinkowego
Wszystkie grafiki, zdjęcia, programy oraz treść instrukcji podlegają ochronie prawnej na mocy ustawy o prawie autorskim. Używanie ich w jakikolwiek sposób bez uprzedniego,
pisemnego zezwolenia wydanego przez AGH jest zabronione i może spowodować pociągnięcie do odpowiedzialności cywilnej i karnej w maksymalnym zakresie dopuszczalnym przez
prawo.
3
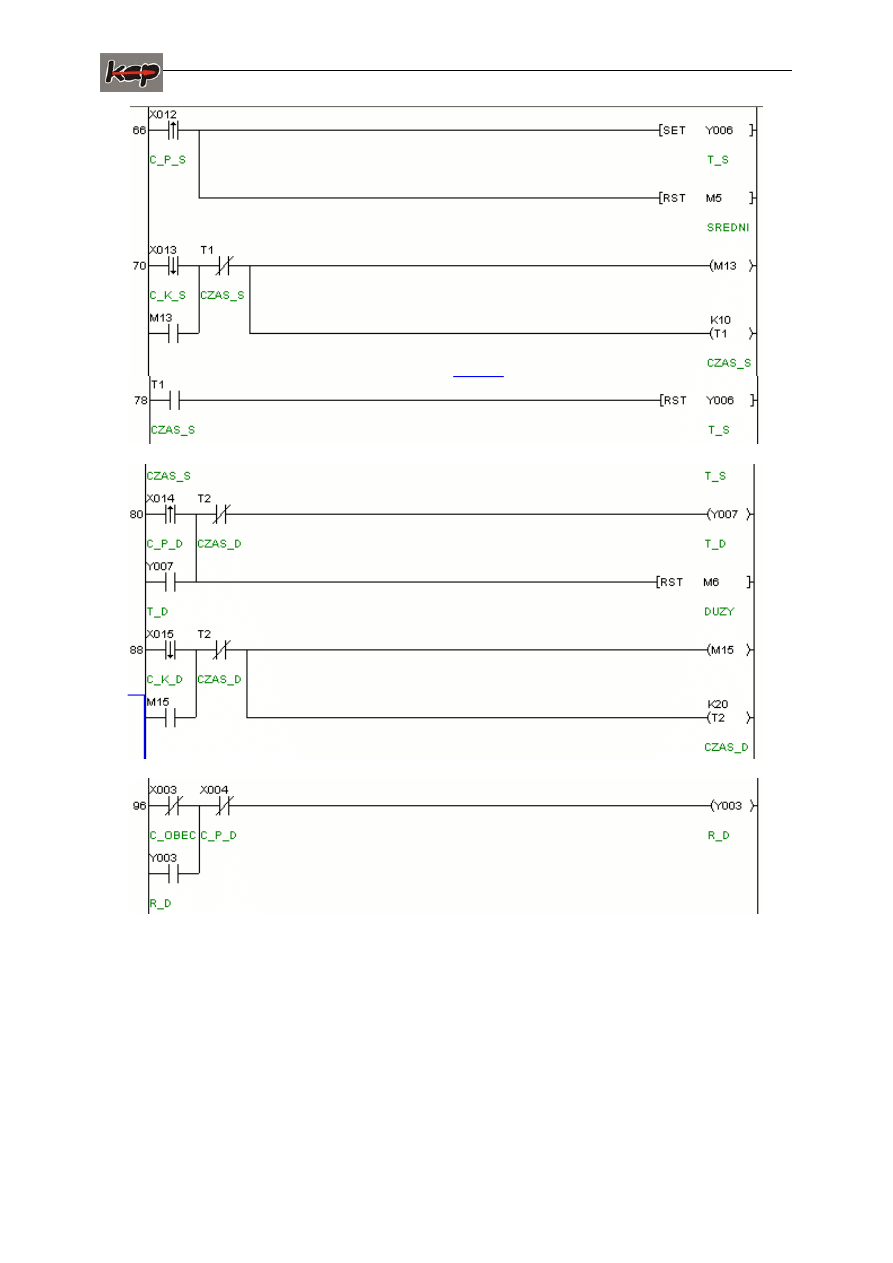
Wyłączenie obrotu i powrót do pozycji wyjściowej ma nastąpić dopiero po
przetransportowaniu elementu za czujniki obecności elementu na taśmie
Zatrzymanie taśmy powinno nastąpić po przejściu elementu przez czujnik obecnosci na końcu
taśmy. (załączenie w tym przypadku następuje dopiero jak element znajdzie się na taśmie ale
można to było zrobić wcześniej)
Dla taśmy elementów średnich pokazano inny sposób załączenia i wyłączenia taśmy
Podstawy programowania PLC - elementy języka drabinkowego
Wszystkie grafiki, zdjęcia, programy oraz treść instrukcji podlegają ochronie prawnej na mocy ustawy o prawie autorskim. Używanie ich w jakikolwiek sposób bez uprzedniego,
pisemnego zezwolenia wydanego przez AGH jest zabronione i może spowodować pociągnięcie do odpowiedzialności cywilnej i karnej w maksymalnym zakresie dopuszczalnym przez
prawo.
4
To samo dla elementów dużych
Jeżeli wypakowaliśmy element to możemy powrócić do pozycji dolnej
UWAGA
1. Zmodyfikuj program tak aby po załadowaniu trzech elementów zapaliły się lampki
odpowiednio: Y20 – 3 małe, Y21 – trzy średnie, Y22 – trzy duże.
2. Jeżeli wszystkich elementów będzie przynajmniej 3 w każdym pudełku to zatrzymaj
proces – ponowne uruchomienie wciśnięciem przycisku x21
3. Zmierz czas potrzebny do transportu poszczególnych elementów, zapisz czasy
transportu odpowiednio do rejestrów D0, D1, D2.

Podstawy programowania PLC - elementy języka drabinkowego
Wszystkie grafiki, zdjęcia, programy oraz treść instrukcji podlegają ochronie prawnej na mocy ustawy o prawie autorskim. Używanie ich w jakikolwiek sposób bez uprzedniego,
pisemnego zezwolenia wydanego przez AGH jest zabronione i może spowodować pociągnięcie do odpowiedzialności cywilnej i karnej w maksymalnym zakresie dopuszczalnym przez
prawo.
5
Wyszukiwarka
Podobne podstrony:
cw6 PLC elementy automatyki prz Nieznany
ćw5 PLC elementy automatyki przemysłowej
Spr 1, AGH IMIR Mechanika i budowa maszyn, III ROK, Elementy automatyki przemysłowej, EAP lab1
Elementy automatyki przemyslowe 8 id 159969
tabelka, AGH IMIR Mechanika i budowa maszyn, III ROK, Elementy automatyki przemysłowej, elementy aut
EAP-projekt, AGH IMIR Mechanika i budowa maszyn, III ROK, Elementy automatyki przemysłowej, elementy
Spr 1, Studia AGH IMIR, Elementy Automatyki Przemysłowej, Mateusz Romaszko
sprawko 8, agh, III rok, eap, Elementy Automatyki Przemysłowej, EAP, eap sprawka 4,5,6,7,8
Elementy automatyki przemysłowej test
Statyczne badanie przerzutników, Studia AGH IMIR, Elementy Automatyki Przemysłowej, Mateusz Romaszko
sprawkoplc, Semestr IV, Elementy automatyki przemysłowej
cw5 PLC elementy automatyki prz Nieznany
tabelka - Kopia, AGH IMIR Mechanika i budowa maszyn, III ROK, Elementy automatyki przemysłowej, elem
Projekt (przejazd), AGH IMIR Mechanika i budowa maszyn, III ROK, Elementy automatyki przemysłowej, e
Spr 1, AGH IMIR Mechanika i budowa maszyn, III ROK, Elementy automatyki przemysłowej, EAP lab1
Wybrane elementy automatyki instalacyjnej
Elementy automatyki1
więcej podobnych podstron