Politechnika Wrocławska
Instytut Energoelektryki Wydział Elektryczny |
SKŁAD GRUPY
|
Rok studiów III Studia dzienne Semestr VI Rok akad. |
||
Laboratorium z podstaw automatyki |
||||
Grupa laborat. |
Numer ćwiczenia |
Temat: Bezpośrednie sterowanie |
Ocena |
|
Data wykon. Ćwiczenia
|
5 |
cyfrowe. |
|
|
Cel ćwiczenia :
Ćwiczenie miało na celu zapoznanie się z praktycznym określaniem nastaw cyfrowych regulatorów PID oraz badanie ich właściwości na wybranych przykładach.
Badanie odpowiedzi na skok jednostkowy:
1.Układ I rzędu
Schemat blokowy układu
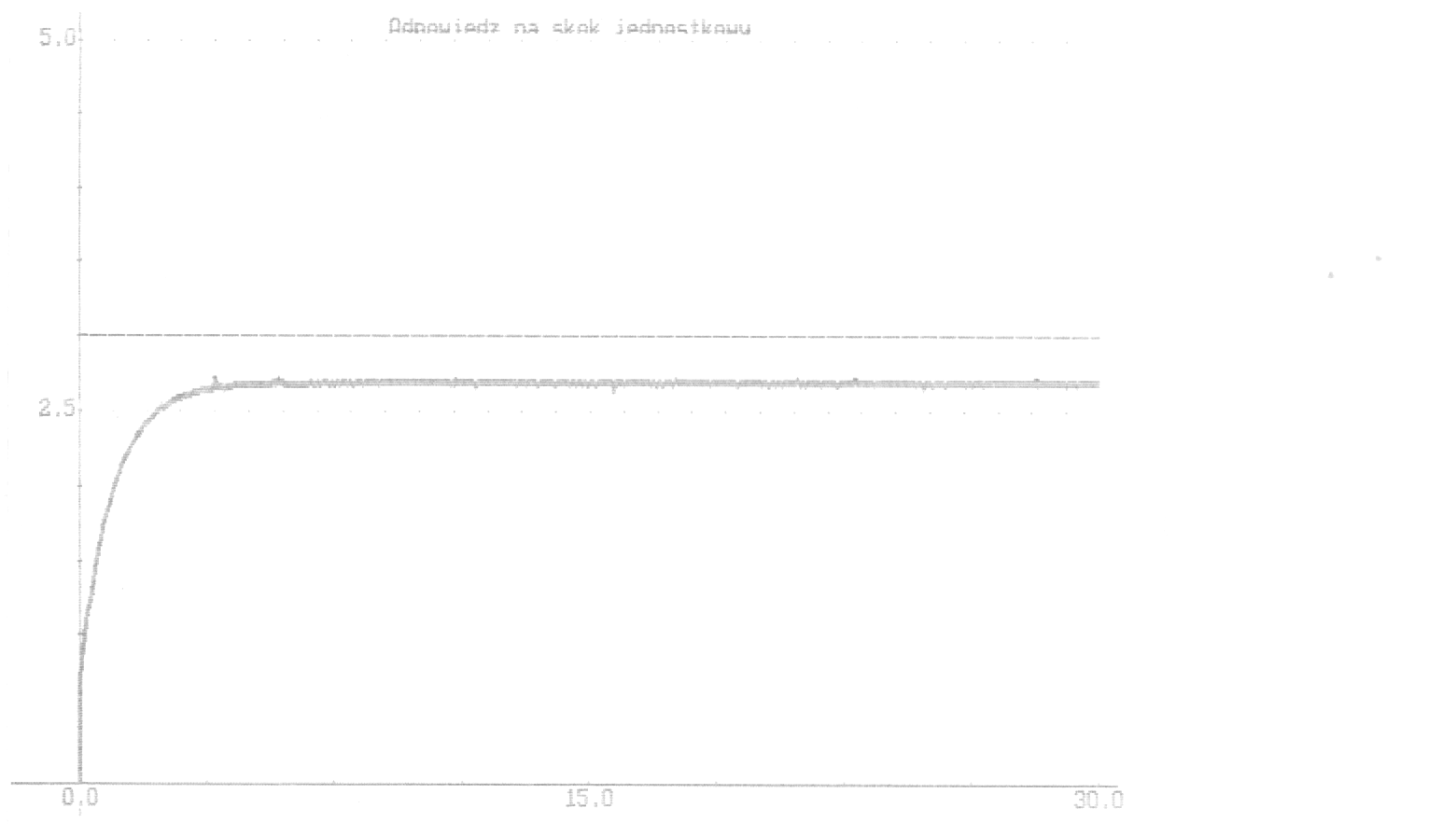
Odpowiedź na skok jednostkowy
Układ II rzędu
Schemat blokowy układu
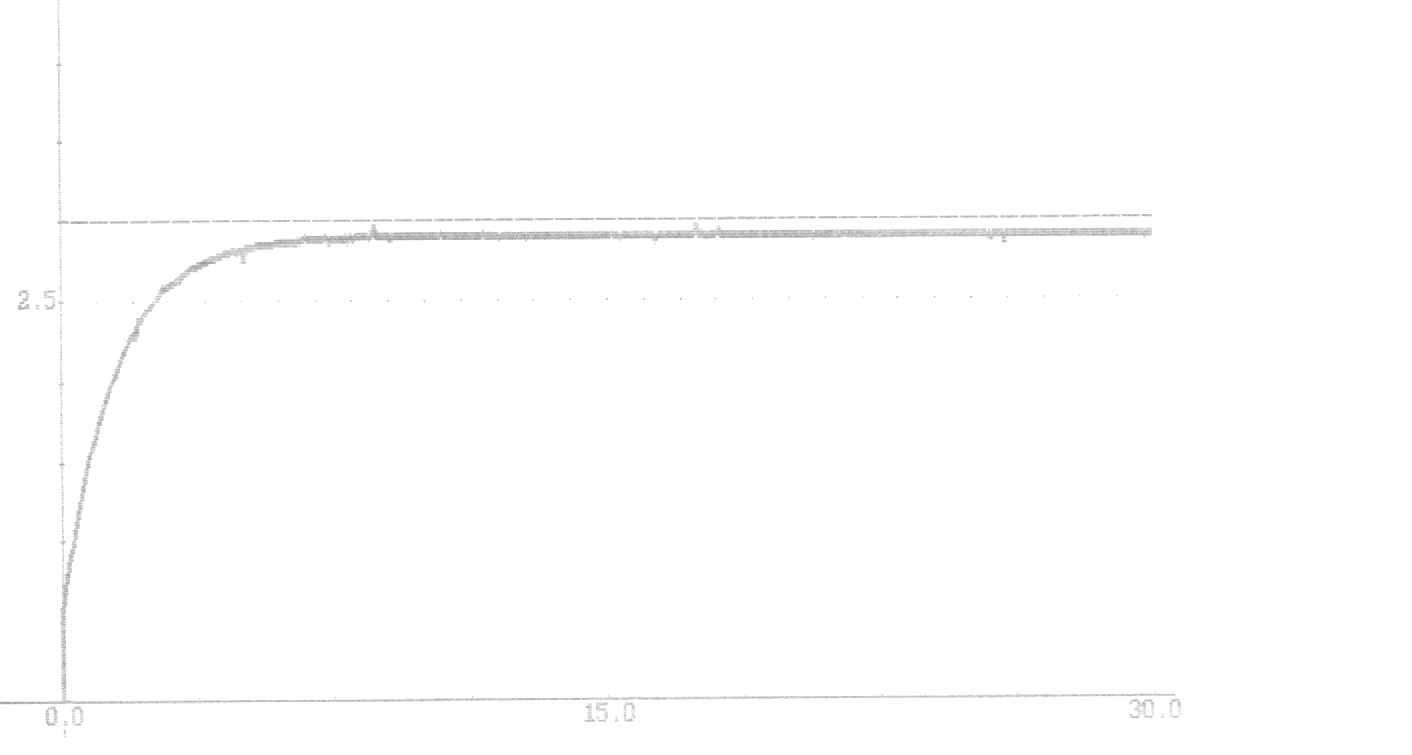
Odpowiedź na skok jednostkowy
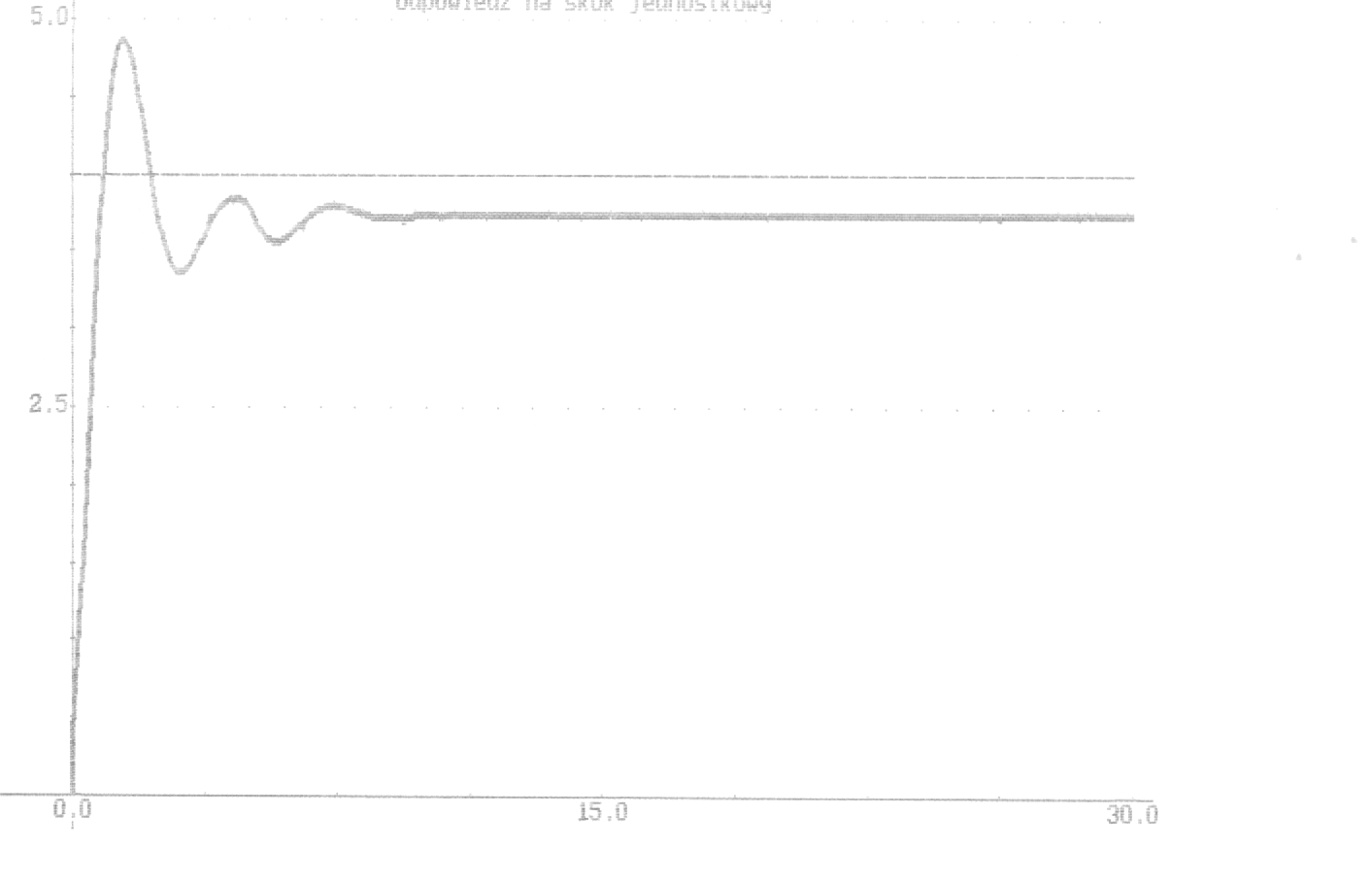
Układ III rzędu
Schemat blokowy układu
Odpowiedź na skok jednostkowy
Dobór parametrów regulatora PID
Wartości uzyskane z pomiarów układu III rzędu na granicy stabilności:
Kgr=3,3 , Tosc= 1,6 s , Tp=50ms
Dobór parametrów regulatora PID.
Ki= , Kd=, Kp= 0,6Kgr-0,5Ki
Ki= 0,13 Kd= 7,9 Kp= 1,92
Odpowiedzi na skok jednostkowy regulatorów PID:
Odpowiedź na skok jednostkowy dla Ki= 0,13 ; Kd= 7,9 ; Kp= 1,92
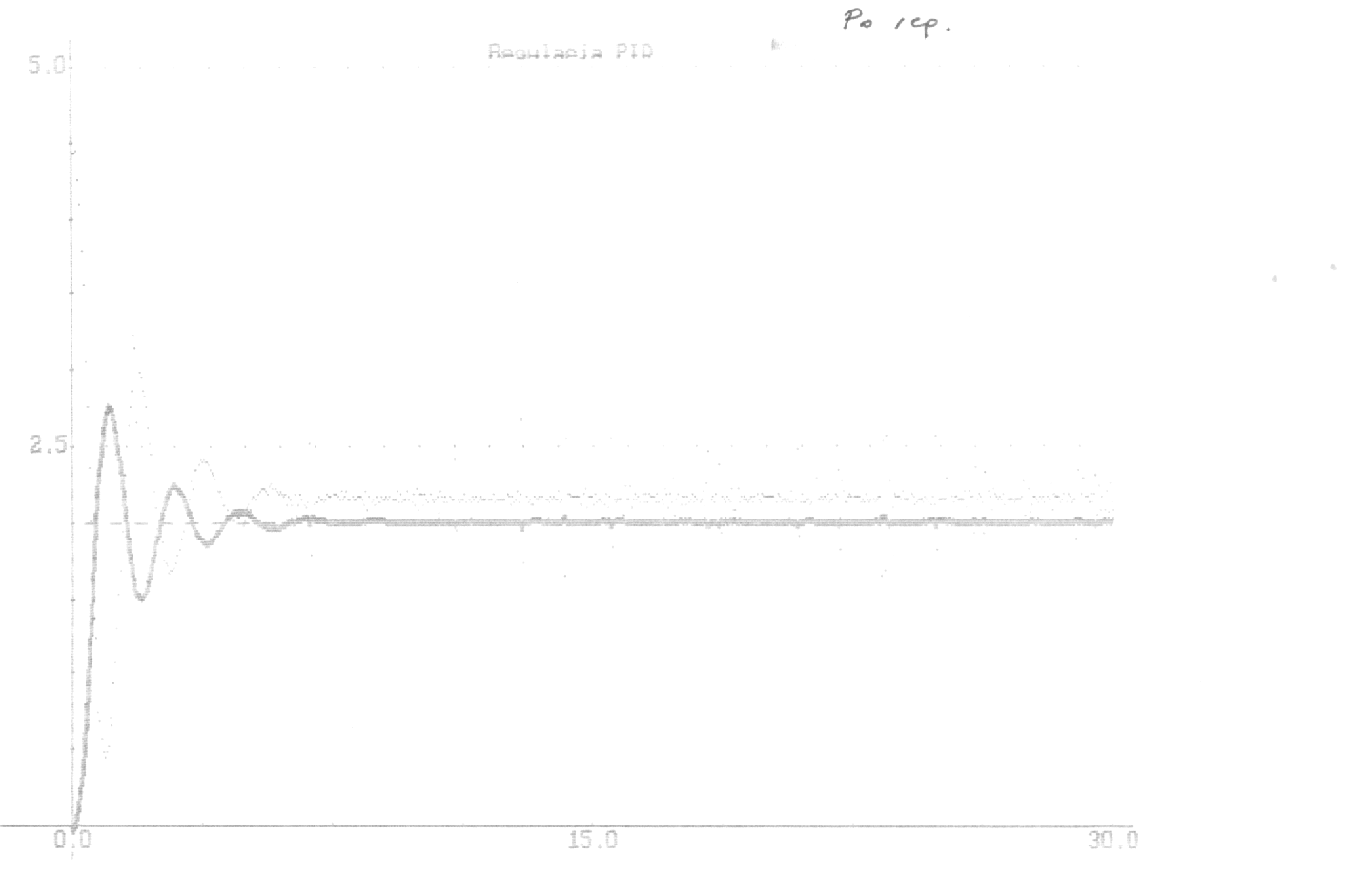
Wnioski.
Na wstępie ćwiczenia zapoznano się z obsługą systemu komputerowego, a następnie dla układów I ,II i III rzędu dokonano pomiarów obrazując w postaci wykresów odpowiedzi na skok jednostkowy. Następnie wyznaczono parametry regulatora oraz PID stosując metodę granicy stabilności. Dla uzyskanych parametrów regulatora zbadano jego odpowiedź na skok jednostkowy . Zmieniając wartości współczynników Kd, Ki, Kp obserwowano ich wpływ na odpowiedź układu regulacji . Zwiększenie wartości współczynnika Kd spowodowało skrócenie czasu ustalania i zmniejszenie przeregulowania.
Zmniejszenie wartości współczynnika Ki spowodowało wydłużenie czasu ustalania oraz zmniejszenie przeregulowania, natomiast zwiększenie wartości wpłynęło na znaczne zwiększenie przeregulowania. Regulacja współczynnika Kp miała wpływ na czas ustalania i zwiększenie jego wartości spowodowało znaczny wzrost czasu ustalania.
1
1
k = 1
T = 0,1 s
T1 = 2 s
T2 = 0,2 s
k = 1
T1 = 1 ms
T2 = 0,5 s
k = 1
T = 0,1 s
Wyszukiwarka