Rok II A. i R. |
LELEK PAWEŁ GRZEGORZ MALCHEREK |
11-II-1998 |
Ćw. nr 3
|
BADANIE REGULATORA PID
|
|
Celem ćwiczenia jest zapoznanie się z zasadą działania, charakterystykami oraz ze sposobami wyznaczania nastaw regulatora PID.
1. Badanie poszczególnych członów regulatora.
Na regulator został podany sygnał prostokątny o amplitudzie 0,8 V. Badanie polegało na wyznaczeniu wzmocnienia oraz czasu zdwojenia Ti. Zbadane zostały odpowiedzi regulatora przy:
wyłączonym różniczkowaniu : regulator PI
wyłączonym całkowaniu : regulator PD
włączonych wszystkich członach: PID
W przypadku a) zmienialiśmy wartość nastawy czasowej członu całkującego co odpowiada dwóm przebiegom odpowiedzi na wymuszenie skokowe: kolor zielony i czarny, kolor czerwony to amplituda sygnału wejściowego 0,8V.
W przypadku b) zmienialiśmy wartość nastawy czasowej członu różniczkującego. Na charakterystykach zostało to także nakreślone dwoma kolorami.
W przypadku c) zmienialiśmy zarówno nastawy członu różniczkującego jak i całkującego.
2. Wyznaczenie charakterystyki amplitudowo-częstotliwościowej regulatora.
W celu wyznaczenia charakterystyki a-f podaliśmy na wejście regulatora sygnał sinusoidalnie zmienny o stałej amplitudzie = 2V i o zmiennej częstotliwości. Badając przebieg sygnału wyjściowego na oscyloskopie mierzyliśmy jego amplitudę, oraz wzmocnienie regulatora. Wyniki zanotowaliśmy w poniższej tabeli:
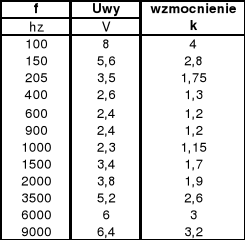
Na podstawie zanotowanych wyników wykreślamy charakterystykę a-f
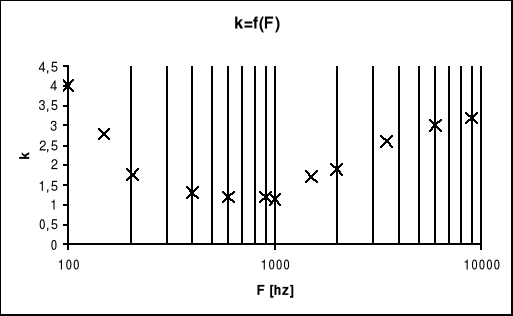
Z wykreślonej charakterystyki odczytujemy wartości nastaw członu całkującego i różniczkującego:
1/ Ti = 260 hz Ti = 4,3 ms
1/Td = 1050 hz Td = 0,9
3. Wyznaczenie nastaw regulatora za pomocą odczytu z oscyloskopu.
W celu dokładniejszego wyznaczenia nastaw regulatora podajemy na jego wejście odpowiednie sygnały. Aby wyznaczyć nastawę Ti podajemy na regulator z wyłączonym członem różniczkującym sygnał skokowy i z przebiegu odpowiedzi wyznaczamy czas zdwojenia Ti - charakterystyka e). W celu wyznaczenia czasu wyprzedzenia Td członu różniczkującego na wejście regulatora z wyłączonym członem całkującym podajemy sygnał liniowo narastający, w naszym przypadku piłokształtny, a odpowiedź obserwujemy na oscyloskopie - ch-ka d).
4. Uwagi i wnioski.
Regulator PID zachowuje się jak zwykły obiekt o członach P- proporcjonalnym , I-całkującym i D- różniczkującym. Regulatory stosuje się do korekcji układu dynamicznego, do poprawy jego własności statycznych i dynamicznych. Najczęściej wykorzystuje się jeden z typów gotowych fabrycznych regulatorów, którego typ oraz nastawy należy dobrać tak, aby spełnić wymagania narzucone na układ regulacji.
W punkcie 1. badaliśmy reakcje regulatora przy różnych nastawach wyznaczając te nastawy z przebiegu odpowiedzi. Wyznaczyliśmy:
Ti - czas zdwojenia, jest to czas potrzebny na to, aby przy wymuszeniu skokowym, część sygnału wyjściowego tego regulatora, wywołana całkowaniem stała się równa części sygnału wyjściowego wywołanej działaniem proporcjonalnym.
Td- czas wyprzedzenia, jest to czas, po upływie którego, w przypadku podania na wejście regulatora sygnału narastającego liniowo, sygnał związany z działaniem proporcjonalnym zrówna się z sygnałem pochodzącym od działania różniczkującego.
W punkcie 2. wyznaczyliśmy czasy Ti i Td na podstawie ch-ki a-f, jednak nie jest to metoda dosyć dokładna. Z tej ch-ki można wyznaczyć przedział częstotliwości w którym regulator ma stałe wzmocnienie. W naszym przypadku wynosi on ok. 230 do 1000 hz.
W celu dokładnego wyznaczenia nastaw regulatora w punkcie 3. podaliśmy na wejście odpowiednie sygnały i z oscyloskopu odczytaliśmy nastawy.
Na podstawie zbadanych przebiegów stwierdzamy, że człon różniczkujący regulatora działa tylko przy zmianach sygnału wejściowego, a przy sygnale stałym wyłącza się, natomiast człon całkujący działa cały czas „sumując" sygnał wejściowy.
Przy dużych częstotliwościach zmian sygnału wejściowego człon D regulatora może powodować jego niestabilność, co wymaga nastawy odpowiednio dużego czasu wyprzedzenia Td.
Badanie regulatora PID
3
Wyszukiwarka